Embed Size (px)
Citation preview
Semilinear parabolic partial differential equationsTheory, approximation, and applications
Stig Larsson
Chalmers University of Techology
Goteborg University
http://www.math.chalmers.se/˜stig
– p.1/65
Outline
Semilinear parabolic equation
Finite element method for elliptic equation
Finite element method for semilinear parabolic equation
Application to dynamical systems
Stochastic parabolic equation
Computer exercises with the software Puffin
– p.2/65

Lecture 1: Semilinear parabolic PDE
– p.3/65
Initial-boundary value problem
ut − ∆u = f(u), x ∈ Ω, t > 0,
u = 0, x ∈ ∂Ω, t > 0,
u(·, 0) = u0, x ∈ Ω,
(1)
Ω ⊂ Rd, d = 1, 2, 3, bounded convex polygonal domain
u = u(x, t) ∈ R, ut = ∂u/∂t,
∆u =dX
i=1
∂2u
∂x2i
f : R → R is twice continuously differentiable
|f (l)(ξ)| ≤ C(1 + |ξ|δ+1−l), ξ ∈ R, l = 1, 2, (2)
δ = 2 if d = 3, δ ∈ [1,∞) if d = 2.
– p.4/65
Example: Allen-Cahn equation
f(ξ) = −V ′(ξ)
V (ξ) =1
4ξ4 −
1
2ξ2
ut − ∆u = −(u3 − u)
– p.5/65
Sobolev spaces
Hilbert space H = L2(Ω), with standard norm and inner product
‖v‖ =“
Z
Ω|v|2 dx
”1/2, (v,w) =
Z
Ωv · w dx. (3)
Sobolev spaces Hm(Ω), m ≥ 0, norms denoted by
‖v‖m =
X
|α|≤m
‖Dαv‖2
!1/2
. (4)
Hilbert space V = H10 (Ω), with norm ‖·‖1, the functions in H1(Ω) that vanish on ∂Ω.
V ∗ = H−1(Ω) is the dual space of V with norm
‖v‖−1 = supχ∈V
|(v, χ)|
‖χ‖1. (5)
– p.6/65
Sobolev spaces
X,Y Banach spacesL(X,Y ) denotes the space of bounded linear operators from X into YL(X) = L(X,X)
BX (x,R) denotes the closed ball in X with center x and radius R.BR = BV (0, R) denote the the closed ball of radius R in V :
BR = v ∈ V : ‖v‖1 ≤ R.
We also use the notation
‖v‖L∞([0,T ],X) = supt∈[0,T ]
‖v(t)‖X .
– p.7/65
Abstract framework
unbounded operator A = −∆ on Hdomain of definition D(A) = H2(Ω) ∩H1
0 (Ω)
A is a closed, densely defined, and self-adjoint positive definite operator in H with compactinverse.nonlinear operator f : V → H defined by f(v)(x) = f(v(x))
The initial-boundary value problem (??) may then be formulated as an initial value problem inV : find u(t) ∈ V such that
u′ +Au = f(u), t > 0; u(0) = u0. (6)
Eigenvalue problem:
Aϕ = λϕ
0 < λ1 < λ2 ≤ λ3 ≤ · · · ≤ λj → ∞
orthonormal basis of eigenvectors ϕj∞j=1
– p.8/65
Abstract framework
The operator −A is the infinitesimal generator of the analytic semigroup E(t) = exp(−tA)
defined by
E(t)v =∞X
j=1
e−tλj (v, ϕj)ϕj , v ∈ H, (7)
The semigroup E(t) is the solution operator of the initial value problem for the homogeneousequation,
u′ +Au = 0, t > 0; u(0) = u0; u(t) = E(t)u0
By Duhamel’s principle: solutions of (??) satisfy
u(t) = E(t)u0 +
Z t
0E(t− s)f(u(s)) ds, t ≥ 0. (8)
Conversely, appropriately defined solutions of the nonlinear integral equation (??) aresolutions of the differential equation (??), see below. We shall mainly work with (??) anddiscretized variants of it.
– p.9/65

Fractional powers of A
‖Aαv‖ =“
∞X
j=1
“
λαj (v, ϕj)
”2”1/2, α ∈ R,
D(Aα) =n
v : ‖Aαv‖ <∞o
, α ∈ R.
(9)
elliptic regularity estimate
‖v‖2 ≤ C‖Av‖, v ∈ H2(Ω) ∩H10 (Ω), (10)
trace inequality
‖v‖L2(∂Ω) ≤ C‖v‖1, v ∈ H1(Ω),
D(Al/2) = Hl(Ω) ∩H10 (Ω), l = 1, 2, with the equivalence of norms
c‖v‖l ≤ ‖Al/2v‖ ≤ C‖v‖l, v ∈ D(Al/2), l = 1, 2; (11)
D(A−1/2) = H−1(Ω)
c‖v‖−1 ≤ ‖A−1/2v‖ ≤ C‖v‖−1; (12)
– p.10/65
Analytic semigroup
E(t)v =∞X
j=1
e−tλj (v, ϕj)ϕj , v ∈ H,
u(t) = E(t)v is the solution of
u′ +Au = 0; u(0) = v
Smoothing property (Dt = ∂/∂t):
‖DltE(t)v‖ = ‖AlE(t)v‖ ≤ Clt
−l‖v‖, t > 0, v ∈ H, l ≥ 0. (13)
‖DltE(t)v‖β ≤ Clt
−l−(β−α)/2‖v‖α, t > 0, v ∈ D(Aα/2),
− 1 ≤ α ≤ β ≤ 2, l = 0, 1.(14)
– p.11/65
Local Lipschitz condition
f : V → H nonlinear mappingf ′ : V → L(V,H) Fréchet derivativegrowth assumption:
|f (l)(ξ)| ≤ C(1 + |ξ|δ+1−l), ξ ∈ R, l = 1, 2, (15)
δ = 2 if d = 3, δ ∈ [1,∞) if d = 2.Sobolev’s inequality
‖v‖Lp≤ C‖v‖1, (16)
p = 6 if d ≤ 3, p <∞ if d = 2, p = ∞ if d = 1
Hölder’s inequality
‖vδw‖Lr≤ ‖v‖δ
Lq‖w‖Lp
, δq
+ 1p
= 1r, δ > 0. (17)
– p.12/65
Local Lipschitz condition
f : V → H nonlinear mappingf ′ : V → L(V,H) Fréchet derivative
Lemma For each nonnegative number R there is a constant C(R) such that, for allu, v ∈ BR ⊂ V ,
‖f ′(u)‖L(V,H) ≤ C(R) (18)
‖f ′(u)‖L(H,V ∗) ≤ C(R) (19)
‖f(u) − f(v)‖ ≤ C(R)‖u− v‖1 (20)
‖f(u) − f(v)‖−1 ≤ C(R)‖u− v‖ (21)
– p.13/65
Proof
By (??) and the Hölder and Sobolev inequalities, for z ∈ V = H10 (Ω),
‖f ′(u)z‖L2≤ C‖(1 + |u|δ)z‖L2
≤ C`
1 + ‖u‖δLq
´
‖z‖Lp
≤ C`
1 + ‖u‖δ1
´
‖z‖1,
where 1p
+ δq
= 12
with p = q = 6 if d = 3, and with arbitrary p ∈ (1,∞) if d ≤ 2. This proves(??) and (??) follows.Moreover, for any z, χ ∈ V ,
(f ′(u)z, χ) ≤ C`
1 + ‖u‖δLq
´
‖z‖L2‖χ‖Lp
≤ C`
1 + ‖u‖δ1
´
‖z‖ ‖χ‖1,
where δq
+ 12
+ 1p
= 1, i.e., with the same p and q as before. This proves (??) and (??) follows.
