Embed Size (px)
Citation preview
Introduction to Process Control and
Instrumentation

Introduction - 2
Definition of system
systeminput output

Introduction - 3
Types of control systems
Process-control
Servomechanisms
A
B
Introduction - 4
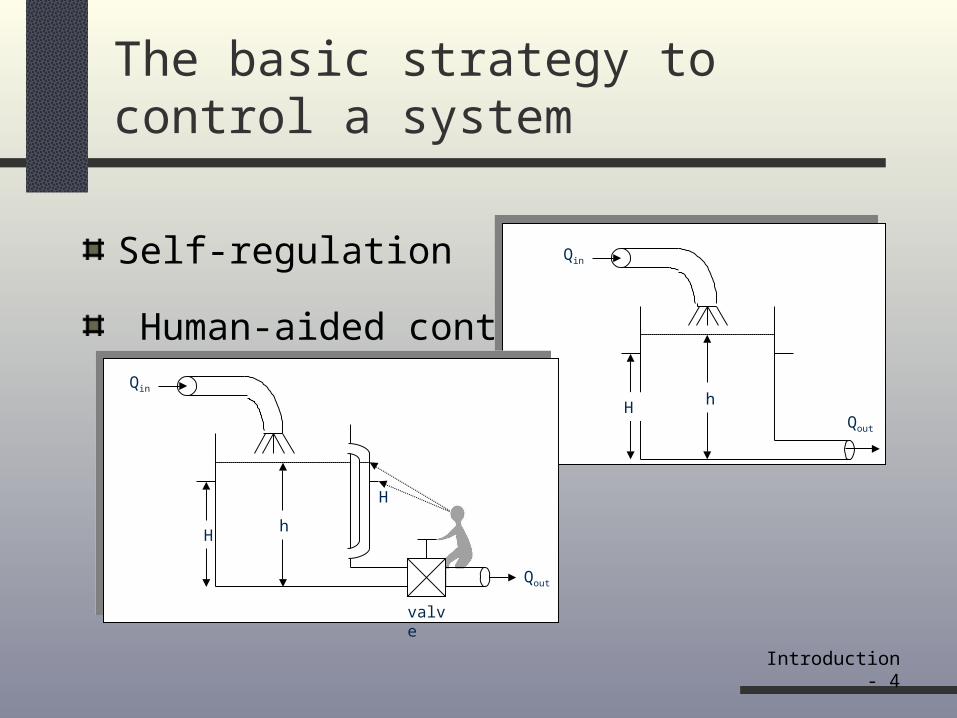
The basic strategy to control a system
Self-regulation
Human-aided control
H h
Qin
Qout
H h
Qin
Qout
H
valve
Introduction - 5
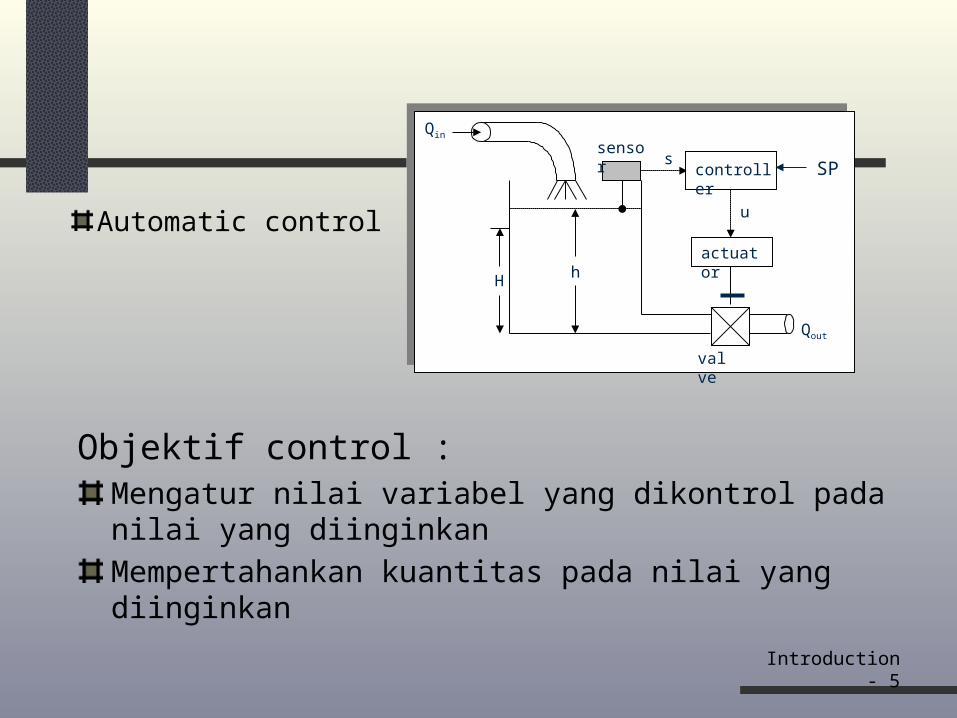
Objektif control : Mengatur nilai variabel yang dikontrol pada nilai yang diinginkan Mempertahankan kuantitas pada nilai yang diinginkan
H h
Qin
Qout
valve
actuator
controllersensor s
u
SP
Automatic control
Introduction - 6
Open-loop control
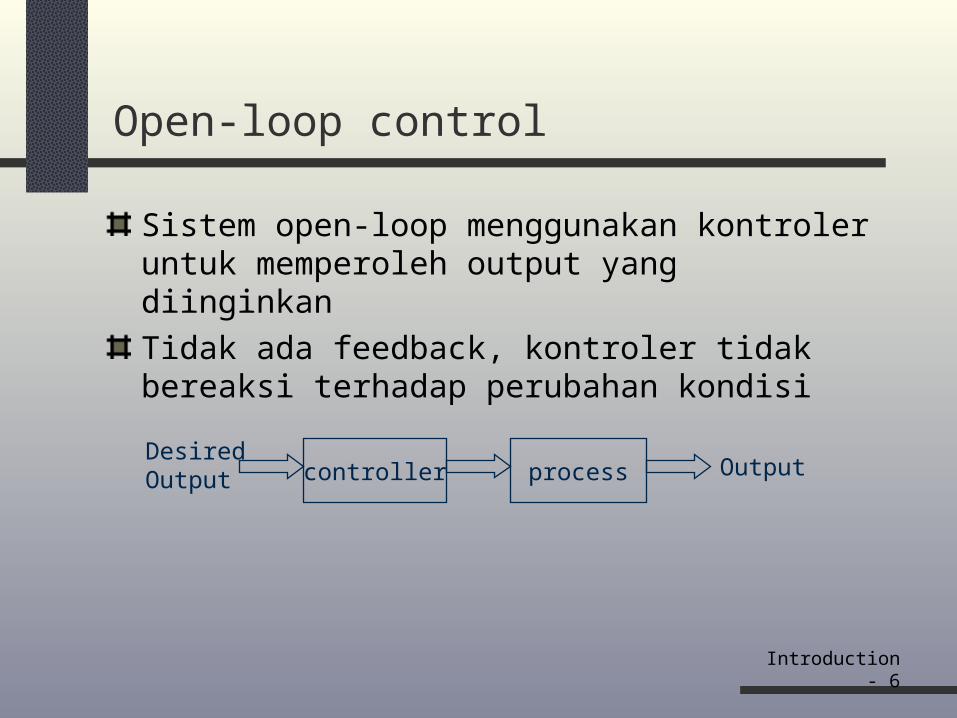
