Embed Size (px)
Citation preview

This article was downloaded by: [Instituto Nacional De Pasquisas], [Luiz A.T. Machado]On: 23 January 2014, At: 08:23Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registeredoffice: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
International Journal of RemoteSensingPublication details, including instructions for authors andsubscription information:http://www.tandfonline.com/loi/tres20
Inner convective system cloud-top windestimation using multichannel infraredsatellite imagesR.G. Negria, L.A.T. Machadoa & R. Bordeb
a Centre for Weather Forecasting and Climate Research, NationalInstitute of Space Research (INPE/CPTEC), Rodovia PresidenteDutra km 40, Cachoeira Paulista, SP, Brazilb European Organisation for the Exploitation of MeteorologicalSatellites (EUMETSAT), Darmstadt, GermanyPublished online: 20 Jan 2014.
To cite this article: R.G. Negri, L.A.T. Machado & R. Borde (2014) Inner convective system cloud-top wind estimation using multichannel infrared satellite images, International Journal of RemoteSensing, 35:2, 651-670
To link to this article: http://dx.doi.org/10.1080/01431161.2013.871391
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the“Content”) contained in the publications on our platform. However, Taylor & Francis,our agents, and our licensors make no representations or warranties whatsoever as tothe accuracy, completeness, or suitability for any purpose of the Content. Any opinionsand views expressed in this publication are the opinions and views of the authors,and are not the views of or endorsed by Taylor & Francis. The accuracy of the Contentshould not be relied upon and should be independently verified with primary sourcesof information. Taylor and Francis shall not be liable for any losses, actions, claims,proceedings, demands, costs, expenses, damages, and other liabilities whatsoever orhowsoever caused arising directly or indirectly in connection with, in relation to or arisingout of the use of the Content.
This article may be used for research, teaching, and private study purposes. Anysubstantial or systematic reproduction, redistribution, reselling, loan, sub-licensing,systematic supply, or distribution in any form to anyone is expressly forbidden. Terms &

Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

Inner convective system cloud-top wind estimation using multichannelinfrared satellite images
R.G. Negria*, L.A.T. Machadoa, and R. Bordeb
aCentre for Weather Forecasting and Climate Research, National Institute of Space Research(INPE/CPTEC), Rodovia Presidente Dutra km 40, Cachoeira Paulista, SP, Brazil; bEuropean
Organisation for the Exploitation of Meteorological Satellites (EUMETSAT), Darmstadt, Germany
(Received 31 May 2012; accepted 1 November 2013)
Knowledge of deep convective system cloud processes and dynamic structures is a keyfeature in climate change and nowcasting. However, the horizontal inner structures atthe cloud tops of deep convective systems are not well understood due to lack ofmeasurements and the complex processes linked to dynamics and thermodynamics.This study describes a new technique to extract inner cloud-top dynamics usingbrightness temperature differences. This new information could help clarify ring andU or V shape structures in deep convection and be potentially useful in nowcastingapplications. Indeed, the use of high-resolution numerical weather prediction (NWP)models, which now include explicit microphysical processes, requires data assimilationat very high resolution as well. A standard atmospheric motion vector tracking algo-rithm was applied to a pair of images composed of combinations of SpinningEnhanced Visible and Infra-red Imager (SEVIRI) channels. Several ranges of channeldifferences were used in the tracking process, such intervals being expected tocorrespond to specific cloud-top microphysics structures. Various consistent flows ofmotion vectors with different speeds and/or directions were extracted at the samelocation depending on the channel difference intervals used. These differences inspeed/direction can illustrate local wind shear situations, or correspond to expansionor dissipation of cloud regions that contain high concentrations of specific kinds of icecrystals or droplets. The results from this technique were compared to models andancillary data to advance our discussion and inter-comparisons. Also, the techniqueproposed here was evaluated using SEVIRI images simulated by the radiative transfermodel RTTOV with input data from the UK Met Office Unified Model. A futureapplication of the new data is exemplified by showing the relationship between winddivergence calculated from the new atmospheric motion vector and convective cloudtop intensification.
1. Introduction
Good knowledge of deep convective system dynamics, thermodynamics, and cloud pro-cesses is a key feature in nowcasting and high space/time weather forecast model resolution.However, the inner flows at the top of deep convection towers are not well understood dueto several uncertainties linked to the dynamics (Cotton and Anthes 1989). Understandingand retrieving the dynamics of mesoscale convective systems could be important inimproving parameterization at these scales or for monitoring severe storms. The patternsof winds associated with mesoscale convective systems are an important feature in improv-ing short-range weather forecasting within short time scales. This kind of weather system
*Corresponding author. Email: renato.galante.cptec.inpe.br
International Journal of Remote Sensing, 2014Vol. 35, No. 2, 651–670, http://dx.doi.org/10.1080/01431161.2013.871391
© 2014 Taylor & Francis
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

produces high amounts of precipitation, which contributes a large amount to the Earth’stotal precipitation, and therefore such systems are important for climate studies. Today, theestimation of winds using geostationary satellite images is well established, but it is mainlydone operationally to estimate synoptic-scale winds. Studies on how to improve spatialcoverage and detect mesoscale flows more precisely are important because models runoperationally using high spatial resolution. For instance, the methodology presented hereaims to detect wind at a horizontal scale of around 25 km and at 15 min intervals. TheCentre for Weather Forecasting and Climate Research, National Institute of Space Research(CPTEC/INPE) operational scheme estimates wind at a horizontal scale of around 100 km,which is related to a mean flow from 30 min to 1 h.
During recent decades, many studies have been done to detect ice, water, andmixed-phase cloud situations using satellite- and ground-based observations(Pilewskie and Twomey 1987; Ackerman et al. 1990; Strabala, Ackerman, andMenzelw 1994; Chylek and Borel 2004; Chylek et al. 2006). These methods can bedivided into three groups. The first uses only thermal infrared radiances, the seconduses visible and near-infrared reflectances, and the third combines visible, near-infra-red, and thermal radiances.
Thermal infrared-based methods have the capability to retrieve cloud phase informationduring both day and night, but visible and near-infrared methods can only be performedduring daylight hours. Arking and Childs (1985) obtained cloud thermodynamic phaseinformation using radiances from channels 3.7 and 10.8 µm of the Advanced Very HighResolution Radiometer (AVHRR) on board a National Oceanic and AtmosphericAdministration (NOAA) satellite. Strabala, Ackerman, and Menzelw (1994) developed atri-spectral cloud-phase algorithm combining the 8, 11, and 12 μm bands. This method isbased on a dispersion diagram of the brightness temperature differences 8–11 μm versus11–12 μm. Their results showed the potential to identify the thermodynamic cloud phase(ice or water clouds and mixed) in many situations. Baum et al. (2000) improved the tri-spectral thermal infrared-based method proposed by Strabala, Ackerman, and Menzelw(1994) by the addition of reflectances of 0.63, 1.63, and 1.9 µm spectral bands aimed atincreasing the accuracy of thin cirrus cloud retrievals. Chylek and Borel (2004) proposed atechnique based on the ratio between two channels, one in the visible region around 0.8 µmand the other in the near infrared around 1.6 µm, to classify mixed-phase clouds. Chyleket al. (2006) compared near-infrared and thermal-infrared cloud thermodynamics phasedetection techniques. The near-infrared technique was based on the ratio between visibleand near-infrared bands, while the thermal infrared technique uses the brightness tempera-ture difference (BTD) between two thermal infrared bands. These results suggest that BTDalone is suitable for cloud phase detection, it being problematic only over surface areascovered by ice or snow. Wolters, Roebeling, and Feijt (2008) investigated the suitability ofthree multi-spectral cloud phase satellite-based retrieval methods using the SpinningEnhanced Visible and Infra-red Imager (SEVIRI) radiometer on board the Meteosat 8satellite. The authors compared the retrievals (a thermal infrared method based on the8–11 µm bands, an International Satellite Cloud Climatology Project (ISCCP)-like methodbased on infrared brightness temperature threshold, and other methods based on comparingiteratively observed satellite reflectances at 0.6 and 1.6 µm with look-up tables of reflec-tances simulated by a radiative transfer model with ground-based cloud-phase determinationmethods from cloud radar and lidar data, assessing the quality of instantaneous cloud-phaseretrieval, monthly average water/ice clouds occurrence and diurnal cycles of cloud-phase.They found that the SEVIRI 8.7–10.8 µm BTD method reproduced the diurnal cycle of iceand water better than the other channel combination retrieval methods.
652 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

