Embed Size (px)
Citation preview

Simulation of Local Instabilities during Crack
Propagation in the Ductile-Brittle Transition
RegionArticle published in Eur. J. Mech. A-Solid. 30, 195–203,
http://dx.doi.org/10.1016/j.euromechsol.2010.12.013
Geralf Hütter∗†, Uwe Mühlich∗, Meinhard Kuna∗
The crack propagation for a cohesive zone modelwithin an elastic-plastic material under small-scaleyielding conditions is simulated numerically. Theresulting crack growth resistance curves show lo-cal instabilities, so-called pop-ins even for homoge-neous cohesive properties if the cohesive strengthlies sufficiently close to the maximum stress of thecorresponding blunting solution. The formation ofsecondary cracks and unloading zones in front ofthe actual crack tip is identified as the underlyingmechanism. It is found that the shape of the cohe-sive law has a considerable influence on the crackarrest behavior. Furthermore, requirements to themesh resolution are derived.
1. Introduction
In fracture mechanical experiments with typicalengineering metals in the ductile-brittle transi-tion region, i.e. for low temperatures and/or dy-namic loading, often sudden but limited displace-ment jumps are observed which are accompaniedby a load drop as depicted schematically in fig-ure 1. This behavior is induced by a locally un-stable crack propagation and termed as “pop-in”(ASTM E1290-08ε1, 2008). Pop-ins have been re-ported e.g. for steels (Ripling et al., 1982; Singhand Banerjee, 1991; Neimitz et al., 2010; Dziobaet al., 2010), armco iron (Srinivas et al., 1989),welded joints (Sumpter, 1991a,b), aluminum alloys
∗TU Bergakademie Freiberg, Institute for Mechanics andFluid Dynamics, Lampadiusstr. 4, 09596 Freiberg, Ger-many
(Firrao et al., 1993) or ductile cast iron (Kobayashiand Yamada, 1994).
In many cases, these local instabilities are as-cribed to the initiation and arrest of cracks prop-agating with a cleavage mechanism. In general,the loads at which pop-ins occur scatter consid-erably for several samples of the same material.That is why mostly the initiation of these localinstabilities is attributed to microstructural inho-mogeneities such as inclusions or segregations ofembrittling chemical components. The inhomo-geneities are sometimes termed as “local brittlezones”.
Firrao et al. (1993) and Neimitz, Galkiewicz,and Dzioba (Neimitz et al., 2010; Dzioba et al.,2010) reported the formation of secondary cracksin front of the main crack tip in the context ofpop-ins. A corresponding micrograph is depictedin figure 2. Neimitz, Galkiewicz, and Dzioba aswell as Sumpter (1991b) draw a close interrelation-ship between pop-ins and plastic deformations atthe crack tip.
The assumption of local brittle zones as reasonfor pop-ins motivated the modeling by means of lo-
F
u
pop-in
Figure 1: Load-displacement curve during pop-in
1

main crack
secondary crack
Figure 2: Secondary crack in the cross-section of aspecimen of a ferritic-bainitic steel froman experiment interrupted shortly be-fore the presumed pop-in (Neimitz et al.,2010)
cally fluctuating material properties. For instance,the works of Tvergaard, Needleman and co-workers(Tvergaard and Needleman, 1993; Gao et al., 1996;Needleman and Tvergaard, 2000) or Kabir et al.(2007) can be cited out of this group.
The latter research group applied a cohesivezone model with locally fluctuating strength withinan elastic-plastic bulk material. However, theyalso obtained pop-ins for their first computa-tions with homogeneous cohesive properties. Like-wise, Lin et al. (1999) as well as Li and Sieg-mund (2004) observed local instabilities with cohe-sive zone models of homogeneous strength withinelastic-plastic material. The reasons of the occur-rence of pop-ins was not investigated further.
Siegmund and Needleman (1997) simulated thecrack propagation in a CCT-specimen under im-pact loading also by means of a homogeneous co-hesive zone model within viscoplastic material. Forincreased plastic contributions they observed crackarrest accompanied by the formation of secondaryloading zones around the crack tip. The formationof secondary cracks has been observed for cohesivezone models within constraint metal layers by Linet al. (1997). The decrease of the loading capac-ity due to a priori existent secondary cracks hasbeen extensively studied in the literature, e.g. byTomokazu and Yasufumi (1977), Smith (1988) and
Siegmund and Brocks (2000).
The objective of the present study is to furtherinvestigate the pop-in behavior predicted by a co-hesive zone in plastic bulk material and to gaindeeper insight into the underlying mechanism. Toexclude possible effects of the geometry and vis-cosity the limit case of small-scale yielding is sim-ulated and the bulk material is modeled as rateindependent. Requirements to the mesh resolu-tion are derived. A special focus is drawn on theinfluence of the shape of the cohesive law.
