Embed Size (px)
Citation preview
Lecture 12 (Chapter 6)
Signals & Systems
Time and Frequency Characterization of
Signals and Systems
Adapted from: Lecture notes from MIT and Concordia University
Dr. Hamid R. Rabiee
Fall 2013
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems2
Magnitude and Phase of FT, and Parseval Relation
CT
Parseval Relation
dejXtx tj)(2
1)(
( )( ) | ( ) | j X jX j X j e
djXdttx 22 |)(|
2
1|)(|
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems3
Magnitude and Phase of FT, and Parseval Relation
DT
Parseval Relation
2
)(2
1][ deeXnx njj
)(|)(|)( jeXjjj eeXeX
2
22 |)(|2
1|][| deXnx j
n
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems4
Effects of Phase
• Not on signal energy distribution as a function of frequency
• Can have dramatic effect on signal shape/character
• Constructive/Destructive interference
• Is that important?
• Depends on the signal and the context
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems6
Log-Magnitude and Phase
)(tx H(jω) )(ty
|)(|.|)(||)(| jXjHjY
|)(|log|)(|log|)(|log jXjHjY
)()()( jXjHjY
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems7
Log-Magnitude and Phase
H1(jω)
|)(|log|)(|log|)(|log 21 jHjHjH
)()()( 21 jHjHjH
H2(jω)
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
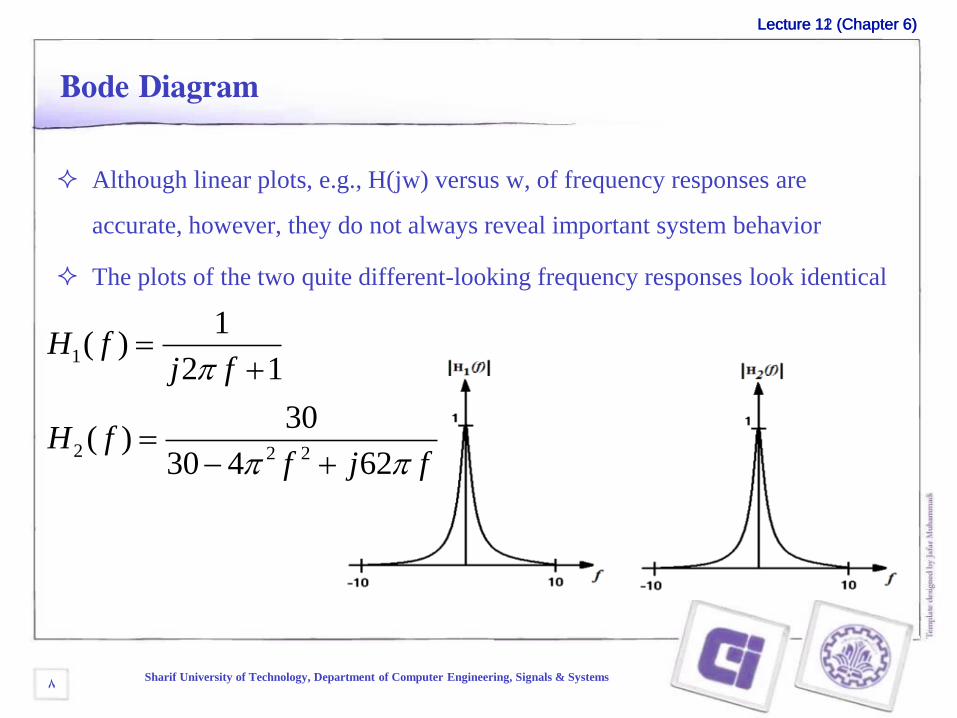
Bode Diagram
Although linear plots, e.g., H(jw) versus w, of frequency responses are
accurate, however, they do not always reveal important system behavior
The plots of the two quite different-looking frequency responses look identical
Sharif University of Technology, Department of Computer Engineering, Signals & Systems8
1
2 2 2
1( )
2 1
30( )
30 4 62
H fj f
H ff j f
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
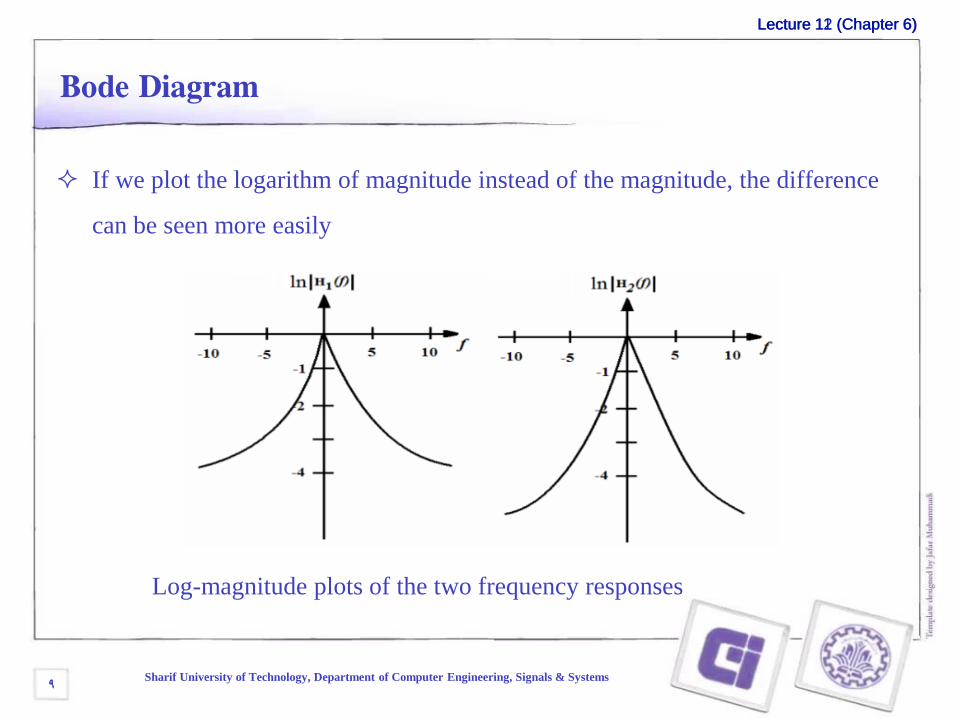
Bode Diagram
If we plot the logarithm of magnitude instead of the magnitude, the difference
can be seen more easily
Log-magnitude plots of the two frequency responses
Sharif University of Technology, Department of Computer Engineering, Signals & Systems9
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Bode diagram
A more common way of displaying frequency response is the Bode diagram or
Bode plot
A log-magnitude plot is logarithmic in one dimension
A Bode diagram is logarithmic in both dimensions