Other methods based on polar satellites or using other electromagnetic bands, such asmicrowaves (e.g. Tropical Rainfall Measuring Mission (TRMM)) play an important role incloud classification. However, these methods are not suitable for the proposed applicationdiscussed here, because a time resolution higher than 15 min is necessary, which is possibleonly with geostationary satellites.
Satellite-derived winds, also known as atmospheric motion vectors (AMVs), are pro-duced from all operational geostationary satellites and have been studied since the 1960s(Fujita 1968; Hubert andWhitney 1971). For a better description of the history and generationprocess of satellite AMVs, seeMenzel (2001). The AMVis a good way to retrieve wind in thesynoptic scale, it being widely used in numerical weather prediction (NWP) models asatmospheric initial state parameters. Bedka and Mecikalski (2005) showed the possibilityof identifying motions associated with and induced by convective clouds (scales from 2 to200 km where ageostrophic flow becomes important) using a modified satellite wind algo-rithm to detect mesoscale winds. The authors called these new AMVs mesoscale atmosphericmotion vectors (MAMVs).
When cloud-top microphysical components, ice crystals and water droplets, can beidentified in a geostationary satellite image sequence, the different areas of the cloud topwhere any of these components are predominant can be tracked. Tracking these structures,information about their horizontal movements and also, indirectly, some informationabout the vertical flows can be estimated.
Following this assumption, the present study shows the potential of identifying andtracking areas dominated by ice, water, or a mixed phase in deep convective cloud topsusing SEVIRI channel combinations. Therefore, some information about the dynamics ofthe inner structures in mesoscale cloud-top systems can be assessed, as well as improve-ment of the spatial resolution of the winds fields. Section 2 gives a full description of themesoscale cloud-top wind detection technique. Section 3 presents a comparison betweenwinds extracted using this technique and the Centre for Medium-Range Weather Forecasts(ECMWF) high-resolution model winds, as well as using synthetic SEVIRI images. Thissection also discusses the relationship between the high-level wind divergence calculatedfrom this new wind technique and the time evolution of the brightness temperatures.Conclusions are presented in Section 4.
2. SEVIRI brightness temperature difference and the tracking scheme
The new technique described here aims to detect horizontal movements of deep convectioncloud-tops at a minimum of 24 km horizontal scale (the horizontal scale depends on the targetwindow used for the wind estimate). This technique assumes that the combinations ofinfrared pairs of SEVIRI channels allow the isolation of specific cloud components (dropletsof different sizes or ice crystals with different shapes and sizes and mixed-phase cloud-topregions) and then the tracking of the displacement of these structures. The difference betweentwo SEVIRI infrared channels, the brightness temperature difference (BTD), gives us a newarray of data where each pixel represents a specific cloud component. In principle, any pair ofspectral bands that have very different imaginary refraction indexes for ice and water can beused to identify ice and water in a cloud. The satellite-based cloud particle distinction is basedon the difference in the spectral reflectivity of ice and water (Chylek and Borel 2004). Theobjective of the BTD technique is to find a suitable spectral region in the thermal infraredwhere water and ice or particle size have significant differences in emissivity (Chylek et al.2006). Indeed, emissivity of any material is related to its absorbance, which is linked to theimaginary part of the refractive index (Hale and Query 1973; Warren 1984; Gosse, Labrie,
International Journal of Remote Sensing 653
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

and Chylek 1995). As this study uses SEVIRI measurements, it was necessary to select thebest combinations from all available SEVIRI infrared channels (3.9, 6.2, 7.3, 8.7, 9.7, 10.8,12, and 13.4 µm). The infrared image spatial resolution is 3 km in the sub-satellite point.Hereafter, we define AMV obtained by the BTD technique as BTD-AMV, and thoseestimated using any SEVIRI channel alone as SEVIRI-AMV.
The channel combination 3.9–10.8 µm was also evaluated but the BTD-AMV amountwas null or too small to be analysed. The noise due to sensor saturation makes it difficult toidentify and track high-level cloud-top structures using this channel combination. In addition,the changes in the solar radiation that reaches the clouds during the daylight period have astrong influence on BTD throughout the 15min image interval, making the tracking processesdifficult. For the daylight period, the sunlight backscattered by liquid water clouds greatlycontributes to the total radiance observed at the 3.9 µm wavelength. This reflected shortwavesolar radiation superimposes the thermal differences of clouds usually seen in the atmosphericwindow IR channels, making the use of the 3.9 µm channel combined with the other windowIR channel inappropriate in daytime. In future work, this channel combination can be testedby estimating the flows of low- to mid-level clouds surrounding the deep convection clusters.
Inoue (1985) showed that the brightness temperature difference between 11 and 12 µm canbe used to detect semi-transparent cirrus clouds. Combinations 8.7–10.8 µm (Baum et al. 2000)and 10.8–12 µm (Inoue 1985; Saunders and Kriebel 1988; Strabala, Ackerman, and Menzelw1994) are useful in classifying pixels related to ice crystals or cloud droplets, and 6.2–10.8 µm isuseful in detecting penetrative cloud scenarios (Machado et al. 1998). Figure 1 shows an
332
310
289
267
246
224
Brig
htne
ss te
mpe
ratu
re d
iffer
ence
(K
)
Brig
htne
ss te
mpe
ratu
re d
iffer
ence
(K
)
Brig
htne
ss te
mpe
ratu
re d
iffer
ence
(K
)
Long
itude
(°)
Long
itude
(°)
Latitude (°)
IR 10.8 03/08/2006 12:30 UTC WV6.2-IR10.8 03/08/2006 12:30 UTC
IR8.7-IR10.8 03/08/2006 12:30 UTC
1615
1413
1211
109
1615
1413
1211
109
Long
itude
(°)
1615
1413
1211
109
Long
itude
(°)
1615
1413
1211
109
1615
1413
1211
109
1615
1413
1211
109
1615
1413
1211
109
1615
1413
1211
109
203
181
160
10
10
4
–1
–6
–12
–18
–23
–29
–35
8
7
5
4
2
1
0
–2
Brig
htne
ss te
mpe
ratu
re d
iffer
ence
(K
)
10
8
7
5
4
2
1
0
–2
0 2 4 6 8
Latitude (°)0 2 4 6 8
Latitude (°)0 2 4 6 8
0 2 4 6 8 0 2 4 6 8
0 2 4 6 8
Latitude (°)IR10.8-IR12.0 03/08/2006 12:30 UTC
0 2 4 6 8
0 2 4 6 8
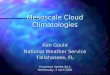
Figure 1. Brightness temperature difference for 3 August 2006 12:30 UTC. SEVIRI 10.8 µmimage (top, left), BTD 6.2–10.8 µm (top, right), BTD 8.7–10.8 µm (bottom, left), and BTD 10.8–12 µm (bottom, right). Note the different colour ranges for each plot. Missing values (white) representlocations where at least one brightness temperature was warmer than 265 K or colder than 160 K inany SEVIRI channel.
654 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

