-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
1/7
Sensorless Control of Induction Motor Using NaturalVariables
with Loss Minimization
Olorunfemi Ojo and Ga nDongDepartment of Electrical and Computer
EngineerindCenter for Electric PowerElectric Machine and Power
Electronics LaboratoryTennessee Technological University,
Cookeville, T N 38505Phone : (931)-372-3869, Fax : (931)-372-3436,
E-mail :oio(@tntech.edu
Absiruct - This paper presents an approach to sensor-less speed
control an efficiency-optimized induction motorusing natural and
reference frame independent quantitiesas state variables - the
square of the magnitude of rotorflux linkage, active and reactive
torques and rotor speed.Utilization of the nonlinear geometric
control methodologyof input-output linearization with decoupling
permits theimplementation of the control in the stationary
referenceframe. This approach eliminates the use of
synchronousreference transformation and flux alignment required
inclassical vector control schemes. The proposed sensor-lessspeed
method uses both the rotor voItage equations, whichare shown to
provide a good rotor speed estimation. Theefficiency of the
induction motor is realized by choosingthe optimal reference rotor
flux linkage using an efficiencyoptimizing formulation. 'The
proposed scheme and theiradvantages are demonstrated both by
computersimulations and som e experimental results for motor
speedcontrol.
I, INTRODUCTIONInduction machines have been widely used in the
industry,consuming a significant percentage of electric power
generation. Much research work has been done to improvetheir
design and enhance steady-state operation whileefficiency
improvement of motor drives has been an area ofactive resear ch
within the last twenty five years occasioned bythe increasing need
to better utilize electric power. Theefficiency can be improved
through an appropriate control ofmotor excitation to reduce various
kinds of losses includingthe copper and core losses, which are the
dominant electricallosses, Copper loss reduces with decreasing
stator and rotorcurrents while the core loss essentially increases
withincreasing air-gap flux density. A study of the copper and
coteloss components reveals that their trends conflict - when
thecore loss increases, the copper loss tends to decrease for
agiven torque. However, there is an air-gap flux density atwhich
the sum of copper a nd core losses is minimized. Hence,electrical
loss minimization process ultimately comes down tothe selection of
the appropriate air-gap flux density when themotor is operating at
a particular speed or torque. Since theair-gap flux density must be
variable when the load ischanging, control schemes in which the
(rotor, air-gap) fluxlinkage is constant will yield sub-optimal
efficiency operationespecially when the load is light.
The vector control of induction machines emerges with
thedevelopment of modem power electronics. The
fast-switchingdevices and the DSP provide the convenient ways to
realizethe complex control scheme through voltage source
inverters,There has been some work done on the
efficiencyoptimization of high performance drives. The classical
vectorcontrol algorithms need some modifications to include
coreloss effect and in the determination of the reference currents
orflux linkages, without which the decoupling between the fluxand
torque current components are compromised [ I ] . A mostrecent
proposal in a series of papers dealing with the speed-sensor-less
vector control of induction machines, operating athigh efficiency
in which core loss is accounted for, showswith simulation and
experimental results, that in th e sensor-less mode o f operation,
high agility and high efficiency arefeasible 123. Recently, papers
have been presented dealingwith loss minimization and high
performance speed (torque)control of synchronous and permanent
magnet machines usingnon-linear control schemes based on feedback
linearizationand decoupling methods using motor models in which
coreloss is represented with core loss resistances [3-51.From the
application point of view, quantities such as rotorflux linkage,
torque, active and reactive powers etc are whatcan be easily
related to rather than reference frametransformed variables. These
quantities are all naturalvariables which are independent of any
referen ce frame. Usingthese quantities as the control variables
leads to the scalarcontrol and they are directly useable for the
loss minimizationcontrol scheme since the power and losses are also
scalarquantities.A speed sensor-less control algorithm is used to
eliminatethe speed sensor and or encoder. This hardware
eliminationresults in total cost reduction of the drive system. It
isbasically the algorithm of speed estimation that infers
themeasurement required from other more easily
availablemeasurements including motor voltages and currents.
