Upload
edward-elric2
View
12
Download
0
Embed Size (px)
DESCRIPTION
SILUX
Citation preview
silux
The Multi-Body DynamicSimulation Program
Cookbook 2D (English Edition)
www.silux.com
silux ag CH-6317 Zug-Oberwil Switzerland
DOC2121_E
Inverted Pendulum
1
Inverted Pendulum
Introduction
All of us, at one time or another, have tried to balance a ruler or other long thin object on the tip of a nger. From experience, we know that this is relatively easy with long rulers but is difcult for short rulers because the necessary reaction time for balancing short rulers is correspondingly shorter. Try to balance a match!
We want to construct an experimental structure where a rod is balanced on a carriage. The bottom end of the rod should be connected to the carriage, but it should still be able to turn freely without friction around this joint. The carriage stands on a table and is pushed back and forth by a horizontal force so that the rod does not tip over.
The force acting on the carriage should be controlled automatically by a control-system so that the carriage performs the posed tasks. The task will be expanded later on such that the carriage will not only have to balance the rod, but will also have to try to occupy a specic position on the table. In other words, while balancing the rod, the carriage should not drive over the edge of the table but should rather stay in the middle of the table.
We will deal with the following problems in this example:
Drawing raw data Using the numerical tool box Creating objects Creating xed points
Inverted Pendulum
2
Creating links Moving and placing an object Creating a gravity eld Saving a model Changing or modifying the model and the controls
The Carriage
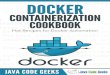
FIGURE 1.
The carriage and its measurements [cm]
The carriage consists essentially of a rectangular mass and, in the two dimensional model, of two wheels. In order to keep things simple at rst, we wont link the two wheels separately and with rotational ability onto the rectangle, but will rather create them at the same time as the rectangle. The rectangle and the two wheels then are a part of the same object. The wheels are in this sense not really wheels because they cant turn. The whole thing works then as if we were pushing a carriage with blocked wheels across a table. This doesnt make any difference because we wont take friction into account at the beginning anyway.
The rod that were going to balance will be placed on and connected to the top of the carriage with a regular link later on. We manage to produce the table by xing a rectangular mass in space with two links. Finally well put the carriage with the pendulum on top of it.
Inverted Pendulum
3
A. Rectangular Carriage Body
1.
Choose the symbol for drawing a rectangle in the Drawing Tool box.
2.
Draw a rectangle (10, 15) by (20, 12.5).
B. Wheels
3.
Choose the symbol for drawing a circle in the Drawing Tool box.
4.
Additionally, choose the Free Centered drawing method.
We want to draw the circle by placing the mouse in the center of the circle and then pulling the circle out from there radially.
5.
Place the circle (the mouse) at (12, 12.5) and move the mouse (with the mouse-button pushed down) horizontally to the right to the coordinates (13, 12.5). You can let go of the mouse-button there.
C. Positioning the Wheels and Changing the Radius.
The wheel is now exactly where we want it. We will correct the position and the radius of the wheel with the Numerical Tool Box.
6.
Select the center of the circle.
The circle data will now be shown in the Numerical Tool box. You can see that the upper-most eld in the Numerical Tool box is highlighted in black and is therefore ready to be written over.
7.
Enter the value (11.5) with the keyboard and hit Return.
The position of the circle has shifted horizontally to the value that you entered. At the same time, the next eld in the Numerical Tool box is activated.
8.
Enter the value (13) through the keyboard and hit Return.
The position of the circle has shifted vertically to the coordinates you specied.
9.
Enter the value (1) and hit Return.
The radius of the circle has changed to the value that you entered. You can now change the other wheel in exactly the same way. You can also just duplicate the rst wheel.
Inverted Pendulum
4
D. Duplicating a Wheel
10.
Select the wheel by clicking with the mouse somewhere on the periphery of the wheel.
The circle will be highlighted with four small black markings.
11.
Choose the command duplicate in the menu.
You can grab the resulting circle with the mouse and drag it to its place. You can do this more exactly though by using the Numerical Tool box.
12.
Click with the mouse in the center of the new circle.
13.
Enter the value (18.5) through the keyboard and hit Return.
14.
Enter the value (13) through the keyboard and hit Return.
E. Pendulum Support
15.
Choose the element curve from the Drawing Tool Box.
16.
Place the circle (the mouse) at the coordinates (15, 15.5) and draw a small curve from (15.5, 16) to (14.5, 16).
We want to draw short lines from both ends of the curve down to the rectangle. We want to draw both lines seamlessly as a continuation of the curve.
17.
Select the left-hand curve end with the mouse.
If you have done this correctly, you should see a single black marking exactly at the end of the curve where we pressed the mouse button.
18.
Choose the line element in the Drawing Tool.
19.
Choose the drawing method
endpoint.
20.
Press the mouse-button down at (13.5, 15) and let go when you have this point directly under the cursor-cross.
21.
Repeat steps 17-20 to draw the short stretch from the right-hand side of the curve.
F. Changing the Raw Data of the Carriage into an Object
Everything that we have drawn up to now should be selected. Instead of selecting all elements individually, use the selection rectangle.
Inverted Pendulum
5
22.
Select the selection rectangle from the Drawing Tool Box. It is the button with the sketched rectangle directly under the arrow button.
23.
Enclose all areas of the carriage with the selection rectangle by pressing in the mouse button at the upper left at (8, 17) and letting it go again at (22, 10).
All parts will be shown with black markings.
24.
Choose the function Create Object from the menu.
The Create Object Dialog box will now be opened. All selected parts will be shown graphically in the upper-left area of the dialog box. We can now tell the system which functions and which mass-contribution the individual parts of the carriage should have.
25.
Select the rectangular carriage body in the Graphics dialog box by typing it in.
26.
Choose the value Pos. Element from the Mass contribution pop-up menu that appears in the upper-right of the dialog box.
You can see that the center of gravity is now shown in the Graphics dialog box.
27.
Select the left wheel in the Graphics dialog box.
28.
Choose the value functional from the pop-up menu Functionality in the upper-right of the dialog box.
You can see that the wheel has changed color from gray to black in the Graphics dialog box.
29.
Do the same for the right wheel (select functional)
Finally, we want to assign the carriage the material aluminum and give it a name.
30.
Select aluminum (Al) from the Simple Material pop-up menu.
When you let go, youll see that new values have been automatically set anew or newly calculated (density, mass, moment of inertia).
Inverted Pendulum
6
31.
In the eld Name, type carriage and hit the return key.
This is all that we have to do in this dialog box for the moment. Note that the three pop-up menus to the upper-right of the dialog box are the three most important functions of this dialog box.
We have declared only the rectangle as a positive element. Therefore only the rectangle has a mass. The wheels are mass-less. On the other hand, we have declared only the wheels as functional. Only the wheels of the carriage then take part in collision control (with the table).
We have left the support over the rectangle as it was. A neutral, decorative part that is just meant to represent a form in a graphic way. An element of beautication! As the open part of a curve, it cannot take part in mass calculations. Nonetheless, this support is a part of the carriage. It moves with the carriage. It is rmly bound to the carriage. It is scenery that is dragged around with the carriage. A dead, cell element, without an inner life. A ngernail.
32.
Click on the OK button.
The carriage is now an object. The rod that we want to draw is a bit higher that what we can currently see on the screen.
33.
Scroll the screen down by pressing on the arrow button of the roll-bar to the upper-right of the window. Click until you see the coordinate 35 in the y-scale.
Rod or Pendulum
G. Stab bzw. Pendel
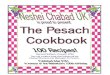
FIGURE 2.
Carriage with pendulum and link
We want to draw a 20 cm long rod that covers the vertical area from y=15 to y=35.
34.
Choose the rectangle in the Drawing Tools dialog box.
35.
Draw a rectangle of (14.5, 35) by (15.5, 15.5).
Inverted Pendulum
7
We also want to change this rod into an object.
36.
Select the rod by clicking on it.
37.
Choose the menu command Create Object.
38.
Select the rod in the Graphics dialog box.
39.
Select the setting positive element from the Mass contribution pop-up menu.
40.
Select functional from the Functionality pop-up menu.
41.
Select Aluminum (AL) from the Simple material pop-up menu.
42.
Enter the phrase rod in the Name eld and hit return.
43.
Hit the OK button.
H. Link (carriage - rod)
We can complete the task by binding the carriage and the rod with a joint. We rst need to show the system where we want this joint by setting a point.
44.