2. Problem Formulation
2.1. Boundary-Value Problem
Following the approach of Tvergaard and Hutchin-son (1992, 1994, 1996), the crack propagation un-der mode I is investigated by means of a cohesivezone under plane strain small-scale yielding con-ditions. As pop-ins are highly dynamic processesinertia is taken into account. The bulk materialis described by an isotropic hypoelastic-plastic for-mulation for large strains with J2-yield surface andisotropic hardening. A one-parametric power lawof hardening is utilized, so that it provides an uni-axial response between true stress and logarithmicstrain of
ε =
{
σ/E σ < σY
σY/E (σ/σY)1/N else
. (1)
A bi-linear cohesive law as depicted in figure 3is used, whereby the traction t refers to the actualconfiguration. The work of separation Γ0 is related
t
σ
δλδc δc
Ecoh EDcoh
Figure 3: Bi-linear traction-separation law
to the critical crack opening displacement δc and
2

the cohesive strength σ via
Γ0 =
δc∫
0
t dδ =1
2σδc . (2)
The dimensionless shape parameter λ ∈ [0, 1] de-scribes the initiation of softening with respect tothe critical separation δc. The bi-linear relationhas the advantage that despite its simplicity theeffects of the influence of the shape of the cohesivelaw on the predicted crack growth resistance canbe investigated by varying the only dimensionlessshape parameter λ. If not specified otherwise theshape parameter is set to λ = 0.24 which lies inthe region of typical cohesive laws.
The unloading branch in the softening region infigure 3 expresses the irreversible character of thematerial separation process and is quantified by adamage variable
D = 1− EDcoh
Ecoh(3)
as ratio between slope EDcoh of the cohesive law and
its initial value Ecoh.Following the publications of Tvergaard and
Hutchinson (1992, 1994, 1996) reference values forthe normalization are defined as
K0 =√
E′Γ0 , R0 =1
3π
(
K0
σY
)2
. (4)
Thereby the term E′ = E/(1 − ν2) abbreviatesYoung’s modulus under plane strain conditions.The value K0 is the fracture toughness of the co-hesive model within a purely elastic material andthe length R0 scales with the size of the plasticzone. The intrinsic length contained within theinitial slope Ecoh of cohesive law is described by
Rinit =E′
2Ecoh. (5)
The factor two is incorporated for convenience asthe results in section 4 show.
Although dynamic simulations are performedthe loading has to be applied quasi-statically en-suring that the crack propagation and arrest dur-ing pop-in are not influenced by changes of themagnitude of loading. Consequently, the time elas-tic waves need to pass characteristic distances ofthe problem has to be small compared to the time
scale of loading τL = KmaxI /KI . This applies espe-
cially to the slower shear waves which propagatewith speed cs requiring
R0
cs≪ τL . (6)
2.2. Measure of Crack Extension
In classical fracture mechanics, the crack tip is as-sumed as ideally sharp, so that the crack lengthis defined uniquely. However, this is not the casefor the employed cohesive zone model where thesoftening region has a finite extension.
In the present study the crack tip is defined ascenter of the softening zone, whereby the damagevariable D is chosen as weight as depicted schemat-ically in figure 4a. Thus, the increase of the cracklength is computed as
∆a =
∞∫
0
D dx . (7)
Thereby, without loss of generality it is assumedthat the crack propagates along the positive x-direction starting at x = 0. If a secondary crackoccurs, the smeared definition (7) incorporates theextension of the secondary crack as sketched infigure 4b. In any case, the results obtained withdifferent possible definitions of crack growth differconsiderably only in the stadium of crack initia-tions. Besides, definition (7) has the advantage tobe defined as well for cohesive laws approachingthe traction-free state only asymptotically.
3. Numerical Implementation
3.1. FE-Model
The described boundary value problem is solvedwith the commercial FE-code Abaqus. A bound-ary layer of radius A0 is spatially discretized witha mesh as shown in figure 5. The radius is chosenwith A0 = 30 (Kmax
I /K0)2R0 whereby Kmax
I de-notes the maximum loading. In order to avoid vol-umetric locking in the plastic zone and for perfor-mance reasons quadrilateral elements with bilinearshape functions and reduced integration1 are used.
1The default value of the software of an hourglass stiffnessof 0.5% of the largest eigenvalue of the element stiffness
3

D ∆a
1
x
softening region
(a)
D ∆a
1
x
(b)
Figure 4: Smeared measure of crack extension for(a) softening at the primary crack tipand (b) growth of a secondary crack
Due to the symmetry, only one half of the prob-lem needs to be discretized. A region of widthB0 = 6.5R0 is fine-meshed with equilateral ele-ments of edge length ∆. Section 4 is dedicatedto the determination of the necessary mesh resolu-tion.
The cohesive elements available in Abaqus im-plement constitutive laws defined in terms of nom-inal tractions. However, for the present study atrue stress formulation is desired. The employedimplementation is outlined in A.
In section 2.1 it was pointed out that quasi-staticconditions are present if the time stress waves needto pass characteristic distances of the problem isshort compared to the characteristic time scaleof loading. For the introduced FE-model of fi-nite extent this applies to the outer radius A0 ofthe model thus imposing the stronger requirementA0/cs ≪ τL.
The following computations are performed withimplicit time integration. In the initial stadiumthe crack propagates stably so that as initial con-dition the nodal velocities are set to zero. Themass density is specified so that values of R0/cs =1/30, 000 τL are obtained. This choice guaranteessufficiently small inertia forces during stable crackpropagation but does not lead to too small time
is employed. For a sample computation fully integrated,hybrid elements were employed instead. The differenceswere negligible.