Thetechniques that have been developed so far can be classifiedinto
three categories: using motor back EM F for the flux andspeed
estimation, detecting rotor slot harmonics in the statorcurrents
and detecting the saliency in the rotor 16-81, Since thefluxes have
to be estimated fo r the calculation of those naturalvariables, the
speed estimation using the fluxes and rotorvoltage equations in the
stationary reference frame becomesexplicit, which belongs to the
first category of speedestimation technique. Either one of the two
rotor voltage
0-7803-8975-1~05/$20.002005 IEEE. 45 I
mailto:joio(@tntech.edumailto:joio(@tntech.edumailto:joio(@tntech.edu
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
2/7
equations can be used to calculate the rotor speed
information.However, the calculation using sinusoidal rotor fluxes
causesthe problem of division by zero and induced
possibleoscillations. These problems can be solved with a high
degreeof accuracy of rotor speed estimation when both
rotorequations are used.There are two main approaches presented in
the literaturefor the loss minimization of electric machines: -
model basedand on-line power search optimization methods. In the
modelbased scheme, the loss is defined in terms of measuredmachine
parameters which is minimized using what is calledthe loss model
controllers [9-111. The on-line power searchoptimization method
uses the measured input power to themotor and perturbs control
variables until the measured poweris minimized for a particular
operating condition [12-131. Itwould appear with good justification
that these efficiencyimprovement schemes find their greatest
utility under steadyand quasi-steady-state operating conditions.The
organization of the paper is as following. In Section 11the
induction motor model with loss consideration isintroduced while in
Sections 111 an d IV the loss minimizationscheme is laid out. The
speed estimation algorithm is set forthin Section V while
simulation and experimental results arepresented in Section VI.
II . INDUCTiON MOTOR M ODE L WITH LOSS CONSIDERATION
0.20- .15 -E.EJ 0.10 -
0.05 -he q-d equivalent circuit for the induction machine
isshown in Fig. 1in which the core loss is represented by a
coreloss resistance.
r,
0 I 1 0(a) q-axisT F Y *v* L(b) d-axisFig. 1 . Equivalent q-d
axis circuit of the induction motor.
The voltage equations for the induction machine in thearbitrary
reference frame speed w are :
Define L = L -& and k = 1 + 5 , the stator voltageequations
can be expressed in terms of 1' I ; and l g r , A d asfollows.
a L, r cqr
(2)Th e model equations contain the mutual inductance and
thecore loss resistance which are changing with the stator
fluxlinkage. These changes are accounted for in both
computersimulations and experimental implementation of
thecontrollers by updating them as the stator flux linkage
varies.
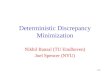
Figure 2 illustrates these parameter changes for a 1 hpmachine,
in which the measured mutual inductance and coreresistance are
plotted as the function of the stator flux linkage.
0.W 4 I I I 1U a i 0.2 0 .3 0.4
stai.x nLuW)(a)
1000800
E 6000 40 0
Izoo
00 0.1 0.2 0. 3 0.4
Stitwflux (Wb)(b)Fig. 2. Measured parameters of the induction
machine as afunction of stator flux linkage magnitude. (a)
Mutualinductance, @) core loss resistance.
111. NATURAL VARIABLEMODEL A N D LOSS MINIMIZATIONThe variables
of the natural variable model of the inductionmachine chosen ate
the developed electromagnetic torque q ,
the developed reactive torque T , , the rotor speed U , and
thesquare of the magnitude of the rotor flux linkage Am .
Thevariables are the same in all transformation reference
framesThey are defined in terms of the axis currents and flux
linkageas :
452
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
3/7
IV . FORMULATION OFCONTROL SCHEMEThe total loss minimization is
achieved through appropriatecommand of the q-d axis machine
voltages by closed-loopcontrollers using a voltage source inverter.
Since the model ofthe machine is nonlinear and coupled, the
principles ofnonlinear control of the input-output linearization
with
decoupling are used to rem uve the nonlinearity and
decoupledterms thereby enabling classical linear system
controlmethodology to be used to determine both the constant
gainparameters and the structure of the controllers. This is
possiblesince the input-output linearization and decoupling
strategyensures linear relationship between the input control
variablesand the controlled variables with each output-input
pairdecoupled from each other.Th e control scheme can be derived
through differentiatingthe control variables. The command for the
flux is given fromthe loss minimization function.
