Embed Size (px)
Citation preview

Research ArticleDynamic Rocker-Bogie Kinematical Analysis ina High-Speed Traversal Stability Enhancement
Sunxin Wang12 and Yan Li2
1School of Higher Vocational and Technical Education Xirsquoan University of Technology Xirsquoan 710082 China2School of Mechanical and Precision Instrument Engineering Xirsquoan University of Technology Xirsquoan 710048 China
Correspondence should be addressed to Sunxin Wang wsx8280126com
Received 19 April 2016 Revised 2 August 2016 Accepted 23 August 2016
Academic Editor Christopher J Damaren
Copyright copy 2016 S Wang and Y Li This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The rocker-bogie suspension system has robust capabilities to deal with uneven terrain because of its distributing of the payloadover its six wheels uniformly while there is one major shortcoming to high-speed traversal over the planar terrain This paperproposes a new dynamic rocker-bogie suspension system with two modes of operation it can expand the span of the rocker-bogiesupport polygon to increase travel rate when the terrain is planar and it can switch to its original configuration to move by lowspeedwhen it is facedwith rough terrainThe analysis on dynamic stabilitymargin and kinematical simulation on the two operatingmodes of rocker-bogie are employed to analyze and verify the rationality and effectiveness of the modification in the structure
1 Introduction
All-terrain mobile robots are different from other ordinarymobile robots because they consider the effect of unstruc-tured terrain and its environment [1] Therefore these robotsare designed to operate effectively on natural terrains thatmay be sloped rough and deformable [2] and are used insuch fields as deep space exploration [3 4] safety and rescue[5 6] and military and civilian application [7 8]
In order to ensure that the task is successfully achieved itis a key issue to design and optimize the suspension system ofall-terrain mobile robots to improve its mobile performanceBecause of its robust capabilities to deal with obstacles therocker-bogie suspension system is successfully used in theSojourner Mars Rover MER (Mars Exploration Rover) andthe latest MSL (Mars Science Laboratory) [9] However therocker-bogie suspension system has still some shortcomingFirst the average speed of operation is very slow Secondit makes the rocker-bogie system not suitable for situationswhere high-speed traversal over hard-flat surfaces is neededto cover large areas in short periods of time
In pursuance of achieving a greater stability margin overhigh-speed traversal without losing the original configura-tion a new dynamic rocker-bogie suspension system with
two modes of operation that can switch between origi-nal configuration and high-speed traversal configuration isintroduced in this paper For high-speed traversal mode ofrocker-bogie suspension system it can expand the span ofthe rocker-bogie support polygon to increase speed whenmoving on hard-flat terrain or uneven terrain with minorobstacles On the other hand it can automatically switch to itsoriginal configuration to move by low speed when it is facedwith rough terrain and significant obstacles
The remaining parts of this paper are organized as followsIn Section 2 we propose modification in the structure of therocker-bogie suspension system increasing the span of thesupport polygon In Section 3 we analyze the stabilitymarginof the structuremodification by force-angle stabilitymeasureThe analysis and verification by the Adams simulation willbe shown in Section 4 Finally the conclusions are given inSection 5
2 Modification in the Structure of the Rocker-Bogie Suspension System
The rocker-bogie suspension system is a passive springlessand symmetricmechanism Each side of the rocker-bogie hasa rocker and a bogie the rocker is connected to the rearwheel
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2016 Article ID 5181097 8 pageshttpdxdoiorg10115520165181097
2 International Journal of Aerospace Engineering
4
1
2
3
6 5
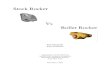
Figure 1 Rocker-bogie suspension system 1 front wheel 2 middle wheel 3 rear wheel 4 bogie 5 rocker 6 differential mechanism
(a) (b)
Figure 2 The two models of rocker-bogie suspension configurations (a) original configuration and (b) high-speed traversal configuration
and the middle wheel and the front wheel are connected bythe bogie The two sides of rocker-bogie are connected bythe differential bar attached to the main body which ensuresthat the six wheels are in contact with the ground all the timeproviding a stable platform for the scientific instruments andsensors as shown in Figure 1
The rocker-bogie suspension system is good at deal-ing with obstacles and excellent traversability Howeverthe rocker-bogie based robots must move at a very lowaverage speed to ensure the stability of traveling [10] Insome situations mobile robots mostly face slightly uneventerrain with rarely significant obstacles on it This is whywe proposed a configuration modification expanding thespan of the rocker-bogie system support polygon to increasethe traversability Nevertheless when it needs to deal with
obstacles it can switch to its original configuration withoutlosing its native robust capability The three-dimensionalmodel of the original configuration and the proposed high-speed traversal configuration is introduced in Figure 2
As Figure 2 shows the original configuration can onlyrotate in a pitch axis located at the front part of the rockerThemodification structure in the rocker-bogie suspension systemis based on adding a rotation axis over the Y-plane of thebogie varying the yaw orientation of the bogieTherefore thenew high-speed traversal mechanism can alter the position ofthe outer support polygon points and increase the size of thearea in contact with the ground
This modification in configuration can achieve a flexibleand efficient trafficability one rocker-bogie system twomodes of operation When the mobile robot faces significant
International Journal of Aerospace Engineering 3
X
YPc
P1
I1
I2
d1
d2
1205791 1205792
fr
Figure 3 Planar force-angle stability metric
obstacles it needs to keep the original configuration andovercome them with a low speed to ensure the stabilityWhen the mobile robot faces hard-flat terrain or slightlyuneven terrain it will switch to the high-speed traversalconfiguration by rotating the bogie over theX-plane keepingexcellent stability when moving at high speeds
3 Analysis on Dynamic Stability Margin forthe High-Speed Traversal Enhancement
As mentioned in Section 2 the new high-speed traversalmechanism is based on adding a rotation axis over the Y-plane of the bogie to expand its support polygon making itmore stable and adaptable while moving at high speed Andthen how many angles of rotating the bogie are optimal forthe required high-speed mode position As it was analyzedby using the Static Stability Factor (SSF) metric [11] andverified by the Solidworks software simulation in [12] oncethe system has rotated its bogies 45 degrees to the requiredhigh-speed mode position the roverrsquos support polygon isexpanded reaching a bigger contact area
The SSFmetric employed in [12] is purely geometrical andsuits for analyzing and evaluating the static stability marginbut it does not take any dynamic effects into considerationIn order to further analyze the effectiveness of our high-speed traversal configuration by dynamic stabilitymargin weselect the force-angle stability metric [13] to replace the SSFmetric This new metric focuses its stability criterion on thetipover effect which occurs when a mobile system undergoesa reduction of ground contact points due to rotation