A bode diagram is a plot of the logarithm of the magnitude of a frequency
response against a logarithmic frequency scale
log |H(jw)| versus scaled w
In a bode diagram, |H(jw)| is converted to a logarithmic scale using the unit
decibel (dB)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems10
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems11
Plotting Log-Magnitude and Phase
• For real-valued signals and systems
Plot for ω ≥ 0, often with a
logarithmic scale for frequency
in CT
• In DT, need only plot for 0 ≤ ω ≤ π (with linear scale)
• For historical reasons, log-magnitude is usually plotted in
units of decibels (dB):
10powerinput
poweroutput decibels 10 bel 1
) )
) ( )
( (
(
H j H j
H j H j
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems12
Plotting Log-Magnitude and Phase
power magnitude
So… 20 dB or 2 bels
= 10 amplitude gain
= 100 power gain
2
10 10| ( ) | 20 | (10log
( 1 0
(
( 2
( 10 20
( 100 40
) |
)
) 2 ~ 3
) ~ 6
)
)
H j dB
H j
H j
H j
H j log H j
dB
dB
dB
H j dB
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems13
Plotting Log-Magnitude and Phase
power magnitude
So… 20 dB or 2 bels
= 10 amplitude gain
= 100 power gain
2
10 10| ( ) | 20 | (10log
( 1 0
(
( 2
( 10 20
( 100 40
) |
)
) 2 ~ 3
) ~ 6
)
)
H j dB
H j
H j
H j
H j log H j
dB
dB
dB
H j dB
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems14
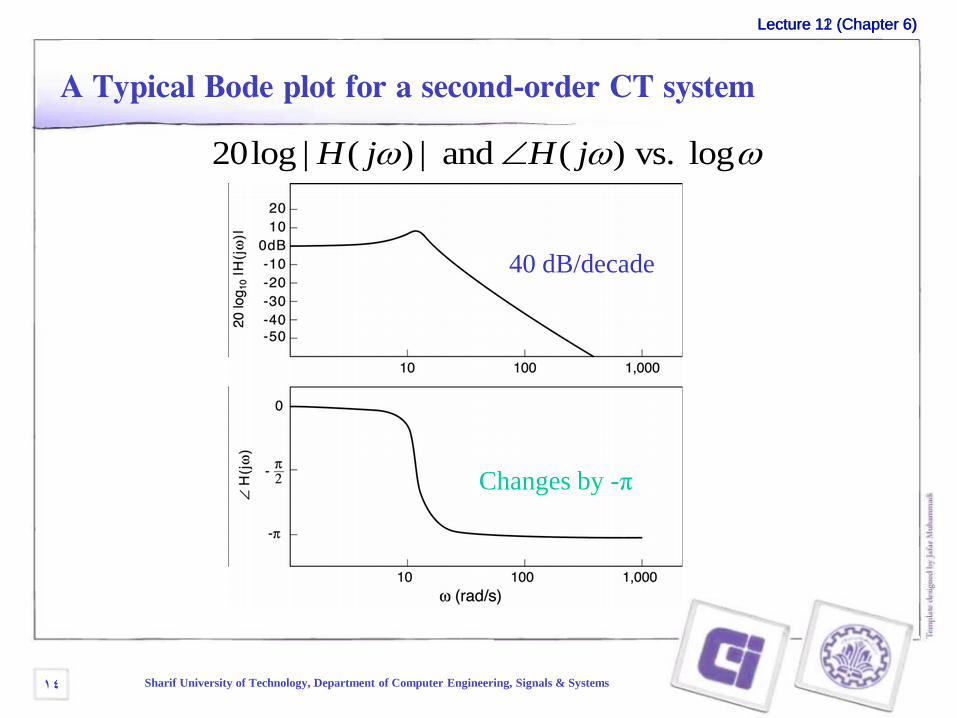
A Typical Bode plot for a second-order CT system
40 dB/decade
Changes by -π
| ( ) | and ( ) vs. log20log H j H j
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems15
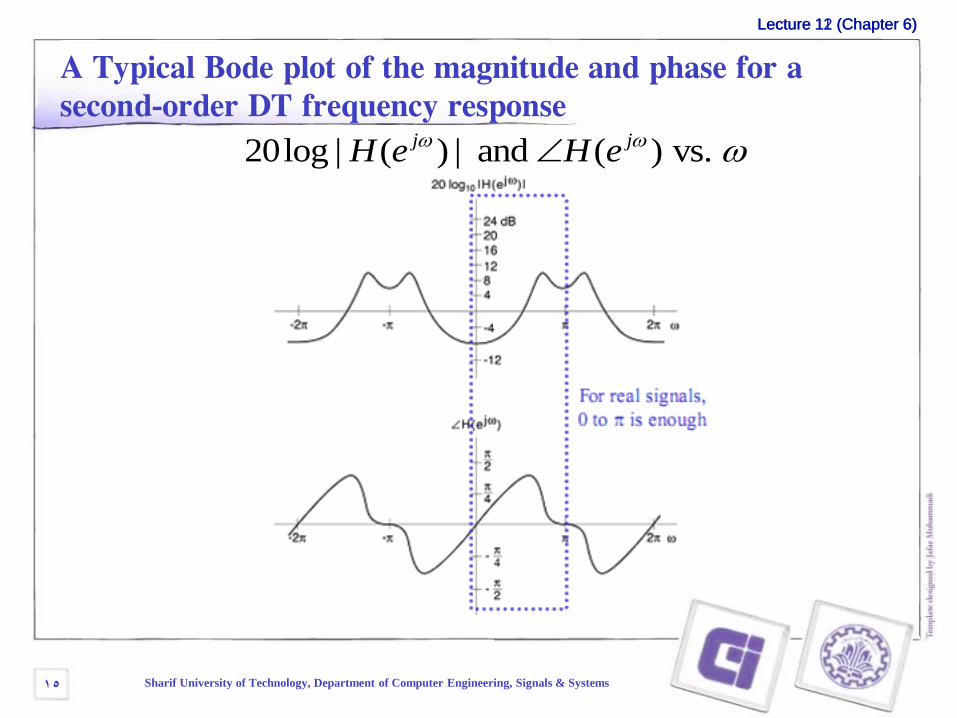
A Typical Bode plot of the magnitude and phase for a
second-order DT frequency response
| ( ) | and ( ) vs. 20log j jH e H e
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems16
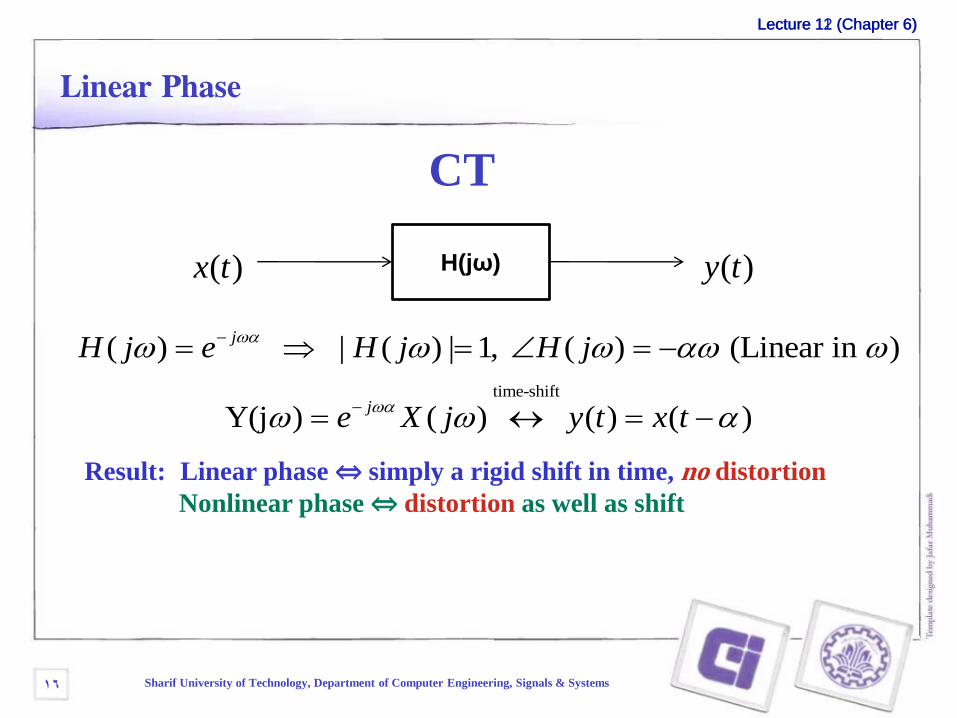
Linear Phase
CT
)(tx H(jω) )(ty
Result: Linear phase ⇔ simply a rigid shift in time, no distortion
Nonlinear phase ⇔ distortion as well as shift
time-shift
) | ( ) | 1, ( ) (Linear ( in )
Y(j ) ( ) (
( ) )
j
j
H j e H j H j
e X j y t x t
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems17
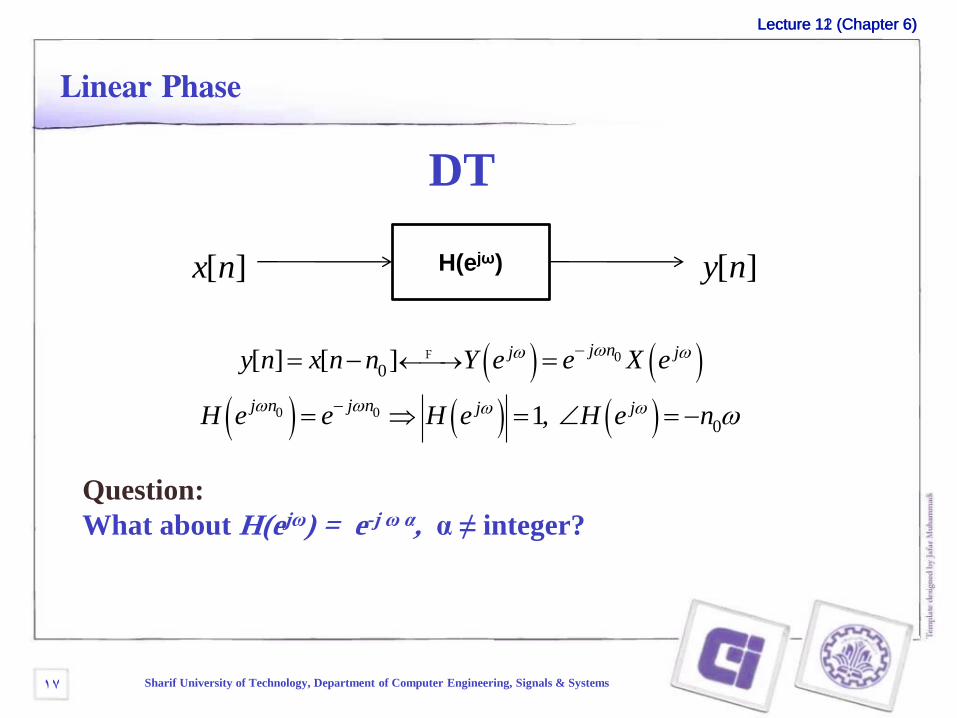
Linear Phase
DT
][nx H(ejω) ][ny
Question:
What about H(ejω) = e-j ω α, α ≠ integer?
