What are Optical Encoders ? An Optical Rotary Encoder is an
electro-mechanical device that converts the angular position of a
shaft to a digital code. Provide information on angular position,
speed, and direction. The information is used for system control
(e.g. motor velocity feedback control). It is the most popular type
of encoder. What are they used for?
Slide 4
How do they work? Use light and photo detectors to produce a
digital code As the encoder shaft rotates, output signals are
produced proportional to the angle of rotation. The signal may be a
square wave (for an incremental encoder) or an absolute measure of
position (for an absolute encoder).
Slide 5
Optical Encoder parts Code disk: has one or more tracks with
slits (windows) to allow light to pass through. Photodetector:
electronic sensor that reacts to light. Usually a phototransistor
or photodiode. Light source: produces the light that will trigger
the photodetectors during motion. Usually LEDs or IR LEDs Mask:
collimates the beams of light
Slide 6
Optical Encoder parts Shaft: mechanically attached to the
system we want to measure; usually a motor. Housing: protection
from the environment. Electronic board: filters signal into square
wave used by microcontroller.
Slide 7
Types of Optical Encoders Absolute Optical Encoders Incremental
Optical Encoders: Single channel Dual channel Dual channel with Z
index
Slide 8
Incremental Encoders Generate a series of pulses as the shaft
moves and provide relative position information. They are typically
simpler and cheaper than absolute encoders. Need external
processing of signals. TYPES
Slide 9
Incremental Optical Encoder: Single channel Has only one output
channel for encoding information. Used in unidirectional systems or
where you dont need to know direction. Lo Hi Lo Hi Lo 0 1 0 1 0
Voltage Binary
Slide 10
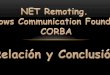
Incremental Optical Encoder: Dual channel The output has two
lines of pulses (A and B channel) They are 90 offset in order to
determine rotation direction. This phasing between the two signals
is called quadrature. Lo Hi Hi LoChannel A Lo Lo Hi HiChannel B
Repetitive sequence
Slide 11
Incremental Optical Encoder: Dual channel
Slide 12
Incremental Optical Encoder: Dual channel with Z index Some
quadrature encoders include a third channel (Z or Index) It
supplies a single pulse per revolution used for precise
determination of a reference position. Need to do homing for it to
work. Doesnt hold after power down. Z
Slide 13
Absolute Encoders Provides a unique digital output for each
shaft position The code disk has many tracks. The number determines
resolution. Upon a loss of power it keeps the correct position
value. Uses binary or grey code.
Absolute encoders: Binary vs. Gray code 000 100 001011 010 110
111101 Transition possible results:010 - 110
Slide 17
Encoder Resolution Resolution can be given in number of bits or
degrees Depends on the number of tracks on the code disk. Each
track requires an output signal, also known as an encoder bit.
Absolute Optical Encoder Resolution = 360/(2 N ) N = number of
encoder bits (number of tracks) Example: An absolute encoder has 8
tracks on the disc. What is its angular resolution in degrees?
Resolution = 360/(2 N ) = 360/(2 8 ) = 1.4
Slide 18
Encoder Resolution Resolution essentially depends on the number
of windows on the code disk Incremental Optical Encoder Resolution
= 360/N N = number of windows on code disk BUT, we can increase
resolution by using channels A and B Example: What number of
windows are needed on the code disk of an incremental optical
encoder to measure displacements of 1.5? Resolution =360 /N =1.5 N
= 240 windows
Slide 19
Encoder Resolution Incremental Optical Encoder X4 Resolution =
360/4N N = number of windows (slits or lines) on the code disk
Todays standard We may count rising and falling edges in both
channels signals
Slide 20
(Sabri Centinkunt, page 236) Example: Consider an incremental
encoder that produces 2500-pulses/revolution. Assume that the photo
detectors in the decoder circuit can handle signals up to 1 MHz
frequency. Determine the maximum shaft speed (RPM) the encoder and
decoder circuit can handle.
Slide 21
Absolute Encoder Incremental Single channel Incremental Dual
channel Incremental with Z index Applications
What is a Laser Interferometer ? Laser- single frequency light
wave Interferometry- Family of techniques where waves are super
imposed in order to extract information about the waves Uses the
interference patterns from lasers to produce high precision
measurements
Slide 26
Physics Background Waves Light is an Electrometric wave and
therefore has wave properties.
http://en.wikipedia.org/wiki/File:Light-wave.svg
Slide 27
Physics Background Diffraction and Interference Diffraction
Light spreads after passing a narrow point Interference
superposition of two waves to form new wave with different
amplitude Constructive or Destructive
http://en.wikipedia.org/wiki/File:Doubleslit3Dspectrum.gif
Slide 28
Types of Laser Interferometers Homodyne Homo (same) + dyne
(power) Uses a single frequency to obtain measurements Heterodyne
Hetero (different) + dyne (power) Uses two different (but close)
frequencies to obtain measurements.