Sistem open-loop menggunakan kontroler untuk memperoleh output yang diinginkanTidak ada feedback, kontroler tidak bereaksi terhadap perubahan kondisi
controller processDesired Output Output

Introduction - 7
Advantages and disadvantages
murah sederhana
o akurasi kurango model sistem harus akurato tidak ada jaminan bahwa
proses yang dikontrol sesuai dengan set valueo tidak dapat meng-handle
gangguan (disturbances)

Introduction - 8
Closed-loop control
sistem closed-loop menggunakan informasi sensor untuk menyesuaikan (to adjust) output kontroler
Control element ProcessDesired Output
Measurement
Controller Actual Output
Introduction - 9
Advantages and disadvantages
dapat meng-handle gangguan (disturbances)akurat
Instability dapat terjadi karena kesalahan nilai gain dan parameter pemodelan

Introduction - 10
The element of process-control system
Elemen-elemen process-control Process Measurement Controller Error Detector (comparison) Control element
Diagram blokcontroller
Control element
process
measurement
SP

Introduction - 11
Physical diagram of a process-control loop
Flow system
controller I/P
4 -20 mA4 -20 mA
Signal conditioning
Diff. pressure transducer
orifice
Control valve
3 – 15 psi
setpoint

Introduction - 12
Example: analog control
T
heater
oven
Measurement system
+
controllerVQVe=Vref - VT
VT
-
Vref
Introduction - 13
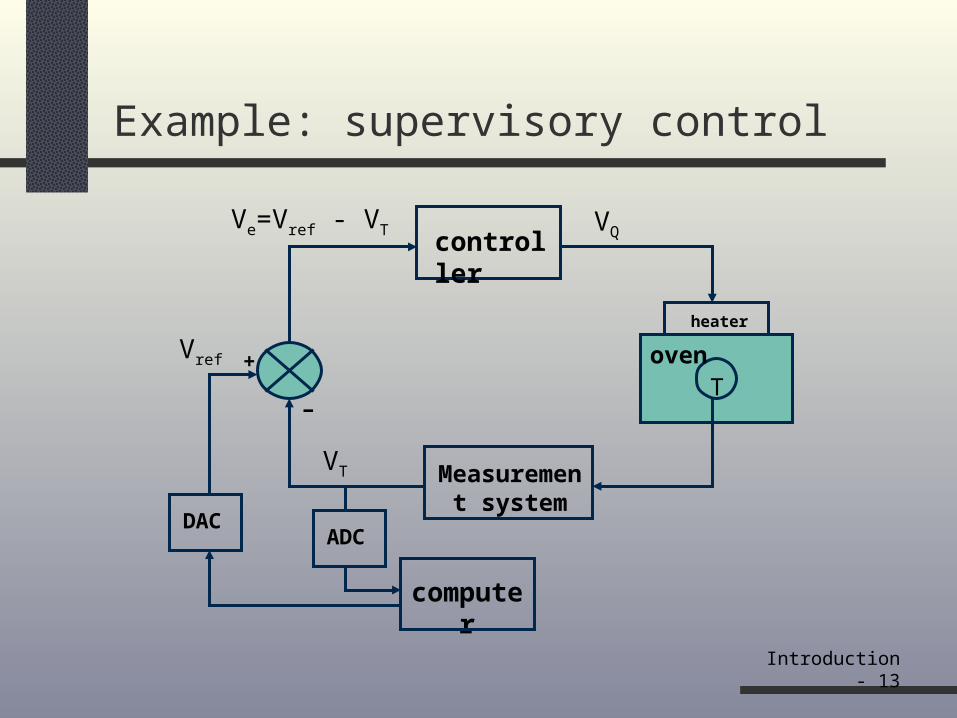
Example: supervisory control
T
heater
oven
Measurement system
+
controllerVQVe=Vref - VT
VT
-
computer
ADCDAC
Vref
Introduction - 14
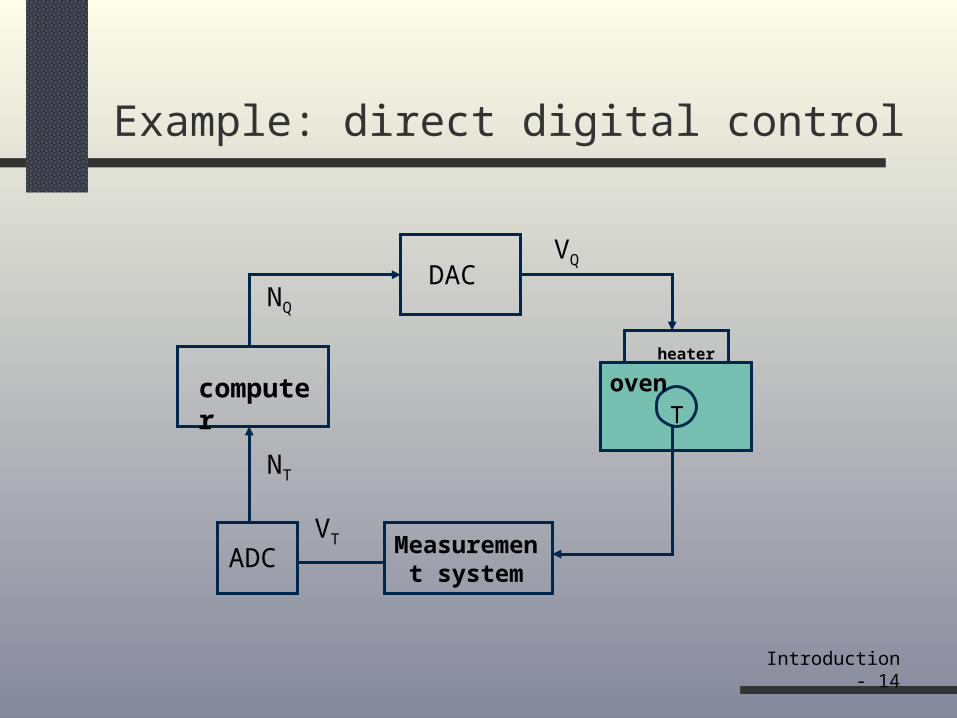
Example: direct digital control
T
heater
oven
Measurement systemADC
computer
DACVQ
NQ
VT
NT
Introduction - 15