– p.14/65
Local existence
Theorem. For any R0 > 0 there is τ = τ(R0) such that (??) has a unique solutionu ∈ C([0, τ ], V ) for any initial value u0 ∈ V with ‖u0‖1 ≤ R0. Moreover, there is c such that‖u‖L∞([0,τ ],V ) ≤ cR0.
– p.15/65
Proof
Let u0 ∈ BR0, define
S(u)(t) = E(t)u0 +
Z t
0E(t− s)f(u(s)) ds,
and note that (??) is a fixed point equation u = S(u). We shall choose τ and R such that wecan apply Banach’s fixed point theorem (the contraction mapping theorem) in the closed ball
B = u ∈ C([0, τ ], V ) : ‖u‖L∞([0,τ ],V ) ≤ R
in the Banach space C([0, τ ], V ).We must show (i) that S maps B into itself, (ii) that S is a contraction on B. In order to prove(i) we take u ∈ B and first note that the Lipschitz condition (??) implies that
‖f(u(t))‖ ≤ ‖f(0)‖ + ‖f(u(t)) − f(0)‖
≤ ‖f(0)‖ + C(R)‖u(t)‖1
≤ ‖f(0)‖ + C(R)R, 0 ≤ t ≤ τ.
(22)
– p.16/65
Proof, cont’d
Hence, using also (??), we get
‖S(u)(t)‖1 ≤ ‖E(t)u0‖1 +
Z t
0‖E(t− s)f(u(s))‖1 ds
≤ c0‖u0‖1 + c1
Z t
0(t− s)−1/2‖f(u(s))‖ ds
≤ c0R0 + 2c1τ1/2`
‖f(0)‖ + C(R)R´
, 0 ≤ t ≤ τ.
This implies
‖S(u)‖L∞([0,τ ],V ) ≤ c0R0 + 2c1τ1/2`
‖f(0)‖ + C(R)R´
.
Choose R = 2c0R0 and τ = τ(R0) so small that
2c1τ1/2`
‖f(0)‖ + C(R)R´
≤ 12R. (23)
Then ‖S(u)‖L∞([0,τ ],V ) ≤ R and we conclude that S maps B into itself.
– p.17/65
Proof, cont’d
To show (ii) we take u, v ∈ B and note that
‖f(u(t)) − f(v(t))‖ ≤ C(R)‖u− v‖L∞([0,τ ],V ), 0 ≤ t ≤ τ.
Hence
‖S(u)(t) − S(v(t))‖1 ≤
Z t
0‖E(t− s)(f(u(s)) − f(v(s)))‖1 ds
≤ c1
Z t
0(t− s)−1/2‖f(u(s)) − f(v(s))‖ ds
≤ 2c1τ1/2C(R)‖u− v‖L∞([0,τ ],V ), 0 ≤ t ≤ τ,
so that
‖S(u) − S(v)‖L∞([0,τ ],V ) ≤ 2c1τ1/2C(R)‖u− v‖L∞([0,τ ],V ).
It follows from (??) that 2c1τ1/2C(R) ≤ 12
and we conclude that S is a contraction on B.
Hence S has a unique fixed point u ∈ B.
– p.18/65
Nonlinear semigroup
The initial value problem thus has a unique local solution for any initial datum u0 ∈ V .We denote by
S(t, ·) : V → V
the corresponding solution operator, so that u(t) = S(t, u0) is the solution of
u(t) = E(t)u0 +
Z t
0E(t− s)f(u(s)) ds, t ≥ 0. (24)
– p.19/65
Regularity
This will be used in our error analysis, but the theorem also shows that u′(t) ∈ H andAu(t) ∈ H for t > 0, so that any solution of the integral equation (??) is also a solution of thedifferential equation (??).THEOREM Let R ≥ 0 and τ > 0 be given and let u ∈ C([0, τ ], V ) be a solution. If‖u(t)‖1 ≤ R for t ∈ [0, τ ], then
‖u(t)‖2 ≤ C(R, τ)t−1/2, t ∈ (0, τ ], (25)
‖ut(t)‖s ≤ C(R, τ)t−1−(s−1)/2, t ∈ (0, τ ], s = 0, 1, 2. (26)
Proof will be provided in the notes.
– p.20/65
Global existence
Assume we can provide a global a priori bound: there is R such that if u ∈ C([0, T ], V ) is asolution then
‖u(t)‖1 ≤ R, t ∈ [0, T ]
Repeated application of the local existence theorem with τ = τ(R) then proves existence fort ∈ [0, T ].