Choose the point from the Drawing Tools dialog box: it is at the top of the third column.
45.
Click with the mouse button in the area of the lower end of the rod to set the raw data point.
Now select the two objects that we want to join and the raw data point. Several objects or elements can be selected by selecting the rst object or element in the normal way and then clicking on all the other objects or elements with a depressed shift button.
46.
Select the carriage, the rod and the raw data point.
47.
Choose the Create Link Normal in the menu "Construction".
I. Saving the Model
Its now time to save the model that you have drawn so far.
48.
Choose the Save menu command.
You will, as usual for a le that hasnt been saved yet, be asked for a le name. You can also change the hard disk or the le (if you have more than one)
Inverted Pendulum
8
Table
Tisch
We need a bit more room to draw the table. The function buttons for changing the scale of the drawing can be found in the upper-right of the model window in the button bar:
100%: Back to the basic setting of 100%. Selection rectangle: Show enlargement of selected area. Arrow button: Enlarge, reduce. Scale: Dialog box for the basic setting of the scale.
FIGURE 3.
Section of the button bar of the Model Window.
49.
Select the lower arrow in the arrow button bar from the button bar.
50.
Move the model horizontally with the arrow button of the roll-bar to the bottom end of the Model Window so that the zero-point lies more or less in the middle of the window and the horizontal area from -25 to +25 is visible on the screen. This is the area that our table, which is 50 cm wide, should take up.
51.
Choose the rectangle from the Drawing Tools.
52.
Draw a rectangle of (-25, 12.5) to (+25, 10).
Change this rectangle into an object by
53.
Selecting the rectangle.
54.
Choosing the menu command Create object.
55.
Selecting the rectangle in the Graphic dialog box as well.
56.
Choosing positive element and functional.
57.
Choosing the material steel.
58.
Entering the phrase table in the Name eld.
59.
Hitting the OK button.
J. Afxing the Table
Later we will turn on a gravity force and so, to keep our table from falling, we have to x it in space now. We do this by linking both ends of the tables surface with xed points.
Inverted Pendulum
9
60.
Choose the point in the Drawing Tools dialog box.
61.
Set a point in the area of the left end of the tables surface.
62.
Select the point youve just drawn.
63.
Choose the menu command Create Fixpoint.
64.
Select the tables surface and the xed point (use the shift button).
65.
Choose the Create Link Normal menu command.
66.
Repeat this procedure for the right-hand end of the table.
Gravity
K. Turning on the Gravity Field
67.
Choose the Set Gravitation (Laboratory) from the Fields menu.
68.
Choose Save, either from the menu (or the command buttonand S).
Important!L. Make a Copy
Before you try the model out for the rst time (set the simulation in action), it is absolutely necessary to make at least one copy. You can do this with the menu command Save as.. or by leaving the program and creating the copy directly in the nder. If you accidentally or purposefully gave a Save command during the simulation, the original state of the model would be lost completely if you hadnt made a copy beforehand. When you save a model then, it is always the current condition that gets saved. The historical process of how the model has come to look like that cannot be represented and so it is necessary to have another copy so that the procedure can be repeated.
M. Intermission
69.
Pause
Inverted Pendulum
10
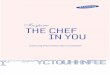
FIGURE 4.
The Carriage on the Table
Simulation
70.
Now you have the model standing in front of you. If you have left the program in one of the proceeding steps, start the program again and load the saved model.
Notice that you can enlarge or reduce the entire model with the two arrows on the arrow button at the upper-right of the model window at any time. You can also move the representation of the model in a specic direction with the roll-bar at any time. The functions will also be available later during the simulation, without having to stop the process to use them.
When you save the model, the last settings of scale and roll-bar position are saved along with the model and are automatically called up with it the next time you load the program.
N. Moving the Carriage
71.
Try to grab the carriage with the mouse and to move it. Place it back on the table.You will notice that the object rod moves along with the object
Inverted Pendulum
11
carriage. In general, the entire chain of linked objects is moved along with any other object linked to that chain (in the case where an object has links).
O. Simulate
72.
Choose run in the menu.
Not much happens immediately after the start of the simulation. It takes a few seconds. But then gradually well see how the rod swings to the side and falls down.
P. Stopping the Simulation
73.
Choose Stop from the menu.
What exactly happened to your model is dependent on where you carriage is. The side that the rod fell on also depends on the specic details of your model like whether the link was set rather to the left of center or rather to the right of center, etc.
If may even be that your carriage drove over the side of the table and crashed down. In this case, close the window (without saving anything!) and re-load the model.
You can try the experiment again with the carriage in a slightly different area of the table.
Q. Changing the Starting Position
We will now go to constructing the control for this experiment. The rod currently has a perpendicular position in relation to the carriage in the saved model. When we want to try the control later, it would not be a very good idea to start the model from this position because not too much will happen. If the control works properly, the rod will, to our eyes, simply remain in that perpendicular position. In itself this is all well and good, but we want to see how the carriage and the control react when we pose a somewhat more difcult task. We would like to see for example, how the control would deal with the situation if we started the model from a position where the rod had a visible slant in regard to the ideal vertical position.
74.
Put the carriage in the middle of the table.
Inverted Pendulum
12
75.
Start the model from the current starting conditions once again and stop the simulation when the rod slants a bit in regard to the perpendicular position.
We have a relatively small angle in mind, about 5 to 10 degrees. You should see the difference between the vertical position and that of the slanted rod clearly.
76.
Save the model by using the menu command Save.
This should be our new starting-position for the model. In any case, we still have a copy of the old starting-conditions of the model.
Control System
R. Controls: First step
We want to be able to change the angle of the rod in the running model during the simulation. We want to have a force act on the carriage that is proportional to this angle and positioned so that it shows which way the rod is falling (left or right). If the rod falls to the left (counterclockwise = positive angle) then the carriage should be accelerated to the left (negative x direction) and if to the right, the reverse. From this it already follows that the proportionality factor is negative.
77.
Choose the command
Create Control System from the Construction Menu.
In the rst round we want to access the input channel X from the simulations system.
Choose from left to right as indicated by the arrow between the blocks in the table. Select then in the following order:
78. X (input)79. Object80. Rod81. Angle82. Value
Inverted Pendulum
13
In words: we have assigned the angle value of the object rod to the input channel X.
In the second round we want to dene what should be calculated and where the output should be directed to. Select in the following order:
83. Output84. Object85. Carriage86. Force87. x
Inverted Pendulum
14
FIGURE 5. Definition of the Control System/First round: Input channel X is the angle of the rod. The name of the control system is 'Carriage Control'.
FIGURE 6. Definition of the Control System/Second Round: Output channel OUTPUT is the force on the carriage. a becomes -10 (m-kg-s system).
Inverted Pendulum
15
In words: we have dened the x components of the force of the carriage as OUTPUT.
So far, we have dened where something comes from and where the results of the calculation should go. Now we need to dene the calculation in the control system itself.
88. Select the rst formula: aX + bY + cZ89. Switch to the m-kg-s unit system.90. Set as the proportionality factor: a = -10.
The formula that we have set with all its values is shown in the lower part of the dialog box. Try to set the relationship between the equation and its meaning with what you see in the dialog box in your mind. Make sure that you carriagery out the entries for the coefcients a, b, c and also the minimum and maximum values of the unit system that is set in the upper right of the dialog box.
The choice of the value a = -10 for the coefcient a comes from the following thought process: If the rod tips by 0.1 (rad), then a force of about 1.0 N should be applied to right it. For this reason a = -10 is set because
F = a * ANG (EQ 1)
1.0 [N] = -10.0 * 0.1 [rad] (EQ 2)
Notice that we can use the formula "aX + bY +cZ", even though we wouldn't call on the entire capacity of the formula. We are not using the input channels Y or Z and so the coefcients b and c remain at zero. In this formula we only use the rst term.
91. Give this control system the name "Car Control".92. Click on the OK button.93. Save the most recent condition of the model with the menu
command 'Save'.
Maybe you'd even like to make a new copy? In this case re-use
94. Save As...or duplicate the model le in the Finder.
Inverted Pendulum
16
S. Simulate 95. Activate the menu command Run.
We can see how the carriage is moved back and forth and how the rod balances.
T. Intermission 96. Pause
You are free to try out different values for the constant a. If the constant becomes smaller, the movements of the carriage will become larger, that is, will require more space. If on the other hand a becomes too big then the force effects on the auto become so strong that under certain circumstances it can begin to jump. In this case you can limit the forces by setting minimum and maximum values in the Control System dialog box.
