Embed Size (px)
Citation preview

http://www.iaeme.com/IJMET/index.asp 825 [email protected]
International Journal of Mechanical Engineering and Technology (IJMET) Volume 9, Issue 5, May 2018, pp. 825–833, Article ID: IJMET_09_05_091
Available online at http://www.iaeme.com/ijmet/issues.asp?JType=IJMET&VType=9&IType=5
ISSN Print: 0976-6340 and ISSN Online: 0976-6359
© IAEME Publication Scopus Indexed
SELF-PROPELLED ROCKER BOGIE BOT
ROVER - MARVIN
Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli and Taufeeq Hussain
U.G, Mechanical, Mahatma Gandhi Institute Of Technology, Hyderabad,
Accredited by National Board of Accreditation, New Delhi
S. Madhava Reddy
Professor, Dept. of Mech.Engg, MGIT, Hyderabad
ABSTRACT
A Rover is an unmanned mechanical instrument used for reducing human effort and
interventions Utilization of Rocker-Bogie mechanism is a very unique application by a
self-propelled robot for creating and addressing human problems. The rocker-bogie
system is the suspension arrangement used in the Mars rovers (mechanical robot)
introduced for the Mars Pathfinder. It is currently the most favoured design in aerospace
technology and planetary exploration applications and the same has been implemented in
this robot mechanism for achieving self-propelled motion.
Keyword: Bot Rover, Human problems, self-propelled
Cite this Article: Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli, Taufeeq Hussain
and S. Madhava Reddy, Self-Propelled Rocker Bogie Bot Rover – Marvin, International
Journal of Mechanical Engineering and Technology, 9(5), 2018, pp. 825–833
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=9&IType=5
1. INTRODUCTION
1.1. Overview
The Rocker Bogie system has been the suspension arrangement used in the Mars rovers. The
term ‘Rocker’ comes from the rocking aspect of the larger links on each side of the
suspension system. These rockers are connected to each other and the vehicle chassis through
a differential. Relative to the chassis, when one rocker goes up, the other goes down.
The chassis maintains the average pitch angle of both rockers. One end of a rocker is fitted
with a drive wheel and the other end is pivoted to a bogie. The term ‘Bogie’ refers to the links
that have a drive wheel at each end. The suspension has six wheels with symmetric structure
for both sides. Each side has 3 wheels which are connected to each other with two links. The
main linkage called rocker has 2 joints while first joint is connected to front wheel, the other
joint is assembled to another linkage called bogie, which is similar to train wagon suspension
member.

Self-Propelled Rocker Bogie Bot Rover – Marvin
http://www.iaeme.com/IJMET/index.asp 826 [email protected]
Work has been carried out to focus on eliminating the shortcomings of the rover. One of
the major shortcomings of current rocker-bogie rovers is that they are slow. In order to be able
to overcome significantly rough terrain without significant risk of flipping the vehicle or
damaging the suspension, these robots move slowly and climb over the obstacles by having
wheels lift each piece of the suspension over the obstacle one portion at a time. While
performance on rough terrain obstacles is important, it should be also considered situations
where the surface is flat or it has almost imperceptible obstacles, where the rover should
increase its speed to arrive faster from point A to point B.
We, in India have not conducted any mission for the exploration purposes. Not only mars
exploration the rocker bogie can also be used for military and civil purposes but there also it is
needed to be a little cost effective and fast. Thus our concern during the development of the
rover would be to optimise the speed such that the rover do not flip and may travel a little
faster too and make it cost effective with maximum possible rigidity and ruggedness.
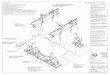
Figure 1 Representation of rocker bogie mechanism
The drafting of the rover was done in CATIA software by using the real time dimensions
after having studied the required shape and size of the rover. The design chosen is a unique,
one of a kind model which has never been used before with the rocker bogie mechanism. The
design was drafted using step down assembly, wherein the components are first drafted and
later assembled together to achieve the final output. Rockers using rocker bogie mechanism
make use of a suspension system that consists of several rigid elements connected through
joints of a certain number of degrees of freedom (DOF) resulting in a structure that has one
system DOF. This enables them to move along uneven terrain without losing contact with the
ground.
The chassis is manufactured in the Computer numerical control (CNC) machine with the
help of drafting being performed in CATIA software. Medium Density Fibreboard is used as
the material for the chassis.
The rover was fitted with a panel made with a combination of Aluminium and MDF
materials. The base plate was made with MDF whereas the frame of the panel was made from
Aluminium material. This panel was fitted with a L profile Aluminium channel that supports
the panel on the rover. The following figure shows the L profile channel.
A sample of MDF Medium-density fibreboard (MDF) is an engineered wood product
made by breaking down hardwood or softwood residuals into wood fibres, often in a
defibrator, combining it with wax and a resin binder, and forming panels by applying high
temperature and pressure.
2. COMPONENTS USED
Considering several parameters like load, strength, cost and capability the components were
selected as described below.

Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli, Taufeeq Hussain and S. Madhava Reddy
http://www.iaeme.com/IJMET/index.asp 827 [email protected]
2.1. Coupling
Hexagonal coupling made of brass having 6mm diameter were used for the six wheels of the
rover to be fixed firmly to the chassis.
1. To provide for misalignment of the shafts or to introduce mechanical flexibility.
2. To reduce the transmission of shock loads from one shaft to another Top = 18mm
(0.7")
2.2. Wheels
• Six wheels with 15cm diameter have been used for the rover. The material of the
wheels is rubber
• The wheels were selected depending on the requirement of ‘all-terrain’ movement of
the rover, with proper friction, stability and grip for the rover.
2.3. Clamps
Aluminium clamps for supporting the motor to the chassis was designed using CATIA
software according to predefined motor.
2.4. Arduino Board
• Arduino Mega 2560
• Arduino Nano
2.5. DC Motors
60 RPM Side Shaft Super Heavy Duty DC Gear Motor is suitable for running the rover
smoothly. It has sturdy construction with large gears. Gear box is built to handle the stall
torque produced by the motor. Drive shaft is supported from both sides with metal bushes.
Motor runs smoothly from 4V to 12V and gives 60 RPM at 12V. Motor has 8mm
diameter, 19mm length drive shaft with D shape for excellent coupling.
• Six motors with a torque of 11 kgf-cm
• Motor Diameter: 27.5 mm;
2.6. Motor Drivers
The L293D is a 16 pin IC, with eight pins, on each side, dedicated to the controlling of a
motor. There are 2 INPUT pins, 2 OUTPUT pins and 1 ENABLE pin for each motor.runs
smoothly
• Wide Supply-Voltage Range: 4.5 V to 36 V
• Internal ESD Protection
2.7. Ultrasonic Sensor
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats or
dolphins do. It offers excellent non-contact range detection with high accuracy and stable
readings in an easy-to-use package.
• The modules includes ultrasonic transmitters, receiver and control circuit.
• The basic principle of work:
1. Using IO trigger for at least 10us high level signal,

Self-Propelled Rocker Bogie Bot Rover – Marvin
http://www.iaeme.com/IJMET/index.asp 828 [email protected]
2. The Module automatically sends eight 40 kHz and detect whether there is a pulse
signal back.
3. If the signal back, through high level , time of high output IO duration is the time
from sending ultrasonic to returning.
4. Test distance = (high level time × velocity of sound (340M/S) / 2
2.8. RF Controller
• 2.4GHz 6-Channel Digital Transmitter Receiver Radio Control System Set.
• Channels: 6 Channels
• Product Dimensions: 21.6 x 10.5 x 26.7 c
Figure 2 Workflow implemented for the rover
The workflow followed and implemented for the manufacturing and fabrication of the
rover. The process layout is shown above.
3. METHODOLOGY
Marvin is a self-propelled assisted all terrain bot rover. It is a one of a kind rover having the
following capabilities:
1. Straight Line Motion with steering
2. Step climbing capability
3. All terrain motion
4. Obstruction sensing
5. Follower tracker
3.1. Straight line motion with steering
Marvin is equipped with the Arduino Mega 2560 that enables it to continuously transmit and
transfer signal between the microprocessor and the r/c controller. Steering function is
performed by making the rover move left and right with the help of a controller.

Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli, Taufeeq Hussain and S. Madhava Reddy
http://www.iaeme.com/IJMET/index.asp 829 [email protected]
Figure 3 Rover controlled with the controller
3.2. Step climbing capacity
Any height less than twice of the rover can be easily climbed by the rover at no payload
condition. The rover has been successfully tested to climb stairs of various heights. A
limitation angle of 60 degree is set as a parameter.
Figure 4 Stair climbing function of the rover
3.3. All terrain motion
With its robust and intricate design, Marvin the rover can traverse and rock in any surface. Be
it at a low friction surface or a rugged rocky hill; the rover has been tested on several
challenging surfaces successfully. The rover also has the capacity of moving on wet surfaces,
with a water height of anywhere less than 2m.
3.4. Obstruction sensing
The rover also has the function of eliminating obstacles that come in its path and choose a
new coordinate for its motion forward/backward. This function is achieved in coordination
with the Ultrasonic Sensor and the microprocessor Arduino Mega2560. The program is fed
into the microprocessor. The minimum distance through which it can detect obstacles is 2
meters.
3.5. Follower tracker
A specially designed beacon consisting of Arduino nano , 9v battery , ultrasonic sensor, an led
light indicator and a circuit( 9v to 5v converter) were neatly setup in a compact design. A
toggle switch was made to switch between follow me mode and wireless control mode. This
enables ease of switching between modes with a switch placed on the panel of the rover. Thus
mobility in using the rover is increased adding to the feature rich technology of the rover.
Figure 5 Follow-me module of the rover with beacon

Self-Propelled Rocker Bogie Bot Rover – Marvin
http://www.iaeme.com/IJMET/index.asp 830 [email protected]
4. MARVIN AS IT HAPPENED
Marvin draft: An exact replica of the proposed model of the rover was developed using Foam
board. This was generated to get a brief idea of what was going to be developed in this
project.
Marvin 1.0: The foam board model raised some serious design issues and constraints
which were addressed and improvised in this step. Medium Density Fibreboard, MDF was
used to make the rover chassis. Stepper motors initially proposed failed due to low torque and
advanced programming and thus a decision had to be taken to progress further.
Figure 6 Foam board (left) and MDF Board (Right)
Marvin 2.0: A unanimous decision was taken to replace the Stepper motors with DC
Geared motors thus helping the rover achieve a speed of 60RPM keeping in view the payload
to be included in the later stages of the project.
Marvin 2.1: Work was carried out to link the rover with a wireless controller, thus making
way for remote controlled operation of the rover. Successful interface between transmitter of
the controller and the receiver on the rover was performed.
Marvin 2.2: As proposed earlier, Ultrasonic sensor for obstacle detection was fitted on
one side to test and analyse the rover. Arduino was programmed accordingly to detect
obstacles. The operation was successful and helped us to progress further by adding more
sensors to the rover.
Marvin 2.2.1: A buzzer was installed on the body of the rover such that whenever the
Ultrasonic sensor interferes with an obstacle, it stops immediately. This enables the safety of
the components on the rover and also reduces wear and tear. Obstacle detection with beep
operation was successfully done in this stage.
Marvin 2.2.2: 360 degree obstacle detection with beep was initially planned by fitting
ultrasonic sensors on all the four sides of the rover. It was a tough task as programming took a
few hours and was complicated. Later the idea was dropped due to sophisticated fitting
methods and time constraints.
Marvin 2.3: As proposed earlier the rover was tested with improvised payload and moved
successfully as planned. With a payload of about 3kg the motors were sufficient enough to
push the rover in any desired direction.
Marvin 2.4: The rover was programmed with a follow tracker that moves along with the
operator with the technology of ultrasonic transceiver. A permissible range of 1metre was
fixed for the receiver on the rover. The operator holds a beacon that emits ultrasonic waves
which are received by the sensor on the rover, thus only when a signal is generated the rover
can follow.
If the operator holds the beacon in a direction anywhere away from a wide angle of 15
degrees, the echo signal is being sent to the rover who won’t help in the follower tracker
mechanism, thus making it a void. Currently only one directional motion is possible with the
follower tracker. On an advanced level, this technology can be improved further which is
briefly explained in the ‘future scope’ section of this project.

Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli, Taufeeq Hussain and S. Madhava Reddy
http://www.iaeme.com/IJMET/index.asp 831 [email protected]
Figure 7 Control panel of the rover
Marvin 2.4.1: The colour combination of the rover was decided and a two colour code for
the rover was selected. The panel was painted with Matte Black colour. The clamps used for
connecting the motors to the chassis were also painted with the same colour giving it a
complete pro look.
Marvin 2.4.2: The edge of the legs of chassis was rounded using a file giving it a better
look and finish. The chassis was then painted with metallic apple red colour to contrast it
deeper, hence making it an elegant looking rover.
The panel cover was made using digital printing and the ‘MARVIN’ tag was made with
3mm acrylic material by laser cutting machine. Within the stipulated time the project was
made ready and with a professional finish and look. It was decided to ensure high quality and
durable finish of the rover, as looks do matter! Hola Marvin! It’s finally developed!
Figure 8 Manufactured final unit of the rover
5. RESULTS AND DISCUSSION
The self-assisted rover with rocker bogie mechanism system is constructed and tested
successfully in different terrains. The rover was tested over various terrains and its operation
is found to be satisfactory. As expected, it evades unmountable obstacles and traverses over
obstacles which are less than 1.5 times the size of its wheel diameter. Obstruction detection
function is satisfactorily performed with the sensors placed all around the rover. The function
of follow me tracker is also working successfully with the help of ultrasonic technology
through Arduino.
Promoting the use of renewable energy, the rover can be fitted with a solar energy module
on its panel. This not only helps generate eco-friendly energy but also helps charge the battery
of the rover under constraints of proper sunlight conditions. This adds up as a strong
statement for the problem of free and clean sources of energy thus enabling better utilisation
of power resources.
As an application of the advancement of the rover for its future purpose, the rover can be
fitted with a night vision camera that efficiently helps monitor the surroundings for
surveillance and mobility purposes. The panel is fitted with front headlights provision that can
be advanced further for enabling ease of mobility with the use of night vision camera. If