– p.21/65
Example: Allen-Cahn equation
ut − ∆u = −(u3 − u) = −V ′(u)
V (ξ) =1
4ξ4 −
1
2ξ2 bounded from below: V (ξ) ≥ −K
(ut, ut) − (∆u, ut) = −(V ′(u), ut)
(ut, ut) + (∇u,∇ut) = −(V ′(u), ut)
‖ut‖2 +
1
2Dt‖∇u‖
2 = −Dt
Z
ΩV (u) dx
Z t
0‖ut‖
2 ds+1
2‖∇u(t)‖2 =
1
2‖∇u0‖
2 −
Z
ΩV (u(t)) dx+
Z
ΩV (u0) dx ≤ C
We conclude‖u(t)‖1 ≤ R, t ∈ [0,∞)
– p.22/65

Lecture 2: Finite element method
– p.23/65
Elliptic equation
Let Ω be a convex polygonal domain in R2
Au := −∇ ·`
a∇u´
= f x ∈ Ω
u = 0 x ∈ ∂Ω
a = a(x) is smooth with a(x) ≥ a0 > 0 in Ω and f ∈ L2
Weak formulation: find u ∈ V = H10 such that
a(u, v) = (f, v), ∀v ∈ V = H10
where
a(v,w) =
Z
Ωa∇v · ∇w dx and (f, v) =
Z
Ωfv dx
– p.24/65
Elliptic equation
Poincaré’s inequality
‖v‖ ≤ C‖∇v‖ ∀v ∈ V
implies
c‖v‖21 ≤ a0‖∇v‖
2 ≤ a(v, v) ≤ C‖v‖21 ∀v ∈ V
so a(·, ·) is a scalar product and the norm ‖v‖a =p
a(v, v) is equivalent to the standardnorm on V . Hence there is a unique solution in u ∈ V .
Ω is convex: u ∈ H2 and
‖u‖2 ≤ C‖f‖.
– p.25/65
Finite element
K a set of closed triangles K, a triangulation, such that
Ω =[
K∈Th
K, hK = diam(K), h = maxK∈Th
hK .
Piecewise linear functions:
Vh =˘
v ∈ C(Ω) : v linear in K for each K, v = 0 on ∂Ω¯
Vh ⊂ V = H10
PiMhi=1 the set of interior nodes
v ∈ Vh is uniquely determined by its values at the Pj
pyramid functions ΦiMhi=1 ⊂ Vh, defined by
Φi(Pj) =
8
<
:
1, if i = j,
0, if i 6= j,
forms a basis for Vh, v(x) =PMh
i=1 viΦi(x), where vi = v(Pi).
– p.26/65
Finite element method
The finite element equation: find uh ∈ Vh such that
a(uh, χ) = (f, χ), ∀χ ∈ Vh
Use basis:
uh(x) =
MhX
i=1
UiΦi(x)
MhX
j=1
Uja(Φj ,Φi) = (f,Φi), i = 1, . . . ,Mh,
Matrix form: AU = b, where U = (Ui), A = (aij) is the stiffness matrix with elementsaij = a(Φj ,Φi), and b = (bi) the load vector with elements bi = (f,Φi).
A is symmetric and positive definite, large and sparse.
– p.27/65
Approximation theory
Interpolation operator Ih : C(Ω) → Vh defined by
(Ihv)(x) =
MhX
i=1
viΦi(x), vi = v(Pi)
Thus
(Ihv)(Pi) = v(Pi), i = 1, . . . ,Mh
Interpolation error estimates:
‖Ihv − v‖ ≤ Ch2‖v‖2, ∀v ∈ H2 ∩ V
‖Ihv − v‖1 ≤ Ch‖v‖2, ∀v ∈ H2 ∩ V
– p.28/65
Error estimate in H1 norm
Error uh − u.
Energy norm:
‖v‖a = a(v, v)1/2 =“
Z
Ωa|∇v|2 dx
”1/2.
Standard norm:
‖v‖1 =“
‖v‖2 + ‖∇v‖2”1/2
Theorem
‖uh − u‖a = minχ∈Vh
‖χ− u‖a,
‖uh − u‖1 ≤ Ch‖u‖2.
– p.29/65
Proof
u ∈ V ; a(u, v) = (f, v), ∀v ∈ V
uh ∈ Vh; a(uh, χ) = (f, χ), ∀χ ∈ Vh
Vh ⊂ V , take v = χ ∈ Vh and subtract
a(uh − u, χ) = 0, ∀χ ∈ Vh,
uh is the orthogonal projection of u onto Vh with respect to the inner product a(·, ·)
‖uh − u‖a = minχ∈Vh
‖χ− u‖a,
Equivalence of norms and interpolation error estimate:
‖uh − u‖1 ≤ C‖uh − u‖a ≤ C‖Ihu− u‖a ≤ C‖Ihu− u‖1 ≤ Ch‖u‖2.
– p.30/65
Error estimate in L2 norm
Theorem
‖uh − u‖ ≤ Ch2‖u‖2.
– p.31/65
Proof
Duality argument based on the auxiliary problem (where e = uh − u)
Aφ = e in Ω,
φ = 0 on ∂Ω
Weak formulation: find φ ∈ H10 such that
a(w,φ) = (w, e), ∀w ∈ H10 .
Regularity estimate: ‖φ‖2 ≤ C‖Aφ‖ = C‖e‖
Take w = e ∈ H10
‖e‖2 = a(e, φ) = a(e, φ− Ihφ) ≤ C‖e‖1 ‖φ− Ihφ‖1
≤ Ch‖e‖1 ‖φ‖2 ≤ Ch‖e‖1 ‖e‖.
‖e‖ ≤ Ch‖e‖1 ≤ Ch2‖u‖2
– p.32/65
Ritz projection
Recall Vh ⊂ V and
a(uh − u, χ) = 0, ∀χ ∈ Vh
uh is the orthogonal projection of u onto Vh with respect to the inner product a(·, ·)
We denote it by Rh : V → Vh. It satisfies
a(Rhu− u, χ) = 0, ∀χ ∈ Vh
With this notation the error estimates are:
‖Rhv − v‖ ≤ Ch2‖v‖2, ‖Rhv − v‖1 ≤ Ch‖v‖2, ∀v ∈ H2 ∩H10
Also:
‖Rhv − v‖ ≤ Ch‖v‖1, ∀v ∈ H10
– p.33/65
Lecture 3: Finite elements for semilinear parabolic PDE
– p.34/65
Abstract framework
Find u(t) ∈ V such that
u′ +Au = f(u), t > 0; u(0) = u0.
