Embed Size (px)
Citation preview

Siemens Energy & Automation, Inc.
SSIIKKOOSSTTAARRTTTTMM 33RRWW3344 IInnssttrruuccttiioonn GGuuiiddee
SSFFIISS--44551111AA--00449999AApprriill,, 11999999s

Siemens Energy & Automation, Inc.2
Hazardous voltage.Will cause death or serious injury.
Always de-energize and ground the equip-ment before maintenance. Read andunderstand this manual before installing,operating or maintaining the equipment.Maintenance should be performed onlyby qualified personnel. The use of unau-thorized parts in the repair of the equip-ment or tampering by unqualified person-nel may result in dangerous conditionswhich may cause death or serious injury,or equipment or property damage. Followall safety instructions contained herein.
QUALIFIED PERSON
For the purposes of this manual and productlabels, a qualified person is one who is familiarwith the installation, construction, operation ormaintenance of the equipment and the haz-ards involved. In addition this person has thefollowing qualifications:
(a) is trained and authorized to energize,de-energize. clear, ground and tag cir-cuits and equipment in accordance with established safety practices.
(b) is trained in the proper care and use of protective equipment such as rubbergloves, hard hat, safety glasses orface shields, flash clothing, etc., in accordance with established safety practices.
(c) is trained in rendering first aid.
SIGNAL WORDS
The signal words �Danger�, �Warning� and�Caution� used in this manual indicate thedegree of hazard that may be encountered bythe user. These words are defined as:
Danger - Indicates death or serious injury willresult if proper precautions are not taken.
Warning - Indicates death, serious injury orproperty damage can result if proper precau-tions are not taken.
Caution - Indicates some injury or property damage may result if proper precautions are not taken.

Siemens Energy & Automation, Inc. 3
Table of Contents
1 Introduction1.1 Scope of Manual . . . . . . . . . . . . . . . . . . . . . . . .51.2 SIKOSTART 3RW34 Features . . . . . . . . . . . . . . .51.3 Applications and Benefits . . . . . . . . . . . . . . . . . .5
2 Operating Principle2.1 Function Overview . . . . . . . . . . . . . . . . . . . . . . .52.2 Functional Description . . . . . . . . . . . . . . . . . . . .52.3 Three-phase Systems . . . . . . . . . . . . . . . . . . . . .62.4 AC Motor Starting . . . . . . . . . . . . . . . . . . . . . . . .8
3 Controller Selection . . . . . . . . . . . . . . . . . . . . .10
4 Installation4.1 Incoming Inspection . . . . . . . . . . . . . . . . . . . . .104.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114.3 Installation Precautions . . . . . . . . . . . . . . . . . . .114.4 General Wiring . . . . . . . . . . . . . . . . . . . . . . . . .134.5 Power and Motor Connections . . . . . . . . . . . . .154.6 Control Connections . . . . . . . . . . . . . . . . . . . . .174.7 Installation Check . . . . . . . . . . . . . . . . . . . . . . .17
5 Wiring Diagrams5.1 Typical Applications . . . . . . . . . . . . . . . . . . . . . .185.2 Circuit Devices . . . . . . . . . . . . . . . . . . . . . . . . .18
6 Controller Setup6.1 Setup Controls . . . . . . . . . . . . . . . . . . . . . . . . .276.2 LED Indicators . . . . . . . . . . . . . . . . . . . . . . . . .286.3 Controller Setup . . . . . . . . . . . . . . . . . . . . . . . .286.4 Preliminary Checks . . . . . . . . . . . . . . . . . . . . . .286.5 Initial Energization . . . . . . . . . . . . . . . . . . . . . . .286.6 Motor Starting Adjustments . . . . . . . . . . . . . . .29
7 Electrical Specifications . . . . . . . . . . . . . . . . .30
8 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . .32
9 Troubleshooting9.1 Maintenance and Troubleshooting . . . . . . . . . . .339.2 Troubleshooting Tables . . . . . . . . . . . . . . . . . . . .339.3 Inside Delta Wiring Problems . . . . . . . . . . . . . .369.4 Shorted SCR Checks . . . . . . . . . . . . . . . . . . . .379.5 SCR (Thyristor) Testing . . . . . . . . . . . . . . . . . . . .37
10 Spare and Optional Parts10.1 Spare Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . .4110.2 Optional Parts . . . . . . . . . . . . . . . . . . . . . . . . . .43