A planar example that highlights the graphical nature ofthe force-angle stability metric is demonstrated by Figure 3The Center of Mass (CM) of the planar system is subject toa net force 119891
119903 which is the sum of all forces acting on the
mobile system except the supporting reaction forces Thisforce vector subtends two angles 120579
1and 120579
2 with the two
tipover axis normals 1198681and 1198682and acts along a line which
is at a distance of 1198891 and 119889
2 respectively from the two
tipover axesThe force-angle stabilitymetric120573119894is given by the
product of 120579119894 119889119894 and 119891
119903 as formulated in the following
120573119894= 120579119894sdot10038171003817100381710038171198891198941003817100381710038171003817 sdot10038171003817100381710038171198911199031003817100381710038171003817 (1)
The systemrsquos stability margin 120573119878is obtained by the
minimum value of 120573119894 For a mobile system if we can increase
the value of the parameters involved in (1) the value of 120573119878will
X
Y
Z
P1
P2
P3
P4
P5
P6
a1
a2
a3
a4
a5
a6
d1
fr
(a)
X
Y
Z
P9984001
P9984002
P9984003
P9984004
P9984005
P9984006
a9984001
a9984002
a9984003
a9984004
a9984005
a9984006
d9984001
f998400r
(b)
Figure 4 3D force-angle stability metric (a) original configurationand (b) high-speed traversal configuration
get bigger and the stability margin of the systemwill improvemaking the vehicle able to travel with higher stability
The critical tipover stability occurs when 120573119878goes to zero
that is when any 120579119894 119889119894 or 119891
119903becomes zero The angle 120579
119894
becomes zero when the net force is coplanar with one of thetipover axes 119868
119894 and this is the typical manner in which a
tipover instability occurs If119891119903lies outside the cone described
by 1198681and 1198682 the angle becomes negative and tipover is in
progress The distance 119889119894 becomes zero as the net force
is coplanar with one of the tipover axes or as the systemCM approaches one of the tipover axes Note that these twogeometric parameters 120579
119894and 119889
119894 together characterize the
tipover stability margin of the system [14]Of all the vehicle contact points with the ground it is
only necessary to consider those outermost points whichform a convex support polygon when projected onto ahorizontal plane which is wheel-terrain contact point [14]Therefore we built the 3D force-angle stability measurediagram of the original configuration and the high-speedtraversal configuration respectively as shown in Figure 4
4 International Journal of Aerospace Engineering
For a consistent formulation the 119901119894parameters are
numbered in ascending order following a right-hand rulewhere the thumb is directed downwards along the gravityvector that is the ground contact points are numbered inclockwise order when viewed from above The lines whichjoin the ground contact points are the candidate tipovermodeaxes 119886
119894 and the set of these lines will be referred to as the
support polygonIn order to increase the systemrsquos stability margin 120573
119878 we
should maximize the value of the product of 120579119894 119889119894 and
119891119903 As shown in Figure 4 the force-angle stability metric
of the middle wheel is the minimum value as we proposedpreviously Therefore we select the middle wheel of the twoconfigurations as a focus point
In the same condition the value of the resultant forcethat acts on the original configuration 119891
119903 is equal to
the value of the resultant force that acts on the high-speedtraversal configuration 1198911015840
119903 However the included angle 120579
1
and the vertical dimension of original configuration 1198891 are
smaller than the values 12057910158401and 1198891015840
1 of the high-speed traversal
configuration therefore the stability margin of the originalconfiguration 120573
119878 is smaller than the high-speed traversal
configuration 1205731015840119878
Based on the analysis above the rocker-bogie suspensionmechanismhas a greater stabilitymargin after the high-speedtraversal enhancement making it more stable while travelingat high speed Moreover when the 45-degree rotation of thebogie is completed the roverrsquos support polygon is expandedreaching a bigger contact area [12] This expansion of thecontact area sets the roverrsquos Center of Mass (CM) insidea bigger track base making it more robust against loadtransfers due to the interaction of internal and external forces
4 Kinematical Simulation on the TwoOperating Modes of Rocker-Bogie
In paper [12] the two operating modes of rocker-bogie weretested by the Solidworks software using their multibodydynamic motion analysis thus the data obtained of thesesimulations was contrasted with the static stability margin(ie Center of Gravity position) results
In order to implement the kinematical simulation onrocker-bogie system we use the Adams software to analysisand verify the two operating modes of rocker-bogie in twopredefined scenarios Scenario 1 where the terrain presentsobstacles of heights smaller than the vehicle wheelrsquos radiusScenario 2 where the terrain is mostly covered in obstaclesthat surpass the previously mentioned vehicle wheelrsquos radius
Moreover in order to comprehensively measure andverify the tipover stability of the two operating modes ofrocker-bogie on uneven terrain the rocker-bogie systemrsquosstability is expressed and evaluated in relation to each axislateral stability (stability in roll) directional stability (stabilityin yaw) and longitudinal stability (stability in pitch)
41 Simulation Results of Scenario 1 The 3D model wasdeveloped by Adams as shown in Figure 5 We set up foursegmented obstacles distributed on a flat surface the height
Figure 5 Kinematical simulation in scenario 1
Original RBCM_positionHigh-speed RBCM_position
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
140
145
150
155
Leng
th (m
)
Figure 6 Vertical position variation of the vehiclersquos CM
Table 1 Simulation parameters of the rocker-bogie suspension
Parameters ValueIntegral dimension (mm) 2760 lowast 2300 lowast 1015
Total weight (Kg) 330 (no-load)Wheel diameter (mm) 500Wheel width (mm) 350Damping 15Stiffness coefficient (Nmm) 105
Dynamic friction coefficient 119891119889
05Static friction coefficient 119891
11990408
Dynamic friction translation velocity 119881119889
(mms) 10
Static friction slip velocity 119881119904(mms) 01
of every obstacle is 150mmwhich is less than the radius of thewheel and thewheel rotation speed is 100 degsThe technicalparameters of the rocker-bogie suspension are shown inTable 1 The dynamic performance curve is shown in Figures7 8 and 9 The solid red line in the graph describes thedynamic performance of original configuration the dashedblue lines describe the dynamic performance of high-speedtraversal configuration
The vertical direction of the main bodyrsquos Center of Massis shown in Figure 6 and the data in Figure 6 is shown inTable 2 After 12 seconds of simulation run all six wheels ofthe vehicle are engaging obstacles in the rugged topographyof the terrain
International Journal of Aerospace Engineering 5
High-speed RBYAWOriginal RBYAW
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(a)
High-speed RBPITCHOriginal RBPITCH
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(b)
High-speed RBPROLLOriginal RBROLL
300100 150 200 2505000Time (sec)
minus30
minus20
minus10
0
10
Ang
le (d
eg)
(c)
Figure 7 Yaw pitch and roll angular variation of the main body (a) yaw angular variation of the main body (b) pitch angular variation ofthe main body and (c) roll angular variation of the main body
