Embed Size (px)
Citation preview

Ministry of Higher Education And Scientific Research Al-Nahrain University College of Science
On
The Volume And Integral Points Of A polyhedron In nR
A Thesis Submitted to the Department of Mathematics and Computer Applications/College of Science/ Al- Nahrain University In Partial Fulfillment of the Requirements For the Degree of
Doctor of Philosophy in Mathematics
By
Shatha Assaad Salman Al-Najjar
(B.Sc., 1991) (M.Sc., 1995)
Supervised by
Dr. Adil G. Naoum and Dr.Ahlam J. Khaleel
July 2005

ا د اح اا ل
nℜ
رت وت طت"#" ا! ا #&
ط(54 "ن 12ء" ا/. - ج /ا(م*(/ا()بت 7 2راه ر ل7 ا
8& -" ا(ر>;ى أ (ن
(١ ٩ ٩ ١ / ا" ا2/ج/2(رس =(م5 ) (١ ٩ ٩ ٥ / ا" ا2/ج/"ج =(م )
5> اف
أA ج8 @(8 .د ن /و و B8د د.=
ي ٢٠٠٥تز H)١٤٢٦ ا
ا(&Mوزارة ا( ا وا /. -" اج
ا(مک

Abstract
Computing the volume and integral points of a polyhedron in
nℜ is a very important subject in different areas of mathematics.
There are two representations for the polyhedron, namely the H-representation and the V-representation. For each representation we give a different method of finding the volume and number of integral points.
Moreover, the Ehrhart polynomial of a bounded polyhedron is
discussed with some methods for finding it. One of these methods is modified and we prove two theorems for computing the coefficients of the Ehrhart polynomial.
Also, a modified method for counting the number of integral
points of a bounded polyhedron is given, and it makes matrix operations on the matrix that represents the bounded polyhedron, and studies the effect of these operations on these numbers.
All of the used methods are demonstrated with different
examples.

Introduction A wide variety of pure and applied mathematics involve the problem of counting the number of integral points inside a region in space. Applications range from the very pure: number theory, toric Hilbert functions, Kostant's partition function in representation theory, Ehrhart polynomial in combinatorics to the very applied: cryptography, integer programming, statistical contingency, mass spectroscope analysis. Perhaps the most basic case is when the region is a convex bounded polyhedron. Convex polyhedra, i.e., the intersections of a finite number of half spaces of the space dℜ , are important objects in various areas of mathematics and other disciplines as seen before. In particular, the compact ones among them (polytopes), which, can equivalently be defined as the convex hulls of finitely many points in
dℜ , have been studied since ancient times, for example, platonic solids, diamonds, the great pyramids in Egypt etc., [27]. polytopes appear as building blocks of more complicated structures, e.g. in combinatorial, topology, numerical mathematics and computed aided designs. Even in physics polytopes are relevant e.g., in crystallography or string theory, [31]. Probably the most important reason of the tremendous growth of interest in the theory of convex polyhedra in the second half of 20'th century was the fact that linear programming i.e., optimizing a linear function over the solutions of a system of linear inequalities became a wide spread tool to solve practical problems in industry and military. Dantzig's simplex algorithm, developed in the 40's of the last century, showed that geometric and combinatorial knowledge of polyhedra (as the domains of linear programming problems), is quite helpful for finding and analyzing solution procedures for linear programming problems, [31]. Since the interest in the theory of convex polyhedra to a large extent comes from algorithmic problems, it is not surprising that many algorithmic questions on polyhedra rose in the past, but also inherently, convex polyhedra (in particular: polytopes) give rise to algorithmic questions, because they can be treated as finite objects by definition; this makes it possible to investigate the smaller ones among them by

computer programs like the polymake - system written by Gawilow and Jowing, [24].
Once chosen to exploit this possibility one immediately finds oneself confronted with many algorithmic challenges.
Also, the notion of the volume of a polytope is basic and intuitive; its computation has raised a lot of problems. In this thesis we attempt to answer some fundamental and practical question on volume computation of higher dimensional convex polytopes given by their vertices and / or facets. In particular, we study through extensive computational experiment typical behavior of the exact methods, including Delaunay and boundary triangulation, the triangulation scheme described by Cohen and Hickey and the methods presented by Lawrence, [13].
This thesis consists of three chapters. In chapter one we try to give a short introduction, provide a
sketch of what bounded polyhedron looks like and how they behave with many examples. Also we recall some methods for finding the number of integral points inside a convex polytope, [13], [25] and [4].
In chapter two we present some methods for computing the
coefficients of Ehrhart polynomial that depend on the concepts of Dedekind sum and residue theorem in complex analysis. Also, a method for counting these coefficients is introduced. The polytope that we take are with V-representations, [5] and [60]. We give a method for computing the coefficients of the Ehrhart polynomial, 3−dc ,
4−dc until 9−dc also we give a formula for the differentiation of the given method.
In chapter three, a method for finding the volume of H-
representation of a polytope using Laрlace transform is presented and some basic concepts and remarks about the Birkhoff polytope and their volumes are discussed with their Ehrhart polynomials, [33], [11], [7], [8] and [9]. We make a change on the matrix, which represents the polytopes and finds a general formula for the number of integral points; also we make a change of matrix operation and study the effect of this change on the number of integral points of the polytopes. To the best of our knowledge, this result seems to be new.

List of symbols
ℜ the set of all real numbers. Ζ the set of all integers. dℜ the vector space of d-dimension. dm×ℜ an dm× real matrix. dΖ the standard integer lattice. d
+ℜ d-space of vectors with positive components. Vol(P) volume of P. ext(P) extreme points of P. x greatest integer ≤x.
x least integer ≥ x.
νo(P) Voronoi cell of p. nb(S,v) nearest neighbor set of v in S. conv(nb(S,v)) Delaunay cell of v. dP ΖI number of integral points of a polyhedron.
2Ζ∂ IP number of integral points on the boundary of the
polyhedron. ),( pxδ delta function of x and p.
x the Euclidean norm of a vector x.
rank(A) rank of the matrix A. dim(P) dimension of the polytope P.
),...,,( 10 dvvv∆ simplex in dℜ with vertices d
dvvv ℜ∈,...,, 10 . ),...,det( 001 vvvv d −− determinant of dd × matrix whose columns
are 001 ,..., vvvv d −− .
ipP U+
= signed union of ip .
∏=
n
i
ix1
multiplication symbol of n
xxx ,...,,21
.
L(P,t) the Ehrhart polynomial of a polytope P. S(a,b) the Dedekind sum of a and b. Res(f(z), z=a) residue of f(z) about z = a.

),(1 nmS Stirling number of the first kind. ),(2 nmS Stirling number of the second kind.
Ζ∈
Ζ∉−−=xif
xifxxx0
2
1))((
oP interior of a polytope P.
nB Birkhoff polytope. ( )tHn Ehrhart polynomial of the Birkhoff polytope.
int |Z| = r interior of the circle |Z| = r.

Contents Abstract List of symbols Introduction Chapter One Preliminaries. 1. Representation of polyhedron. 2 2. Some methods for volume computation of a polytope. 5 1.2.1 Triangulation methods 6 1.2.2 Signed decomposition method 11
3. Methods for computing integral points. 13
Chapter Two Computing the Volume and Integral Points of V-representation of a Polytope Using
Ehrhart Polynomials. 1. Basic concepts about Ehrhart polynomials. 18 2. Counting integral points using Dedekind sums. 20 3. Counting integral points using residue theorem. 25 4. The Ehrhart coefficients. 29 5. Computing 3−dc and 4−dc in the Ehrtart polynomial. 37 6. General formula for the differentiation of h and J,...,J,J,I d21 .52
Chapter Three The Ehrhart Polynomial of H-representation of a Polytope.
1. Computing the volume of a convex polytope using Laplace 59 transform. 3.1.1 The direct method. 61
3.1.2 The indirect method. 65 2. Some basic concepts about Birkhoff polytope. 68 3. The Ehrhart polynomial of a Birkhoff polytope. 70 4. The effect of matrix operations on the number of integral points. 77
References 92
Chapter One Preliminaries

Introduction
Convex bounded polyhedrons are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their importance for many other mathematical subjects, ranging from the integration theory, algebraic topology, and algebraic geometry (toric varieties) to the linear and
combinatorial optimization.
In this chapter we try to give a short introduction and provide a sketch of what bounded polyhedron looks like and how they behave
with many examples.
A convex polyhedron is an intersection of a finite number of half spaces of the space dℜ , and a convex polytope is a bounded convex polyhedron. Every convex polyhedron has two natural representations, a half space representation (H-representation) and a vertex representation (V-representation). In recent years various techniques of geometric computations associated with convex polyhedron have been
discovered, see [13], [31], [16] and [17].
Also, we recall some methods for finding the volume of a convex polytope and other methods for finding the number of integral points
inside a convex polytope.
This chapter consists of three sections:
In section one, some basic definitions with some useful remarks about representation of the polyhedron are presented.
In section two, some methods for computing the volume of convex polytopes are given with some illustrative examples. These are classified into two groups: triangulation methods and signed
decomposition methods.
The triangulation methods include boundary triangulation, Delaunay triangulation and Cohen & Hickey's triangulation, [13]. The
signed decomposition methods include Lawerence's method, [25]. In section three, some methods for finding the number of integral
points of a convex polytope are discussed; these methods are demonstrated with some examples.

1.1 Representation of a polyhedron
The volume of a convex bounded polyhedron is not easy to compute and the basic methods for exact computation of this volume can be classified according to whether a half space representation or a vertex representation of it, [33]. Therefore, in this section some basic definitions on a convex bounded polyhedron and its representations are given.
We start this section by the following definitions:
Definition (1.1.1), [35, p.85]:
Let bAX ≤ where dmA ×ℜ∈ is a given real matrix, and mb ℜ∈ is a
known real vector. A set : bAXXP d ≤ℜ∈= is said to be a
polyhedron.
A polyhedron P is bounded if there exists 1
+ℜ∈ω such that ω≤X for
every PX ∈ , [35, p.86].
Definition (1.1.2), [35, p.85]: Every bounded polyhedron is said to be a polytope.
Definition (1.1.3), [35, p.84]:
Let ,...,, 21 kxxxS = where d
ix ℜ∈ , ki ≤≤1 , then S is said to be
affinely independent if the unique solution of 01
=∑=
i
k
i
i xa and
01
=∑=
k
i
ia is 0=ia , for i = 1, …, k.
Recall that a polyhedron P is of dimension k, denoted by
dim(P)=k, if the maximum number of affinely independent points in P is k+1. In this case a polyhedron (polytope) is said to be k-polyhedron (k-polytope). On the other hand, a polyhedron is of a full dimensional if dim (P) = d, [35, P.86].
Remark (1.1.1):
If the polyhedron P which is defined by, : bAXXP d ≤ℜ∈= is not full dimensional, then at least one of the inequalities ii bXa ≤ ,

i=1,2,…,k, is satisfied as equality by all points of P, where ia is the i-th row of the matrix A and ib are the values of the vector b, [35, p.86].
Proposition (1.1.1), [35, p.84]:
Let : bAXXP d ≤ℜ∈= then the following statements are equivalent:
(a) φ≠≤ℜ∈ : bAXX d .
(b) rank(A)=rank(A|b), where ,, mdm bA ℜ∈ℜ∈ × A|b is the augmented matrix of the system AX=b and rank(A|b) is the maximum number of linearly independent
rows ( columns ) of A|b.
Now, if P takes the form : bAXXP d ≤ℜ∈= , the pair A|b is said to be a half space representation or simply H-representation of P,
where ,, mdm bA ℜ∈ℜ∈ × [13].
Proposition (1.1.2), [35, p.87]: Let : bAXXP d ≤ℜ∈= be a polytope, then:
dim(P)+rank( ** bA )=d,
where ** bA denotes the corresponding rows of A|b, which represent the
equality sets of the representation A|b of P, that is, : ∗∗ =ℜ∈= bXAXP d , [35,p.86].
:Definition (1.1.4), [4]
Let : bAXXP d ≤ℜ∈= be a polyhedron. If the entries of A and b have integer values then this polyhedron is said to be rational
polyhedron.
Recall that for a given convex set S, a point SX ∈ is said to be vertex (or sometimes extreme point) if it does not lie on a line segment joining two other points of this set. In this case the line joining any two
vertices is said to be an edge [41, p.98].
It can be easily seen that any polyhedron is a convex set in dℜ .
Definition (1.1.5), [38]: A lattice polytope in dℜ (sometimes called integral polytope) is a polytope whose vertices are lattice points (integral points), that is,

points in dΖ . If the lattice polytope is of dimension d then this polytope is said to be a d-dimensional lattice polytope
Definition (1.1.6), [41, p.96 ]:
Given ∑=
=d
i
ii bxa1
, where ia and b are known real constants for
di ≤≤1 . The set of points d
iixX 1 == , which satisfies the above equation, is said to be a hyperplane.
Moreover, the set of points d
iixX 1 == is called a half- space if it
satisfies the inequality ∑=
≥d
iii bxa
1
, [36, p.413].
Definition (1.1.7), [10]:
Let P be a polyhedron in dℜ . For dc ℜ∈ and ℜ∈b , the
inequality ∑=
≤d
i
ii byc1
is called valid for P if it is satisfied by all points
in P, where d
iicc 1 == . The faces of P are the sets of the form
∑=
= ==d
i
ii
d
ii bycyYP1
1 :I for some valid inequality ∑=
≤d
i
ii byc1
.
Recall that a face F is said to be proper if PF ≠≠φ . On the
other hand the faces of dimension 0 and 1 are called vertices and edges respectively. However the faces of highest dimension are termed facets.
Definition (1.1.8), [12]:
A polytope in dℜ is said to be simple if there are exactly d edges through each vertex, and it is called simplicial if each facet contains
exactly d vertices.
It is known that a simplex in dℜ is a d-dimensional polyhedron, which has exactly d+1 vertices, [23, p.37].
Definition (1.1.9), [35, p.83 ]:
Given a non empty set dS ℜ⊆ , a point dX ℜ∈ is a convex combination of points of S if there exists a finite set of points t
iix 1 = in S
and t
+ℜ∈λ with ∑=
=t
i
i
1
1λ and ∑=
=t
i
ii xX1
λ .

It is known that the convex hull of S, denoted by conv(S) is the set of all points that are convex combinations of all points in S.
Now, if ,...,, 10 nvvvV = is a finite set of points in dℜ , the convex hull of V denoted by conv(V) is said to be convex polytope. In this case, V is called vertex representation or simply V-representation
of P, [13].
1.2 Some methods for the volume computation of a polytope
As mentioned before, computing the volume of a polytope is very important in many real life applications, so in this section we give some methods for finding it. There is a comparative study of various volume computation algorithms for polytopes in [13]. However there is no single algorithm that works well for many different types of them, [22].
For simple polytopes, triangulation-based algorithms are more
efficient and for simplicial polytopes sign-decomposition based algorithms are better, [13].
In this section, some methods for volume computation are given with different examples.
We start this section by the following remark. Remark (1.2.1):
All known algorithms for exact volume computation decompose a given polytope into simplices, and thus they all rely on the volume formula of a simplex which is given by the following proposition, [13]:
Proposition (1.2.1), [13]:
For a polytope represented by its vertices d
dvvv ℜ∈,...,, 10 , the
volume of it is given by
Vol( ),...,,( 10 dvvv∆ ) = ),...,det(!
1001 vvvv
d d −−
Where ),...,,( 10 dvvv∆ denotes the simplex in dℜ with vertices d
dvvv ℜ∈,...,, 10 and ),...,( 001 vvvv d −− is dd × matrix whose columns
are 001 ,..., vvvv d −− .
Next, there are two types of methods for exact volume
computation of the simple polytopes, which are discussed below:

I.Triangulation methods:
In these methods one has a simple polytope P in dℜ . P is
triangulated into simplices ),...,2,1( sii =∆ Us
iiP
1=
∆= . The volume of P
is simply the sum of the volumes of the simplices.
∑=
∆=s
i
iVolPVol1
)()( (1.1)
The following: boundary triangulation, Delaunay triangulation and Cohen & Hickey's combinatorial triangulation by dimensional recursion named, as triangulations method, [13].
An important difference between these methods is that the former two methods need only a V–representation while the last method requires both V- and H-representations, [13]. Before giving the signed decomposition methods, we need the following definition. Definition (1.2.1):
Let dℜ∈Ρ be a polytope, a signed union of P means, a
collection of polytopes d
k ℜ⊆ΡΡΡ ,...,, 21 such that Uk
ii
1=
Ρ=Ρ , and ji ΡΡ I
is a proper face of iΡ and jΡ , for ji ≠ .In this case we write U+
Ρ= iP ,
[30]. II. Signed decomposition methods:
Instead of triangulating a polytope P, one can decompose P into signed simplices whose signed union is exactly P. More specifically, P is represented as a signed union of simplices i∆ , i =1, 2, …, s. This
means,
Us
iii
1=
∆=Ρ σ (1.2)
Where iσ is either +1 or –1. The volume of P is, [13].

∑=
∆=s
i
iiVolPVol1
)()( σ
1.2.1 Triangulation methods
In this subsection we discuss briefly some of the known triangulation methods that compute the volume of the polytope.
(i) Boundary triangulation, [13]:
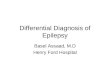
In boundary triangulation, one computes the convex hull of the perturbed points, interpreting the result in terms of the original vertices leads to a triangulation of the boundary, which by linking with a fixed interior point yields, a triangulation of P. For the convex hull computation the reverse search algorithm is chosen, [3], where only the V-representation of a polytope is required. To illustrate this method, consider the polytope which is represented by a set of vertices named a, b, c , d as given in figure (1). Using an interior point e where the boundary of a polytope is easily triangulated or already triangulated as in the case of simplicial polytopes. By linking a point e with the vertices a, b, c and d yields four triangles then, volumes of these triangles are found, summing all of these volumes the volume of this polytope is obtained.
(a) (b)
Figure (1): (a) represents a polytope P.
(b) represents a partition of the given polytope P by using the boundary triangulation method.
(ii) Delaunay triangulation, [13]:
Before we discuss this method, some basic definitions concerning the Delaunay triangulation are needed. Definition (1.2.2), [22]:

Given a set S of n distinct points in dℜ , Voronoi diagram is the partition of dℜ into n polyhedron regions (denoted by S∈ρρνο ),( ).
Each region )(ρνο is called Voronoi cell of ρ , which is defined as set
of points in dℜ that are closer to ρ than other points in S, or more
precisely ,)( ρρρνο −∈∀−≤−ℜ∈= •
• SqqXXX d .
Definition (1.2.3), [22]: Let S be a set of n points in dℜ . For each point dℜ∈ν , the nearest neighbor set denoted by )),(( νSnb of ν in S is the set of points
νρ −∈ S , which are closest to ν in Euclidean distance.
Definition (1.2.4), [22]:
Let S be a set of n points in dℜ . A point dℜ∈ν is said to be a Voronoi vertex of S if ),( νSnb is maximal over all nearest neighbor
sets. Definition (1.2.5), [22]: Let S be a set of n points in dℜ . The convex hull of the nearest neighbor set of Voronoi vertex ν denoted by )),(( νSnbconv is said to
be a Delaunay cell of ν .
The Delaunay triangulation of S is a partition of the convex hull conv(S) into the Delaunay cells of Voronoi vertices together with their faces, [22].
Now we discuss the method of Delaunay triangulation method
that requires only the V–representation of the polytope.
The geometric idea behind a Delaunay triangulation of a d–polytope is to ' lift ' it on a paraboloid in dimension d+1. The following construction is very important to compute the Voronoi diagram, [22].
Let S be a set of n points in dℜ . For each point dS ℜ⊆∈ρ ,
consider the hyperplane tangent to the paraboloid 22
11 ... dd xxx ++=+ in 1+ℜd at ρ :

This hyperplane is represented by h (ρ ) as:
02 1
11
2 =+− +==∑∑ d
d
j
jj
d
j
j xxρρ
where ),...,2,1( djj = ρ are the coordinates of ρ , for each point ρ ,
the equality in the above equation is replaced by the inequalities )(≥ ,
which yields a system of n inequalities that is denoted by 0≥− AXb .
The polyhedron P in 1+ℜd of all solutions X to the system of inequality is a lifting of the Voronoi diagram to one higher dimensional space. [13], shows that the underlying convex hull algorithm uses the ' beneath – beyond ' method. Example (1.2.1): Consider the set of vertices:
).4,4(),4,0(),0,4(),2,1(),1,2(),0,0( 654321 ======= ρρρρρρS
Here the volume of the polytope given by these vertices is to be determined. To do so, Delaunay triangulation is used to compute the volume of this polytope.
First, write down the system of linear inequalities in three variables as explained before. That is for each 6,...,2,1, =∈ jSjρ ,
apply the inequalities:
02 3
2
1
2
1
2 ≥+−∑∑==
xxj
jj
j
j ρρ
we get a system of six inequalities
03 ≥x
0245 321 ≥+−− xxx
0425 321 ≥+−− xxx
0816 31 ≥+− xx
0816 32 ≥+− xx
08832 321 ≥+−− xxx .

The set of solutions 3ℜ∈X of the above inequalities represents a polyhedron P. By applying the cdd+ program [22], the Delaunay cells,
),,( 531 ρρρ , ),,( 321 ρρρ , ),,( 421 ρρρ , ),,( 632 ρρρ , ),,( 642 ρρρ and ),,( 653 ρρρ a
re obtained. The cell ),,( 531 ρρρ means the triangle which is represented
by three vertices 31, ρρ and 5ρ , and similarly for the other cells.
Therefore six triangles are obtained, summing the volumes of these triangles yields the volume of the polyhedron P is equal to 16.
Figure (2): represents the polyhedron P with the set of vertices ,...,, 621 ρρρ and Delaunay cells.
(iii) Triangulation by Cohen & Hickey, [13]: This recursive scheme triangulates a d- polytope P by choosing any vertex Pv∈ as an apex and connecting it with the (d-1)–dimensional simplices resulting from a triangulation of all facets of P not containing v . To be precise, denote by kθ , dk ≤≤0 , the k- dimensional faces of P, and let η be a ' map ' which associates to each
face one of its vertices. Then the pyramids with apex )( dθη and bases
among the facets 1−dθ with 1)( −∉ dd θθη form a dissection of the
polytope.
Applying the scheme recursively to all 1−dθ results in a set of
decreasing chains of faces dd θθθθ ⊂⊂⊂⊂ −110 ... such that 1)( −∉ kk θθη for dk ≤≤1 . Then the set of corresponding simplices
))(),...,(),(( 10 dθηθηθη∆ is a triangulation of P.
To implement this recursive method, an extensive use of the
double description as V-representation and H-representation is made by representing all faces as sets of vertices.

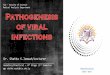
Note that in the case of Cohen & Hickey compared to a boundary triangulation all simplices in the facets containing the apex v are eliminated and therefore the number of simplices is usually reduced. Example (1.2.2):
Consider the polytope which is represented by set of vertices ,,,, 43210 ρρρρρ as illustrated in figure (3), let η be the 'map' which
assigns to each face of the polytope its vertex with the lowest number, so 0)( ρη =P , all facets which do not contain the vertex 0ρ are
examined, that is, II, III and IV. The scheme of the Cohen and Hickey is applied to facet II with 1)( ρη =II . II is intersected with all facets not
containing the vertex 1ρ , these are III, IV and V. The intersections with
IV and V are empty, so this recursion is unsuccessful. The intersection with III yields the vertex 2ρ , and the fixed vertices 10, ρρ , 2ρ forms a
first simplex. The other simplices obtained from III and IV is also marked in the figure (3). Therefore we have three triangles. Summing the volumes of these triangles yields the volume of the polytope.
Figure (3): represents the partition of the polytope by Cohen & Hickey's triangulation method.
1.2.2 Signed decomposition method In this subsection Lawrence's volume formula, which is one of the signed decomposition methods, is discussed. (i) Lawrence's volume formula, [13]: Assume the polytope P is simple and choose a vector dC ℜ∈ and
ℜ∈q such that the function ℜ→ℜdf : which is defined by
f(X)= qXCT + is not constant along any edge that connected the
vertices of the polytope P and TC is the transpose of C . Let V be the set

of vertices defining the polytope P. For each vertex Vv∈ , let vA be the
dd × – matrix composed by the rows of A which are binding at v. Then
by using [13], vA is invertible and [ ] CAT
v
v 1−=γ . The assumption
imposed on C assures that none of the entries of vγ is zero. It is shown
that
∑∏∈
=
+=Vv
d
i
v
iv
dT
Ad
qvCPVol
1
det!
)()(
γ
To illustrate this method, consider the following example.
Example (1.2.4) : Consider the polytope P which is described by the following
constraints 01 ≤− x
02 ≤− x
21 ≤x
22 ≤x
321 ≤+ xx
then
−−
=
11
10
01
10
01
A ,
=
2
1
x
xX and
=
3
2
2
0
0
b
It is easy to check that the polytope of this example is simple, therefore the Lawerence volume formula can be applied. Define a function f by 21)( xxXf −= where )1,1( −=TC and q = 0. Note that
f (X) is non – constant on each edge of the polytope in the figure (4), for example, on edge (1) which connect
21 and vv , 02 =x and 1x varies from
0 to 2. Therefore f (X) = 1
x which varies from 0 to 2 which means that
it is nonconstant on edge (1) and similarly on each edge of P. According to figure (4), it is seen that the set of vertices, which represents the polytope, is )2,0(),2,1(),1,2(),0,2(),0,0( 54321 ===== vvvvv .

