Embed Size (px)
Citation preview

This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 193.205.81.18
This content was downloaded on 21/08/2015 at 16:00
Please note that terms and conditions apply.
Self-assembly of polydimethylsiloxane structures from 2D to 3D for bio-hybrid actuation
View the table of contents for this issue, or go to the journal homepage for more
2015 Bioinspir. Biomim. 10 056001
(http://iopscience.iop.org/1748-3190/10/5/056001)
Home Search Collections Journals About Contact us My IOPscience

Bioinspir. Biomim. 10 (2015) 056001 doi:10.1088/1748-3190/10/5/056001
PAPER
Self-assembly of polydimethylsiloxane structures from 2D to 3D forbio-hybrid actuation
LVannozzi1, L Ricotti1,MCianchetti1, CBearzi2,3, CGargioli4, R Rizzi2,3, PDario1 andAMenciassi1
1 The BioRobotics Institute, Scuola Superiore Sant’Anna, Pontedera (PI), Italy2 Cell Biology andNeurobiology Institute, National ResearchCouncil of Italy, Rome, Italy3 IRCCSMultiMedica,Milan, Italy4 Department of Biology, University of RomeTorVergata, Rome, Italy
E-mail: [email protected]
Keywords: bio-hybrid actuation, engineered bio/non-bio interfaces, 3D self-assembled structures, livingmachines
Supplementarymaterial for this article is available online
AbstractThis work aims to demonstrate the feasibility of a novel approach for the development of 3D self-assembled polydimethylsiloxane structures, to be used as engineered flexiblematrices for bio-hybridactuation.We described the fabrication of engineered bilayers, organized in a 3D architecture bymeans of a stress-induced rollingmembrane technique. Such structures were providedwith ad hocsurface topographies, for both cell alignment and cell survival aftermembrane rolling.We reportedthe results of advancedfinite elementmodel simulations, predicting the systembehavior in terms ofoverall contraction, induced by the contractile activity ofmuscle cells seeded on themembrane. Then,we tested in vitro the structurewith primary cardiomyocytes to evaluate the real bio-actuatorcontraction, thus validating the simulation results. At a later stage, we provided the samples with astablefibronectin coating, by covalently binding the protein on the polymer surface, thus enablinglong-term cultures withC2C12 skeletalmuscle cells, amore controllable cell type. These tests revealedcell viability and alignment on the rolled structures, but also the ability of cells to differentiate and toformmultinucleated and orientedmyotubes on the polymer surface, also supported by a fibroblastfeeder layer. Our results highlighted the possibility of developing 3D rolled PDMS structures,characterized by differentmechanical properties, as novel bio-hybrid actuators.
1. Introduction
One of the most important functions that characterizea moving system is its actuation strategy. Manytechnological efforts have allowed to possess nowadaysseveral artificial actuation solutions [1]. However,different factors currently limit actuator performancesand their application in specific fields. Bioroboticsystems, for example, show peculiar requirements interms of actuation strategies. Miniature medicalrobots, flexible surgical instruments, advanced andbiomimetic prosthetic limbs and other devices wouldstrongly benefit from advancements in the actuationdomain. Among the limitations of current actuators,lack of stiffness control, poor scalability at small scales,high power consumptions and no self-healing proper-ties are the most significant ones [2]. Recently, the useof contractile muscle cells has represented a promising
solution to bypass these issues. In fact, the possibilityto directly use muscle cells could permit to achieveactuation components almost matching natural mus-cle properties [3]. Other approaches, such as shapememory alloys [4], electro-active polymers (EAP) [5]or carbon-nanotube-based systems [6] have beenexplored in order to emulate the functionality of anin vivomuscle, but their properties are currently far towellmimicmuscle performances [7–9].
Muscles are linear actuators capable of large dis-placements and a stiffness control in a wide range [10].A peculiar characteristic that distinguishes themrespect to other actuation means is intrinsic their scal-ability. Muscles allow an efficient organization ofactuation units in a range frommicrometers tometers.Muscles are long-lasting thanks to their high life cycleand possess integrated sensors (e.g. the muscle spin-dles) which assure accuracy and repeatability. They
RECEIVED
24April 2015
REVISED
8 July 2015
ACCEPTED FOR PUBLICATION
21 July 2015
PUBLISHED
20August 2015
© 2015 IOPPublishing Ltd

work by consuming renewable chemical energy pro-duced by glucose and oxygen, highly available in nat-ure, while the wastes are biodegradable products, suchas carbon dioxide. Nowadays, the possibility to exploitall these advantages is no longer far from reality [11–13]. Muscle cell-based actuators could power adap-table and self-healing devices, characterized by ‘life-like’ movements and able to overcome most of thelimitations affecting current actuation strategies. Thisnew actuation means could be beneficial for manytechnological applications [3, 14] and it may enable ina near future the development of more flexible anddexterous robots, able to perform challengingtasks [15, 16].
Recently, a significant number of studies on bio-hybrid actuation showed up, thus increasing the pro-mises of achieving a usable bio-hybrid system. Thefirst relevant work in this field was represented by aswimming robot, actuated by means of two explantedfrog semitendinosus muscles, able to swim for manyhours while maintaining a good efficiency [17]. Fur-ther studies followed, by exploiting the contractileproperties of different types of muscle cells: sponta-neous contraction of primary cardiomyocytes[18, 19], dorsal vessel insect tissues [20, 21] and con-trollable mammalian or insect skeletal muscle cells[22–24].
Engineering challenges involve the integration of acontrol system allowing cell contractile action to betriggered and regulated. In this context, skeletal mus-cle cells represent an optimal solution, because theyare highly controllable, in particular by means of opti-cal [25] or electrical stimuli [26]. A key feature of abio-hybrid actuation system should be the ability tomimic the 3D fascicle structures of natural muscle tis-sues [27–29]. However, the majority of bio-hybrid lit-erature examples report 2D systems, in the form ofmembranes and thinfilms [19, 27, 30–34].
Recently, a bio-robot mimicking the structure andthe kinematics of a ‘medusoid’ [35] and a bio-hybridswimmer [36] were developed.Moreover, 3D printingtechniques were exploited to fabricate walking biolo-gical machines based on cardiomyocytes and C2C12skeletal muscle cells for uni-directional move-ment [37, 38].
The main challenge still remains the developmentof controllable 3D skeletal muscle-based in vitro con-structs. This can be achieved by following two mainstrategies: (i) by providing 3D scaffolds with a vascu-lature, in order to keep cell viability in the inner partsof the construct; (ii) by organizing 2D materials in 3Dstructures which organize and keep cells viable thanksto their architecture, without the need of a bio-artifi-cial vasculature. Concerning the first strategy, severalresearch efforts are currently ongoing to createpseudo-vascularized biomaterials for skeletal muscletissue engineering [39]. However, we are quite farfrom obtaining optimal results as regards the integra-tion of a vasculature system allowing an efficient
transport of oxygen, glucose, nutrients and waste pro-ducts [40]. Although exciting results have beenrecently achieved in the field of 3Dmuscle tissue engi-neering [41], the lack of a real capillary blood flow dee-ply limits the long-term stability of muscle constructs.Concerning the second strategy, some techniques per-mit to relatively easily move from simple 2D patternsto complex 3D ones, through self-assembly [42]. Thiskind of approach could allow to bypass the vascular-ization issues that affect 3D constructs. To the best ofauthors’ knowledge, no bio-actuators based on 3Dself-assembled rolled structures have been proposed,so far.
In this paper, we describe the fabrication of 3Dtubular self-assembled polymeric structures used asmatrices for the development of bio-hybrid actuators.We report the results obtained in terms of fabricationprocedure, substrate characterization, surface functio-nalization and cell culture tests. Furthermore, we showthe insights achieved by performing advanced finiteelement model (FEM) simulations, which are vali-dated by experimental results and highlight the poten-tial of these systems for bio-hybrid actuation.
2.Materials andmethods
In this section we describe the materials and meth-odologies to fabricate and characterize the polymericstructures, to chemically functionalize their surfaces,to assess cell behavior by means of in vitro assays, topredict the system performance bymeans of advancedsimulations and to validate the simulation results.
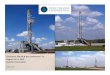
2.1.Membrane fabrication and assemblyThe engineered structures were fabricated in polydi-methylsiloxane (PDMS, Sylgard 184, Dow Corning), abiocompatible, transparent and elastic polymer. Toobtain a relatively wide range of elastic moduli forbetter matching the tissue elastic modulus, PDMS wasprepared in different monomer/curing agent ratios(5:1, 10:1, 15:1 and 20:1 w/w). Thin films werefabricated by spin-assisted deposition (SPIN150, SPSEurope). Allfilmswere spinned for 60 s; differentfilmsthicknesses were obtained by varying spin velocity(from 500 rpmup to 5000 rpm). The strategy followedfor the assembly of engineered PDMS matrices wasbased on the stress-induced rollingmembrane (SIRM)technique [42] (figures 1(a)–(d)), which permitted toobtain tubular rolled structures from a 2D pattern,characterized by two merged layers provided withdifferent surface topographies. This approach, basedon the release of internal stresses induced by thestretching of the top layer, allowed the rolling of thewhole structure in absence of constraints at one end,once the two layers were bonded together. Thus, whilecell orientation was controlled on the 2D surface, thepatternswere assembled in a 3D structure.
2
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