The time response of control system
Transient responseRespon diamati mulai state awal ke state akhir • Rise time• Delay time• Percent overshoot• Settling time
Steady state response Perilaku respon dari steady state sampai tak hinggao percent error steady state
Introduction - 16
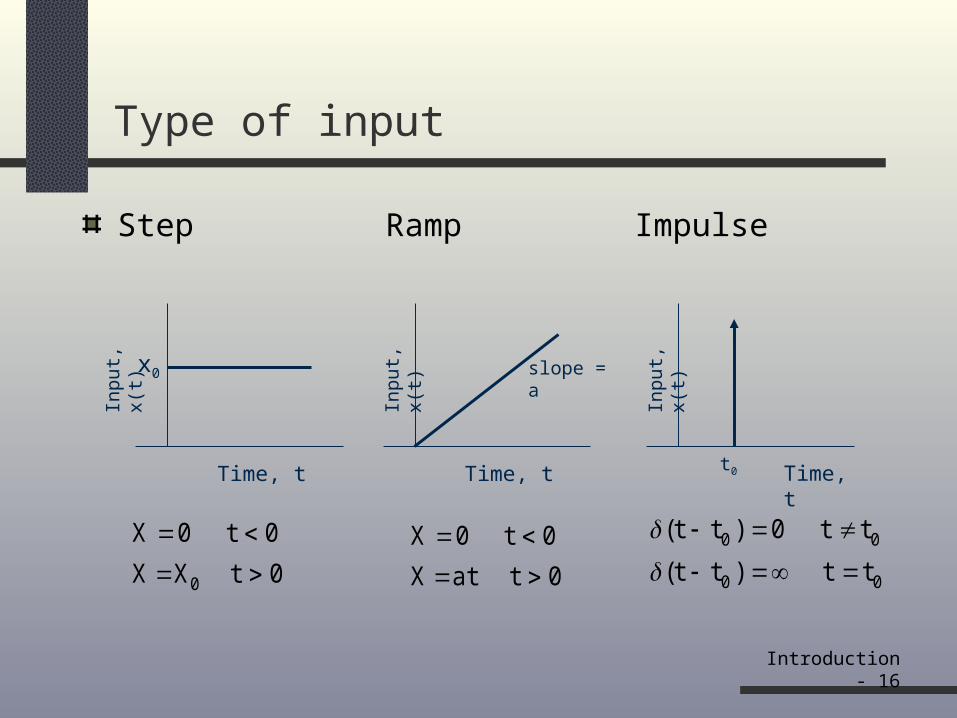
Type of input
Step Ramp Impulse
Inpu
t, x(
t)
x0
Time, t
Inpu
t, x(
t)
Time, t
slope = a
Inpu
t, x(
t)
Time, tt0
0t X X0t 0X
0
0t at X0t 0X
00
00tt )tt(tt 0)tt(

Introduction - 17
General form of linear differential equations
)t(xb)t(yadt
ydadtyda 001n
1n
1nn
nn
y(t) = output
x(t) = fungsi input
n = orde dari sistem
t = waktu

Introduction - 18
Transfer function
)t(xb)t(yadtdya 001 )t(Kxydt
dy
ty)(sensitivi gain static a
b K
constant time aa
00
01
)s(KX)1s )(s(Y
s 1K
)s(X)s(YTF