In any case we can improve the control system in a further step by damping the pendulum oscillations.
U. Control System Second Step
97. Choose "Control Systems" from the pop-up menu of the List Tool window.
98. Double click on the rst and, until now only, control system that is shown.
We want to expand the formula that is shown in the lower part with a damping term. It is most simple to just dampen the temporal differential of the variable that you want to damp. We want to damp an angle so we use the angular velocity as criteria for the damping term. Our damping should then be proportional to the angular velocity of the rod and should counteract the turning angle or angular velocity. Again, choose from left to right through the tables. Select in this order:
99. Y (input)100. Object101. Rod102. Angular velocity103. Value
Inverted Pendulum
17
In words: we have assigned the angular velocity of the object rod to the input channel Y.
104. Switch to the m-kg-s unit system. 105. Set the proportionality factor b = -0.1106. Close the dialog box: OK107. Save the last condition of the model: Save
When we set the simulation back into motion we'll notice that the rod oscillations, after a few oscillation periods, will come to a stop and the carriage, as a consequence, will move over the table with constant velocity until it falls over the edge of the table.
V. Further Procedures You can expand the control system yourself with additional terms that pull the carriage into the middle of the table and also dampen this procedure.
For this task, it is best to open a new control system because you will need at least two terms for this task. In the current control system there is however only one term available. The principle of superposition allows you to overlay as many control systems as you want onto the same object. The effect is the same as if all terms were packed into one control system. The division of different control tasks into several control systems however improves the overview. We have built a control system for balancing the rod. You could now build a second control system for positioning or centering the carriage and see how the two systems interact.
Inverted Pendulum
18
Damped Pendulum
19
Damped Pendulum
The mathematical and physical pendulums are classic examples from physics lessons that everyone who has gone through these classes knows. In this example we'll take this sort of pendulum in connection with a damper that damps the oscillations of the pendulum. The result is a so-called "damped oscillation".
Building up the experiment is very easy and can be done quickly. A pendulum consisting of a rod and a pendulum weight that is attached to the upper end of the rod to a xed point where it can turn freely is created. A damper is stretched between the pendulum rod and a xed point of space (xed point). While the pendulum swings, the cylinder of the pendulum will continually move back and forth. Because each movement of the damper cylinder produces a counter-force that is proportional to the relative velocity between the cylinder and the damper casing, the movement of the pendulum is gradually stopped. How quickly this happens depends, among other things, on the so-called damping constant of the damper. With a given experiment procedure we can test the effect of different damping constants on the otherwise unchanged model (experiment).
We want to deal with the following problems in this example:
Constructing a simple model. Creating a damper. Associating a damper with xed points and objects. Assigning a starting velocity to an object. Opening, dening and representing a graph.
Damped Pendulum
20
The recording of physical data to an external le.
FIGURE 7. The model, consisting of a pendulum and a damper
Setting the Scale Our model should be about 40 cm high. We want to see the entire y-space from 0 cm to 40 cm on the screen at the same time.
1. Press once on the upper zoom button in the button bar of the model window.
Mass of Pendulum
Rod
Damper
Fixpoint& Link
Link
Link
Fixpoint& Link
Damped Pendulum
21
The Pendulum Rod
Drawing the Pendulum Rod
2. Select the button with the rectangle symbol from the Drawing Toolbox.
3. Draw the rectangle from (-0.4, 0.4) to (0.4, -40.4)
Changing the Pendulum Rod into an Object
4. Select the rectangle and open the "Create Object" dialog box (construction menu).
5. Enter the following information into the Create Object dialog box:
Select the rectangle in the Graphics dialog box. Select "Pos. Element" with the pop-up menu "Mass Contribution". Select "functional" from the pop-up menu "Functionality". Dene the material as steel by choosing the variable "steel" from
the pop-up menu "Simple Material". Dene the thickness as 0.4 cm (Careful: the mks system is
activated! 0.4 cm = 0.004 m). Give the object the name "pendulum rod".6. 6. Close the dialog box with "OK".
The Pendulum Mass
Drawing the Pendulum Mass
7. Choose the circle symbol from the Drawing Toolbox.8. Select the method free centered.9. Hit the mouse button at the point (0, -40.0) and move the mouse
(with the button still pressed in) until the radius of the circle is about 5 cm. You can read off the radius in the Numeric Tools dialog box to help.
Changing the Pendulum Mass into an Object
10. Select the circle you've just drawn and choose in the menu "Create Object".
11. Fix the following settings in the dialog box.
Damped Pendulum
22
Select the circle in the Graphic dialog box. Select "Pos. element" with the "Mass Contribution" pop-up menu. Select "functional" with the pop-up menu "Functionality". Dene the material as lead with the pop-up menu "Simple
Material". Give the object the name "pendulum mass".12. Close the dialog box with "OK".
Now set two raw data points. One will be used for the hanging of the rod and the other for the connection between the pendulum mass and the pendulum rod.
Connecting the Pendulum Mass and the Pendulum Rod
13. Select the point in the Drawing Tool dialog box.14. Press the mouse button at the point (0, -40.0).15. Now select the point in the center of the circle, the pendulum rod
and the pendulum mass together by selecting the point normally and the other two objects with the help of the shift button.
Note: If the selection of a point becomes difcult because the point in question is a reference point for many elements and objects, then try to select the point with the selection rectangle.
16. Choose the command "Create Link Normal" from the Construction menu.
Now the rod and the pendulum mass form a unit. The completed pendulum now has to be hung so that it can rotate.
Hanging the Pendulum 17. Select the point button from the Drawing Tools dialog box. 18. Press the mouse button at point (0,0).19. Select this point.20. Choose the command "Create Fixed Point" in the Construction
menu.21. Select this xed point and the pendulum rod.22. Choose the command "Create Link Normal" from the
Construction menu.
Damped Pendulum
23
The construction of the pendulum is now nished. We can now move the pendulum as a whole to test. If we have done everything correctly then the pendulum should always move as a whole around the pendulum axis when we select the pendulum rod and execute a method of movement (for example, "Free Rotation").
Moving and Checking the Pendulum
23. To check, we should rst select the pendulum rod.24. Next, select the button for rotations in the Drawing Tools dialog
box and activate the method "Free Rotation". 25. Now, "grasp" the pendulum mass (with the mouse) and move it
back and forth.
If something falls out of position then a mistake has been made.
26. Finally, move the pendulum back to the perpendicular position.
Damper
A damper is constructed by rst drawing a line that denes the position and the length of the proposed damper.
Drawing the Damper 27. Draw a line from (20,0) to ( 0, -5).
Notice that the orientation (from -> to) determines the orientation of the damper (casing -> cylinder).
28. Select the line and choose the command Create Damper from the Construction Menu.
29. Press the button "Set Defaults" and afrm the test question of the system.
30. Raise the damping constant by a factor of 10, that is, set the value 1.0e-2 kg/s (msk system) into the corresponding eld.
31. Exit the dialog box by clicking on the "OK" button.
Damped Pendulum
24
Afxing the Damper We want to attach the back end of the damper, that is the tab of the casing, to a xed point. We will couple the front end of the cylinder with the pendulum rod.
32. Select the point button (third column, all the way to the top) from the Drawing Tools dialog box.
33. Click the mouse button directly on the back tab of the damper (20, 0) to set the point.
34. In the same way, set a second raw data point at the point (0, 5).35. Select the rst of the two points, that is the point at (20, 0) and
change it into a xed point by choosing the menu command "Create Fixed Point" from the Construction Menu.
36. Finally, select the created xed point and, with the help of the shift button, the damper itself.
37. Execute the command "Create Link Normal" from the Construction menu.
The back of the damper is now xed in space. Now we can connect the cylinder with the pendulum rod.
38. Select the three objects or elements Pendulum rod Cylinder Raw data points (0, -5)
by selecting the rst item normally and the other two items with the help of the shift button. The order does not play any role, as usual with the setting up of links.
39. Choose the menu command "Create Link Normal" once again.
Various Points
Gravity 40. Use the command "Set Gravitation (Lab)" from the "Fields" menu.
Damped Pendulum
25
Fields are also shown in the List Tool. The dialog box for editing a eld can be called up by double clicking on the corresponding line in the List Tool.
Beginning Velocity of the Pendulum Mass
If we were to set the simulation in motion now, not too much would happen because all objects are in still settings. We want to assign a certain beginning velocity to the pendulum mass.