We used polyvinyl alcohol (PVA, 98% hydrolized,Mw 13 000–23 000, Sigma-Aldrich) as a sacrificiallayer. PVA is a water-soluble polymer, used to facil-itate the detachment of thin membranes from Si sub-strates [43–45]. A PVA aqueous solution (1%wt.) wasspin-coated (4000 rpm for 20 s) on Si molds beforepouring the PDMS solution. Then, PDMS was spin-ned on the PVA layer and baked at 150 °C for 15 min:this permitted to obtain a rather robust and easy-to-manipulate structure (top layer), which could be stret-ched 40% of its initial length (figure 1(b)). The otherPDMS membrane (bottom layer) was baked at 80 °Cfor 195 s, by keeping it in a non-fully polymerized,semi-adhesive status. Then, the top layer (stretchedand clamped) was placed on top of the bottom one,and the whole bilayer was finally subjected to an addi-tional thermal treatment (80 °C for 30 min) to com-plete the polymerization, thus stabilizing its structure.The semicured (bottom) membrane assured a betteradhesion between the two PDMS layers during thisstep. The overall thickness of the PDMS bilayer wasthe sumof the thicknesses of each layer (figure 1(c)).
2.2. Fabrication of substratemicrotopographiesSubstrate topography represents a key feature of thestructure. In fact, matrix topographymust be properlydesigned to assure an anisotropic cell alignment alongone preferential direction, thusmaximizing cell fusionand force generation in the longitudinal axis direction(black arrow in figure 1(e)) [46].Moreover, during the
rolling, the different layers should be spaced in orderto avoid excessive stresses on cells; for this reason, thebottom layer was provided with spacing pillars thataimed at separating each concentric layer, thus max-imizing cell viability (figure 1(e)).
As a first step, two photolithographic masks weredesigned and subsequently printed on glass, to obtainthe desired topographies on Si wafers (400 μm thick, ptype, boron doped, ⟨100⟩, Silicon Materials, Kaufer-ing, Germany). In a class 1000 clean room, a negativeand a positive photoresist were used to fabricate themolds for PDMS bottom and top layer, respectively.For the top layer topography (parallel microgrooves),themolds were obtained by spinning aMicroposit pri-mer (3500 rpm for 30 s) before the positive resist(Shipley S1813, 4500 rpm for 35 s) on Si wafers. Afterpre-baking (120 °C for 1 min), the wafers wereexposed for 7 s to UV in hard-contact modality, bymeans of amask aligner (MA/BA6Gen3, SUSSMicro-Tec). After the post-baking (120 °C for 1 min) themasks were developed for 30 s in a developer solution(MF-319Developer,Microposit®).
For the bottom layer topography (rectangular pil-lars), a negative resist (SU-8 25, MicroChem) wasspinned on Si wafers by following two cycles: a spreadcycle to allow the resist to cover the entire surface(ramp to 500 rpm at 100 rpm s−1 acceleration, then 5 scycle) and a spin cycle, to obtain the desired thickness(ramp to 2000 rpm at a 300 rpm s−1 acceleration, then30 s cycle). Then, the wafers were pre-baked (65 °C for
Figure 1.Description of the SIRM technique. The top layer (a) was stretched (b) andmergedwith a non-stretched bottom layer (c).The bilayer, in absence of constraints at one extremity, started to roll (d), due to the release of the previously generated internalstresses. (e) CADdesign of the rolled PDMS structurewith pillars (red box, bottom layer) and grooves (green box, top layer)evidenced. The black arrow indicates themicro-grooves direction.
3
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