0
0 0
0
0
[ ] [ ]
1,
j nj j
j n j n j j
y n x n n Y e e X e
H e e H e H e n
F
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems18
All-Pass Systems
CT1|)(| jH
2 2
2 2
( Linear phas
( ) Nonlinear phase
| ( )
)
|
ej
jH j
j
H
H j e
j
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems19
All-Pass Systems
DT1|)(| jeH
0
2 2
2 2
1 1 2.( ) Nonlinear phase
1 1 2.
(1 1 2.
( Linear
) (1 2. )| ( ) | 1
(1 1 2. ) (1 2.
) e
)
phasj
j
j
j
n
eH j
e
cos sinH e
cos sin
j eH
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems21
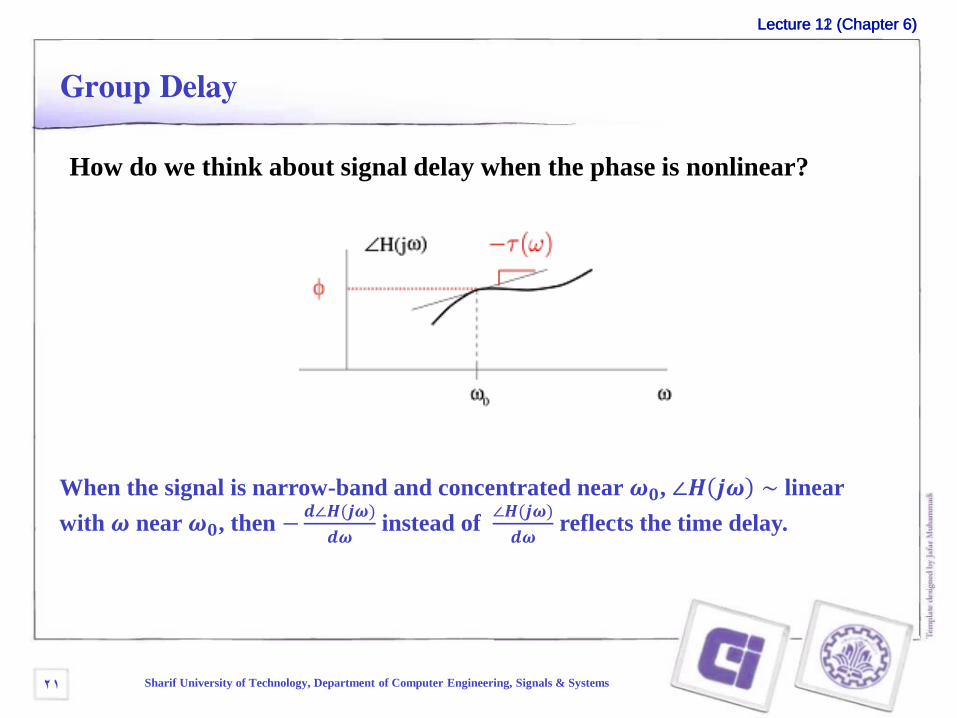
Group Delay
How do we think about signal delay when the phase is nonlinear?