41. Select the pendulum mass.42. Open the "Edit object" dialog box in the Construction menu. As
an alternative, you can also open the dialog box by double clicking on the correct line in the List Tool.
All data and information about the pendulum that has so far been set or calculated is shown in the opened dialog box. In the left half of the dialog box you can see the elds with the velocity values (V [m/s]), that is, one for the x components and one next to it for the y components.
43. Set the value of the x component of the velocity to 1.0 m/s. 44. Exit the dialog box with "OK".
Saving the Model It is now high time to save the model!
45. Choose the command "Save" from the menu and give the model a name.
You may even want to carry out the simulation with an extra copy of the model so that the beginning conditions of the model are not changed in your only copy.
46. Use the command "Save As" and assign the model a second name.
Finally, you can use this last le to work with and to carry out the simulation. Hold on to the rst one as a reserve.
Damped Pendulum
26
Graphs
Before executing the simulation, you should open a graph to allow yourself to record, for example, the position along the x-axis during the simulation. At the same time you want to be able to write the data of the same physical variables onto an external data le so that you can use it later with another program (for example with a spreadsheet program).
The command for the call-up of a new graph can be found in the Tools menu.
47. New Graph
You need to tell the system what you would like to see. You can do this with the so-called Variables dialog box.
48. In the button bar of the graph, press the rst button (Var).
You need to specify the variables that should be represented in the dialog box that will now open. You need to do this once for the horizontal axis, that is the x-axis, and once for the vertical axis, that is the y-axis. You can do this by choosing twice (once each for each axis) from left
Damped Pendulum
27
to right in the dialog box. In both of the following pictures, the lines that we choose for each axis are shown:
FIGURE 8. The first round determines the variables for the x-axis.
FIGURE 9. The second round defines the variables of the y-axis
Damped Pendulum
28
Expressed in words, we have selected the following variables:
49. x-axis: time50. y-axis: the x component, that is the horizontal position of the
pendulum mass.51. Afrm the entries with "OK".
Recording Data This is everything that has to be done with regard to the graph. In addition however we want to show how to take the same data that you have just chosen and write it to an external data le.
52. Press the "Record" button in the button bar of the Graph window.
Two dialog boxes will now be displayed. The system wants to know the following information:
How often should the data be saved? Under which name should the data be saved? 53. These questions are addressed by lling in the dialog boxes as in
the following::
FIGURE 10. External data recording is specified with two dialog boxes
You can see from the color of the small point in the Record button that a recording is in progress. The small point will be shown in red.
Damped Pendulum
29
You may want to move the graph again or change its size before starting the simulation. If so, just do it! You can however also do or repeat this later at any time.
Simulation
54. Execute the simulation with the command Run (from the Simulation menu).
FIGURE 11. The pendulum oscillations show the characteristic picture of damped oscillations
Note that the curve shown in the picture will be obtained only after a bit of time, namely, after about 25 seconds of simulation time. Until it is so far, the graph will be automatically scaled continually.
You can of course test further simulations with different values for the damping constants of the damper.
Damped Pendulum
30
Ending the Simulation and the Data Recording
You can end the data recording on the external data le at any time by clicking on the "Record" button again. The color of the small point on the Record button will turn to black to show that no recording is taking place any more.
If you close the model without having rst switched off the recording, the recording will stop, that is, be turned off "in an orderly fashion" automatically with the closing of the model.
Processing the Recorded Data
The le with the recorded data is of the type 'TEXT' and can be loaded with any word processing program and with any spreadsheet program. Do not load these les however by double-clicking on them, but rather through the program that you want to use them with.
The recorded data has already been divided into two columns. The rst column represents the x values (time) and the second column the y values (x position). silux sets a tab between the x and y values and a return after each entered y value
Set of Pulleys
31
Set of Pulleys
Introduction
This example will stretch the silux program to its limits in regard to the calculation time. Not because the problem of the set of pulleys is physically so complicated, but rather because in this example we want to simulate a cable that requires about 250 objects alone. If you want to simulate the physical behavior of a cable in a realistic way, you can only do it by breaking the cable down into an appropriate number of linked objects. If you manage this however you can model the physical behavior of the cable in detail. The local inertia, transversal and longitudinal oscillations and the movement behavior of the cable, both local and as a whole is simulated realistically. Naturally, this also holds for all objects that come into contact with the cable. We will deal with the following problems in this example:
Drawing raw data Creating objects Creating xed points Creating links Moving, placing objects Placing a cable path around wheels Creating a cable Creating a gravity eld Saving the model Simulating the model
Set of Pulleys
32
The Cable Pulleys
First, start the program. A new, empty Model Window will appear.
1. Choose the circle from the Drawing Tools.2. Additionally, select the method: free centered.3. Place the circle, that is, the mouse, at point (15, 18) and draw a
circle with a radius of 2 cm by releasing the mouse button again at point (17, 18).
Draw an additional circle by repeating steps 1 through 3 as follows:
4. Center of circle (15, 14), radius 1 cm.
We will add to each of these 2 circles a concentric smaller circle. These circles are representing the function of a groove
5. 5. Drawing Tool: circle / method: Free Centered6. 6. In each of these 2 circles, draw a concentric circle: In the larger
one: circle radius 1.8 cm, and in the smaller one: circle radius 0.8 cm
7. 7. We now want to change these four circles into objects8. 8. Select the 2 rst concentric circles by clicking with the mouse
button somewhere on their periphery (use the shift key)
Each circle will be highlighted with four markings.
9. Choose the menu command Create Object.10. In the Graphics dialog box select the inner-circle also by clicking
on it.11. Choose Pos. Element from the pop-up menu "Mass
Contribution".12. Choose Functional from the pop-up menu Functionality.13. Choose wood from the Simple Material pop-up menu. 14. Choose Wood Color from the pop-up menu Color.15. Press the "OK" button.
You can change the second set of the 2 concentric circles into an object in exactly the same way by repeating steps 8 through 15.
Set of Pulleys
33
We have now nished two of the four cable pulleys. We will create the other two by duplicating these rst two.
16. Select the rst pulley.17. Choose in the Edit menu the command Duplicate.18. Select the second pulley.19. Choose in the Edit menu the command Duplicate.
The two new pulleys now have to be moved into position:
20. Move the small pulley so that its center lies at the coordinates (15, 8).
21. Move the large pulley so that its center lies at the coordinates (15, 4)
Pulley Holders
The two upper, as well as the two lower pulleys, should be connected with a pulley holder. These pulley holders will later take over the job of the suspension of the load and of the pulley system itself.
22. Choose the rectangle from the Drawing Tools.23. Draw a rectangle of the coordinates (14.5, 22) by (15.5, 12.5).24. Choose the menu command Create Object.25. Choose the rectangle from the Graphics dialog box.26. Set the pop-up menu Mass Contribution to Pos. Element.27. Set the pop-up menu Functionality to Functional.28. et the Simple Material pop-up menu to Steel.
We assume that the thickness of the metal sheet of the pulley holder is 1 mm on both sides of the pulleys.
29. Set the thickness of the object to 0.2 [cm].(Block geometry (->) Field Thickness(*) )
FIGURE 12. Cable pulleys and pulley holders
Set of Pulleys
34
The cable, which will be dened later, should not collide with this pulley holder because the cable will later run directly around the pulleys through the pulley holders. Basically, this pulley holder does not have to collide with any other object and for this reason we can shut it out of the collision control entirely.
30. Turn off the check box Interaction...Member.31. Exit the dialog box with "OK".
The lower pulley holders can be created by duplicating the upper ones.
32. Select the pulley holders33. Choose the menu command Duplicate34. Move the second pulley holder below to its place, symmetrical to
the upper pulley holder.
Linking the Pulleys and the Pulley Holders
When establishing a link between two objects, you need to set a raw data point to show where exactly the link between the two objects should be placed.
35. Choose the point symbol from the Drawing Tools (third column, to the top).
36. Place the point directly in the middle of the upper cable pulley with a mouse click.
37. Select this cable pulley, the pulley holder that corresponds to it and the drawn point (use the shift key).
38. Choose the menu command "Create Link Normal"
Now the two objects are linked together at the spot of the point. When you set a link between two objects, the program always creates a bilateral interaction rule automatically which turns off the collision control between the two objects.
39. Repeat this procedure for the other three cable pulleys.
It's time to save what we have drawn up to now.