Linear homogenous equation:
u′ +Au = 0, t > 0; u(0) = u0; u(t) = E(t)u0
By Duhamel’s principle:
u(t) = E(t)u0 +
Z t
0E(t− s)f(u(s)) ds, t ≥ 0.
– p.35/65
Local existence and regularity
THEOREM For any R0 > 0 there is τ = τ(R0) such that there is a unique solutionu ∈ C([0, τ ], V ) for any initial value u0 ∈ V with ‖u0‖1 ≤ R0. Moreover, there is c such that‖u‖L∞([0,τ ],V ) ≤ cR0.
THEOREM Let R ≥ 0 and τ > 0 be given and let u ∈ C([0, τ ], V ) be a solution. If‖u(t)‖1 ≤ R for t ∈ [0, τ ], then
‖u(t)‖2 ≤ C(R, τ)t−1/2, t ∈ (0, τ ],
‖ut(t)‖s ≤ C(R, τ)t−1−(s−1)/2, t ∈ (0, τ ], s = 0, 1, 2.
Global solution on [0, T ] if we can prove a priori bound
‖u(t)‖1 ≤ R, t ∈ [0, T ]
– p.36/65
Finite element method
Linear elliptic equation:−∇ ·
`
a∇u´
= f x ∈ Ω
u = 0 x ∈ ∂Ω
Weak formulation: find u ∈ V = H10 such that
a(u, v) = (f, v), ∀v ∈ V = H10
where
a(v,w) =
Z
Ωa∇v · ∇w dx and (f, v) =
Z
Ωfv dx
The finite element equation: find uh ∈ Vh such that
a(uh, χ) = (f, χ), ∀χ ∈ Vh
– p.37/65
Error estimates
‖uh − u‖1 ≤ Ch‖u‖2
‖uh − u‖ ≤ Ch2‖u‖2
– p.38/65
Ritz projection
Recall Vh ⊂ V and
a(uh − u, χ) = 0, ∀χ ∈ Vh
uh is the orthogonal projection of u onto Vh with respect to the inner product a(·, ·)
We denote it by Rh : V → Vh. It satisfies
a(Rhu− u, χ) = 0, ∀χ ∈ Vh
With this notation the error estimates are:
‖Rhv − v‖ ≤ Ch2‖v‖2, ‖Rhv − v‖1 ≤ Ch‖v‖2, ∀v ∈ H2 ∩H10
Also:
‖Rhv − v‖ ≤ Ch‖v‖1, ∀v ∈ H10
– p.39/65
Spatially semidiscrete approximation
u′ +Au = f(u), t > 0; u(0) = u0.
The weak formulation: find u(t) ∈ V such that
(u′, v) + a(u, v) = (f(u), v), ∀v ∈ V, t > 0,
u(0) = u0,(27)
where a(u, v) = (∇u,∇v) = (−∆u, v) = (Au, v) is the bilinear form associated with A.
Finite element spaces: Vh ⊂ V
Spatially semidiscrete finite element equation: find uh(t) ∈ Vh such that
(u′h, χ) + a(uh, χ) = (f(uh), χ), ∀χ ∈ Vh, t > 0,
uh(0) = uh,0,(28)
where uh,0 ∈ Vh is an approximation of u0.
– p.40/65
Abstract framework
Linear operator Ah : Vh → Vh
Orthogonal projection Ph : H → Vh
(Ahψ, χ) = a(ψ,χ), (Phg, χ) = (g, χ) ∀ψ, χ ∈ Vh, g ∈ H,
Finite element equation becomes:
u′h +Ahuh = Phf(uh), t > 0; uh(0) = uh,0.
Ah is self-adjoint positive definite (uniformly in h);The Corresponding semigroup Eh(t) = exp(−tAh) : Vh → Vh
therefore has the smoothing properties (uniformly in h):
‖DltEh(t)v‖ = ‖Al
hEh(t)v‖ ≤ Clt−l‖v‖, t > 0, v ∈ Vh, l ≥ 0.
Moreover, for the operator Ah we have the equivalence of norms
c‖v‖1 ≤ ‖A1/2h v‖ =
p
a(v, v) = ‖A1/2v‖ ≤ C‖v‖1, v ∈ Vh.
– p.41/65
Abstract formulation
‖A1/2h v‖ controls ‖v‖1 and ‖v‖1 controls the Lipschitz constant of f .
We also have
‖Phf‖ ≤ ‖f‖, f ∈ H,
and
‖A−1/2h Phf‖ ≤ C‖f‖−1, f ∈ H, (29)
which follows from
‖A−1/2h Phf‖ = sup
vh∈Vh
|(A−1/2h Phf, vh)|
‖vh‖= sup
vh∈Vh
|(f,A−1/2h vh)|
‖vh‖
= supwh∈Vh
|(f,wh)|
‖A1/2h wh‖
≤ C supwh∈Vh
|(f,wh)|
‖wh‖1
≤ C supw∈V
|(f,w)|
‖w‖1= C‖f‖−1.
– p.42/65
Abstract formulation
Using these inequalities we prove:
‖DltEh(t)Phf‖β ≤ Ct−l−(β−α)/2‖f‖α, t > 0, f ∈ D(Aα/2),
− 1 ≤ α ≤ β ≤ 1, l = 0, 1.
Note that the upper limit to β is 1, while it is 2 in the continuous case.
– p.43/65
Local existence
The initial-value problem is equivalent to the integral equation
uh(t) = Eh(t)uh,0 +
Z t
0Eh(t− s)Phf(uh(s)) ds, t ≥ 0.
The proof of the previous local existence theorem carries over verbatim to the semidiscretecase. We thus have:
THEOREM For any R0 > 0 there is τ = τ(R0) such that there is a unique solutionuh ∈ C([0, τ ], V ) for any initial value uh,0 ∈ Vh with ‖uh,0‖1 ≤ R0. Moreover, there is csuch that ‖uh‖L∞([0,τ ],V ) ≤ cR0.
We denote by Sh(t, ·) the corresponding (local) solution operator, so thatuh(t) = Sh(t, uh,0) is the solution.