When the signal is narrow-band and concentrated near 𝝎𝟎, ∠𝑯 𝒋𝝎 ∼ linear
with 𝝎 near 𝝎𝟎, then −𝒅∠𝑯(𝒋𝝎)
𝒅𝝎instead of
∠𝑯(𝒋𝝎)
𝒅𝝎reflects the time delay.
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Sharif University of Technology, Department of Computer Engineering, Signals & Systems22
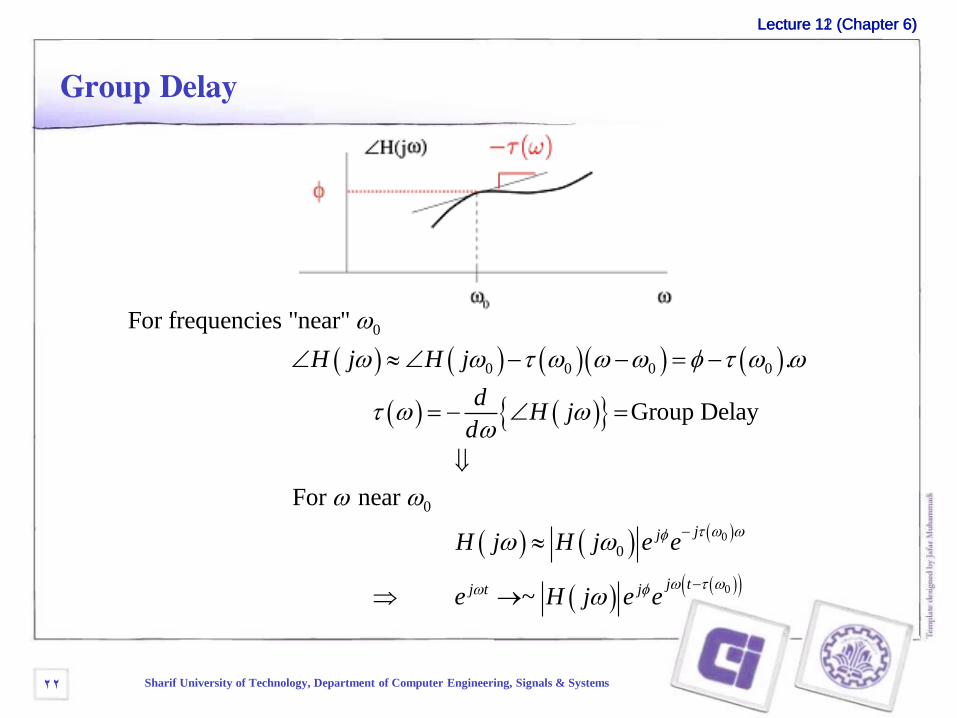
Group Delay
0
0
0
0 0 0 0
0
0
For frequencies "near"
.
Group Delay
For near
~
jj
j tj t j
H j H j
dH j
d
H j H j e e
e H j e e
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
Linear phase / Group delay
Group delay is a measure of the transit time of a signal through a system (or
device) versus frequency
Linear phase is a property of a filter
The phase response of the filter is a linear function of frequency
Linear phase filter has the property of the true time delay
A linear phase filter has constant group delay