Set of Pulleys
35
40. Choose the menu command Save and give the document a name.
Intermission 41. Pause
Deviating Roller
FIGURE 13. The deviating roller of the pulley system
We want to create a deviating roller set off to the left, at the height of the uppermost cable pulley. The purpose of this roller is to make sure that the two weights that we want to hang on the set of pulleys or the ends of the cable later, do not collide but can rather move vertically freely.
42. Choose the circle from the Drawing Tools.43. Choose the drawing method Free Centered.44. Place the circle at the coordinates (10, 19) and draw a circle with
a radius of 1 cm.45. Draw also in the deviating roller a concentric circle with a 2 mm
smaller radius, like you did it for the other pulleys.46. Change this 2 concentric circles into an object, exactly the same
way as with the last four pulleys.47. Place a raw data point in the center of the deviating roller.48. Select this raw data point.49. Choose the menu command Create Fixpoint50. Select the deviating roller and the new xed point.51. Choose the menu command "Create Link Normal".
We have now created a deviating roller that is rmly anchored in space. We also need to hang the upper pulley halter of the upper pair of pulleys to a xed point. On closer examination, it becomes clear that well have to x this pulley holder with two links because otherwise the weight of the cable would cause this pulley holder to turn around the one link until the upper-most cable pulley collided
Set of Pulleys
36
with the deviating roller. In other words, the cable that will later be stretched over the two upper pulleys (the diversion pulley and the upper-most cable pulley) would pull them together under a load. This is a direct consequence of the deviating roller. So that this does not happen, we will secure the upper pulleys with two links so that they are relatively xed in space.
The same result can be reached in xing the upper pulley in space, when you deactivate in the "Create/Edit Object" dialog box the check box "Simulation ... Member" in the box "General".
FIGURE 14. Securing the Upper Pulleys
The Cable Path
The silux program is able to process lines, curves and combinations of lines and curves into cables. The Cable dialog box expects the input of a curve-path to tell it where the cable should be placed. You can take care of the joining together of curves and lines yourself with the corresponding drawing functions and methods. silux provides however an additional special drawing method for cases where the cable path needs to go around wheels.
It is a function that independently recognizes the underlying contours. When placing the cable path around the pulleys shown in the margin, you dont have to do anything but click on the mouse button 11 times at the positions shown and then set a nal double click the 12th time.
52. Choose the curve symbol from the Drawing Toolbox (third column, fth button from the top)
53. Choose as Drawing Method: Cable Curve (line+arc+...).54. Click the mouse button once on each station 1-11 as shown in the
diagram.55. Make a double click at the place where the cable-path should
end
Set of Pulleys
37
56. Pay attention to the fact, that the Cable Curve must always be tted onto the exterior concentric circle of each pulley and not onto the groove circle.
FIGURE 15. Laying the path of the cable around the pulleys
After the double click, the lines and the curves will be automatically joined to form an element group; that is, if the curve-path is selected in some area, then the entire cable is selected as a whole.
This function allows for the creation of open as well as closed cable paths. The cable pulleys must be objects so that the cable path function recognizes them as such. Laying a path around a raw data point does not then work.
2
3
5
67
8 9
1011
12
4
1
Set of Pulleys
38
Cable Dialog Box
FIGURE 16. The cable path in the Cable Dialog Box
57. Select the cable path by clicking on it.58. Choose the menu command Create Cable...
This dialog box allows you to design the cable-path in many different ways. We dont however want to explain the dialog box itself at this point, but rather just choose the most simple way.
After the dialog box is opened the geometry of the cable path is
Set of Pulleys
39
shown in the Graphic dialog box. The standard setting shows a cable with a diameter of 1 mm and a constant distribution of cable elements along the path of the cable. We will use the standard settings.
59. Leave the dialog box with OK.
Back in your model youll see that the system has laid a cable for us along the cable path. The system does not erase the cable path in case you want to use it again elsewhere. If you are satised with the result, you can however remove the cable path yourself. It is best to do this through an enlargement so that the cable elements and the cable path can be distinguished from each other and selected more easily.
60. Select the cable path.61. Choose the menu command Cut
If you are not satised with the cable, you can eliminate it as easily by just selecting the cable and executing the Erase command.The following remains to be said about the selection of the cable:
The cable can be selected in three areas
The rst element The last element The cable as a whole (everywhere in between)
The objects on the ends of the cable can be selected separately so that the cable can be connected with other objects or xed points at its ends.
The rest of the problem consists of the following work:
Fixing two weights (for example, made out of lead). Linking the left-hand weight with the end of the cable. Linking the right-hand weight with the lower pulley holder. Linking the other end of the cable with the upper pulley holder Activating the gravity eld.
Set of Pulleys
40
Saving and create a duplicate of the model.
FIGURE 17. The completed model before the start of the simulation
Simulation
Check whether the Gravitation (Laboratory) is set on, and start the simulation with the menu-command "Run".
Clockwork Mechanism
41
Clockwork Mechanism
In this example we will construct a mechanical clockwork mechanism. The example Clockwork 1 will then later be expanded in various parts in example Clockwork 2, but will be left out in this example. We will not draw the watch ourselves but will rather use the drawing of a watch mechanism from another computer system.
We are using then a drawing of a real clockwork, as would be produced on a CAD system of a watch-making rm. To enable us to transfer the le to our system, the company created a so-called DXF le with their CAD system. The DXF format was originally developed by the Autodesk rm and, along with the IGES format, belongs to the group of most frequently used le formats for le exchanges between different computer systems and platforms in the CAD environment.
We will deal with the following problems in this example:
Importing a DFX le. Checking and ltering the imported les. Eliminating surplus data. Completing missing data. Processing data into a working model. Simulating the model. Recording the simulation as a Quicktime movie. Analyzing the functions of a clock.
Please save the model regularly under a suitable name: no corresponding commands will be given in this example.
Clockwork Mechanism
42
Loading the DXF Files
At each new program start we are shown a new, empty Model Window. The function used for data-import opens however its own window so that well have to close the existing window before we can use the import function.
1. Close the Model Window
(Click the "Close-Box" in the upper left-hand corner of the model window.)
2. Choose the command Import DFX le in the Menu le and open the le Clock-1.DXF.
After you have selected the Open button from the Standard File dialog box, the program will begin to load the data. The loading procedure will take longer than it takes to open a normal model le. The reason for this is that the data is on the one hand not saved in compact form as in a model le and furthermore the data must be translated into the program specic data format as it is being loaded.
You will be shown the number of the already-imported elements during the loading procedure in the upper part of the Model Window.
If the imported raw data elements are visible in regard to the coordinate system of the Model Window as it is set at this moment, then the elements will be shown in the same way during loading. In the other case, when the raw data elements lie outside of the visible area of the Model Window, then the coordinate system is
Clockwork Mechanism
43
automatically shifted with the roll bar so that the imported drawing is visible.
FIGURE 18. The parts of the watch after loading the DXF files
After this point you can control the position and the scaling of the drawing yourself.
Preparing the Raw Data
An imported drawing is generally prepared with the following functions before being processed.
Elimination of double elements Creation of open and closed curve-paths Completion of missing parts Completion of open parts Setting pivoting- and fastening-points
A. Eliminating Double Elements
Two dimensional models in particular may have double elements without the original drawer knowing about them. With double
Clockwork Mechanism
44
elements we refer to identical elements that sit directly on top of one another in the same location so that they simply appear as a single element. These elements are neither visible nor do they disturb anything or stand out in any other way. In the silux program however these elements are not desired because they interfere with the following function of automatic linking to element groups. For this reason the silux program provides the user with a function that recognizes and eliminates such double elements.
3. Execute the Search for Identical Elements function. It can be found in the Functions Menu.
As soon as the function has discovered a double element, it will announce it with a peep and will select one of the two identical elements.
4. Use the command Cut or Clear from the Edit Menu to eliminate the element.
Repeat steps 3 and 4 until the program is free of double elements (that is, until no more are identied by the silux program). It its original condition the Clock-1.DXF les has 5 double elements. After using this control function we are sure that there are no more spare elements.
B. Creating Open and Closed Curve-paths
Evidently, in the silux program closed curve-paths are processed into objects. An object can also contain individual lines and curves, but only as decorative elements. All elements that are meant to make a contribution to the mass of your object must for obvious reasons be closed curve-paths.
Imported drawings often contain elements that are un-grouped or grouped according to different conditions and which cannot simply be transferred to silux in their delivered form. For this reason silux treats individual elements as loose, un-grouped elements during loading and then groups them itself according to its own rules. silux has its own function for solving this puzzle task. Exactly speaking there are two functions; one for closed and one for open curve-paths.