Now, consider )0,0(1 =v , this vertex satisfies the first two constraints,
and this implies that
−−
=10
011v
A , hence 1det1
=vA and [ ]
= −
2
11
1
1
c
cAT
v
vγ
−=
−
−−
=1
1
1
1
10
011vγ
and for )0,2(2 =v , this vertex satisfies the second and third
constraints, that is,
−=
10
012vA , 1det
2=
vA And [ ]
=
−= −
1
1
1
11
2
2 T
v
v Aγ
And similarly for the other vertices we get
−=
1
23vγ ,
−=
1
24vγ And
−−
=1
15vγ
Then Lawrence's volume formula is applied to get the volume of
P.
∑∏∈
=
=Vv
i
v
iv
T
A
vCPVol 2
1
2
det !2
)()(
γ
( ) ( )
)1)(1)(1(!2
2
)1)(2)(1(!2
1
)1)(2)(1(!2
1
)1)(1)(1(!2
2
)1)(1)(1(!2
0 22222
−−−+
−−+
−++
−=
2
132414120 =+−+−++= )/()/( .

Figure (4): represents a polytope with the vertices
54321 ,,, vandvvvv
1.3 Methods for computing integral points The main objective of this section is to recall some methods for finding integral points of a polyhedron. In this work, we use the symbol
dP ΖI to denote the number of integral points in the polyhedron P,
where dΖ is the integer lattice and P is a rational polyhedron. These methods are: Method (1), [4]:
For d = 2, 2ℜ⊂P and P is an integral polyhedron. The famous formula, [42, p.240] states that
12
)(2
2 +Ζ∂
+=ΖI
IP
PareaP
That is, the number of integral points in an integral polyhedron is
equal to the area of the polyhedron plus half the number of integral points on the boundary of the polyhedron plus one. This formula is useful because it is much more efficient than the direct enumeration of integral points in a polyhedron. The area of P is computed by triangulating the polyhedron. Furthermore, the boundary ∂P is a union of finitely many straight-line intervals, and counting integral points in intervals is easy. Method (2), [4]:
Let dP ℜ⊂ be a polytope, then one can write the number of integral points in P as

dP ΖI ∑Ζ∈
=dX
PX ),(δ
where
∉∈
=PXif
PXifPX
0
1),(δ
Before we give the next method, we need the following definition.
Definition (1.3.1), [2, p.61]: The Dedekind sum of two relatively prime positive integers a and
b denoted by ),( baS can be defined as follows,
∑=
=b
i b
ai
b
ibaS
1
),(
where
Ζ∈
Ζ∉−−=xif
xifxxx0
2
1))((
and x is the greatest integer x≤ .
Remarks (1.3.1):
Dedekind sums appear in various branches of mathematics: the number theory, algebraic geometry and topology. These include the quadratic reciprocity law, random number generators [32], and lattice point problems [19]. More details about Dedekind sums are given in chapter two
Now, we are in a position that we can explain the following
method.
Method (3), [4]: Let 3ℜ⊂∆ be the tetrahedron with vertices (0, 0, 0), (a, 0, 0),
(0, b, 0), (0, 0, c) where a, b and c are pairwise coprime positive integers, then the number of integral points in ∆ can be expressed as:
),(),(
),()1
(12
1
463
cabSbacS
abcSabcc
ab
a
bc
b
accbabcacababcP
−
−−++++++++++=ΖI

This formula is useful because it reduces counting the number of integral points to a computation of Dedekind sums, which can be done efficiently. Method (4), [4]:
Let dP ℜ⊂ be an integral polytope, for positive integer t, let
tP=tX : X∈P denote the dilated polytope P. By [42, p.238] there is a polynomial p(t) called the Ehrhart polynomial of P )(tptP d =ΖI
where p(t) = 0
1
1 ... atata d
d
d
d +++ −−
furthermore, 10 =a and da is the volume of the polytope P.
To illustrate these methods, consider the following examples. Example (1.3.1):
Let us consider three points in two dimensions such that )0,0()0,1(),1,0( 321 === vandvv . Then the convex hull of 321, vandvv
is a triangle in two dimensions.
We compute the number of integral points by these methods. From method (1), one can have
12
)(2
2 +Ζ∂
+=ΖI
IP
PareaP
the area of triangle, is area(P)=0.5(1)(1)=0.5 and 32 =Ζ∂ IP which
represents the number of integral points on the boundary of the triangle. Then the number of integral points of the triangle is .31)3(5.05.02 =++=ΖIP
In method (2), we have 2ΖIP ∑
Ζ∈
=2
),(X
PXδ
1),()1,0( 11 =∈= PvthenPv δ

1),()0,1( 22 =∈= PvthenPv δ
1),()0,0( 33 =∈= PvthenPv δ
therefore 31112 =++=ΖIP , which is the number of integral points
for the triangle. Form method (4), one can have =Ζ2
IP 112 ++ aa
where 2a is the volume of the polytope and 1a is the half number of
integral points on the boundary of the polytope. In this case,
2a = 0.5(1)(1)=0.5
and 2a = 3/2
therefore 315.15.02 =++=ΖIP .
Example (1.3.1):
Let us consider the tetrahedron 3ℜ⊂∆ with vertices (0,0,0), (3,0,0), (0,5,0), (0,0,7).
Form method (3), the number of integral points in ∆ can be
expressed as,
),(),(),(
)1
(12
1
463
cabSbacSabcSabcc
ab
a
bc
b
accbabcacababcP
−−−
++++++++++=ΖI
here a=3, b=5 and c=7. Therefore
)7,15()5,21(
)3,35()105
1
7
15
3
35
5
21(
12
1
4
753352115
6
1053
SS
SP
−−
−++++++++++=ΖI
After simple computation one can get, S(35,3)=-0.05555, S(21,5)=0.2, S(15,7)= 0.35714, Thus .4035714.02.005555.0501877.15.215.173 =−−+++=ΖIP

ا
ل ا طو ب د ح ب د اھ nRا#!"! ا %&' ت ا") .(ع . -ا +وع ا+*
21"3 ح21"0ن د ا -* 2 إ ء 5و04 اV "&"1 -و2H 3"1-وھ
.ود ا ط ا#!"! ، ط+ق '&% ! ب د ا!ود
ى ھه ا+ق طرت ا . ت > <'ام >; ا+ق2 ب د ود ا*+ھ ر B+ھ"5 ! ب 0ت دة ا!ود ا*+ھ رت .وا<
C& "< ت ا!"& طرت ط+* ! ب د ا ط ا#!"! و2 أ-+اء ا
1"3 د ا .ودرا< EF2"+ھ &C د ھه ا ط ح#% ا "G ا+ق ا- %&' &1F< H!)و H'>ا.


Acknowledgements
My deepest thanks for Allah, for his generous by providing me
the strength to accomplish this work.
I would like to express my deep appreciation and gratitude to
my supervisors Dr. Adil G. Naoum and Dr. Ahlam J. Kaleel for their
help and advice during the preparation of this thesis.
Also, I would like to express my thanks to all members and
friends in the Department of Mathematics and Computer
Applications.
And all members in the central library of the University of
Technology especially Thawara and Hatham.
Shatha Assaad Al-Najjar
2005


Appendix
Before we give the proof of the relationship between the Dedekind sum and the Dedekind cotangent sum, we need the following definitions and lemma.
Definition 1 By means of the discrete Fourier series of Saw tooth function (saw
tooth function ((x)) is the first Bernoulli function ( ) ( ) ZxxBxB ∈= if 0, 11 ), and
Ρπ−Ρ
=∑
Ρπ
Ρ=
Ρikn
k
ekin 21
1
cot2
Definition 2 For a,b,c,m,n ∈N
( )
= ∑a
kcB
a
kbBcbaS n
bkmnm
mod, ,, is called Dedekind Bernoulli sum.
Definition 3 Let Naaa d ∈,,, 21 K be relatively prime to Na ∈0 define the
higher-dimensional Dedekind sum as
( ) ( )
π
π
π−= ∑−
= 00
21
1 0
1
0
10 cotcotcot1
,...,,02
a
ka
a
ka
a
ka
aaaaS d
a
kd
d
L .
Note that this sum is zero if d is odd, since the cotangent is an odd function. Lemma For m≥2
( )( ) Ρ
πΡ
=
−∑
Ρπ
Ρ+
Ρ−=
Ρkni
k
m
m
mm
m eki
mBn
B2
1
1cot2
These discrete Fourier expansions can be used to rewrite the Dedekind Bernoulli sums in terms of the Dedekind cotangent sums. Corollary If a, b, c ∈N are pairwise relatively rime and m, n ≥2 are integers with the same parity then
( )
( )( )( ) ( )
a
BBcotcot
2
1-mn
,,
1-nm
nm1-n1-a
1k
1-m
1
2
mod,
+=
−++
−
+
π
π=
=
∑
∑
a
kb
a
kc
a
a
kcB
a
kbBcbaS
nmnm
nm
nak
m
def
nm

We note that the parity assumption on m and n is no restriction; since the sums vanish if m+n is odd it is worth mentioning that a close relative of these sums namely
( )( )( )
π
π=
∑∑
=+
−−
= a
kb
a
k
aa
kbB
a
kB
mm
nma
knm
1-m1-a
1k1
21
1
cotcot2
1-m
Proof By lemma we get
( )
( )( )
( )( )
( ) ( )( )
( )( )
( )( ) ( ) ( )
π
=
π
=
+
π
=
π
=
π
=+
π
=
π
=
∑∑∑
∑ ∑∑
∑∑ ∑
∑
π
π
+
π
+
π
+
π
+=
π
+
π
+=
=
a
kcl21-a
1l
1-na
kbj21-a
1j
1-ma
kb21-a
1l
1-mn
mod
a
kcl21-a
1l
1-nma
kcl21-a
1l
1-nmnm
a
kll21-a
1
1-nn
mod
a
kbj21-a
1j
1-mm
mod,
ecotecot2a
iecot
2a
i
a-
mB
ecot2a
i
a-
nBecot
2a
i
a-
nB
a-
BB
ecot2a
in
a-
Becot
2a
im
a-
B
,,
a
l
a
jmn
a
j
a
l
a
l
a
l
a
j
a
kcB
a
kbBcbaS
nmj
m
n
ak
n
m
n
mnm
l
n
nak
m
m
nak
m
def
nm
( ) ( ) ( )lcjb21-a
1l
1-n1-a
1lj,
1-m
mod
ecotcot2a
i
+π
==
+
∑∑∑
π
π
= a
ki
ak
nm
a
l
a
jmn
( ) ( )( )
( ) ( )
( )∑
∑ ∑∑ ∑
+
π
=
π
=
−
+
π−
+
π
=
aknm
nm
iakcl
akm
m
nia
kbj
ak
m
a
BB
ea
l
a
Be
a
j
mod
2
mod
1-a
1l
1-n2
mod
1-a
1lj,
1-m
cot2a
in cot
2a
im
We use the fact that m+n=even. Note: a,b,c are relatively prime
( )
=∑π
else 0n
a if a
mod
2
ak
aink
e
if a|(jb+lc) then ajbcl mod1−= therefore
( ) ( )( )
( )( ) ( ) ( )( )
( )( )
( )( ) ( )
( ) 1
11-n
1-a
1j
1-m2
11-n
1-a
1j
1-m2
,
cotcot2
1
cotcot2
1,,
−+
−
=+
+
+
−
=+
+
−+
π−
π−=
−−+
π−
π−=
∑
∑
nmnm
nm
nm
nmnm
nm
nm
nm
a
BB
a
jbc
a
j
amn
a
BBa
a
jbc
a
j
amncbaS

Committee Certification We, the examining committee, certify that we read this thesis and have examined the student Shatha Assaad Al-Najjar in its contents and that, in our opinion it is adequate as a thesis for the degree of Ph-D of Science in Mathematics. Chairman Member Signature: Signature: Name: Dr. Nadar J. Mansour Name: Dr. Mohamad S. Kerdar Professor Professor Date: / 10 / 2005 Date: / 10 / 2005 Member Member Signature: Signature: Name: Dr. Akram M. Al-bood Name:Dr. Norii F. Athab Assist professor Assist professor Date: / 10 / 2005 Date: / 10 / 2005
Member (supervisor) Member Member(supervisor)
Signature: Signature: Signature: Name: Dr. Adil G. Naoum Name: Dr. Sahab K. Al-Saadi Name: Dr. Ahlam J. Kaleel
Professor Assist professor Assist professor Date: / 10 / 2005 Date: / 10 / 2005 Date: / 10 / 2005
I hear be certify upon the decision of the examining committee. Signature:

Name: Dr. LAITH-ABDUL AZIZ AL-ANI Dean of the College
Date: /10 /2005
Supervisors Certification
We certify that this thesis was prepared under our supervision at the University of Al-Nahrian, Colloge of Science as a partial fulfillment of the Requirements of Doctor of Philosophy of Science in Mathematics. Signature: Signature: Name: Dr. Adil G. Naoum Name: Dr. Ahlam J. Kaleel Professor Assist professor Date: / / 2005 Date: / / 2005 In view of the available recommendations, I forward this thesis for debate by examining committee. Signature: Name: Dr. Akram M. Al-Abood Assist professor

Date: / /2005

Contents Abstract List of symbols Introduction Chapter One Preliminaries.
1. Representation of polyhedron. 2 2. Some methods for volume computation of a polytope. 5
1.2.1 Triangulation methods 6 1.2.2 Signed decomposition method 11
3. Methods for computing integral points. 13
Chapter Two Computing the Volume and Integral Points of V-representation of a Polytope Using
Ehrhart Polynomials. 1. Basic concepts about Ehrhart polynomials. 18 2. Counting integral points using Dedekind sums. 20 3. Counting integral points using residue theorem. 25 4. The Ehrhart coefficients. 29 5. Computing 3−dc and 4−dc in the Ehrtart polynomial. 37 6. General formula for the differentiation of h and J,...,J,J,I d21 . 52
Chapter Three The Ehrhart Polynomial of H-representation of a Polytope.
1. Computing the volume of a convex polytope using Laplace 59 transform. 3.1.1 The direct method. 61
3.1.2 The indirect method. 65 2. Some basic concepts about Birkhoff polytope. 68 3. The Ehrhart polynomial of a Birkhoff polytope. 70 4. The effect of matrix operations on the number of integral points. 77
References 92

List of symbols
ℜ the set of all real numbers. Ζ the set of all integers. dℜ the vector space of d-vectors. dm×ℜ an dm × real matrix. dΖ the standard integer lattice. d
+ℜ d-space of vectors with positive components. Vol(P) volume of P. ext(P) extreme points of P. x greatest integer ≤x.
x least integer ≥ x.
νo(P) Voronoi cell of p. nb(S,v) nearest neighbor set of v in S. conv(nb(S,v)) Delaunay cell of v. dP ΖI number of integral points of a polyhedron.
2Ζ∂ IP number of integral points on the boundary of the
polyhedron. ),( pxδ delta function of x and p.
x the Euclidean norm of a vector x.
rank(A) rank of the matrix A. dim(P) dimension of the polytope P.
),...,,( 10 dvvv∆ simplex in dℜ with vertices d
dvvv ℜ∈,...,, 10 .
),...,det( 001 vvvv d −− determinant of dd × matrix whose columns are 001 ,..., vvvv d −− .
ipP U+
= signed union of ip .
∏=
n
i
ix1
multiplication symbol of n
xxx ,...,,21
.
L(P,t) the Ehrhart polynomial of a polytope P. S(a,b) the Dedekind sum of a and b. Res(f(z), z=a) residue of f(z) about z = a. ),(1 nmS Stirling number of the first kind. ),(2 nmS Stirling number of the second kind.
Ζ∈
Ζ∉−−=xif
xifxxx0
2
1))((

oP interior of a polytope P.
nB Birkhoff polytope. ( )tH n Ehrhart polynomial of the Birkhoff polytope.
int |Z| = r interior of the circle |Z| = r.

Dedication
To those they covered me with their love and kindness
My mother & My father
My brothers, sisters and My aunt
To my Dear husband Mahmood who supported me by all
means
To my children’s Rukia, Nayarh and Ali
With love.


Introduction A wide variety of pure and applied mathematics involve the problem of counting the number of integral points inside a region in space. Applications range from the very pure: number theory, toric Hilbert functions, Kostant's partition function in representation theory, Ehrhart polynomial in combinatorics to the very applied: cryptography, integer programming, statistical contingency, mass spectroscope analysis. Perhaps the most basic case is when the region is a convex bounded polyhedron. Convex polyhedra, i.e., the intersections of a finite number of half spaces of the space dℜ , are important objects in various areas of mathematics and other disciplines as seen before. In particular, the compact ones among them (polytopes), which, can equivalently be defined as the convex hulls of finitely many points in dℜ , have been studied since ancient times, for example, platonic solids, diamonds, the great pyramids in Egypt etc., [27]. polytopes appear as building blocks of more complicated structures, e.g. in combinatorial, topology, numerical mathematics and computed aided designs. Even in physics polytopes are relevant e.g., in crystallography or string theory, [31]. Probably the most important reason of the tremendous growth of interest in the theory of convex polyhedra in the second half of 20'th century was the fact that linear programming i.e., optimizing a linear function over the solutions of a system of linear inequalities became a wide spread tool to solve practical problems in industry and military. Dantzig's simplex algorithm, developed in the 40's of the last century, showed that geometric and combinatorial knowledge of polyhedra (as the domains of linear programming problems), is quite helpful for finding and analyzing solution procedures for linear programming problems, [31]. Since the interest in the theory of convex polyhedra to a large extent comes from algorithmic problems, it is not surprising that many algorithmic questions on polyhedra rose in the past, but also inherently, convex polyhedra (in particular: polytopes) give rise to algorithmic questions, because they can be treated as finite objects by definition; this makes it possible to investigate the smaller ones among them by computer programs like the polymake - system written by Gawilow and Jowing, [24].
Once chosen to exploit this possibility one immediately finds oneself confronted with many algorithmic challenges.

Also, the notion of the volume of a polytope is basic and intuitive; its computation has raised a lot of problems. In this thesis we attempt to answer some fundamental and practical question on volume computation of higher dimensional convex polytopes given by their vertices and / or facets. In particular, we study through extensive computational experiment typical behavior of the exact methods, including Delaunay and boundary triangulation, the triangulation scheme described by Cohen and Hickey and the methods presented by Lawrence, [13].
This thesis consists of three chapters. In chapter one we try to give a short introduction, provide a sketch of
what bounded polyhedron looks like and how they behave with many examples. Also we recall some methods for finding the number of integral points inside a convex polytope, [13], [25] and [4].
In chapter two we present some methods for computing the
coefficients of Ehrhart polynomial that depend on the concepts of Dedekind sum and residue theorem in complex analysis. Also, a method for counting these coefficients is introduced. The polytope that we take are with V-representations, [5] and [60]. We give a method for computing the coefficients of the Ehrhart polynomial, 3−dc , 4−dc until 9−dc also we give a formula for the differentiation of the given method.
In chapter three, a method for finding the volume of H-representation
of a polytope using Laрlace transform is presented and some basic concepts and remarks about the Birkhoff polytope and their volumes are discussed with their Ehrhart polynomials, [33], [11], [7], [8] and [9]. We make a change on the matrix, which represents the polytopes and finds a general formula for the number of integral points; also we make a change of matrix operation and study the effect of this change on the number of integral points of the polytopes. To the best of our knowledge, this result seems to be new.

٩٢
References
[1] J. Abate, G. L. Choudhury and W. Whitt, Numerical inversion of multidimensional Laplace transforms by the Laguerre method, http://citeseer.ist.psu.edu/abate96numerical.html,(1996), 1-24.
[2] T. M. Apostol, Modular functions and Dirichlet series in number
theory, Springer–Verlag Inc. 1976. [3] D. Avis and D. Bremner, How good are convex hull algorithms,
http://citeseer.ist.psu.edu/avis95how.html , (1995), 1-24. [4] A. Barvinok and J. E. Pommersheim, An algorithmic theory of lattice
points in polyhedra, new perspectives in geometric combinatorics, MSRI publications, 38, (1999), 91-147.
[5] M. Beck, The Reciprocity law for Dedekind sums via the constant
Ehrhart coefficient, AMM, 106, (5), (1999), 459-462. [6] M. Beck, Counting lattice points by means of the residue theorem,
RamanuJan J. 4, (3), (2000), 299-310. [7] M. Beck and D. Pixton, The Ehrhart polynomial of the Birkhoff
polytope,www.math.binghamton.edu/dennis/papers/birkhoff.html- 3k,(2002),1-14
[8] M. Beck, J. A. DE. Loera, M. Develin, J. Peifle and R. P. Stanley,
Coefficients and roots of Ehrhart polynomials, conference on integer points in polyhedra (13-17) July in Snowbird, (2003), 1-24.
[9] M. Beck and D. Pixton, The Volume of the 10th Birkhoff polytope,
www.math.binghamton.edu/dennis/papers/birkhoff.html-3k,(2003) [10] A. Bemporad, K. Fukuda and F. D. Torrisi, Convexity recognition of
the union of polyhedra, http://citeseer.ist.psu.edu/300246.html,(2000),1-16. [11] I. Bengtesson, A. Ericsson, M.Kuś, W. Tadej and K. Życzkowski,
Birkhoff `s polytope and unistochastic matrices N=3 and N=4, arXiv: math.CO/0402325 v2 24 Feb 2004, (2004), 1-30.

٩٣
[12] M. Brion and M. Vergne, Lattice points in simple polytopes, J. Amer. Math. Soc., 10, (2), (1997), 371-392.
[13] B. Büeler and A. Enge and K. Fukuda, Exact volume computation
for polytopes: A practical study, http://citeseer.ist.psu.edu/article/bueler98exact.html, (1998), 1-17. [14] C. S. Chan, D. P. Robbins and D. S. Yuen, on the volume of
a certain polytope, experiment Math.9, (1), (2000), 91-99. [15] C. S. Chan and D. P. Robbins, on the volume of the polytope of
doubly stochastic matrices, arXiv:math.CO/9806076 v1, 13 Jun 1998, (2002), 1-17.
[16] J. A. De Loera, R. Hemmecke, J. Tauzer and R.Yoshida, effective
lattice points counting in rational convex polytopes, J. Symbolic computation, (2003), 1-33.
[17] J. A. De Loera, D. Haws, R. Hemmecke, A user´s Guide for LattE
v1.1,http://www.math.ucdavis.edu/~Latte/manual/v1.1/pdf.,(2003), 1-22.
[18] R. Diaz and S. Robins, The Ehrhart polynomial of a lattice n-
simplex, Electronic research announcements of AMS. 2, (1), (1996), 1-6.
[19] R. Diaz, S. Robins, The Ehrhart polynomial of a lattice polytope,
Annals of Math. 145, (1997), 503-518. [20] P. Franklin, Functions of complex variables, Prentice – Hall, INC.
Englewood Cliffs, N. J., 1958. [21] B. A. Fuchs and B. V. Shabat, Functions of a complex variable and
some of their applications, Pergamon press LTD, 1964. [22] K. Fukuda, frequently asked questions in polyhedral computation,
http://www.ifor.math.ethz.ch/staff/fukuda/polyfaq/polfaq.html,(2004), 1-30.
[23] S. I. Gass, Linear programming, McGraw-Hill, Inc., 1985.

٩٤
[24] E. Gawrilow and M. Joswig, polymake: a Freme work for analyzing convex polytopes,
http://citeseer.ist.psu.edu/gawrilow99polymake.html, (1999), 1-31. [25] H. Greenberg, Polyhedral computation,
http://gcrg.ucsd.edu/classes/polyhcomp.pdf,(2003), 1-28 [26] P. Gritzmann and V. Klee, on the complexity of some basic
problems computational convexity, cmath. phys. sci-440, kluwer Acad. publ. Dordrecht, (1994), 373-466.
[27] J. Gubeladze, Course in information, Math 890 Discrete Geometry
Fall(2003),math.sfsu.edu/gubeladze/fall2003/discrete.pdf-63k., (2003).
[28] B. Grünbaum and G.C. Shephard, Pick´s theorem, the Amer. Math.
Monthly, 100, (2), (1993), 150-161. [29] R. Hans, Topics in analytic number theory, Springer - Verlag Berlin
Heidelberg New York, 1973. [30] M. Henk, J. R. Gebert and G.M. Ziegler, basic properties of convex
polytopes, http://citeseer.ist.psu.edu/henk97basic.html,(2004), 1-28. [31] V. Kaibel and M.E. Pfetsch, some algorithmic problems in polytope
theory, www.zib.de/pfetsch/publications/polycomplex.pdf, (2002), 1-25.
[32] D. Knuth, The art of computer programming, Vol. 2. Addison –
Wesley, Reading, Mass., 1981. [33] J. B. Lasserre and E. S. Zeron, A Laplace transform algorithm for the
volume of a convex polytope, arXiv: math.NA/0106168 v1 Jun 2001, (2001), 1-13.
[34] P. Mcmullen and G. C. Shephard, Convex polytopes and upper
bound conjecture, Cambridge University Press, 1971. [35] G. L. Nemhauser and L. A. Wolsey, Integer and combinatorial
optimization, John Wiley & Sons, Inc., 1988. [36] R.G. Parker and R. L. Radin, discrete optimization, Academic press,
Inc. 1988.

٩٥
[37] I. Pak, four questions on Birkhoff polytope, Annals of
combinatorics, 4, (2000), 83-90. [38] O. Pikhurko, lattice points in lattice polytopes,
http://citeseer.ist.psu.edu/oleg2000lattice.html,2, (2000), 1-14. [39] J. Pommersheim, Toric varieties, lattice points, and Dedekind sums,
Math. Ann. 295, (1993), 1-24. [40] G. Polya and R. E. Tarjan and D.R. Woods, Notes on introductory
combinatorics, Birkhaüser Bostan, Inc., 1983. [41] S. S. Rao, Optimization theory and applications, John Wiley & Sons,
1984. [42] R. P. Stanley, Enumerative combinatorics , Wadsworth & Brooks /
Cole Advanced Books & software, California, 1986. [43] R. P. Stanley, linear homogeneous Diophantine equations and magic
labeling of graphs, Duke Math. J.40, (1973), 607-632.