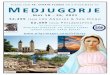
Homodyne Interferometer Analysis Photograph of the interference
fringes produced by a Michelson interferometer. is the wavelength
of the light L ref is the distance to the reference mirror L is the
distance to the moveable mirror n is the number of fringes
Physics Background Doppler Effect Point creating a wave and
movement Wave ahead of point has higher frequency Wave behind point
has lower frequency Frequency change corresponds to velocity
http://en.wikipedia.org/wiki/File:Dopplereffectsourcemovingrig
htatmach0.7.gif
Slide 33
Physics Background Beat Frequency Rate of constructive and
destructive interference
Slide 34
Heterodyne Interferometer Produces two close but not equal
frequencies (Creating a Beat Frequency) Doppler effect from moving
reflector shifts the frequency proportional to the velocity
Slide 35
Heterodyne / Homodyne Interferometer Comparison Comparing with
a Homodyne Interferometer Can determine movement direction (but
limited range) More useful when direction of movement is
important
Slide 36
Heterodyne / Homodyne Interferometer Comparison Homodyne Smooth
surfaces only Heterodyne Can be used for Distance to rough surfaces
Surface roughness measurements
Slide 37
Resolution XL-80 Laser Measurement System Xiaoyu Ding
Slide 38
References http://www.aerotech.com/products/engref/intexe.html
http://www.renishaw.com/en/interferometry-explained--7854
http://en.wikipedia.org/wiki/Michelson_interferometer
http://en.wikipedia.org/wiki/Interferometry
http://en.wikipedia.org/wiki/Doppler_effect
www.ljmu.ac.uk/GERI/GERI_Docs/interferometry_presentation(1).ppt
http://www.olympus-controls.com/documents/GEN-NEW-0117.pdf
http://www.lambdasys.com/product/LEOI-20.htm
http://www.intechopen.com/books/advances-in-solid-state-lasers-
development-and-applications/precision-dimensional-metrology-based-on-a-
femtosecond-pulse-laser
http://www.intechopen.com/books/advances-in-solid-state-lasers-
development-and-applications/precision-dimensional-metrology-based-on-a-
femtosecond-pulse-laser http://en.wikipedia.org/wiki/Fringe_shift
http://www.gitam.edu/eresource/Engg_Phys/semester_1/optics/intro_polari.
htm
http://www.gitam.edu/eresource/Engg_Phys/semester_1/optics/intro_polari.
htm A. F. Fercher, H. Z. Hu, and U. Vry, Rough surface
interferometry with a two- wavelength heterodyne speckle
interferometer, Applied Optics
Slide 39
Linear Variable Differential Transformer (LVDT) Brian
OSaben
Slide 40
Outline What is a LVDT? How LVDTs Works LVDT Properties LVDT
Support Electronics Types of LVDTs LVDT Applications
Slide 41
What is a LVDT? Linear variable differential transformer
Electromechanical transducer measuring linear displacement
Slide 42
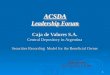
What is a LVDT? Primary coil Energized with constant A/C Two
identical secondary coils Symmetrically distributed Connected in
opposition Ferromagnetic core
Slide 43
How LVDT works If core is centered between S1 and S2 Equal flux
from each secondary coil Voltage E1 = E2
Slide 44
How LVDT works If core is closer to S1 Greater flux at S1
Voltage E1 increases, Voltage E2 decreases E out =E1 E2
Slide 45
How LVDT works If core is closer to S2 Greater flux at S2
Voltage E2 increases, Voltage E1 decreases E out =E2 E1
Slide 46
How LVDT works
Slide 47
LVDT properties Friction-free operation Unlimited mechanical
life Infinite resolution Separable coil and core Environmentally
robust Fast dynamic response Absolute output
Slide 48
LVDT support electronics LVDT signal conditioning equipment
Supply excitation power for the LVDT Typically 3 Vrms at 3 kHz
Convert low level A/C output to high level DC signals Gives
directional information based on phase shift
Slide 49
Types of LVDTs DC LVDT Signal conditioning equipment built in
Pre-calibrated analog and/or digital output Lower overall system
cost AC LVDT Wide operating environments Shock and vibration
Temperature Smaller package size
Slide 50
Types of LVDTs Separate core Core is completely separable from
the transducer body Well-suited for short-range (1 to 50mm), high
speed applications (high-frequency vibration) Guided core Core is
restrained and guided by a low- friction assembly Both static and
dynamic applications working range (up to 500mm) Spring-loaded Core
is restrained and guided by a low- friction assembly Internal
spring to continuously push the core to its fullest possible
extension Best suited for static or slow-moving applications Lower
range than guided core(10 to 70mm)
Slide 51
LVDT applications Industrial gaging systems Electronic dial
indicators Weighing systems Crankshaft balancer Final product
inspection (checking dimensions) Octane analyzer (provides
displacement feedback for Waukesha engine) Valve position
sensing
Slide 52
References http://www.macrosensors.com/lvdt_tutorial.html
http://www.rdpe.com/displacement/lvdt/lvdt-principles.htm
http://www.directindustry.com/industrial-manufacturer/lvdt-
73930.html
http://www.directindustry.com/industrial-manufacturer/lvdt-
73930.html
http://macrosensors.com/blog/view-entry/Why-Use-an-AC-LVDT-
versus-a-DC-LVDT-Linear-Positio/31/
http://macrosensors.com/blog/view-entry/Why-Use-an-AC-LVDT-
versus-a-DC-LVDT-Linear-Positio/31/ http://www.meas-
spec.com/downloads/LVDT_Selection,_Handling_and_Installation_
Guidelines.pdf http://www.meas-
spec.com/downloads/LVDT_Selection,_Handling_and_Installation_
Guidelines.pdf
http://en.wikipedia.org/wiki/Linear_variable_differential_transform
er
http://en.wikipedia.org/wiki/Linear_variable_differential_transform
er http://www.transtekinc.com/support/applications/LVDT-
applications.html
http://www.transtekinc.com/support/applications/LVDT-
applications.html Lei Yangs student lecture