3 min and 95 °C for 7 min) and exposed for 6 s in soft-contact modality. A post exposure bake was per-formed to cross-link the exposed portions of the film(65 °C for 1 min and 95 °C for 3 min). Finally, thedevelopment was carried out in a SU-8 developer solu-tion for 4 min.
PDMS top and bottom layers were obtained byspinning the polymeric solution, as previously descri-bed, on these two Si mold types, previously providedwith a PVA sacrificial layer.
2.3. Characterization ofmembranes and rolledstructuresPDMS layer surfaces were imaged by means of atomicforcemicroscopy (AFM,Veeco) and scanning electronmicroscopy (SEM, EVO MA15, Zeiss Instrument).Before imaging, the samples were metallized bymeansof Au sputtering (sputtering current: 25 mA, sputter-ing time: 60 s). AFM scans were carried out in tappingmode by setting a 0.2 Hz scan frequency, 512 samplesper line and a 100 × 100 μm2 scan area. SEM scanswere performed by setting a beam voltage of 10 kV anda current of 200 pA.
The evaluation of membrane mechanical proper-ties was carried out by means of traction tests, using amechanical testing system (INSTRON 4464, equippedwith a± 10 N load cell). The elastic moduli werededuced from each stress/strain curve, according to astandard procedure [47]. For each specimen, a con-stant traction speed of 5 mmmin−1 was set until sam-ple failure. Data were recorded with a frequency of100 Hz. Ten independent specimens were tested, foreach sample type.
PDMS membrane thickness was assessed bymeans of a profilometer (KLA Tencor). For each spinvelocity and monomer/curing agent ratio, three inde-pendent samples were tested and their thickness valuesrecorded.
2.4. PDMS surface functionalizationPDMS is characterized by spontaneous hydrophobicrecovery [48]. This represents a critical issue, as cellsspontaneously detach from PDMS after few days, if nosurface treatment is provided. This phenomenon cancompromise the long-term adhesion of muscle cells tothe substrate. Different methods are reported in theliterature to make PDMS surfaces hydrophilic [49].Oxygen plasma allows to graft hydrophilic functionalgroups onto PDMS.However, it is difficult tomaintainthis condition for several days.
Instead, a natural cross-linker for proteins, such asgenipin [50], can prevent PDMS hydrophobic recov-ery, thus improving the long-term adhesion of musclecells on PDMS layers, as previously demonstrated[51]. Such chemical functionalization protocol wasused to provide the PDMSmatrix with a stable proteincoating on the top layer and to guarantee a long-lastingbio-actuation system. In brief, PDMS samples were
incubated in a solution of 60% ethanol, 20% (3-ami-nopropyl) triethoxysilane and 1.2% NH3 (pH= 9) for3 h at 60 °C. Then, they were incubated with a5 mgml−1 genipin (Sigma-Aldrich) solution in purewater (Milli-Q, Millipore) for 60 min at 37 °C. Weincubated the samples immersed in a 25 μg ml−1 fibro-nectin (Sigma-Aldrich) solution in pure water at 37 °Cfor 1 h and subsequently we kept them at 4 °Covernight.
By using fluorescent fibronectin, it was possible tomonitor the presence of this protein on the functiona-lized substrates, overtime. Protein labeling wasobtained by using the Oregon Green 488 ProteinLabeling Kit (Invitrogen-Molecular Probes©). Thestructures, during this experiment, were maintainedin phosphate buffered saline (PBS) solution, whichwas renewed every day. Fluorescence images wereacquired at different days (day 2, 3, 6, 9 and 13) bymeans of an inverted fluorescence microscope(Eclipse Ti, FITC-TRITC filters, Nikon), equippedwith a CCD camera (DS-5MCUSB2, Nikon) and withNIS Elements imaging software. Images were then ela-borated by using ImageJ, a free software available athttp://rsbweb.nih.gov/ij/.
2.5. Cell cultures and in vitro assaysCardiomyocytes (CMs) were used to evaluate thecontraction ability of the rolled PDMS structure. CMswere isolated from hearts of 1-day-old CD-1 neonatalmice (Charles River Laboratories). After excision,whole hearts were transferred into ice-cold HanksBalanced Salt Solution (HBBS) and the blood gentlysqueezed out. The hearts were then minced into fourpieces in 0.1 mg ml−1 trypsin (Sigma-Aldrich) supple-mented with 20 mgml−1 of deoxyribonuclease I(DNAse I, Sigma-Aldrich), and pre-digested overnightat 4 °C. The following day, trypsin was removed andthe myocardial pieces incubated in 0.5 mg ml−1 col-lagenase (Worthington Biochemical) solution con-taining DNAse I with intermittent pipetting alongwith shaking at 37 °C in a water bath for 3 min Thesupernatant, containing free cells, was then collectedand kept on ice. The digestion step was repeated threetimes. Cell suspensions from each digestion werepooled, filtered through a 70 μm strainer and centri-fuged at 800 rpm for 5 min at 4 °C. Cell pellet was thenresuspended in a maintenance medium composed byhigh glucose Dulbecco’s modified eagle medium(DMEM) supplemented with 10% horse serum (Invi-trogen), 5% fetal bovine serum (FBS), 10 mMHEPES(Invitrogen), 100 IU/ml penicillin, 100 μg ml−1 strep-tomycin and 2 mML-glutamine. The cells were platedand incubated at 37 °C for 3 h to allow the differentialattachment of non-myocytes, constituted mostly ofcardiac fibroblasts [52, 53]. The CMs-enriched sus-pensionwas seeded on gelatinized PDMS samples witha density of 150 000 cells/cm2 resuspended in 100 μl,in order to immediately reach confluence.
4
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