Introduction - 19
Process element characteristic
GainPerubahan input menyebabkan perubahan output secara cepatAktuator mempunyai gain dalam unit (besaran) yang tetap
Control valve akan : tertutup penuh pada tekanan pneumatik 3 psi terbuka penuh pada tekanan pneumatik 15 psi
psimenit/literTF
Introduction - 20
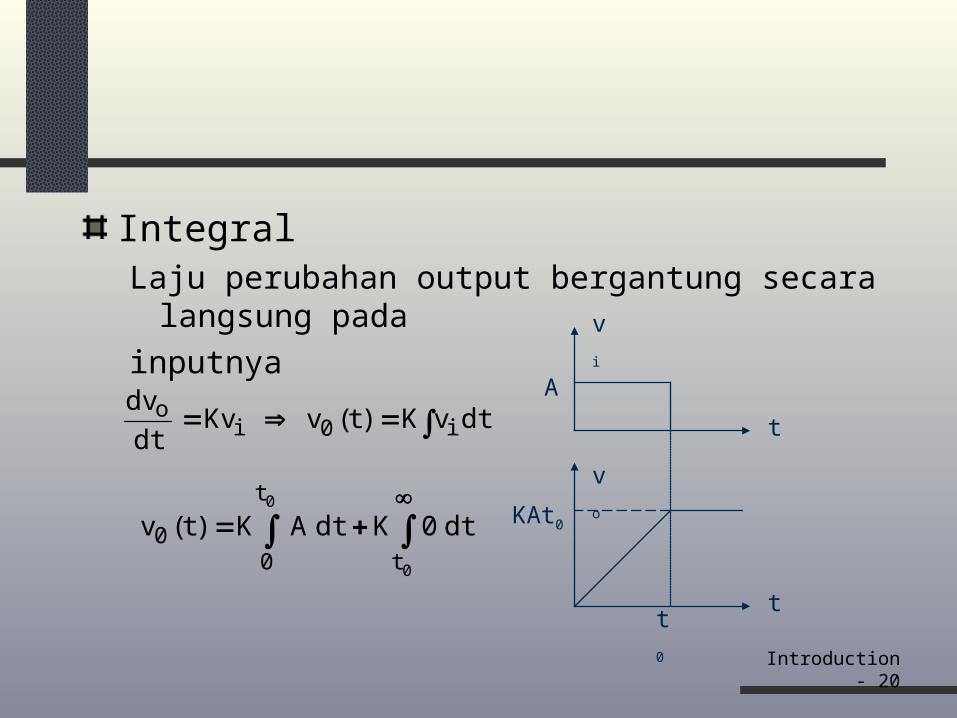
IntegralLaju perubahan output bergantung secara langsung padainputnya
dt vK)t(v Kvdtdv
i0io
vi
vo
t0
KAt0
A
t
t
0
0
t
0 t0 dt 0 Kdt A K)t(v
Introduction - 21
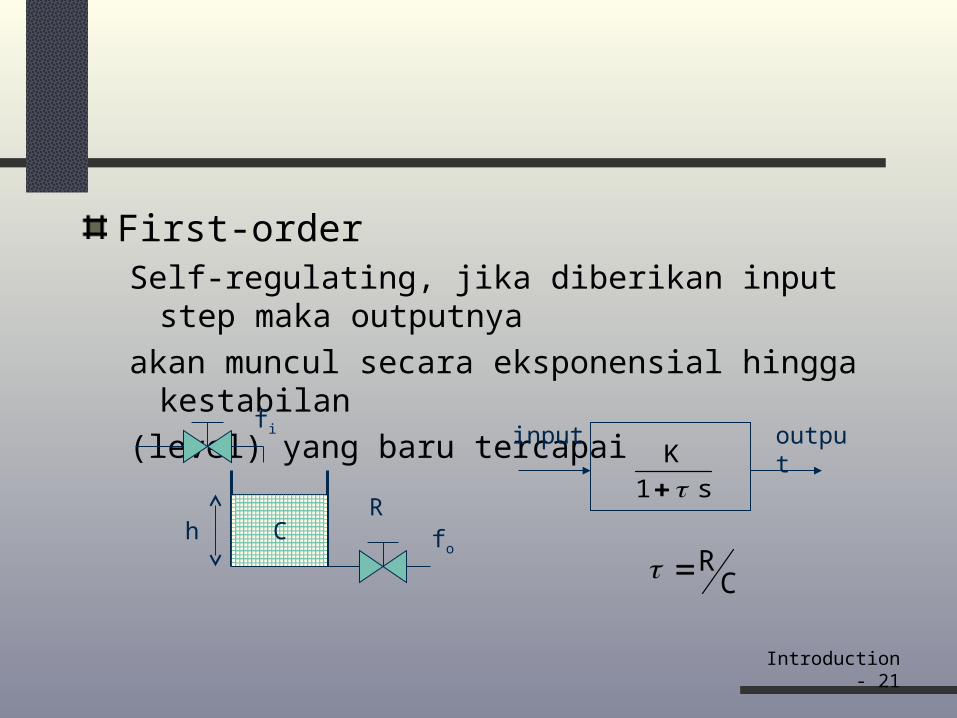
First-orderSelf-regulating, jika diberikan input step maka outputnyaakan muncul secara eksponensial hingga kestabilan(level) yang baru tercapai
h CR
fi
fo
s 1K
input output
CR
Introduction - 22
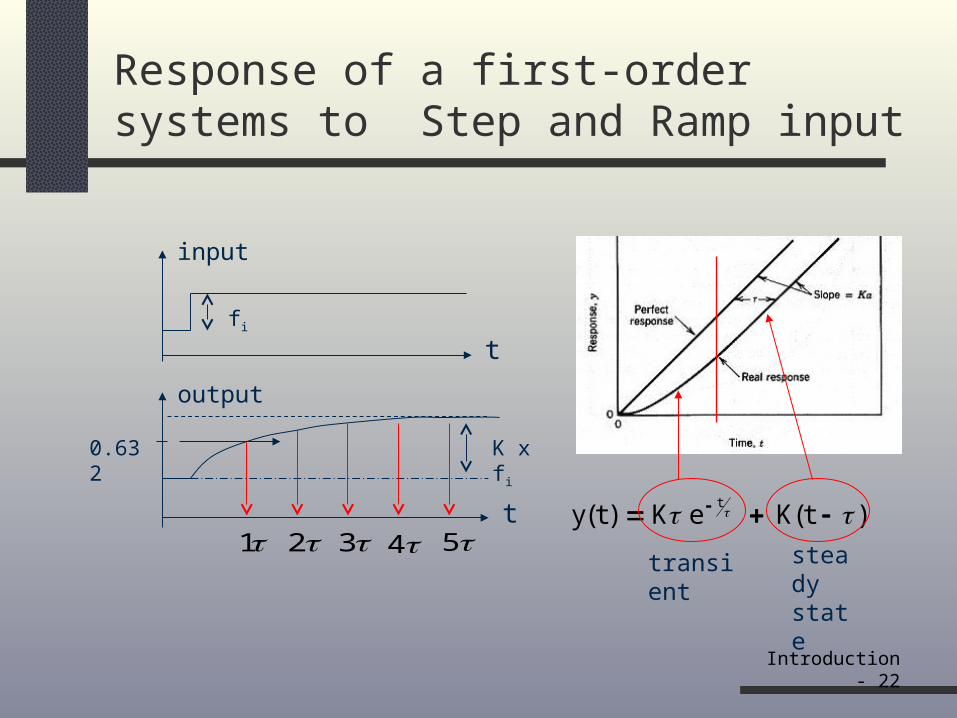
Response of a first-order systems to Step and Ramp input
0.632
1
K x fi
fi
32 54t
input
outputt
)t(K e K )t(y t
transient steady state

Introduction - 23
Performance Specifications
Rise time Time to pass from 10% to 90% of final value (steady)
Settling time Time to reach the final value
Delay time Time to reach 50% of final value
You need 5 time constants before you can consider output to be steady-state (settling time)
Introduction - 24
Dead timePerubahan pada input tidak menyebabkan perubahan
output hingga waktu delay (dead) terlampauiBiasanya merupakan delay transportasi (ada jarak yang harus
dilampaui)Contoh: water heater
Proses di industri banyak berupa dead time dan first-order. Jika diberikan input step pada proses maka output berubah setelah waktu delay terlampaui lalu muncul secara eksponensial.