Siemens Energy & Automation, Inc.4
1 SIKOSTART 3RW34 Block Diagram . . . . . . . . . . . . . . . 62 Basic Three-phase Waveforms . . . . . . . . . . . . . . . . . . . 63 Three-phase Wye-connected Arrangement. . . . . . . . . . 74 Three-phase Delta-connected Arrangement . . . . . . . . . 75 Wye and Delta Motor Connections . . . . . . . . . . . . . . . 86 Typical torque/Speed Curves for
Motor at Reduced Voltages . . . . . . . . . . . . . . . . . . . . . 87 Voltage and Time Curves for
Soft Start with Coast to Stop. . . . . . . . . . . . . . . . . . . . 98 Voltage and Time Curves for
Soft Start with Soft Stop . . . . . . . . . . . . . . . . . . . . . . . 99 Inductive Load Suppression . . . . . . . . . . . . . . . . . . . . 13
10 SIKOSTART ControllerPower and Motor Connections. . . . . . . . . . . . . . . . . . 14
11 SIKOSTART Controller Control Connections . . . . . . . . 1512 Power wiring for single speed, non-reversing motors,
wired. "In Line", in a vented enclosure (circuit breakeror fusible disconnect). . . . . . . . . . . . . . . . . . . . . . . . . 19
13 Control wiring for single speed, non-reversing motors,wired "In Line", in a vented enclosure (circuit breakeror fusible disconnect) . . . . . . . . . . . . . . . . . . . . . . . . 20
14 Power wiring for a single speed, non-reversing motor,wired "In Line" with bypass contactor . . . . . . . . . . . . 21
15 Control wiring for a single speed, non-reversing motor,wired "In Line" with bypass contactor . . . . . . . . . . . . 22
List of Figures
16 Power wiring for single speed, non-reversing motor,wired "Inside Delta" in a vented enclosure, with fusible disconnect and isolation contactor, and short trip circuit breaker. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
17 Control wiring for single speed, non-reversing motor,wired "Inside Delta" in a vented enclosure, with fusible disconnect and isolation contactor, and short trip circuit breaker. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
18 Power wiring for a single speed, non-reversing motor,wired "Inside Delta", with bypass and isolation contactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
19 Control wiring for a single speed, non-reversing motor,wired "Inside Delta", with bypass and isolation contactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
20 Setup Controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2721 Potentiometer Settings . . . . . . . . . . . . . . . . . . . . . . . 2922 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3223 Proper Inside Delta Wiring Connections . . . . . . . . . . . 3624 Typical 720A Power Module. . . . . . . . . . . . . . . . . . . . 3725 Gate Triggering Test Diagram . . . . . . . . . . . . . . . . . . . 3926 Latching/Holding Test Diagram . . . . . . . . . . . . . . . . . . 3927 Typical 35 or 80 Amp SCR . . . . . . . . . . . . . . . . . . . . . 4028 Typical 130 or 240 Amp SCR . . . . . . . . . . . . . . . . . . . 4029 Typical 420 or 720 Amp SCR . . . . . . . . . . . . . . . . . . . 4030 Mounting Lug on ControllerTerminal . . . . . . . . . . . . . 43
List of Tables
1 Controller Ratings for "In Line" Wiring Configurations . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Controller Ratings for "Inside Delta" Wiring Configurations . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Terminal Screw and Ground Stud Nut Torque . . . . . . . 164 3-Lead Connections for
Dual Voltage 9-Lead Wye Motor . . . . . . . . . . . . . . . . . 17
5 6-Lead Connections for Dual Voltage 12-Lead Delta Motor . . . . . . . . . . . . . . . . . . . . . . . . . 17
6 Potentiometer Setting Values . . . . . . . . . . . . . . . . . . . 277 LED Fault Indications . . . . . . . . . . . . . . . . . . . . . . . . . 338 Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349 Inside Delta Wiring Problems. . . . . . . . . . . . . . . . . . . 36
10 Spare Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4111 Lug Kit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Figure Page Figure Page
Table Page Table Page

Siemens Energy & Automation, Inc. 5
11 IInnttrroodduuccttiioonn
1.1 Scope of Manual
This manual provides an overview for the installation, setupand operation of the Siemens SIKOSTART 3RW34 controller.Maintenance data consists of troubleshooting and spare partsinformation. Note that the instructions in this manual do notcover all details or variations in equipment, nor provide forevery possible contingency to be met in connection withinstallation, operation, or maintenance.
1.2 3RW34 SIKOSTART Features
The SIKOSTART 3RW34 product line is the next generation ofSiemens solid state reduced voltage controllers. This controllercombines DSP microprocessor and SCR technologies to provideAC induction motor starting and operation. The sturdy compactframe affords rugged, industrial grade reliability.
The SIKOSTART 3RW34 controller is a single ramp style con-troller using phase control for the operation of three-phaseinduction motors. The controller can be set to operate eitherwye (star) or delta type motors. Each unit includes soft startand stop parameters plus fault detection. The controller can beused with an electro-mechanical starter or, when combinedwith an overload relay, the controller can be used as a solid-state starter.
The SIKOSTART 3RW34 controller is available as an open type(compact frame, no enclosure) or in a NEMA 1, 3R, 4, or 12enclosure. The unit can be ordered as a starter with overloadrelays or as a combination starter with disconnecting meansand circuit overload protection devices. Additional options arealso available such as push buttons, pilot lights, and meters.
1.3 Applications and Benefits
Typical applications for the SIKOSTART 3RW34 controller areto soft start and soft stop AC induction motor driven equip-ment such as fans, pumps and compressors. Applicationsalso include controlling machines with gearbox, belt or chaindrive elements, such as: conveyors, sanders, planers, saws,packaging machines and punch presses.
Using the SIKOSTART 3RW34 controller provides benefits tothe drive system in the following ways:
1) the life of mechanical drive transmission elements isextended, e.g., gearbox jerking is substantially reduced result-ing in less wear and tear;
2) reduced starting current relieves the supply network of cur-rent peaks; and
3) smoother acceleration of loads eliminates process or productdamage.
22 OOppeerraattiinngg PPrriinncciippllee
2.1 Function Overview
The SIKOSTART 3RW34 controller utilizes a voltage rampdesign to produce an output voltage to the motor that increas-es from a customer selected initial voltage to full line supplyvoltage over an adjustable starting time. This �voltage ramp�produces a reduced current start (soft start) similar to a cur-rent limit start without the load dependence of the currentlimit type start. Similarly, stopping time can be adjusted toprovide a soft stop for many pumping applications.
The SIKOSTART controller employs a DSP (digital signalprocessor) to control the motor. This advanced type of micro-processor allows the controller to �contour� the starting andstopping ramps. This contour adjusts for the nonlinearities ofan induction motor to produce a smoother and more linearmotor start and stop.
2.2 Functional Description
Power Poles. As is shown in the block diagram of figure 1, theincoming main power (L1, L2, L3) is connected to the con-troller�s three power poles which control the voltage to themotor windings. Each power pole consists of two SCR�s in aback-to-back arrangement for each phase which allows alter-nating current to pass to the motor.
Snubber PCB. The snubber printed circuit board(s) containsthe trigger circuit for each SCR. The firing signal for each trig-ger circuit is generated at the logic printed circuit board. Thesnubber board sensing circuits send data to the logic board forfactoring into firing signal generation. The snubber board alsoincludes an RC network for a degree of protection againstfalse firing of the SCR�s due to dv/dt and MOV�s for transientprotection.