A0A0
KI
(a)
B0
∆initialcrack tip
(b)
Figure 5: Finite element mesh of (a) whole modeland (b) near the crack tip
increments in the instable region. So the compu-tations require several hundred to a few thousandtime increments each.
3.2. Fracture Mechanical Evaluation
During the dynamic process of pop-in the load-ing of the process zone, expressed by the dynamicstress intensity factor KId, differs from the appliedloading KI . A dimensional analysis for the linear-elastic far-field shows, that the interrelationshipbetween both values can only have the structure
KId = k (∆a/c, ν) KI . (8)
Thereby it was taken into account, that for thequasi-static loading under consideration the prob-lem cannot depend on time explicitly. The con-necting factor k (∆a/c, ν) is termed the universal
function of crack tip speed. The strictly monotonicfunction k (∆a) equals unity for ∆a = 0 and van-ishes at Rayleigh speed ∆a = cR. During crackpropagation the crack tip loading KId corresponds
4

to the crack growth resistance:
KR = KId . (9)
As the crack growth ∆a(t) has to be determinedanyway and the loading KI is known, equation (8)allows to extract the current resistance KR com-fortably. The smeared crack length definition (7)leads to smooth ∆a(t) curves that can be reliablydifferentiated numerically. In oder to shorten thecomplicated analytical expression, Freund (1989)proposed the approximation
k (∆a) ≈ 1−∆a/cR√
1−∆a/cs(10)
which is used in the following.
4. Necessary Mesh Resolution
First of all, the admissible element size for an ac-curate solution of the boundary value problem de-clared in section 2.1 has to be determined. Es-pecially the point of damage initiation within thecohesive zone, i.e. when the maximum stress σmax
ϕϕ
normal to the crack plane in the ligament reachesthe cohesive strength σ for the first time, needs tobe resolved. For these considerations the softeningbehavior of the traction-separation law does notneed to be taken into account. This can be ac-complished by choosing a cohesive strength largerthan the maximum ligament stress σmax
bl of the cor-responding blunting solution. The latter has beeninvestigated extensively (e.g. Rice, 1968; Rice andJohnson, 1970; McMeeking, 1977) yielding maxi-mum stresses of σmax
bl = 3 . . . 5σY depending onthe hardening properties. As no instable crackpropagation occurs without softening inertia neednot be taken into account for this investigation.
Under these circumstances the only intrinsiclength is contained within the initial slope of thecohesive law as defined in equation (5). Dimen-sional considerations allow to specify the func-tional interrelationship
σmaxϕϕ
σY= f
(
KI
σY√Rinit
,E
σY, N, ν
)
(11)
for the maximum ligament stress σmaxϕϕ .
The two limit cases for small respectively largedimensionless loading KI/
(
σY√Rinit
)
can be iden-tified. For small stress intensity factors the bulk
material remains elastic. As the whole problem islinear then the maximum stress is proportional toKI and occurs at the crack tip. Under these condi-tions the energy release rate of the elastic far-fieldequals the cohesive work at the crack tip leadingto the maximum ligament stress of
σmaxϕϕ =
KI√Rinit
. (12)
For large loadings KI/(
σY√Rinit
)
→ ∞ the in-trinsic length becomes negligibly small comparedto the size of the plastic zone so that the sketchedproblem approaches the blunting solution asymp-totically. Thus, in the intermediate range betweenthese two limit cases for increasing loading the lo-cation of maximum stress moves from the crack tiptowards a position in front of the tip.
0
1
2
3
4
0 1 2 3
σϕϕ/σY
x/(J/σY)
KI = (2.0,2.9, 3.3, 4.2,
6.4, 10.3, 15.2) σY
√
Rinit
Figure 6: Transition from the elastic to the blunt-ing solution: normal stresses σϕϕ in theligament for a linear cohesive law (N =0.1, ν = 0.3, ∆ = 0.125σY/E Rinit)
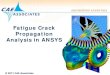
The evolution of the stresses in the ligamentwith the loading for the linear cohesive law hasbeen investigated numerically by means of thedescribed finite element model. Within the finemeshed region around the crack tip an elementsize of ∆ = 0.125σY/E Rinit is used. The normalstresses σϕϕ in the ligament are plotted in figure 6for a set of parameters and show the transitionfrom the linear to the blunting solution.
The increase of the maximum stress σmaxϕϕ in
the ligament with the loading in the dimensionlessform (11) is depicted in figure 7. The diagram alsoincorporates the linear solution (12) and the cor-responding blunting solution σmax
bl as asymptote.The loading point when the maximum stress σmax
ϕϕ
5

departs from the crack tip to a local maximum infront of it for the first time is marked by ×.
