Embed Size (px)
Citation preview

SIFT Playbook and m:N
Control Overview
For other staff and projects, please see
http://www.sift.net
Smart Information Flow Technologies
Dr. Phillip [email protected]
26 March 2021

Smart Information Flow Technologies
2
• 35-person small business• 18 years in business.
• $7M+ per year in revenues.
• Distributed throughout U.S.• Based in Minneapolis.
• Branches in DC, Boston, Dallas, San Diego, San Francisco.
• R&D expertise:• 35 advanced degrees (Computer Science,
AI, Psychology, Control).
• 150+ years combined industrial R&D experience.
• Research spanning computer science, human centered systems, and beyond.
• Customers: DARPA, NASA, AFRL, ONR, ARL, OSD, NIST, AFOSR, Lockheed, BBN, BAE Systems…
Downtown Minneapolis
Lexington, MA
26 March 2021

26 March 2021 3
How do you manage complex Agent(s)?Supervisory control: how humans achieve effective, scalable control of complex, heterogeneous agents
➢ By giving up some decision and execution tasks and, instead, “controlling” at a higher level
➢ Long history in Control since Sheridan and Verplank, 1978.
Delegation: How humans perform/achieve supervisory control (aka Training, Instructing)
1. Goal (partial state) to be achieved
2. Plan (action sequence) to be
performed
3. Constraints (states or actions) to be
avoided
4. Stipulations (actions or states to be
achieved)
5. Value statement on states and
actions
Supervisor Method
Subordinate Responsibility
Goal Achieve goal if possible; report if incapable
Plan Follow plan if possible; report if incapable
Constraint Avoid actions/states if possible; report if not
Stipulation Achieve actions/states if possible; report if not
Value Statement
Work to optimize value

4
A Playbook® Approach to Delegation
• A means of Delegation
• Require a shared knowledge of
domain Goals, Tasks and Actions
• Supervisor calls plays; Agents
have autonomy within the play’s
scope
• Plays reference a defined range
of plan/behavior alternatives
• Supervisor can further
constrain/stipulate/compose
• Delegation by goals/plans
/constraints/values
• “Service Requests” are like plays,
but without full command
authorityA page from Alonzo Stagg’s 1927 Playbook
426 March 2021

Playbook® Reference Architecture
Analysis &
Planning
Component
Algorithms
Control
Instructions
Feedback
Shared Task Model
Playbook UI
Vehicle(s)
Special Purpose Planners(e.g., Route, Sensor)
Pla
yb
oo
k®
Pro
per
Execu
tio
n
En
vir
on
men
t
Executive
Incoming Data
Streams
Playbook balances and integrates Planning, Execution and Human-
Autonomy Interaction
526 March 2021

15+ years of Playbook-Related Work
6
• Ground-based UAV mission planning Tactical Mobile Robots--DARPA
• Mixed Initiative Control of Automateams(MICA)--DARPA
• Playbook-enhanced Variable Autonomy Control System—DARPA SBIR
• Teamed with Geneva Aerospace• Heterogeneous UAVs; MOUT Surveillance
• TUSC—AFRL SBIR• Air Force recon and surveillance missions, MIIIRO
testbed integration
• PUMA– NRL SBIR• Heterogeneous Naval UAVs UI enrichment
• Army USI– AFDD task order• Develop Army Air-controlled demo
• HURT (SIFT Personnel at Honeywell)--DARPA• Persistent goal management; service requests• Flight demo– managed 6 heterogeneous UAVs to satisfy
imagery requests for 6 soldiers with dynamic no-fly zones
• Levels of Automation3--Army SBIR• Integrated persistent goal management into PB• Extensive human experiments in MUSIM testbed• Army air-ground flight demo
• FLEX-IT—AFRL Task Order• Multi-modal PB concepts, UIs and demos for
Predator/Reaper
• IMPACT ARPI– Joint Autonomy Research
Multi-UAV simulation (3)Touch/Sketch/
MultiTouch Gesture
HOTAS(Hands On
Throttle & Stick)
HOKAM(Hands On Keyboard & Mouse)
Audio Outout/ Speech Input
TSD
UAV Video Outpu
t
A FLEX-IT Workstation
626 March 2021

Levels of Automation3
7
NUGGET: Development and experimental exploration of Playbook concept for multi-UAS (6+) supervisory control
APPLICATION:
• Developed Playbook®
implementations in MUSIM testbed
• Extensive Experimental Validation (including workload and breakdown conditions)
• Flexible plays:• Reduce Wx (esp. on secondary tasks)
• Enhance RT and SA
• Are NOT susceptible to automation complacency and error effects
STATUS:
• 2.5 years SBIR funding (Ph1&2)
• 2 related flight demonstrations (RT-Max) by US Army AFDD
• Ongoing use AFRL’s FLEX-IT and AFDD’s DelCon
From Fern & Shively, 2009
26 March 2021