Figure 2 Basic Three-phase Waveforms
2.3 Three-phase Systems
Since the controller can be used with either wye or deltamotors, a brief discussion of currents and voltages for three-phase wye and delta arrangements with balanced loads isincluded here as an aid to understanding controller setup pro-cedures and to assure proper controller selection.
Figure 2 shows the voltage waveforms for a three-phase sys-tem of three equal voltages separated by 120-degree phaseangles. The voltage in phase a, or Ua, leads the voltage inphase b, or Ub, by 120I. Likewise, Ub leads Uc by 120I, andUc leads Ua by 120I.
Siemens Energy & Automation, Inc.6
The three sets of numbered output terminals are for customercontrol devices related to Motor Running (e.g., start / stopdevices), Motor Running at Full Voltage (e.g., to drive a bypasscontactor), and Fault (e.g., phase loss or shorted SCR).
Setup Controls. Setup controls are connected to the logicboard but are accessible from the controller�s front cover.Three potentiometers provide customer adjustments: T1 - therate of the voltage rise (accel ramp time); U - the initial motorstart voltage; and T2 - decel ramp time for a soft stop (pumpstop).
A dip switch (SW1, figure 20) is used to set the controller soft-ware to the proper application. The functions set are:
1. delay at stop: when bypass contactor is used.
2. delay at start: when isolation contactor is used.
3. motor type: wye (star) or delta
4. Fault output: opens or closes on fault.
Figure 1 3RW34 SIKOSTART Block Diagram Logic PCB. Apower supply on the logic printed circuit board accepts controlpower (X1, X2) and provides power to the central processingunit (DSP), support circuitry, and cooling fan(s). The input coilterminals (A1, A2) are for commanding the motor to RUN andSTOP.
Figure 1

Siemens Energy & Automation, Inc. 7
2.3.1 Wye Connection
Figure 4a represents a three-phase wye-connected motorwith three sources connected to supply voltages, U1,2, U2,3,and U3,1. The SIKOSTART controller is connected in line withthe motor windings.
As can be seen, the source current, the SIKOSTART current,and the motor winding current are all equal.
Figure 3 Three-phase Wye-connected Arrangement
2.3.2 Delta Connection
Figure 4b represents a three-phase delta-connected motor.The three sources are connected to supply voltages, U1,2,U2,3, and U3,1. The SIKOSTART controller is connected insideof the delta in series with the motor winding.
As can be seen, the source or line current is split betweentwo motor windings. The winding current and SIKOSTARTcurrent is therefore less than the source or line current. Notethat the magnitude of a line current is greater than the magni-tude of a winding and SIKOSTART current by a factor of thesquare-root-of-three (1.73). This allows the SIKOSTART con-troller to operate a motor of a higher current rating when con-nected inside of the delta.
Figure 4 Three-phase Delta-connected Arrangement
Figure 3a
Figure 3b
Figure 4b
Figure 4a