The evaluation of both viability and orientation ofcells on the substrates was carried out 24 h after cellseeding, by means of a Live/Dead® viability/cytotoxi-city assay (Invitrogen). Fluorescence images wereacquiredwith the inverted fluorescencemicroscope.
Further in vitro tests were performed by usingC2C12 murine skeletal myoblasts (ATCC®, CRL-1772) as muscle cell model and nHDFs (NormalHuman Dermal Fibroblast, Lonza, CC-2511). Thesetests were necessary to assess the ability of the functio-nalized PDMS substrates to induce cell alignment, tomaintain cell viability and to permit the formation ofmyotubes. The fibroblasts were used to create a feederlayer that could facilitate the development of con-tractile myotubes [54], providing a suitable mechan-ical interface over the PDMS surface. Both cell typeswere cultured in DMEM (EuroClone), with the addi-tion of 10% FBS (EuroClone), 100 IU/ml penicillin,100 μg ml−1 streptomycin and 2 mM L-glutamine.Cells were seeded onmicro-grooved PDMS samples ata density of 75 000 cells/cm2 for C2C12 and 10 000cells/cm2 for nHDFs, so that they could reach the con-fluence 24 h after seeding. To induce differentiationand fusion in myotubes, the cells were kept in differ-entiation medium, composed of DMEM with theaddition of 1% FBS, 1% insulin–transferrin–selenium(ITS, Sigma-Aldrich), 100 IU/ml penicillin,100 μg ml−1 streptomycin and 2 mML-glutamine.
Cell-seeded samples were maintained in an incu-bator with controlled conditions, namely at 37 °C in asaturated humidity atmosphere containing 95% airand 5%CO2. C2C12 cell viability and orientationwereassessed by means of the previously mentioned Live/Dead® assay. To assess the differentiation and thefusion in myotubes, samples seeded with only C2C12cells and samples seeded with nHDFs and, 24 h later,C2C12 cells on top of them, were kept in differentia-tion culture medium (renewed every day) till day 7from the induction of differentiation. Bright field ima-ges were taken at day 7 to assess the differentiation sta-tus. In addition, at the same end-point, cellsunderwent fixation (by incubating them with 4% par-aformaldehyde (PFA) 30 min at room temperature)and staining with fluorescentmarkers: Oregon Green®
488 phalloidin (Invitrogen), to stain F-actin, andDAPI (Invitrogen), to stain cell nuclei. Fluorescenceimages were then acquired by using a confocal micro-scope (Inverted Microscope TiE equipped with aNikon Confocal Laser System A1Rsi, Nikon). Thedegree of differentiation for C2C12 multinucleatedmyotubes was quantitatively evaluated by consideringthe fusion index. This parameter was determined bydividing the number of nuclei within myotubes by thetotal number of nuclei in the image. A larger fusionindex indicates a higher differentiation level and thusthe formation of a more mature muscle tissue [55].Three fluorescence images were analyzed for eachsample type.
The DNA content of C2C12 cells was analyzed48 h after seeding (24 h after rolling) to assess the abil-ity of cells to survive after the rolling the entire PDMSstructure. Two different configurations were com-pared: unrolled substrates seeded with 75 000 cells/cm2 and kept in culture for 48 h, and unrolled sub-strates (same dimensions of the previous ones), seededwith 75 000 cells/cm2, kept in culture for 24 h, thenrolled and kept in culture for further 24 h, in the rolledconfiguration. At the end-point (48 h from seeding)the samples were removed from the original cell cul-ture wells and placed in new wells, which were treatedwith 500 μl of d-H2O. Cell lysates were then obtainedby two freeze/thaw cycles of the samples (overnightfreezing at −20 °C and 15 min thawing at 37 °C in anultrasonication bath) to enable the DNA to go into theaqueous media. The DNA content in the cell lysateswas measured by using the PicoGreen kit (InvitrogenCo., Carlsbad, CA). The PicoGreen dye binds to DNA,and the resulting fluorescence intensity is directly pro-portional to the DNA concentration. Standard solu-tions of DNA in d-H2O at concentrations from 0 up to6 μg ml−1 were prepared and 50 μl of standard or sam-ple were loaded for quantification in a 96-well blackmicroplate. Working buffer and PicoGreen dye solu-tion were prepared and added according to the manu-facturer’s instructions (100 and 150 μl/well,respectively). After 10 min of incubation in the dark atroom temperature, fluorescence intensity was mea-sured on a microplate reader (Victor X3, PerkinElmer), using an excitation wavelength of 485 nm andan emission wavelength of 535 nm. Three indepen-dent samples were analyzed for each configuration,and the volume analyzed for each sample was read intriplicate in themicroplate.
2.6. FEMsimulationsTo envision the contraction behavior of the bio-hybridsamples, we carried out a series of FEM simulations.Finite element modeling allowed to predict the overallcontraction of rolled polymeric structures along theirmain axis, due to properly modeled muscle cellcontraction forces.
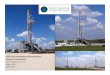
A specific FEM software, dedicated to the model-ing of nonlinear and complex soft bodies (MARC®/Mentat® 2010, MSC Software) was used to predict thesystem behavior. The bio-hybrid structure was vir-tually reproduced as a rolled 15 × 10 mm2 sheet, withbilayer thicknesses of 10, 15 and 25 μm, respectively(figure 2). The spiral internal radius was set by usingthe following formula [56]:
(
)
(
( )
(
( )
r k k k k k k k k
k k k k h
k k k
4 6 3
2 4 1) )/
6 1 , (1)
E h E h E h E h
E h E h t
E h h
2 4 3 2 20
0 0
0
ϵ
ϵ ϵ
ϵ
= + + −
− + + +
+
where kE= Et/Eb (Et andEb represent the elasticmoduliof the top and of the bottom layer, respectively),
5
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

kh= hb/ht (ht and hb represent the thickness of top andbottom layer, respectively), and ε0 represents theimposed stretching.
The presence of the pillars was taken into con-sideration by adding small parallelepipeds with size of0.03 × 0.06 × 0.30 mm3 each, while the micro-grooveswere neglected in this analysis (their height is muchlower respect the height of pillars, as later showed insection 3.1). The PDMS material was modeled byusing PENTA elements with full integration and themechanical characteristics of the material were setresembling the real ones. In particular, the elasticmodulus was set considering the values reported insection 3.3. The application of boundary conditionsrepresents a key element. Each cell was represented bythe use of a couple of forces (acting in opposite direc-tions) and applied with a specific pattern. The neces-sity to place the forces at precise points along thestructure required a specific mesh subdivision. Nodeswere placed at definite coordinates and used as pointswhere cell forces were applied. Exploiting system sym-metries, the computation burden was reduced by add-ing a symmetry plan at the half of the height andconsidering a quarter of the structure, thus allowingthe computation of a minor amount of the elementsstill maintaining unaltered the mechanical behavior.No motion conditions at one end were imposed. Thestructure height was also reduced, as it constituted arepetition of a pattern composed of pillars and forces.
Living contractile elements were modeled as90 × 60 μm2 (cardiomyocytes) and 250 × 50 μm2
(skeletalmyotubes) bodies (figure S1), with theirmainaxis aligned with the main axis of the rolled structure(black arrow infigure 1(e)).
For each cell, two force vectors were added, whichoriginated from cell extremities and pointed to the cellnucleus. During the simulation the forces were forcedto follow the structure deformation, so that they resultto be always tangential to the membrane surface. Nospacing was provided in the Y direction, while 90 and250 μmwere kept between two consecutive cells in theX direction respectively for cardiomyocytes and skele-tal myotubes (this was needed to avoid a mutual can-cellation of force components). Cell forcemoduli werederived from the stress value reported by Feinberg andcolleagues for primary cardiomyocytes, which was4 mNmm−2 [19], and the force reported by Shimizufor skeletal myotubes [57], that was 1 μN for eachmyotube.
2.7. Analysis of bio-hybrid system contractionThe overall contractile behavior of a rolled structureseeded with CMs was evaluated by means of a motionvector analysis program implemented in Matlab(Matlab 2012, Math Works), using the Horn–Schunkoptical flow method [58] applied on recorded videosof the contracting PDMS structure. This non-invasivetechnique is usually used to estimate flow velocitiesfrom a sequence of frames, showing the apparentmovement of brightness patterns in an image, and ithas been already used to quantify the contractilebehavior of CMs, as reported in the literature [59]. For
Figure 2.Whole spiral structure section (top images) and lateral view of a structure slice (bottom) for the rolled PDMS structuresanalyzed inMARC environment, referred to 10 μm(a), 15 μm(b) and 25 (c) μmbilayer thickness.
6
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