Table 2 Data from the CMrsquos vertical position variation
Original conf High-speedtraversal conf
Minimum value of CMrsquosheight (mm) 142065 142064
Maximum value of CMrsquosheight (mm) 152557 149098
CMrsquos height variation range(mm) 10492 7034
The variation of CM displacement in the process is thebasis of the stability evaluation of all-terrain mobile robotswhich will generally affect the stability of the structure Fromthe table the alterations of CM displacement for originalconfiguration are one point five times those of high-speedtraversal configuration Overall the latter perform better
The curve of the yaw pitch and roll angular variation ofthe main body is shown in Figure 7 and the data in Figure 7is shown in Table 3
The variation ranges of yaw pitch and roll in the processdirectly affect the vehicle stability as the result shows thatthe three-variation range is about 50 higher than that of
high-speed mode The smaller the angle change the little theprobability that the vehicle will tip over
The variation of velocity acceleration angular velocityand angular acceleration of the main body is shown inFigure 8 and the data in Figure 8 is shown in Table 4
Through contrast analysis we can see that the all indica-tors variation ranges of the rocker-bogie high-speed traversalconfiguration are smaller than the one of the rocker-bogieoriginal configuration and the curve of the high-speed con-figuration changes more gently without violent alterationswhile in the curve of the original configuration there existsignificant alterations whichmay cause the vehicle to tip overThus we draw the conclusion that the high-speed traversalconfiguration is more stable than the original configurationmaking it more suitable for this proposed scenario
42 Simulation Results of Scenario 2 Traversability reflectsthe mobile robotrsquos ability to adapt to significant rough ter-rains Mobile robots will be challenged with various obstacleson the road with the ones that are perpendicular to thesurface being the most severe Therefore the ability ofthe mobile robot to overcome vertical obstacles reflects itstraversability capabilities For this purpose we developed the
6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
4
1
2
3
6 5
Figure 1 Rocker-bogie suspension system 1 front wheel 2 middle wheel 3 rear wheel 4 bogie 5 rocker 6 differential mechanism
(a) (b)
Figure 2 The two models of rocker-bogie suspension configurations (a) original configuration and (b) high-speed traversal configuration
and the middle wheel and the front wheel are connected bythe bogie The two sides of rocker-bogie are connected bythe differential bar attached to the main body which ensuresthat the six wheels are in contact with the ground all the timeproviding a stable platform for the scientific instruments andsensors as shown in Figure 1
The rocker-bogie suspension system is good at deal-ing with obstacles and excellent traversability Howeverthe rocker-bogie based robots must move at a very lowaverage speed to ensure the stability of traveling [10] Insome situations mobile robots mostly face slightly uneventerrain with rarely significant obstacles on it This is whywe proposed a configuration modification expanding thespan of the rocker-bogie system support polygon to increasethe traversability Nevertheless when it needs to deal with
obstacles it can switch to its original configuration withoutlosing its native robust capability The three-dimensionalmodel of the original configuration and the proposed high-speed traversal configuration is introduced in Figure 2
As Figure 2 shows the original configuration can onlyrotate in a pitch axis located at the front part of the rockerThemodification structure in the rocker-bogie suspension systemis based on adding a rotation axis over the Y-plane of thebogie varying the yaw orientation of the bogieTherefore thenew high-speed traversal mechanism can alter the position ofthe outer support polygon points and increase the size of thearea in contact with the ground
This modification in configuration can achieve a flexibleand efficient trafficability one rocker-bogie system twomodes of operation When the mobile robot faces significant
International Journal of Aerospace Engineering 3
X
YPc
P1
I1
I2
d1
d2
1205791 1205792
fr
Figure 3 Planar force-angle stability metric
obstacles it needs to keep the original configuration andovercome them with a low speed to ensure the stabilityWhen the mobile robot faces hard-flat terrain or slightlyuneven terrain it will switch to the high-speed traversalconfiguration by rotating the bogie over theX-plane keepingexcellent stability when moving at high speeds
3 Analysis on Dynamic Stability Margin forthe High-Speed Traversal Enhancement
As mentioned in Section 2 the new high-speed traversalmechanism is based on adding a rotation axis over the Y-plane of the bogie to expand its support polygon making itmore stable and adaptable while moving at high speed Andthen how many angles of rotating the bogie are optimal forthe required high-speed mode position As it was analyzedby using the Static Stability Factor (SSF) metric [11] andverified by the Solidworks software simulation in [12] oncethe system has rotated its bogies 45 degrees to the requiredhigh-speed mode position the roverrsquos support polygon isexpanded reaching a bigger contact area
The SSFmetric employed in [12] is purely geometrical andsuits for analyzing and evaluating the static stability marginbut it does not take any dynamic effects into considerationIn order to further analyze the effectiveness of our high-speed traversal configuration by dynamic stabilitymargin weselect the force-angle stability metric [13] to replace the SSFmetric This new metric focuses its stability criterion on thetipover effect which occurs when a mobile system undergoesa reduction of ground contact points due to rotation
A planar example that highlights the graphical nature ofthe force-angle stability metric is demonstrated by Figure 3The Center of Mass (CM) of the planar system is subject toa net force 119891
119903 which is the sum of all forces acting on the
mobile system except the supporting reaction forces Thisforce vector subtends two angles 120579
1and 120579
2 with the two
tipover axis normals 1198681and 1198682and acts along a line which
is at a distance of 1198891 and 119889
2 respectively from the two
tipover axesThe force-angle stabilitymetric120573119894is given by the
product of 120579119894 119889119894 and 119891
119903 as formulated in the following
120573119894= 120579119894sdot10038171003817100381710038171198891198941003817100381710038171003817 sdot10038171003817100381710038171198911199031003817100381710038171003817 (1)
The systemrsquos stability margin 120573119878is obtained by the
minimum value of 120573119894 For a mobile system if we can increase
the value of the parameters involved in (1) the value of 120573119878will
X
Y
Z
P1
P2
P3
P4
P5
P6
a1
a2
a3
a4
a5
a6
d1
fr
(a)
X
Y
Z
P9984001
P9984002
P9984003
P9984004
P9984005
P9984006
a9984001
a9984002
a9984003
a9984004
a9984005
a9984006
d9984001
f998400r
(b)
Figure 4 3D force-angle stability metric (a) original configurationand (b) high-speed traversal configuration
get bigger and the stability margin of the systemwill improvemaking the vehicle able to travel with higher stability
The critical tipover stability occurs when 120573119878goes to zero
that is when any 120579119894 119889119894 or 119891
119903becomes zero The angle 120579
119894
becomes zero when the net force is coplanar with one of thetipover axes 119868
119894 and this is the typical manner in which a
