Embed Size (px)
Citation preview
ARTICLE IN PRESS
0168-9002/$ - se
doi:10.1016/j.ni
�Correspondfax: +440 116 2
E-mail addr
Nuclear Instruments and Methods in Physics Research A 559 (2006) 814–816
www.elsevier.com/locate/nima
Signal processing for distributed readout using TESs
Stephen J. Smith�, Chris H. Whitford, George W. Fraser
Department of Physics and Astronomy, Space Research Centre, University of Leicester, Michael Atiyah Building, University Road, Leicester, LE1 7RH, UK
Available online 10 January 2006
Abstract
We describe optimal filtering algorithms for determining energy and position resolution in position-sensitive Transition Edge Sensor
(TES) Distributed Read-Out Imaging Devices (DROIDs). Improved algorithms, developed using a small-signal finite-element model, are
based on least-squares minimisation of the total noise power in the correlated dual TES DROID. Through numerical simulations we
show that significant improvements in energy and position resolution are theoretically possible over existing methods.
r 2006 Elsevier B.V. All rights reserved.
PACS: 07.85Fv; 95.55.Ka; 95.75.Pq
Keywords: Transition edge sensor; Optimal filter; Position-sensitive X-ray detector; DROID; Signal processing
1. Introduction
We are developing a position-sensitive Distributed Read-Out Imaging Device (DROID), consisting of TransitionEdge Sensors (TESs) at either end of a linear X-rayabsorber [1,2]. The energy E of an event is estimated fromthe weighted sum of the TES signals and the position x isinferred from the difference between the signals.
2. Optimised matched filtering
The development of position-sensitive TES detectorsrequires the use of specific signal processing algorithms toachieve optimum performance. We have developed optimalfiltering algorithms for optimised determination of E and x
in DROIDs [3]. These filters are calculated from a small-signal finite-element model to simulate numerically, thesignal and noise response of each TES. The noise in thedetector is described by a covariance matrix V
V ¼hjN1j
2i hN1N�2i
hN�1N2i hjN2j2i
!(1)
e front matter r 2006 Elsevier B.V. All rights reserved.
ma.2005.12.148
ing author. Tel.: +440 116 252 2650;
52 2464.
ess: [email protected] (S.J. Smith).
which includes the noise powers measured at each TEShjN1j
2i, hjN2j2i and the noise covariance hN1N2i, which
arises due to the coupling of the TESs via the absorber [4].Previously, the energy has been determined by adding