All frequency components of a signal have equal delay times
There is no distortion due of select frequencies
A filter with non-linear phase has a group delay that varies with frequency,
resulting in phase distortion
Sharif University of Technology, Department of Computer Engineering, Signals & Systems23
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
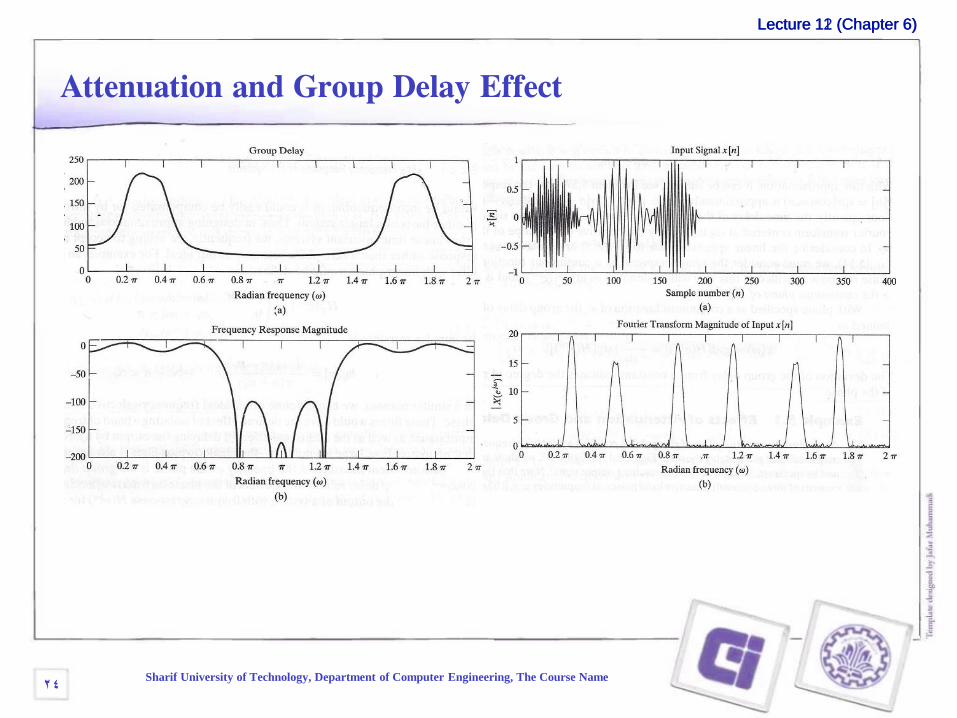
Attenuation and Group Delay Effect
Sharif University of Technology, Department of Computer Engineering, The Course Name24
Lecture 11 (Chapter 6)Lecture 12 (Chapter 6)
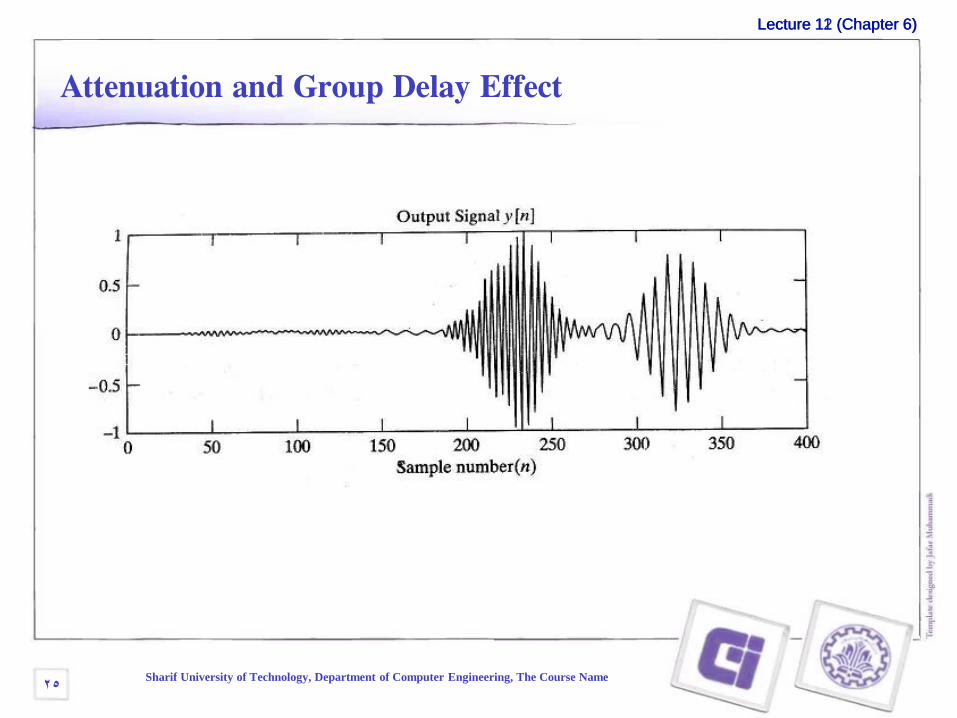
Attenuation and Group Delay Effect
Sharif University of Technology, Department of Computer Engineering, The Course Name25




















![Meelad Sharif [Urdu]](https://img.pdfslide.us/doc/110x75/577cb0ae1a28aba7118b45c7/meelad-sharif-urdu.jpg)