The losses consisting of copper and core losses expressed
interms of natural variables are given as:
(4)
The total electrical loss is to be minimized when the motori s
subject to the operating load torque condition, re= T ~ ' ,Wecan
choose either or T, as the other control variable toform the loss
minimization function y ,
Equation (5) is determined from (4).
(7 )Under steady-state operation, the total loss is
minimizedwhen :
'.(a' +T 2 )2k 2
The quantities m, an d m, are calculated using the outputsof the
controllers for r, an d Tr. Then the voltages commandsare
calculated by solving (13).
Popular PI controllers are applied for the control of;2,,Te, and
U, , Their corresponding transfer functions arederived as
follows.
453
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
4/7
Fig. 3 . Control scheme of induction motor with electrical loss
minimization strategy.
The controller parameters are determined fiom the
transferfimctions by tuning the denominators to be
Butterworthpolynomial compliant, which is to optimize the
closed-loopeigen-values to be uniformly located in the left half
plane onthe circle of the resonant frequency. Buttenvorth
polynomialfor a transfer function with a second order polynomial is
givenby
Comparing the coefficients of the denominators of the
transferfunctions obtained from (15) and (16) gives the
controllers'gains for a chosen resonant frequency Q.The seIection
of the,resonant frequency is such as to ensure the
closed-looptransfer functions of the controIIed variables have
minimum-phase characteristics [13]. The controller structure for
themotor speed control is shown in Fig. 3.V. SPEED ESTIMATION
The rotor voltage equations are used in the proposed
speedsensor-less approach, making the estimation method part ofthe
category using the motor back EMF. The complex-formrotor voltage eq
uations in the stationary reference frame are :0 = rJ, , +PA, + N r
J q d r (16)Eliminating the rotor curre& using (17) and
resolving thevoltage equ ations into real and imaginary parts,
the
expressions for the estimated speeds ate given in (1 8).I 1=-
(Aq&- J q d 9 14+
The rotor flux are calculated from the stator flux linkagesand
stator currents using (19)
The stator flux linkages are estimated by integrating thestator
back-EMF using a low pass filter and a compensationscheme to
eliminate magnitude and phase errors in (20) .
In (20) a is the cut-off frequency. Extensive simulation
resultsshow that using either equation in (18) results significant
errorin the speed estimation. A better estimation results
areobtained using both equations in (18) as in (2 1).U, =-d
Jqrli+yzAir2
VI. SlMULATlON AND EXPERIMENTAL RESULTSFigure 4 gives the
no-load starting transient of anexperimental 1 hp induction machine
whose parameters areshown in Fig. 2 and the Appendix. The reference
speed isramped from zero to 300 radlsec while seeking to
minimizethe total electrical loss. The simulation results show that
therotor flux linkage quickly builds up and maintains an almost
454
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
5/7
constant rated value and becomes small at steady-state. Thetotal
loss reduces as the developed torque becomes zero.In Fig. 5, the
speed is maintained at 300 radsec, but theload torque is changing.
As expected, the rotor flux respondsto the changing load demand
resulting in the minimization ofthe losses. As the load demand
decreases, the rotor flux alsodecreases resulting in a lower loss.
In Fig. 6, the rotor speed ischanged with time and it is seen that
both the rotor fluxlinkage as the loss seeks the minimum level. In
these figures,the square of the rated flux linkage is about 0. 2
Wb'.
I,, , .*,,,,-: 50-
Fig. 4. Speed regulation and loss minimization for motorstarting
from zero speed to 300 rad sec. (a) developed torque,@) actual and
command rotor speed, (c) square of rotor fluxlinkage, (d) total
electric loss.s - , - ? - - - - V I -- --
.....t'- -4 -
\L-1 1 2 U L . U I 5 2 a . I I s r L
[\( c ) . n1 -I "
.... ~ . . . . . . . . . . . . . . . . ~ ....... ;... .... +-
,_AhL
1 -- i' I- - - 7 TAdl 8 %I ' I4 4 1 U il A : $2 z1 *I S I IFig.
5. Speed regulation and loss minimization for changingload torque
(a) developed torque, (b) actual and commandrotor speed, (c) square
of rotor flux linkage, (d) total electricloss.