0
1
2
3
4
0 10
σmax
ϕϕ
/σY
KI/(σY
√Rinit)
E = (333, 500, 750, 1000) σY
linearsolution
McMeeking (1977), E = 333 σY
Figure 7: Maximum stress σmaxϕϕ in the ligament for
a linear cohesive law as function of di-mensionless loading (marked by ×: σmax
ϕϕ
as local maximum in front of crack tipfor the first time; N = 0.1, ν = 0.3,∆ = 0.125σY/E Rinit)
As figure 7 shows the stress σmaxϕϕ has a value
of about σmaxϕϕ ≈ 70% . . . 80%σmax
bl when the max-imum occurs in front of the crack tip for the firsttime. In this range the solution hardly differs fromthe linear one (12). In the dimensionless formthe corresponding load KI is only slightly higherand thus amounts to about KI/
(
σY√Rinit
)
≈σmaxbl /σY. The position xmax of the maximum
stress scales with J/σY. Hence, in the transi-tion region the mesh needs to be fine enough toresolve local fields changing within a distance ofJ/σY = K2
I /(E′σY) so that the element size has
to be chosen with
∆ ≪(
σmaxbl
σY
)2 σYE′
Rinit . (13)
For the bi-linear cohesive law this can be rear-ranged to
∆ ≪ 0.5σ
σYλδc . (14)
Thereby, it was taken into account that the max-imum stress σmax
ϕϕ equals the cohesive strength σat the transition point. Consequently, in the tran-sition region the elements need to be considerablysmaller than the critical cohesive opening δc. How-ever, as figure 7 shows the loads to reach higherligament stresses after the transition rapidly in-crease and so does the position of the maximum
stress. Thus, for higher cohesive strengths the re-quirements to the mesh resolution are less strict.This applies also to the linear and nearly linearrange below the transition point where the stressesaround the crack tip vary over distances scalingwith Rinit only.
Since the whole parameter range including thetransition region is to be investigated, an elementsize ∆ = 0.2 δc is used for the following computa-tions which turned out to be an appropriate choice.
5. Results
5.1. Crack Growth Resistance Curves
A typical computed crack growth resistance curveis depicted in figure 8. It shows an oscillatory
0
1
2
3
0 1 2 3 4 5 6
K/K
0
∆a/R0
KI , ∆ = 0.2 δcKR, ∆ = 0.2 δcKR, ∆ = 10 δc
Figure 8: Snap-through in crack growth resistancecurve (σ/σY = 3.6, E/σY = 333, N =0.1, ν = 0.3, λ = 0.24)
behavior, i.e. after the dynamic propagation thecrack arrests and further loading is necessary inorder to drive the crack again. The coarse meshwith ∆ = 10 δc does not resolve the local instabil-ities and the steep initial tearing, thus confirmingthe considerations in section 4.
In principle, it would be possible that the crackarrest is induced by waves reflected at the arti-ficially introduced boundary at radius A0. Thecrack tip velocity ∆a during instable crack propa-gation is plotted in figure 9 and indicates a crackarrest after about 0.0004 τL. This span is shortcompared to the time A0/c ≈ 0.0025 τL the fasterlongitudinal elastic waves of speed c need to reachthe boundary. Consequently, the crack arrest is in-herent to the problem. The reflections only cause
6

the small disturbance during the forth crack arrestin the curve for the fine mesh in figure 8.
0
0.1
0.2
0.3
0.4
0 0.0002 0.0004
∆a/c R
∆t/τL
dynamic crack propagation
Figure 9: Crack tip velocity during first instablepropagation (E/σY = 333, N = 0.1, ν =0.3, σ/σY = 3.6, λ = 0.24, ∆ = 0.2 δc)
The evolution of the damage variable D in theligament as depicted in figure 10 shows, that thepop-in occurs when the first point becomes com-pletely damaged. However, this point does not lie
at the crack tip but in front of it. When in this
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5
D
x/R0
KI
K0
= (0.96, 1.34, 1.54,
1.79, 1.87, 1.89, 1.90)
Figure 10: Damage evolution in the ligament be-fore the first pop-in (σ/σY = 3.6,E/σY = 333, N = 0.1, ν = 0.3,λ = 0.24, ∆ = 0.2 δc)
region the cohesive zone completely has lost itsstress-carrying capacity it forms a secondary crack.The latter shields the plastic zone of the main cracktip leading to elastic unloading within this region.The missing contribution of this zone to the plas-tic dissipation results in decreasing crack growth
resistance. Subsequently, the secondary crack tipbegins to blunt inducing the same behavior in frontof its own tip. The work required for the plastic de-formation of the formed crack tip is responsible forthe anew increasing crack growth resistance. Thismechanism repeats. The residual plastic strains inthe wake behind the current crack tip as depictedin figure 11 attest to the periodic behavior.
However, after the formation of the secondarycrack the next local instability occurred alreadybefore a further crack was induced. Apparently,partly softening in front of the secondary crack tipand unloading of the surrounding material is suf-ficient for a locally decreasing crack growth resis-tance. Nevertheless, the plastically deformed lig-ament between primary and secondary crack, theso-called stretch zone, persists until several periodsof the mechanism have been passed.
0.01
0.018
0.03
0.056
R0
initial crack tip
Figure 11: Equivalent plastic strain in the wakebehind the current crack tip (depictedwith respect to the reference configura-tion; E/σY = 333, N = 0.1, ν = 0.3,σ/σY = 3.6, λ = 0.24, ∆ = 0.2 δc)
In the following the influence of several param-eters is investigated.