FLEX-IT
8
NUGGET: A demonstrator testbed for HCI concepts using flexible delegation and play calling for multiple Unmanned Vehicles
APPLICATION:
• Emphasis on Flexibility– user can “call plays” at any level, can manually fly, can interrupt and resume, can tune and tweak parameters, etc.
• Multi-modal: Voice I/O, touch, sketch, HOTAS
• Multiple novel UI and Human Automation Interaction concepts
• E.g., Noodle: a “fly ahead” capability using HOTAS
STATUS:
• 3 years AFRL funding
• Migrated to Vigilant Spirit
• Ongoing use on IMPACT ARPI
Multi-UAV simulation (3)Touch/Sketch/
MultiTouch Gesture
HOTAS(Hands On Throttle &
Stick)
HOKAM(Hands On
Keyboard & Mouse)
Audio Outout/ Speech Input
TSD
UAV Video Output
A FLEX-IT Workstation
Manual: Convention
al “hands-
on-throttle-
and-stick”control.
Higher Level
Plays: Pilot’s verbal
commands
initiates a
planning
interaction with
automation &
then automates
execution steps.
Maneuver
Plays: Pilot’s
verbal
command
initiates
short,
simple
maneuver.
“Noodle”: Pilot’s
inputs on
stick &
throttle
defines
UAS’s near
future path.
HOTAS
“Hook Left”
Multiple, Composable Methods of Control
26 March 2021

Playbook from FLEXIT to OFFSET
9
FLEX-IT, AFRL,
2010-2013
IMPACT ARPI,
AFRL, 2014-2016
CODE, DARPA,
2015-2017
ISHIS SBIR, ONR,
2016-
OFFSET, DARPA,
2017-
Multi-UAV simulation (3)
Touch/Sketch/ MultiTouch Gesture
HOTAS(Hands On Throttle
& Stick)
HOKAM(Hands On Keyboard &
Mouse)
Audio Outout/ Speech InputTSD
UAV Video Output
A FLEX-IT Workstation
26 March 2021

CODE Program Overview
• … extend mission capabilities and improve U.S.
forces’ ability to conduct operations in denied or
contested airspace
• …create a modular software architecture beyond
the current state of the art
CODE intends to focus in particular on developing and demonstrating improvements in collaborative autonomy—the capability of groups of UAS to work together under a single person’s supervisory control
…develop the operational concepts for CODE-enabled missions and validate their effectiveness through detailed modeling and simulation. It also intends to develop the most promising capabilities and demonstrate them in flight using multiple surrogate UAS
Distribution Statement A Approved for Public Release, Distribution Unlimited
SIFT RolePh1– a Track B performer creating a holistic user interface for pre-mission planning and in-mission communication and SA– even in comms denied environmentsPh2 & 3– subcontracted to Lockheed providing planning and plan evaluation UI aid
Map Display
Play Creator
Alternate Plan Evaluator
1026 March 2021
11
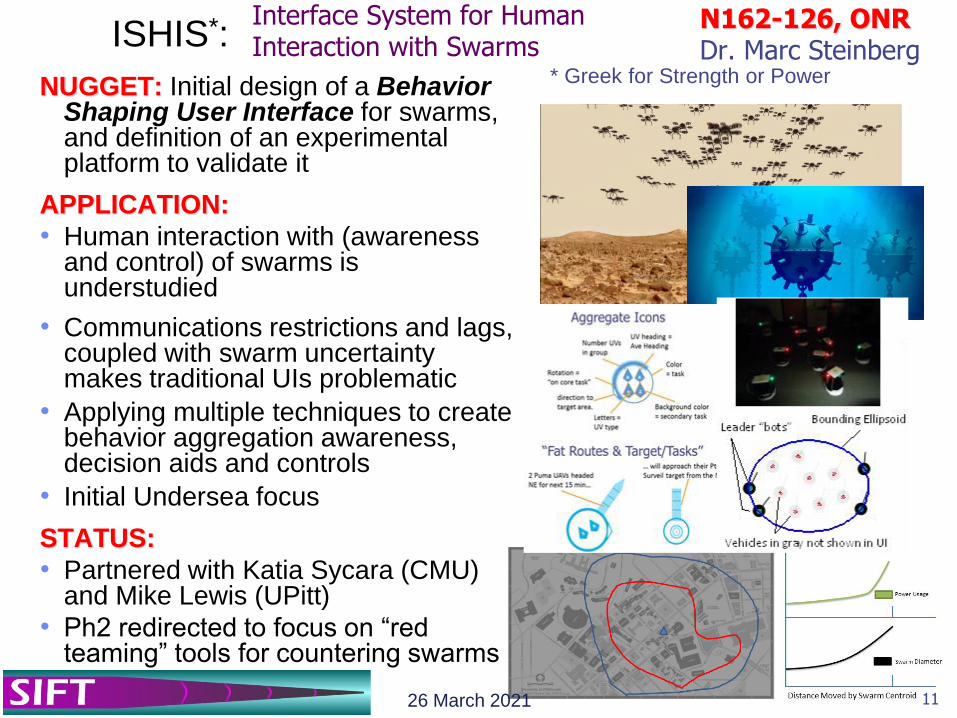
ISHIS*:
NUGGET: Initial design of a Behavior Shaping User Interface for swarms, and definition of an experimental platform to validate it
APPLICATION:
• Human interaction with (awareness and control) of swarms is understudied
• Communications restrictions and lags, coupled with swarm uncertainty makes traditional UIs problematic
• Applying multiple techniques to create behavior aggregation awareness, decision aids and controls
• Initial Undersea focus
STATUS:
• Partnered with Katia Sycara (CMU) and Mike Lewis (UPitt)
• Ph2 redirected to focus on “red teaming” tools for countering swarms
* Greek for Strength or Power
Interface System for Human Interaction with Swarms
N162-126, ONRDr. Marc Steinberg
26 March 2021
12
PINNA:
NUGGET: Review Playbook concepts and suggest applicability for UAS in the NAS design, regulation and experimentation
APPLICATION:
• Near term commercial application scenarios (sustained monitoring)
• Larger scale cargo and passenger scenarios
• Pilot/operator focus but exploring interaction with ATC and Dispatch
• Leveraging prior NASA work on Detect & Avoid and Maintain Well Clear
STATUS:
• 6 month initial effort, 2&3Q 2018
• Articulated play concepts
• Demoed “listening in” for plan inferencing
NASA ARCDr. Jay Shively
Playbook Interactions for Non-Piloted vehicles in the National Airspace
https://www.youtube.com/watch?v=piVjsLPqitA26 March 2021