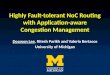
Figure 6 Typical Torque/Speed Curves for Motor at Reduced Voltages
2.4 AC Motor Starting and Stopping
Figure 6 shows three torque/speed curves (a, b, c) for a typi-cal induction motor.
a This curve shows the torque/speed relation when the motor starting voltage, U, is 100% of line voltage (Ue).
b This curve shows the relation when the controller voltage potentiometer, U (initial soft start voltage setting) is set for 75% of line voltage.
c This curve shows the relation when the controller voltage potentiometer is set for 50% of line voltage.
The curve a motor (without soft starting) produces a very hightorque across most of the speed range, whereas, the curvesb and c motors (with soft starting) produce a much lower andadjustable torque. This allows slower and smoother accelera-tion of the motor and its load.
Torque of the motor in the case of a direct-on-line starting
@Um (0) = 100% Ueb starting with 3RW34
@Um (0) = 75% Uec startingwith 3RW34
@Um (0) = 50% Ue
Relationship of voltage andspeed with respect to timein the case of soft - starting.Showing the effect of thepotentiometers Um and trlocated on the front panel ofthe devices.
Siemens Energy & Automation, Inc.8
Figure 5 Wye and Delta Motor Connections
2.3.3 Controller-to-Motor Connections
Wye Motor. The controller can be used for either a three- leador nine-lead wye motor. Connecting the controller to a wyemotor inserts the SCR�s directly in the line wiring, referred toas �In Line� wiring.
Delta Motor. The controller can be used for either 6 or 12lead delta motors. If the motor is hard wired as delta, the con-troller must be connected and sized with �In Line� wiring asshown in figure 5a.
Figure 5b shows the controller connected with the thyristorsinside the delta, referred to as �Inside Delta� wiring. ForInside Delta wiring, the controller power rating may beincreased (line current = 1.73 phase current, figure 4) relativeto the In Line power rating.
Figure 5a
Figure 5b

Siemens Energy & Automation, Inc. 9
2.4.1 Soft Start with Coast to Rest
Figure 7 shows the relationship of voltage and speed withrespect to time when a soft start is used with coast to rest.The controller potentiometers have been set as follows.
U The initial voltage is set at approximately 30%.
T1 The start time setting is greater than 0.
T2 The stop time is set at 0 which allows the motor to coast to a stop.
On the voltage/time graph, the voltage starts at U when therun coil is energized and increases to 100% within the T1 timesetting. The voltage immediately drops to zero when the runcoil is de-energized.
The �speed/time� graph shows the motor accelerating from 0,when the run coil is energized, to operating speed. The timerequired to accelerate may be more or less than the T1 settingdepending on the connected inertia. The motor speed coaststo zero when the motor is de-energized.
Figure 7 Voltage and Time Curves for Soft Start with Coast to Stop Figure 8 Voltage and Time Curves for Soft Start with Soft Stop
2.4.2 Soft Start with Soft Stop
Figure 8, like figure 7, shows the voltage and speed curves fora soft start but with controlled deceleration. The potentiome-ters have been set as follows.
U The initial voltage is set at approximately 30%.
T1 The start time setting is greater than 0.
T2 The stop time setting is greater than 0 which allows the motor to soft stop.
The motor starting ramp is similar to the one shown in figure 7.But, when the run coil is de-energized, a motor stopping rampis formed where the motor voltage starts at 100% anddecreases to 80% of U (the initial start voltage) within the T2time setting. Then the voltage immediately drops to zero. Thetime required to decelerate may be more or less than the T1setting depending on the connected inertia.
When the run coil is de-energized, the speed decreasesthroughout the T2 time period and then coasts to zero.

44 IInnssttaallllaattiioonn
4.1 Incoming Inspection
1.Unpack the controller from the carton and inspect for ship-ping damage. Check that the items on the packing list agreewith the order. File claims for loss or damage with the freightcarrier immediately.
2. If the controller will not be installed immediately, it shouldbe stored in a clean, dry area where the ambient temperatureis between 0IC and 70IC. Avoid storage environments withcorrosive atmospheres or high humidity.
Note: Installation must be performed by qualified personnel asindicated on page 2 of this manual.
3. The carton and packing materials should be retained in casethere is a future need to return the controller to the factory forservice or repair. The carton and packing material are especial-ly fitted to protect the controller from shipping damage.
If these materials are not used for shipping, claims for ship-ping damage may be rejected by the freight carrier.
Voltage or fire hazard.Can cause death, serious injury, orproperty damage.
To prevent electrical shock or burns,do not leave foreign objects (wire clip-pings, metal chips, etc.) either insideor on top of the controller duringinstallation procedures.
Heavy equipment.
May cause injury or property damage.
To avoid personal injury or controllerdamage, do not use the controller coveras a handle when moving and/or posi-tioning the unit.
Siemens Energy & Automation, Inc.10
33 CCoonnttrroolllleerr SSeelleeccttiioonn
Table 1 Controller Ratings for �In Line�Wiring Configurations
50°C at Listed Voltage
�In Line�Catalog Wiring Horsepower at Voltage
Number Amps 200V 230V 460V 575V
3RW3452... 35A 10 10 25 303RW3454... 57A 15 20 40 503RW3455... 69A 20 25 50 603RW3456... 80A 25 30 60 753RW3458... 105A 30 40 75 1003RW3465... 131A 40 50 100 1253RW3466... 195A 60 75 150 2003RW3467... 248A 75 100 200 2503RW3472... 361A 125 150 300 3503RW3483... 480A 175 200 400 5003RW3484... 720A 250 300 600 7003RW3486... 960A 350 400 800 1000
Each controller has two ratings: �In Line� and �Inside Delta.�Inside Delta ratings are higher than In Line ratings. Be sureto select equipment with the proper ratings for the typeof connections used.
Tables 1 and 2 list the SIKOSTART controller partial catalognumbers and ratings at various rated voltages.
Table 1 is for �In Line� wiring configurations only and showscurrent and horsepower ratings for units at various rated volt-ages.
Table 2 is for �Inside Delta� wiring configurations only andshows current and horsepower ratings for units at variousrated voltages.
50°C at Listed Voltage
"Inside Delta"
Catalog Wiring Horsepower at Voltage Number Amps 200V 230V 460V 575V
3RW3452... 57A 15 20 40 50
3RW3454... 105A 30 40 75 1003RW3455... 131A 40 50 100 1253RW3456... 165A 50 60 125 1503RW3458... 195A 60 75 150 2003RW3465... 248A 75 75 200 2503RW3466... 361A 100 125 300 3503RW3467... 414A 125 175 350 4003RW3472... 602A 200 250 500 6003RW3483... 720A 250 300 600 7003RW3484... 1200A 400 500 1000 12003RW3486... 1600A 500 600 1300 1700
Table 2 Controller Ratings for �Inside Delta�Wiring Configurations