example of each of the three channel combinations used in this study, as well as a SEVIRIwindow IR image from 10.8 µm as reference. These three channel differences allowmonitoringof the general features found in deep convective cloud tops and their surrounding areas: theovershooting core at the centre of the system, the cirrus associated with high-level mesoscalewind divergence, and the lower water and mixed-phase clouds. We can see from Figure 1 thatthe BTD 6.2–10.8 (top-right corner) clearly identifies the penetrative tops normally related todeep convective vertical fluxes and water vapour injected into the stratosphere (yellow andorange tones). This characteristic is not captured by the other two BTDs, as shown in Figure 1.Cirrus clouds, westward of the deep convective area, are very well identified by the BTDs8.7–10.8 µm and 10.8–12 µm (yellow and orange tones). The BTD 8.7–10.8 µm shows cloudregions composedmainly of water (dark blue), mixed phase (light blue), and ice (other colours).
The BTD 10.8–12 µm can be negative under strong surface-based temperature inver-sions: when viewing barren surfaces (e.g. deserts) under clear-sky conditions; whenviewing volcanic ash and certain non-volcanic mineral-based aerosols (e.g. dust); whencloud tops overshoot the tropopause due to stratospheric temperature inversion; and due toinstrument noise. High water-vapour burdens can mask the negative BTD 10.8–12 µmsignal when viewing an actual ash cloud (Pavolonis et al. 2006). Situations involvingsurface temperature are discarded because a threshold of 265 K was applied to eachthermal image before calculating the BTD. Every pixel warmer than the predefinedminimum value has been eliminated. For SEVIRI BTD 10.8–12 µm, the minimumvalue observed was approximately –1 K, occurring mainly on overshooting cloud tops.In these regions, the spatial variance of the BTD values compromises the pattern recogni-tion algorithm, which is the basis of the tracking process, leading to the finding of randomtargets and, consequently, BTD-AMVs which do not represent realistic wind. However,the occurrence of negative values from this channel’s difference is very low. The 265 Kthreshold also eliminates very thin cirrus. To estimate the smaller scale flows associatedwith very thin cirrus, negative BTD, a more specific cloud mask should be added to theprocedure.
Once the new BTD image is prepared, a tracking algorithm is applied to the images.The algorithm used for tracking was adapted from the CPTEC/INPE scheme (Negri andMachado 2008). All pixels with values outside the defined BTD range (surface and lowclouds) receive a random value in order to lessen their influence in the tracking cross-correlation calculations. To detect mesoscale movements, the target window size must bedecreased in comparison with the operational wind extraction scheme. The CPTEC/INPEoperational scheme uses a target window of 32 × 32 pixels for the 6 µm water vapour and24 × 24 for the 3.9 and 10.2 µm window infrared channels of the GeostationaryOperational Environmental Satellite (GOES)-10/12 satellites.
The inner cloud dynamics tracking algorithm considers the following assumptions.
(a) It uses only image pairs instead of the triplet used in the operational CPTEC/INPEscheme. The characteristic time scale of the movements to be detected is veryshort, so it does not make sense to use a third image, as is usually done in aconventional AMV-generation algorithm.
(b) A small target window is used. Various values between 5 and 14 pixels have beentested and a size of 8 × 8 pixels was chosen. Bedka and Mecikalski (2005) usedtarget windows with sizes of 5 × 5 pixels when using 4 km resolution IR images.However, such a window size is too small for our calculations due to the sparseBTD population in the cloud top boundaries. We must choose an image segmentas small as possible when we are interested in tracking small-scale movements,
International Journal of Remote Sensing 655
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

but also large enough to contain a well-defined pattern that can be easily identifiedduring the tracking process.
(c) The process allows the target window to have an overlap with the neighbouringwindows. Several overlaps have been tested and an optimal value of 25% (twopixel rows or lines in the 8 × 8 target window) was chosen. The overlap increasesthe vector size but the threshold must be chosen carefully to prevent situationswhere the same structure gives two or more vectors, leading to a false spatialcoherence.
(d) Our process is only applied to the top of convective systems because it has amesoscale structure. To avoid warmer values or unrealistic cloud values, thistechnique is applied only for brightness temperatures warmer than 160 K orcolder than 265 K. Pixels outside this interval are eliminated by replacing theirvalues by a random number so as not to influence the tracking process.
(e) A minimum number of valid pixels is required to allow the target window to beused. The maximum value of disposed pixels is set to 35% of the pixel populationwithin the target window. Considering the 25% target window overlap (item c),the 40% of remaining pixels are only observed in each target window, ensuringthat overlapping target windows are largely an independent set of pixels, allowinga BTD-AMV of a different part of the cloud top.
Table 1 describes the channel combinations used to compute the winds and the applicationsand interpretation as a function of the BTD range.
The procedures employed in this study do not use any quality control and heightassignment. We focus only on the possibility of extracting extra information that can beobtained through the usual AMV techniques. Suitable automatic quality control should bedeveloped in the future. The existing filters are not useful because their purpose is theconsideration of only large-scale wind patterns, leading to the identification of manyphysically coherent BTD-AMVs as bad wind vectors.
One possible application of the BTD-AMV would be in high-resolution numericalmodel assimilation, which could be the focus of a future study.
Table 1. Brightness temperature difference and its applications and range for detection.
SEVIRI BTD Applications BTD range/structure
6.7–10.8 µm Cloud height relative totropopause; overshootingclouds
BTD > 0 K : overshooting (but > –2 K fortracking features)
−14 K < BTD ≤ –2 K : highly developedcloud top
BTD ≤ 14 K : less developed convectivecloud top
8.7–10.8 µm Cloud classification: waterclouds, mixed-phase and iceclouds
BTD ≤ −1 K : water clouds−1 < BTD ≤ 0.5 K : mixed-phase cloudsBTD > 0.5 K : ice clouds
10.8–12.0 µm Cloud type; cirrus detection BTD > 5 K : thin cirrus (Strabala, Ackerman,and Menzelw 1994)
0 < BTD ≤ 5 K water, mixed phase, and thickcirrus
BTD < 0 sensor noise to cold brightnesstemperature or ash (Pavolonis et al. 2006)
656 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