– p.44/65
Local a priori error estimate
Next goal: estimate the difference between the local solutions u(t) = S(t, u0) anduh(t) = Sh(t, uh,0)
THEOREM Let R ≥ 0 and τ > 0 be given. Let u(t) and uh(t) be solutions of (??) and (??)
respectively, such that u(t), uh(t) ∈ BR for t ∈ [0, τ ]. Then
‖uh(t) − u(t)‖1 ≤ C(R, τ)t−1/2`
‖uh,0 − Phu0‖ + h´
, t ∈ (0, τ ],
‖uh(t) − u(t)‖ ≤ C(R, τ)`
‖uh,0 − Phu0‖ + h2t−1/2´
, t ∈ (0, τ ].
Local: because the constant C(R, τ) grows with τ and R.A priori: because the error is evaluated in terms of derivatives of u, which are estimated apriori in a previous regularity theorem.
– p.45/65
Proof
Recall the Ritz projection operator Rh : V → Vh defined by
a(Rhv, χ) = a(v, χ), ∀χ ∈ Vh.
with error bounds
‖Rhv − v‖ + h‖Rhv − v‖1 ≤ Chs‖v‖s, v ∈ V ∩Hs(Ω), s = 1, 2
We divide the error into two parts:
e(t) ≡ uh(t) − u(t) =`
uh(t) −Rhu(t)´
+`
Rhu(t) − u(t)´
≡ θ(t) + ρ(t).
Then, for j = 0, 1 and s = 1, 2,
‖ρ(t)‖j ≤ Chs−j‖u(t)‖s ≤ C(R, τ)hs−jt−(s−1)/2, t ∈ (0, τ ],
‖ρt(t)‖ ≤ Chs‖ut(t)‖s ≤ C(R, τ)ht−1−(s−1)/2, t ∈ (0, τ ].
– p.46/65
Proof
It remains to estimate θ(t) ∈ Vh. It satisfies, for χ ∈ Vh,
(θt, χ) + a(θ, χ) = (uh,t, χ) + a(uh, χ) − (Rhut, χ) − a(Rhu,χ)
= (uh,t, χ) + a(uh, χ) − (Rhut, χ) − a(u, χ)
= (f(uh) − f(u), χ) − (Rhut − ut, χ)
= (f(uh) − f(u), χ) − (ρt, χ)
equivalently
θt +Ahθ = Ph
`
f(uh) − f(u) − ρt´
(30)
Hence, by Duhamel’s principle,
θ(t) = Eh(t)θ(0) +
Z t
0Eh(t− σ)Ph
“
f(uh(σ)) − f(u(σ)) −Dσρ(σ)”
dσ
– p.47/65
Proof
Integration by parts yields
−
Z t/2
0Eh(t− σ)PhDσρ(σ) dσ = Eh(t)Phρ(0) −Eh(t/2)Phρ(t/2)
+
Z t/2
0
`
DσEh(t− σ)´
Phρ(σ) dσ.
Hence
θ(t) = Eh(t)Phe(0) − Eh(t/2)Phρ(t/2) +
Z t/2
0
`
DσEh(t− σ)´
Phρ(σ) dσ
−
Z t
t/2Eh(t− σ)PhDσρ(σ) dσ +
Z t
0Eh(t− σ)Ph
“
f(uh(σ)) − f(u(σ))”
dσ.
– p.48/65
Proof
Using the smoothing property of Eh(t)Ph, the error estimates for ρ with j = 0, s = 1, andthe Lipschitz condition ‖f(u) − f(v)‖ ≤ C(R)‖u− v‖1, we obtain
‖θ(t)‖1 ≤ Ct−1/2`
‖Phe(0)‖ + ‖ρ(t/2)‖´
+ C
Z t/2
0(t− σ)−3/2‖ρ(σ)‖ dσ
+ C
Z t
t/2(t− σ)−1/2‖Dσρ(σ)‖ dσ
+ C
Z t
0(t− σ)−1/2‖f(uh(σ)) − f(u(σ))‖ dσ
≤ C(R, τ)t−1/2`
‖Phe(0)‖ + h´
+ C(R, τ)h
„Z t/2
0(t− σ)−3/2 dσ +
Z t
t/2(t− σ)−1/2σ−1 dσ
«
+ C(R)
Z t
0(t− σ)−1/2‖e(σ)‖1 dσ
≤ C(R, τ)t−1/2`
‖Phe(0)‖ + h´
+ C(R)
Z t
0(t− σ)−1/2‖e(σ)‖1 dσ,
for t ∈ (0, τ ].
– p.49/65
Proof
Since e = θ + ρ this yields
‖e(t)‖1 ≤ C(R, τ)t−1/2`
‖Phe(0)‖ + h´
+ C(R)
Z t
0(t− σ)−1/2‖e(σ)‖1 dσ, t ∈ (0, τ ],
and we use the generalized Gronwall lemma. This proves the H1-estimate, becausePhe(0) = uh,0 − Phu0.
To prove the L2 estimate we use the Lipschitz condition ‖f(u) − f(v)‖−1 ≤ C(R)‖u− v‖
instead.
– p.50/65
Generalized Gronwall lemma
Lemma Let the function ϕ(t, τ) ≥ 0 be continuous for 0 ≤ τ < t ≤ T . If
ϕ(t, τ) ≤ A (t− τ)−1+α + B
Z t
τ(t− s)−1+βϕ(s, τ) ds, 0 ≤ τ < t ≤ T,
for some constants A,B ≥ 0, α, β > 0, then there is a constant C = C(B,T, α, β) such that
ϕ(t, τ) ≤ CA (t− τ)−1+α, 0 ≤ τ < t ≤ T.
The constant in Gronwall’s lemma grows exponentially with the length T of the time interval.Hence, results derived by means of this lemma are often useful only for short time intervals.