Clockwork Mechanism
45
Group All (Closed Data) Group All (Open Data)
These two functions can however also be called up together rather than individually with the command
Group All.
They will then be executed one after the other in the given order. All three functions are in the Edit Menu.
The functions try, starting with the rst element, to nd additional elements that can be linked seamlessly to the respective end of the preceding element. The function Group All will try to nd closed curves and then use the remaining elements to dene open curves. When joining the individual elements the program uses a certain tolerance value, within which the corresponding line or curve elements will be connected. The magnitude of this tolerance value, which determines the maximum permissible divergence and within which two points are considered to be identical, can be preset by the user.
5. Use the function Group All in the Edit Menu.
In the model Clock-1 that we want to produce we will eliminate a part of the data. At this point we are only interested in the most important core parts of the watch which are of central signicance to understanding the workings of a watch. We will build the complete watch with all of its parts later in the Clock-2 model. The core parts of the watch that we want to use right now include the following parts:
Balance Wheel Escapement
Clockwork Mechanism
46
Pawl Wheel (escapement wheel)
FIGURE 19. The simplified clock model
C. Reduced Model 6. Remove all parts of the clock until only the parts shown in the upper picture are left.
You can do this by clicking a part that you want to remove (that is, by selecting it) and then executing the Cut or Clear command. The generally known button combinations for cutting (CTRLx) makes this task easier.
The state of the model after this procedure is available under the le name Clock-1.Text-step-01 and can be loaded with the menu command Import TEXT-File.
7. Save the model in this state and continue work with a copy.
Completing Missing Parts
Unfortunately, some parts that are essential to creating a functioning watch are not included in the imported les. As a rst step we will create these parts as additional raw data. The following parts are involved:
Clockwork Mechanism
47
End-catchers or -stops for the escapement Lever head Cam disk
FIGURE 20. Auxiliary Construction for Positioning the Stops/Escapement
D. Completing the Stops for the Escapement
8. Draw the upper circular stop so that it is more or less the size and in the position shown for circle (a) in the gure above.
It doesnt matter if the circle is a bit larger or a bit smaller or if it is in a slightly different position because we will set the exact size and position of the circle with the Numeric Tools box.
9. Select the center point of the circle (a) and correct the radius in the Numeric Tools box to 0.2.
10. Now move the circle manually so that it exactly touches the edge of the escapement.
To do this it is a good idea to use an enlargement of about 2000%. You need to make sure that the circle to the left of the escapement does not touch its side where it widens into a fork. The point of
a
b
c
d
ef
gh
m
Clockwork Mechanism
48
contact should be further to the right, that is at a point where the contour of the escapement is still straight.
For the interpretation of the drawing, well assume that the escapement is placed in the upper terminal apparatus. The position of the escapement, especially that of the escapement stone in relation to the escapement wheel, suggests that this is so. The other, that is the lower extreme position of the escapement, should therefore be set symmetrically on the center line (b), which links the rotation axes of the balance wheel and the escapement.
In the following we will use an auxiliary geometric construction to place the lower stop of the escapement symmetric to the upper stop in regard to the middle line.
11. Select the two circle centers (c) and (d) by using the shift button.12. Choose the Line Tool from the Drawing Tools Dialog Box
(second button from the top in the third column). 13. Choose the method ( Endpoint > Endpoint) and click with the
mouse button in the drawing.
The center line (b) will appear. Next, we want to draw a line that is perpendicular to the center line and goes through the middle of the rst stop.
14. Select, in the following order, the three points (c), (d) and the center of (a).
15. Choose the Line Tool from the Drawing Tools dialog box.16. Choose the method ( Perpendicular > Point) and use the
mouse to draw in the gure by clicking with the mouse button above the circle (a) and moving down with the mouse (with the mouse button still depressed) so that the line is about the same length to either side of the center line.
Now we want to draw the large circle (e) so that the circle (a) can then be mirrored symmetrically on the symmetry axis (c-d). The center of the large circle should be where the center perpendicular line intersects the symmetry axis. The circle should, in addition, travel through the center of (a).
Clockwork Mechanism
49
17. Select these two points, that is, rst the point of intersection (f) and then the center of (a).
18. Choose the method ( Center > Point).
The order is important because according to the method, the rst point given is the center and the second point is a point on the periphery.
19. Click anywhere in the drawing. It doesnt matter where because with this method there is only one solution as to where the circle can be placed.
The large circle gives us the planned center of the lower stop.
20. Select this center (g).21. Choose the method ( Center).22. Draw, in the planned spot, a circle that is more or less the same
size as the upper stop.23. Select the center of the circle (h) and correct the radius in the
Numeric Tools dialog box to 0.2.
We have reached our target. Our construction has allowed us to draw the lower stop analytically exactly symmetrical to the upper stop. We can now remove the elements that we used to help us because we dont need them anymore. We can remove all of these elements by selecting them individually and erasing them with the Menu Command Cut or with the corresponding button combination (Ctrl. X). We should remove the following elements:
24. Center, perpendicular line (m)Circle (e)Axis of symmetry (b)
E. Completing the Lever Head
There is no lever head at all in the imported drawing. The lever head involves a small pin that is placed near the center of the balance wheel and which moves back and forth, corresponding to the movement of the balance wheel. The lever head interacts with the fork of the escapement during this circular motion and turns it from the upper to the lower stop and then back again at the next go-round. The lever head therefore has the function of moving the turning the
Clockwork Mechanism
50
escapement up and down. The lever head is in the shape of a half moon. In order to execute the construction of the lever head we will go closer to the center.
25. Use the zoom functions to display the center of the balance wheel and the area of the escapement fork in a larger format. An enlargement of about 1000% is needed.
The moon-shaped lever head consists geometrically of a arc and a line. The arc of the lever head can be drawn anywhere in the gure. This arc will later be dened completely with the Numeric Tools box.
26. Draw a arc somewhere. It can be any size and it doesnt matter what sort of starting- or ending-arcs it has.
The center of the lever head should, in the starting position, lie at around the same height as the center of the balance wheel. We can read the approximate value of this y coordinate from the scale off to the side. We can however also determine it exactly:
27. Move the mouse to the center of the balance wheel. When the mouse pointer turns into a small circle, depress the mouse button. You can now read the y coordinate in the Numeric Tools box with 5.854e+01.
Our arc should also have this y coordinate.
28. Select the start- or the end-point of the arc that you just drew. 29. Write over the values that appear in the Numeric Tools box with
the following values:
x = 55.8y = 50.854 (as read off from above)Radius = 0.17Starting angle = 60Ending angle = -60
The diameter, or the radius, of the arc is chosen so that the lever head can t into the fork without getting jammed. The sideways position of the lever head, that is, its x coordinate, must be set so that its at side can just move past the outer side of the fork. The lever head will later be rmly linked to the balance wheel and moved along with it
Clockwork Mechanism
51
in a circle. During this circular movement the lever head should not disturb the ends of the fork prongs but should just reach into the opening of the fork and move it in this way.
Close the arc with a line:
30. Select the two ends of the arc.31. Choose the Line Element in the Drawing Tools box.32. Choose the method ( Endpoint > Endpoint).33. Click somewhere in the drawing.
We now want to link the arc and the line to a closed curve element. While doing this, make sure that you dont unintentionally or intentionally move the positions of these elements. Hold the mouse steady and in place while clicking with it.
34. Select both elements (arc and line). (For the second selecting use the shift button).
35. Choose the command Group Selection from the Edit Menu.
F. Completing the Cam Disk
The cam disk is a stop for the escapement. It makes sure that the escapement, in its outermost positions, pauses at the two stops. The cam disk has a groove which makes sure that the escapement can change from one stop to the other only when the balance wheel is in a specic position.
36. Select the center of the balance wheel (point).37. Choose the button Arc in the Drawing Tools box.38. Choose the method ( Center).39. Draw any arc around this center point. The exact values will be
set with the Drawing Tools box.40. Select the start- or the end-point of the arc.41. The numeric values that now appear in the Numeric Tools box
must be replaced with the following values:
y = 50.854 (y coordinate of the center of the balance wheel)
Clockwork Mechanism
52
Radius = 0.385Starting angle = 30 ()Ending angle = -30 ()
In the opening of the arc, we will construct a groove. Located at the bottom of the incision, the groove consists of an arc that is anked on both sides by two lines.