Siemens Energy & Automation, Inc. 11
4.2 Mounting
1. Section 8 of the manual contains controller mountingdimensions and data. Air flow through the unit is vertical,from bottom to top.
2. Adequate cooling is essential for proper operation. Leave atleast 6 inches of clearance above and below the unit to allowunimpeded convection or fan air flow. Wire bendingallowance may require more than this recommended mini-mum clearance.
3. When mounting the controller in an enclosure, the enclo-sure must be properly sized or ventilated to provide coolingfor the continuous power dissipation in the thyristors, approxi-mately 3 watts per ampere of continuous rating. The follow-ing vent areas are required for each inlet and each outlet oncustomer furnished NEMA 1 enclosures, motor control cen-ters, etc.
Vent Area Continuous Amps HP at 460Vnot req�d up to 57A 40 HP20 sq. in. up to 131A 100 HP40 sq. in. up to 248A 200 HP80 sq. in. up to 480A 400 HP120 sq. in. up to 960A 800 HP
Locate front ventilation air inlet vent at least 3 inches belowthe bottom edge of the controller. Locate the outlet air ventarea at least 6 inches above the controller top edge. Air filtersimpede air circulation and require a fan at inlet and/or outlet.
Some NEMA 12 enclosures use bypass contactors or heatexchange devices to maintain the integrity of the NEMA 12rating. Establish a maintenance schedule for enclosures withheat exchangers. Equipment cleaning frequency should bebased on the operating environment.
Fire hazard.Can cause death, serious injury, orproperty damage.
To prevent a fire, the controller, espe-cially a non-fan-cooled unit, must bemounted with its fins in a vertical direc-tion only. Side ways mounting andimproper ventilating can result in fire.
4.3.1 Motor Branch Circuit
The National Electrical Code (NEC) and local regulations governthe installation of the SIKOSTART controller and the motor itwill control. Refer to NEC Article 430 for requirements anddata regarding 1) motor disconnecting means, 2) motor branchcircuit short circuit and ground fault protection, and 3) motoroverload regulations. Figure 10 shows the components gen-erally required to meet the various regulations. The overloadrelay indicated in the figure is necessary but the standardSIKOSTART controller is not furnished with an overload relay.
The SIKOSTART controller does not utilize electronic means toprotect itself from damage due to short circuits applied to themotor terminals or from the motor terminals to ground.Suitable branch circuit protection must be provided per NECcode.
The following precautions are intended for use as guidelinesfor proper installation of the controller. Because of the varietyof applications, all of these precautions may not pertain toyour system and they are not all-inclusive. In addition to thefollowing, refer to codes and standards applicable to your par-ticular system.
4.3 Installation Precautions
Hazardous voltage.Can cause death, serious injury, orproperty damage.
To avoid electrical shock, this controllerMUST be wired with motor disconnect-ing means and branch circuit protectionbecause the controller does not provideelectrical isolation to the motor whenthe controller is OFF.