– p.51/65
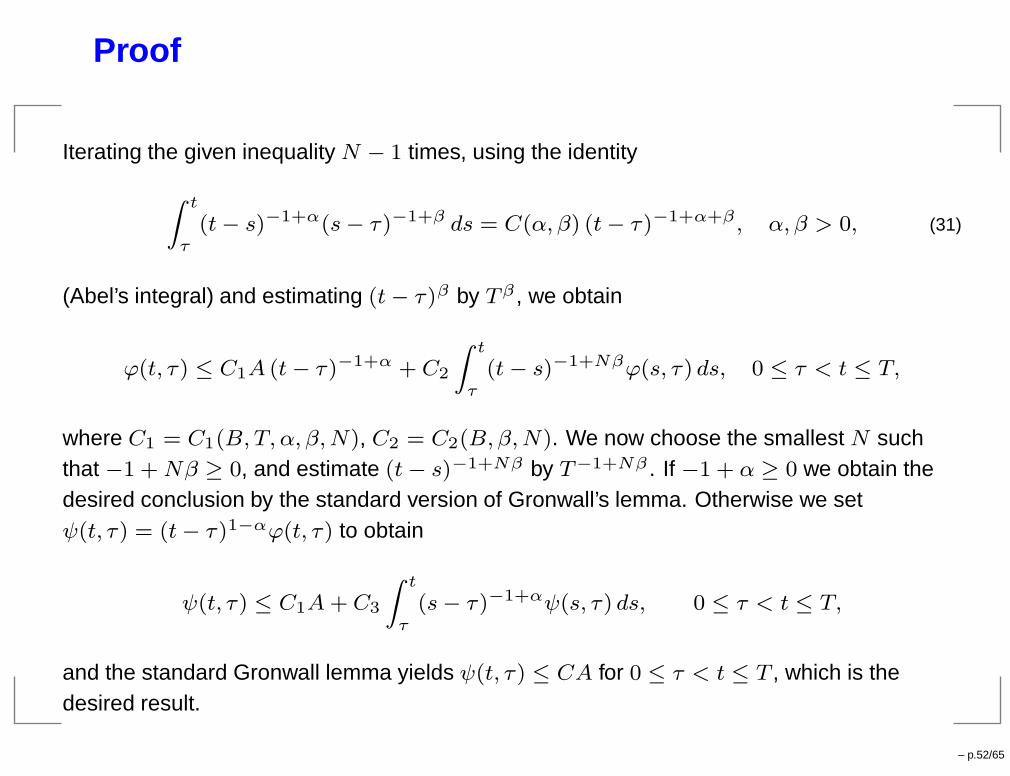
Proof
Iterating the given inequality N − 1 times, using the identity
Z t
τ(t− s)−1+α(s− τ)−1+β ds = C(α, β) (t− τ)−1+α+β , α, β > 0, (31)
(Abel’s integral) and estimating (t− τ)β by Tβ , we obtain
ϕ(t, τ) ≤ C1A (t− τ)−1+α + C2
Z t
τ(t− s)−1+Nβϕ(s, τ) ds, 0 ≤ τ < t ≤ T,
where C1 = C1(B,T, α, β,N), C2 = C2(B, β,N). We now choose the smallest N suchthat −1 +Nβ ≥ 0, and estimate (t− s)−1+Nβ by T−1+Nβ . If −1 + α ≥ 0 we obtain thedesired conclusion by the standard version of Gronwall’s lemma. Otherwise we setψ(t, τ) = (t− τ)1−αϕ(t, τ) to obtain
ψ(t, τ) ≤ C1A+ C3
Z t
τ(s− τ)−1+αψ(s, τ) ds, 0 ≤ τ < t ≤ T,
and the standard Gronwall lemma yields ψ(t, τ) ≤ CA for 0 ≤ τ < t ≤ T , which is thedesired result.
– p.52/65
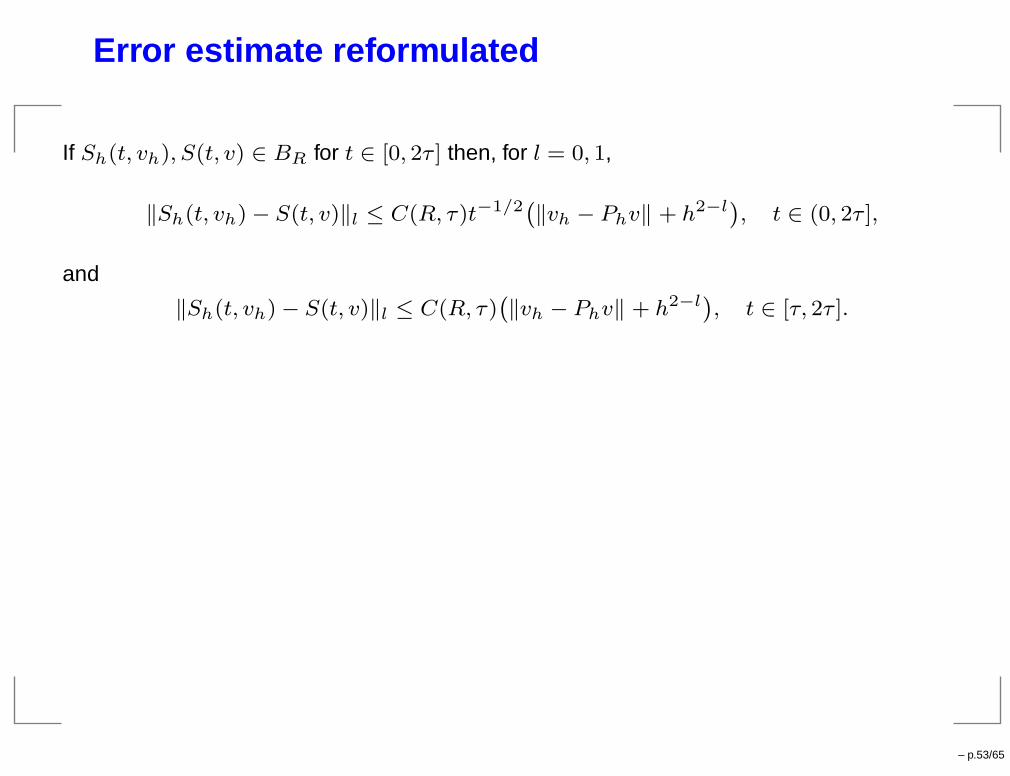
Error estimate reformulated
If Sh(t, vh), S(t, v) ∈ BR for t ∈ [0, 2τ ] then, for l = 0, 1,
‖Sh(t, vh) − S(t, v)‖l ≤ C(R, τ)t−1/2`
‖vh − Phv‖ + h2−l´
, t ∈ (0, 2τ ],
and
‖Sh(t, vh) − S(t, v)‖l ≤ C(R, τ)`
‖vh − Phv‖ + h2−l´
, t ∈ [τ, 2τ ].