3. Analyses and validation
This section describes the analyses done to verify the quality of the AMV estimated by theBTD images. First, the BTD-AMValgorithm was evaluated using MSG imagery generatedwith a high-resolution NWP simulation, and the BTD-AMVs were derived from thesesimulated images. Using this approach it was possible to compare BTD-AMVs within theNWP winds, which can be considered the ‘truth wind’, and verify whether the BTD-AMVtechnique is able to detect wind flows associated with deep convective cloud tops.
Next, the technique was applied over three days having large convective activity: 3, 6,and 18 August 2006. For each day, only a small segment of the whole MSG full disk imagewas used to isolate the strongest convective activity, to clarify the use of this tool (Figure 2).The size of each zone was defined to capture all of the convective complexes during the lifecycle for each case. The wind fields obtained were compared with wind profiles from theECMWF high-resolution forecast model. Also, an indirect verification of the technique’sability was carried out, where the high-level wind divergence, calculated by the windsobtained by the proposed technique, showed a correlation with cloud life cycles.
3.1. BTD-AMVs from UK Met Office Unified Model simulated SEVIRI radiances
The BTD-AMV was applied to a set of simulated SEVIRI radiances using the RTTOV(Radiative Transfer Model for TOVS) with the UK Met Office’s Unified Model (UK-UM)atmospheric profiles as input data. The UK-UM was run with high time and spatialresolutions as part of the CASCADE project (NERC 2008). CASCADE is a fundedconsortium project focused on studying organized convection in the tropical atmosphereusing large-domain cloud system-resolving model simulations.
These high-resolution model data allowed us to simulate SEVIRI radiances at higherspatial resolution than the actual 3 km SEVERI image. The 6.2, 8.7, 10.8, and 12 µmSEVIRI channels were simulated for 26 July 2006, from 13:00 to 13:45 UTC, to verify thetechnique presented in this article. The SEVIRI thermal channels were simulated using theradiative transfer model RTTOV version 9.3 (R9REP 2010). SEVIRI radiances were simu-lated using the same UK-UM spatial resolutions of 1.5 × 1.5 km and 15 min. Version 7.1 ofthe UK-UM used in the CASCADE project and its configuration is described by Lean et al.(2008). The atmospheric profiles used as input to RTTOV in this study are shown in Table 2.The first step was to build virtual UK-UM SEVERI images for the two time steps.
The comparison between the model winds and the BTD-AMVs was done by means ofa comparison of the u/v wind components within the NWP wind profile, looking for thepressure level where both BTD-AMV u/v components were lower. This comparison isknown as ‘best-fit adjustment’ and is usually done to compare normal AMVs within NWPanalysis or forecasts to validate AMV datasets. In this section, the best-fit adjustment wasused to verify whether the winds estimated by the BTD-AMV technique matched theNWP wind at a physically consistent pressure level.
Here, only BTD-AMV vectors having scalar velocity less than 3 m s−1 compared withthe UK-UM wind profile at some level were best-fit adjusted. The sensitivity of windspeed detection by the tracking algorithm, using full disk SEVIRI images (3 × 3 km each15 min), is around 3 m s−1 at sub-satellite points, so this threshold makes the comparisonwithin the NWP very restricted. The BTD-AMV pressure was then set to the best-fitpressure found in the UK-UM fields. If this condition was not satisfied, the best-fit levelwas not considered and the BTD-AMV was set to an undefined pressure level. Thealgorithm was also computed using the UK-UM SEVIRI simulations in 6.2, 8.7, 10.8,
International Journal of Remote Sensing 657
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

–5 0
1612
84
0–4
–8–1
2
Long
itude
(°)
1612
84
0–4
–8–1
216
128
40
–4–8
–12
1612
84
0–4
–8–12
1612
84
0–4
–8–12
1612
84
0–4
–8–12
5 10 15 20 25 30 35
–5 0 5 10 15 20 25 30 35–5 0 5 10 15 20 25 30 35
–5 0 5 10 15 20 25 30 35
–5 0 5 10 15
Latitude (°)20 25 30 35
–5 0 5 10 15 20 25 30 35
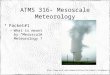
Figure 2. The three areas over the African tropical zone used for technique evaluation on 3 (top),6 (centre), and 18 (bottom) August 2006. Images from SEVIRI IR 10.8 µm channel are plotted asbackground.
658 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

and 12 µm channels using all criteria adopted for the BTD-AMV, as for instance, thebrightness temperature between 160 and 265 K. This best-fit adjusted technique is here-after termed BFP (best-fit pressure).
Once the displacements of the clouds resolved by the cloud scheme of the UK-UM aredirectly related to the UK-UM winds, the AMVs estimated by a tracking algorithm mustbe close to the model’s winds. For some locations, differences in direction and speed dueto mismatch in the tracking algorithm or cloud model microphysical inconsistencies areexpected.
Figures 3 and 4 show examples of the BTD-AMV and SEVERI-AMV, obtained fromCASCADE/RTTOV SEVIRI simulations, for 26 July 2006, 13:15 to 13:45 UTC, over asmall area of the tropical sub-Saharan region. BTD-AMV is frequently different fromcollocated SEVIRI-AMV.
No quality control filter was applied to the BTD-AMVs, so it is likely that some ofthe additional BTD-AMVs would not be valid vectors. However, for many situationsthese vectors are physically realistic. Due to the higher spatial resolution (1.5 × 1.5 kmagainst 3 × 3 km for real SEVIRI images), the wind fields can be estimated moreprecisely. The increase in AMV spatial density was smaller than expected, being clearlyvisible in Figure 3.
The simulations are spatially smoother than real SEVIRI images, mainly in the innercloud top portions, making automated tracking processes very difficult. The trackingprocedure is based on spatial pattern recognition, and homogeneous targets (here, cloudsegments) are harder to track due to ambiguous results. This homogeneity also compro-mises the channel combination, the resultant BTD images also being spatially smootherthan the original ones. Also, the NWP cloud microphysical species distribution is simpleif compared with the real situation. These two deficiencies in the model explain the lackof BTD-AMVs in the inner portion of the cloud tops, as well as the concentration of BTD-AMVs that fail in the best-fit adjustment in these areas.
The description of the cloud boundary dynamics makes it possible to calculate themass flux at the cloud top. Generally, the winds are very physically coherent, showingcloud top expansions at the moment strong convective cells are developing. BTD AMVsare sometimes more numerous than SEVERI-AMVs, and they show shear conditions oftwo very spatially consistent flows. The BTD-AMVs from the CASCADE simulations arelocated mainly over the cloud top boundaries, which are usually cirrus clouds. TheseBTD-AMVs are less consistent spatially than the default AMVs, but they are self-consistent in time and space, indicating that this is not an error of the tracking algorithm.
Table 3 presents the statistics of AMVs and BTD-AMVs that fail on the best-fitadjustment for each CASCADE/SEVIRI simulated channel and its channel combinations.The amount of mismatch for all channels and channel combinations is basically the same
Table 2. UK-UM profiles used as input for the RTTOV simulations.
3D fields 2D fields
Pressure (hPa) Temperature at 1.5 m (K)Temperature (K) Specific humidity at 1.5 mSpecific cloud, liquid Surface temperature (K)Specific cloud, frozen Surface pressure (hPa)Cloud cover at each level (%) Land/sea maskIce cloud fraction (%)Water cloud fraction (%)
International Journal of Remote Sensing 659
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

for the AMVs (around 10%) and BTD-AMVs, except for the WV 6.2 µm channel, whichhas the highest failure rate (around 14%). This higher value is explained by the clear skywind vectors that are known as being noisier. The higher number of AMVs for the WVchannel is mainly due to the possibility of tracking water vapour AMVs over clear skysituations. The BFP failure rate is very similar when using a SEVIRI channel and using achannel combination. This indicates that the use of BTD images enables wind estimation
3280 1
0 1
0 1Latitude (°)
WV062 26/07/2006 13:15 UTC0 1
WV062 26/07/2006 13:30 UTC0 1
WV062 26/07/2006 13:45 UTC
IR087 26/07/2006 13:15 UTC0 1
0 1Latitude (°)
IR087 26/07/2006 13:30 UTC0 1
0 1Latitude (°)
IR087 26/07/2006 13:45 UTC
0 1
0 1Latitude (°)
IR108 26/07/2006 13:45 UTC
0 1
0 1Latitude (°)
IR120 26/07/2006 13:45 UTC
0 1
0 1Latitude (°)
IR108 26/07/2006 13:30 UTC
0 1
0 1Latitude (°)
0 1Latitude (°)
0 1Latitude (°)
IR120 26/07/2006 13:30 UTC
0 1
0 1Latitude (°)
IR108 26/07/2006 13:15 UTC
0 1
0 1Latitude (°)
0 1Latitude (°)
IR120 26/07/2006 13:15 UTC
313
298
283
268 1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
1514
1514
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
253
BT
D (
K)
239
224
209
194
179
164
150
1514
Long
itude
(°)
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
1514
Long
itude
(°)
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
1514
Long
itude
(°)
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
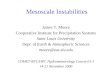
Figure 3. SEVERI-AMV for 13:15 to 13:45 UTC, 26 July 2006 extracted from CASCADE/RTTOVS SEVIRI simulations. From top to bottom: 6.2, 8.7, 10.8, and 12 µm SEVIRI channels.Vectors which best fit the wind of the model at some level are plotted in blue and those which do notfit are plotted in red.
660 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