Introduction - 25
Second-order
dua akar karakteristik real berbeda ζ >1 overdamped real sama ζ = 1 critically damped kompleks konjugat 0 < ζ < 1 underdamped
2nn
2
2n
s2s)s(X)s(Y
1s 2nn
ratio damping : frequency natural : n
Introduction - 26
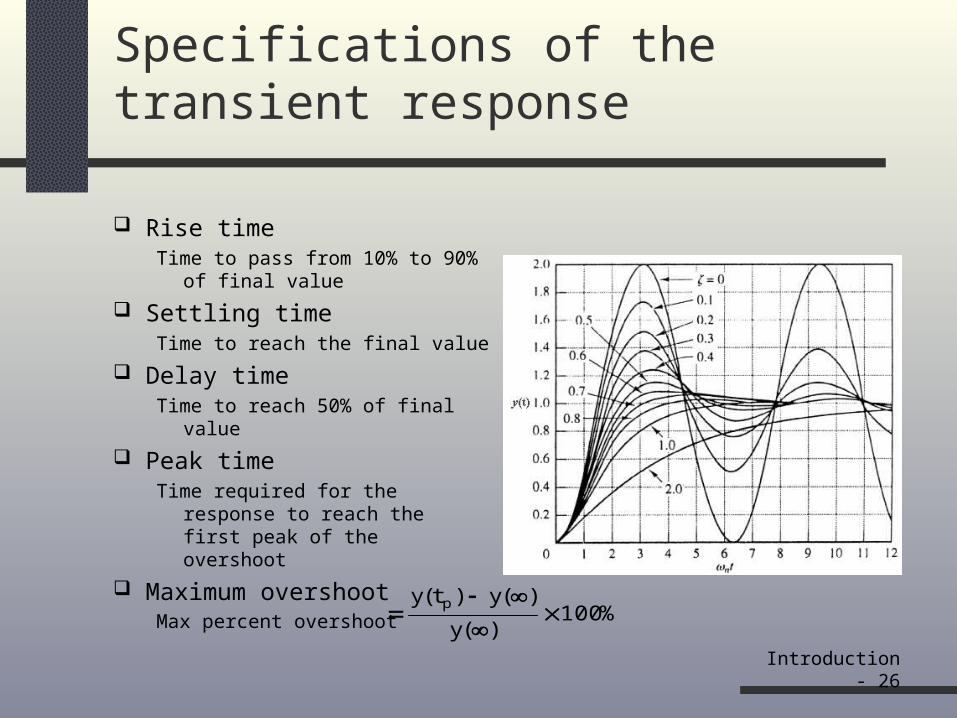
Specifications of the transient response
Rise timeTime to pass from 10% to 90% of
final value Settling time
Time to reach the final value Delay time
Time to reach 50% of final value Peak time
Time required for the response to reach the first peak of the overshoot
Maximum overshootMax percent overshoot %100)(y
)(y)t(y p
Introduction - 27
Measurement intrument spesifications
Performansi instrumen pengukuran digambarkan dalam dua spesifikasi: Spesifikasi statik (seberapa baik korelasi antara input fisik dan
output listrik) Spesifikasi dinamik (seberapa cepat perubahan output yang terjadi
terhadap perubahan input)
Kuantitas fisik yang diukur diantaranya, posisi, kecepatan, level, flow, temperatur, dll.Output instrumen dapat berupa tegangan, arus, resistansi, kapasitansi, dll
Introduction - 28
Static spesifications
Akurasi digunakan untuk menentukan error maksimum yang diharapkan dari suatu peralatan (dalam % error)
Bentuk : Persentase dari pembacaan full scale (FS)
FS intrumen 5 volt dengan akurasi ± 0.5% volt rata-rata ketakpastian pengukuran ± 0.025 volt
Persentasi dari span (max – min) Akurasi ± 3% dari span tekanan dengan range 20 s/d 50 psi
inakurasinya 30 x 0.03 = ± 0.09 psi Persentase dari pembacaan aktual
Akurasi voltmeter ± 2% inakurasinya ± 0.04 untuk pembacaan 2 volt

Introduction - 29
Static spesifications
Sensitifitas perubahan input yang kecil, intrumen dapat memberikan output (ditunjukkan oleh TF dari instrumen) TF dari transduser termperatur 5mV/0C setiap perubahan input
sebesar 10C menyebabkan output berubah sebesar 5mV.