– p.53/65
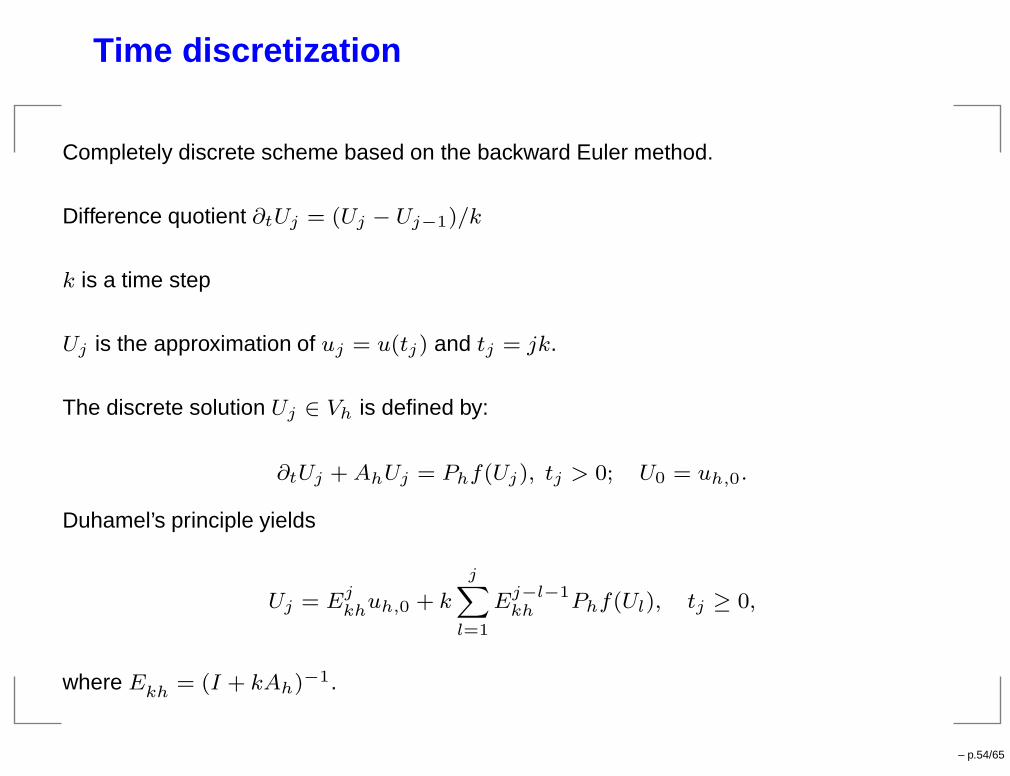
Time discretization
Completely discrete scheme based on the backward Euler method.
Difference quotient ∂tUj = (Uj − Uj−1)/k
k is a time step
Uj is the approximation of uj = u(tj) and tj = jk.
The discrete solution Uj ∈ Vh is defined by:
∂tUj +AhUj = Phf(Uj), tj > 0; U0 = uh,0.
Duhamel’s principle yields
Uj = Ejkhuh,0 + k
jX
l=1
Ej−l−1kh Phf(Ul), tj ≥ 0,
where Ekh = (I + kAh)−1.
– p.54/65
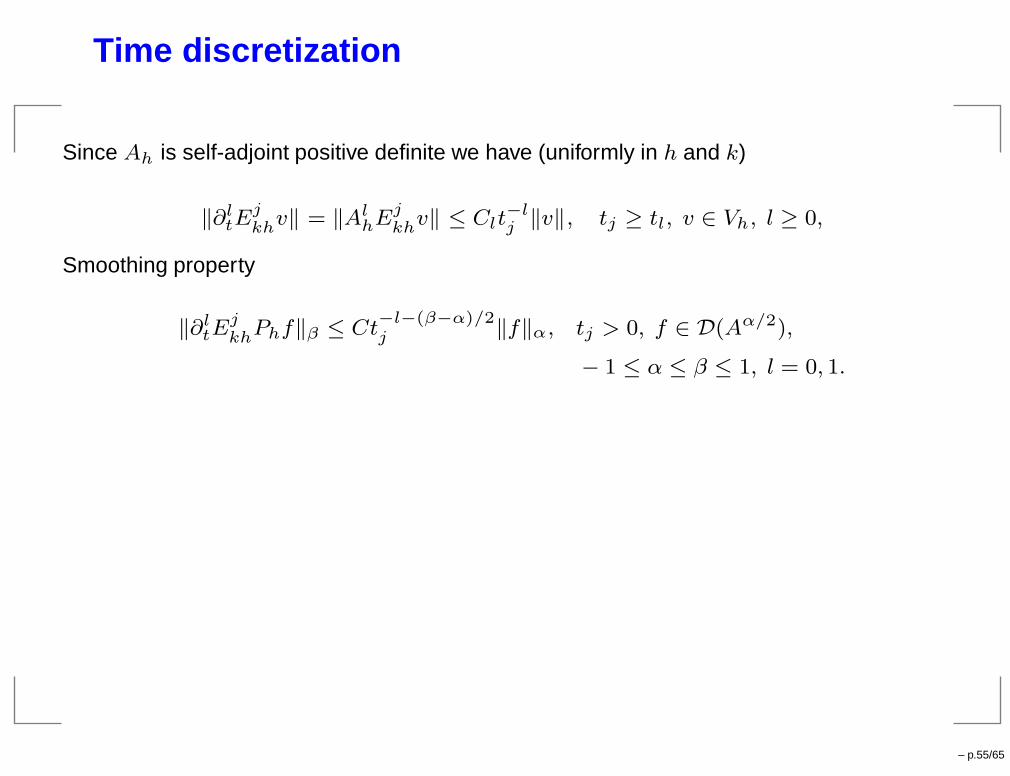
Time discretization
Since Ah is self-adjoint positive definite we have (uniformly in h and k)
‖∂ltE
jkhv‖ = ‖Al
hEjkhv‖ ≤ Clt
−lj ‖v‖, tj ≥ tl, v ∈ Vh, l ≥ 0,
Smoothing property
‖∂ltE
jkhPhf‖β ≤ Ct
−l−(β−α)/2j ‖f‖α, tj > 0, f ∈ D(Aα/2),
− 1 ≤ α ≤ β ≤ 1, l = 0, 1.