5.2. Influence of the Shape of theCohesive Law
First of all, the shape parameter λ is varied. Thecrack growth resistance curves obtained for differ-ent values are depicted in figure 12 and show astrong dependence. So the periodicity ∆ainstab ofthe instability as well as its amplitude decreasewith increasing λ. Additionally, larger values of λcause a delayed damage initiation, i.e. a highervalue at the intersection with the ordinate axisin figure 12. This has the consequence that forhigh values of the shape parameter the first pop-
7

in occurs already at the load level of the steady-state toughness Kss
R . Referring to Tvergaard andHutchinson (2008) the latter is defined as maxi-mum value of the crack growth resistance curve.In contrast, for low values of λ the load can befurther increased after the first crack arrest.
0
1
2
0 1 2
KR/K
0
∆a/R0
λ = 0.12λ = 0.24λ = 0.72λ = 0.89
Figure 12: Crack growth resistance curves for dif-ferent values of the cohesive shape pa-rameter λ (σ/σY = 3.6, E/σY = 333,N = 0.1, ν = 0.3, ∆ = 0.2 δc)
Figure 13a shows that the steady-state tough-ness Kss
R is only moderately influenced by theshape parameter. Conversely, the effect of λ on∆ainstab is almost independent of the cohesivestrength σ as figure 13b indicates. In addition,the period ∆ainstab tends to zero if the value of λis increased towards unity.
The reason for the dependency of the period∆ainstab on the shape parameter λ is that a highervalue of λ means that the softening region of thetraction-separation relation becomes steeper in fa-vor of a smaller initial slope. But the faster the co-hesive zone softens the faster the damaging regionin front of the crack tip forms a secondary crackand unloading zones that shield its predecessor.
5.3. Influence of the Cohesive Strength
In the following the cohesive strength σ is variedrelative to the initial yield stress σY. The result-ing crack growth resistance curves are depicted infigure 14. As expected, the steady-state fracturetoughness Kss
R increases with higher ratios σ/σY.The figure shows, that intermediate instabilitiescan be observed as soon as the plastic contribu-tion to the crack growth resistance exceeds about
0
1
2
0 1
Kss
R/K
0
λ
σ = 3.6 σY
σ = 3.4 σY
(a)
0
1
0 1
∆ainstab/R
0
λ
σ = 3.6 σY
σ = 3.4 σY
(b)
Figure 13: (a) Steady-state fracture toughness KssR
and (b) periodicity ∆ainstab as functionof the shape parameter λ (E/σY = 333,N = 0.1, ν = 0.3, ∆ = 0.2 δc)
20 to 30%.
6. Discussion
The present study dealt with the simulation ofmode I crack growth using a bi-linear cohesive zonemodel under small-scale yielding conditions. It wasfound that for several parameter sets local insta-bilities occur, the so-called pop-ins. The resultsindicate that softening in front of the crack tip isresponsible for pop-ins. For a cohesive law withlinear initial region the binary information whetherdamage initiates at or in front of the crack tip de-pends on the cohesive strength and the propertiesof the bulk material only but for dimensional rea-sons not on the value of the initial slope (see sec-tion 4). Thus, it stands to reason, that under smallscale yielding a pop-in mechanism is predicted byall cohesive zone models with linear initial rangeand an immediately following softening, if the co-hesive strength lies sufficiently close to the maxi-mum stress of the corresponding blunting solution.
It was found that the necessary element size inorder to resolve the damage initiation scales with
8

0
1
2
3
0 1 2 3
KR/K
0
∆a/R0
σ/σY = 3.0σ/σY = 3.3
σ/σY = 3.5σ/σY = 3.7
Figure 14: Equilibrium crack growth resistancecurves for different cohesive strengths(E/σY = 333, N = 0.1, ν = 0.3,∆ = 0.2 δc)
the width of the linear initial region of the cohesivelaw. Presumably, the same restriction applies tothe softening range which controls the formationof secondary cracks.
Parameter studies have shown, that in contrastto the fracture toughness the crack jump widthduring pop-in and the possible further loading ca-pacity is considerably influenced by the shape pa-rameter of the cohesive law. Hence, the lattershould be fitted to experiments addressing thesematerial properties.
The fact that all numerical simulations havebeen performed with homogeneous material prop-erties implies that local brittle zones are not in-evitably necessary for pop-ins. Rather, this phe-nomenon is determined by the mean material prop-erties as well. However, in the simulations the pop-ins appeared only in that range where the steady-state toughness strongly depends on the cohesivestrength. This is in accordance with the exper-imental observations that already small fluctua-tions of the local strength lead to significant scatterof the loads at which pop-ins occur.