the TES signals and then applying a single optimal filter [5].The position has been found using the normalised energyratio of the two signals [6]. We have shown that thesemethods do not lead to the best resolution, particularly forposition [3]. The optimum solution requires applyingdifferent filters to each signal such that the total noisepower is minimised. In the frequency domain, the pulseshape is expanded as a Taylor series about an assumedposition x, and the w2 condition to minimise for two TESDROID [3] is
w2 ¼Z 1�1
½D�HðS þ dx S0Þ��TW ½D�HðS þ dx S0Þ�df
(2)
where the vectors D, S and S0 are two-element matricescontaining: data, signal responsivity, and derivative of S
with respect to x, for each TES. The weight matrix W isdefined as W ¼ V�1. H is the amplitude scalar representingthe photon energy E and dx is a position variable whichrepresents the difference between the actual interactionposition and the initially assumed position x. dx! 0 whenthe correct position is found. The superscripts T and * arethe matrix transpose and complex conjugate, respectively.
ARTICLE IN PRESS
0.6
0.4
0.2
-0.2
-0.6
0.0
-0.4
0 lPosition, x
Cor
rela
tion
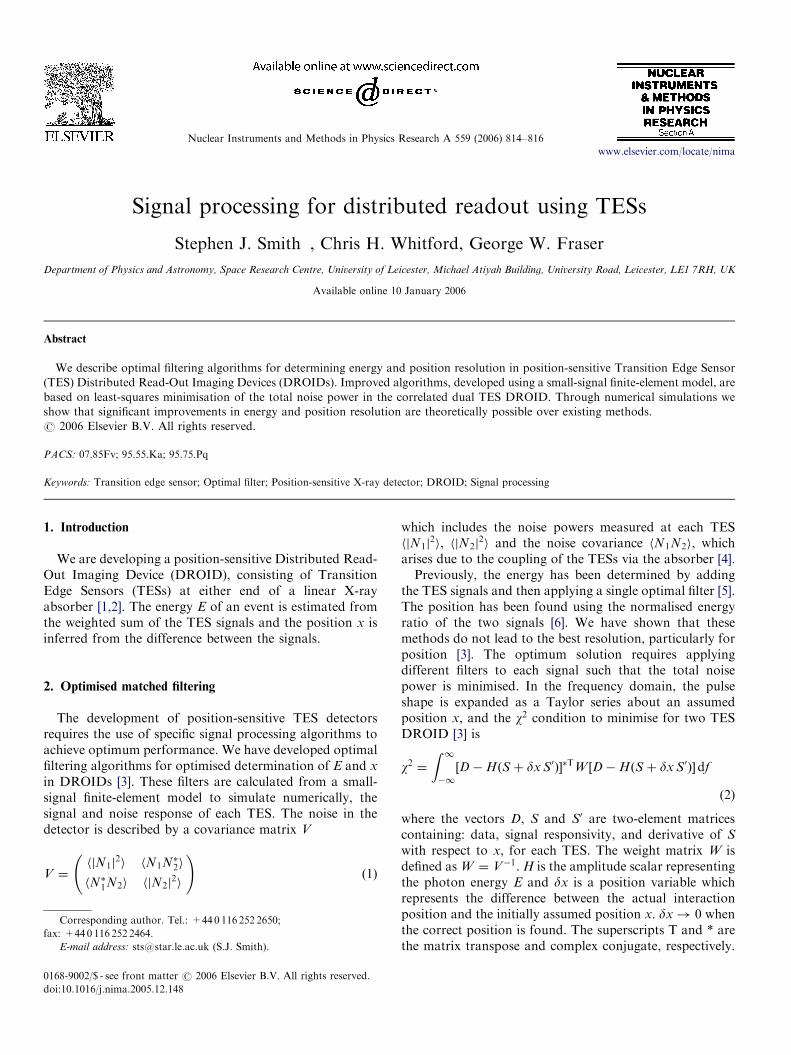
Fig. 2. Correlation r ¼ sHdx=ðDE DxÞ between H and dx across a typical
DROID. The two TESs are at x ¼ 0 and x ¼ l.
S.J. Smith et al. / Nuclear Instruments and Methods in Physics Research A 559 (2006) 814–816 815
Both H and dx are unknowns to be solved for to find E andx. The uncertainties on H and dx are correlated; thus, H
and dx must be solved for simultaneously. This is achievedby setting qw2=qH ¼ qw2=qdx ¼ 0 resulting in a pair ofsimultaneous equations for H and Hdx. This leads to theintroduction of the matched filter matrix FT ¼ S�TW ,which defines the weighted filters to apply to each signal.The energy and position resolutions (DE and Dx), arefound from the variance of H and dx, respectively. The full-width at half-maximum (FWHM) energy resolution is [3]
DE ¼ 2:355 ð4Y Þ�1Z 10
F 0TS0 df
� �1=2(3)
and the position resolution
Dx ¼ ð4E2Y Þ�1Z 10
FTS df
� �1=2(4)
where F 0 ¼ dF=dx and
Y ¼
Z 10
FTS df
Z 10
F 0TS0df �
Z 10
F 0TS df
� �2
. (5)
Using the same methodology, the covariance between H
and dx is
sH dx ¼ �ð4EY Þ�1Z 10
F 0TS df . (6)
Numerical simulations show that both DE and Dx will beworst at x ¼ l=2. The comparison carried out in [3,4] withprevious position and energy determination methods revealthat improvements in DE at the edge of the DROID arepossible (by a factor p
p2), over the method of applying a
single filter to the summed signals, the two methodstending to the same value at x ¼ l=2. Significant improve-
100.0
10.0
1.0
0.10 l
Position, x
Pos
ition
Res
olut
ion
(mic
rons
)
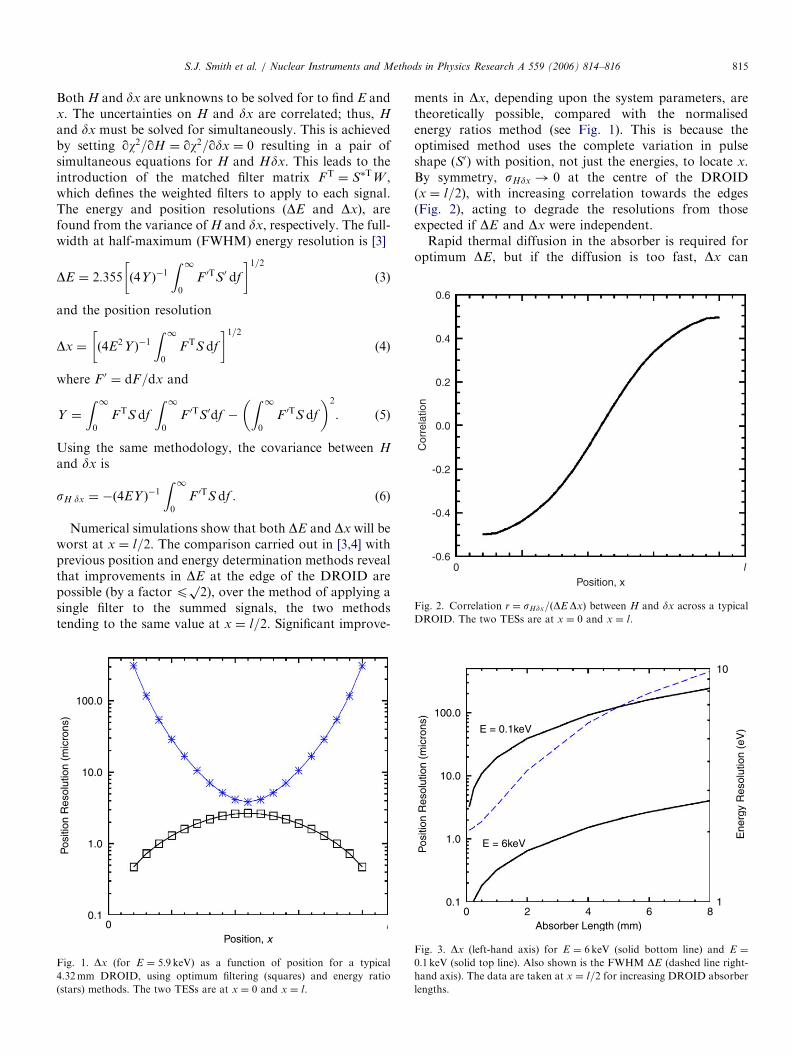
Fig. 1. Dx (for E ¼ 5:9 keV) as a function of position for a typical
4.32mm DROID, using optimum filtering (squares) and energy ratio
(stars) methods. The two TESs are at x ¼ 0 and x ¼ l.