Siemens Energy & Automation, Inc.12
4.3.2 Controller Protection
When planning your installation, be aware of potential hazardsto personnel and to the controller that can be caused by con-trol devices used in the system or by unique system features.
Motor Disconnect. When any motor disconnect device con-nected to the controller output (motor) terminals is openedduring operation, the controller continues to source full volt-age if running. If the disconnect device is reclosed, the motorwill be restarted at full voltage. When the disconnect deviceis opened, a hazardous voltage is present at the controller out-put terminals due to thyristor and snubber leakage.
Motor Start/Stop. For normal operation, the controller isdesigned to start and stop the motor by using signals that areinput to the controller's circuitry. Do not use the device thatdisconnects and reapplies line power to the controller for ordi-nary starting and stopping of the motor.
Asymmetric Motor Windings. Some delta motors arewound (or re-wound) asymmetrically. This can cause lowavailable starting torque and noisy starting operation.
Power-factor-correcting (PFC) Capacitors. Do not use PFCcapacitors at the controller output terminals. Connection tothe output terminals will damage the controller. If PFC capac-itors are used, they must be connected on the line side of thecontroller.
When an isolation contactor is used with the controller, thePFC capacitors must be disconnected from the controllerwhen the isolation contactor is open (see figure 10).
Hazardous Environment. Depending on the system environ-ment, consideration must be given to unexpected hazards
Hazardous voltage.Will cause death or serious injury.To avoid electrical shock or burn, donot touch controller output terminalswhen voltage is applied to the controller. Output terminals will havevoltage present even when con-troller is OFF.
Hazardous voltage.May cause property damage.To avoid damaging solid-statepower devices, do not connectpower-factor-correcting capaci-tors to the load side of the controller.
such as an accidental spray of gas, liquid or solid particles orinadvertent contact with moving machinery. Since the con-troller�s start/stop control circuitry includes solid-state compo-nents, a potentially hazardous environment may require theinstallation of an additional hard wired emergency stop circuitthat will either disconnect AC input power to the SIKOSTARTcontroller or disconnect the motor from the controller.
Multiple Motors. When the controller is used for more thanone motor, be sure the combined full load current (sum of indi-vidual motor FLA�s ) does not exceed the controller�s rated out-put current. Each motor requires separate overload relay pro-tection.
Bypassing the Controller. When the controller is mounted ina sealed enclosure, a bypass contactor generally is used toprevent heat from being generated by the thyristors duringrunning. If not bypassed during operation, supplemental cool-ing may be required depending on operating current andenclosure size and type.
4.3.3 Electrical Noise Suppression
Noise usually enters solid-state controls through power supplylines, input lines and output lines. Sources of electrical noisewhich can be suppressed within the power distribution systeminclude:
1) inductive loads, such as relays, solenoids, motors, andmotor starters operated by hard-contact devices, such as pushbuttons or selector switches,
2) AC feeders,
3) high level noise generators, such as arc furnaces, high-fre-quency welders, large AC machinery, etc.; consider electrostat-ically shielded power transformers for suppression.
The most reliable way of minimizing noise coupling is to iso-late the noise generating devices and associated wiring fromsensitive control wiring. Group components and wires accord-ing to signal levels and connect noise suppressors close to thenoise generators. Noise suppressors are electric componentswhich are used to filter, or minimize, the effect of indirect(capacitive or inductive) coupling.
Recommended suppression practices for the noise sourceslisted above are:
1) For an inductive load, refer to paragraph 4.4.4.
2) On AC feeders, use RF line filters.
3) On high level noise generators, use electrostatically shield-ed power transformers.
4.4 General Wiring
Many startup difficulties are due to incorrect wiring. Observethe following general instructions as well as the specificinstructions in later paragraphs and in system instructions.

Siemens Energy & Automation, Inc. 13
4.4.1 Power and Motor Wiring
Power supply and motor wiring ampacity should be based onthe current ratings of the motor as specified on the name-plate and in compliance with NEC and local codes. Powerand motor supply wiring should be routed in its own separateconduit or wireway.
Each SIKOSTART controller is available in several power sup-ply voltage range models. Ensure that the supply voltage andfrequency are within the rated range of the controller.
When welding cable or other fine wire cables are used forpower wiring, use crimp type solderless terminals due to thefine strand characteristic of this cable. Screw type compres-sion terminals are not recommended. The fine wires can jamthe threads of the terminal and prevent sufficient compres-sion of the wire strands. In addition, the fine wires can relaxin the terminal, which can lower the compression of thecable. If the contact ends of the cable are not properly com-pressed, arcing can occur with the risk of a fire.
4.4.2 GroundingThe controller enclosure and the motor frame must be proper-ly grounded in a manner that meets all applicable wiringcodes. A ground stud at the line and motor terminals on thecontroller frame is provided for connecting the SIKOSTARTcontroller to system earth ground.
A complex system must have only one ground point to com-mon power supplies, signal returns, etc. to prevent groundloops. In most cases a large grounded metal object, such asa control cabinet, may be considered a single point. Using ashort ground wire to a cabinet is better than using a longground wire to a terminal barrier bussing point.
Fire hazard.Can cause death, serious injury,or equipment damage.Welding cable requires crimp typesolderless terminals to preventarcing and possible fire,
Figure 9 Inductive Load Suppression
4.4.3 Control WiringThe control wiring is connected at the logic board terminalsshown in figure 11.
Control Voltage. Each SIKOSTART controller is available inseveral control voltage models. Ensure that the control volt-age and frequency supplied match the controller model.
Wire Specifications. Each control terminal can accept a max-imum of two 14-AWG stranded wires. Be sure ring tongueterminals are sized correctly for the wire.
Labeling. Each wire should be appropriately labeled usingtape, shrink-tubing, or other dependable method.
Routing. All control wiring must be kept separate from powerand motor wiring and run in its own separate conduit. Keepcontrol wire bundles physically separatedfrom power wiring by at least 6 inches. Where control andpower wiring must cross, they should intersect at right angles.
4.4.4 Coil SuppressionRelay, electromechanical brake, or solenoid coils produce elec-trical noise transients (especially when being de-energized)which can be coupled into the controller circuitry and causeerratic operation. For all such devices connected to or nearthe controller or its wiring, see figure 9 and observe the fol-lowing.
24V DC Coils. Connect a diode directly across each DC coil.A 1N4004 diode is acceptable for most 24V DC applicationsup to 1.0A. A varistor or surge suppressor can also be used inplace of the diode.
120V AC Coils. Use an R-C circuit (0.47 mfd, 600V capacitorin series with a 1/4 watt 220 ohm resistor) across each 120VAC coil. An appropriately rated varistor or surge suppressorcan be used in place of the R-C circuit, however, R-C circuitsare recommended because they limit the rate of rise of noiseand thus help eliminate high frequency components.
220 ohm