a sequence of 2D images, a pixel with coordinates (x, y)with a brightness intensity I(x, y) will move byΔx andΔy between two image frames; the following relation-ship applies:
I x y t I x x y y t t( , , ) ( , , ). (2)= + Δ + Δ + Δ
It follows that:
Ix Vx Iy Vy It* * , (3)+ = −
whereVx andVy are the components of the velocity ofI(x, y, t), while Ix, Iy and It are the derivatives of theimage at (x, y, t).
Three videos of the beating rolled CM-seededPDMS structure (1 min duration, each) were recordedby using an optical microscope and digitized at 100frames/s. Data were analyzed by considering themovement of each pixel, frame by frame, as a vector.The flow velocity had two components, but we wereinterested in the contraction along the X direction,which corresponded to the main axis of the rolledstructure (black arrow infigure 1(e)).
A rolled PDMS structure with a monomer/curingagent ratio of 15:1, a thickness of 25 μm and seededwith CMs (150 000 cells/cm2) was tested to validatethe bio-actuator performance and to compare it withFEM simulation results.
2.8. Statistical analysesData analysis was performed by analysis of variancefollowed by Student’s t-tests, in the case of comparisonbetween two groups, or by Holm-Sidak tests, in thecase of comparison between more than two groups.The significance thresholdwas set at 5%.
3. Results and discussion
3.1. PDMSmembranes: thickness and surfacetopographiesThe thickness of PDMS membranes with differentmonomer/curing agent ratios is shown in figure 3.Results demonstrated that the thickness of the bilayerstructure can be efficiently controlled by varying thespin velocity. In addition, greater is the mixing ratio,smaller is the thickness, by keeping the same velocity.In fact, by increasing the amount of the PDMS curingagent, the fluid results less viscous and it can spreadmore easily over Si wafers.
SEM and AFM imaging showed that the top layerwas characterized by grooves with a width of9.53 ± 0.37 μm, spaced by 10.59 ± 0.39 μm and∼1.3 μm high (figure 4(a)). This kind of topographyhas been demonstrated in the literature to improvemuscle cell alignment along the groove direction [60]and eventually to enhance the fusion of myoblasts inmyotubes [61]. An anisotropic cell distribution is ofprimary importance, since muscle cells aligned alongone direction permit to generate a force directed inthat direction, thus maximizing contraction. This iswhat happens in natural skeletalmuscles, which have astructural organization based on parallel musclefibers.
Instead, the bottom layer was provided with rec-tangular pillars characterized by a height of23.86 ± 0.67 μm, a width of 62.96 ± 1.03 μm and alength of 322.95 ± 1.32 μm (figure 4(b)). These pillarshave the aim of separating the concentric PDMS lay-ers, thus reducing the stress on cells during the sub-strate rolling phase and to assure the flow of culturemedium inside the inner channels, to keep cells aliveand to improve long-term cultures.
Figure 3.Thickness of PDMSmembranesmeasured after spinning the solution on 2 × 2 cm2 Si wafers. Three independent sampleswere fabricated andmeasured, for each spin velocity and eachmonomer/curing agent ratio.
7
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

3.2. Achievement of 3D structuresTo obtain the rolled PDMS structures, a step-by-stepprocedure was followed, by using a custom assemblysystem fabricated by means of traditional machiningtools.
The custom extraction, stretching, supporting (inDelrin) and clamping (in Teflon) system componentscontributed to increase the efficiency of the 3D rolledstructure fabrication procedure, when relatively thinPDMS structures were used. In fact, the detachment ofPDMS from the Si molds and its handling representedcritical issues when PDMS membrane thicknessdecreased. The use of PVA as sacrificial layer in aqu-eous environment allowed to apply rather limitedstresses on themembranes, while the custom assemblysystempermitted to efficiently carry on the procedure.
First, the PDMS top layer was detached from the Simold in deionized water after the dissolution of thePVA layer, and the floating membrane was collectedby means of the extraction system (figure 5(a)). Thiswas then coupled with the traction system(figure 5(b)) and the membrane was blocked at itsextremities. Then the extraction part was removed andthe layer was stretched by 40% of its initial length
(figure 5(c)). Top layer stretching was allowed by twoguide rails which secured the movement along onedirection, while two external clamps were screwed onthe traction system to block the stretched membranewhen desired. Subsequently, the semi-cured PDMSbottom layer, still attached to the Si mold, was placedbelow the stretched membrane by using the support-ing system (figure 5(d)). After a thermal treatment(80 °C for 30 s) to complete the PDMS polymeriza-tion, the bilayer was immersed in water, to detach thebottom Si mold (figure 5(e)). Then, the clamping sys-tem, provided with nylon screws, allowed to block thebilayer in its stressed status (figure 5(f)) and to intro-duce it in a standard 6-well plate for cell cultures(figure 5(g)), after sterilizing it (this was achieved bykeeping the whole structure for 30 min in a PBS solu-tion provided with a high concentration of penicillinand streptomycin). Finally, after cell culture, the sys-temwas extracted from the well, one of its end was cutand a rolled structure was obtained (figure 5(h),video S1).
By means of this step-by-step procedure, weobtained rolled PDMS structures with an Archime-dean spiral-like shape, characterized by the two
Figure 4.Analysis of top and bottom layer topographies. (a) SEM (left) andAFM(right) images showing the parallelmicrogroovesobtained for the top layer (profile in the red box); (b) SEM images highlighting the pillars obtained for the bottom layer.
8
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

mentioned topographies: a micro-grooved surface onthe internal walls and rectangular pillars on the exter-nal walls (figure 6).
3.3. Chemical functionalization andmechanicalcharacterizationBy analyzing fluorescence intensity, emitted by thelabeled fibronectin immobilized on the PDMS surface,we demonstrated that the genipin-based procedure
assured the maintenance of a stable coating for at least13 days (figure S2(a)). The green signal componentshowed no statistically significant variations. Thismeans that genipin-based chemical functionalizationallowed to maintain a stable fibronectin coating, thusassuring that muscle cells could remain adherent tothe PDMS substrate within this time-frame.
We also checked if such chemical functionaliza-tion procedure could influence the PDMSmechanical
Figure 5.Different phases of the fabrication procedure, supported by a custom assembly system. An extraction system (a) allowed tocollect the PDMSmembrane fromwater. A traction system (b) allowed to stretch it along the longitudinal axis (c). A supportingsystem (d) permitted the couplingwith the semi-cured bottom layer. After a thermal treatment, the PDMSbilayer was immersed inwater to detach the Si-support of the bottompart (e), blocked in its stressed status bymeans of a clamping system (f) and placed inculture (g).When desired, one endwas cut and a rolled structure obtained (h).
Figure 6. SEM image of a 3D rolled PDMS structure.
9
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