In the following the results of the present studyare compared to those reported in the literature.Simulations of crack propagation with a cohesivezone model under small-scale yielding have beenperformed by a number of authors (Tvergaardand Hutchinson, 1992, 2008; Tvergaard, 2010; Linand Cornec, 1996; Lin, 1996; Wei and Hutchinson,1997; Niordson, 2001). For static simulations using
a tri-linear cohesive law with wide plateau, Tver-gaard and Hutchinson (Tvergaard and Hutchin-son, 1992, 2008; Tvergaard, 2010) observed an in-stable point, i.e. a local maximum in the R-curves, for some parameter sets. However, behindthis point they found an asymptotically decreas-ing crack growth resistance without further localmaxima. In the present study the limit case ofquasi-static loading is considered so that an influ-ence of the mass density on the computed R-curvesis excluded. Hence, the results should be com-parable to those of Tvergaard and Hutchinson inprinciple. Possibly, the cohesive law employed bythese authors leads to less pronounced instabilities.For their investigations Tvergaard and Hutchinsonused an element size of ∆ = 10 δc within the pro-cess zone. Figure 8 shows, that with this mesh res-olution the present model exhibits a similar asymp-totic behavior. Lin and Cornec (Lin and Cornec,1996; Lin, 1996) simulated the crack growth only“until the applied K ... almost ceases to increase”.
Wei and Hutchinson (1997) as well as Niord-son (2001) investigated the same problem but em-ployed an Eulerian-type approach to compute thesteady-state fracture toughness directly. However,by excluding the non-stationary terms a priori theywould not have been able to resolve possible insta-bilities.
Performing dynamic simulations under large-scale yielding with a cohesive law of exponentialtype Siegmund and Needleman (1997) substanti-ated a crack arrest independent of wave reflections.As in the present study these authors observed lo-cally instable crack propagation already for mod-erate plastic contributions to the crack growth re-sistance.
In figure 15 the computed steady-state fracturetoughness values are plotted in comparison withdata from literature. In addition to the curve forthe cohesive law with a wide plateau (marked byN in the figure), Tvergaard and Hutchinson (1992)published the steady-state toughnesses obtainedwith a cohesive law with narrower plateau and aslightly refined mesh (marked by H in the figure).Especially the latter is in good accordance with theresults of the present study. Only the data of Linand Cornec (1996) differ considerably. Figure 15indicates a trend towards higher toughness valuesfor more compact cohesive laws, i.e. those with awider plateau. All curves exhibit the asymptoticbehavior discussed by Tvergaard and Hutchinson
9

1
2
3
4
2 3 4
Kss
R/K
0
σ/σY
λ = 0.24 (∆ = 0.2 δc)σmax
bl(McMeeking, 1977)
Lin and Cornec (1996) (∆ = 0.5 σ/σY δc)
Tvergaard and Hutchinson (1992)(N: ∆ = 10 δc, H: ∆ = 8 δc)
Figure 15: Steady-state toughness KssR in comparison with data from literature (E/σY = 333, N = 0.1,
ν = 0.3)
that the toughness becomes arbitrarily large if thecohesive strength σ approaches the maximum lig-ament stress σmax
bl of the associated blunting so-lution resulting in a high sensitivity within thisregion.
If the employed model is used to describe theductile-brittle transition of an engineering metalthe cohesive zone represents the cleavage mech-anism. In this context the term ductile is cov-ered by the model in the sense of a relevant plas-tic contribution of the matrix material to thecrack growth resistance. For the experiments ofNeimitz, Galkiewicz, and Dzioba cited in the in-troduction in the corresponding temperature re-gion the values of the lower shelf toughness andyield stress are K0 = 25 . . . 35MPam0.5 and σY =300 . . . 400MPa (Dzioba et al., 2010) so that thereference length amounts to R0 = 0.4 . . . 1.4mm.In the simulations the extension of the stretch zoneat formation of a secondary crack lies in the rangeof several to some ten percent of R0 depending onthe value of the shape parameter. This is in accor-dance with the micrograph depicted in figure 2.
Acknowledgments
The financial support of this investigation by theDeutsche Forschungsgemeinschaft (German Sci-ence Foundation) under contract KU 929/14-1 isgratefully acknowledged. The authors thank the
student Mr. A. Burgold for his great commit-ment in generating the finite element meshes forthe present study.
References
Abaqus, 2009. Abaqus Theory Manual v6.9.ABAQUS, Inc. and Dassault Systèmes.
ASTM E1290-08ε1, 2008. Standard Test Methodfor Crack-Tip Opening Displacement (CTOD)Fracture Toughness Measurement.
Brocks, W., Cornec, A., Scheider, I., 2003. Compu-tational aspects of nonlinear fracture mechanics.In: Comprehensive Structural Integrity. Vol. 3.Elsevier, pp. 127–209.
Dzioba, I., Gajewski, M., Neimitz, A., 2010. Stud-ies of fracture processes in Cr-Mo-V ferritic steelwith various types of microstructures. Int. J.Pres. Ves. Pip. 87 (10), 575–586.
Firrao, D., Doglione, R., Ilia, E., 1993. Thicknessconstraint loss by delamination and pop-in be-havior. In: Hackett, E. M., Schwalbe, K., Dodds,R. (Eds.), Constraint Effects on Fracture. No.1171 in ASTM STP. pp. 289–305.
Freund, L. B., 1989. Dynamic Fracture Mechanics.Cambridge University Press.
10

Gao, X., Shih, C., Tvergaard, V., Needleman, A.,1996. Constraint effects on the ductile-brittletransition in small scale yielding. J. Mech. Phys.Solids. 44 (8), 1255–1282.