tipover instability occurs If119891119903lies outside the cone described
by 1198681and 1198682 the angle becomes negative and tipover is in
progress The distance 119889119894 becomes zero as the net force
is coplanar with one of the tipover axes or as the systemCM approaches one of the tipover axes Note that these twogeometric parameters 120579
119894and 119889
119894 together characterize the
tipover stability margin of the system [14]Of all the vehicle contact points with the ground it is
only necessary to consider those outermost points whichform a convex support polygon when projected onto ahorizontal plane which is wheel-terrain contact point [14]Therefore we built the 3D force-angle stability measurediagram of the original configuration and the high-speedtraversal configuration respectively as shown in Figure 4
4 International Journal of Aerospace Engineering
For a consistent formulation the 119901119894parameters are
numbered in ascending order following a right-hand rulewhere the thumb is directed downwards along the gravityvector that is the ground contact points are numbered inclockwise order when viewed from above The lines whichjoin the ground contact points are the candidate tipovermodeaxes 119886
119894 and the set of these lines will be referred to as the
support polygonIn order to increase the systemrsquos stability margin 120573
119878 we
should maximize the value of the product of 120579119894 119889119894 and
119891119903 As shown in Figure 4 the force-angle stability metric
of the middle wheel is the minimum value as we proposedpreviously Therefore we select the middle wheel of the twoconfigurations as a focus point
In the same condition the value of the resultant forcethat acts on the original configuration 119891
119903 is equal to
the value of the resultant force that acts on the high-speedtraversal configuration 1198911015840
119903 However the included angle 120579
1
and the vertical dimension of original configuration 1198891 are
smaller than the values 12057910158401and 1198891015840
1 of the high-speed traversal
configuration therefore the stability margin of the originalconfiguration 120573
119878 is smaller than the high-speed traversal
configuration 1205731015840119878
Based on the analysis above the rocker-bogie suspensionmechanismhas a greater stabilitymargin after the high-speedtraversal enhancement making it more stable while travelingat high speed Moreover when the 45-degree rotation of thebogie is completed the roverrsquos support polygon is expandedreaching a bigger contact area [12] This expansion of thecontact area sets the roverrsquos Center of Mass (CM) insidea bigger track base making it more robust against loadtransfers due to the interaction of internal and external forces
4 Kinematical Simulation on the TwoOperating Modes of Rocker-Bogie
In paper [12] the two operating modes of rocker-bogie weretested by the Solidworks software using their multibodydynamic motion analysis thus the data obtained of thesesimulations was contrasted with the static stability margin(ie Center of Gravity position) results
In order to implement the kinematical simulation onrocker-bogie system we use the Adams software to analysisand verify the two operating modes of rocker-bogie in twopredefined scenarios Scenario 1 where the terrain presentsobstacles of heights smaller than the vehicle wheelrsquos radiusScenario 2 where the terrain is mostly covered in obstaclesthat surpass the previously mentioned vehicle wheelrsquos radius
Moreover in order to comprehensively measure andverify the tipover stability of the two operating modes ofrocker-bogie on uneven terrain the rocker-bogie systemrsquosstability is expressed and evaluated in relation to each axislateral stability (stability in roll) directional stability (stabilityin yaw) and longitudinal stability (stability in pitch)
41 Simulation Results of Scenario 1 The 3D model wasdeveloped by Adams as shown in Figure 5 We set up foursegmented obstacles distributed on a flat surface the height
Figure 5 Kinematical simulation in scenario 1
Original RBCM_positionHigh-speed RBCM_position
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
140
145
150
155
Leng
th (m
)
Figure 6 Vertical position variation of the vehiclersquos CM
Table 1 Simulation parameters of the rocker-bogie suspension
Parameters ValueIntegral dimension (mm) 2760 lowast 2300 lowast 1015
Total weight (Kg) 330 (no-load)Wheel diameter (mm) 500Wheel width (mm) 350Damping 15Stiffness coefficient (Nmm) 105
Dynamic friction coefficient 119891119889
05Static friction coefficient 119891
11990408
Dynamic friction translation velocity 119881119889
(mms) 10
Static friction slip velocity 119881119904(mms) 01
of every obstacle is 150mmwhich is less than the radius of thewheel and thewheel rotation speed is 100 degsThe technicalparameters of the rocker-bogie suspension are shown inTable 1 The dynamic performance curve is shown in Figures7 8 and 9 The solid red line in the graph describes thedynamic performance of original configuration the dashedblue lines describe the dynamic performance of high-speedtraversal configuration
The vertical direction of the main bodyrsquos Center of Massis shown in Figure 6 and the data in Figure 6 is shown inTable 2 After 12 seconds of simulation run all six wheels ofthe vehicle are engaging obstacles in the rugged topographyof the terrain
International Journal of Aerospace Engineering 5
High-speed RBYAWOriginal RBYAW
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(a)
High-speed RBPITCHOriginal RBPITCH
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(b)
High-speed RBPROLLOriginal RBROLL
300100 150 200 2505000Time (sec)
minus30
minus20
minus10
0
10
Ang
le (d
eg)
(c)
Figure 7 Yaw pitch and roll angular variation of the main body (a) yaw angular variation of the main body (b) pitch angular variation ofthe main body and (c) roll angular variation of the main body
Table 2 Data from the CMrsquos vertical position variation
Original conf High-speedtraversal conf
Minimum value of CMrsquosheight (mm) 142065 142064
Maximum value of CMrsquosheight (mm) 152557 149098
CMrsquos height variation range(mm) 10492 7034
The variation of CM displacement in the process is thebasis of the stability evaluation of all-terrain mobile robotswhich will generally affect the stability of the structure Fromthe table the alterations of CM displacement for originalconfiguration are one point five times those of high-speedtraversal configuration Overall the latter perform better
The curve of the yaw pitch and roll angular variation ofthe main body is shown in Figure 7 and the data in Figure 7is shown in Table 3
The variation ranges of yaw pitch and roll in the processdirectly affect the vehicle stability as the result shows thatthe three-variation range is about 50 higher than that of
high-speed mode The smaller the angle change the little theprobability that the vehicle will tip over
The variation of velocity acceleration angular velocityand angular acceleration of the main body is shown inFigure 8 and the data in Figure 8 is shown in Table 4
Through contrast analysis we can see that the all indica-tors variation ranges of the rocker-bogie high-speed traversalconfiguration are smaller than the one of the rocker-bogieoriginal configuration and the curve of the high-speed con-figuration changes more gently without violent alterationswhile in the curve of the original configuration there existsignificant alterations whichmay cause the vehicle to tip overThus we draw the conclusion that the high-speed traversalconfiguration is more stable than the original configurationmaking it more suitable for this proposed scenario