Siemens Energy & Automation, Inc.14
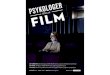
Figure 10 SIKOSTART Power and Motor Connections
L1
L2
L3
PE

Siemens Energy & Automation, Inc. 15
Figure 11 SIKOSTART Control Connections
Fault OutputContact (see SW1-4 to set for OPEN or CLOSE on Fault)
Motor at 100%Voltage Output
Run OutputContact
Control Power Supply

Siemens Energy & Automation, Inc.16
4.5 Power and Motor Connections
The controller input terminals L1, L2 and L3, are at the top ofthe unit and the output terminals T1, T2 and T3 are at the bot-tom of the unit (figure 10). Observe the following:
1. Torque the power and motor terminal set screws accordingto the wire size as indicated in table 3. Lug kits are listed inSection 10, Spare and Optional parts, of this manual.
2. Torque the ground stud nut according to controller opera-tional current as indicated in table 3.
Hazardous voltage.Will cause death or serious injury.To avoid electrical shock or burn,turn off main and control voltagesbefore performing installation ormaintenance.
Wrong power rating may cause injuryor property damage.Confirm that the correct HP rating for thecontroller corresponds to the type of con-nections being used; e.g. don�t useInside Delta rating for a controller wiredIn Line.
Threaded TorqueItem (lb-in.)
Terminal ScrewWire Size (AWG or MCM)*6 to 4.................................................................1003 to 2.................................................................1251 ........................................................................1351/0 to 2/0...........................................................1503/0 to 4/0...........................................................225250 to 400.........................................................290500 to 600.........................................................335Nut on Ground StudController Operational Current<= 105A ..............................................................75>= 133A-248A ...................................................110>= 361A............................................................150
* for 75IC Aluminum or Copper Wire
Table 3 Terminal Screw and Ground Stud Nut Torque
4.5.1 Power Connections
1. Connect the proper capacity 3-phase 50/60 Hz voltagesource to the controller input terminals L1, L2, and L3. Theseterminals are not phase sensitive.
The voltage source must be correct because:
a. Connecting the controller to a line voltage higher than its rat-ing will open the protective resistor in the snubber board andprevent controller operation; repair will be required before thecontroller can be put into operation.
b. Connecting the controller to a line voltage lower than its rat-ing will: 1) cause erratic controller operation resulting in dam-age to the motor, or 2) prevent controller operation due to thelow control voltage lockout protective feature.
2. Connect the ground terminal (labeled with ground symbol)to earth ground.
4.5.2 Motor Connections
1.The NEC motor overload protection requirement can be metwith an optional overload relay.
2. The controller can be used for wye or delta motors with con-nections to the motor as either In Line wiring or Inside Deltawiring (paragraph 2.3.3). Be sure the power ratings are correctfor the type of connection required for the application; refer tosection 3.
3. For a dual voltage 9-lead wye motor (represented in figures12 and 13), the 3-lead controller-to-motor terminal connectionsare listed in Table 4.
Hazardous voltage.Can cause death, serious injuryor property damage.The controller case must begrounded to earth for operator�ssafety.

Siemens Energy & Automation, Inc. 17
Table 5 6-Lead Connections for Dual Voltage 12-Lead Delta Motor
High Voltage Wiring Low Voltage Wiring
Controller Motor Controller MotorConnection Terminal Connection Terminal
T1 T1 T1 T1 & T7
T2 T2 T2 T2 & T8
T3 T3 T3 T3 & T9
T6 T12 T6 T6 & T12
T4 T10 T4 T4 & T10
T5 T11 T5 T5 & T11
T4-T7*
T5-T8*
T6-T9*
* Jumper
6. For multispeed application, the SIKOSTART controller canbe used with an electromechanical starter to provide softstart. The controller output must be connected to the lineinput of the multispeed starter. Individual motor overload pro-tection should be supplied for each motor speed separately.During speed transitions, control input (A1, A2) must be �off�for a minimum of 200 milliseconds.
7. When using the controller with part winding motors, thesemotors must be connected in their full voltage run windingconfiguration, and the three motor leads connected to thecontroller output terminals.
8. The motor frame should be connected to the earth groundterminal.
4.6 Control Connections
1. Connect the control power supply (Us) specified on the con-troller label to the X1 and X2 terminals; see figure 11.
2. Connect control circuit pilot devices in accordance with theapplication. Section 5 provides examples of several typicalarrangements; section 6 describes the dip switch (SW-1) set-tings.
4.7 Installation Check1. Check that all wiring and power connections are secure andthat mounting bolts are tight.
2. Remove all wire cuttings, installation particles, metal chipsand debris before energizing.
3. Shut enclosure doors to protect equipment from dust andpersonnel from hazardous voltage.
High Voltage Wiring Low Voltage Wiring
Controller Motor Controller MotorTerminal Terminal Terminal Terminal
T1 T1 T1 T1 & T7
T2 T2 T2 T2 & T8
T3 T3 T3 T3 & T9
T4-T7* T4-T5-T6*
T5-T8*
T6-T9*
* Jumper * Jumper
Table 4 3-Lead Connections for Dual Voltage 9-Lead Wye Motor
4. A 6-lead delta motor connection is shown in figures 16 and17. Connections from controller to motor are one on one, i.e.,T1 to T1,T2 to T2, etc.
5. For a dual voltage 12-lead delta motor (represented in fig-ures 16 and 175), the 6-lead controller-to-motor connectionsare listed in Table 5.