Chapter One Preliminaries
Introduction
Convex bounded polyhedrons are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their importance for many other mathematical subjects, ranging from the integration theory, algebraic topology, and algebraic geometry (toric varieties) to the linear and combinatorial optimization. In this chapter we try to give a short introduction and provide a sketch of what bounded polyhedron looks like and how they behave with many examples. A convex polyhedron is an intersection of a finite number of half spaces of the space dℜ , and a convex polytope is a bounded convex polyhedron. Every convex polyhedron has two natural representations, a half space representation (H-representation) and a vertex representation (V-representation). In recent years various techniques of geometric computations associated with convex polyhedron have been discovered, see [13], [31], [16] and [17]. Also, we recall some methods for finding the volume of a convex polytope and other methods for finding the number of integral points inside a convex polytope. This chapter consists of three sections:
In section one, some basic definitions with some useful remarks about representation of the polyhedron are presented.
In section two, some methods for computing the volume of convex polytopes are given with some illustrative examples. These are classified into two groups: triangulation methods and signed decomposition methods.
The triangulation methods include boundary triangulation, Delaunay triangulation and Cohen & Hickey's triangulation, [13]. The signed decomposition methods include Lawerence's method, [25].

Chapter One Preliminaries
٢
In section three, some methods for finding the number of integral points of a convex polytope are discussed; these methods are demonstrated with some examples. 1.1 Representation of a polyhedron
The volume of a convex bounded polyhedron is not easy to compute and the basic methods for exact computation of this volume can be classified according to whether a half space representation or a vertex representation of it, [33]. Therefore, in this section some basic definitions on a convex bounded polyhedron and its representations are given.
We start this section by the following definitions:
Definition (1.1.1), [35, p.85]:
Let bAX ≤ where dmA ×ℜ∈ is a given real matrix, and mb ℜ∈ is a known real vector. A set : bAXXP d ≤ℜ∈= is said to be a polyhedron.
A polyhedron P is bounded if there exists 1
+ℜ∈ω such that
ω≤X for every PX ∈ , [35, p.86].
Definition (1.1.2), [35, p.85]:
Every bounded polyhedron is said to be a polytope. Definition (1.1.3), [35, p.84]:
Let ,...,, 21 kxxxS = where d
ix ℜ∈ , ki ≤≤1 , then S is said to be
affinely independent if the unique solution of 01
=∑=
i
k
i
i xa and
01
=∑=
k
i
ia is 0=ia , for i = 1, …, k.
Recall that a polyhedron P is of dimension k, denoted by dim(P)=k,
if the maximum number of affinely independent points in P is k+1. In this case a polyhedron (polytope) is said to be k-polyhedron (k-polytope). On the other hand, a polyhedron is of a full dimensional if dim (P) = d, [35, P.86]. Remark (1.1.1): If the polyhedron P which is defined by, : bAXXP d ≤ℜ∈= is not full dimensional, then at least one of the inequalities ii bXa ≤ ,

Chapter One Preliminaries
٣
i=1,2,…,k, is satisfied as equality by all points of P, where ia is the i-th row of the matrix A and ib are the values of the vector b, [35, p.86].
Proposition (1.1.1), [35, p.84]:
Let : bAXXP d ≤ℜ∈= then the following statements are equivalent: (a) φ≠≤ℜ∈ : bAXX d .
(b) rank(A)=rank(A|b), where ,, mdm bA ℜ∈ℜ∈ × A|b is the augmented matrix of the system AX=b and rank(A|b) is the maximum number of linearly independent rows ( columns ) of A|b.
Now, if P takes the form : bAXXP d ≤ℜ∈= , the pair A|b is said to be a half space representation or simply H-representation of P, where ,, mdm bA ℜ∈ℜ∈ × [13]. Proposition (1.1.2), [35, p.87]:
Let : bAXXP d ≤ℜ∈= be a polytope, then:
dim(P)+rank( ** bA )=d,
where ** bA denotes the corresponding rows of A|b, which represent the
equality sets of the representation A|b of P, that is, : ∗∗ =ℜ∈= bXAXP d , [35,p.86].
Definition (1.1.4), [4]: Let : bAXXP d ≤ℜ∈= be a polyhedron. If the entries of A and b have integer values then this polyhedron is said to be rational polyhedron.
Recall that for a given convex set S, a point SX ∈ is said to be vertex (or sometimes extreme point) if it does not lie on a line segment joining two other points of this set. In this case the line joining any two vertices is said to be an edge [41, p.98].
It can be easily seen that any polyhedron is a convex set in dℜ .
Definition (1.1.5), [38]:
A lattice polytope in dℜ (sometimes called integral polytope) is a polytope whose vertices are lattice points (integral points), that is, points

Chapter One Preliminaries
٤
in dΖ . If the lattice polytope is of dimension d then this polytope is said to be a d-dimensional lattice polytope
Definition (1.1.6), [41, p.96 ]:
Given ∑=
=d
i
ii bxa1
, where ia and b are known real constants for
di ≤≤1 . The set of points d
iixX 1 == , which satisfies the above equation, is said to be a hyperplane.
Moreover, the set of points d
iixX 1 == is called a half- space if it
satisfies the inequality ∑=
≥d
iii bxa
1
, [36, p.413].
Definition (1.1.7), [10]: Let P be a polyhedron in dℜ . For dc ℜ∈ and ℜ∈b , the inequality
∑=
≤d
i
ii byc1
is called valid for P if it is satisfied by all points in P, where
d
iicc 1 == . The faces of P are the sets of the form
∑=
= ==d
i
ii
d
ii bycyYP1
1 :I for some valid inequality ∑=
≤d
i
ii byc1
.
Recall that a face F is said to be proper if PF ≠≠φ . On the other hand the faces of dimension 0 and 1 are called vertices and edges respectively. However the faces of highest dimension are termed facets. Definition (1.1.8), [12]: A polytope in dℜ is said to be simple if there are exactly d edges through each vertex, and it is called simplicial if each facet contains exactly d vertices.
It is known that a simplex in dℜ is a d-dimensional polyhedron, which has exactly d+1 vertices, [23, p.37]. Definition (1.1.9), [35, p.83 ]: Given a non empty set dS ℜ⊆ , a point dX ℜ∈ is a convex combination of points of S if there exists a finite set of points t
iix 1 = in S
and t
+ℜ∈λ with ∑=
=t
i
i
1
1λ and ∑=
=t
i
ii xX1
λ .

Chapter One Preliminaries
٥
It is known that the convex hull of S, denoted by conv(S) is the set of all points that are convex combinations of all points in S.
Now, if ,...,, 10 nvvvV = is a finite set of points in dℜ , the convex hull of V denoted by conv(V) is said to be convex polytope. In this case, V is called vertex representation or simply V-representation of P, [13].
1.2 Some methods for the volume computation of a polytope
As mentioned before, computing the volume of a polytope is very important in many real life applications, so in this section we give some methods for finding it. There is a comparative study of various volume computation algorithms for polytopes in [13]. However there is no single algorithm that works well for many different types of them, [22].
For simple polytopes, triangulation-based algorithms are more
efficient and for simplicial polytopes sign-decomposition based algorithms are better, [13].
In this section, some methods for volume computation are given with different examples.
We start this section by the following remark. Remark (1.2.1):
All known algorithms for exact volume computation decompose a given polytope into simplices, and thus they all rely on the volume formula of a simplex which is given by the following proposition, [13]:
Proposition (1.2.1), [13]:
For a polytope represented by its vertices d
dvvv ℜ∈,...,, 10 , the volume of it is given by
Vol( ),...,,( 10 dvvv∆ ) = ),...,det(!
1001 vvvv
d d −−
Where ),...,,( 10 dvvv∆ denotes the simplex in dℜ with vertices d
dvvv ℜ∈,...,, 10 and ),...,( 001 vvvv d −− is dd × matrix whose columns are 001 ,..., vvvv d −− .
Next, there are two types of methods for exact volume computation of the simple polytopes, which are discussed below:

Chapter One Preliminaries
٦
I.Triangulation methods: In these methods one has a simple polytope P in dℜ . P is
triangulated into simplices ),...,2,1( sii =∆ Us
iiP
1=
∆= . The volume of P is
simply the sum of the volumes of the simplices.
∑=
∆=s
i
iVolPVol1
)()( (1.1)
The following: boundary triangulation, Delaunay triangulation and Cohen & Hickey's combinatorial triangulation by dimensional recursion named, as triangulations method, [13].
An important difference between these methods is that the former two methods need only a V–representation while the last method requires both V- and H-representations, [13]. Before giving the signed decomposition methods, we need the following definition. Definition (1.2.1):
Let dℜ∈Ρ be a polytope, a signed union of P means, a collection
of polytopes d
k ℜ⊆ΡΡΡ ,...,, 21 such that Uk
ii
1=
Ρ=Ρ , and ji ΡΡ I is a proper
face of iΡ and jΡ , for ji ≠ .In this case we write U+
Ρ= iP , [30].
II. Signed decomposition methods:
Instead of triangulating a polytope P, one can decompose P into signed simplices whose signed union is exactly P. More specifically, P is represented as a signed union of simplices i∆ , i =1, 2, …, s. This means,
Us
iii
1=
∆=Ρ σ (1.2)
Where iσ is either +1 or –1. The volume of P is, [13].
∑=
∆=s
i
iiVolPVol1
)()( σ
1.2.1 Triangulation methods
In this subsection we discuss briefly some of the known triangulation methods that compute the volume of the polytope.

Chapter One Preliminaries
٧
(i) Boundary triangulation, [13]: In boundary triangulation, one computes the convex hull of the
perturbed points, interpreting the result in terms of the original vertices leads to a triangulation of the boundary, which by linking with a fixed interior point yields, a triangulation of P. For the convex hull computation the reverse search algorithm is chosen, [3], where only the V-representation of a polytope is required. To illustrate this method, consider the polytope which is represented by a set of vertices named a, b, c , d as given in figure (1). Using an interior point e where the boundary of a polytope is easily triangulated or already triangulated as in the case of simplicial polytopes. By linking a point e with the vertices a, b, c and d yields four triangles then, volumes of these triangles are found, summing all of these volumes the volume of this polytope is obtained.
(a) (b)
Figure (1): (a) represents a polytope P.
(b) represents a partition of the given polytope P by using the boundary triangulation method.
(ii) Delaunay triangulation, [13]:
Before we discuss this method, some basic definitions concerning the Delaunay triangulation are needed. Definition (1.2.2), [22]:
Given a set S of n distinct points in dℜ , Voronoi diagram is the partition of dℜ into n polyhedron regions (denoted by S∈ρρνο ),( ). Each region )(ρνο is called Voronoi cell of ρ , which is defined as set of
points in dℜ that are closer to ρ than other points in S, or more precisely
,)( ρρρνο −∈∀−≤−ℜ∈= •• SqqXXX d .

Chapter One Preliminaries
٨
Definition (1.2.3), [22]: Let S be a set of n points in dℜ . For each point dℜ∈ν , the nearest neighbor set denoted by )),(( νSnb of ν in S is the set of points
νρ −∈ S , which are closest to ν in Euclidean distance. Definition (1.2.4), [22]:
Let S be a set of n points in dℜ . A point dℜ∈ν is said to be a Voronoi vertex of S if ),( νSnb is maximal over all nearest neighbor sets. Definition (1.2.5), [22]: Let S be a set of n points in dℜ . The convex hull of the nearest neighbor set of Voronoi vertex ν denoted by )),(( νSnbconv is said to be a Delaunay cell of ν .
The Delaunay triangulation of S is a partition of the convex hull conv(S) into the Delaunay cells of Voronoi vertices together with their faces, [22].
Now we discuss the method of Delaunay triangulation method that
requires only the V–representation of the polytope.
The geometric idea behind a Delaunay triangulation of a d–polytope is to ' lift ' it on a paraboloid in dimension d+1. The following construction is very important to compute the Voronoi diagram, [22].
Let S be a set of n points in dℜ . For each point dS ℜ⊆∈ρ ,
consider the hyperplane tangent to the paraboloid 22
11 ... dd xxx ++=+ in 1+ℜd at ρ :
This hyperplane is represented by h (ρ ) as:
02 1
11
2 =+− +==∑∑ d
d
j
jj
d
j
j xxρρ
where ),...,2,1( djj = ρ are the coordinates of ρ , for each point ρ , the
equality in the above equation is replaced by the inequalities )(≥ , which yields a system of n inequalities that is denoted by 0≥− AXb . The polyhedron P in 1+ℜd of all solutions X to the system of inequality is a lifting of the Voronoi diagram to one higher dimensional space. [13], shows that the underlying convex hull algorithm uses the ' beneath – beyond ' method.

Chapter One Preliminaries
٩
Example (1.2.1): Consider the set of vertices:
).4,4(),4,0(),0,4(),2,1(),1,2(),0,0( 654321 ======= ρρρρρρS Here the volume of the polytope given by these vertices is to be determined. To do so, Delaunay triangulation is used to compute the volume of this polytope.
First, write down the system of linear inequalities in three variables as explained before. That is for each 6,...,2,1, =∈ jSjρ , apply the
inequalities:
02 3
2
1
2
1
2 ≥+−∑∑==
xxj
jj
j
j ρρ
we get a system of six inequalities
03 ≥x 0245 321 ≥+−− xxx 0425 321 ≥+−− xxx
0816 31 ≥+− xx 0816 32 ≥+− xx
08832 321 ≥+−− xxx .
The set of solutions 3ℜ∈X of the above inequalities represents a polyhedron P. By applying the cdd+ program [22], the Delaunay cells,
),,( 531 ρρρ , ),,( 321 ρρρ , ),,( 421 ρρρ , ),,( 632 ρρρ , ),,( 642 ρρρ and ),,( 653 ρρρ are obtained. The cell ),,( 531 ρρρ means the triangle which is represented by three vertices 31, ρρ and 5ρ , and similarly for the other cells. Therefore six triangles are obtained, summing the volumes of these triangles yields the volume of the polyhedron P is equal to 16.

Chapter One Preliminaries
١٠
Figure (2): represents the polyhedron P with the set of vertices ,...,, 621 ρρρ and Delaunay cells.
(iii) Triangulation by Cohen & Hickey, [13]: This recursive scheme triangulates a d- polytope P by choosing any vertex Pv ∈ as an apex and connecting it with the (d-1)–dimensional simplices resulting from a triangulation of all facets of P not containing v . To be precise, denote by kθ , dk ≤≤0 , the k- dimensional faces of P, and let η be a ' map ' which associates to each face one of its vertices.
Then the pyramids with apex )( dθη and bases among the facets 1−dθ with 1)( −∉ dd θθη form a dissection of the polytope.
Applying the scheme recursively to all 1−dθ results in a set of
decreasing chains of faces dd θθθθ ⊂⊂⊂⊂ −110 ... such that 1)( −∉ kk θθη for dk ≤≤1 . Then the set of corresponding simplices
))(),...,(),(( 10 dθηθηθη∆ is a triangulation of P.
To implement this recursive method, an extensive use of the double description as V-representation and H-representation is made by representing all faces as sets of vertices.
Note that in the case of Cohen & Hickey compared to a boundary triangulation all simplices in the facets containing the apex v are eliminated and therefore the number of simplices is usually reduced. Example (1.2.2):
Consider the polytope which is represented by set of vertices ,,,, 43210 ρρρρρ as illustrated in figure (3), let η be the 'map' which
assigns to each face of the polytope its vertex with the lowest number, so
0)( ρη =P , all facets which do not contain the vertex 0ρ are examined, that is, II, III and IV. The scheme of the Cohen and Hickey is applied to facet II with 1)( ρη =II . II is intersected with all facets not containing the vertex 1ρ , these are III, IV and V. The intersections with IV and V are empty, so this recursion is unsuccessful. The intersection with III yields the vertex 2ρ , and the fixed vertices 10, ρρ , 2ρ forms a first simplex. The other simplices obtained from III and IV is also marked in the figure (3). Therefore we have three triangles. Summing the volumes of these triangles yields the volume of the polytope.

Chapter One Preliminaries
١١
Figure (3): represents the partition of the polytope by Cohen & Hickey's triangulation method.
1.2.2 Signed decomposition method In this subsection Lawrence's volume formula, which is one of the signed decomposition methods, is discussed. (i) Lawrence's volume formula, [13]: Assume the polytope P is simple and choose a vector dC ℜ∈ and
ℜ∈q such that the function ℜ→ℜdf : which is defined by
f(X)= qXCT + is not constant along any edge that connected the vertices of the polytope P and TC is the transpose of C . Let V be the set of vertices defining the polytope P. For each vertex Vv ∈ , let vA be the
dd × – matrix composed by the rows of A which are binding at v. Then by using [13], vA is invertible and [ ] CAT
v
v 1−=γ . The assumption imposed
on C assures that none of the entries of vγ is zero. It is shown that
∑∏∈
=
+=Vv
d
i
v
iv
dT
Ad
qvCPVol
1
det!
)()(
γ
To illustrate this method, consider the following example.
Example (1.2.4) : Consider the polytope P which is described by the following
constraints 01 ≤− x 02 ≤− x 21 ≤x 22 ≤x 321 ≤+ xx then

Chapter One Preliminaries
١٢
−−
=
11
10
01
10
01
A ,
=
2
1
x
xX and
=
3
2
2
0
0
b
It is easy to check that the polytope of this example is simple, therefore the Lawerence volume formula can be applied. Define a function f by 21)( xxXf −= where )1,1( −=TC and q = 0. Note that f (X) is non – constant on each edge of the polytope in the figure (4), for example, on edge (1) which connect
21 and vv , 02 =x and 1x varies from
0 to 2. Therefore f (X) = 1
x which varies from 0 to 2 which means that it is nonconstant on edge (1) and similarly on each edge of P. According to figure (4), it is seen that the set of vertices, which represents the polytope, is )2,0(),2,1(),1,2(),0,2(),0,0( 54321 ===== vvvvv .
Now, consider )0,0(1 =v , this vertex satisfies the first two constraints, and this implies that
−−
=10
011v
A , hence 1det1
=vA and [ ]
= −
2
11
1
1
c
cAT
v
vγ
−=
−
−−
=1
1
1
1
10
011vγ
and for )0,2(2 =v , this vertex satisfies the second and third constraints, that is,
−=
10
012vA , 1det
2=
vA And [ ]
=
−= −
1
1
1
11
2
2 T
v
v Aγ
And similarly for the other vertices we get
−=
1
23vγ ,
−=
1
24vγ And
−−
=1
15vγ
Then Lawrence's volume formula is applied to get the volume of P.

Chapter One Preliminaries
١٣
∑∏∈
=
=Vv
i
v
iv
T
A
vCPVol 2
1
2
det !2
)()(
γ
( ) ( )
)1)(1)(1(!2
2
)1)(2)(1(!2
1
)1)(2)(1(!2
1
)1)(1)(1(!2
2
)1)(1)(1(!2
0 22222
−−−+
−−+
−++
−=
2
132414120 =+−+−++= )/()/( .
Figure (4): represents a polytope with the vertices 54321 ,,, vandvvvv 1.3 Methods for computing integral points The main objective of this section is to recall some methods for finding integral points of a polyhedron. In this work, we use the symbol
dP ΖI to denote the number of integral points in the polyhedron P,
where dΖ is the integer lattice and P is a rational polyhedron. These methods are: Method (1), [4]:
For d = 2, 2ℜ⊂P and P is an integral polyhedron. The famous formula, [42, p.240] states that
12
)(2
2 +Ζ∂
+=ΖI
IP
PareaP
That is, the number of integral points in an integral polyhedron is
equal to the area of the polyhedron plus half the number of integral points on the boundary of the polyhedron plus one. This formula is useful because it is much more efficient than the direct enumeration of integral points in a polyhedron. The area of P is computed by triangulating the polyhedron. Furthermore, the boundary ∂P is a union of finitely many straight-line intervals, and counting integral points in intervals is easy.

Chapter One Preliminaries
١٤
Method (2), [4]:
Let dP ℜ⊂ be a polytope, then one can write the number of integral points in P as dP ΖI ∑
Ζ∈
=dX
PX ),(δ
where
∉∈
=PXif
PXifPX
0
1),(δ
Before we give the next method, we need the following definition.
Definition (1.3.1), [2, p.61]: The Dedekind sum of two relatively prime positive integers a and b
denoted by ),( baS can be defined as follows,
∑=
=b
i b
ai
b
ibaS
1
),(
where
Ζ∈
Ζ∉−−=xif
xifxxx0
2
1))((
and x is the greatest integer x≤ . Remarks (1.3.1):
Dedekind sums appear in various branches of mathematics: the number theory, algebraic geometry and topology. These include the quadratic reciprocity law, random number generators [32], and lattice point problems [19]. More details about Dedekind sums are given in chapter two
Now, we are in a position that we can explain the following
method.
Method (3), [4]: Let 3ℜ⊂∆ be the tetrahedron with vertices (0, 0, 0), (a, 0, 0),
(0, b, 0), (0, 0, c) where a, b and c are pairwise coprime positive integers, then the number of integral points in ∆ can be expressed as:

Chapter One Preliminaries
١٥
),(),(
),()1
(12
1
463
cabSbacS
abcSabcc
ab
a
bc
b
accbabcacababcP
−
−−++++++++++=ΖI
This formula is useful because it reduces counting the number of
integral points to a computation of Dedekind sums, which can be done efficiently. Method (4), [4]:
Let dP ℜ⊂ be an integral polytope, for positive integer t, let tP=tX : X∈P denote the dilated polytope P. By [42, p.238] there is a polynomial p(t) called the Ehrhart polynomial of P )(tptP d =ΖI
where p(t) = 0
1
1 ... atata d
d
d
d +++ −−
furthermore, 10 =a and da is the volume of the polytope P. To illustrate these methods, consider the following examples. Example (1.3.1):
Let us consider three points in two dimensions such that )0,0()0,1(),1,0( 321 === vandvv . Then the convex hull of 321, vandvv
is a triangle in two dimensions.
We compute the number of integral points by these methods. From method (1), one can have
12
)(2
2 +Ζ∂
+=ΖI
IP
PareaP
the area of triangle, is area(P)=0.5(1)(1)=0.5 and 32 =Ζ∂ IP which
represents the number of integral points on the boundary of the triangle. Then the number of integral points of the triangle is .31)3(5.05.02 =++=ΖIP
In method (2), we have 2ΖIP ∑
Ζ∈
=2
),(X
PXδ

Chapter One Preliminaries
١٦
1),()1,0( 11 =∈= PvthenPv δ
1),()0,1( 22 =∈= PvthenPv δ
1),()0,0( 33 =∈= PvthenPv δ therefore 31112 =++=ΖIP , which is the number of integral points for
the triangle. Form method (4), one can have =Ζ2
IP 112 ++ aa
where 2a is the volume of the polytope and 1a is the half number of integral points on the boundary of the polytope. In this case,
2a = 0.5(1)(1)=0.5 and 2a = 3/2
therefore 315.15.02 =++=ΖIP .
Example (1.3.1):
Let us consider the tetrahedron 3ℜ⊂∆ with vertices (0,0,0), (3,0,0), (0,5,0), (0,0,7).
Form method (3), the number of integral points in ∆ can be
expressed as,
),(),(),(
)1
(12
1
463
cabSbacSabcSabcc
ab
a
bc
b
accbabcacababcP
−−−
++++++++++=ΖI
here a=3, b=5 and c=7. Therefore
)7,15()5,21(
)3,35()105
1
7
15
3
35
5
21(
12
1
4
753352115
6
1053
SS
SP
−−
−++++++++++=ΖI
After simple computation one can get, S(35,3)=-0.05555, S(21,5)=0.2, S(15,7)= 0.35714, Thus .4035714.02.005555.0501877.15.215.173 =−−+++=ΖIP

Chapter Two Computing the Volume and Integral Points of V-
Representation of a Polytope Using Ehrhart Polynomial
Introduction As was shown in chapter one, the Ehrhart polynomial of a convex lattice polytope counts the number of integral points in an integral dilate of the polytope. E. Ehrhart proved that the function which counts the number of lattice points that lie inside the dilated polytope tP is a polynomial in t and it is denoted by L(P,t), which is the cardinal of
)( dtP ΖI where dΖ is the integer lattice in dℜ , [4]. Many of Ehrhart's valuable results are unknown by mathematician and computer science community at this time, since many of these results have been published in local reports and in French language, [4].
In this chapter we present some methods for computing the coefficients of Ehrhart polynomial that depend on the concepts of Dedekind sum and residue theorem in complex analysis. Also, a method for computing the coefficients of the Ehrhart polynomial is introduced with general formula that counts the derivatives in the introduced method. For our knowledge this method seems to be new. The polytopes that we take are with V – representations.
This chapter consists of six sections. In section one, some basic
definitions and remarks concerning the Ehrhart polynomial are given. Section two gives a method for finding the Ehrhart polynomial of the polytope using the formula of the Dedekind sum. Another method for finding the Ehrhart polynomial using residue theorem in complex analysis is presented in section three. In section four the Ehrhart coefficients are computed and in section five, we give a method for
computing 3−dc , 4−dc until 9−dc of the Ehrhart polynomial, the general formula for the differentiation is given in section six.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
١٨
2.1 Basic concepts about Ehrhart polynomials As seen before, the Ehrhart polynomial is very important in many fields of mathematics. Therefore some methods for finding the coefficients of this polynomial are to be listed. To do so, some basic definitions, theorems and remarks are given in this section. We start this section by the following definitions Definition (2.1.1), [19]: Let dℜ⊂Ρ be a lattice d-polytope. For +Ζ∈t , the set tP=tX : X ∈P is said to be the dialeted polytope. The definition of the Ehrhart polynomial is given below Definition (2.1.2), [42, p.235 ]:
Let dℜ⊂Ρ be a lattice d-polytope. Define a map Ν→Ν:L by
L(P,t) = card(tP dΖI ), where 'card' means the cardinality of (tPdΖI ) and N is the set of natural numbers. It is seen that L(P,t) can be represented
as: L(P,t) =1+∑=
d
i
iitc
1
, this polynomial is said to be the Ehrhart polynomial
of a lattice d-polytope P.
Remark (2.1.1): Let 2ℜ⊂Ρ be a lattice 2-polytope, the Ehrhart polynomial of P is
given by
L (P,t) = 12
12 +Β+Α tt
where A is the area of the polytope and B is the number of lattice points on the boundary of P, [28]. Theorem (2.1.1), [8]: Let dℜ⊂Ρ be a lattice d-polytope, with the Ehrhart polynomial
L(P,t) =∑=
d
i
i
itc0
. Then dc is the volume of P, while the constant term is
one, which is equal to the Euler characteristic of P.
The other coefficients of L(P,t) are not easily accessible. In fact, a method of computing these coefficients was unknown until quite recently, [4], [12] and [19].