42. Draw an arc somewhere.43. Select the end of the arc.44. The numbers that appear in the Numeric Tools box should be
corrected as follows:
x = 55.5y = 50.854 (y coordinate of the center of the balance wheel)Radius = 0.15Starting angle = 120 ()Ending angle = -120 ()
We now need to bind the end points of the two arcs with lines (the sides of the groove):
45. Select the two starting points of the arcs.46. Choose the button line from the Drawing Tool box.47. Select the method ( Endpoint > Endpoint).48. Click somewhere in the drawing.49. Do the same thing with the two endpoints of the two arcs.
The cam disk now consists of four elements; of two arcs and two lines. We want now to change these four elements into a single closed curve element. Again, be careful not to accidentally move these elements while selecting them.
50. Select all four elements.
Clockwork Mechanism
53
51. Choose the command Group Selection from the Edit Menu.
FIGURE 21. The completed data
H. Completing Open Parts
For apparent reasons, the silux program can only turn closed curve-paths into functional object elements. Only closed curve-paths can have a mass and a volume. In the two-dimensional drawing that we have imported, such considerations were of course insignicant. The original drawer of our gure didnt have to think about such things.
G. Completing the Escapement
The escapement has an escapement stone on both of its arms. Each escapement stone reaches into the so-called escapement wheel during operation of the watch in order to keep it under propulsion or to keep a wheel that has a torque applied to it from turning all the way.
The drawer of the watch has not drawn the contour of the escapement as a closed curve but has rather drawn the path of the line only to the two escapement stones and then jumped over them graphically. For our purposes though the open area must be closed by a connection or, even better, the contour of the escapement could be led around the two escapement stones. The second solution possibility corresponds rather closely to reality and so we will use that one..
cam -disk
lever head, pin
stop
stopbelow
escapement
above
Clockwork Mechanism
54
FIGURE 22. The Escapement Before and After the Completion of the Contours.
The line path to be completed consists of three parts of lines. We could draw them all together at one time as a line with the drawing tool Line Path. This possibility however has the disadvantage that there is no available way to link the two endpoints of the line-path to the existing contour in an analytically exact way.
We can draw the missing contour out of three individual lines:
52. Select the two points 1 and 2.53. Choose the button Line in the Drawing Tools box.54. Choose the method ( Endpoint > Endpoint).55. Click anywhere in the drawing.56. Follow exactly the same procedure for the next line; that is with
points 3 and 4.57. Move the escapement stone, which already forms a closed curve,
a small step away from where it is so that the two endpoints 2 and 3 can be denitively selected.
58. Select the two points 2 and 3 and link them with the same method as before.
1
2
3
4
Clockwork Mechanism
55
FIGURE 23. The escapement after completion of the contour
For now we will leave the escapement stone next to the escapement. Before we put it back into place we will want to use the Group All function and using it could be difcult if there were several possibilities for creating closed curve-paths. Before we do this though, we want to complete the opening for the lower escapement stone with three lines as well.
59. Complete the contour completion in the area of the other escapement stone.
Check one more time to make sure that the two escapement stones are placed outside of the openings. They should lie a bit to the side.
60. Execute the function Group All from the Edit Menu.61. Move the two escapement stones back to their places. Use a
suitable enlargement so that you can place them as exactly as possible.
H. Completing the Knife With the term knife we mean to refer to the pointer-like rod that serves as a stop at the end of the escapement and which can reach into the groove cam disk. This knife is not complete either; that is, it is not yet a closed curve-
Clockwork Mechanism
56
path. It still needs a line of connection at its base, where it sits on the escapement.
FIGURE 24. The missing base-line of the knife
62. Select the two base points of the knife.63. Choose the line symbol from the Drawing tools box.64. Select the method ( Endpoint > Endpoint).65. Click somewhere in the drawing.66. Now select the two elements that comprise the knife.67. Use the menu function Group Selection to transform the knife
into a closed curve-path.
Important: Do not use the function Group All again because doing so would dissolve all existing groups in the model and build them up new. If you did this, the problem already mentioned of the escapement stone sitting in the escapement would then surface again.
Note The 12 screw heads that can be seen around the balance wheel do not have any closed curve-paths either. This doesnt matter to us though because we just want to use these parts as decorative elements without any mass-contribution.
base-line
knife
Clockwork Mechanism
57
I. Setting Pivoting- and Fastening-Points
The parts of the watch that we are concentrating on in model Clock-1 need to be pivoted and fastened. Because the frame which usually bears these elements is missing in our model, we have to provide a corresponding substitute. We want to create xed points on the planned pivoting points that will then serve as space-bound fastening points for our watch, in that certain parts will later be linked to these xed points.
In this model there is a total of three xed points to which we will later fasten our clock parts. Each of these points is set in the same way. Each of these points is at an existing circle center. We can set these points analytically exactly in the center of these circles so that the wheels do not wobble during the simulation when they are turning.
68. Select the planned position of the point in the model (Point Selection cf. next Figure).
69. Choose the button Point from the Drawing Tool box.70. Select the method ( Point).71. Click somewhere in the Model Window.
The two escapement stops have not yet been fastened. We will not link these objects to xed points, but will rather just dene them as xed objects during conversion. Fixed objects do not move from their spots, even when outside forces work on them. They can however nonetheless take part in collisions so that other objects crash into them.
Clockwork Mechanism
58
FIGURE 25. Three pivoting- and fastening-points
At this stage, these 3 points are just raw data. They will be soon converted into xpoints.
Processing Raw Data into Objects
General We will now process the raw data into objects. We will dene each object in the so-called Create Object dialog box. For this procedure, we will not give a special thickness for the individual parts; this is simply because we do not know these values. We will assign each part a uniform thickness of 1 cm. We leave it to you to enter values that correspond more closely to reality if you want to. Just note that changing the thickness will also change the mass and the moment of inertia of a part and, with these features, the behavior of the entire system in relation to the inertia. For the same reason we also leave the material density at 1.0. Again, we leave it to you to change this if
1
23
Clockwork Mechanism
59
you wish. With these assumptions, the too large thickness (1 cm) is in part compensated by the too small density (1g/cm3).
The Escapement Wheel
FIGURE 26. The Escapement Wheel
72. Select the 6 elements shown above in the model: The gear rim The four-segment formed openings The borehole in the middle
You should not select the point in the center. This does not belong to the escapement wheel. This point will later be turned into a xed point, to which the escapement wheel will be xed.
73. Choose the command Create Object from the Construction Menu.
Check to make sure that you see all 6 parts in the graphics area of the dialog box. If this is not the case, exit the dialog box and try it again.
74. Select each of these 6 parts individually in the graphic area of the dialog box and assign them the properties as shown in the gure above by using the upper-most pop-up menus (Mass Contribution, Functionality).
Neg. Element,Decorative
FunctionalPos. Element,
Clockwork Mechanism
60
By doing this, you assign each of the 6 elements a mass contribution and a functionality. You can check each element at anytime by clicking again in the graphic area of the dialog box. The two pop-up menus (Mass Contribution, Functionality) will then automatically appear and will give the properties that are set for each corresponding object. In general, functional parts are shown as black and decorative parts are shown as gray in the graphic area of the dialog box.
Physically, we have done the following: rst, we interpreted the outer-most gear rim as a full disk and then gradually cut out the other ve elements from this whole-material. During this procedure you can see how the mass gets gradually smaller and how the center of gravity moves each time. In the end, this has to be in the center again.
75. Enter the name escapement wheel into the corresponding name-eld.
76. Close the dialog box by pressing the OK button.
Note Certain properties that relate to the collision control have deliberately not yet been set. We will return to this point and go into it in more detail later.
The Escapement.
Pos. ElementFunctional
Neg. ElementDecorative
Clockwork Mechanism
61
FIGURE 27. The Escapement
77. Select the two elements in the model as shown above: The contour of the escapement The borehole in the escapement78. Choose the command Create Object from the Construction
Menu.
Check to see if both objects can be seen in the graphic area of the dialog box. If this is not the case, leave the dialog box and try it again.
79. In the graphic area of the dialog box, select each of these parts individually and assign them the properties as shown in the gure above by using the upper-most pop-up menus (Mass Contribution, Functionality).
80. Enter the name Escapement into the corresponding eld.81. Close the dialog box by pressing the OK button.
The Escapement Stone FIGURE 28. One of the two escapement stones
82. Select one of the two escapement stones as shown in the gure off to the side:
83. Choose the command Create Object in the Construction Menu.84. Select the picture of this part in the graphic area of the dialog box
and assign it, with the two pop-up menus (Mass Contribution and Functionality) the two properties: Positive Element Functional
85. Enter the name Escapement stone 1 into the corresponding eld.
86. Close the dialog box by pressing the OK button.
Do the same with the other escapement stone.