Kabir, R., Cornec, A., Brocks, W., 2007. Simula-tion of quasi-brittle fracture of lamellar γTiAlusing the cohesive model and a stochastic ap-proach. Comp. Mater. Sci. 39 (1), 75–84.
Kobayashi, T., Yamada, S., 1994. Evaluation ofstatic and dynamic fracture toughness in ductilecast iron. Metall. Mater. Trans. A. 25 (11), 2427– 2437.
Li, W., Siegmund, T., 2004. An analysis of the in-dentation test to determine the interface tough-ness in a weakly bonded thin film coating - sub-strate system. Acta. Mater. 52 (10), 2989–2999.
Lin, G., 1996. Numerical investigation of crackgrowth behavior using a cohesive zone model.Dissertation, TU Hamburg-Haburg.
Lin, G., Cornec, A., 1996. Characteristics of crackresistance: Simulation with a new cohesivemodel. Mat.-wiss. u. Werkstofftech. 27 (5), 252–258, in German; results in part also publishedby Brocks et al. (2003).
Lin, G., Kim, Y.-J., Cornec, A., Schwalbe, K. H.,1997. Fracture toughness of a constrained metallayer. Comp. Mater. Sci. 9 (1–2), 36–47.
Lin, G., Meng, X.-G., Cornec, A., Schwalbe, K.-H., 1999. The effect of strength mis-match onmechanical performance of weld joints. Int. J.Fracture. 96 (1), 37–54.
McMeeking, R. M., 1977. Finite deformation anal-ysis of crack-tip opening in elastic-plastic ma-terials and implications for fracture. J. Mech.Phys. Solids. 25 (5), 357–381.
Needleman, A., Tvergaard, V., 2000. Numericalmodeling of the ductile-brittle transition. Int. J.Fracture. 101 (1), 73–97.
Neimitz, A., Galkiewicz, J., Dzioba, I., 2010. Theductile-to-cleavage transition in ferritic Cr-Mo-V steel: A detailed microscopic and numericalanalysis. Eng. Fract. Mech. 77 (13), 2504–2526.
Niordson, C. F., 2001. Analysis of steady-stateductile crack growth along a laser weld. Int. J.Fracture. 111 (1), 53–69.
Rice, J. R., 1968. A path independent integral andthe approximate analysis of strain concentrationby notches and cracks. J. Appl. Mech. 35 (2),379–386.
Rice, J. R., Johnson, M. A., 1970. The role of largecrack tip geometry changes in plane strain frac-ture. In: Kanninen, M. F. (Ed.), Inelastic Be-havior of Solids. McGraw-Hill, New York, pp.641–672.
Ripling, E., Mulherin, J., Crosley, P., 1982. Crackarrest toughness of two high strength steels(AISI 4140 and AISI 4340). Metall. Mater.Trans. A. 13 (4), 657–664.
Siegmund, T., Brocks, W., 2000. Modeling crackgrowth in thin sheet aluminum alloys. In: Hal-ford, G. R., Gallagher, J. P. (Eds.), Fatigue andFracture Mechanics: 31st Volume. No. 1389 inASTM STP. pp. 475–485.
Siegmund, T., Needleman, A., 1997. A numeri-cal study of dynamic crack growth in elastic-viscoplastic solids. Int. J. Solids. Struct. 34 (7),769–787.
Singh, U., Banerjee, S., 1991. On the origin of pop-in crack extension. Acta. Metall. Mater. 39 (6),1073–1084.
Smith, L. K., 1988. Macrocrack-multiple defectinteraction considering elastic, plastic and vis-coplastic effects. Masterthesis, Faculty of theSchool of Engineering, Air Force Institute ofTechnology.
Srinivas, M., Malakondaiah, G., Rama Rao, P.,1989. On ‘apparent pop-in’ during ductile frac-ture toughness testing being related to the yield-point phenomenon in armco iron. Scripta. Met-all. Mater. 23 (9), 1627–1632.
Sumpter, J. D. G., 1991a. Pop-in and crack arrestin an HY80 weld. Fatigue. Fract. Eng. M. 14 (5),565–578.
Sumpter, J. D. G., 1991b. Pop-in fracture: obser-vations on load drop, displacement increase, andcrack advance. Int. J. Fracture. 49 (3), 203–218.
Tomokazu, M., Yasufumi, I., 1977. Pop-in behav-ior induced by interaction of cracks. Eng. Fract.Mech. 9 (1), 17–24.
11

Tvergaard, V., 2010. Effect of pure mode I, II orIII loading or mode mixity on crack growth in ahomogeneous solid. Int. J. Solids. Struct. 47 (11-12), 1611–1617.
Tvergaard, V., Hutchinson, J. W., 1992. The rela-tion between crack growth resistance and frac-ture process parameters in elastic-plastic solids.J. Mech. Phys. Solids. 40 (6), 1377–1397.
Tvergaard, V., Hutchinson, J. W., 1994. Effect ofT-stress on mode I crack growth resistance in aductile solid. Int. J. Solids. Struct. 31 (6), 823–833.