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
١٩
Before we give the next theorems, we need the following definitions:
Definition (2.1.3), [35, p.86]: Let P be a polytope which is defined by : bAXXP d ≤ℜ∈= ,
X∈Ρ is said to be an interior point of Ρ if ii bXa < for i=1,2,…,m. , where
ia is the i-th row of the matrix A, ib is the i-th row of the vector b and m<d. Definition (2.1.4), [42, p.18]: Let k and j be two given positive integer and c(k,j) is the number of permutations ),...,( 1 kcc=π with exactly j cycles. Then the Stirling numbers of the first kind of k and j, denoted by S1(k,j), are defined as
),()1(),(1 jkcjkS jk−−= , and c(k,j) can be found from the recurrence
relation c(k,j)=(k-1)c(k-1,j)+c(k-1,j), k,j ≥1,
Theorem(2.1.2),(The reciprocity theorem for Ehrhart polynomial), [42 ,p.238], [19]:
The function L(P,t) satisfies the reciprocity law:
L (P,-t) = (-1) Pdim L(P o ,t) where Po is the interior of P and t is an integer. Remark (2.1.2): From theorem (2.1.2) the study of the polytope Po is essentially equivalent to the study of the polytope P, where Po is the interior of P.
A linear relation satisfied by the coefficients of all Ehrhart polynomials is established by [8] which is a continuation of the pioneering work of [Stanley,1980,1991; Betke&Mcmullen, 1985; Hibi,1995] in [8] who established several relations of linear inequalities for the coefficients and are given in the following theorems. Theorem (2.1.3), [8]: Let dℜ⊂Ρ be a lattice d-polytope with the Ehrhart polynomial
L(P,t)= ∑=
+d
i
i
itc1
1 then, )!1(
)1,()1(),()1( 11
1 −+−+−≤ −−−
d
rdScrdSc rd
d
rd
r for
r=1,2,…, d-1, where S1(k, j) denotes the Stirling numbers of the first kind of k and j.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٠
Theorem (2.1.4), [8]: Let dℜ⊂Ρ be a lattice d-polytope with the Ehrhart polynomial
L(P,t)= ∑=
+d
i
i
itc1
1 . Then the following inequalities are valid:
!
1
dcd ≥
)!1(2
11 −
+≥− d
dcd
∑=
− ≥−d
ii
id c0
0)1( .
2.2 Counting integral points using Dedekind sums In this section we describe the relation between the Dedekind sum and the Ehrhart polynomial of a polytope and discussed a theorem that counts the number of integral points in a polytope. This section starts by some basic definitions and remarks that are useful to discuss the method for counting the integral points of a polytope.
Recall that the Dedekind sum of two relatively prime positive integers a and b, denoted by S(a,b), is defined as
∑=
=b
i b
ai
b
ibaS
1
))))((((),(
where
Ζ∈
Ζ∉−−=xif
xifxxx0
2
1))((
and x is the greatest integer x≤ . Remark(2.2.1): The discrete Fourier expansions can be used to rewrite the Dedekind sum in terms of the Dedekind cotangent sum, that is, for two relatively prime positive integers a and b:
∑=−
=
1
1)cot()cot(
4
1),(
b
k b
k
b
ka
bbaS
ππ
where S(a,b) is the Dedekind sum of a and b, [2, p. 72].

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢١
Theorem (2.2.1), [5]: Let P denote the simplex in dℜ with the vertices (0,0,…,0), ( 1a ,0,…,0),(0, 2a ,0,…,0),…,(0,…,0, da ), where Ν∈daa ,...,1 are relatively
prime. Denote the corresponding Ehrhart polynomial by ∑=
=d
j
j
jtctPL0
),( .
Then mc is the coefficient of )1( +− ms in the Laurent series at s = 0 of
++
++
++
++∑
=−
+
))(coth(1
))(coth(1...))(coth(1))(coth(12! 1 21
1
irs
irsa
irsa
irsam dr
md
m
ρπ
πππρ
π ρ
where daa ...1=ρ . Definition (2.2.2) [34, p. 29]: Let K be a closed bounded convex set in dℜ . Then a hyperplane H of dℜ is said to support K if φ≠KH I , and K is contained in one of the closed half - spaces determined by H. Theorem (2.2.2), (Dedekind's reciprocity law), [5]: For two relatively prime positive integers a and b
+++−=+a
b
abb
aabSbaS
1
12
1
4
1),(),( (2.1)
Proof: Let P denote a simplex in 2ℜ with the vertices (0,0), (a,0), (0,b), where a, b∈N are relatively prime. From theorem (2.2.1), 0c is the
coefficient of 1−s in the Laurent series at s = 0 of
++
++
++∑=
))(coth(1))(coth(1))(coth(14 1
irsab
irsb
irsaab
ab
r
ππππ
(2.2) The Laurent series of each factor depends on r: that is for any Ν∈c , we
write the series of ))(coth1( irsc
++ π such that c divides r or not.
To illustrate this, we consider these two cases: First case: if c divides r, then there exists an integer m such that r = mc therefore,

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٢
( )
+=
++=
++c
smi
c
sirs
c
πππcoth1coth1coth1
it is known that, Laurent series of coth(z) about z = 0 is:
π<+++−+= zz
z
n
Bzz
zz
n
n ...,)2(
)!2(...
45
1
3
11)coth(
2
23
where the sBn ' are Bernoulli numbers that are defined by the following steps:
Step (1): Expand 1
1
−Ze as
12
0
122
11
1
1 +∞
=+∑+−=
−i
i
iZzA
ze
where ,...30240
1,
720
1,
12
1531 =−== AAA
Step (2): Define, the n-th Bernoulli number nB by, [29, p.6]
11 =B , )!2(
)1( 21
12 n
BA nn
n
−− −= and 012 =+nB for n=1,2,…
By replacing z by c
sπ in coth(z) we get
1),(3
)coth( 3 <Ο++=c
sss
cs
c
c
s ππ
π
Let )(3
1)coth(1 31 ssc
sc
c
sSc Ο+++=+= − π
ππ .
Second case: assume that c does not divide r.
Let ))(coth1()( irsc
sf ++= π
then )coth(1)0(c
rif
π+=
also
+π
+ππ=′ )(coth)(csc)( irsc
irsc
hc
sf then
).coth()(csc)0(c
ir
c
irh
cf
πππ=′
Therefore, the Maclaurin series of f(s) takes the form
=cR )()coth(1 sc
ri Ο++ π .
Therefore, from the above one can get

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٣
If c|r then )(3
1 31 ssc
sc
Sc Ο+++= − ππ
and
If c ∤ r then )()coth(1 sc
riRc Ο++= π
Introduce the notation
χ =c
r cif0
r cif1
so ))(coth1( irsc
++ π can be written as
)1(RS)irs(c
coth1 cccc χχπ −+=
++ and (2.2) becomes
( )∑=
−+−+−+ab
rababababbbbbaaaa RSRSRS
ab 1
))1())(1())(1((4
χχχχχχπ
Expand this into eight terms, which are
(
))1)(1)(1()1)(1( )1(
)1( )1()1)(1(
)1()1(4 1
babaabbabaabababab
aaabbbaaababbbbababbaa
ab
rbbababaaababbbaaababbbaa
RRRRRS
RRSRSSRRS
RSSRSSSSSab
χχχχχχχχχχχχχχχ
χχχχχχχχχπ
−−−+−−+−−+−+−−
+−+−+∑=
and consider each term according to the number of cS factors 1. Terms with one cS factor are
)()1()1()1( abaabbaababbaabbaababbbaa RRSRRSRRS χχχχχχχχχ −=+−−=−− (2.3) and similarly
)()1()1( abbababababaabb RRSRRS χχχχχ −=−− (2.4)
The term with abS is zero (note that ababbaba χχχχχ == and
abbaχχχ = ).
To compute the contribution of (2.3) we need the support
of aba χχ − in 1,2, …, ab which is 1bk1ka −≤≤•• ;
thus its contribution to (2.2) is,

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٤
))coth(1))(coth(1(4
1
1∑
−
=
++b
r ab
ika
b
ikaa
ab
πππ
π
))cot(1))(cot(1(4
1 1
1∑
−
=
−−=b
r b
ki
b
kai
b
ππ
−
−+
−= ∑−
= b
kcot
b
kacoti
b
kcot
b
kacot1
b4
1 1b
1r
ππππ
The imaginary part in the preceding sum is zero, because the original generating function is real. The obtained result is
),(4
1
4
1baS
b−− .
Similarly (2.4) gives a contribution of ),(4
1
4
1abS
a−− .
2. There are no terms with two cS factors,
0)1()1( =−=− abababbaababbbaa RSSRSS χχχχχ and
0)1()1( =−=− bababbaababbbaa SRSSRS χχχχχ 3. Finally, the term ababbaababbbaa SSSSSS χχχχ = has a support ab, and gives a contribution of
)333
(4 πππ
πππ
πππ
πππ
π abba
a
abb
a
aba
ab
ba
ab+++++
).111
(4
1)
1(
12
1 +++++=aba
b
b
a
ab
Adding all contributions, with the fact that 0c is the coefficient of 1−s in the Laurent series at s = 0 of (2.2) and 10 =c , [42, p.235] we get
),(),()1
(12
1
4
31 abSbaS
a
b
b
a
ab−−+++=
Then

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٥
)1
(12
1
4
1),(),(
a
b
abb
aabSbaS +++−=+
which is the Dedekind reciprocity law. 2.3 Counting integral points using the residue theorem This section is concerned with a method given in [6] to count the integral points of a given polytope by means of the residue theorem.
To do so, let dd ℜ⊂Ζ be a d–dimensional integer lattice, so the
polytope oP is defined as
><ℜ∈= ∑=
01:),...,(1
1 k
d
k k
kd
d xanda
xxxPo , with
vertices )a,0,...,0(),...,0,...,0,a,0(),0,...,0,a(),0,...,0,0( d21 , where d21 a,...,a,a are positive integers.
Recall that for Ν∈t , L(P,t) is the number of integral points in the
dilated polytope tP. Let us use the notation: d21 a...aaA = , dk21k a...a...aaA = (where ka
means the factor ka is omitted). Then L(P,t) can be written as,
≥≤∈= ∑=
0mallandta
m:)m...,m,m(card)t,P(L k
d
1k k
kdd21 Ζ .
Thus
ta...aa
)a...aa(m...)a...aa(m)a...aa(m
d21
1d21dd312d321 ≤+++ −
In other words,
tA
AmAmAm dd ≤+++ ...2211
Therefore,
AtAmd
kkk ≤∑
=1
Hence, there exists a non negative real number m such that
0m,m,AtmAm k
d
1kkk ≥=+∑
=

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٦
Therefore, by using [6] one can get,
=+∈= ∑=
≥
+ tAmAm:)m,m,...,m(card)t,P(Ld
1k0m,km
kk
1d
d1 Ζ
L(P,t) can be interpreted as the Taylor coefficient of tAΖ for the function
.1
1
1
1...
1
1
1
1
...)1...)(1...)...(1...)(1(
...
21
2211
2
22
1
11
2222
0000
Ζ−Ζ−Ζ−Ζ−=
+Ζ+Ζ++Ζ+Ζ++Ζ+Ζ++Ζ+Ζ+=
Ζ⋅ΖΖ⋅Ζ ∑∑∑∑
====
d
dd
d
dd
AAA
AAAAAA
m
m
m
Am
m
Am
m
Am
Equivalently
=ΖΖ−Ζ−Ζ−Ζ−
Ζ=−−
0,)1)(1)...(1)(1(
Re),(21
1
dAAA
tA
stPL
=Ζ
Ζ−Ζ−Ζ−Ζ−Ζ+Ζ−Ζ
=−−
0,)1)(1)...(1)(1(
11Re
21
1
dAAA
tA
s
+
Ζ−Ζ−Ζ−Ζ−Ζ−Ζ
=−−
)1)(1)...(1)(1(
1Re
21
1
dAAA
tA
s
=Ζ
Ζ−Ζ−Ζ−Ζ−Ζ 0,
)1)(1)...(1)(1(
1
21 dAAA
+
=Ζ
ΖΖ−Ζ−Ζ−Ζ−−Ζ=
−
0,)1)(1)...(1)(1(
1Re
21 dAAA
tA
s
=Ζ
ΖΖ−Ζ−Ζ−Ζ−0,
)1)(1)...(1)(1(
1Re
21 dAAAs
then
),( tPL 10,)1)(1)...(1)(1(
1Re
21+
=ΖΖΖ−Ζ−Ζ−Ζ−
−Ζ=−
dAAA
tA
s (2.5)

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٧
Let ΖΖ−Ζ−Ζ−Ζ−
−Ζ=Ζ−
− )1)(1)...(1)(1(
1)(
21 dAAA
tA
tf
Expression (2.5) counts the number of lattice points in tP. Therefore we need to compute the residue of )(Ζ−tf at Z=0 and use the residue theorem for the sphere ∞UC . In this notation,
1)0),((Re),( +=ΖΖ= −tfstPL (2.6)
Let djk1 ,1 :1\C jkaa
A
≤<≤=∈= ΖΖΩ The roots of )(Ζ−tf of unity in Ω, 0 and 1 are the only poles of )(Ζ−tf Now, by [21, p. 273] one can get
=ΖΖ
=∞=ΖΖ −− 0),1
(Re)),((Re tt fsfs . Therefore,
)1)(1)...(1(
)1()
1(
1
21 1...
−Ζ−Ζ−ΖΖ−Ζ=
++++
− d
d
AA
AAAtA
t zf
then, 0)0,1
(Re =
=ΖΖ−tfs .
The following lemma is needed for proving the next theorem.
Lemma (2.3.1), [20, p.204]:
The sum of the residues of a rational function at all the poles in the finite plane, together with the residue at infinity, is zero.
This theorem appears in [6] without a proof. Here, we prove it for
the sake of completeness.
Theorem (2.3.1), [6]: Let P be a polytope defined as
>≤ℜ∈= ∑=
01:),...,(1
1 k
d
k k
kd
d xanda
xxxP , (2.7)
with vertices )0,...,0,a(),0,...,0,0( 1 , ),0,...,0(),...,0,...,0,,0( 2 daa ,where

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٨
daa ,...,1 are positive integers, and )(Ζ−tf and Ω are defined as
ΖΖ−Ζ−Ζ−Ζ−−Ζ=Ζ
−
− )1)(1)...(1)(1(1
)(21 dAAA
tA
tf ,
and
djk1 ,1 :1\C jkaa
A
≤<≤=∈= ΖΖΩ , then
)),((Re)1),((Re1),( ∑Ω∈
−− =ΖΖ−=ΖΖ−=λ
λtt fsfstPL .
Proof: Using lemma (2.3.1), the poles of )(Ζ−tf are at 1, 0 and the roots
of unity therefore,
0)),((Re
)),((Re)1),((Re)0),((Re
=∞=ΖΖ+
=ΖΖ+=ΖΖ+=ΖΖ
−
Ω∈−−− ∑
t
ttt
fs
fsfsfsλ
λ
So )),((Re)1),((Re)0),((Re ∑
Ω∈−−− =ΖΖ−=ΖΖ−==ΖΖ
λ
λttt fsfsfs
After substations the results in (2.6), we get
)),((Re)1),((Re1),( ∑Ω∈
−− =ΖΖ−=ΖΖ−=λ
λtt fsfstPL .
Theorem(2.3.2), [6]:
Let P be a lattice d-polytope given by expression (2.7). Then, the function L(P,t) is a polynomial in t. Proof: Let Ω∈λ be a B-th root of unity, where B is the product of some of the sak ' . Express tA−Ζ in terms of its power series about λ=Ζ . The
coefficients of this power series involve various derivatives of tA−Ζ , evaluated at λ=Ζ . Introduce a change of variable:
( )ωωΖ logB/1expB1
== . A suitable branch of the logarithm is chosen such that ( ) λ=)1log(B/1exp . The terms depending on t in the power
series of tA−Ζ consist therefore the derivatives of the function BtA−
Ζ , evaluated at z=1. For this, the coefficients of the power series of tA−Ζ are polynomials in t. The fact that L(P,t) is simply the sum of all these residues, L(P,t) is a polynomial in t.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٢٩
2.4 The Ehrhart coefficients In this section, some details for deriving formula of Ehrhart coefficients are given. For each coefficient of the Ehrhart polynomial
0
1
1 ...),( ctctctPL d
d
d
d +++= −− .
A formula for finding these coefficients can be derived with a small modification of )(Ζtf .
Consider the function,
ΖΖ−Ζ−Ζ−Ζ−−Ζ=Ζ
−
)1)(1)...(1)(1(
)1()(
21 dAAA
ktA
kg
ΖΖ−Ζ−Ζ−Ζ−
−Ζ
=Ζ
−−
=∑
)1)(1)...(1)(1(
)1(
)(21
)(
0
dAAA
jjktAk
j
k
j
k
g
If 0)1(0
=−
−∑
=
jk
j j
k is inserted in the numerator of the above equation, we
get
ΖΖ−Ζ−Ζ−Ζ−
−
−−Ζ
=Ζ∑∑
=
−−
=
)1)(1)...(1)(1(
)1()1(
)(21
0
)(
0
dAAA
k
j
jjjktAk
j
k
j
k
j
k
g
∑−
=
−−
ΖΖ−Ζ−Ζ−Ζ−
−Ζ−
=Ζ1
0
)(
)1)(1)...(1)(1(
)1()1(
)(21
k
jAAA
jktAj
k d
j
k
g
∑−
=−− Ζ−
=
1
0
)( )()1(k
j
jkt
j fj
k
Recall that, 1)0 ),(f(sRe)t,P(L t +== − ΖΖ , using this relation, we obtain,
)0,)()1((Re)0),((Re1
0
)( =ΖΖ−
==ΖΖ ∑
−
=−−
k
j
jkt
j
k fj
ksgs

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٠
)0,)((Re)1(1
0
)( =ΖΖ−
=∑−
=−−
k
j
jkt
j fsj
k
∑−
=
−−−
=
1
0
)1))(,(()1(k
j
j tjkPLj
k
∑ ∑−
=
−
=
−
−−−
=1
0
1
0
)1())(,(()1(k
j
jk
j
j
j
ktjkPL
j
k
∑−
=
−+−−
=Ζ1
0
)1())(,(()1()(k
j
kj
k tjkPLj
kg .
The following lemma is needed to derive the formula of the
coefficients of the Ehrhart polynomial. But, before that we give the definition of the Stirling number of the second kind and its properties.
Definition(2.4.1), [42, p. 33]: The Stirling number of the second kind ),(2 kmS is defined as, the number of partitions of an m –set into k – blocks.
The following properties of ),(2 kmS are known, [42, p. 33-35].
0),(2 =kmS if k > m (2.8) 1)1,(2 =mS (2.9) 1),(2 =mmS (2.10)
∑=
−−
=k
j
mjk jj
k
kkmS
0
2 )1(!
1),( (2.11)
)1,1(),1(),( 222 −−+−= kdSkdkSkmS Lemma(2.4.1), [6]:
Suppose that 0
1
1 ...),( ctctctPL d
d
d
d +++= −− , then for dk ≤≤1
∑=
==d
km
mm2k tc)k,m(S!k)0),(g(sRe ΖΖ
where ),(2 kmS denotes the Stirling number of the second kind of m and k
and 0c =1. Proof:
Suppose that
∑ ∑−
= =
=−−
1
0 0,))(,()1(
k
j
d
m
mmk
j tbtjkPLj
k (2.12)

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣١
So that for m > 0,
∑ ∑−
= =
−−
=−−
=
1
0 0
, )1()()1(k
j
k
j
mjk
m
m
m
j
mk jj
kcjkc
j
kb
using the identity (2.11) of the Stirling number so ),(! 2, kmSkcb mmk = for m > 0.
and by formula (2.8), we conclude that 0, =mkb for km <≤1 . The
constant term in formula (2.12) is
∑−
=
−−=−
=1
0
000, )1()1(k
j
kj
k ccj
kb
Therefore,
∑ ∑−
= =
=−−
1
0 02 ),(!))(,()1(
k
j
d
m
mm
j tkmSkctjkPLj
k
∑=
−−=d
km
km
m tkmSck )1(),(! 2
Then,
∑ ∑−
= =
=−+−−
1
02 ),(!)1())(,()1(
k
j
d
km
mm
kj tkmScktjkPLj
k
Therefore,
∑=
==ΖΖd
km
m
mk tckmSkgs ),(!)0),((Re 2.
The following theorem appears in [6] without proof. Here we prove
it for the sake of completeness. Theorem (2.4.1), [6]:
Let P be a lattice d-polytope given by expression (2.7), with the Ehrhart polynomial 0
1
1 ...),( ctctctPL d
d
d
d +++= −− , then for dk ≤≤1
))),((Re)1),(((Re!
1),(2 λ
λ∑∑
Ω∈=
=ΖΖ+=ΖΖ−=k
kk
d
km
m
m gsgsk
tckmS

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٢
where dj...jj1 ,1 :1\C 1k21
a...a
A
k1kj1j ≤<<<≤=∈= +
+ΖΖΩ Proof:
Since )0,)()1((Re)0),((Re1
0)( =ΖΖ−
==ΖΖ ∑
−
=−−
k
jjkt
j
k fj
ksgs
and from
∑Ω∈
−−− =ΖΖ−=ΖΖ−==ΖΖλ
λ)),((Re)1),((Re)0),((Re ttt fsfsfs
therefore,
∑Ω∈
−−−−−− =ΖΖ−=ΖΖ−==ΖΖλ
λ)),((Re)1),((Re)0),((Re )()()( jktjktjkt fsfsfs
Now
)]),((Re)1),(([Re)1(
)0,)((Re)1(
)()(
1
0
1
0)(
λ=ΖΖ+=ΖΖ−
−=
=ΖΖ−
∑∑
∑
Ω∈λ−−−−
−
=
−
=−−
jktjkt
jk
j
k
jjkt
j
fsfsj
k
fsj
k
∑
Ω∈λ
λ=ΖΖ−=ΖΖ−==ΖΖ )),((Re)1),((Re)0),((Re kkk gsgsgs
By using lemma(2.4.1) we get
))),((Re)1),(((Re!
1),(2 λ
λ∑∑
Ω∈=
=ΖΖ+=ΖΖ−=k
kk
d
km
m
m gsgsk
tckmS .
The following corollary appears in [6] without proof. Here we prove
it for the sake of completeness.
Corollary (2.4.1), [6]: For m > 0, mc is the coefficient of mt in
))),((Re)1),(((Re!
1 λ=ΖΖ+=ΖΖ−∑
Ω∈λ m
mm gsgsm

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٣
Proof:
By using the fact that 1),(2 =mmS in theorem (2.4.1), we get the result of corollary (2.4.1).
Now, we give the following proposition with its proof, which we
need for proving the next theorem. Proposition (2.4.1), [20, p. 265]:
Let f (z) be analytic inside and on a simple closed curve C except at a pole a of order m inside C. The residue of f (z) at a is given by
)()()!1(
1lim
1
1
1 zfazdz
d
ma m
m
m
az−
−=
−
−
→− (2.13)
Proof:
If f (z) has a pole a of order m, then the Laurent series of f (z) at a is
...)()(...)()(
)( 2
2101
1
1 +−+−++−
++−
+−
= −−
+−− azaazaaaz
a
az
a
az
azf
m
m
m
m
Then multiplying both sides by maz )( − , we have
...)()(...)()()( 0
1
11 +−+−++−+=− −−+−−
mm
mm
m azaazaazaazfaz (2.14) From Taylor's theorem one can see that the coefficient of 1)( −− maz in the expansion (2.14) is
)()()!1(
1lim
1
1
1 zfazdz
d
ma m
m
m
az−
−=
−
−
→− .
Remark(2.4.1):
We know that from the definitions of the Ehrhart polynomial, the leading coefficient is the volume of the polytope and the constant term is one; these are termed as the trivial coefficient of the Ehrhart polynomial, the other coefficients are nontrivial.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٤
Theorem (2.4.2) [6]:
Let dℜ⊂Ρ be a lattice d-polytope, with vertices )0,...,0,0( , ),...,0,0(),...,0,...,0,( 1 daa where d21 a...,a,a are pairwise relatively prime
integers. The first nontrivial Ehrhart coefficients 2−dc , 3d ≥ is given by,
)),(...),(()!2(
1112 dddd aASaASC
dc −−−
−=−
where ),( baS denotes the Dedekind sum and
)...1
(12
1)...(
4
1
1
1,12,1
d
dddd a
A
a
A
AAAdC +++++++= − ,
d21 a...aaA = , dk21k a...a...aaA = (where ka means the factor ka is omitted),
and kjA , denotes dkj aaaa ...ˆ...ˆ..1 .
Proof:
Consider ΖΖ−Ζ−Ζ−Ζ−
−Ζ=Ζ−−
− )1)(1)...(1)(1(
)1()(
21
2
2 dAAA
dtA
dg
since d21 a,...,a,a are pairwise relatively prime, ( )Zgd 2− has simple poles
at the d21 a,...,a,a - th roots of unite. Let λλ ≠= 11a . Then,
λ=Ζ
Ζ−Ζ−Ζ−−Ζ
λλ−λ−=λ=ΖΖ
−−
− ,)1)...(1)(1(
)1(Re
)1)(1(
1)),((Re
321
2
2 dAAA
dtA
Ad sgs
A change of variable
== ωωΖ logB
1expB
1 is made, where a suitable
branch of logarithm such that λ=
)1log(
a
1exp
1
, thus
=−−
−−−
==ΖΖ−−
− 1,)1)...(1(
)1(Re
)1)(1(
1)),((Re
21
2
1
2 ωωω
ωλλλλ
λdBB
dtB
Ad sa
gs
where dkkd aaaBaaB ...ˆ...,,..., 22 == . We change ω by Z. Claim
22
1,)1)...(1(
)1(Re
2
−−−
−=
=ΖΖ−Ζ−
−Ζ d
BB
dtB
tsd
to prove this, first note that the Taylor series of 2)1( −− −Ζ dtB about Z = 1 is