Resolusi perubahan input terkecil yang menyebabkan terjadinya perubahan pada intrumen readout.
Introduction - 30
Static spesifications
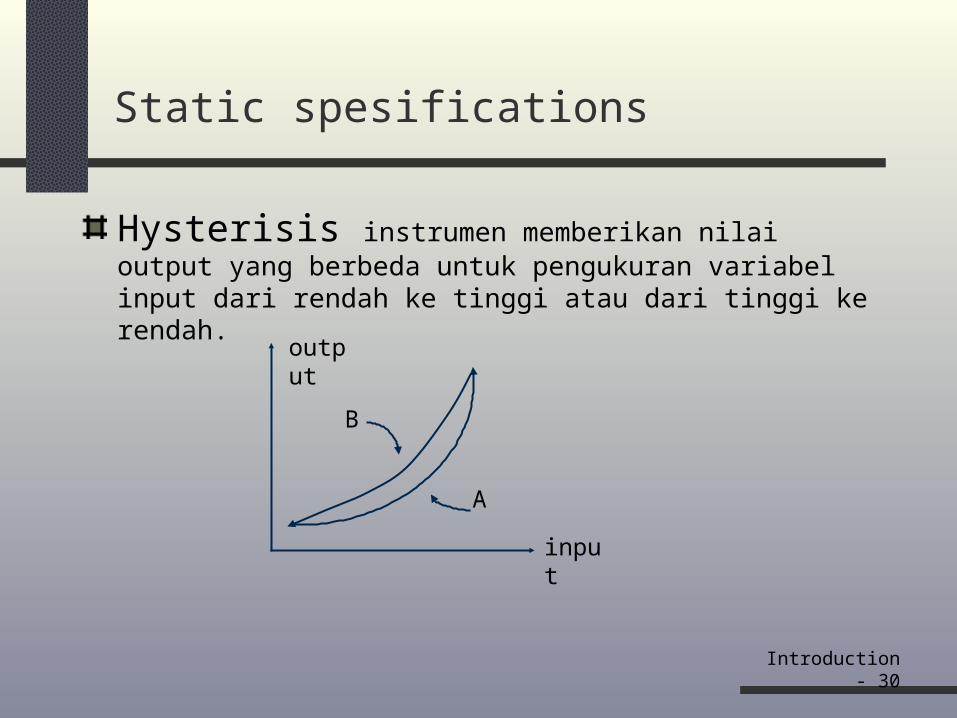
Hysterisis instrumen memberikan nilai output yang berbeda untuk pengukuran variabel input dari rendah ke tinggi atau dari tinggi ke rendah.
A
B
input
output
Introduction - 31
Repeatability (Precision) digunakan untuk mengukur seberapa baik intrumen dapat memberikan output yang sama terhadap suatu input yang diberikan secara berulang-ulang.
Static spesifications
%100scale fullmin maxityrepeatabil
Introduction - 32
Linieritas pemetaan satu-satu antara input-output sebagai fungsi linier.
Contoh:Suatu sensor mengubah temperaturdalam range 20 – 120 0C ke dalam resistansi 100 – 180 ohm. Dapatkan persamaan linier dari resistansi terhadap temperatur.
Static spesifications
T
R
84
Introduction - 33
Dynamic spesifications
Pengukuran respon intrumen terhadap pemberian input : step
Rise time, delay time, time constant, % overshoot, settling time
Sinus Frequency response, high-frequency cutoff





