properties. Stiffness is one of the cues that influencemuscle cell behavior, especially their ability to formdifferentiated and functional skeletal myotubes.Moreover, in our case this feature conditioned sub-strate flexibility and, consequently, the bio-actuatorperformance. The aim would be, in fact, to obtain astiffness as low as possible for PDMS substrates, inorder to limit the mechanical opposition during thecontraction ofmuscle cells.We carried out tensile tests(figure S2(b)), in which we observed that the genipin-based treatment slightly increased the stiffness ofPDMS substrates (table 1).
The treatment with genepin increased the elasticmoduli of PDMS structures for each mixing ratio.However, for long-term cultures on PDMS substrateswe need to accept this compromise, since facing thehydrophobic recovery represents a crucial issue.
The gap with the stiffness value reported in the lit-erature for an optimal maturation of skeletal muscletissues (∼14 kPa [62]) is rather large. However, theoption to use higher monomer/curing agent ratios inorder to achieve lower elastic modulus values is hardlyfeasible in our case, due essentially to manipulabilityissues. In fact, the bottom PDMS layer of the structureis semi-cured and per se almost impossible to manip-ulate when its elastic modulus goes below ∼500 kPaand when its thickness goes below 10 μm. Therefore,we considered such values, 20:1 for themonomer/cur-ing agent ratio and 10 μm for the bilayer thickness ofthe bottom layer, as our limits.
It could be argued that these mechanical char-acteristics would represent a strong limitation for acorrect development of muscle tissue on these sub-strates. Anyhow, in the case of skeletal muscle cells, weenvisioned to overcome this issue by providing thesystem with a feeder layer of fibroblasts, on top ofwhich myoblasts can be seeded and differentiated.This strategy already proved to be effective in provid-ing muscle cells both with a suitable mechanical inter-face and with specific cytokines, produced byfibroblasts, which help muscle tissue maturation[31, 54]. Nonetheless, the force generation of myo-cytes was demonstrated also to be stiffness dependent,as on stiffer substrates cells make use of larger forcesand spread out across the substrate, leading to anuclear compression and an increase of the horizontal
component of contraction forces respect to the verticalone [63, 64].
3.4. FEMsimulationsSimulations performed in MARC environmentrevealed that, under the effect of the contraction forcesofmuscle cells, each rolled PDMS structure underwentan axial shortening. The bio-actuator overall contrac-tion depended on the cell type, on the PDMS elasticmodulus and on the bilayer thickness(figures 7(a), (b)).
Obviously, higher contraction values were assuredby the most flexible substrates, characterized by lowerelasticmoduli and/or thickness values. Results showedthat primary CMs would be able to contract the rolledPDMS structure up to∼25%of its initial length. Skele-talmuscle cells would assure amuch lower device con-traction (up to∼0.13%).
In silico differentiated skeletal myotubes showedlower contraction values due to the intrinsic difficultyto obtain mature and functional myotubes. However,future evolutions of the systemmay include both tech-nological and biological improvements. Concerningtechnological ones, the current boundaries of elasticmodulus and thickness may be expanded, by changingmaterial or by advancing the fabrication procedure.Concerning biological improvements, the differentia-tion of skeletal myotubes may be pushed, by means ofelectro-mechanical stimulation [65], intracellular sti-mulation [31] or other cell engineering techniques,thus achieving force values much higher than 1 μNandmore significant bio-actuator contractions.
3.5. In vitro testsFirst, we evaluated cell viability on PDMS surfaces,focusing our attention on the influence of topographyon cell behavior. Results showed that onmicrogroovedPDMS samples, the majority of CMs (figure 8(a)) andC2C12 cells (figure 8(b)) was viable (green-colored),while only a small percentage was dead or necrotic(red-colored). In addition, the presence of groovesinfluenced the orientation ofmuscle cells: they alignedalong the groove axis (highlighted by white arrows),thus exhibiting a high anisotropy.
Then, we evaluated the ability of C2C12 musclecells to differentiate and fuse into myotubes on thetreated substrates provided with grooved surfaces andchemically treated with genipin, in order to achieve astable fibronectin coating. In parallel, we studied co-cultures made of a layer of nHDFs below the C2C12muscle cell layer. These cultures weremaintained for 7days, by replacing the differentiation medium on adaily basis. Bright field and fluorescence (confocal)images (figure 8(c)) show that C2C12 cells formedhighly aligned myotubes, parallel to the groove direc-tion, at day 7. A high number of multinucleated struc-tures can be observed, thus highlighting the myogenicpotential of these substrates. Figure 8(d) shows bright
Table 1.Elasticmoduli for each PDMSmixing ratio, independentfrom thicknesses. The last column refers to the comparison betweenbare PDMS and genipin-treated PDMS samples for eachmixingratio: * = p< 0.05, ** = p< 0.01.
Mixing
ratio
Bare PDMS
elasticmod-
ulus (MPa)
Genipin-treated
PDMS elastic
modulus (MPa)
Statistical
comparison
5: 1 2.553 ± 0.087 2.619 ± 0.045 **
10: 1 1.808 ± 0.073 2.106 ± 0.095 **
15: 1 1.013 ± 0.068 1.308 ± 0.072 **
20: 1 0.573 ± 0.047 0.721 ± 0.040 **
10
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

field and fluorescence (confocal) images of the samePDMS substrates, previously seeded with fibroblasts,and thenwithC2C12 cells.
Co-cultures with fibroblasts aimed at enhancingthe C2C12 differentiation capability on PDMS sub-strates. From previous literature reports, it wasdemonstrated that a feeder layer of nHDFs was able toenhance the formation of multinucleated myotubes,both providing secretion of growth factors [54] and asofter layer closer to the optimal substrate stiffnessvalue for muscle differentiation (∼14 kPa) [62]. Thequantitative assessment of the C2C12 differentiationlevel was obtained by evaluating the fusion index(figure 8(e)). A statistically significant difference wasobserved after 7 days of culture in the differentiationmedium for C2C12 cells without (0.64 ± 0.04) andwith (0.76 ± 0.05) a supporting nHDFs layer. Fibro-blasts were able to support an efficient cell fusion,increase the differentiation ability of C2C12 cells andtheir ability to develop anisotropically multinucleatedmyotubes. The formation of more mature myotubeswill allow the development of contractile muscle cap-able to exert larger forces.
The rolling phase is the last step of the procedure.To evaluate the ability of cells to survive after rollingthe entire structure, C2C12 cells were seeded on the(stretched) top layer for 24 h, then the clamped system
was extracted from the 6-well plate and one extremitywas cut with a blade.When rolled up, the alignedmus-cle cells resulted longitudinally oriented and the pillarsseparated the membrane layers, thus providing suffi-cient space to keep cells alive. At this time-point, weevaluated the viability of C2C12muscle cells inside thetubular structure after rolling by means of the Live/Dead® kit. Figure 9(a) shows that the rolling did notcause evident damages on the cells, which remainedhighly viable, as demonstrated by the green-coloredconcentric cell layers (the image is a top view of thecell-seeded rolled structure).
The results of a quantitative analysis of DNA contentfor the unrolled and rolled structures are shown infigure 9(b). These results permitted to further demon-strate the viability of C2C12 cells even after the rollingphase. The DNA content measured for rolledPDMS structures (4.42±1.17 μgml−1) was slightlysmaller than the one measured for unrolled structures(5.61±1.62 μgml−1). However, this difference was notstatistically significant (p=0.198). This result demon-strates that PDMS rolling does not kill a significant num-ber of cells and that the pillars are effective in separatingeach concentric layer, thus guaranteeing cell viability.
Self-assembled tubular structures have beenproved to represent a valid approach to recapitulatemilli- and micro-engineered models of blood vessels,
Figure 7. (a) FEM-based simulation results classified for cell type (primary cardiomyocytes and differentiated skeletalmuscle cells),PDMSmixing ratio (5:1, 10:1, 15:1 and 20:1) and bilayer thickness (10, 15 and 25 μm). Images depict thefinal contraction of eachrolled PDMS structure analyzed. (b)Graphs reporting the bio-actuator contraction (shortening percentage, respect to the initiallength) for the two cell types (primary cardiomyocytes and differentiated skeletalmuscle cells), the different PDMSmixing ratios andthe different bilayer thickness values.
11
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

in previous studies [42]. Our results demonstrate thatthis model can also effectively mimic the internalstructure of a muscle fiber, with the presence of
parallel myotubes along the longitudinal direction,kept viable thanks to the intrinsic shape of the self-assembled structure.
Figure 8.Viability and orientation of CMs (a) andC2C12 cells (b) cultured on amicrogrooved PDMS surface. Green-colored cells areviable, red-colored cells are dead or necrotic. Thewhite arrows indicate the groove axis in both cases. (c) Bright field image andfluorescence (confocal) images of C2C12 cells at day 7 of differentiation, on a grooved PDMS substrate. (d) Brightfield andfluorescence (confocal) images of C2C12+ nHDF cells at day 7 of differentiation on a grooved substrate. The red boxes evidencemagnified areas of thefluorescence images. Scale bars are 50 μm. (e) Comparison between the fusion index calculated for C2C12 cellsand for theC2C12+ nHDF co-culture. ** = p<0.01.
12
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