“Displaced Transparency”
• The dilemma of transparency is not new… and not limited
to human-machine interactions
• Human organizational solution is Displaced Transparency
• Much human work interaction with human partners involves
delegation of intent:
13
“Displaced Transparency” = Relaying transparent information “displaced” (in
time or distance) from the LOCA
• All about conveying one’s mindset/intent to another mind
• Entails communication of intent via language, symbols, procedures, priorities,
• Implies oversight and correction• But “mind melds” take time… how do we
accomplish it efficiently and avoid errors?
26 March 2021

Transparency across Temporal Spans
14
minshrsdayswksmos mins hrs days wks mos
Action
“Normal” Transparent UI Usage Window
Negotiation about:
• Intent
• Plans
• Policies
• Design
Discussion about:
• Explanations
• AARs
• “Tuning”
Before Future Action After Past Action
26 March 2021

Why does it work?
• Q: What is it about transparency, planning, intent
communication, trust and debriefing that make them all
pertinent to improved human-automation teaming?
• A: It’s all about mental model synchronization through
negotiation (or having negotiated, and trained)
• That can happen in the moment of need…
• But it doesn’t HAVE to…
• …and it’s probably best not to leave it until then if you can avoid it
• …And frequently, you can.
15
That’s why high performing teams interact less, and less explicitly1
That’s why debriefings are such a highly effective strategy for team development2
That’s why plans are nothing but planning is everything2
That’s why plays work in all the ways they do
That explains multiple trust effects4
1Entin & Serfaty, 19992Tannenbaum & Cerasoli, 2013
3Eisenhoser, 19574Lee & See, 200426 March 2021

Some n:M Lessons Learned
• Flexibility is key:
• As flexible as you want it to be; as automated as you need it.
• But there will be dual temptations:
• To use precise control and focus where one shouldn’t
• To rely on and expect automation where one shouldn’t
• As multi-agent systems become more complex, working
out problems in real-time becomes less tenable.
• “Displacing Transparency” to planning, policy, mental model
sharing, negotiation and after-action review
1626 March 2021

Contact Information
www.sift.net
17
Dr. Phillip [email protected]
Dr. Christopher [email protected]
26 March 2021

OFFSET : I3
For other staff and projects, please see
http://www.sift.net
Smart Information Flow Technologies
Josh [email protected]
26 March 2021
Table of Contents
19
26 March 2021
• Program Description
• OFFSET vs m:N
• Immersive Interactive Interface
• Support for Scale
• Lessons Learned
• Q&A

OFFSET : Program Description
20
26 March 2021
• OFFensive Swarm-Enabled Tactics
• Heterogenous composition
• Up to 250 platforms
• Urban operations
• Twice yearly exercises at MOUT/CACTF facilities, real hardware, representative scenarios
• Final program phase
(DARPA)