with similar capability to the well-known default procedure using a single channel. Wemust remember that the SEVIRI/BTD-AMV used here had not passed through a qualitycontrol as is usually done for operational procedures. The failure rate is low and indicatesthat the technique is reasonable in regard to the numerical method.
10
6
3
0
–3
–6
–10
–13BT
D (
K)
–16
–20
–23
–26
–30
10
6
3
0
–3
–6
–10
–13BT
D (
K)
–16
–20
–23
–26
–30
10
6
3
0
–3
–6
–10
–13BT
D (
K)
–16
–20
–23
–26
–30
0 1WV062–IR108 26/07/2006 13:15 UTC
0 1WV062–IR108 26/07/2006 13:30 UTC
0 1WV062–IR108 26/07/2006 13:45 UTC
1514
Long
itude
(°)
1514
Long
itude
(°)
1514
Long
itude
(°)
0 1
0 1Latitude (°)
IR087–IR108 26/07/2006 13:15 UTC0 1
0 1Latitude (°)
IR087–IR108 26/07/2006 13:30 UTC0 1
0 1Latitude (°)
IR087–IR108 26/07/2006 13:45 UTC
0 1
0 1Latitude (°)
IR108–IR120 26/07/2006 13:45 UTC0 1
0 1Latitude (°)
IR108–IR120 26/07/2006 13:30 UTC0 1
0 1Latitude (°)
0 1Latitude (°)
0 1Latitude (°)
0 1Latitude (°)
IR108–IR120 26/07/2006 13:15 UTC
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
Long
itude
(°)
1514
1514
1514
Figure 4. BTD-AMV for 13:15 to 13:45 UTC, 26 July 2006 extracted from CASCADE/RTTOVSSEVIRI simulations. From top to bottom: 6.2–10.8, 8.7–10.8, and 10.8–12 µmBTD.Vectors which bestfit the wind of the model at some level are plotted in blue and those which do not fit are plotted in red.
Table 3. Fractions of SEVIRI-AMV and BTD-AMV that fail in the best-fit adjustment for theCASCADE/SEVIRI simulations, total AMVs samples, and number of wind fields analysed. SEVIRIor BTD-AMVs are indicated by the image (or combination) used for estimation.
Image type BFP fail (%) Total AMVs AMV fields (n)
WV6.2 – IR10.8 μm 10.5 6397 4IR8.7 – IR10.8 μm 10.7 6104 4IR10.8 – IR12 μm 12.3 5463 4IR10.8 μm 10.5 7060 4IR8.7 μm 10.4 7156 4WV6.2 μm 14.6 94400 4IR12 μm 10.3 7378 4
International Journal of Remote Sensing 661
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

The application of the wind estimative technique based on channel combinations in asimulation scenario shows that it is possible and can be applied to real images, as will beshown in the next section.
3.2. ECMWF NWP comparison
After the simulated scenario verification, the BTD-AMV technique was applied to realSEVIRI images and the wind vector obtained was compared with the ECMWF) NWPwind profiles. The comparison between the BTD-AMVs and the ECMWF NWP windswas done as described in Section 3.1 by best-fit adjustment. However, in this section, thepurpose of this comparison was to understand whether wind vectors found within thesame area were at different levels (associated with wind shear) or represented a differentwind structure (apparent movement due to microphysical changes) at the same cloud toplevel. Once the NWP winds reproduce mesoscale winds, a BTD-AMV associated with anapparent movement due to microphysical changes will not match the model’s profile,failing in the best-fit adjustment or matching the NWP wind profile at an unrealistic level.
The ECMWF NWP forecast fields with 1° × 1° horizontal grid resolution and 91vertical levels, have been used following similar procedures employed by Mahfouf andRabier (2000). Neither SEVIRI nor BTD AMVs were assimilated in the ECMWF NWPruns used here. This example employs analysis or forecast fields, and is always chosen atthe time nearest to the wind field being compared.
Table 4 presents the fraction of AMVs that failed BFP adjustment as well as the totalnumber of AMVs of each single SEVIRI channel or BTD image and the number of AMVfields considered. The fraction of the SEVIRI/BTD-AMVs that failed on the BFP adjust-ment varied by around 30%. The fraction with the largest failure rate occurred for SEVIRIWV 6.2 µm AMVs, 44%, which is similar to that shown in the previous section, but muchhigher. The difference in grid resolution of the NWP explains this difference.
BTD-AMVs, in the scale they are computed, do not represent MCS displacement butthe area expansion of the convective system that is related to the upper level divergence(Machado and Laurent 2004). The MCS displacement that moves as a function of thesteering level (Moncrieff and Miller 1976) will not match a specific level of the meanwind described by the NWP. However, the winds described in this methodology are thosecontributing to this upper level divergence, but introducing the details of this complexinner structure in the cloud top. The cloud top has smaller scales of updrafts in the activecloud top regions, or the penetrative regions (Machado et al. 2008), or the regions indissipation stage. As no quality control test was applied to the SEVIRI-AMV and
Table 4. Results of the best-fit pressure (BFP) between SEVERI-AMV and BTD-AMV withECMWF data, total AMVs samples, and number of wind fields analysed. The SEVIRI or BTD-AMVs are indicated by the image (or combination) used for estimation.
Image type BFP fail (%) Total AMVs AMV fields (n)
WV6.2 – IR10.8 μm 27.1 163,330 255IR8.7 – IR10.8 μm 29.6 112,950 255IR10.8 – IR12 μm 26.7 138,464 255IR10.8 μm 29.4 224,707 255IR8.7 μm 28.8 224,315 255WV6.2 μm 44.4 434,189 255IR12 μm 30.7 239,330 255
662 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