Figures 4-6 demonstrate the possibilities that this
controlscheme presents , with changing load or reference
speedcommands an appropriate rotor flux linkage is determined
tominimize the electnc loss while simultaneously giving
highperformance speed controlThe proposed speed estimation method
has also beensimulated in Fig. 7 Figure 7(a) shows the steady-state
speedof reference and actual speeds after the reference speed
isramped from zero to 150 rad/sec, in which the steady-stateerror
IS very small Figure 7(b) shows the speed response for aconstant
flux reference when the load is under step change. It1s seen that
the estimated speed is almost identical to the
I@.=dl
Ia 30 12 11 I S1 4 L a g l l
Fig. 6. Speed regulation and loss minimization for changingrotor
speed. (a) developed torque, (b) actual and commandrotor speed, (c)
square of rotor flux linkage, (d) total electricloss.Actual speed.
This simulation result verifies the effectivenessof the proposed
sensor-less approach. Figure 8 gives thesimulation results when
only one of the rotor voltageequations is used. Compared with the
proposed method, theoscillation in the estimated speed is
significant and it causesproblems when the estimated speed is used
as the actual speedfeedback.
I . . . . . . . i. .- 8I'5 0 6 ; 1'5 2 ; 1 I; ; 4s it
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
6/7
i . - - 1_ .
IL
Fig. 8. Reference and estimated speed at steady-state usingone
of the rotor voltage equations in (18)The speed sensor-less method
has been implemented withthe proposed control scheme. Figure 9
below showsexperimentally the no-load speed response of the motor
whenthe speed is changing. The estimated speed and actualmeasured
speeds track the reference speed very well. Then themotor is driven
to 600 rpm using the same speed estimationmethod. From the starting
condition to steady-state speed, therotor flux is set at rated
condition after which the lassminimization algorithm is applied,
which is shown in Fig. 10.The reference speed tracks the actual
speed closely and the
TekPrevu I t I , , ,T " "
. . . . .. . .rr.. . . : . . . . . . . . . +. . . . . : . . . .
. . .1 : . : . t-. .. . :. + .. : . . . : . : . . . . . . + . . . .
. . . . . . . j .J.: ..(b) 300 - 600rpmFig. 9. Experimental results
for speed sensor-less control.From Top : (1) Reference speed, (2)
measured speed, (3 )estimated speed.
Fig. 10 . Speed regulation from zero to 600 rpm. From top: ( I
)command rotor speed, (2) actual rotor speed, (3) square ofrotor
flux linkage, (4) phase 'a' current
Fig. 1 Speed regulation ( 300 - 600 pm ) showing rotor
fluxvanation. From top ' (1) Reference speed, (2) Estimatedspeed,
(3) Rotor flux linkage.
magnitude square of flux linkage reduces after the
lossminimization algorithm kicks in. There is however an
initialdivergence between the actual and estimated speed at
thestarting condition when the rotor flux linkage is kept
constant.Finally, figure 11 displays the changing rotor flux
linkageprofile for the loaded motor under changing rotor
speedcondition. This graph succinctly demonstrates how theoptimum
rotor flux linkage command is changing whichshould consequently
affect the loss in the machine -improving overall motor
efficiency.VII. CONCLUSIONS
The approach of induction motor speed sensor-less controlusing
natural and reference Frame independent quantities asstate
variables is presented. The nonlinear geometric controlmethodology
of input-output linearization with decoupling isused for the
implementation of the control in the stationary
456
-
8/14/2019 Sensor Less Control of IM Using Natural Variables With
Loss Minimization
7/7
reference fiame. This technique eliminates the need
ofsynchronous reference transformation and flux alignmentrequired
in classical vector control schemes. Both rotorvoltage equations
are used for the estimation of rotor speed toachieve the speed
sensor-less control scheme. Simulation andsome experimental results
show that the efficiency ofinduction motor drives can be optimized
by choosing theoptimal rotor flux linkage reference from the
efficiencyoptimizing formulation while simultaneously achieving
rotorspeed sensor-less control. The proposed loss
minimizing,sensor-less speed regulation scheme and their advantages
aredemonstrated both by computer simulations and someexperimental
results.