Self-Propelled Rocker Bogie Bot Rover – Marvin
http://www.iaeme.com/IJMET/index.asp 832 [email protected]
expanded further on a large scale, the rover can be made completely automated with the use
of voice control and android technology. All these features improve the automation of the
rover and helps make it a user friendly bot rover.
6. CONCLUSIONS
The semi-autonomous all terrain rovers with rocker bogie mechanism is completed
successfully and its operation is tested and found to be correct. The main objective of the
project, to enable the rover to climb stairs and carry a payload has been achieved successfully
at a lower cost, with commercial off-the-shelf components to create opportunity in the
industrial markets for maximum efficiency and minimum cost is accomplished. With sensors
and follower trackers, the rover is built with a strong statement to achieve professional look
and design.
One of the main problems of this rover is the limitation offered by the battery power and
the communication range. When these limitations are answered by using solar panels to
charge battery and mobile data cards for internet connectivity, the rover can be made
operational in real time and can be left in a remote terrain for continuous operation. With
higher computing electronics, a higher level of autonomy can be given to the rover in
navigation by using GPS modules and path planning algorithms.
With further advancement on a large scale it can be effectively utilised in transporting
men and machinery along with performing sophisticated operations. The feature of a robotic
arm was proposed to help enable the rover with a mechanical arm that can pick, place and
meddle with components it interferes with.
ACKNOWLEDGMENT
The authors would like to thank the Principal, management and faculty of the college
Mahatma Gandhi Institute of Technology, Gandipet, Hyderabad for their remarkable support
and motivation throughout this work.
REFERENCES
[1] Aditya.V, “Unmanned Terrain with Rocker Bogie Suspension”, International Journal for
Research in Applied Science & Engineering Technology (IJRASET), Volume 3 Issue IX,
September 2015 IC Value: 13.98 ISSN: 2321-9653.
[2] Nitin Yadav, BalRam Bhardwaj, Suresh Bhardwaj, “ Design analysis of Rocker Bogie
Suspension System and Access the possibility to implement in Front Loading Vehicles”,
Mechanical Department, DITMR College, MDU University, Rohtak, Haryana, India,
2Maclec Technical Project Lab. Pvt. Ltd. New Delhi, India.), IOSR Journal of Mechanical
and Civil Engineering (IOSR-JMCE) e-ISSN: 2278-1684,p-ISSN: 2320-334X, Volume
12, Issue 3 Ver. III (May. - Jun. 2015), PP 64-67.
[3] P. Panigrahi, A. Barik, Rajneesh R. & R. K. Sahu, “Introduction of Mechanical Gear Type
Steering Mechanism to Rocker Bogie”, Imperial Journal of Interdisciplinary Research
(IJIR) Vol-2, Issue-5, ISSN: 2454-1362,2016.
[4] Bhole, S. H. Turlapati, Raja shekhar V. S, J. Dixit, S. V. Shah, Madhava Krishna K,
“Design of a Robust Stair Climbing Compliant Modular Robot to Tackle Overhang on
Stairs” arXiv:1607.03077v1 [cs.RO], 11 Jul 2016.
[5] M. D. Manik, A. S. Chauhan, S. Chakraborty, V. R. Tiwari, “Experimental Analysis of
climbing stairs with the rocker-bogie mechanism”, Vol-2 Issue-2 P.No. 957-960IJARIIE-
ISSN (O)-2395- 4396, 2016.

Avaze Shaikh, Edu Samuel Pradeep, Vikas Gattupalli, Taufeeq Hussain and S. Madhava Reddy
http://www.iaeme.com/IJMET/index.asp 833 [email protected]
[6] D. Harrington and C. Voorhees, “The Challenges of Designing the Rocker-Bogie
Suspension for the Mars Exploration Rover”, Proceedings of the 37th Aerospace
Mechanisms Symposium, Johnson Space Center, page No. 185-1985, May 19-21, 2004.
[7] Y. L. Maske, S. V. Patil, S. Deshmukh, “Modeling and MBD simulation of stairclimbing
robot with rocker bogie Mechanism”, International Journal of Innovative Research in
Technology, 101743, Volume 1 Issue 12, Page no. 267-273, ISSN: 2349-6002, 2015.
[8] N. Yadav, B. Bhardwaj, S. Bhardwaj, “Design analysis of Rocker Bogie Suspension
System and Access the possibility to implement in Front Loading Vehicles”, IOSR
Journal of Mechanical and Civil Engineering, e-ISSN: 2278-1684,p-ISSN: 2320-334X,
Volume 12, Issue 3 Ver. III, PP 64-67, May - Jun. 2015.
[9] L. Bruzzone and G. Quaglia, “Review article: locomotion systems for ground mobile
robots in unstructured environments”, Mech. Sci., 3, 49–62, 2012. DOI: 10.5194/ms-3-49-
2012.
[10] F. Ullrich, A. Haydar G., S. Sukkarieh, “Design Optimization of a Mars Rover’s Rocker-
Bogie Mechanism using Genetic Algorithms”, Proceedings from 10th Australian Space
Science Conference, Page No. 199-210, 2010.
[11] http://www.nasa.gov/offices/education/centers/kennedy/technology/ nasarmc.html
[12] http://www.jpl.nasa.gov/news/news.php?feature=2732

![Modular Reconfigurable Robots in Space Applicationsmodlab.seas.upenn.edu/publications/space.pdfThe rocker-bogie mechanism is well documented and proven in a Mars rover [24] used to](https://img.pdfslide.us/doc/110x75/606f98d2e945337f552236a8/modular-reconfigurable-robots-in-space-the-rocker-bogie-mechanism-is-well-documented.jpg)