BTD-AMV, the similar failure rate of BFP indicates a very similar noise level for theBTD-AMV technique and the SEVIRI-AMV. BFP failure rates were initially expected tobe larger for BTD-AMV because the resulting BTD images are noisier than the usualSEVIRI images, and this technique allows the retrieval of cloud top dynamics that are notnecessarily reproduced by the ECMWF NWP. However, the failure rates are basically thesame as all the IR AMV fields and always higher for the WVAMVs. A fraction of thesevectors is likely describing the cloud top boundary displacements or perhaps the growth ordisplacement of an area domain by a specific kind of ice crystal near the cloud top. Underthese situations, it is expected that the NWP will not reproduce this cloud boundarydisplacements, so the AMV related to this signal will not match the NWP at any level orthe match will be at an unrealistic level.
Figure 5 shows histograms of the BFP differences between each of the threeBTD-AMVs used in this study and their respective SEVIRI-AMV single channel forsituations where at least one SEVIRI-AMV, from any channel, is at the same position(same target window location). All collocated SEVIRI-AMVs and BTD-AMVs werecompared, with each possible pair (SEVIRI-AMV, BTD-AMV) giving one BFP differ-ence value each. Situations where more than one SEVIRI-AMV is at the same positionthan one or more BTD-AMV is unlikely and happens only at cloud tops. Because onlyvery high cloud tops are the focus of the BTD technique, these SEVIRI/BTD-AMVswill describe the wind flow in a narrow pressure layer. The left column in Figure 5shows the differences between the pressure levels assigned to SEVERI-AMV and
0.8
0.6
IR087–IR108 BFP difference IR087–IR108 SPD diff. BTD_AMV below IR087–IR108 SPD diff. BTD_AMV above
IR108–IR120 SPD diff. BTD_AMV belowIR108–IR120 BFP difference
BTD dif: SEVIRI – BTD_AMV (hPa) SEVIRI_AMV – BTD_AMV (ms–1)
0.4
0.2Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.6
0.4
0.2
Freq
uenc
y (%
)
0.0
0.8
0.6
0.4
0.2Freq
uenc
y (%
)
0.0
0.8
0.6
0.4
0.2Freq
uenc
y (%
)
0.0
–200 –100 100 200 –20 –10 0 10 20
IR108–IR120 SPD diff. BTD_AMV above
SEVIRI_AMV – BTD_AMV (ms–1)–20 –10 0 10 20
SEVIRI_AMV – BTD_AMV (ms–1)–20 –10 0 10 20
SEVIRI_AMV – BTD_AMV (ms–1)–20 –10 0 10 20
SEVIRI_AMV – BTD_AMV (ms–1)
–20 –10 0 10 20
SEVIRI_AMV – BTD_AMV (ms–1)
–20 –10 0 10 20
0
WV062–IR108 BFP difference WV062–IR108 SPD diff. BTD_AMV below WV062–IR108 SPD diff. BTD_AMV aboveBTD dif: SEVIRI – BTD_AMV (hPa)
–200 –100 100 2000
BTD dif: SEVIRI – BTD_AMV (hPa)
–200 –100 100 2000
Figure 5. BFP and speed difference histograms between SEVERI-AMV and BTD-AMV for threechannel combinations: IR 8.7–IR 10.8 µm (top), IR 10.8–IR 12.0 µm (centre), and WV 6.2–IR10.8 µm (bottom). The left column shows the pressure height differences between SEVERI-AMVand the BTD-AMV (negative values denote that BTD-AMV is at a lower altitude than defaultAMV). The middle column shows the speed differences between SEVERI-AMV and BTD-AMVonly for the AMV pairs at which the BTD-AMV is at a lower altitude than SEVIRI-AMV, and theright column shows the speed differences for the opposite situation. A positive speed differencemeans that the BTD-AMV is slower that the respective SEVIRI-AMV.
International Journal of Remote Sensing 663
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

BTD-AMV. Negative values mean that BTD-AMV is set to a lower level than SEVIRI-AMV. The middle column shows the speed differences between SEVERI-AMV andBTD-AMV only for situations where BTD-AMV is at a lower level (when SEVIRI-AMV minus BTD-AMV BFP differences are negative), and the right column shows thespeed differences for the opposite cases. The BFP histogram shows a maximum peak at0 hPa, meaning that in the majority of the cases, both vectors are at nearly the samelevel but are slightly different. The BTD-AMV gives information about the wind fieldspatial structure in the cloud top. The histogram shows that nearly all values are ±100hPa. It also shows that vectors retrieved at the same location can similarly indicateinformation about the wind shear in the cloud top. Positive speed differences inhistograms mean that the BTD-AMV is slower than its collocated SEVIRI-AMV andnegative differences have the opposite meaning. Figure 5 (middle and right-handcolumns) shows that the BTD-AMV has a larger number of vectors with lower speedswhen it is at a lower level than the collocated SEVIRI-AMV, and higher speeds when itis assigned to higher levels than the collocated SEVIRI-AMV. This result is physicallyconsistent since, generally, higher level winds are associated with a high level of winddivergence. This physical consistency shows that this methodology gives additionaldetails about the wind structure near the convective cloud tops.
Figures 6 and 7 show SEVERI-AMV and BTD-AMV, respectively, extracted for 3August 2006, from 15:00 to 15:30 UTC. To clarify the wind fields, we selected a verysmall image segment and plotted each kind of vector separately over its own image.Vectors which failed in the best-fit adjustment are plotted in red while those which got aBFP are plotted in blue. Refer to Table 1 for BTD intervals and their respective physicalmeans. BTD-AMVs are more numerous over the cloud top boundaries, where cirrusclouds (BTD8.7–10.8 µm > 0.5 K and BTD10.8–12 µm > 1 K) show a typically high levelof wind divergence. In the BTD images, the spatial patterns are better defined on thehorizontal boundaries than on the inner zone of the convective cloud top. When thetracking process is based on cloud pattern recognition, BTD-AMV is estimated mostly atthe top boundaries. An opposite scenario happens for the SEVIRI default images, wherethe spatial patterns are well defined all over the cloud top, leading to estimation ofSEVIRI-AMV (channels 8.7, 10.8, and 12 µm) mainly over the inner region of the topcloud. In most cases, SEVIRI-AMVs are generally not estimated over the cloud topboundaries, unlike BTD-AMVs.
The spatial and temporal consistency of SEVIRI and BTD AMV are illustrated inFigures 6 and 7, which show that many AMVs are physically realistic, based on theexpected wind flow that they represent as well as by their spatial consistence. Forexample, the red SEVIRI-AMV on the southern portion of the convective systemdescribes the southwardly cloud expansion that can be easily verified by the backgroundBTD image. This behaviour is also captured by the BTD-AMV technique, but not as wellas using SEVIRI-AMV. However, the opposite situation occurs at the northwestern point,where the BTD-AMV better captures upper-level divergences and expanding areas thanindividual SEVIRI channels. This clearly illustrates the additional information that canpotentially be captured using the BTD technique, complementing existing AMVs.
The example shown in Figures 6 and 7 is a mesoscale convective system in the firsthours of its life cycle, where a strong horizontal expansion is occurring. The temporalconsistency of these movements and their agreement with realistic pressure levels of theECMWF NWP at the southern and northwestern boundaries indicate that physical infor-mation exists that can improve the description of the cloud processes. The following
664 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

section will explore an application of the BTD-AMV technique for nowcasting to provethat these techniques extract wind in a physically consistent manner.
3.3. Relationship between divergence and BT D-AMV
This section presents a verification of the relationship between the high levels of winddivergence, calculated from BTD-AMV, and the co-located evolution of mean brightnesstemperature.
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
328
313
298
283
268
253
BT
D (
K)
239
224
209
194
179
164
150
1816
1816
Long
itude
(°)
1816
Long
itude
(°)
1816
1816
1816
1816
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
1816
Long
itude
(°)
1816
Long
itude
(°)
1816
Long
itude
(°)
1816
Long
itude
(°)
6
6
6
WV062 03/08/2006 15:00 UTC6
WV062 03/08/2006 15:15 UTC6
WV062 03/08/2006 15:30 UTC
Latitude (°)IR087 03/08/2006 15:00 UTC
6
6
Latitude (°)IR108 03/08/2006 15:15 UTC
6
6
Latitude (°)IR108 03/08/2006 15:30 UTC
6
6
Latitude (°)IR087 03/08/2006 15:15 UTC
6
6
Latitude (°)IR087 03/08/2006 15:30 UTC
6
6
Latitude (°)IR120 03/08/2006 15:15 UTC
6
6
Latitude (°)IR120 03/08/2006 15:30 UTC
6
6
Latitude (°)IR108 03/08/2006 15:00 UTC
6
6
Latitude (°)IR120 03/08/2006 15:00 UTC
6Latitude (°)
6Latitude (°)
6Latitude (°)
Figure 6. SEVIRI-AMV for 15:00 to 15:30 UTC, 3 August 2006. From top to bottom: 6.2, 8.7,10.8, and 12 µm SEVIRI channels used. Vectors assigned to the best-fit pressure from the ECMWFmodel at some level are plotted in blue, and those which do not fit are plotted in red.
International Journal of Remote Sensing 665
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