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٥
))1(()1()()1( 2222 −−−−− −ΖΟ+−Ζ−=−Ζ ddddtB tB Now for Ν∈m
m
1
1
1lim1,
1
1sRe
m1m
−=−
−=
=− → Ζ
ΖΖΖ Ζ
Putting all of this together, we obtain
))...((
)(1,
)1)...(1(
)1(Re
2
22
2
d
d
BB
dtB
BB
tBs
d −−−=
=ΖΖ−Ζ−
−Ζ −−−
2d
2d
d
2d
2
2d
d
2d
22d
ta ...a
a ...at −−−
−−−
−=−=
as desired. Therefore
)1)(1()),((Re
1
1
2
2 λλλ
−−−==ΖΖ
−
− A
d
d a
tgs
Adding up all the residues at the tha −1 roots of unity ≠ 1, we get
∑≠=
− =ΖΖλλ
λ1
21
)),((Rea
dgs ∑−
=
−
−−−=
1
11
2 1
1 )1)(1(
1a
kkkA
d
a
t
ξξ
where ξ is a primitive tha −1 roots of unity. This finite sum is practically a Dedekind sum:
∑∑−
=
−
=
−++
−++=
−−
1a
1kk
k
kA
kA
1
1a
1kkkA
1
1
1
11
1 1
11
1
11
a4
1
)1)(1(
1
a
1
ξξ
ξξ
ξξ
After simple computations one can get,
∑−
= −−
1
11
1
1 )1)(1(
11 a
kkkAa ξξ
)1(4
11
1
−= aa
−− ∑−
=
1
1 11
1
1
1
cotcot4
1 a
k a
k
a
kA
a
ππ
∑−
=
+
1a
1k 11
1
1
1
a
kcot
a
kAcot
a4
i
ππ
the imaginary terms disappear and the cotangent sum can be rewrite in terms of the Dedekind sum , so we get

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٦
∑−
= −−
1
11
1
1 )1)(1(
11 a
kkkAa ξξ
),(4
1
4
111
1
aASa
−−=
and therfore
∑≠=
−−
−−−==
λλ
λΖΖ1
11
1
2d
2d1a
)a,A(Sa4
1
4
1t)),(g(sRe .
Similar expressions for the residues at the other roots of unity are obtained, so that corollary (2.4.1) give us for 3≥d
−−−
+++−−
−=− )a,A(S...)a,A(S
a
1...
a
1
a
1
4
1C
4
d
)!2d(
1c dd11
d21
2d
(2.15) where C is the coefficient of 2−dt of )1),((Re 2 =ΖΖ−dgs , Next, )0),((Re)1),((Re 22 =Ζ==ΖΖ Ζ
−− egesgs d
Z
d
=Ζ−−−−
−=ΖΖΖΖ
−Ζ−
0,)1)(1)...(1)(1(
)1(Re
21
2
eeee
es
dAAA
dtA
.
Since ))(()()1( 122 −−−Ζ− ΖΟ+Ζ−=− dddtA ttAe and
)(12
1
2
1
1
1 31 ΖΟ+Ζ−+Ζ−=−
−Ζe
,
the coefficient of 2−dt of )1),((Re 2 =ΖΖ−dgs turns out to be
+−−=
+−
d
dd
AAAC
...
)1(
12
1)(
1
12 +− +
d
d
AA
A
...
)1(
2
11
+
−+−
+
11
1
...
)1(...
d
d
d
AA
A
4
1
++− −
......
)1(
2
1
d
d
AA+−
−
−
11
1
...
)1(
d
d
AA+− −
d
d
AA ...
)1(
3
1
−+−
−
−−
21
1
42
1
...
)1(...
...
)1(
d
d
d
d
AAAAA
+++−
+++++−= −
d
ddd
d a
A
a
A
AAA
aa...
1
12
1...
1...
1
4
1
1
1,12,1
1
By substituting this into equation (2.15) we get the result.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٧
2.5 Computing 3−dc and 4−dc in The Ehrhart Polynomial
As seen before, the leading coefficient of the Ehrhart polynomial represents the volume of the polytope, the second coefficient represents half of the surface area of the polytope and the constant term is one, while the other coefficients are unknown.
In this section we find the non trivial coefficients 3−dc and 4−dc for
the d–polytope with d≥4 and d≥5 respectively, where P is represented by a list of vertices 0,...,0,0( ), ),0,...,0,( 1a )0,...,0,,0( 2a )a,0,...,0,0(,..., d ,
such that daa ,...,1 are pairwise relatively prime positive integers. By corollary (2.4.1), if we define )(3 Zgd − as
ΖΖ−Ζ−Ζ−Ζ−−Ζ=Ζ
−−
− )1)(1()1)(1(
)1()(
21
3
3 dAAA
dtA
dgL
where d21 aaaA ⋅⋅⋅= , dk21k aaaaA ⋅⋅⋅⋅⋅⋅= and ka means that the factor
ka is omitted, then the poles of the function )(3 Zgd − are at Z = 0, 1 and
the roots of unity.
We find the residues of the function )(3 Zgd − at these poles.
Since daa ,...,1 are pairwise relatively prime therefore )(3 Zgd − has simple
poles at daa ,...,1 -th roots of unity. Let λλ ≠=11a and since,
daaA ⋅⋅⋅= 1 , daaaA ⋅⋅⋅= 321 ,…, 121 −⋅⋅⋅= dd aaaA , therefore
ΖΖ−Ζ−⋅⋅⋅Ζ−Ζ−
−Ζ=Ζ−⋅⋅⋅⋅⋅⋅⋅⋅⋅
−⋅⋅⋅−
− )1)(1()1)(1(
)1()(
121312
1 3)(
3 ddd
d
aaaaaaaa
daat
dg .
Now at λ=Z ,
01 2 ≠− ⋅⋅⋅ daaλ and 01 ≠− λ . Therefore
A change of variables
== ωωΖ log
a
1exp
1
a1
1 is made, where
a suitable branch of logarithm such that λ=
)1log(
a
1exp
1
, thus

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٨
=−−
−
−−==ΖΖ
−−
−
1,)1)...(1(
)1(Re
)1)(1(
1)),((Re
2
1
3
1
3
ωωω
ω
λλλλ
λ
dBB
dtB
Ad
s
ags
where dk32kd32 a...a...aaB,a,...,a,aB == . since )0),((Re)1),((Re =Ζ==ΖΖ ΖΖ efesfs , then
=Ζ−Ζ−
−Ζ −−
1,)1)...(1(
)1(Re
2
3
ZsdBB
dtB
=Ζ−−
−= Ζ
−Ζ−Ζ
0,)1)...(1(
)1(Re
2
3
dBZB
dtB
ee
ees
Let α = tB, then
)0,)1)...(1(
)1((Re
2
3
=Ζ−−
−ΖΖ
−Ζ−Ζ
dBB
dtB
ee
ees = )0,
)1)...(1(
)1((Re
2
3
=Ζ−−
−ΖΖ
−Ζ−Ζ
dBB
d
ee
ees
α
.
By writing the Maclaurin series for exponential function one can get,
=Ζ
−−−−
−−−−
−++−+−
−
0,...
!2)(
11...!2)(
11
)1(...!3
)(
!2
)(1
Re22
22
332
ZBZB
ZBZB
ZZZe
sd
d
d
Z
L
ααα
after simple computations the above residue can be written as,
=
+++
++
−+−
−⋅⋅⋅−−
−
−++−
−
0,...
!3)ZB(
!2)ZB(
1...!3)ZB(
!2)ZB(
1
...!3
)Z(
!2
)Z(1
z)B()B(
e)(sRe
2
dd
2
22
3d2
1d3d
d2
Z3d
Ζ
ααα
L
Let
3
33
22
...!4!3!2
1−
+−+−=d
ZZZIααα
1
3322
222
2 ...!4!3!2
1−
++++= ZB
ZB
ZB
J
1
3332
233
3 ...!4!3!2
1−
++++= ZB
ZB
ZB
J

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٣٩
M 1
33
22
...!4!3!2
1−
++++= ZB
ZB
ZB
J dddd
then
=−−
− −−
0,)e1)...(e1(
)1e(esRe
d2 BB
3d
ΖΖΖ
ΖαΖ
=
−−−=
−
0),()()(
)(Re 22
2
3
ZJIJZBB
es d
d
Zd
LL
α
for the function )()()(
)(22
2
3
d
d
Zd
JIJZBB
eL
L −−− −α we have a pole of order two at
zero.
Let d
Z JJIJeZ L32)( =φ , and ))...((
)(
2
3
d
d
BB −−=
−αγ
After simple computations on γ , we get B
t d 3−
=γ . By the formula for
finding the residues given by (2.13), if we consider
2
)()(
Z
ZZf
γφ= , then !1
)0()0),((Re
γφ′==ΖΖfs ,where
d
Z
d
Z JJIJeJJJIeZZ ′++′+=′ LL 3232 ...)()( φφ . Let
d
Z JJJIeK L321′= , d
Z JJJIeK L322′= ,…, d
Z
d JJIJeK ′= L32 therefore
dKKKZZ ++++=′ ...)()( 21φφ at Z = 0, we compute )0(φ′ , after simple computations we get
!2
)3()...(
!2
11)0( 32
−−+++−=′ dBBB d
αφ
therefore,
−−+++−==−
!2
)3()...(
!2
11)0),((Re 32
3 dBBB
B
tZZfs d
d α .
Let
+++−= )...(!2
11
132 dBBB
BD
Therefore,

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٠
3
1
3 )1)(1()),((Re
1
−− −−
==ΖΖ d
Ad ta
Dgs
λλλ .
all the 1a -th roots of unity ≠ 1 are added up to get
∑∑≠=
−
≠=− −−
==ΖΖλλλλ λλ
λ11
3
1
31
11 )1)(1(
1)),((Re
aa
A
d
d a
Dtgs .
Let ξ be a primitive tha −1 roots of unity, therefore
∑≠=
−
−−λλ λλ11
3
11 )1)(1(
1
a
A
d
a
Dt∑
−
=
−
−−=
1
11
3 1
1 )1)(1(
1a
kkkA
d
a
Dt
ξξ
then
∑−
= −−
1
11
1
1 )1)(1(
11a
kkkAa ξξ )1(2
11
)1(2
111 1
11
1
1
11
k
kka
kkA
kAkA
a ξξξ
ξξξ
−++−⋅
−++−= ∑
−
=
−++⋅
−++= ∑
−
=k
ka
kkA
kA
a ξξ
ξξ
1
11
1
11
4
1 1
11
1
1
1
∑−
=
−+⋅
−++
−++
−++=
1
11
1
1
1
1
1
1
1
1
1
1
1
1
11
4
1 a
kk
k
kA
kA
kA
kA
k
k
a ξξ
ξξ
ξξ
ξξ
−+⋅
−++
−++
−++= ∑ ∑ ∑
−
=
−
=
−
=
1
1
1
1
1
11
1 1 1
1
1
1
1
1
1
1
1
1
1
1
11
4
1 a
k
a
k
a
kkA
kA
k
k
kA
kA
k
k
a ξξ
ξξ
ξξ
ξξ
−+⋅
−++
−++
−++−= ∑∑
−
=
−
=
1
1
1
11
1
1
1
1
11
1
1
1
1
1
1
1
1
1
1
4
1)1(
4
1 a
kkA
kA
k
ka
kkA
kA
k
k
aa
a ξξ
ξξ
ξξ
ξξ
Now, since 1
1
1 a=ξ , then by using the formula for finding the roots in
the complex plane, i
a
k
k er 1
2 π
= , k = 0,1,…, 11 −a . We obtain
∑−
=
−++
−+1
1
1
1
1
1
1
1
1a
kkA
kA
k
k
ξξ
ξξ =∑
−
=
−
++−
+1
1)
2(
)2
(
)2
(
)2
(1
1
1
1
1
1
1
1
1
1
1a
ki
a
Ak
ia
Ak
ia
k
ia
k
e
e
e
eπ
π
π
π
.
and

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤١
∑−
=
−+⋅
−+1
1
1
1
1
11
11a
kkA
kA
k
k
ξξ
ξξ
∑−
=
−
+⋅
−
+=1
1)
2(
)2
(
)2
(
)2
(1
1
1
1
1
1
1
1
1
1
1a
ki
a
Ak
ia
Ak
ia
k
ia
k
e
e
e
eπ
π
π
π
But
−+−==
iz
iz
e
ei
z
zz
2
2
1
1
)sin(
)cos()cot(
hence =
−
++−
+∑
−
=
1
1)
2(
)2
(
)2
(
)2
(1
1
1
1
1
1
1
1
1
1
1a
ki
a
Ak
ia
Ak
ia
k
ia
k
e
e
e
eπ
π
π
π
∑−
=
+−1
1 1
1
1
1
cotcot1a
k a
kA
a
k
i
ππ
and
∑−
=
−+⋅
−+1
1
1
1
1
11
11a
kkA
kA
k
k
ξξ
ξξ
∑−
=
π⋅π−=1
1 1
1
1
1
cotcota
k a
kA
a
k
∑−
=
⋅−=
1
1 1
1
1
1
cotcota
k a
kA
a
k ππ
therefore
−+⋅
−++
−++
−++− ∑∑
−
=
−
=
1
1
1
11
1
1
1
1
11
1
1
1
1
1
1
1
1
1
1
4
1)1(
4
1 a
kkA
kA
k
ka
kkA
kA
k
k
aa
a ξξ
ξξ
ξξ
ξξ
)1(4
11
1
−= aa ∑
−
=
++
1
1 1
1
11
1
cotcot4
a
k a
kA
a
k
a
i ππ∑
−
=
⋅−
1
1 1
1
11
1
cotcot4
1 a
k a
kA
a
k
a
ππ
The imaginary terms disappear, and then the above equation can be written as
4
1
14
1
a− ∑
−
=
⋅−
1
1 1
1
11
1
cotcot4
1 a
k a
kA
a
k
a
ππ4
1=14
1a
− ),(4
411
1
1 aASa
a−
where ),( 11 aAS is the Dedekind sum of 11 and aA . Hence
)),(4
1
4
1()),((Re 11
1
3
1
31
aASa
Dtgs d
da
−−==ΖΖ −
≠=−∑
λλ
λ .
Similar expressions are obtained for the residues at the other roots of unity.
Now we find the residue at )(3 Zgd − at Z = 1, we have

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٢
)0),((Re)1),((Re 33 =Ζ==ΖΖ Ζ−
Ζ− egesgs dd
then
==ΖΖ− )1),((Re 3dgs
=Ζ−−−−
−ΖΖΖΖ
−Ζ−Ζ
0,)1)(1)...(1)(1(
)1(Re
21
3
eeeee
ees
ZAAA
dtA
d
.
By writing the Maclaurin series for exponential function we get,
=Ζ
−−−−⋅
−−−−
−−−−
−++
α−
α+α−
−
0,
...!2
11...!2
)(11...
!2
)(11
)1(...!3
)(
!2
)(1
Re222
22
332
ZZ
ZAZA
ZAZA
ZZZ
sd
d
d
L
where tA=α , then the above residue becomes
=Ζ
+++
+++
++
−
α+
α−
⋅⋅⋅α
−
−
0,
...!3!2
1...!3
)(
!2
)(1...
!3
)(
!2
)(1
...!3
)(
!2
)(1
)()(
)(Re
222
11
32
4
1
3
ZZZAZAZAZA
ZZ
ZAAs
dd
d
d
d
L
the function for which we want to find the residue has a pole of order four at zero. Let
++⋅
++
+++
++−=
−
...!3!2
1...!3
)(
!2
)(1...
!3
)(
!2
)(1
...!3
)(
!2
)(1
)(222
11
32
ZZZAZAZAZA
ZZ
Zdd
d
L
αα
φ ,
d
d
AA ...1
3−
= αγ and 4
)()(
z
zzf
γφ=
By the formula for finding the residue given by (2.13), we get
!3
)0()0),(f(sRe
)3( γφΖΖ == .
Let 3
33
22
...!4!3!2
1−
+−+−=d
ZZZIααα ,
1
32 ...Z!4
1Z
!3
1Z
!2
11h
−
++++=

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٣
1
33
122
111 ...Z
!4
AZ
!3
AZ
!2
A1J
−
++++= ,1
33
222
222 ...Z
!4
AZ
!3
AZ
!2
A1J
−
++++= ,…,
and 1
33
d22
ddd ...z
!4
Az
!3
Az
!2
A1J
−
++++= .
Then hJJIJZ dL21)( =φ and
hJJIJhJJIJhJJJIhJJJIZ dddd′+′++′+′=′ LLLL 21212121 ...)(φ
let
hJJJIK dL211′= , hJJJIK dL212
′= ,…, hJJIJK dd′=+ L211 and
hJJIJK dd′=+ L212
hence
2121 ...)( ++ ++++=′dd KKKKZφ and 2121 ...)( ++ ′′+′′++′′+′′=′′′
dd KKKKZφ Now,
3
33
22
...!4
)(
!3
)(
!21
−
+−+−=d
ZtA
ZtA
ZtA
I
therefore
( )
++−⋅
+−+−−=′
−
...!3
)(2
!2...
!4
)(
!3
)(
!21)3(
24
33
22
ZtAtA
ZtA
ZtA
ZtA
dZId
Differentiating I ′ to get I ′′ and I ′′′ , then put Z = 0 in the obtained expression to get
1)0( =I
−−=′!2
)3()0(tA
dI
+−−−=′′!3
)(2)
!2)(4()3()0(
22 tAtA
ddI

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٤
−+
−
−+−−
+
−−−−=′′′
!4
)(!3
!3
)(2
2)4(
!3
)(2))(4(
!2)6)(5()3()0(
322
3
tAtAtAd
tAtAd
tAdddI
For
1
33
122
111 ...
!4!3!21
−
++++= ZA
ZA
ZA
J
( )
+++
++++−=′−
...!4
3
!3
2
!2...
!4!3!21 2
3
1
2
11
2
33
122
111 Z
AZ
AAZ
AZ
AZ
AZJ
Differentiate J ′ to get J ′′ and J ′′′ , then put Z = 0 in the obtained expressions to get
1)0(1 =J , !2
)0( 11
AJ −=′ ,
!3)0(
2
11
AJ =′′ and 0)0(1 =′′′J .
In a similar way, we get the other differentiation of
dJJJ ,...,, 32 and h, then
=
=
⋅⋅⋅
−
0),()()(
)(Re
41
3
ZZzAA
tAs
d
d
φ )0(!3)()(
)( )3(3
1
3
φ−−
⋅⋅⋅
d
d
d t
AA
A .
Let !3
)0(
)()(
)( )3(
1
3 φ⋅⋅⋅⋅
=−
d
d
AA
AC
So by corollary (2.4.1) we get for d≥4, 3−dc , which is the coefficient of
3−dt of
))),((Re)1),(((Re)!3(
1
3
33 λλ∑
−Ω∈−− =ΖΖ+=ΖΖ
−−
d
dd gsgsd
So
−
−−−
++−
−−=− CaASaAS
aa
dD
dc dd
d
d ),(...),(1
...1
4
1
4)!3(
111
1
3
Thus we have proved the following:

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٥
Theorem (2.5.1): Let P denote the polytope in )4( ≥ℜ dd with vertices
)a,...,0,0(),...,0,...,0,a(),0,...,0,0( d1 where daa ,...,1 are pairwise relatively prime positive integers. Then 3−dc is given by
−
−−−
++−
−−=− CaASaAS
aa
dD
dc dd
d
d ),(...),(1
...1
4
1
4)!3(
111
1
3
where S(a,b) is the Dedekind sum of a and b,
+++−= )...(!2
11
132 dBBB
BD ,
!3
)0(
)()(
)( )3(
1
3 φ⋅
⋅⋅⋅=
−
d
d
AA
AC ,
+++⋅
+++
+++
++−=
−
...!3
Z!2
Z1...
!3)ZA(
!2)ZA(
1...!3)ZA(
!2)ZA(
1
...!3)tBZ(
!2)tBZ(
1)Z(
22
dd
2
11
3d2
L
φ .
d21 a...aaA = , dk21k a...a...aaA = , ka means the factor ka is omitted,
dk32kd32 a...a...aaB and a...aaB == . In a similar way, we get 4−dc for the d–polytope P (d≥5), where P is
represented by a list of vertices ),...,0,0(),...,0,...,0,(),0,...,0( 1 daa , daa ,...,1 are pairwise relatively prime positive integers. By corollary (2.4.1), if we define )(4 Zgd − as
ΖΖ−Ζ−Ζ−Ζ−−Ζ=Ζ
−−
− )1)(1)...(1)(1(
)1()(
21
4
4dAAA
dtA
dg
where daaA ⋅⋅⋅= 1 , ddk aaaA ⋅⋅⋅⋅⋅⋅= ˆ
1 and ka means that the factor ka
is omitted. The poles of the function ( )Zg d 4− are at Z = 0, 1 and the roots of unity. Now we compute the residues at these poles.
Since daa ,...,1 are pairwise relatively prime therefore ( )Zgd 4−
has simple poles at daa ,...,1 -th roots of unity.
Let λλ ≠= 11a and since, daaA ⋅⋅⋅= 1 , daaaA ⋅⋅⋅= 321
Therefore

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٦
ΖΖ−⋅⋅⋅Ζ−Ζ−−Ζ=Ζ ⋅⋅⋅⋅⋅⋅
−⋅⋅⋅−
− )1()1)(1(
)1()(
322
1 4)(
4 dd
d
aaaaa
daat
dg .
Now at λ=z
01 1 ≠− Aλ and 01 ≠− λ . Therefore
=−−−
−−−
==−−
− λΖΖΖΖ
Ζλλλ
λΖΖ ,)1)...(1)(1(
)1(sRe
)1)(1(
1)),(g(sRe
d321 AAA
4dtA
A4d
We make a change of variables
== ωωΖ log
a
1exp
1
a1
1 , where a suitable
branch of logarithm such that λ=
)1log(
a1
exp1
, thus,
=
−−−
−−==
−−
− 1,)1)...(1(
)1(sRe
a)1)(1(
1)),(g(sRe
d21 BB
4dtB
1
A4d ωωω
ωλλλλ
λΖΖ
where dk32kd32 a...a...aaB,a...aaB == .
By the same steps followed before, we obtain with α =tB
)0,)1)...(1(
)1((Re
2
4
=Ζ−−
−ΖΖ
−−Ζ
dBB
dZ
ee
ees
α
=Ζ
+++
++
−
α+
α−
−⋅⋅⋅−α−=
−
−++−
−
0,
...!3
)(
!2
)(1...
!3
)(
!2
)(1
...!3
)(
!2
)(1
)()(
)(Re
2222
42
142
4
ZBZBZBZB
ZZ
ZBB
es
dd
d
dd
d
Zd
L
let
4
33
22
...!4!3!2
1−
+−+−=d
ZZZIααα
13322
222
2 ...)!4!3!2
1( −++++= ZB
ZB
ZB
J
M
133
22
...)!4!3!2
1( −++++= ZB
ZB
ZB
J dddd

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٧
then
=Ζ
−−−
ΖΖ
−Ζα−Ζ
0,)1()1(
)1(Re
2
4
dBB
d
ee
ees
L
=
−−α−=
−
0),()()(
)(Re 23
2
4
ZJIJZBB
es d
d
Zd
LL
So for the function in the above residue we have a pole of order three at zero.
Let d
Z JJIJeZ L32)( =φ and ))...((
)(
2
4
d
d
BB −−=
−αγ
after simple commutations on γ we get 2
4
B
t d −
−=γ
By the formula for finding the residues given by (2.13), if we consider
3
)()(
Z
ZZf
γφ= , then !2
)0()0),((Re
γφ ′′==ΖΖfs
Let )0(!2
12
φ ′′=B
D
Therefore,
4
1
4 )1)(1()),((Re
1
−− −−
−==ΖΖ d
Ad ta
Dgs
λλλ .
all the 1a -th roots of unity ≠ 1 are added up to get
∑∑≠=
−
≠=− −−
−==ΖΖλλλλ λλ
λ11
4
1
41
11 )1)(1(
1)),((Re
aa
A
d
d a
Dtgs .
With the same procedure that we used to get 3−d
C , we obtain
−−−== −
≠=−∑ )a,A(S
a41
41
Dt)),(g(sRe 11
1
4d
1
4d1a λλ
λΖΖ .
Similar expressions are obtained for the residues at the other roots of unity.
Now we find the residue of )(4 Zgd − at Z = 1 by using
)0),((Re)1),((Re 44 =Ζ==ΖΖ Ζ−− egesgs d
Z
d then
==ΖΖ− )1),((Re 4dgs
=Ζ−−−−
−ΖΖΖΖΖ
−Ζ−Ζ
0,)1)(1)...(1)(1(
)1(Re
21
4
eeeee
ees
dAAA
dtA
.
By the Maclaurin series of the exponential function with tA=α , the above residue becomes