• Single Operator vs Multiple
• Magnitude of platforms per operator
• ISR, mock engagement
• Tolerant to platform failure/loss
Contrast m:N
21
26 March 2021
(DARPA)

OFFSET : SIFT
22
26 March 2021
• Working under CCAST
(BBN Raytheon)
integration team, with
OSU
• I3 – Immersive
Interactive Interface
• Multimodal
• “Near the battle”
• Control at varying levels
of aggregation
(DA
RP
A)

I3 Architecture
23
26 March 2021
• Unity application, VR / Windows 10• Valve Index
• I3 consumes telemetry, world state; issues tactics and commands
Platform
State
Object
Recog.
‘Comms’
Artifacts
Swarm
Commands
World Models
Scenario Information
Tactic Specifications
Initial Geometries
I3 User
STOMP
Dispatcher
Sprinter/Ext
Eval Server
Real/Virtual
Platforms
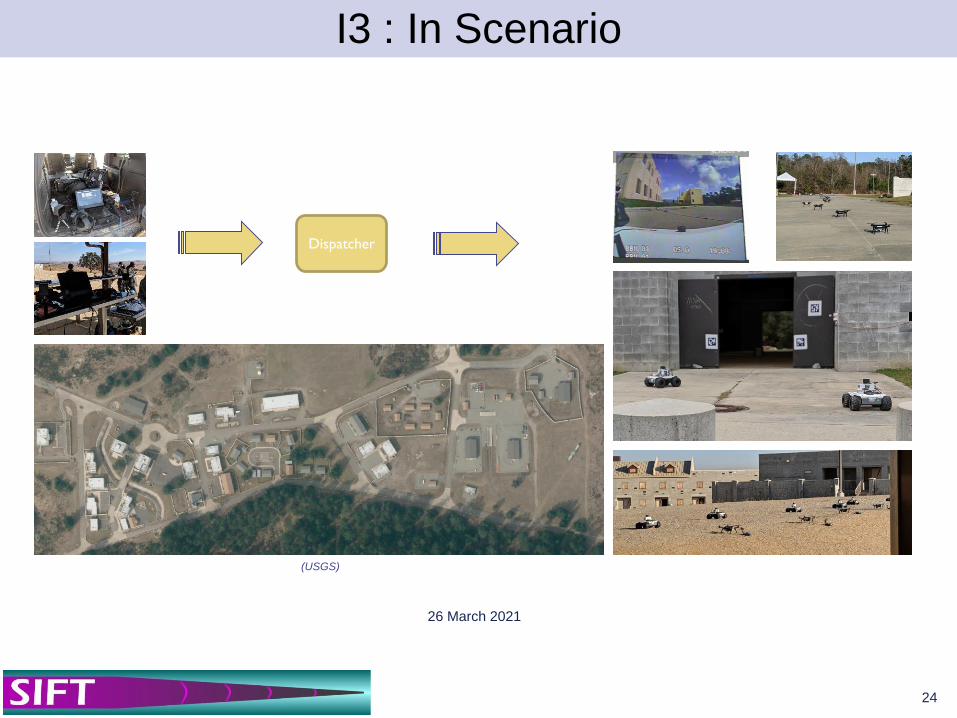
I3 : In Scenario
24
26 March 2021
Dispatcher
(USGS)

I3 : Visualization
25
26 March 2021
World Model
Mission Plan, Scenario Status
Platforms : Status, Tactics, Groups
Artifacts
Inspection Tools

• Controllers
• Object inspection, selection, designation
• Haptic feedback
• Gesture Recognition
• Speech
• Tactic Invocation
• Mission Plan Control
I3 : Control
26
26 March 2021

Support For Scale
27
26 March 2021
• Mission Plans
• Swarm Level Interaction
• Intelligent Automation

Lessons Learned
28
26 March 2021
• Emphasize higher levels of automation and aggregation
• Design to discourage low level interactions
• Resilient (and/or adaptive) behavior w.r.t. comms
• Automation backplane support (authority)
• Highlight goals and tasks
• Real world is messy

Questions?
29
26 March 2021
?







![Loglet SIFT for Part Description in Deformable Part … BHALERAO: LOGLET SIFT FOR ... Loglet SIFT for Part Description in Deformable Part Models: Application to Face ... [10], a set](https://img.pdfslide.us/doc/110x75/5b1d78377f8b9a8e158b84a0/loglet-sift-for-part-description-in-deformable-part-bhalerao-loglet-sift-for-.jpg)






















![Multiview Active Shape Models with SIFT Descriptors · Multiview Active Shape Models with SIFT Descriptors ... [21]) is introduced that uses a form of SIFT descriptors [68]. ... 3.8](https://img.pdfslide.us/doc/110x75/5b4cc1987f8b9a9a408bc433/multiview-active-shape-models-with-sift-multiview-active-shape-models-with-sift.jpg)