The Stops 87. Change both circular escapement stops into two objects. Use the same properties as before (positive element, functional). Give them the names Stop 1 and Stop 2.
Clockwork Mechanism
62
88. Additionally, turn the Simulation Member property to OFF for both stops (no cross should be visible) and press the OK button.
The Balance Wheel
FIGURE 29. The Balance Wheel
92. Select all the elements shown above in the model:
You should not select the point in the center. This does not belong to the balance wheel. You should not select the cam disk in the center of the balance wheel either. Choose the command Create Object from the Construction Menu.
Check to make sure that all parts can be seen in the graphic part of the dialog box. If this is not the case, leave the dialog box and try again.
All elements, except for three, will be left with standard settings (neutral element, decorative). The three elements that we need to change are:
the two large outer rings the lever head
Neutrl. ElementFunctional
Pos. ElementDecorative
Neg. ElementDekorative
All otherElements are:Neutrl. ElementDecorative
Clockwork Mechanism
63
89. Select the outer-most large circle in the graphic area of the dialog box and set it with the pop-up menu (Mass Contribution) to positive.
90. Now select the inner of the two large rings and set it, with the same menu, to negative.
91. Finally, select the lever head in the middle of the balance wheel and set it, with the pop-up menu (Functionality) to functional.
What have we done? With the rst procedure, we dened a disk-formed mass out of which we cut a hole with the second operation. What remains is a ring; only the area between the two large circles has a mass.The third operation determined that the lever head should be the single functional element on the entire balance wheel. The lever head is then the only element on the balance wheel that takes part in collision control. In reality, this is also the only part of the balance wheel that comes into contact with another part. The escapement will be the collision partner during the simulation. The knife, which seems to cross through the path of the lever head, lies on another level and may not collide with it. We will come back to this point later.
92. Close the dialog box by pressing the OK button.
The Cam Disk 93. Select the cam disk in the model as shown in the following gure.
94. Choose the command Create Object from the Construction Menu.
95. Select the picture of this part in the graphic area of the dialog box and assign it, with the two pop-up menus (Mass Contribution and Functionality) the two properties:Positive elementFunctional
96. Enter the name Cam Disk into the corresponding eld.97. Close the dialog box by pressing the OK button.
FIGURE 30. The Cam Disk
Clockwork Mechanism
64
The Knife 98. Select the knife in the model as shown in the following gure.99. Choose the command Create Object from the Construction
Menu.100. Select the picture of this part in the graphic area of the dialog box
and assign it, with the two pop-up menus (Mass Contribution and Functionality) the two properties: Positive element Functional
101. Enter the name knife into the corresponding eld. 102. Close the dialog box by pressing the OK button.
FIGURE 31. The Knife
As a last step we want to convert the last three planned pivoting points to xed points. This is simple to do.
103. Select a raw data point.104. Choose the command Create Fixpoint from the Construction
Menu.
With the xed points, we have converted all raw data into objects. We will later open individual objects with the command Edit Object in order to assign specic properties with regard to the collision control. Before we do this however we want to look at a few details of construction more closely.
Clockwork Mechanism
65
Discussion of Details of Construction
FIGURE 32. The functional construction of the watch in two levels
Spatial Separation of Two Mechanisms
The attentive reader may ask him- or herself the question, Why not integrate the cam disk as a functional element in the balance wheel immediately? Along the same lines, Why dont we simply use the knife as a functional element of the escapement since well eventually have to x it to the escapement anyway?
The reason for this separation is the fact that, in the areas in question, we have two different, independent mechanisms that overlap each other in space, but which must be kept apart functionally. The two mechanisms are:
1. The escapement and the lever head. 2. The knife and the cam disk.
The lever head interacts with the escapement. The knife and the cam disk work together in the same way. The two mechanisms must be kept apart so that each element can interact with its partner without
Clockwork Mechanism
66
colliding with other elements. In reality, this works because the two mechanisms are arranged on different levels. This spatial separation is shown in the gure above, where the distance between the two levels is shown in exaggerated proportions for reasons of clarity. In our model we are doing, in principle, the same thing. We are separating the two mechanisms by creating them as distinct objects and by assigning them different collision rules (Interaction Rules).
We dene all four parts as passive in regard to the type of collision. Evidently passive objects do not collide with each other. For a collision between two objects to take place, at least one of the two objects must be active or bilateral rules between the two objects must exist so that they can collide.
We will set then all four objects to passive and introduce two bilateral collision rules:
The escapement should interact with the lever head. The knife should interact with the cam disk.
Through these rules, the two mechanisms will work de facto as if they were in three dimensions.
Escapement and Escapement Stone
The escapement and the escapement stone have also been formed as individual objects. The decisive factor was however another in this case. The tips of the escapement stones are the only parts of the escapement that interact with the escapement wheel. If we formed the escapement as a separate object then we would have a small speed advantage in the calculations because only the relatively simple border of the escapement stone against the contour of the escapement wheel, and not the whole form of the escapement would have to be tested during collision control. Because the escapement wheel itself is a very complex object, with a three-digit number of elements, this is not unimportant. The highest demands placed on calculations always occur when complex objects come into contact with one another.
The Propulsion of the Watch
In a mechanical watch the propulsion classically takes place through a spring system with a wind up which works a torque on a certain
Clockwork Mechanism
67
gear wheel in the wheels works. This torque is then passed along to all the gear wheels. At one end of this wheel system there are the indicators and at the other end the balance wheel as in our model. Since our model contains only one end of the gear works, that is, the balance wheel, we will apply a torque directly to the balance wheel. This corresponds in a functional sense exactly to reality. We are not making a mistake in principle by doing this. The balance wheel must have a torque applied to it. In reality it would be applied by the linked gear wheels and in our model it is applied directly to the balance wheel.
We will realize this torque by giving the object balance wheel a so-called external torque.
Torsion Spring of the Balance Wheel
In a real mechanical watch the balance wheel is connected to the casing by a torsion spring. In our model we will also attach the balance wheel to a xed point with a torsion link. A torsion link is a mathematical torsion spring that does not appear graphically in the model as a spring but nonetheless does not differ functionally from a real torsion spring. Physically, torsion springs operate in the following way: a relative twisting of the two objects taking part in the link causes a restoring torque that is proportional to the angle of the twist.
Torque = - c * Alfa (EQ 3)
The factor c is the spring constant of the torsion spring, Alfa is the relative angle of the twist between the two objects. If one of the two objects is a xed point then the relative angle between the two objects is simply the absolute value of the angle of rotation of the other object.
A torsion link fullls two functions then in the silux program. First, it links the two objects taking part, just like a normal link and secondly it exerts a torque that is proportional to the angle of rotation on the objects.
Clockwork Mechanism
68
The Building Together of the Watch
At the moment, the individual parts of the watch exist as nished objects and are ready to be mounted together.
Torsion Spring of the Balance Wheel
We want to attach the balance wheel to the planned xed point with a torsion link.
105. Select the xed point in the center of the balance wheel.106. Select the balance wheel.
Note that you always have two possibilities for selecting an object or a xpoint: you can do it in the drawing or in the List Tool.
107. Choose the command Create Torsion Link from the Construction Menu.
Lets take a look at the List Tool. There you should see exactly two links with exactly the same information, namely
1 o1 Balance wheel, f1 Fixpoint 2 o1 Balance wheel, f1 Fixpoint108. Double click with the mouse on the rst line of the Link-list in
the List Tool.
The Edit Link dialog box will be opened. Look at the eld with the name Link Type. The name Normal should be there. We are looking then at the normal link that attaches the balance wheel to the xed point.
Without having to leave the dialog box we can move directly to the next link: to the upper right of the dialog box you will see four arrow buttons for navigation. The arrow buttons allow you to switch to the rst, previous, next or last link.
109. Press the third button to jump to the next link.
Look again to the eld Link Type. This time the word torsion will be there. As mentioned previously, a torsion link consists of two
Clockwork Mechanism
69
separated links whose properties can be changed individually and independent of each other.
a normal link a torsion spring
It is exactly these two links in the list tool that are created with the command Create Link Torsion.
The link constant of the torsion link corresponds to the spring constant of the torsion spring. We assign it an appropriate value that needs either to be determined otherwise, calculated approximately or empirically determined. T