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٨
=Ζ
+++⋅
+++
+++
−+−
⋅⋅⋅−
−
−
0,
...!3!2
1...!3
)(
!2
)(1...
!3
)(
!2
)(1
...!3
)(
!2
)(1
)()(
)(Re
22211
42
51
4
ZZZAZAZAZA
ZZ
ZAAs
dd
d
d
d
L
ααα
for the function in the above residue, we have a pole of order five at zero.
Let d
d
AA ...1
4−
−= αγ and 5
)()(
Z
ZZf
γφ=
where =)(Zφ
+++⋅
+++
+++
++−
−
...!3
Z
!2
Z1...
!3
)ZA(
!2
)ZA(1...
!3
)ZA(
!2
)ZA(1
...!3
)Z(
!2
)Z(1
22dd
2
11
4d2
L
αα
by the formula for finding the residues given by (2.14), we get
!4
)0()0),((Re
)4( γφ ⋅==ΖΖfs
Let 4d
33
22
...Z!4
Z!3
Z!2
1I−
+−+−= ααα , 1
32 ...Z!4
1Z
!3
1Z
!2
11h
−
++++=
1
33
122
111 ...Z
!4
AZ
!3
AZ
!2
A1J
−
++++= ,…,1
33d2
2dd
d ...Z!4
AZ
!3
AZ
!2
A1J
−
++++=
then hJJIJZ dL21)( =φ Now for
4d
33
22
...Z!4
)tA(Z
!3
)tA(Z
!2
tA1I
−
+−+−=
The derivative is
( )
++−⋅
+−+−−=′−
...!3
)(2
!2...
!4
)(
!3
)(
!21)4(
24
33
22
ZtAtA
ZtA
ZtA
ZtA
dZId
Differentiating I ′ to getI ′′ , I ′′′ and )4(I , then put Z = 0 in the obtained expression to get
1)0( =I

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٤٩
−−=′!2
)4()0(tA
dI
+
−−−=′′!3
)(2
!2)5()4()0(
2tAtAddI
−+
−−+
−−+
−−−−=′′′
!4
)tA(!3
!3
)tA(2
2
tA)5d(
!3
)tA(2)tA)(5d(
!2
tA)6d)(5d()4d()0(I
322
3
)]!4
)tA(!3)(
2
tA)(5d()
!3
)tA(2)(5d()
!3
)tA(2()
!2
tA)((6d)(5d(
)!4
)tA(!3)(
2
tA)(2)(5d()
!3
)tA(2)(2)(5d()
!3
)tA(2)(
2
tA2)(6d)(5d(
)!3
)tA(2)(
2
)tA(3)(6d)(5d()
!2
tA)(7d)(6d)(5d)[(4d()0(I
32
222
32
22
2
2
24)4(
−−−+−+−−−
+−−−+−+−−−
+−−+−−−−−=
For
1
33
122
111 ...Z
!4
AZ
!3
AZ
!2
A1J
−
++++=
( )
+++⋅
++++−=′−
...!4
3
!3
2
!2...
!4!3!21 2
3
1
2
11
2
33
122
111 Z
AZ
AAZ
AZ
AZ
AZJ
Differentiating J ′ to get J ′′ , J ′′′ and )4(1J , then put Z = 0 in the
obtained expression to get
1)0(1 =J , 2
11
AJ −=′ ,
!3)0(
2
11
AJ =′′ , 0)0(1 =′′′J and
30)0(
41)4(
1
AJ −=
In a similar way, we get the other differentiation of
dJJJ ,...,, 32 and h, then
=
=
⋅⋅⋅
−
0),()()(
)(Re
5
1
4
ZZZAA
tAs
d
d
φ )0(!4)()(
)( )4(4
1
4
φ−−
⋅⋅⋅− d
d
d t
AA
A
Let !4
)0(
)()(
)( )4(
1
4 φ⋅⋅⋅⋅
−=−
d
d
AA
AC
So by corollary (2.4.1) we get for d≥5, 4−dc , which is the coefficient of 4−dt of

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٠
))),((Re)1),(((Re)!4(
1
4
44 λλ∑
−Ω∈−− =ΖΖ+=ΖΖ
−−
d
dd gsgsd
So
−
−−−
++−
−−=− C)a,A(S...)a,A(S
a
1...
a
1
a
1
4
1
4
dD
)!4d(
1c dd11
d21
4d.
Thus we have proved the following: Theorem (2.5.2): Let P denote the polytope in )5( ≥ℜ dd with vertices
)a,...,0,0(),...,0,...,0,a(),0,...,0,0( d1 where daa ,...,1 are pairwise
relatively prime positive integers. Then 4−dc is given by
−
−−−
++−
−−=− C)a,A(S...)a,A(S
a
1...
a
1
a
1
4
1
4
dD
)!4d(
1c dd11
d21
4d
where S(a,b) denotes the Dedekind sum of a and b,
02
2
2
!2
))((
== Z
Z
B
ZedZ
d
Dφ
, !4
)0(
)()(
)( )4(
1
4 φ⋅⋅⋅⋅
−=−
d
d
AA
AC ,
...)!2
1(...)!2
)(1...)...(
!2
)(1(
...)!3
)(
!2
)(1(
)(1
42
++⋅++++
++−=
−
ZZAZA
tBZtBZ
Zd
d
φ .
daaA ...1= , dkk aaaA ...ˆ...1= , ka means the factor ka is omitted and
dk2kd32 a...a...aB and a...aaB == .
With the same procedure we get the coefficients 965 ,...,, −−− ddd ccc under certain conditions. From the above methods, we note that )(zφ with their definitions are needed to differentiate more than once, so we obtain a general form for this differentiation given in sec. (2.6). Example (2.5.1): Let P be a 4-polytope with vertices (0,0,0,0), (7,0,0,0), (0,2,0,0), (0,0,3,0) and (0,0,0,5). It is easy to check that this polytope satisfies the conditions of theorem (2.5.1).

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥١
In this case the Ehrhart polynomial of the polytope is given by
.),( 01
22
33
44 ctctctctctPL ++++=
by theorem (2.5.1) 1c can be computed as
]C)5,A(S
)3,A(S)2,A(S)7,A(S5
1
3
1
2
1
7
1
4
1
4
4(D
)!34(
1c
4
3211
−−
−−−
+++−−−=
where ( )( )432 BBB5.01B
1D ++−= ,
+++⋅
+++
+++
++−=
−
...!3
Z
!2
Z1...
!3
)ZA(
!2
)ZA(1...
!3
)ZA(
!2
)ZA(1
...!3
)tBZ(
!2
)tBZ(1
)Z(22
dd
2
11
3d2
L
φ
After simple computations one can get
42,70,105,30,210 4321 ===== AAAAA
30
1D , 6B,10B,15B,30B 432 ===== .
!3
)0(
900
1 )3(φ⋅=C where
( ) ( )( )
++++++
++++
+−=...
!21
1...31...51...2
151...151
...151)(
ZZZZZ
tZZφ
let
...151 +−= tZI , ( ) 1
1 ...Z151J −++= , 1
2 ...Z2
151J
−
++= , ( ) 1
3 ...Z51J −++= ,
1
4 ...)31( −++= ZJ and 1
...Z!2
11h
−
++=
then hJJJIJZ 4321)( =φ , we find )(Zφ ′ , )(Zφ ′′ and )()3( Zφ then put Z=0 in
)()3( Zφ to get the value of C which is equal to
C= )0(!3
1
900
1 )3(φ

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٢
Also we need to compute S(30,7), S(105,2), S(70,3) and S(42,5),
which are equal to 0.071428, 0, 0.055555 and 0 respectively. By substituting 1c in the above formula one can get:
) ( )]52482.296)5,42(S
)3,70(S)2,105(S)7,30(S5
1
3
1
2
1
7
1
4
1
4
4
60
29
)!34(
1c1
−−
−−−
+++−
−−−=
39864.296−= .
From, )),(...),(()!2(
1112 dddd aASaASC
dc −−−
−=−
, where
)...1
(12
1)...(
4
1
1
1,12,1
d
dddd a
A
a
A
AAAdC +++++++= −
one can get the value of 2c , which is equal to,
)]5,()3,()2,()7,([)!24(
1432142 ASASASASCc −−−−
−=
where
( )
++++++++=
4
4
3
3
2
2
1
14,33,22,14
1
12
14
4
1
a
A
a
A
a
A
a
A
AAAAC
15432,1 == aaA , 35413,2 == aaA , and 14214,3 == aaA , therefore
( ) 125000.1212698.037698.24!2
12 =−=c .
2.6 General formula for the differentiation of h,J,...,J,J,I d21
In this section, we get a general form for the differentiation of the terms hJJJI d and ,...,,, 21 that appears throughout the process of finding the coefficients of the Ehrhart polynomial, we begin by considering
[ ] ( ) ,...2,1 32 == jhJJJIeI d
jZjL
where [ ]jI means that only I in the expression hJJIJe d
ZL32 is
differentiated j times.

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٣
Let d
d
J
J
J
JE
′++
′+= ...1
2
21 , then
[ ] IEII ′+=′′1
2 ,
[ ] [ ] IEIIEII ′′+′′++=′′′1
21
3 )( ,
[ ] [ ] [ ] [ ] IEIIEIEIIEII ′+′′+′++′′′++= 1
2
1
22
1
3
1
4)4( )2()2( ,
[ ] [ ] [ ] [ ] [ ]
[ ] [ ],)3(
3)(33)3(23
11
2
1
211
31
321
)4(41
5)5(
IEIEIIE
IEEIIEIEIIEII
+′′′′+′′+′′+
′+′′′+′++++=
[ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ] [ ],)4(
)64(46123
)46(46)4(
241
)4(1
21
3
1
2
11
2
1
2
1
3
11
22
1
)4(4
1
24
1
33
1
42
1
)5(5
1
6)6(
IEIEIIE
IIEIEEIEEIEEIE
IIEIEIEIEIIEII
+′+′′+′′′+
′′′+′′+′′+′+′+′++′++++++=
[ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ],10
151551020
103030)5(
)105()1010()10(
51010)5(
211
2211
321
211
21
21
311
21
31
31
21
411
)5(1
2)4(1
3
1
)4(4
1
)5(5
1
25
1
34
1
43
1
52
1
)6(6
1
7)7(
IEE
IEEIEIEEIEEIEE
IEEIEEIEEIEIIE
IIEIIEIIE
IEIEIEIEIIEII
′′′+
′+′+′′′+′′+′′+
′+′+′+′+′′++
′′′+′′′++′′++′+++++++=
[ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ],)(1560156045
904561530
2060601560
9060)6()156(
)2015()1520()615(
15205)6(
231
2111
211
311
221
21
32
11
22
1
42
1
2)4(
11
2
1
2
1
3
11
21
31
31
21
411
21
41
31
31
4
1
2
1
5
11
)6(
1
2)5(
1
3)4(
1
)4(4
1
)5(5
1
)6(6
1
361
351
531
621
)7(71
8)8(
IEIEEEIEEIEEIEE
IEEIEIEIEEIEEIEE
IEEIEEIEEIEEIEE
IEEIEEIEIIEIIE
IIEIIEIIE
IEIEIEIEIIEII
′+′′′+′′′′+′′′+′+
′+′′+′++′′′+′′′+
′′+′′+′′+′+′+
′+′+′+′′++′′′+++′′′++′′++′+++++++=
In order to differentiate dJJJ ,,, 32 K we need to find a general
formula for these differentiations so we work on these elements and find a general formula. To illustrate this, consider for example,

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٤
1...)
!4!3!21(
2
2133
222
222 −
=++++= −Zwe
ZwZ
wZ
wZ
wJ
then ZwJJe Zw
2222 =− . By assuming the implicit differentiation for both
sides of the above equation, we get
222 )()( 2 wJdZ
dJe
dZ
d Zw =−
and the second derivative of the above equation is
0)()( 22
2
22
2
2 =− JdZ
dJe
dZ
d Zw
when we differentiate 22 Je Zw d-times we get a shape like a binomial
formula dba )( + = dddd bbadd
bdaa ++−++ −− ...!2
)1( 221 .
Therefore,
0)( )(
2222 =−+ mmZw JwJe
where )(
2mJ is the m-th derivative of 2J , since 2w is constant therefore mw2
means 2w raised to the power m. For example,
let ZweJh 2
2= , then
)( 222222222 JwJeJeweJh ZwZwZw +′=+′=′ ,
),2( 2
22222222
22222
22222 JwJwJeeJwJeweJweJh ZwzBzBZwZw +′+′′=′++′+′′=′′
).33( 2
3
22
2
22222 JwJwJwJeh Zw +′+′′+′′′=′′′
And so on. Therefore
]1[222 JJJIeJ d
Z =′=′ L ,
22
]2[
22 JEJJ ′+=′′ where d
d
J
J
I
IE
′++
′+= ...12 .
JEJEJEJJ ′′+′++=′′′ 22
2
2
]2[
22
]3[
22 2 .
22222
]2[
222
3
2
]2[
2
2
2
]3[
22
]4[
2
)4(
2 3333 JEEJEJEJEJEJEJJ ′′+′′′+′+′+++= .

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٥
and similarly for highest derivative. By arranging them together we obtain
d
Z JJIeJ L22′=′ ,
,22
]2[22 JEJJ ′+=′′
JEJJEJJ ′′+′′++=′′′ 22
]2[
22
]3[
22 )( ,
222
]2[
22
]2[
2
2
22
]3[
22
]4[
2
)4(
2 )2()2( JEJJEJEJJEJJ ′′′+′′+′++′′′++= ,
,3)3(
)33()3()3(]2[
222222
]2[
22
2
]3[
22
]2[
2
3
2
]3[
2
2
2
)4(
2
]4[
22
]5[
2
)5(
2
JEEJEJJE
JJEJEJEJJEJJ
′+′′′′+′′+′′+
′′′+′+++++=
( ) ,)(34 612
)4()64()46(
46)4(
]2[
2
2
2
]2[
222
]2[
2
2
22
]3[
2222
4
2
2]2[
22)3(
2]3[
22)4(
2]4[
22
]2[2
42
]3[2
32
]4[2
22
)5(2
]5[22
]6[2
)6(2
JEJEEJEEJEEJE
JJEJJEJJE
JEJEJEJJEJJ
′+′′+′+′+′+′′+′′′++′′++′
++++++=
,10)(15)(155
10201030
30)5()105(
)1010()510(
51010)5(
]2[
222
]3[
22
2
2
]3[
2
2
2
]2[
222
]2[22
22
]3[222
]2[2
322
]3[2
222
]4[2222
)5(22
]2[2
)4(22
]3[22
)4(2
]4[22
)5(2
]5[22
]2[2
52
]3[2
42
]4[2
32
]5[2
22
)6(2
]6[22
]7[2
)7(2
JEEJEEJEJEE
JEEJEEJEEJEE
JEEJEJJEJJE
JJEJJEJE
JEJEJEJJEJJ
′′′+′+′+′′′+
′′+′′+′+′+
′+′+′′++′′′+′′′++′′++′++
+++++=
,)(10601560
)(45)(90)(15)(456
1530206060
15609060
)6()136()2015(
)1520()615(6
152015)6(
]2[2
22
]2[2222
]2[222
]3[222
]2[
2
2
2
2
2
]3[
2
2
22
]2[
2
3
2
]4[
2
2
2
]2[
2
)4(
22
]2[
22
2
2
]3[
222
]2[
22
3
2
]3[
22
2
2
]4[
222
]2[22
42
]2[22
32
]4[2
222
]5[2222
)6(2
2
]2[
2
)5(
2
)3(
2
]3[
2
)4(
2
)4(
2
]4[
22
)5(2
]5[22
)6(2
]6[22
]2[2
62
]3[2
52
]4[2
42
]5[2
32
]6[2
22
)7(2
]7[22
]8[2
)8(2
JEJEEEJEEJEE
JEEJEEJEJEJEE
JEEJEEJEEJEEJEE
JEEJEEJEEJEEJE
JJEJJEJJE
JJEJJEJEJE
JEJEJEJJEJJ
′′+′′′+′′′′+′′′+′+′+′+′+
+′′′+′′′+′′+′′+′′+′+′′+′+′+′
+′′+++++′′′++′′++′++
++++++=

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٦
( ) ( )( ) ( ) ( )( )
( )
JEEEJEEE
JEEEJEEJEEJEJEE
JEEJEEJEEJEJEE
JEEJEEJEJEEJEE
JEEJEEJEEJEEJEE
JEEJEEJEEJEE JEE
JEEJEEJEEJEJJE
JJEJJEJJE
JJEJJEJEJE7
JEJEJEJEJJEJJ
.105210
42035)(10)(7021
105210)(105)(105)(105
)(315)(315)(105721
423510510535
14021014021105
2102101057
21735213535
2135721
21353521)7(
]2[222
]2[222
22
]3[
2222
]2[
222
]2[
2
2
22
]3[
2
2
2
]2[
2
)4(
22
]3[222
]4[222
]2[2
322
]3[2
32
]2[2
22
32
]3[
2
2
2
2
2
]4[
2
2
22
]5[
2
2
2
]2[
2
)5(
22
]2[
2
)4(
2
2
2
]3[
2
)4(
22
]2[
22
3
2
]3[
22
2
2
]4[
222
]2[
22
4
2
]3[22
32
]4[22
22
]5[222
]2[22
52
]3[22
42
]4[
22
3
2
]5[
2
2
22
]6[
2222
)7(
22
]2[
2
)6(
2
32
]3[2
)5(2
)4(2
]4[2
)4(2
)5(2
]5[22
)6(
2
]6[
22
)7(
2
]7[
22
]2[
2
7
2
]3[
2
6
2
]4[2
52
]5[2
42
]6[2
32
]7[2
22
)8(2
]8[22
]9[2
)9(2
′′′′+′′′+′′′+′′′′′+′′+′′+′
+′′′′+′′′+′+′+′+′+′+′++
++′′′+′′′+′′′+′′+′′+′′+′′+′+′
+′+′+′+′+′′+++++++′′′
++′′++′+++++++++=
Since our work is for finding the coefficients of the Ehrhart polynomial until 9−dc , so the derivatives that we are needed are until 9-th derivative.
By similar procedure we get the derivatives of dJJJ ,,, 43 K and h
that are used in the definition of φ(z) in the preceding sections. When we arrange the obtained results we get a triangle like a Polya triangle [40, p.20] where the contents of the triangle are the coefficients of
,...E,E 3
2
2
2 in the expression ,..., )5(
2
)4(
2 JJ
[ ]
[ ] [ ]
[ ] [ ] [ ]
[ ] [ ]
[ ]
[ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ]
[ ]
[ ] [ ] [ ]2
2
3
2
4
2
2
2
5
2
6
2
7
2
8
2
9
2
3
2
4
2
5
2
6
2
7
2
2
2
3
2
4
2
5
2
2
2
3
2
)10(2
8
2
)9(
2
62
72
)8(2
4
2
5
2
6
2
)7(
2
2
2
3
2
4
2
5
2
)6(
2
2
2
3
2
4
2
)5(
2
2
2
3
2
)4(
2
2
2
182856705628
1721353521
16152015
151010
146
13
1
JJJ
J
JJJJE
JJJJJ
JJJJ
JJ
J
EJ
JEJ
JJEJ
JJJEJ
JJEJ
JEJ
E
Also, the first terms of the coefficients of K,, 22 EE ′′′ in the
expression of ,..., )5(2
)4(2 JJ are

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٧
[ ]
[ ] [ ]
[ ] [ ] [ ]
[ ] [ ]
[ ]
[ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ]22
32
42
52
62
72
22
32
42
52
22
32
)7(2
)9(2
62
)6(2
)8(2
42
52
)5(2
)7(2
22
32
42
)4(2
)6(2
22
322
)5(2
222
)4(2
2
1721353521
16152015
151010
146
13
1
JJJJJJ
JJJJ
JJ
EJ
JEJ
JJEJ
JJJEJ
JJEJ
JEJ
E
′′′′′
′
The second terms of the coefficients of ,..., 22 EE ′′′ in the expression
of ,..., )5(2
)4(2 JJ are
222)4(
2)5(
2)6(
2)7(
2
222
)4(
2
)5(
2
222
2
)8(2
)6(
2
)4(2
2
)9(2
)7(
2
)8(
2
)5(2
)6(2
)7(2
2
)4(
2
)5(
2
)6(
2
222
)4(
2
)5(
2
222)4(
2
22
17213535217
161520156
1510105
1464
133
11
JJJJJJJ
JJJJJ
JJJ
J
E
J
J
J
J
EJ
JEJ
JJEJ
JJJEJ
JJEJ
EE
′′′′′′′′′′′′
′′′′′′′′′′′′
′′′′′′′′′′′′
′′′
The coefficients of ,...EE ,EE 2
2222
′′ in the expression of ,..., 22 JJ ′′′′′ are arranged as follows.
[ ]
[ ] [ ]
[ ] [ ] [ ]
[ ] [ ]
[ ]
[ ] [ ]
[ ] [ ] [ ] [ ]22
32
42
52
22
32
62
62
)9(2
42
522
52
)8(2
22
32
422
42
)7(2
22
322
32
)6(2
222
22
)5(2
22
)4(2
2
2
21105210210105
15609060
103030
612
3
0
00
JJJJ
JJ
JEEJ
JJEEJ
JJJEEJ
JJEEJ
JEEJ
EEJ
JJ
′′
′′
′′
′′′′′
The diagonal of the above results is the second column of the
preceding Polya triangle, and the first column for the above results is obtained as follows:

Chapter Two Computing the Volume and Integral points of V-Representation of a Polytope using Ehrhart polynomial
٥٨
By multiplying the diagonal by 4,5,6… we get the line under the diagonal, which are: (3)(4)=12, (6)(5)=30, (10)(6)=60, (15)(7)=105, The general formula of the differentiation is given by
( ) [ ] ( ) [ ] ( )( ) WJJmEJJ mmmm ++−+= −− 1
2
1
2222 2 where 1<m≤8 and W can be obtained from the given tables as follow when m=3 then
( ) [ ] [ ] ( )( )2
2
2
22
3
2
3
2 JJEJJ ++= when m=4 then
( ) [ ] [ ] ( )( ) WJJEJJ +++= 3
2
3
22
4
2
4
2 2 from the tables, W can be found as follows
[ ] [ ] ( )( ) 22
2
2
2
22
2
2
2
2 2 JEJJEJEW ′′′++′+= .

Chapter Three The Ehrhart Polynomial of H-representation
Of a Polytope Introduction As seen before the computation of the volume of a polytope is very important in many applications. For this importance many researches concerning the volume of the polytopes and in particular with the Birkhoff polytopes are found. In this chapter a method for computing the coefficients of the Ehrhart polynomial of the Birkhoff polytope is discussed. Make a change on the matrix, which represents the polytope and find a formula for the number of integral points. These changes of the matrix are matrix operations on the rows (columns) of the matrix. We try to lessen the effect of their changes on the number of integral points. We further discuss a method for finding the volume of a polytope using Laplace transform.
Chapter three consists of four sections. In section one, a method for finding the volume of H-representation of polytope using Laplace transforms. In section two some basic concepts and remarks about the Birkhoff polytopes and their volumes are given. In section three, the Ehrhart polynomial of Birkhoff polytope is presented and in section four, further properties about the number of integral points are obtained under certain conditions, also we give the relation between the number of integral points of the original polytopes and the changing polytopes. 3.1 Computing the volume of a polytope using Laplace transform, [33]
This section is devoted to the computation of the volume of a polytope with H-representation using Laplace transform.
The idea of the method is to consider the volume of
bAXXP d ≤ℜ∈=••
+ , dnA ×ℜ∈ and ny ℜ∈ , as a function g(b) where
ℜ→ℜn:g which provides a simple expression of its Laplace transform
CCG n →: , and the inverse Laplace transform to G, which, in the next section, can efficiently be done by repeated applications of Cauchy residue theorem for the evaluation of one–dimensional complex integrals.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٠
Let ny ℜ∈ and dnA ×ℜ∈ such that the convex polyhedron,
yAXX)y(P d ≤ℜ∈=••
+ (3.1)
is compact, that is, P(y) is a convex polytope. The symbol +ℜ stands for the semi closed interval ℜ⊂∞),0[ .
Now consider the function ℜ→ℜng : defined by
))(()()(
yPVoldxygyP
== ∫ (3.2)
and let CCG n →: be its n-dimensional Laplace transform, that is, [1] ∫
ℜ
><−=n
dyygeG y )()( ,λλ (3.3)
where >⋅⋅< , is the Euclidean product defined on nℜ . Theorem (3.1.1), [33]:
Let )( yAXXyP d ≤ℜ∈=••
+ be a polytope, and let g and G be
defined by
))(()()(
yPVoldxygyP
== ∫ , ∫ℜ
><−=n
dyygeG y )()( ,λλ
respectively. Assume that X=0 is the only solution of the system
00 ≤≥•• AXX . Then:
>
>=
∏ ∏= =
0)Re(
0)Re( with,
)(
1)(
1 1
λλλλ
λT
n
i
d
jj
T
iAA
G (3.4)
Moreover
∫∫∞+
∞−
><∞+
∞−=
ic
ic
y,ic
icn
n
n
1
1
d)(Ge...)i2(
1)y(g
λλ
πλ (3.5)
where the real constants nccc ,...,, 21 are chosen such that c>0 satisfies
0cA T > . Proof:
Apply the definition of G given by (3.3) to obtain
∫ ∫ℜ ≤≥
><−
=
n
dydxe)(GyAx,0x
y,λλ

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦١
∫ ∫+ℜ ≥
><−
=
d
dxdyeAxy
y,λ
0)Re( with ,dxe1
d
T x,An
1ii
>= ∫∏ +ℜ
><−
=
λλ
λ
then after simple computations, one can get
>
>=
∏ ∏= =
0)Re(
0)ARe( with ,
)A(
1)(G
Tn
1i
d
1jj
T
i
λλλλ
λ
and (3.5) is obtained by a direct application of the inverse Laplace transform, [1]. It remains to show that, the domain
0)Re(,0)Re( >> λλ TA is non empty. This flows from the fact that a special version of Farka’s lemma due to Carver, [35, p.30], which states
that 00 >>•• uAu T has a solution nu ℜ∈ if and only if (x, y) = 0 is the
only solution of the system 0,00 ≥≥=+•• yxyAx . In other words,
x = 0 is the only solution of 00 ≤≥•• Axx , which is indeed the condition
given by this theorem.
Suppose that we want to compute the volume of the convex
polytope bAXXP d ≤ℜ∈=••
+ with b>0, that is, we must evaluate g(y) at
the point by = . Without a loss of generality, we may assume that 1=iy for every i=1,…,n. The problem is then computing h(1) of the function ℜ→ℜ+:h given by,
∫ ∫∞+
∞−
∞+
∞−
><==ic
ic
ic
ic
ez
nn
n
n
n dGei
zegzh1
1
, )(...)2(
1)()( λλ
πλ (3.6)
where ...),1,1(=ie be the vector in iℜ for 1≥i , such that its element is
one, and the real vector nc ℜ∈<0 , satisfies 0cA T > .
Computing the complex integral (3.5) can be done in two ways, directly as given in sec. (3.1.1) or indirectly as given in sec. (3.1.2).