3.6. Assessment of bio-actuator contractionThe results of FEM simulations, reported insection 3.4, were validated by analyzing the in vitroactual behavior of a specific case, referred to a rolledPDMS structure (15:1 mixing ratio, with a bilayerthickness of 25 μm). Figure 10(a) shows FEM imagesof the mentioned sample, characterized by a short-ening of 1.32% of its length under the action ofprimary CMs. Its contraction movement is showedalso in video S2.
Videos of the spontaneous contraction move-ments of the tested rolled PDMS structure were cap-tured in bright field and analyzed as described insection 2.7. The optical tracking permitted to recordthe movement in a non-invasive way, without inter-fering on muscle cells activity. Figure 10(b) shows aportion of the CM-seeded rolled structure. A depic-tion of such portion is shown by the CAD image on theright; the white arrows indicate the movement direc-tion of pixel areas, explained by the optical flow the-ory. The PDMS structure preferentially shrunk alongits longitudinal axis due to the contraction forces ofthe alignedCMs (inset infigure 10(b)).
Figure 10(c) shows the structure contraction overtime. Each peak represents the contraction and relaxa-tion phases of the device. Themeasured average devicecontraction was 2.19 ± 0.54%. This corresponded to alongitudinal shortening of 219 ± 54 μm, being theactuator length equal to 1 cm. From the analysis, wealso obtained additional parameters regarding the bio-actuator contraction performance, such as the dura-tion and the beating rate, which were 0.61 ± 0.08 s and1.14 ± 0.21 Hz, respectively.
Figure 10(d) shows the comparison between thecontraction value predicted by FEM simulation(1.32%) and the average value measured in vitro. Theslight difference observed can be due to a series of
factors. Besides unavoidable distortions from the idealcase due to variability in material properties and cellbehavior, the stress value used for CM-based simula-tions (4 mNmm−2, [19]) can be affected by significantvariations when different CM isolation strategies areemployed and when different surface chemistries andmatrix stiffness are considered. Moreover, the totalnumber of cells adhered on the substrate may beunderestimated, in the FEMenvironment. Overall, thevalidation of FEM simulation results can be con-sidered successful. Thus, the predicted contractionvalues for different thicknesses, elastic moduli and celltypes shown infigure 7 can be considered realistic.
CMs are interesting bio-elements that have beenexplored for the fabrication of self-actuated bio-hybrid systems, since these cells are synchronous anddo not need external power to be triggered [66]. How-ever, as mentioned in the Introduction, skeletal mus-cle cells constitute an attractive alternative to CMsin situations that require high spatial and temporalcontrollability over contraction. Localized stimulationof engineered skeletal muscle constructs has beendemonstrated [32], although the forces generated byin vitro constructs, at present, still remain considerablysmaller in comparison with those that are generatedin vivo [12].
Our data demonstrated the feasibility of using car-diac muscle cells to actuate deformable rolled 3DPDMS structures, as bio-hybrid devices, but also vali-dated advanced FEM simulations, which predictedbio-actuator contraction in the case of rolled struc-tures coupled with mature contractile skeletal myo-tubes. To achieve such ambitious goal, properstimulation tools and additional dedicated technolo-gies are needed [65, 67], which go beyond the scope ofthis paper.
Figure 9. (a) Fluorescence image of a PDMS structure, after rolling (top view). Live cells are green-colored. Arrows evidence the cell-provided concentric layers of the structure. Scale bar is 100 μm. (b)Comparison between theDNA concentrationsmeasured forrolled and unrolled PDMS structures. Both structures were initially in a rolled configuration andwere seededwith cells. After 24 h, therolled PDMS structurewas self-assembled by cutting one end of themembrane, while the other sample typewas kept unrolled. Bothsample types were cultured for further 24 h, beforeDNAquantification.
13
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

4. Conclusion
We demonstrated the feasibility of an innovativeapproach for the development of 3D self-assembledengineered substrates, to be used as enabling matricesin the field of bio-hybrid actuation. Our results high-lighted the possibility to develop rolled 3D PDMSstructures, characterized by different elastic moduli,by exploiting a SIRM technique. These structures wereprovided with defined topographical cues, able toorganize cells and influence their action. Differentsurface topographies permitted to obtain the align-ment of muscle cells on the top layer (thus orienting
their contraction along the longitudinal axis), and atthe same time to maintain a gap among concentriclayers, which guarantees cell viability. A specific sur-face chemical treatment allowed to obtain long-termstable coatings over two weeks, overcoming theproblem of PDMS hydrophobic recovery. Our resultsdemonstrated that these structures favor the adhesionand alignment of primary CMs and the adhesion,proliferation and differentiation of skeletal musclecells, promoting the formation ofmyotubes, alsowhensupported by a fibroblast feeder layer. Advanced FEMsimulations, performed in MARC environment,allowed to predict bio-actuator contraction for a range
Figure 10. (a) FEM simulations inMARC environment: lateral view of the analyzed rolled structure beforemuscle cells contraction(left); bio-actuator contraction in the case of primary cardiomyocytes (center); stress analysis of the rolled PDMS structure, thathighlights the localized action ofmuscle cells (right). (b) Representative video frame related to themotion analysis of the rolled PDMSstructure (left) and corresponding CAD representation (right). Themagnified picture showsCMs adhered to the internal walls of therolled structure. (c) Contraction behavior of the bio-actuator (actuator length is 10 mm) during 10 s. (d) Comparison between thepredicted (FEMsimulation) and themeasured (in vitro tests) contraction.
14
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