42 Simulation Results of Scenario 2 Traversability reflectsthe mobile robotrsquos ability to adapt to significant rough ter-rains Mobile robots will be challenged with various obstacleson the road with the ones that are perpendicular to thesurface being the most severe Therefore the ability ofthe mobile robot to overcome vertical obstacles reflects itstraversability capabilities For this purpose we developed the
6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
X
YPc
P1
I1
I2
d1
d2
1205791 1205792
fr
Figure 3 Planar force-angle stability metric
obstacles it needs to keep the original configuration andovercome them with a low speed to ensure the stabilityWhen the mobile robot faces hard-flat terrain or slightlyuneven terrain it will switch to the high-speed traversalconfiguration by rotating the bogie over theX-plane keepingexcellent stability when moving at high speeds
3 Analysis on Dynamic Stability Margin forthe High-Speed Traversal Enhancement
As mentioned in Section 2 the new high-speed traversalmechanism is based on adding a rotation axis over the Y-plane of the bogie to expand its support polygon making itmore stable and adaptable while moving at high speed Andthen how many angles of rotating the bogie are optimal forthe required high-speed mode position As it was analyzedby using the Static Stability Factor (SSF) metric [11] andverified by the Solidworks software simulation in [12] oncethe system has rotated its bogies 45 degrees to the requiredhigh-speed mode position the roverrsquos support polygon isexpanded reaching a bigger contact area
The SSFmetric employed in [12] is purely geometrical andsuits for analyzing and evaluating the static stability marginbut it does not take any dynamic effects into considerationIn order to further analyze the effectiveness of our high-speed traversal configuration by dynamic stabilitymargin weselect the force-angle stability metric [13] to replace the SSFmetric This new metric focuses its stability criterion on thetipover effect which occurs when a mobile system undergoesa reduction of ground contact points due to rotation
A planar example that highlights the graphical nature ofthe force-angle stability metric is demonstrated by Figure 3The Center of Mass (CM) of the planar system is subject toa net force 119891
119903 which is the sum of all forces acting on the
mobile system except the supporting reaction forces Thisforce vector subtends two angles 120579
1and 120579
2 with the two
tipover axis normals 1198681and 1198682and acts along a line which
is at a distance of 1198891 and 119889
2 respectively from the two
tipover axesThe force-angle stabilitymetric120573119894is given by the
product of 120579119894 119889119894 and 119891
119903 as formulated in the following
120573119894= 120579119894sdot10038171003817100381710038171198891198941003817100381710038171003817 sdot10038171003817100381710038171198911199031003817100381710038171003817 (1)
The systemrsquos stability margin 120573119878is obtained by the
minimum value of 120573119894 For a mobile system if we can increase
the value of the parameters involved in (1) the value of 120573119878will
X
Y
Z
P1
P2
P3
P4
P5
P6
a1
a2
a3
a4
a5
a6
d1
fr
(a)
X
Y
Z
P9984001
P9984002
P9984003
P9984004
P9984005
P9984006
a9984001
a9984002
a9984003
a9984004
a9984005
a9984006
d9984001
f998400r
(b)
Figure 4 3D force-angle stability metric (a) original configurationand (b) high-speed traversal configuration
get bigger and the stability margin of the systemwill improvemaking the vehicle able to travel with higher stability
The critical tipover stability occurs when 120573119878goes to zero
that is when any 120579119894 119889119894 or 119891
119903becomes zero The angle 120579
119894
becomes zero when the net force is coplanar with one of thetipover axes 119868
119894 and this is the typical manner in which a
tipover instability occurs If119891119903lies outside the cone described
by 1198681and 1198682 the angle becomes negative and tipover is in
progress The distance 119889119894 becomes zero as the net force
is coplanar with one of the tipover axes or as the systemCM approaches one of the tipover axes Note that these twogeometric parameters 120579
119894and 119889
119894 together characterize the
tipover stability margin of the system [14]Of all the vehicle contact points with the ground it is
only necessary to consider those outermost points whichform a convex support polygon when projected onto ahorizontal plane which is wheel-terrain contact point [14]Therefore we built the 3D force-angle stability measurediagram of the original configuration and the high-speedtraversal configuration respectively as shown in Figure 4
4 International Journal of Aerospace Engineering
For a consistent formulation the 119901119894parameters are
numbered in ascending order following a right-hand rulewhere the thumb is directed downwards along the gravityvector that is the ground contact points are numbered inclockwise order when viewed from above The lines whichjoin the ground contact points are the candidate tipovermodeaxes 119886
119894 and the set of these lines will be referred to as the
support polygonIn order to increase the systemrsquos stability margin 120573
119878 we
should maximize the value of the product of 120579119894 119889119894 and
119891119903 As shown in Figure 4 the force-angle stability metric
of the middle wheel is the minimum value as we proposedpreviously Therefore we select the middle wheel of the twoconfigurations as a focus point
In the same condition the value of the resultant forcethat acts on the original configuration 119891
119903 is equal to
the value of the resultant force that acts on the high-speedtraversal configuration 1198911015840
119903 However the included angle 120579
1
and the vertical dimension of original configuration 1198891 are
smaller than the values 12057910158401and 1198891015840
1 of the high-speed traversal
configuration therefore the stability margin of the originalconfiguration 120573
119878 is smaller than the high-speed traversal
configuration 1205731015840119878
Based on the analysis above the rocker-bogie suspensionmechanismhas a greater stabilitymargin after the high-speedtraversal enhancement making it more stable while travelingat high speed Moreover when the 45-degree rotation of thebogie is completed the roverrsquos support polygon is expandedreaching a bigger contact area [12] This expansion of thecontact area sets the roverrsquos Center of Mass (CM) insidea bigger track base making it more robust against loadtransfers due to the interaction of internal and external forces
4 Kinematical Simulation on the TwoOperating Modes of Rocker-Bogie
In paper [12] the two operating modes of rocker-bogie weretested by the Solidworks software using their multibodydynamic motion analysis thus the data obtained of thesesimulations was contrasted with the static stability margin(ie Center of Gravity position) results
In order to implement the kinematical simulation onrocker-bogie system we use the Adams software to analysisand verify the two operating modes of rocker-bogie in twopredefined scenarios Scenario 1 where the terrain presentsobstacles of heights smaller than the vehicle wheelrsquos radiusScenario 2 where the terrain is mostly covered in obstaclesthat surpass the previously mentioned vehicle wheelrsquos radius
Moreover in order to comprehensively measure andverify the tipover stability of the two operating modes ofrocker-bogie on uneven terrain the rocker-bogie systemrsquosstability is expressed and evaluated in relation to each axislateral stability (stability in roll) directional stability (stabilityin yaw) and longitudinal stability (stability in pitch)