ments in Dx, depending upon the system parameters, aretheoretically possible, compared with the normalisedenergy ratios method (see Fig. 1). This is because theoptimised method uses the complete variation in pulseshape (S0) with position, not just the energies, to locate x.By symmetry, sHdx ! 0 at the centre of the DROID(x ¼ l=2), with increasing correlation towards the edges(Fig. 2), acting to degrade the resolutions from thoseexpected if DE and Dx were independent.Rapid thermal diffusion in the absorber is required for
optimum DE, but if the diffusion is too fast, Dx can
100.0
10.0
10
1
1.0
0.10 2 4 6 8
Absorber Length (mm)
Pos
ition
Res
olut
ion
(mic
rons
)
Ene
rgy
Res
olut
ion
(eV
)E = 0.1keV
E = 6keV
Fig. 3. Dx (left-hand axis) for E ¼ 6 keV (solid bottom line) and E ¼
0:1keV (solid top line). Also shown is the FWHM DE (dashed line right-
hand axis). The data are taken at x ¼ l=2 for increasing DROID absorber
lengths.

ARTICLE IN PRESSS.J. Smith et al. / Nuclear Instruments and Methods in Physics Research A 559 (2006) 814–816816
become degraded. Both Dx and DE must therefore betraded against absorber length, since changing the absorberdimensionality will change the thermalisation time. Fig. 3shows DE and Dx at x ¼ l=2 for increasing DROID lengthsfor a semi-optimised configuration. Noting that Dx / 1=E,improvements in Dx for E40:1 keV are possible comparedto pixel arrays, where Dx is limited by pixel pitch(�250 mm), independent of E.
3. Conclusions
We have developed optimised matched filtering algo-rithms for energy and position determination in TESDROIDs and demonstrated by numerical simulation, thatsignificant improvements in Dx over existing methodolo-gies are theoretically possible. These findings mean that,potentially, longer DROIDs can be developed withoutcompromising performance.
The assumption in this analysis is that the correctmatched filters for each output signal are known.Practically, the calculation will require some iteration,since knowing the correct filters requires knowing x. Theposition will be estimated first using some non-optimum
algorithm. Using this estimate, an improved filter isselected from a family of pre-computed filters, which arederived from prior calibration or simulated data. This filteris then used to generate another estimate of x; furtheriterations may be required if this estimate is significantlydifferent from the original.This analysis provides an important tool for the
optimisation of DROIDs for specific detector applicationssuch as XEUS [7] or X-ray interferometry [8]. Furthertesting on real and simulated data is required to developefficient algorithms for practical implementation.
References
[1] S.J. Smith, et al., Nucl. Instr. and Meth. A 520 (2004) 449.
[2] S.J. Smith, et al., Characterisation and modelling of transition edge
sensor distributed read-out imaging devices, Nucl. Instr. and Meth. A
(2006), in press, doi:10.1016/j.nima.2005.12.175.
[3] S.J. Smith, et al., Nucl. Instr. and Meth. A 556 (2006) 237.
[4] S.J. Smith, Ph.D. Thesis, University of Leicester, 2006.
[5] E. Figeroa-Feliciano, Ph.D. Thesis, Stanford University, 2001.
[6] S. Trowell, et al., AIP Conf. Proc. 605 (2002) 267.
[7] A.N. Parmar, et al., Proc. SPIE 5488 (2004) 388.
[8] R. Willingale, Proc. SPIE 5488 (2004) 581.





