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٢
3.1.1 The direct method, [33]: For better understanding the direct method, consider the case of
a polytope P with n=2. Let dA ×ℜ∈ 2 be such that X=0 is the only solution of
0AX0X ≤≥•• . Moreover, suppose that ][ baAT = with dba ℜ∈, and
assume that: i) 0≠jjba and jj ba ≠ for all j =1,2,…,d.
ii) kkjj baba ≠ for all j, k =1,2,…,d.
then:
>
>++=
∏=
0)Re(0)Re(
with ,)(
1)(
21
12121
λλλλλλλ
λba
baG d
jjj
Next, fix 1c and 02 >c such that 021 >+ cbca jj for every j =1,2,…,d, and
compute the integral (3.6) as follows. First evaluate the integral,
1
1211
1
1
1
1
)(2
1 λλλλπ
λ
dba
e
iI
ic
icd
jjj
z
∫∏
∞+
∞−
=
+= (3.7)
by using Cauchy residue technique. That is:
a) Close the path of integration by adding a semicircle Γ of radius R large enough.
b) Evaluate the closed integral using Cauchy's residue theorem. c) Show that the integral along Γ converges to zero when ∞→R .
Now, since we are integrating with respect to 1λ and we must
evaluate h(z) at z=1, the semicircle Γ must be added on the left side of the integration path 11)Re( c=λ because 1ze λ converges to zero when
( ) −∞→1Re λ . Therefore, we must consider only poles of ),( 1 ⋅λG whose real parts is strictly less than 1c (with 2λ being fixed). Recall that
122 /)/Re( cabcab jjjj <−=−λ for each j=1,2,…,d, and ),( 1 ⋅λG has only
poles of the first order (with2λ being fixed). Then, the evaluation of (3.7) follows, and
∑ ∏∏ =≠
λ−
=
+−λ−+
λ=
d
j
jkkjjk
dj
zab
d
jj
d babab
e
bI
jj
1 2
)/(
12
1 )/(
1 2

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٣
Therefore,
( )2
ic
ic 2
21
z
dIe
i2
1)z(h
2
2
2
λλ
λπ
λ
∫∞+
∞−=
∑ ∫ ∏∫∏ =
∞+
∞−
≠
+
−∞+
∞−
=
+ −−=
d
1j2
ic
ic
jkjkjkjj
1d2
z)a/b1(d
j
2
ic
ic d
1jj
1d2
z
d)baab(ba
ea
i2
1d
b
e
i2
1 2
2
2jj2
2
2
λλπ
λλπ
λλ
these integrals must be evaluated according to whether yab jj )/1( − is
positive or negative. Thus recalling that Z > 0, each integral is equal to: i) its residue at the pole 22 0 c<=λ when jj ab /1− is positive, and
ii) zero if jj ab /1− is negative because there is no pole on the right
side of 22)Re( c=λ that is
−−
−= ∑ ∏∏ <≠
=
1/
1
)(
)(1
!)(
jj ab
jkjkjkjj
d
jj
d
jj
d
baabba
ba
bd
zzh (3.8)
Observe that the above formula is not symmetrical in the
parameters a, b. This is because we have chosen to integrate first with respect to 1λ ; and the set 1/: <jj abj is different from the set
1/: >jj baj , which would have been considered if we have to integrate
first with respect to 2λ .
In the latter case, we would have obtained.
−−
−= ∑ ∏∏ <≠
=
1/
1
)(
)(1
!)(
jj ba
jkjkjkjj
d
jj
d
jj
d
abbaba
ab
ad
zzh
which is (3.8) by interchanging a and b. Example(3.1.1),[33]: Let ( )1,1,1e3 = be a vector in 3ℜ and let 2
3)ze(P ℜ⊂ be the polytope, which is defined by,

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٤
zxx2;zx2x2;zxxX)ze(P 212121
2
3 ≤−≤+−≤+ℜ∈=••
+ . To find
the volume of this polytope, write )ze(P 3 as
zAXX)ze(P 2
3 ≤ℜ∈=••
+ , where
−−=
12
2 2
1 1
A ,
choose 1 and 2,3 321 === ccc , so that 321 22 ccc −> and 231 2ccc −>
that satisfies the conditions c>0 and 0cA T > .
∫ ∫ ∫∞+
∞−
∞+
∞−
∞+
∞−
++=ic
ic
ic
ic
ic
ic
z)(
3
1
1
2
2
3
3
321 d)(Ge)i2(
1)z(h λλ
πλλλ ,
with )2)(22(
1)(
321321321 λλλλλλλλλλ
−++−=G ,
Integrate first with respect to 1λ ; that is, evaluate the residue of ( )λG at the poles 3211 22,0 λλλλ −== and 231 2λλλ −= since 0<z, 10 c< ,
132 )22Re( c<− λλ and 123 )2Re( c<− λλ . We obtain,
3
24322
2
2
3
3
)( ...)2(
1)( λλ
πddIII
izh
ic
ic
ic
ic∫ ∫∞+
∞−
∞+
∞−++= .
where,
)2)((2 232332
)(
2
32
λλλλλλ
λλ
−−=
+− zeI
)3/4)((6 232332
)3(
3
32
λλλλλλ
λλ
−−=
− zeI
)3/4)(2(3 232332
)2(
4
32
λλλλλλ
λλ
−−=
− zeI
Next, integrate 2I with respect to 3λ , we must consider the poles of 2I on the left side of 1)Re( 3 =λ , that is the pole 03 =λ , since 2)Re( 2 =λ . Thus,
we get 324
2
λ
λze−, and the next integration with respect to 2λ yields
8
2z−.
When integrate 3I with respect to 3λ , we have to consider the poles
23 λλ = and 3
4 23
λλ = , on the right side of 1)Re( 3 =λ ; and we get

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٥
+−−8
3
2
1 3/52
32
22 λλ
λ
zz ee
Recall that the path of integration has a negative orientation, so the
negative values of residues have to be considered. The next integration
with respect to 2λ yields
−48
2512z .
Finally, when integrating ),( 324 λλI with respect to 3λ , we must consider
only the pole 03 =λ , we get 328
2
λ
λze−; the next integration with respect to 2λ
yields zero. Hence, adding up the above three partial results, yields,
48
17
48
251
8
1)(
22 z
zzh =
−+−= .
3.1.2 The indirect method, [33]: The indirect method permits avoid evaluating integrals of exponential function in (3.6) which will be illustrated in this section. We want to compute (3.6) where 0≠b and c>0 are real vectors in nℜ with 0cA T > . From (3.1) it is deduced that g (b)=0 whenever 0≤b , so that the last entry 0>nb ; and the following simple change of variables are done. Let >=< bs ,λ and >=< bcd ,1 so that,
n
n
jjj
n b
bs
−=
∑−
=
1
1
λλ and
[ ] 1
c
1
1
1
1
1
1
1
... ˆ...)2(
1)( −
∞+
∞−
∞+
∞−
∞+
∞−∫ ∫ ∫−
−
= n
ic
i
ic
ic
id
id
zs
ndddsGe
izh
n
n
λλπ
where
−= ∑
−
=−− j
n
j n
j
n
n
n
n b
b
b
sG
bsG λλλλλ
1
11111 ,,...,
1),,...,(ˆ
h(z) can be rewrite as follows:
∫∞+
∞−=
id
id
zs dssHei
zh1
1
)()2(
1)(
π, with
111
1
1
1
1
ˆ)2(
1)( −
∞+
∞−
∞+
∞−− ∫ ∫−
−
= n
ic
ic
ic
ic nd d G
isH
n
n
λλπ
LL

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٦
where H(s) is the Laplace transform of h(z)=g(zb), and is called the associated transform of )(λG .
Let nA ×ℜ∈ 2 such that X=0 is the only solution of 0AX0X ≤≥•• .
Write ][ baAT = with dba ℜ∈, , assume that 0≠jjba for all j=1,…,d and
kjbaba kkjj ≠≠ allfor
Then,
>
>+=
∏=
,0)Re(
0)Re(h wit,
)(
1)(
12121
λλλλλλ
λtAba
G d
jjj
fix 12 λλ −= s and choose real constants 01 >c and 02 >c such that
021 >+ cbca jj for every j=1,2,…,d. Notice that 21)Re( ccs += . H(s) is
obtained by integrating ),( 11 λλ −sG along the line 11)Re( c=λ , which yields,
∫∏ +−−
= ∞+∞−
=
ic
ic d
jj
dsbbasi
sHjj
1
1 1
11
11 ))(()(
1
2
1)( λ
λλλπ
Next, determine which poles of ),( 11 λλ −sG are on the left(right)
side of the integration path )Re( 11 c=λ in order to apply the Cauchy
residue theorem. Let jjjj bajJbajJ ==>= ••
••+ , 0 and
jj bajJ <= ••− . Then the poles on the left side of )Re( 11 c=λ are
01 =λ and )/(1 jjj basb −−=λ for all +∈ Jj since 1)/()Re( cbasb jjj <−− .
Besides, the poles on the right side of )Re( 11 c=λ are s=1λ and )/(1 jjj basb −−=λ for all −∈ Jj .
Finally, notice that ),( 11 λλ −sG has only poles of the first order. Hence, computing the residues of poles on the left side of )Re( 11 c=λ yields,
+−−−
+= ∑ ∏∏∏ +∈≠∉
−
∉∈Jj
jkjkkjkjjj
jd
jj
Jjj
Jjj bsaasbbas
ba
sbssbsH
,
2
0
0
00
)(
)(11)(

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٧
After moving terms around, we obtain
−−
−= ∑ ∏∏ >≠
=
+jj ba
jkkjkjjj
d
jj
d
jj
d abbaba
ba
bssH
)(
)(11)(
1
1
Notice that the previous equation holds even for the case 00 ≠J .
Finally, after integration with respect to s, we get
−−
−= ∑ ∏∏ >≠
=
jj ba
jkkjkjjj
d
jj
d
jj
d
abbaba
ba
bd
zzh
)(
)(1
!)(
1
Now, computing the negative value of residues of poles on the
right side of )Re( 11 c=λ yields,
−−
−= ∑ ∏∏ >≠
=
+jj ab
jkkjkjjj
d
jj
d
jj
d baabba
ab
assH
)(
)(11)(
1
1
and after integration with respect to s, one also get the following
−−
−= ∑ ∏∏ <≠
=
1/
1
)(
)(1
!)(
jj ba
jkjkjkjj
d
jj
d
jj
d
abbaba
ab
ad
zzh in particular case 00 =J
Example(3.1.2),[33]: Consider example(3.1.1). By setting )1,1,1(3 =e , let 2
3)( ℜ⊂Ρ ze be the polytope which is defined by
zxx2 ;zx2x2 ;zxxX)ze(P 212121
2
3 ≤−≤+−≤+ℜ∈= +
We can choose 2,1 321 === ccc and 123 λλλ −−= s , so that, 4)Re( 1 == ds , and
2
1
1
1
1 12
),()2(
1)( λλλ
πddsM
isH
i
i
i
i∫ ∫∞+
∞−
∞+
∞−=
with )32)(42)((
1),(
21212121 ssssM
−+−−−−=
λλλλλλλλλ

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٨
We first integrate with respect to 1λ . Only the real parts of poles
01 =λ and 2/)3( 21 λλ −= s are less than 1. Therefore, the residue of the 0-pole yields:
2
1
1 2222 )3)(42)((
1
2
1 λλλλλπ
dsssi
i
i∫∞+
∞− −−− (3.9)
whereas the residue of ( )2/)3( 2λ−s -pole yields
2
1
1 2222 )53)()(3(
4
2
1 λλλλλπ
dsssi
i
i∫∞+
∞− −+− (3.10)
Applying again the Cauchy residue theorem to (3.9) at the
pole 02 =λ yields )2/(1 3s− . Similarly, applying the Cauchy residue theorem to (3.10) at the poles
02 =λ and s2 −=λ yields 324
29
s, finally we obtain ( )
324
17
ssH = and so
248
17)(
zzh = , which is the area of the polytope.
3.2 Some basic concepts about Birkhoff polytopes The set of doubly stochastic nn × matrices form a convex set called Birkhoff polytope. In this section, we describe the Birkhoff polytope with some methods for finding its volume.
We start this section by the following definition.
Definition (3.2.1), [7]: The n-th Birkhoff polytope nB is the set of all doubly stochastic
nn × matrices, that is, those matrices with non negative real coefficients in which every row and column sums to one. In other words, the n-th Birkhoff polytope nB is defined as

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٦٩
≤≤=
≤≤=ℜ∈
=∑
∑+
kjk
jjk
n
nn2n1n
n22221
n11211
n nj1 allfor 1x
nk1 allfor 1x:
x...xx
...
...
...
xxx
x...xx
B2
nB is a convex polytope. Remarks (3.2.1):
There are different ways for computing the volume of Birkhoff polytopes. One of the recent attempts to compute )( nBvol relies on the theory of counting functions for the integer points in the polytopes. Recall that Ehrhart has proved that for a polytope nP ℜ⊂ with integral vertices, the number, )(),( ntPcardtPL Ζ= I , is a polynomial in the positive integer variable t, this counting function, has three properties, which are [7],
• The degree of ),( tPL is the dimension of P.
• The leading term of ),( tPL is the relative volume of P.
• Since ),( tPL is a polynomial, therefore it can be evaluated at nonpositive integers. These evaluations yield 1)0,( =PL
),()1(),( )dim( tPLtPL P o−=− (3.11) where oP is the interior of P.
We will denote the Ehrhart polynomial of the Birkhoff polytope
nB as ),()( tBLtH nn = , where nH is a polynomial in t of degree 2)1( −n , to do this count, note that the last row and column are fixed by the conditions that the row and column sums should equal one. The remaining 2)1( −n entries can be chosen freely; therefore the dimension
of nB is 2)1( −n , which is the degree of the Ehrhart polynomial of the Birkhoff polytope.
The first two of these polynomials are easily computed, [7] which
are, 1)( ,1)( 21 +== ttHtH

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٠
We will compute these polynomials in the next section, the first nontrivial polynomial was computed see [7], is
2
3 2
2t
2
3t3)t(H
++
+−=
The properties of nH are found in [7]. From (3.11), it is deduced that
)()1()( 1 tHtnH n
n
n
−−=−− and
0)1(...)2()1( =+−==−=− nHHH nnn
This allows the following strategy for computing nH , and
therefore, the volume of nB : compute the first
−2
1n values of nH , use
the above symmetry and trivial values of nH , and calculate the polynomial nH by interpolation, [7], [17].
3.3 The Ehrhart polynomial of a Birkoff polytope In this section we give some theorems that can be used to count the Ehrhart polynomial of the Birkhoff polytope. One can view the Birkhoff polytope nB as given in the form of
bAX:XP d =ℜ∈= + (3.12)
where
=
1010010
0....0.00.0
...
.0..
111
1...1
00.
0.0000
0.0000
01...100
0001...1
A
We illustrate how to represent the Birkhoff polytope in the form (3.12). For example if n = 2 then from the definition of the Birkhoff polytope,

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧١
=
2221
1211
2 aa
aaB
where
1
1
1
1
2212
2111
2221
1211
=+=+=+=+
aa
aa
aa
aa
this means that
=
1
1
1
1
1010
0101
1100
0011
22
21
12
11
a
a
a
a
Let
=
=
=
1
1
1
1
,
1010
0101
1100
0011
22
21
12
11
band
a
a
a
a
XA
Then bAX:XP d =ℜ∈= + which is the H-representation of the polytope. Now, some theorems that concern this type of polytopes are given.
Theorem (3.3.1), [7]: Consider a convex rational polytope P given by (3.12) for some ( dm× )-matrix A and m-dimensional vector b. Denote the columns of A by dcc ,...,1 . Then
∫∫=
−−−−−−
= −−−=
mm
d
m
Z
ccc
tb
m
tbtb
Z
mdZ
ZZZ
ZZZ
itPL
ξξπ )1()1)(1()2(
1),(
21
21
11
11
2
1
1
L
LL
where 1,...,0 1 << mξξ are distinct real numbers and t is a positive integer. Proof: Consider the function
)1()1)(1(
)(21
21 11
2
1
1
d
m
ccc
tb
m
tbtb
ZZZ
ZZZZf
−−−=
−−−−−−
L
L

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٢
Here, (the standard multivariate notation nw
n
wW vvV ...`1
1= ) is used. f(Z) will be integrated with respect to each variable over a circle with a small radius:
∫∫== mmZ
mm
Z
dZdZZZfξξ
11 ),...,(11
LL (3.13)
here 1,...,0 1 << mξξ are chosen such that, all of the )1(
1kcZ−
can be
expanded into power series about 0. Since the integral over one variable will give the respective residue at 0, integration can be done with respect to one variable at a time. When f is expanded into its Laurent series about 0, each term has the form 11
1 ,...,11 −−−− mm tbr
m
tbr ZZ , where mrr ,...,1 are nonnegative integers. Thus, in the integral (3.13) will give a contribution precisely. Remark(3.3.1): A special case of theorem (3.3.1) can be obtained by putting b = (1,1,…,1) nZ 2∈ , therefore the Ehrhart polynomial of the n-th Birkhoff polytope is given by
∫ ∫ −−−=
++
−−
dZZZZZZZ
ZZ
itH
nnnn
t
n
nn )1()1)(1(
)(
)2(
1)(
22211
121
2L
LL
π
Here, each integral is over a circle with radius < 1 centered at the
origin; all appearing radii should be different.
The following theorem gives a general formula of the Ehrhart polynomial of the Birkhoff polytope with b = (1,1,…,1).
Theorem (3.3.2), [7]: For any distinct 1,...,0 1 << nξξ ,
1 1
11
111 )(
)()2(
1)( dZdZ
ZZ
ZZZ
itH n
n
Z Z
n
k
kjjk
nt
kt
nnnnn
LLL∫ ∫ ∑∏= ==
≠
−+−−
−=
ξ ξπ.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٣
Proof: From remark (3.3.1), the last n variables of )(tH n can separate and
obtain
( ) 1111
11
21 )1()1)(1(2
1
)2(
1)( dZdZdZdZ
ZZZZZZ
Z
iZZZ
itH nn
n
n
tt
nnn LL
LL −
−−−−
∫ ∫ ∫
−−−ππ=
The radius of integration circle of the inner most integral may be chosen to be smaller than the radii of the other integration paths. Then the innermost integral is computed which is equal to the residue at zero of
)1()1(
1
11 ZZZZZ n
t −−+L
and, by residue theorem, equal to the negative of the sum of the residues at 11
1 ,, −−nZZ K . ( Note that here we use the fact that t>0 ).
The residues at these poles are computed: the one, say, at 1
1
Zcan be
calculated as
)1()1(
1
1
1
lim
)1()1(
11lim
2
1
1
1
1
11
11
1
1
ZZZZZZZ
ZZ
ZZZZZZZ
n
t
ZZ
n
t
ZZ
−−⋅
−
−=
−−⋅
−
+→
+→
L
L
)()()1()1(
1
121
1
1
11
2
1
1
1 n
nt
n
t
ZZZZ
Z
Z
Z
Z
ZZ
Z −−−=
−−⋅−=
−++
LL
Similarly we calculate the residues at the other poles, which yield the Ehrhart polynomial of the Birkhoff polytope.
In the next example we will illustrate the computation of 1H . Example (3.3.1):
From theorem (3.3.2) we get,
.122
1
2
1
2
1)( 1
1
111
1
11
1111
=⋅=
== ∫∫=
−
=
−−
ii
dZZi
dZZZi
tHzz
tt
ππ
ππ ξξ

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٤
The next example will explain the computation of 3H and hence
the volume of 3B . Example (3.3.2), [7]:
By using theorem (3.3.2) we get
dZZZZZ
Z
ZZZZ
Z
ZZZZ
ZZZZ
itH
t
ttt
3
2313
23
3212
22
3121
21
1
32133
))((
))(())(()(
)2(
1)(
−−
+
−−+
−−=
+
++−−
∫π
We have to order the radii of the integration paths, for each variable; we choose 10 123 <<<< ξξξ we use this fact after multiplying out the cubic:
integrating, for example, the term 3
13
3
23
523
12
11
)()( ZZZZ
ZZZ ttt
−−
+−−−−
with respect to 3Z
gives 0, as this function is analytic at the 3Z - origin and 321 , ξ>ZZ .
After using this observation for all the terms stemming from the cubic, the only integrals surviving are
∫ −−
−−−−+
dZZZZZ
ZZZ
i
ttt
331
321
13
12
521
3 )()()2(
1
π
and
∫ −−−− −−+
dZZZZZZZ
ZZZ
i
tt
)()()()2(
3
32
2
31
3
21
132
31
3π
The first integral factors and yields, again by residue calculus
∫ −−
−−−−+
dZZZZZ
ZZZ
i
ttt
3
31
3
21
13
12
521
3 )()()2(
1
π
.2
2
)2)(1(2
1
2
1
)()2(
1
2
1
23
152
1
1
2
31
152
13
+=
−−−−−π
=
−π=
∫
∫
−−+
−−+
t
dZZttZi
dZdZZZ
ZZ
i
tt
tt

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٥
for the second integral, it is most efficient to integrate with respect to 2Z first.
∫ −−−− −−+
dZZZZZZZ
ZZZ
i
tt
)()()()2(
3
32
2
31
3
21
132
31
3π ∫ −−=
−+
135
31
33
12 )()2(
3dZdZ
ZZ
ZZ
i
tt
π
∫
+−=−−−−−−−−= −−+
4
33)3)(2)(1)((
!4
1.
2
31
41
31
tdZZttttZ
itt
π
Adding up the last two lines finally gives
14
9
8
15
4
3
8
1
4
33
2
2)( 234
2
3 ++++=
+−
+= tttt
tttH
In general, the relative volume of the fundamental domain of the sub lattice of
2nΖ in the affine space spanned by nB is 1−nn , [7]. Therefore, to obtain the volume of 3B , the leading term of 3H has to be multiplied by the relative volume of the fundamental domain of the sub lattice of 9Ζ in the affine space spanned by 3B which is equal to 9;
hence 8
9)B(vol 3 =
Now for n = 4, the number of integrals that has to evaluate to
compute 4H is only slightly higher. By theorem (3.3.2)
.)(
.)()2(
1)(
4
4
1
31
432144
11 22 33 44
dZZZ
ZZZZZ
itH
k
kjjk
t
kt
Z Z Z Z
−= ∑∏∫ ∫ ∫ ∫
=≠
+−−
= = = =ξ ξ ξ ξπ
Again we have a choice of ordering the radii; 10 1234 <<<<< ξξξξ are used. After multiplying out the quadric, five integrals have to be calculated; their evaluation (again straight forward by means of the residue theorem) is as follows:
∫ −−−
−−−−−−+
dZZZZZZZ
ZZZZ
i
tttt
4
41
4
31
4
21
14
13
12
1131
4 )()()()2(
1
π
3
1
3
4
1
1113
14 3
3
)(.
)2(
1
+=
−= ∫∫
−−+ t
dZdZZZ
ZZ
i
tt
π,

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٦
∫ −−−−−− −−−−+
dZZZZZZZZZZZ
ZZZZ
i
ttt
))(()()()()2(
4
4232
3
41
3
31
4
21
14
13
22
821
4π
21
2
2
3
1
1
4
21
22
821
4 )()()()2(
4dZdZdZ
ZZZZ
Z
ZZ
ZZ
i
tt
−−⋅
−−= ∫∫
−−+
π
dZZZ
Z
ZZ
Z
ZZ
Zt
ZZ
Zt
ZZ
ZZ
i
tt
tttt
−−
−
+
−++
−
+⋅
−=
−−−−
−−−−+−+
∫
3
21
12
3
31
11
2
21
21
21
31
7
21
12
821
2
)()(2
)()1(2
)(2
22
)()2(
4
π
+−
++
+++
+
+=
9
824
9
78
8
6)1(8
7
5
2
28
tttt
tt,
∫ −−−−−
−−−−+
dZZZZZZZZZZZ
ZZZZ
i
ttt
))(()()()()2(
4
4332
3
41
4
31
3
21
14
23
12
821
4π
∫ −−−=
−−−−+
dZZZZZZZ
ZZZ
i
ttt
)()()()2(
4
42
7
41
3
21
14
12
821
3π
dZZZ
Z
ZZ
Zt
ZZ
Zt
ZZ
ZZ
i
ttttt
−+
−++
−
+⋅
−=
−−−−−−−−+
∫ 2
41
11
2
41
21
41
31
7
41
14
821
2 )()()1(
)(2
2
)()2(
4
π
++
++
+++
+
+=
9
7
9
7
8
6)1(
7
5
2
24
tttt
tt,
∫ −−−−−
−−−−++
dZZZZZZZZZZZ
ZZZZ
i
tttt
2
42
2
32
2
41
2
31
4
21
14
13
52
51
4 )()()()()()2(
6
π
21
2
2
21
1
4
21
52
51
4 ))(()()2(
6dZdZdZ
ZZZZ
Z
ZZ
ZZ
i
ttt
−−⋅
−= ∫∫
−−++
π