– p.55/65
Local existence and error estimates
THEOREM
For any R0 > 0 there is τ = τ(R0) such that there is a unique solution Uj , tj ∈ [0, τ ], forany initial value uh,0 ∈ Vh with ‖uh,0‖1 ≤ R0. Moreover, there is c such thatmaxtj∈[0,τ ] ‖Uj‖1 ≤ cR0.
THEOREM
Let R ≥ 0 and τ > 0 be given. Let u(t) and Uj be continuous and discrete solutions, suchthat u(t), Uj ∈ BR for t, tj ∈ [0, τ ]. Then, for k ≤ k0(R), we have
‖Uj − u(tj)‖1 ≤ C(R, τ)`
‖uh,0 − Phu0‖t−1/2j + ht
−1/2j + kt−1
j
´
, tj ∈ (0, τ ],
‖Uj − u(tj)‖ ≤ C(R, τ)`
‖uh,0 − Phu0‖ + h2t−1/2j + kt
−1/2j
´
, tj ∈ (0, τ ].
– p.56/65
Lecture 4: Application to dynamical systems theory
– p.57/65
Dynamical systems
Nonlinear semigroups:
S(t, ·) : V → V
and
Sh(t, ·) : Vh → Vh
u(t) = S(t, v) is the solution of
u′ + Au = f(u), t > 0; u(0) = v (32)
uh(t) = Sh(t, vh) is the solution of
u′h + Ahuh = Phf(uh), t > 0; uh(0) = vh (33)
Assume that they are defined for all t ∈ [0,∞).
– p.58/65
Global attractor
We assume that S(t, ·) has a global attractor A, i.e., A is a compact invariant subset of V ,which attracts the bounded sets of V . Thus, for any bounded set B ⊂ V and any ε > 0 thereis T > 0 such that
S(t,B) ⊂ N (A, ε), t ∈ [T,∞),
where N (A, ε) denotes the ε-neighborhood of A in V . Or equivalently,
δ(S(t, B),A) → 0 as t→ ∞,
where δ(A,B) = supa∈A infb∈B ‖a− b‖1
denotes the unsymmetric semidistance between two subsets A,B of V .Assume that Sh(t, ·) has a global attractor Ah in Vh.
THEOREM δ(Ah,A) → 0 as h→ 0.
In other words: for any ε > 0 there is h0 > 0 such that Ah ⊂ N (A, ε) if h < h0.
Ah is upper semicontinuous at h = 0.
– p.59/65
Recall: Error estimate reformulated
THEOREM
If Sh(t, vh), S(t, v) ∈ BR for t ∈ [0, 2τ ] then, for l = 0, 1,
‖Sh(t, vh) − S(t, v)‖l ≤ C(R, τ)t−1/2`
‖vh − Phv‖ + h2−l´
, t ∈ (0, 2τ ],
and
‖Sh(t, vh) − S(t, v)‖l ≤ C(R, τ)`
‖vh − Phv‖ + h2−l´
, t ∈ [τ, 2τ ].
– p.60/65
Exponential stability
Let u(t) = S(t, u0).
v is a perturbed solution starting at t0,if v(t) = S(t− t0, v0), t ≥ t0, with v0 near u(t0).
u is exponentially stable, if there are numbers δ, T > 0 such that any perturbed solutionv(t) = S(t− t0, v0) with ‖v0 − u(t0)‖1 < δ satisfies
‖v(t) − u(t)‖1 ≤ 12‖v0 − u(t0)‖1, t ∈ [t0 + T,∞).
Under this assumption we may prove a uniform long-time error estimate.
‖uh(t) − u(t)‖1 ≤ C`
1 + t−1/2´
h, t ∈ [0,∞)
– p.61/65
Linearization
Let u ∈ C([0, T ], V ) be a solution with ‖u(t)‖1 ≤ R, t ∈ [0, T ], for some T and R.
we rewrite the differential equation
u′ +Au+B(t)u = F (t, u),
whereB(t) = −f ′(u(t)) ∈ L(V,H),
F (t, v) = f(v) − f ′(u(t))v.
Linearized homogeneous problem:
v′ +Av + B(t)v = 0, t > s; v(s) = φ (34)
v(t) = L(t, s)φ is the solution.
– p.62/65
Expononential dichotomy
We assume that the linear evolution operator L(t, s) has an exponential dichotomy in V onthe interval J = [0, T ].
There are projections P (t) ∈ L(V ), t ∈ J ,and constants M ≥ 1, β > 0
such that, for s, t ∈ J , t ≥ s.
1. L(t, s)P (s) = P (t)L(t, s).
2. The restriction L(t, s)|R(I−P (s)) : R(I − P (s)) → R(I − P (t)) is an isomorphism.We define L(s, t) : R(I − P (t)) → R(I − P (s)) to be its inverse.
3. ‖L(t, s)P (s)‖L(X) ≤Me−β(t−s).
4. ‖L(s, t)(I − P (t))‖L(X) ≤Me−β(t−s).
– p.63/65
Shadowing
THEOREM
Let u ∈ C([0, T ], V ) be a solution of with
maxt∈[0,T ]
‖u(t)‖1 ≤ R,
for some T and R.Assume that the solution operator L(t, s) of the linearized problem has an exponentialdichotomy in V on the interval [0, T ]. Then there are numbers ρ0 and C such that, for eachsolution uh(t) = Sh(t, uh,0), t ∈ [0, T ], with
maxt∈[0,T ]
‖uh(t) − u(t)‖1 ≤ ρ0,
there is a solution u such that
‖uh(t) − u(t)‖1 ≤ C`
1 + t−1/2´
h, t ∈ (0, T ].
The numerical solution uh is shadowed by an exact solution u in a neighborhood of u.
– p.64/65
Open problem
Numerical shadowing: prove that shadowing can be detected “a posteriori” in the numericalcomputation.
– p.65/65





![Neumann Boundary Problem for Parabolic Partial Differential … · 2018-08-06 · arXiv:1802.07626v1 [math.PR] 21 Feb 2018 Neumann Boundary Problem for Parabolic Partial Differential](https://img.pdfslide.us/doc/110x75/5fad472c1e274c0e81441004/neumann-boundary-problem-for-parabolic-partial-differential-2018-08-06-arxiv180207626v1.jpg)