41 Simulation Results of Scenario 1 The 3D model wasdeveloped by Adams as shown in Figure 5 We set up foursegmented obstacles distributed on a flat surface the height
Figure 5 Kinematical simulation in scenario 1
Original RBCM_positionHigh-speed RBCM_position
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
140
145
150
155
Leng
th (m
)
Figure 6 Vertical position variation of the vehiclersquos CM
Table 1 Simulation parameters of the rocker-bogie suspension
Parameters ValueIntegral dimension (mm) 2760 lowast 2300 lowast 1015
Total weight (Kg) 330 (no-load)Wheel diameter (mm) 500Wheel width (mm) 350Damping 15Stiffness coefficient (Nmm) 105
Dynamic friction coefficient 119891119889
05Static friction coefficient 119891
11990408
Dynamic friction translation velocity 119881119889
(mms) 10
Static friction slip velocity 119881119904(mms) 01
of every obstacle is 150mmwhich is less than the radius of thewheel and thewheel rotation speed is 100 degsThe technicalparameters of the rocker-bogie suspension are shown inTable 1 The dynamic performance curve is shown in Figures7 8 and 9 The solid red line in the graph describes thedynamic performance of original configuration the dashedblue lines describe the dynamic performance of high-speedtraversal configuration
The vertical direction of the main bodyrsquos Center of Massis shown in Figure 6 and the data in Figure 6 is shown inTable 2 After 12 seconds of simulation run all six wheels ofthe vehicle are engaging obstacles in the rugged topographyof the terrain
International Journal of Aerospace Engineering 5
High-speed RBYAWOriginal RBYAW
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(a)
High-speed RBPITCHOriginal RBPITCH
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(b)
High-speed RBPROLLOriginal RBROLL
300100 150 200 2505000Time (sec)
minus30
minus20
minus10
0
10
Ang
le (d
eg)
(c)
Figure 7 Yaw pitch and roll angular variation of the main body (a) yaw angular variation of the main body (b) pitch angular variation ofthe main body and (c) roll angular variation of the main body
Table 2 Data from the CMrsquos vertical position variation
Original conf High-speedtraversal conf
Minimum value of CMrsquosheight (mm) 142065 142064
Maximum value of CMrsquosheight (mm) 152557 149098
CMrsquos height variation range(mm) 10492 7034
The variation of CM displacement in the process is thebasis of the stability evaluation of all-terrain mobile robotswhich will generally affect the stability of the structure Fromthe table the alterations of CM displacement for originalconfiguration are one point five times those of high-speedtraversal configuration Overall the latter perform better
The curve of the yaw pitch and roll angular variation ofthe main body is shown in Figure 7 and the data in Figure 7is shown in Table 3
The variation ranges of yaw pitch and roll in the processdirectly affect the vehicle stability as the result shows thatthe three-variation range is about 50 higher than that of
high-speed mode The smaller the angle change the little theprobability that the vehicle will tip over
The variation of velocity acceleration angular velocityand angular acceleration of the main body is shown inFigure 8 and the data in Figure 8 is shown in Table 4
Through contrast analysis we can see that the all indica-tors variation ranges of the rocker-bogie high-speed traversalconfiguration are smaller than the one of the rocker-bogieoriginal configuration and the curve of the high-speed con-figuration changes more gently without violent alterationswhile in the curve of the original configuration there existsignificant alterations whichmay cause the vehicle to tip overThus we draw the conclusion that the high-speed traversalconfiguration is more stable than the original configurationmaking it more suitable for this proposed scenario
42 Simulation Results of Scenario 2 Traversability reflectsthe mobile robotrsquos ability to adapt to significant rough ter-rains Mobile robots will be challenged with various obstacleson the road with the ones that are perpendicular to thesurface being the most severe Therefore the ability ofthe mobile robot to overcome vertical obstacles reflects itstraversability capabilities For this purpose we developed the
6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
For a consistent formulation the 119901119894parameters are
numbered in ascending order following a right-hand rulewhere the thumb is directed downwards along the gravityvector that is the ground contact points are numbered inclockwise order when viewed from above The lines whichjoin the ground contact points are the candidate tipovermodeaxes 119886
119894 and the set of these lines will be referred to as the
support polygonIn order to increase the systemrsquos stability margin 120573
119878 we
should maximize the value of the product of 120579119894 119889119894 and
119891119903 As shown in Figure 4 the force-angle stability metric
of the middle wheel is the minimum value as we proposedpreviously Therefore we select the middle wheel of the twoconfigurations as a focus point
In the same condition the value of the resultant forcethat acts on the original configuration 119891
119903 is equal to
the value of the resultant force that acts on the high-speedtraversal configuration 1198911015840
119903 However the included angle 120579
1
and the vertical dimension of original configuration 1198891 are
smaller than the values 12057910158401and 1198891015840
1 of the high-speed traversal
configuration therefore the stability margin of the originalconfiguration 120573
119878 is smaller than the high-speed traversal
configuration 1205731015840119878
Based on the analysis above the rocker-bogie suspensionmechanismhas a greater stabilitymargin after the high-speedtraversal enhancement making it more stable while travelingat high speed Moreover when the 45-degree rotation of thebogie is completed the roverrsquos support polygon is expandedreaching a bigger contact area [12] This expansion of thecontact area sets the roverrsquos Center of Mass (CM) insidea bigger track base making it more robust against loadtransfers due to the interaction of internal and external forces
4 Kinematical Simulation on the TwoOperating Modes of Rocker-Bogie
In paper [12] the two operating modes of rocker-bogie weretested by the Solidworks software using their multibodydynamic motion analysis thus the data obtained of thesesimulations was contrasted with the static stability margin(ie Center of Gravity position) results
In order to implement the kinematical simulation onrocker-bogie system we use the Adams software to analysisand verify the two operating modes of rocker-bogie in twopredefined scenarios Scenario 1 where the terrain presentsobstacles of heights smaller than the vehicle wheelrsquos radiusScenario 2 where the terrain is mostly covered in obstaclesthat surpass the previously mentioned vehicle wheelrsquos radius
Moreover in order to comprehensively measure andverify the tipover stability of the two operating modes ofrocker-bogie on uneven terrain the rocker-bogie systemrsquosstability is expressed and evaluated in relation to each axislateral stability (stability in roll) directional stability (stabilityin yaw) and longitudinal stability (stability in pitch)
41 Simulation Results of Scenario 1 The 3D model wasdeveloped by Adams as shown in Figure 5 We set up foursegmented obstacles distributed on a flat surface the height
Figure 5 Kinematical simulation in scenario 1
Original RBCM_positionHigh-speed RBCM_position
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
140
145
150
155
Leng
th (m
)