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٧
dZZZ
Z
ZZ
Zt
ZZ
Zt
ZZ
ZZ
i
ttttt
))(
4)(
)1(4)(
)1(()()2(
66
21
22
2
5
21
32
2
4
21
42
22
4
21
5
2
5
1
2 ∫ −+
−+−
−+⋅
−=
−−−−−−++
π
++
++−
++=
9
524
8
5)1(24
7
5)1(6 2
ttt
tt ,
∫ −−−−−−−=
−−+
dZZZZZZZZZZZZZ
ZZZZ
i
tt
))(()()()()()2(
12
4342
2
32
2
41
3
31
3
21
14
23
22
51
4π
∫ −−−−=
−−+
dZZZZZZZ
ZZZ
i
tt
3
42
5
41
3
21
14
22
51
3 )()()()2(
12
π
dZZZ
Z
ZZ
Z
ZZZZ
ZZ
i
tt
))(
6)(
6)(
1(
)()2(
125
41
2
4
4
21
4
3
41
5
41
1
4
5
1
2 ∫ −+
−+
−⋅
−−=
+−+
π
+−
+−
+−=
9
572
8
572
7
512
ttt
After simple computations one can get
118
65
63
379
5670
3511710
43
540
1109
3
2
135
19
630
11
11340
11)(
23
456789
4
++++
+++++=
ttt
tttttttH
and hence
2835
176
11340
114)( 3
4 =⋅=Bvol .
3.4 The effect of matrix operations on the number of integral points
Consider the polytope P that is defined as : bAXX d ≤ℜ∈ , where ddA ×ℜ∈ and db ℜ∈ . In this section we study the change of the number
of integral points of P upon performing the usual matrix operations on the matrix A, these operations include interchanging two rows (columns), the

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٨
addition of a row (column) to another row (column), and the transpose of the matrix A.
The study is when n = 2, 3 and n = 4, the computation shows that there is no change in the number of integral points in the case of transpose and in the interchanging of rows or column under certain conditions.
Now we discuss the method for the polytope : bAXX d ≤ℜ∈ , where ddA ×ℜ∈ and db ℜ∈ . In two cases which are:
(I) The case of 22× matrix:
Suppose that
=
2221
1211
aa
aaA , ( )tb 11= . In order to find L(P, t) we use
∫∫=
−−−−
=−−
=mm
d
m
Z
cc
tb
m
tb
Z
mdZ
ZZ
ZZ
itPL
ξξπ )1)...(1(
......
)2(
1),(
1
1
11
11
1 where dcc ,...,1 are the
column vectors of A, here 1,...,01
<< ξξm
are distinct real numbers and
t a positive integer.
We use the standard multivariate notation nw
n
wW vvV L`1
1= .
∫ ∫= =
−−−−
−−=
11 22
21
21
)1)(1()2(
1),(
1
2
1
12
ξ ξπ Z Zcc
tbtb
dZZZ
ZZ
itPL , here 10 12 <<< ξξ .
Let 1,1 2211 <=<= ξξ ZZ and ( ) ( )2212221111 , aacaac == .
By assuming t = 1, 121 == bb we get
∫ ∫= =
−−
−−=
11 22
22122111 12
2121
22
21
2 )1)(1()2(
1)1,(
ξ ξπ Z Zaaaa
dZdZZZZZ
ZZ
iPL
Now let,
)1)(1(
1)(
22122111
2121
2
2
2
1
aaaa ZZZZZZZf
−−=
the poles of f(z) at 2ZZ = are
1. A pole at zero:
Since 22int0 ξ=∈ Z , therefore it is a pole of order two.
2. 01 2111
21 =− aa ZZ then 11
21
1
2
1a
a
ZZ = , 21
11
1
1
2 )1
( a
aZZ = , this is a pole if 22 ξ<Z
therefore,

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٧٩
21
11
21
11
11
2
11
a
a
a
a
ZZ
ξ== , 2
1
1 ξξ
> ( because 10 12 <<< ξξ )
then 21
11
1
1
2 )1
( a
aZZ = ∉ )int( 22 ξ=Z .
3. 01 2212
21 =− aa ZZ then 12
22
1
2
1a
a
ZZ = , 22
12
1
1
2 )1
( a
aZZ =
therefore, 22
12
1
2
1
a
aZ
ξ= , but 2
1
1 ξξ
> ( because 10 12 <<< ξξ ) then
22
12
1
1
2 )1
( a
aZZ = ∉ )int( 22 ξ=Z .
Therefore we have pole of order two at zero only, and its residue has to be computed as follows,
for )1)(1(
1)(
22122111
2121
2
2
2
1
aaaa ZZZZZZZf
−−= , we determine the residues on
the circle 22 ξ=Z with radius 2ξ and center zero, if we consider
2
2
)()(
Z
ZZf
Φ= , where
=Φ )(Z)1)(1(
122122111
2121
2
1
aaaa ZZZZZ −−
1Z can be regarded as a constant, then
[]2
2
1
2221
2
1
2
1
221
2
221
)1)(()1(
)1).(()1(1
)(
222221
222121
−−−
−−−
−−−+
−−−−=Φ′
aaa
aaa
ZZaZ
ZZaZZ
Z
ββα
βαα
[]1
2
2
2
1
222
1
2
2
2
1
2212
1
)1()1(
)1()1(1
)(
212222
222121
−−−
−−−
−⋅−+
−⋅−=Φ′
aaa
aaa
ZZZa
ZZZaZ
Z
αββ
βαα
where 11
1
aZ=α and 12
1
aZ=β therefore
1. If 121 >a and 122 >a then 0)0( =Φ′ therefore L(P,1) = 0 .
Now if 121 =a and 122 >a then

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٠
[ ]1
2
2
2
1
222
1
2
2
221
2 )1()1()1()1(1
)( 2222 −−−−− −⋅−+−⋅−=Φ′ ZZZaZZZ
Z aa αβββαα
2
111)0( −=Φ′ aZ
then
∫=
−=11
11
1
2
12
1)1,(
ξπ Z
a dZZi
PL
2. If 211 >a or 111 <a , then L(P,1) = 0.
3. If 111 =a then ∫=
=11
1
1
1
2
1)1,(
ξπ Z
dZZi
PL =1
If 121 >a and 122 =a then
[ ]1
2
2
221
2 )1()1(1
)( 21 −− −⋅−=Φ′ aZZZ
Z αββ
[ ] 2
12
1
121
)0( −==Φ′ aZZ
β
∫=
−=11
12
1
2
12
1)1,(
ξπ Z
a dZZi
PL
4. If 212 >a or 112 <a then L(P,1) = 0
5. If 112 =a then 11
2
1)1,(
11
1
1
== ∫=ξπ Z
dZZi
PL
If 12221 == aa , then [ ]βα +=Φ′2
1
1
1)(
ZZ
2
1
2
111211)( −− +=Φ′ aa ZZZ then ∫
=
−− +=21
1211
1
2
1
2
1 )(2
1),(
ξπ Z
aa dZZZi
tPL
6. If 211 >a or 111 <a , and 212 >a or 112 =a , then L(P,1) = 0
7. If 111 =a and 112 =a then L(P,1) = 2
This means we have three cases for n = 2, which are

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨١
Case 1: L(P,1) = 0
If
(1) 11, 2221
2221
1211 >>
= aanda
aa
aaA
(2) )12(1,1 111122
22
1211 <>>
= oraaanda
a
aaA
(3) )1 2( 1,1 121221
21
1211 <>>
= aoraanda
a
aaA
(4) )1,(2,,11 12111112
1211 <>
= aaoraa
aaA
Case 2: L(P,1) = 1
If
(1) 1,1
122
22
12 >
= a
a
aA
(2) 1,1
121
21
11 >
= a
a
aA
(3) 1 2,11
11212
12 <>
= aora
aA
(4) 1 2,11
11111
11 <>
= aora
aA
Case 3: L(P,1) = 2
If
=
11
11A
Now we look at the change in L(P,1) when a matrix operation is performed on the matrix A.
That is,
1. We first look at the operation of taking the adjoin, the relation between the number of integral points for : 2 bAXXP =ℜ∈= and
: 2 bXAXP T =ℜ∈= are equal and,

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٢
a. L(P,1) = 0 if there exists a row nR of the matrix A with index n such that 1>nja , where nja are the elements of the row nR , and
there exists a column nC of the matrix A with index n such that 1>ina , where ina are the elements of the column njiCn ,...,1,, = .
b. L(P,1) = 1 if there exists a column jC of the matrix A with
element ija such that 1=ija and 21 >ka , jk ≠ and there exists
a row jR of the matrix A with index j such that njiaij ,...,1,,1 == .
c. L(P,1) = 2 if there exists two columns 1j
C2
, jC of the matrix A
such that 11
=ija and 12
=ija , 211 ,,2 jkjka k ≠≠≥ and there exists
two rows 21
, ii RR of the matrix A such that 1121
== jiji aanda and
for 21 jjC and
2121 ,:,,2,21
iimjjkaR mkii ≠≠> .
2. Interchanging of rows or columns:
The number of integral points for the original polytope and the polytope obtained by interchanging of rows or columns of the matrix A are equal and,
a. L(P,1) = 0 if there exists a row jR of the matrix A with index j
such that 2>jia , where jia are the elements of the row jR , and
column iC of the matrix A, nji ,...,1, = .
b. L(P,1) = 1 if there exists a column jC of the matrix A with
element ija such that 1=ija and 2>ika ,
njijk ,...,1,, =≠∀ .
c. L(P,1) = 2 if there exists two columns of the matrix A such that its elements are equal to one.
3. Sum of two rows or columns:
The relation between the numbers of integral points for the original polytope and the polytope obtained by adding two rows or columns of the matrix A are given as follows:
a. L(P,1) = 0, the conditions are the same as L(P, 1) = 0 for interchanging of rows or columns.
b. L(P, 1) = 1, in this case the number of integral points of the original polytopes and the changing polytopes may not be equal

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٣
under any conditions. For example:
=
51
21A , where L(P, 1) =1,
but when we add two columns the result is
=
56
23B and
L(P, 1) = 0.
c. L(P, 1) = 2, also in this case, the numbers of integral points of the original polytopes and the changing polytopes may not be equal.
c. Multiplying by a constant c > 0:
The relation between the numbers of integral points for the original polytope and the polytope obtained by multiplying a row or column by a constant c > 0 are are given as follows:
a. L(P,1)=0, the conditions are the same as L(P,1)=0 for interchanging of rows or columns.
b. L(P, 1) = 1, in this case, the number of integral points of the original polytopes and the changing polytopes may not be equal
any where for example:
=
51
21A , where L(P, 1) = 1, but when
we multiply by a constant c > 0 the result is
=
53
23B and
L(P, 1) = 0.
c. L(P, 1) = 2, also in this case, the number of integral points of the original polytopes and the changing polytopes may not be equal under any condition.
(II) The case of 33× matrix:
Now if
=
333231
232221
131211
aaa
aaa
aaa
A
This means that the polytope : 3 bAXXP =ℜ∈= 3, Ζ∈b . By theorem (3.3.1) with t = 1 and 1321 === bbb , we get
∫ ∫ ∫= = =
−−−
−−−=
11 22 33
321 )1)(1)(1()2(
1)1,(
23
22
21
3ξ ξ ξπ Z Z Z
cccdZ
ZZZ
ZZZ
iPL
where
( )3121111 aaac = , ( )3222122 aaac = , ( )3323133 aaac = ,1,,0 123 << ξξξ .

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٤
Then
)1()1()1(
)2(
1)1,(
332313322212312111
11 22 33
321321321
1232
32
22
1
3
aaaaaaaaa
Z Z Z
ZZZZZZZZZ
dZdZdZZZZ
iPL
−⋅−⋅−
=
−−−
= = =∫ ∫ ∫
ξ ξ ξπ
the integrand is
)1()1()1( 332313322212312111
321321321
23
22
21
aaaaaaaaa ZZZZZZZZZ
ZZZ
−⋅−⋅−
−−−
now we find the poles for the above function:
1. A pole of order one at zero,
Since 33int0 ξ=∈ Z .
2. 01 312111
321 =− aaa ZZZ then 1312111
321 =aaa ZZZ
31
2111
1
21
3
1 a
aa ZZZ
=
31
1
2111
21
3
1a
aa ZZ
Z =
=
31
21
31
11
11
1
a
a
a
a
ξξ
11
11
>ξξ
)int( 333 ξ=∉ ZZ .
Similarly for the other points.
By assuming
=Φ )(Z)1)(1)(1(
1333231
333
aaa ZZZ γβα −−−
where 231322122111
212121 and , aaaaaa ZZZZZZ === γβα
by generalized Cauchy integral formula at Z = 0, we get
1
3
1
3
2
3
1
333
1
3
1
3
2
3
1
332
133
1
3312
3
)1()1()1(
)1()1()1)()(1(
)1)(1)(()1()(
32313333
33313232
33323131
−−−−
−−−−
−−−
−−−+−−−−−+
−−−−−=Φ′
aaaa
aaaa
aaaa
ZZZZa
ZZZZa
ZZZaZZ
βαγγγαββ
γβαα

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٥
regarding 1Z and 2Z as constants.
Now
If 11,1 333231 >>> aandaa then 0)0( =Φ′ , therefore
L(P, 1) = 0 with 11,1 333231 >>> aandaa .
Ι) If 1,1 333231 >= aaanda
1
3
1
3
2
3
1
333
1
3
1
3
23
1
3321
31
32
331
)1()1( )1()1()1(
)1()1()1()1()(3233333331
32323332
−−−−−−
−−−−−
−−−+−−
−+−−−=′aaaaa
aaaa
ZZZZaZZ
ZZaZZZaZ
βαγγγαββγβααΦ
2111
2131)0( aa ZZa ==Φ′ α
∫ ∫= =
=11 22
2111
122
2
2
1
212)2(
1)1,(
ξ ξπ Z Z
aa
dZdZZZ
ZZ
iPL
∫ ∫= =
−−=11 22
2111
12
2
2
2
12)2(
1
ξ ξπ Z Z
aa dZdZZZi
i) If 12 2121 <> aora , then L(P,1) = 0.
ii) If 121 =a then 1)0( =Φ′ . And
1
2
1
11
11
)2(
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
then
a) If 12 1111 <> aora then L(P, 1) = 0.
b) If 111 =a then L(P, 1) = 1.
Π) If 1,1 333132 >= aaanda then 2212
2132)( aa ZZaZ ==Φ′ β and
∫ ∫= =
=11 22
2212
122
2
2
1
212)2(
1)1,(
ξ ξπ Z Z
aa
dZdZZZ
ZZ
iPL
∫∫=
−
=
−=22
22
11
12
12
2
2
2
12)2(
1
ξξπ Z
a
Z
a dZdZZZi
i) If 12 2222 <> aora then 0)0( =Φ′ , this mean that L(P, 1) = 0.
ii) If 122 =a then 1)0( =Φ′ and 1
2
1
11
12
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If 12 1112 <> aora then L(P, 1) = 0.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٦
b) If 112 =a then 1)0( =Φ′ and hence L(P, 1) = 1.
III) If 1,1 323133 >= aaanda then
2313
2133)( aa ZZaZ ==Φ′ γ and hence
∫ ∫= =
−−=11 22
2313
12
2
2
2
12)2(
1)1,(
ξ ξπ Z Z
aa dZdZZZi
PL
∫∫=
−
=
−=22
23
11
13
12
2
2
2
12)2(
1
ξξπ Z
a
Z
a dZdZZZi
i) If 12 2323 <> aora then 0)0( =Φ′ , this means that L(P, 1) = 0.
ii) If 123 =a then 1)0( =Φ′ and 1
2
1
11
13
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
Then,
a) If 12 1313 <> oraa then L(P, 1) = 0.
I1) If 11,1 333231 >== aandaa
1
3
1
3
2
3
1
333
1
3
1
3
2
3
1
3
1
3
2
3
)1()1()1(
)1()1()1(
)1()1()1()(
3333
3132
33
−−−−
−−−
−−−
−−−+−−−+
−−−=Φ′
ZZZZa
ZZZ
ZZZZ
aa
aa
a
βαγγγαββ
γβαα
then 22122111
2121)0( aaaa ZZZZ +=+=Φ′ βα
hence ∫ ∫= =
+=11 22
22122111
122
2
2
1
21212)2(
1)1,(
ξ ξπ Z Z
aaaa
dZdZZZ
ZZZZ
iPL
∫ ∫= =
−−−− +=11 22
22122111
12
2
2
2
1
2
2
2
12)(
)2(
1
ξ ξπ Z Z
aaaa dZdZZZZZi
i) If ( 12 2121 <> aora ) and ( 12 2222 <> aora ) then L(P, 1) = 0.
ii) If ( 121 212221 <>= aoraanda ) then 1
21211)( −−=Φ′ ZZZ a ,
hence 1
2
1
11
11
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If 12 1111 <> oraa then 0)0( =Φ′ , this means that L(P, 1) = 0.
b) If 111 =a then L(P, 1) = 1.
iii) If )12(1 212122 <>= aoraanda then

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٧
1
2
2
112)( −−=Φ′ ZZZ a , hence 1
2
1
11
12
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If 12 1212 <> aora then 0)0( =Φ′ , this means that L(P, 1) = 0.
b) If 112 =a then L(P, 1) = 1. iv) If 12212 == aa , then
1
2
1
2
1
11
1211 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1111 <> aora and )12( 1212 <> aora , then L(P, 1) = 0.
b) If 111 =a and )12( 1212 <> aora then L(P, 1) = 1.
c) If 112 =a and )12( 1111 <> aora then L(P, 1) = 1.
d) If 111 =a and 112 =a then L(P, 1) = 2. II1) If 11 323331 >== aandaa , then
23132111
2121)0( aaaa ZZZZ +=+=Φ′ γα , then
∫ ∫= =
+=11 22
23132111
122
2
2
1
21212)2(
1)1,(
ξ ξπ Z Z
aaaa
dZdZZZ
ZZZZ
iPL
∫ ∫= =
−−−− +=11 22
23132111
12
2
2
2
1
2
2
2
12)(
)2(
1
ξ ξπ Z Z
aaaa dZdZZZZZi
i) If )12( 2121 <> aora and )12( 2323 <> aora , then L(P, 1) = 0.
ii) If 121 =a and )12( 2323 <> aora , then
1
2
2
111)( −−=Φ′ ZZZ a , hence 1
2
1
11
11
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If )12( 1111 <> aora then 0)0( =Φ′ and L(P, 1) = 0.
b) If 111 =a then L(P, 1) = 1.
iii) If 123 =a and )12( 2121 <> aora , then
1
2
2
113)( −−=Φ′ ZZZ a , hence 1
2
1
11
13
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If )12( 1313 <> aora then L(P, 1) = 0.
b) If 113 =a then L(P, 1) = 1.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٨
iv) If 11 2321 == aanda then
1
2
1
2
1
11
1311 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1111 <> aora and )12( 1313 <> aora , then L(P, 1) = 0.
b) If 111 =a and )12( 1313 <> aora , then L(P, 1) = 1.
c) If 11 1311 == aanda then L(P, 1) = 2.
III1) If 11 313332 >== aandaa then
23132212
2121)( aaaa ZZZZZ +=+=Φ′ γβ , hence
∫ ∫= =
+=11 22
23132212
122
2
2
1
21212)2(
1)1,(
ξ ξπ Z Z
aaaa
dZdZZZ
ZZZZ
iPL
∫ ∫= =
−−−− +=11 22
23132212
12
2
2
2
1
2
2
2
12)(
)2(
1
ξ ξπ Z Z
aaaa dZdZZZZZi
i) If )12( 2222 <> aora and )12( 2323 <> aora , then L(P, 1) = 0.
ii) If 122
=a and )12( 2323 <> aora , then
1
2
2
112)( −−=Φ′ ZZZ a , hence 1
2
1
11
12
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If 12 1212 <> aora then 0)0( =Φ′ , this means that L(P, 1) = 0.
b) If 112 =a then L(P, 1) = 1.
iii) If 123 =a and )12( 2222 <> aora , then
1
2
2
113)( −−=Φ′ ZZZ a , hence 1
2
1
11
13
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If 12 1313 <> aora then L(P, 1) = 0.
b) If 113 =a then L(P, 1) = 1. iv) If 12322 == aa then
1
2
1
2
1
11
1312 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1212 <> aora and )12( 1313 <≥ aora , then L(P, 1) = 0.
b) If 112 =a and )12( 1313 <> aora , then L(P, 1) = 1.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٨٩
IV1) If 1333231 === aaa then
231322122111
212121)( aaaaaa ZZZZZZZ ++=++=Φ′ γβα
∫ ∫= =
++=11 22
231322122111
122
2
2
1
2121212)2(
1)1,(
ξ ξπ Z Z
aaaaaa
dZdZZZ
ZZZZZZ
iPL
∫ ∫= =
−−−−−− ++=11 22
231322122111
12
2
2
2
1
2
2
2
1
2
2
2
12)(
)2(
1
ξ ξπ Z Z
aaaaaa dZdZZZZZZZi
i) If )12( 2121 <> aora , )12( 2222 <> aora and
)12( 2323 <> aora then L(P, 1) = 0.
ii) If 121 =a , )12( 2222 <> aora and )12( 2323 <> aora then
1
2
1
11
12
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If )12( 1212 <> aora , then L(P, 1) = 0.
b)If 112 =a then L(P, 1) = 1.
iv) If 123 =a , )12( 2121 <> aora and )12( 2222 <> aora then
1
2
1
11
13
2
1)1,( dZZ
iPL
Z
a
∫=
−=ξπ
a) If )12( 1313 <> aora then L(P, 1) = 0.
b) If 113 =a then L(P, 1) = 1.
v) If 12221 == aa and )12( 2323 <> aora then
1
2
1
2
1
11
1211 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1111 <> aora and )12( 1212 <> aora then L(P, 1) = 0.
b) If 111 =a and )12( 1212 <> aora then L(P, 1) = 1.
c) If 112 =a and )12( 1111 <> aora then L(P, 1) = 1.
d) If 11211 == aa then L(P, 1) = 2. vi) If 12322 == aa and )12( 2121 <> aora then
1
2
1
2
1
11
1312 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1212 <> aora and )12( 1313 <> aora then L(P, 1) = 0.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٩٠
b) If 112 =a and )12( 1313 <> aora then L(P, 1) = 1.
c) If 113 =a and )12( 1212 <> aora then L(P, 1) = 1.
d) If 11312 == aa then L(P, 1) = 2. vii) If 12321 == aa and )12( 2222 <> aora then
1
2
1
2
1
11
1311 )(2
1)1,( dZZZ
iPL
Z
aa
∫=
−− +=ξπ
a) If )12( 1111 <> aora and )12( 1313 <> aora then L(P, 1) = 0.
b) If 111 =a and )12( 1313 <> aora then L(P, 1) = 1.
c) If 113 =a and )12( 1111 <> aora then L(P, 1) = 1.
d) If 11311 == aa then L(P, 1) = 2. viii) If 1232221 === aaa then
1
2
1
2
1
2
1
11
131211 )(2
1)1,( dZZZZ
iPL
Z
aaa
∫=
−−− ++=ξπ
a) If )1aor2a(),1aor2a( 12121111 <><> and )12( 1313 <≥ aora then
L(P, 1) = 0.
b) If 111 =a and )12( 1212 <> aora then L(P, 1) = 1.
c) If 112 =a , )1aor2a( and )1a or 2a( 11111313 <><> then L(P,1)=1
d) If 113 =a , )12( 1111 <> aora and )12( 1212 <> aora then L(P, 1)=1
e) If 11211 == aa and )12( 1313 <> aora then L(P, 1) = 2.
f) If 11311 == aa and )12( 1212 <> aora then L(P, 1) = 2.
g) If 11312 == aa and )12( 1111 <> oraa then L(P, 1) = 2.
h) If 1131211 === aaa then L(P, 1) = 3.
The obtained results in the case of n=3 are related to the number of integral points for the original polytope and the changing polytope are the same as the case when n=2.

Chapter Three The Ehrhart polynomial of H-Representation of a polytope
٩١
The general case is:
If
=
nnnn
n
aaa
aaa
A
..
..
..
..
..
21
11211
where njia ji ,...,1,, =
are positive integers and t=1, )1...1(=b . For the polytope
: bAXXP d ≤ℜ∈= .
Our obtained results are, The number of integral points is:
1. L(P,1)=0
This will hold if nR or any row of the matrix A has an element niain ,...,1,2 => , where nR is the n-th row of the matrix A, and the
number of integral points does not change when:
a) Interchanging any two columns (rows).
b) Summing two columns (rows).
c) the matrix A is transposed, the condition on A is 1≥ina and njianj ,...,1,,1 =≥ .
2. L(P,1)=1 When nR or any row of the matrix A has an element
niain ,...,1,2 => , where nR is the n-th row of the matrix A, and the
number of integral points does not change when:
a) Interchanging any two columns (rows).
But the number of integral points is change if:
b) Multiplying by a constant c>0.
c) Summing two columns (rows).
d) The matrix A is transposed, the conditions on A that are needed to get the same number of integral points are:
i) The elements of the first row are one.
ii) There exist two rows and columns and where their elements are one.