Siemens Energy & Automation, Inc.18
55 WWiirriinngg DDiiaaggrraammss
5.1 Typical Applications
This section contains four wiring diagram sets for typical appli-cations as follows.
Figure 12 & 13 - Two Single Speed, Non-reversing Motors,Wired In Line, in a Vented Enclosure
Figure 14 & 15 - Single Speed, Non-reversing Motor, Wired InLine, with Bypass Contactor
Figure 16 & 17 - Two Single Speed, Non-reversing Motors,Wired Inside Delta,in a Vented Enclosure, 1 with IsolationContactor,1 with Shunt Trip
Figure 18 & 19 Single Speed, Non-reversing Motor, WiredInside Delta, with Bypass and Isolation Contactors
Each diagram set consists of two sheets: one showing thepower and motor connections and one showing the controlwiring. The SW1 chart at the bottom of the power and motordiagram indicates the switch settings required for that particu-lar configuration (refer to paragraph 6.1).
5.2 Circuit Devices
Common Circuit Devices. Some circuit devices common toeach application shown include:
� an overload relay (1OL, 2OL) for motor protection;
� either a circuit breaker (1CB) or a fused disconnect switch(1DS/1FU) to connect and disconnect main power to the appli-cation;
� a Start/Stop control that is connected so when the startswitch is pushed, the RUN coil in the controller is energized,and the controller RUN interlock contact closes and latches inthe RUN coil. When the stop switch is pushed or power islost, the circuit is broken and the controller drops out whichshuts off power to the motor. If a two wire Start/Stop controlconnection is used, the motor may automatically restart whenpower is restored to the controller.
Bypass Contactor. The applications shown in figures 13 and15 include a bypass contactor (2M). The bypass contactor israted to handle the running current of the motor but not thestarting current. The bypass contactor remains open until thecontroller has soft-started the motor. Once the motor is oper-ating at line voltage, the Up-to-Voltage contact closes and thebypass contactor is energized causing motor current to flowthrough the bypass contactor rather than the controller.
A bypass contactor is useful when the controller is mounted ina NEMA 4, 12 or other airtight enclosure. When the motor cur-rent is routed through the bypass contactor, no current isflowing through the controller SCR�s, and the controller gener-ates no heat.
For both applications, the switch section SW1-1 is set to theturn off delay position so that the bypass contactor de-ener-gizes before the controller (refer to paragraph 6.1).
Isolation Contactor. The applications shown in figures 14 and15 include an isolation contactor. The isolation contactor isenergized when the controller is operating (RUN coil is On) andprovides power to half of the windings of the 6-lead deltamotor. If a controller fault occurs, the fault contact openswhich de-energizes the isolation contactor and the motorstops.
For both applications, switch section SW1-4 is set to open thefault contact on fault detection and switch section SW1-2 isset so that the isolation contactor energizes before the con-troller (refer to paragraph 6.1).
Shunt Trip. A shunt trip circuit breaker is used on the secondmotor in figure 14. The switch section SW1-4 is set to closethe fault contact on fault detection. With the circuit breaker(1CB) closed and the controller operating (RUN coil is On), theshunt trip coil is de-energized. If a controller fault occurs, thefault contact closes to energize the shunt trip coil which tripsopen the circuit breaker and disconnects power to the con-troller and motor.
The figure 14 application shows two methods of using thecontroller fault contact to stop the motor when a fault occurs:1) the fault contact opens to de-energize the isolation contac-tor for the first motor (1MTR) and 2) the fault contact closesto operate the shunt trip on the circuit breaker for the secondmotor (2MTR).

Siemens Energy & Automation, Inc. 19
Figure 12Power wiring for single speed, non-reversing motors, wired "In Line", in a vented enclosure (circuit breaker or fusible disconnect)

Siemens Energy & Automation, Inc.20
Figure 13 Control wiring for single speed, non-reversing motors, wired "In Line", in a vented enclosure (circuit breaker or fusible disconnect)

Siemens Energy & Automation, Inc. 21
Figure 14Power wiring for a single speed, non-reversing motor, wired "In Line" with bypass contactor

Siemens Energy & Automation, Inc.22
Figure 15Control wiring for a single speed, non-reversing motor, wired "In Line" with bypass contactor

Siemens Energy & Automation, Inc. 23
Figure 16Power wiring for single speed, non-reversing motor, wired "Inside Delta" in a vented enclosure, with fusible disconnect and isolation contactor,
and shunt trip circuit breaker.