Figure 6 Vertical position variation of the vehiclersquos CM
Table 1 Simulation parameters of the rocker-bogie suspension
Parameters ValueIntegral dimension (mm) 2760 lowast 2300 lowast 1015
Total weight (Kg) 330 (no-load)Wheel diameter (mm) 500Wheel width (mm) 350Damping 15Stiffness coefficient (Nmm) 105
Dynamic friction coefficient 119891119889
05Static friction coefficient 119891
11990408
Dynamic friction translation velocity 119881119889
(mms) 10
Static friction slip velocity 119881119904(mms) 01
of every obstacle is 150mmwhich is less than the radius of thewheel and thewheel rotation speed is 100 degsThe technicalparameters of the rocker-bogie suspension are shown inTable 1 The dynamic performance curve is shown in Figures7 8 and 9 The solid red line in the graph describes thedynamic performance of original configuration the dashedblue lines describe the dynamic performance of high-speedtraversal configuration
The vertical direction of the main bodyrsquos Center of Massis shown in Figure 6 and the data in Figure 6 is shown inTable 2 After 12 seconds of simulation run all six wheels ofthe vehicle are engaging obstacles in the rugged topographyof the terrain
International Journal of Aerospace Engineering 5
High-speed RBYAWOriginal RBYAW
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(a)
High-speed RBPITCHOriginal RBPITCH
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(b)
High-speed RBPROLLOriginal RBROLL
300100 150 200 2505000Time (sec)
minus30
minus20
minus10
0
10
Ang
le (d
eg)
(c)
Figure 7 Yaw pitch and roll angular variation of the main body (a) yaw angular variation of the main body (b) pitch angular variation ofthe main body and (c) roll angular variation of the main body
Table 2 Data from the CMrsquos vertical position variation
Original conf High-speedtraversal conf
Minimum value of CMrsquosheight (mm) 142065 142064
Maximum value of CMrsquosheight (mm) 152557 149098
CMrsquos height variation range(mm) 10492 7034
The variation of CM displacement in the process is thebasis of the stability evaluation of all-terrain mobile robotswhich will generally affect the stability of the structure Fromthe table the alterations of CM displacement for originalconfiguration are one point five times those of high-speedtraversal configuration Overall the latter perform better
The curve of the yaw pitch and roll angular variation ofthe main body is shown in Figure 7 and the data in Figure 7is shown in Table 3
The variation ranges of yaw pitch and roll in the processdirectly affect the vehicle stability as the result shows thatthe three-variation range is about 50 higher than that of
high-speed mode The smaller the angle change the little theprobability that the vehicle will tip over
The variation of velocity acceleration angular velocityand angular acceleration of the main body is shown inFigure 8 and the data in Figure 8 is shown in Table 4
Through contrast analysis we can see that the all indica-tors variation ranges of the rocker-bogie high-speed traversalconfiguration are smaller than the one of the rocker-bogieoriginal configuration and the curve of the high-speed con-figuration changes more gently without violent alterationswhile in the curve of the original configuration there existsignificant alterations whichmay cause the vehicle to tip overThus we draw the conclusion that the high-speed traversalconfiguration is more stable than the original configurationmaking it more suitable for this proposed scenario
42 Simulation Results of Scenario 2 Traversability reflectsthe mobile robotrsquos ability to adapt to significant rough ter-rains Mobile robots will be challenged with various obstacleson the road with the ones that are perpendicular to thesurface being the most severe Therefore the ability ofthe mobile robot to overcome vertical obstacles reflects itstraversability capabilities For this purpose we developed the
6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
High-speed RBYAWOriginal RBYAW
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(a)
High-speed RBPITCHOriginal RBPITCH
minus30
minus20
minus10
0
10
Ang
le (d
eg)
300100 150 200 2505000Time (sec)
(b)
High-speed RBPROLLOriginal RBROLL
300100 150 200 2505000Time (sec)
minus30
minus20
minus10
0
10
Ang
le (d
eg)
(c)
Figure 7 Yaw pitch and roll angular variation of the main body (a) yaw angular variation of the main body (b) pitch angular variation ofthe main body and (c) roll angular variation of the main body
Table 2 Data from the CMrsquos vertical position variation
Original conf High-speedtraversal conf
Minimum value of CMrsquosheight (mm) 142065 142064
Maximum value of CMrsquosheight (mm) 152557 149098
CMrsquos height variation range(mm) 10492 7034
The variation of CM displacement in the process is thebasis of the stability evaluation of all-terrain mobile robotswhich will generally affect the stability of the structure Fromthe table the alterations of CM displacement for originalconfiguration are one point five times those of high-speedtraversal configuration Overall the latter perform better
The curve of the yaw pitch and roll angular variation ofthe main body is shown in Figure 7 and the data in Figure 7is shown in Table 3
The variation ranges of yaw pitch and roll in the processdirectly affect the vehicle stability as the result shows thatthe three-variation range is about 50 higher than that of
high-speed mode The smaller the angle change the little theprobability that the vehicle will tip over
The variation of velocity acceleration angular velocityand angular acceleration of the main body is shown inFigure 8 and the data in Figure 8 is shown in Table 4
Through contrast analysis we can see that the all indica-tors variation ranges of the rocker-bogie high-speed traversalconfiguration are smaller than the one of the rocker-bogieoriginal configuration and the curve of the high-speed con-figuration changes more gently without violent alterationswhile in the curve of the original configuration there existsignificant alterations whichmay cause the vehicle to tip overThus we draw the conclusion that the high-speed traversalconfiguration is more stable than the original configurationmaking it more suitable for this proposed scenario
42 Simulation Results of Scenario 2 Traversability reflectsthe mobile robotrsquos ability to adapt to significant rough ter-rains Mobile robots will be challenged with various obstacleson the road with the ones that are perpendicular to thesurface being the most severe Therefore the ability ofthe mobile robot to overcome vertical obstacles reflects itstraversability capabilities For this purpose we developed the
6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
Original RBCM_velocityHigh-speed RBCM_velocity
dynamic_rocker_bogie
0
015
030
045
060
075
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(a)
Original RBCM_accelerationHigh-speed RBCM_acceleration
dynamic_rocker_bogie
0
100
200
300
400
500
Velo
city
(ms
ec)
50 100 150 200 250 30000Time (sec)
(b)
Original RBCM_angular_velocityHigh-speed RBCM_angular_velocity
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
50
100
150
200
250
Velo
city
(ms
ec)
(c)
High-speed RBCM_angular_accelerationOriginal RBCM_angular_acceleration
dynamic_rocker_bogie
50 100 150 200 250 30000Time (sec)
0
5000
10000
15000
20000
25000
Velo
city
(ms
ec)
(d)
Figure 8 Velocity acceleration angular velocity and angular acceleration variation of the main body (a) velocity variation of themain body(b) acceleration variation of the main body (c) angular velocity variation of the main body and (d) angular acceleration variation of the mainbody
Table 3 Data from yaw pitch and roll angular variation