The high level of wind divergence is directly related to the development of clouds,especially the deep convection (see Machado and Laurent 2004). When a high level winddivergence is present and it is associated with cloud development, a decrease in localmean brightness temperature is expected because the cloud tops are becoming higher andcolder. An inverse situation is expected when high-level wind convergence is present.
A way to verify whether the proposed BTD-AMV technique is capable of detectingthe wind flows associated with convection development is to analyse the life cycle of theconvection and the wind divergence calculated from BTD-AMVs in the same location.
Following this hypothesis, the horizontal divergence field was computed using BTD-AMV6.2–IR 10.8 µm only for BTD between –30 and –14 K. Using this BTD range, deepercloud tops were excluded and only clouds with potential for growing/overshooting in thefollowing hours were taken in account, being the best case to evaluate whether theproposed technique is physically consistent. The trend in brightness temperature wascalculated by the MSG infrared window at 10.8 μm.
For this analysis, a sequence of METEOSAT-8 images with 15 min intervals, from10:45 to 22:45 UTC for 3 August 2006 was used.
The first step was to find regions with sufficient density of BTD-AMVs and inter-polate these vectors in space to further calculate the divergence field using discrete
10
6
3
0
–3
–6
–10
–13BT
D (
K)
BT
D (
K)
–16
–20
–23
–26
–30
10
9
8
7
6
5
4
3
2
1
0
–1
–2
BT
D (
K)
10
9
8
7
6
5
4
3
2
1
0
–1
–2
1816
Long
itude
(°)
1816
1618
Long
itude
(°)
1816
1618
Long
itude
(°)
1816
1618
Long
itude
(°)
1816
1618
1618
1618
1618
Long
itude
(°)
1816
1618
Long
itude
(°)
1816
1618
Long
itude
(°)
1816
Long
itude
(°)
1816
Long
itude
(°)
6WV062–IR108 03/08/2006 15:00 UTC
6WV062–IR108 03/08/2006 15:15 UTC
6WV062–IR108 03/08/2006 15:30 UTC
6
6
Latitude (°)IR087–IR108 03/08/2006 15:00 UTC
6
6
Latitude (°)IR087–IR108 03/08/2006 15:15 UTC
6
6
Latitude (°)IR087–IR108 03/08/2006 15:30 UTC
6
6
Latitude (°)IR108–IR120 03/08/2006 15:00 UTC
6
6
Latitude (°)IR108–IR120 03/08/2006 15:15 UTC
6
6
Latitude (°)IR108–IR120 03/08/2006 15:30 UTC
6Latitude (°)
6Latitude (°)
6Latitude (°)
Figure 7. BTD-AMV for 15:00 to 15:30 UTC, 3 August 2006. From top to bottom: 6.2–10.8, 8.7–10.8, and 10.8–12 µm BTD. Vectors assigned to the best-fit pressure from the ECMWF model atsome level are plotted in blue, and those which did not fit are plotted in red.
666 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

calculations. The brightness temperature trend was computed for each point wheredivergence was assessed. The brightness temperature trend (ΔBTir) in the IR 10.8 µmchannel was assessed by calculating the mean brightness temperature in a 13 × 13 pixelimage segment. The ΔBTir was computed for 15, 30, and 45 min after the time of theprevious image used to compute BTD-AMV. For each of these three time steps,the 13 × 13 image segment was centred at the location where the cloud segment wasused to calculate BTD-AMVs, and consequently the wind divergence, to take into accountthe advection of the MSC as a whole. The definition of the possible position in each timestep was estimated by the large-scale wind flow. Negative values of ΔBTir indicate adecrease in mean brightness temperature, so the clouds are in a developing stage, whilepositive values indicate situations where clouds are dissipating.
To verify the expected relationship for different periods of the convection life cycle,the whole image sequence was divided in successive subsets of 2 h each (10:45 to 12:45UTC, 12:45 to 14:45 UTC, and so on).
Figure 8 presents the relationship between the horizontal BTD-AMV divergence andthe mean brightness temperature as described, where the plots of each subset are presentedon each line.
In the first two periods (10:45 to 12:45 and 12:45 to 14:45 UTC), a concentration alongthe vertical axis is observed, indicating weak divergence or convergence, i.e. as expected forthis period of the day in tropical Africa. For the next period (14:45 to 16:45 UTC), thevalues of the bi-dimensional histogram are concentrated in the two quadrants where thebrightness temperature trend is negative (development of cloud tops). In the next period(16:45 to 18:45 UTC), the correlation between wind divergence and decrease in meanbrightness temperature is clear, remaining so for the next period (18:45 to 20:45 UTC). Forthe final period, a correlation between wind convergence and decrease in mean brightnesstemperature is still clear. One can expect an increase in Tir but, instead, a decreasepredominates as an effect of the cirrus that remains after dissipation of the deep convection.
This analysis shows that the proposed technique is able to detect a well-knowncharacteristic of the convection life cycle and indicates a possible application fornowcasting.
4. Conclusions
This study tested the possibility of detecting inner/outer movements of deep convectivecloud tops through the application of a modified AMV tracking algorithm to variousinfraredMeteosat-8 channel combinations. High-spatial resolution numerical simulationsdone by UK-UM, where clouds were explicitly resolved, were used to test the ability ofthe BTD-AMV algorithm, retrieved BTD-AMVs were compared to correspondingECMWF NWP wind profiles, and a physically consistent relationship between the winddivergence calculated from a specific BTD-AMV group and the convection life cycle wasfound.
The results show that the proposed technique detects physically consistent movementsthat are sometimes different from the flow extracted by single SEVIRI channels at thesame place, giving additional information on cloud processes. These motions correspondto local wind shear situations, divergence, or convergence zones, or apparent movementswhere zones with specific microphysical properties grow or dissipate. In many ways,BTD-AMV complements SEVIRI-AMV, indicating a promising use for increasing thespatial coverage of the usual AMVs and also providing higher-resolution wind fields thatmay be used for assimilation in high-resolution NWP models in the future.
International Journal of Remote Sensing 667
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

615 min after 30 min after 45 min after
45 min after
45 min after
45 min after
45 min after
45 min after
30 min after
30 min after
30 min after
30 min after
30 min after
WV062–IR108 03 Aug 2006 BTD: –30 to –14 K
15 min after
15 min after
15 min after
15 min after
15 min after
4
2
0
–2
–4
–6–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15 –15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15 –15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15–15
0.0 0.5 1.0 1.5Frequency (%)
2.0 2.5 3.0
–10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15 –15 –10 –5 0BTD–AMV Div. (S
–1) × 10
55 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15 –15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15–15 –10 –5 0
BTD–AMV Div. (S–1
) × 105
5 10 15
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
10:4
5 to
12:
45 U
TC12
:45
to 1
4:45
UTC
14:4
5 to
16:
45 U
TC16
:45
to 1
8:45
UTC
18:4
5 to
20:
45 U
TC20
:45
to 2
2:45
UTC
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
6
4
2
0
–2
–4
–6
Bt t
rend
(K
)
Figure 8. Relationship between brightness temperature trend (ΔBTir) in the IR 10.8 µm channeland horizontal BTD-AMV divergence for BTD WV6.2–IR 10.8 µm in the range –30 to –14 K for15 (left), 30 (centre), and 45 (right) min after divergence calculation. Data from 10:45 to 22:45UTC, with 15 min time resolution, from 3 August 2006 were used, being divided into successiveperiods of 2 h (each line represents one of these periods).
668 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