REFERENCES[ l ] E. Levi, Impact of iron loss on the behavior of
vectorcontroHed induction machines, IEEE Trans. on Indus
tyApplications, vol. IA-31, no. 6, pp. 1287-1296,November/December
1995.[2J K. Matsuse, S. Tanguchi, T. Yoshizumi and K. Namiki,
Aspeed-sensor-less vector control of induction motoroperating at
high efficiency taking core loss into account,
IEEE Trans. on Industry Applicafions, vol. IA-37, no , 2,pp.
548- 558, MarcWApril2001.[ 3 ]D. Grenier, L. A. Dessaint, 0
.Akhrif, Y . Bonnassieux andB. Le Pioufle, Experimental nonlinear
control of apermanent magnet synchronous motor using saliency,IEEE
Trans. on Industrial Elecfronics, vol. 44, no. 10, pp.680-697,
October 1997.[4] H. Lee, S.Kang and S . Sul, Efficiency-optimized
directtorque control of synchronous reluctance motor usingfeedback
linearization, ZEEE Trans. on IndustrialElectronics,vol. 46, no .
1, pp. 192 - 198, February 1999.
[5] 0. Ojo, F. Osaloni and Z . Wu, A control strategy foroptimum
efficiency operation of high performance interiorpermanent magnet
motor drives, Conference Record o jthe 2003 IEEE
industvyApplications Conference, pp. 604-610, October 2003.[6] M-H
Shin, D-S Hynn, S-B Cho and S-Y Choe, Animproved stator flux
estimation for speed sensorless statorflux orientation control of
induction motors, IEEE Trans.on Power Elecfronics, vol. 15, no. 2,
pp. 312-317, March2000.[7] M. W. Degner and R. D. orenz, Position
estimation ininduction machines utilizing rotor bar slot harmonics
andcarrier frequency signal injection, ZEEE Trans. on
Industry Applications, vol. 36, No. 3, pp. 736-142,May/June
2000.[8] M. J. Corly and R. D. orenz, Rotor position and
velocityestimation for a salient-pole permanent magnetsynchronous
machine at standstill and high speeds, IEEETrans. on Zndustvy
Applications, vol. 34, No. 4, pp . 784-789, July/August 1998.[9] A
. Kusko and D.Galler, Control means for minimizationof losses in ac
and dc motor drives, ZEEE Trans. onIndusfry Applications, vol.
IA-19, pp. 561-570,JulyIAugust 1983.[ l o ] D. . Kirschen, D.W.
Novotny and W. Suwanwissot,Minimizing induction motor losses by
excitation controlin variable frequency drives, IEEE Trans. on
IndustrySeptemberiOctober 1984.[ l l ] C. Mademlis, J. Xypteras and
N.Margaris, Lossminimization in surface permanent-magnet
synchronousmotor drives, IEEE Trans. on Industry Application s,
vol.IA-47, pp . 115 -122, February 2000.[121 T. Matsuo, A.
El-Antably an d T. A. Lipo, A new controlstrategy for optimum
efficiency operation of asynchronous reluctance motor, IEEE Trans.
on IndustryApplications, vol. 33, no. 5, pp.
1146-1153,SeptembedOctober 1997.[13] ff.G. Kim, S. K. Sul and N. H.
Park, Optimal efficiencydrive of a current source inverter fed
induction motor byflux control, IEEE Trans. on I n du s f v
Applicarions, vol.20, no. 6, pp.1453-1459, NovemberDecember
1984.[141 B. Friedland, Control System Design, An Introductionto
State-Space Methods, McGraw-Hill, New York,1986.
[15] Kazmierkowski M.P, Krishnan R, BIaabjerg F, Controlin Power
Electronics: Selected Problems, AcademicPress, Boston, 2002.
AppZica t i~~~ ,vol. IA-20, pp. 1244- 1250,
APPENDIXThe parameters of the 230V, 4-pole, 1 hp induction
machineused for this experiment are:
Stator resistance = 1.98OhmsStator leakage inductance = 0.0091
HMagnetizing inductance = 0.1986 H - See Figure 2(a)Core loss
resistance = 850 Ohms - See Figure 2(b)Rotor per phase resistance =
1.85 OhmsRotor per phase leakage inductance = 0.0091 HThe moment of
inertia = 0.089 kg-m2
457