Tvergaard, V., Hutchinson, J. W., 1996. Effect ofstrain-dependent cohesive zone model on predic-tions of crack growth resistance. Int. J. Solids.Struct. 33 (20-22), 3297–3308.
Tvergaard, V., Hutchinson, J. W., 2008. Mode IIIeffects on interface delamination. J. Mech. Phys.Solids. 56 (1), 215–229.
Tvergaard, V., Needleman, A., 1993. An analysisof the brittle-ductile transition in dynamic crackgrowth. Int. J. Fracture. 59 (1), 53–67.
Wei, Y., Hutchinson, J. W., 1997. Steady-statecrack growth and work of fracture for solids char-acterized by strain gradient plasticity. J. Mech.Phys. Solids. 45 (8), 1253–1273.
A. Cohesive Elements
The cohesive zone is implemented by linear ele-ments which include a priori the symmetry condi-tion as depicted in figure 16. The according shape
w
Xu1
u2
Figure 16: Linear cohesive element for symmetricseparation
functions are
N1(x0) =1
2(1 + η) , N2(x0) =
1
2(1− η) , η =
2x0w0
.
(15)
Here and in the following the subscript ( )0 refersto the value of a property with respect to the refer-ence configuration. For a single integration pointthe contribution of a single element to the nodalforces of both nodes is equal and takes the value
P y1 = P y
2 =1
2wt with t = t (2um,D) . (16)
The traction t depends on twice the mid-point dis-placement um = 1/2 (u1 + u2) from the symmetryline and internal variables as the damage D in thepresent case,
Such cohesive elements can be implemented bymodifying a standard element so that it con-tributes the same nodal forces (16) under all possi-ble load histories. For this task, four-noded quadri-laterals with reduced integration as shown in fig-ure 17 come into operation. First of all, sym-
1
2
3
4
h0
w0
x
y
u1y
−u3y
integration point
Figure 17: Four-noded quadrilateral with reducedintegration under symmetric deforma-tion
metric element deformations, i.e. uix = ui+2x and
uiy = −ui+2y for i = 1, 2, are enforced in order to en-
sure that the integration points remain at the sym-metry plane. Under these constraints, the shapefunctions of the two remaining nodes i = 1, 2 forthe x- respective y-displacements are
Nxi (x0, y0) = Ni(x0) and Ny
i (x0, y0) =2y0h0
Ni(x0) .
(17)The corresponding contributions to the nodal
12

forces have the value
P xi = whd
[
σxx∂Nx
i
∂x+ σxy
∂Nyi
∂y
]
IP
= dhσxx
(18)
P yi = whd
[
σxy∂Ny
i
∂x+ σyy
∂Nyi
∂y
]
IP
= dwσyy
(19)
The brackets have to be evaluated at the integra-tion point so that the terms connected to shearstresses vanish. Furthermore, d denotes the out-of-plane thickness of the element and h = h0 + umthe intermediate height in the actual configuration.
Comparing equations (16) and (19) shows thatif the thickness of the plane element is chosen withd = 1/2 (with respect to unit thickness of the re-maining model), the stress σyy can be identifiedas the cohesive traction t. The horizontal nodalforces P x
i need to vanish.In order to obtain the desired traction-
separation law, the Hashin-constitutive law, anorthotropic effective stress-type damage modeloriginally intended for fiber-reinforced composites(Abaqus, 2009) is utilized. The material axes arealigned with the direction of cohesive separationand the Poisson-numbers are set to zero. Un-der the applied constraints the principal axes ofloading cannot rotate, so that the hypoelastic for-mulation can be integrated to
t = (1−D)Eelemy log
(
1 +umh0
)
. (20)
Here and in the following the superscript ( )elem
denotes equivalent properties of the cohesive el-ements (which have no physical meaning). Acomparison of (20) with the desired traction-separation law implies two measures. Firstly, theelement height needs to be chosen with h0 ≫ δcsuch that log (1 + um/h0) ≈ um/h0. Secondly, thisallows to identify the Young’s modulus in direc-tion of separation Eelem
y of the cohesive element
as Eelemy /h0 = Ecoh. In the computations, val-
ues h0/δc = 50 are used. In addition, it has tobe ensured that the horizontal nodal forces (18)vanish. A Young’s modulus Eelem
x equal to zerowould be no problem in principal but is excludedby the input preprocessor of Abaqus. For all com-putations, a value of Eelem
x h = 10−9 ER0 is used.Possible couplings due to out-of-plane constraintsare avoided by using plane stress elements.
The last aspect is concerned with the dam-age evolution law. The utilized Hashin-damagemodel originally is intended for a spatially con-tinuous description. Abaqus regularizes the so-lution by introducing mesh dependent softening.For this purpose the program calculates a charac-teristic length Lelem from the element dimensions.In the case of the considered rectangular elementswith width w0 and height h0 and reduced integra-tion, this quantity takes the value Lelem =
√h0w0.
Abaqus calculates the dissipated work of failureunder the stress-strain curve as Γε = Γelem/Lelem,which is connected to the desired work of separa-tion by the factor element height h0. So the mate-rial property to be handed over to the program isΓelem =
√
w0/h0 Γ0.
13