Performing BTD-AMV using UK-UM SEVIRI simulations as input shows that thetechnique presented in this study is capable of capturing mesoscale inner cloud topmovements. Also, this evaluation improves confidence in the tracking algorithm when asmall target window is used, the major default AMVs estimated from the WV 6.2 and IR10.8 µm SEVIRI channels closely matching the UK-UM wind fields.
Finally, a correlation between divergence or convergence zones calculated from theBTD-AMV wind fields and the trend in local brightness temperature was detected by theproposed technique, showing that it can capture wind flows in the cloud tops as well ashighlighting a possible future application for this technique.
The results presented in this study are promising because they detail specific innercloud-top structure for a specific microphysical property. BTD-AMV also provides addi-tional information that can be useful for simulations and understanding the processes ofcloud evolution. This study indicates also that extraction of high-resolution wind fields ispossible from classified imagery.
The SEVIRI 3 × 3 km spatial resolution imposes a significant limitation to acquiringmore numerous BTD-AMVs due to the small target window size (8 × 8 pixels), some-times compromising the pattern track process. The SEVIRI imagery simulated with theUK-UM model, with 1.5 × 1.5 km spatial resolution used to perform the BTD technique,shows that a more detailed wind field can be obtained. In the near future, when theMeteosat Third Generation and GOES-R satellites are operational, the technique presentedhere may be implemented with improved results.
AcknowledgementsWe are very grateful to the UK Met Office and Reading University CASCADE group who gave thehigh-resolution simulation data and to the UK Met Office satellite assimilation group for supportwith the RTTOV simulations.
FundingWe are very grateful to Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) andFundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP) [grant number 2009/15235-8] forfinancial support.
ReferencesAckerman, S. A., W. L. Smith, J. D. Spinhirne, and H. E. Revercomb. 1990. “The 27–28 October
1986 FIRE IFO Cirrus Case Study: Spectral Properties of Cirrus Clouds in the 8–12 µmWindow.” Monthly Weather Review 118: 2377–2388.
Arking, A., and J. D. Childs. 1985. “Retrieval of Cloud Cover Parameters from MultispectralSatellite Images.” Journal of Climate Applied Meteorology 24: 322–333.
Baum, B. A., P. F. Soulen, K. I. Strabala, M. D. King, S. A. Akerman, W. P. Menzel, and P. Yang. 2000.“Remote Sensing of Cloud Properties Using MODIS Airbone Simulator Imagery DuringSUCCESS: 2. Cloud Thermodynamic Phase.” Journal of Geophysics Research 105: 11781–11792.
Bedka, K. M., and J. R. Mecikalski. 2005. “Application of Satellite-Derived Atmospheric MotionVectors for Estimating Mesoscale Flows.” Journal of Applied Meteorology, Notes andCorrespondence 44: 1761–1772.
Chylek, P., and C. Borel. 2004. “Mixed Phase Cloud Water/Ice Structure from High SpatialResolution Satellite Data.” Geophysical Research Letters 31: L14104.
International Journal of Remote Sensing 669
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014

Chylek, P., S. Robinson, M. K. Dubey, M. D. King, Q. Fu, and W. B. Clodius. 2006. “Comparisonof Near-Infrared and Thermal Infrared Cloud Phase Detections.” Journal of GeophysicsResearch 111: D20203.
Cotton, W. R., and R. A. Anthes, eds. 1989. Storm and Cloud Dynamics. San Diego, CA: AcademicPress.
Fujita, T. 1968. “Present Status of Cloud Velocity Computations from ATS-1 and ATS-3.” COSPAR.Space Research 9: 557–570.
Gosse, S., D. Labrie, and P. Chylek. 1995. “Refractive Index of Ice in the 1.4 to 7.8 µm SpectralRange.” Applied Optics 34: 6582–6586.
Hale, G., and M. Querry. 1973. “Optical Constants of Water in the 200 Nm to 200 µm WavelengthRegion.” Applied Optics 12: 555–563.
Hubert, L. F., and L. F. Whitney Jr. 1971. “Wind Estimation from Geostationary-Satellite Pictures.”Monthly Weather Review 99: 665–672.
Inoue, T. 1985. “On the Temperature and Effective Emissivity Determination of Semi-TransparentCirrus Clouds by Bi-Spectral Measurements in the 10 µm Window Region.” Journal of theMeteorological Society of Japan 63: 88–98.
Lean, H. W., P. A. Clark, M. Dixo, N. M. Roberts, A. Fitch, R. Forbes, and C. Halliwell. 2008.“Characteristics of High-Resolution Versions of the Met Office Unified Model for ForecastingConvection over the United Kingdom.” Monthly Weather Review 136: 3408–3424.
Machado, L. A. T., and H. Laurent. 2004. “The Convective System Area Expansion over Amazoniaand Its Relationships with Convective System Life Duration and High-Level Wind Divergence.”Monthly Weather Review 132 (3): 714–725.
Machado, L. A. T., W. B. Rossow, R. L. Guedes, and A. W. Walker. 1998. “Life Cycle Variations ofMesoscale Convective Systems over the Americas.” Monthly Weather Review 126: 1630–1654.
Mahfouf, J. F., and F. Rabier. 2000. “The ECMWF Operational Implementation of Four-Dimensional Variational Assimilation. II: Experimental Results with Improved Physics.”Quarterly Journal of the Royal Meteorological Society 126 (564): 1171–1190.
Menzel, P. W. 2001. “Cloud Tracking with Satellite Imagery: From the Pioneering Work of TedFujita to the Present.” Bulletin of American Meteorology Society 82 (1): 33–47.
Moncrieff, M. W., and M. J. Miller. 1976. “The Dynamics and Simulation of TropicalCumulonimbus and Squall Lines.” Quarterly Journal of the Royal Meteorological Society102: 373–394.
Negri, R. G., and L. A. T. Machado. 2008. “Cptec/Inpe Operational Goes-10 Atmospheric MotionVectors.” 9th International Winds Workshop, Annapolis, MA, April 14–18.
NERC (Natural Environment Research Council). 2008. “Cascade – Scale Interactions in the TropicalAtmosphere.” Ncas British Atmospheric Data Centre, May 2012, 2008. Accessed May 22, 2012.http://badc.nerc.ac.uk/view/badc.nerc.ac.uk__ATOM__dataent_12175812387925961
Pavolonis, M. J., W. F. Feltz, A. K. Heidinger, and G. M. Gallina. 2006. “A Daytime Complement tothe Reverse Absorption Technique for Improved Automated Detection of Volcanic Ash.”Journal Atmospheric Oceanic Technology 23: 1422–1444.
Pilewskie, P., and S. Twomey. 1987. “Discrimination of Ice from Water in Clouds by OpticalRemote Sensing.” Atmospheric Research 21: 113–122.
R9REP. 2010. “RTTOV-9 Science and Validation Report.” Accessed May 22, 2012. http://research.metoffice.gov.uk/research/interproj/nwpsaf/rtm/rttov9_files/rttov9_svr.pdf
Saunders, R. W., and K. T. Kriebel. 1988. “An Improved Method for Detecting Clear Sky andCloudy Radiances from AVHRR Data.” International Journal of Remote Sensing 9 (1):123–150.
Strabala, K. I., S. A. Ackerman, and P. Menzelw. 1994. “Cloud Properties Inferred from 8–12 µmData.” Journal of Applied Meteorological 33: 212–229.
Warren, S. 1984. “Optical Constants of Ice from the Ultraviolet to the Microwave.” Applied Optics23: 1206–1225.
Wolters, E. L. A., R. A. Roebeling, and A. J. Feijt. 2008. “Evaluation of Cloud-Phase RetrievalMethods for SEVIRI on Meteosat-8 Using Ground-Based Lidar and Cloud Radar Data.”Journal of Applied Meteorology and Climatology 47: 1723–1738.
670 R.G. Negri et al.
Dow
nloa
ded
by [
Inst
ituto
Nac
iona
l De
Pasq
uisa
s], [
Lui
z A
.T. M
acha
do]
at 0
8:23
23
Janu
ary
2014