Original conf High-speed traversal confMinimum value of yaw angle (∘) minus265 minus177Maximum value of yaw angle (∘) 052 021Yaw angle variation range (∘) 317 198Minimum value of pitch angle (∘) minus411 minus275Maximum value of pitch angle (∘) 203 165Pitch angle variation range (∘) 614 440Minimum value of roll angle (∘) minus176 minus119
Maximum value of roll angle (∘) 163 107Roll angle variation range (∘) 339 226
terrain shown in Figure 9 Every obstacle is perpendicularto the ground the first barrierrsquos height is 180mm and thenevery barrierrsquos height is 20mm taller than the previous oneThe technical parameters of the rocker-bogie suspension arethe same as the ones previously mentioned in Section 41
The final state of the simulation is shown in Figure 10Thehigh-speed traversal configuration can cross the barrier of
280mm but the bogie overturned when crossing the barrierof 300mm as a result the robot can no longer go any furtherHowever the original configuration can cross the barrier of400mm without any tipover situation but the rear wheelswere stuck when climbing the barrier of 420mm
The distance between the front wheel and the center ofthe bogie in the original configuration is longer compared
International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
Table 4 Data from the velocity acceleration angular velocity and angular acceleration variation
Original conf High-speed traversal confMinimum value of velocity (ms) 016 029Maximum value of velocity (ms) 062 054Velocity variation range (ms) 046 025Minimum value of acceleration (ms2) 006 033Maximum value of acceleration (ms2) 5161 1011Acceleration variation range (ms2) 5155 978Minimum value of angular velocity (degs) 002 007Maximum value of angular velocity (degs) 2065 1125Angular velocity variation range (degs) 2063 1118Minimum value of angular acceleration (degs2) 754 2155Maximum value of angular acceleration (degs2) 154971 89202Angular acceleration variation range (degs2) 154217 87047
Figure 9 Kinematical simulation in scenario 2
Figure 10 Final state of simulation in scenario 2
to the one of the high-speed traversal configuration Thefront wheel needs to have a greater force which leads tosignificant variations of the front wheelrsquos torque causingvehicle overturnWe show in Figure 11 the variation of torquein the front wheel
As we can see in Figure 11 when the obstacle heightis lower than the wheel radius the front wheel torques ofthe two configurations have differences but they not verysignificant When the obstaclersquos height is gradually higherthan the wheelrsquos radius the torque differences between thetwo configurations become more and more noticeable Thevariation in the high-speed traversal configuration torquebecomes more and more significant and violent when thetorque variation of the front wheel exceeds a certain limitvehicle tipover happens
Through the analysis from above it is clear that thehigh-speed traversal configuration has better dynamic per-formance in terrains with minor obstacles but when it faces
HRB right front wheel torqueORB right front wheel torque
100020003000400050006000700080009000
Leng
th (m
)
20001000 150050000Time (sec)
dynamic_rocker_bogie
(a)
HRB left front wheel torqueORB left front wheel torque
500 1000 150000Time (sec)
100020003000400050006000700080009000
Leng
th (m
)
dynamic_rocker_bogie
(b)
Figure 11 Torque variation of the frontwheel (a) torque variation ofthe right front wheel and (b) torque variation of the left front wheel
significant obstacles especially when the obstaclersquos height isbigger than wheelrsquos radius the original configuration has bet-ter performance than the high-speed traversal configurationthat is why we need to keep the two modes of operation
8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
5 Conclusion
In this paper our works focus on the two fields (1) analysisof the dynamic stability margin for high-speed traversalenhancement of rocker-bogie (2) kinematical simulationon the two operating mode of rocker-bogie The idea onerocker-bogie system with two modes of operation is usefulto increase the effectiveness and efficiency of the all-terrainmobile robots This structural enhancement can make therocker-bogie more adaptable and efficient in situations thatrequire high-speed traversal or dealing with surfaces thatneed a more robust performance over tough obstacles
As for the future work we plan to extend our researchto a field experimentations stage using a testbed vehicleprototype to contrast and compare the obtained simulationresults with practical observations of the proposed systemrsquosbehavior aiming to continue strengthening the vehiclersquosstability
Competing Interests
The authors declare that they have no competing interests
References
[1] S C Peters and K Iagnemma ldquoStability measurement of high-speed vehiclesrdquo Vehicle System Dynamics vol 47 no 6 pp 701ndash720 2009
[2] F Michaud D Letourneau M Arsenault et al ldquoMulti-modallocomotion robotic platform using leg-track-wheel articula-tionsrdquo Autonomous Robots vol 18 no 2 pp 137ndash156 2005
[3] J K Erickson ldquoLiving the dreammdashan overview of the Marsexploration projectrdquo IEEE Robotics amp Automation Magazinevol 13 no 2 pp 12ndash18 2006
[4] B Chen R Wang Y Jia L Guo and L Yang ldquoDesign of a highperformance suspension for lunar rover based on evolutionrdquoActa Astronautica vol 64 no 9-10 pp 925ndash934 2009
[5] A Meghdari H N Pishkenari A L Gaskarimahalle S HMahboobi and R Karimi ldquoA novel approach for optimaldesign of a rover mechanismrdquo Journal of Intelligent and RoboticSystems vol 44 no 4 pp 291ndash312 2005
[6] K Nagatani A Yamasaki Y Kazuya and T Asachi ldquoDevel-opment and control method of six-wheel robot with rockerstructurerdquo in Proceedings of the IEEE International Workshopon IEEE Safety Security and Rescue Robotics (SSRR rsquo07) RomeItaly September 2007
[7] F Le Menn P Bidaud and F Ben Amar ldquoGeneric differentialkinematic modeling of articulated multi-monocycle mobilerobotsrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo06) pp 1505ndash1510 May 2006
[8] C Distante G Indiveri andG Reina ldquoAn application ofmobilerobotics for olfactory monitoring of hazardous industrial sitesrdquoIndustrial Robot vol 36 no 1 pp 51ndash59 2009
[9] T Brooks G Gold and N Sertic Dark Rover Rocker-BogieOptimization Design Thomas 2011
[10] D PMiller andT-L Lee ldquoHigh-speed traversal of rough terrainusing a rocker-bogie mobility systemrdquo in Space pp 428ndash4342002
[11] E Garcia J Estremera and P Gonzalez de Santos ldquoA compara-tive study of stability margins for walking machinesrdquo Roboticavol 20 no 6 pp 595ndash606 2002
[12] H A Yang L C V Rojas C K Xia and Q Guo ldquoDynamicrocker-bogie a stability enhancement for high-speed traversalrdquoIAES International Journal of Robotics and Automation (IJRA)vol 3 no 3 pp 212ndash220 2014
[13] E G Papadopoulos and D A Rey ldquoA new measure of tipoverstability margin for mobile manipulatorsrdquo in Proceedings of the13th IEEE International Conference on Robotics andAutomationpp 3111ndash3116 April 1996
[14] E Papadopoulos and D A Rey ldquoThe force-angle measureof tipover stability margin for mobile manipulatorsrdquo VehicleSystem Dynamics vol 33 no 1 pp 29ndash48 2000
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of








![Modular Reconfigurable Robots in Space Applicationsmodlab.seas.upenn.edu/publications/space.pdfThe rocker-bogie mechanism is well documented and proven in a Mars rover [24] used to](https://img.pdfslide.us/doc/110x75/606f98d2e945337f552236a8/modular-reconfigurable-robots-in-space-the-rocker-bogie-mechanism-is-well-documented.jpg)