of thicknesses, elastic moduli and two cell types. Byconsidering a specific case (PDMS structure with amixing ratio of 15:1 and a bilayer thickness of 25 μm),based on cardiomyocytes, simulations revealed anoverall system contraction of 1.32%. A bio-actuatorwith these characteristics was also tested in vitro, byseeding primary cardiomyocytes on its surface. Thesystem showed an overall contraction of 2.19 ± 0.54%,comparable with the values obtained with the FEMsimulations. Since simulations were validated with thein vitro experimental results, predictions of bio-actuator contraction at lower thicknesses (e.g. 10 μm)and elastic moduli (e.g. 0.573MPa) can be consideredrealistic, thus highlighting the potential of thesesystems for reaching higher contraction values (up to25%). Futureworkwill be focused on the developmentof the additional technologies needed to achievemature and functional skeletalmyotubes and to triggertheir contraction, when required.
Acknowledgments
The authors would like to deeply thank Dr GianniCiofani andDrGiadaGrazianaGenchi, for their advicesconcerning the PDMS surface functionalization proce-dure, Dr Tercio Terencio for the acquisition of fluores-cence images with the confocal microscope, MrFrancescoCorucci for his help in the development of themotion vector analysis program implemented inMatlabandDrMaurizio Follador for the help in setting up FEMsimulations on MARC®/Mentat®. Furthermore, theydeeply acknowledgeMrCarloFilippeschi forhis supportduring all the clean-room procedures, Mr NicodemoFunaro and Mr Andrea Melani for the fabrication ofcustom elements in the BioRobotics Instituteworkshop.This work was supported in part by the GeT Smallproject (TarGeted Therapy at Small Scale), funded bythe Scuola Superiore di Studi Universitari e di Perfezio-namento Sant’Anna (Pisa, Italy).
References
[1] ZupanM,AshbyMF and FleckNA2002Actuatorclassification and selection—the development of a databaseAdv. Eng.Mater. 4 933–9
[2] Pons J P 2005Emerging Actuator Technologies: aMicromechatronic Approach (Chichester:Wiley)
[3] Ricotti L andMenciassi A 2012 Bio-hybridmuscle cell-basedactuatorsBiomed.Microdev. 14 987–98
[4] Price AD, Jnifene A andNaguibHE 2007Design and controlof a shapememory alloy based dexterous robot hand SmartMater. Struct. 16 1401–14
[5] Shankar R,Ghosh TK and Spontak R J 2007Dielectricelastomers as next-generation polymeric actuators SoftMatter3 1116–29
[6] VohrerU, Kolaric I, HaqueMH,Roth S andDetlaff-WeglikowskaU 2004Carbon nanotube sheets for theuse as artificialmusclesCarbon 42 1159–64
[7] Madden JD, VandesteegNA,Anquetil P A,Madden PG,Takshi A, Pytel R Z, Lafontaine S R,Wieringa PA andHunter IW2004Artificialmuscle technology: physicalproperties and naval prospects J. Ocean. Eng. 29 706–28
[8] Mirfakhrai T,Madden JDWandBaughmanRH2007Polymer artificialmuscleMater. Today 10 30–8
[9] Ricotti L andMenciassi A 2015Nanotechnology inbiorobotics: opportunities and challenges J. Nanop. Res. 171–10
[10] Hunter IW and Lafontaine SR 1992A comparison ofmusclewith artificial actuators Proc. 5th Technical Digest. IEEE (Solid-State Sensor andActuatorWorkshop) pp 178–85
[11] Duffy RMand Feinberg AW2014 Engineered skeletalmuscletissue for soft robotics: fabrication strategies, currentapplications, and future challengesWiley Interdiscip. Rev.Nanomed. Nanobiotechnology 6 178–95
[12] KammRDandBashir R 2014Creating living cellularmachinesAnn. Biomed. Eng. 42 445–59
[13] Carlsen RWand SittiM 2014 Bio‐hybrid cell‐based actuatorsformicrosystems Small 10 3831–51
[14] Ricotti L,Menciassi A andMorishimaKGuest editorialintroduction to the special issue on bio-hybrid systems andlivingmachines 2012Biomed.Microdev. 14 965–7
[15] Majidi C 2014 Soft robotics: a perspective—current trends andprospects for the future Soft Robot. 1 5–11
[16] Laschi C andCianchettiM2014 Soft robotics: newperspectives for robot bodyware and control Front. Bioeng.Biotechnol. 2 3
[17] HerrH andDennis R 2004A swimming robot actuated bylivingmuscle tissue J. NeuroEng. Rehabil. 1
[18] Tanaka Y,MorishimaK, Shimizu T, Kikuchi A, YamatoM,Okano T andKitamori T 2006An actuated pumpon-chippowered by cultured cardiomyocytes LabChip 6 362–8
[19] Feinberg AW, Feigel A, Shevkoplyas S S, Sheehy S,Whitesides GMandKit Parker K 2007Muscular thin films forbuilding actuators and powering devices Science 317 1366–70
[20] AkiyamaY, Iwabuchi K, FurukawaY andMorishimaK 2009Long-term and room temperature operable bioactuatorpowered by insect dorsal vessel tissue LabChip 9 140–4
[21] AkiyamaY,HoshinoT, IwabuchiKandMorishimaK2012Roomtemperatureoperable autonomouslymovingbio-microrobotpoweredby insect dorsal vessel tissuePloSOne7 e38274
[22] BaryshyanAL,WoodsW, Trimmer BA andKaplanDL 2012Isolation andmaintenance-free culture of contractilemyotubes fromManduca sexta embryos PloSOne 2 e31598
[23] BaryshyanAL,Domigan L J,Hunt B, Trimmer BA andKaplanDL 2014 Self-assembled insectmuscle bioactuatorswith long term function under a range of environmentalconditionsRSCAdv. 4 39962–8
[24] FujitaH, ShimizuK,HatsudaR, Sugiyama S andNagamori E2011Designingof a Si-MEMSdevicewith an integrated skeletalmuscle cell-basedbio-actuatorBiomed.Microdev.13123–9
[25] SakarMS,NealD, BoudouT, BorochinMA, Li Y,Weiss R,KammRD,ChenC S andAsadaHH2012 Formation andoptogenetic control of engineered 3D skeletalmusclebioactuators LabChip 12 4976–85
[26] Ahadian S, Ramón-Azcón J,Ostrovidov S, Camci-Unal G,Kaji H, InoK, ShikuH,Khademhosseini A andMatsue T 2012A contactless electrical stimulator: application to fabricatefunctional skeletalmuscle tissueBiomed.Microdev. 15 109–15
[27] Shin S R et al 2013Carbon-nanotube-embedded hydrogelsheets for engineering cardiac constructs and bioactuatorsACSNano 7 2369–80
[28] Derda R, Tang SKY, Laromaine A,Mosadegh B,Hong E,MwangiM,MammotoA, IngberDE andWhitesidesGM2011Multizone paper platform for 3D cell cutlures PloSOne 6e18940
[29] KoleweME, ParkH,GrayC, YeX, Langer R and Freed L E2013 3D structural patterns in scalable, elastomeric scaffoldsguide engineered tissue architectureAdv.Mater. 25 4459–65
[30] Ricotti L, Taccola S, PensabeneV,Mattioli V, Fujie T,Takeoka S,Menciassi A andDario P 2010Adhesion andproliferation of skeletalmuscle cells on single layer poly(lacticacid) ultra-thinfilmsBiomed.Microdev. 12 809–19
[31] Ricotti L et al 2013 Boron nitride nanotube-mediatedstimulation of cell co-culture onmicro-engineered hydrogelsPloSOne 8 e71707
15
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al

[32] Nagamine K,KawashimaT, Sekine S, IdoY, KanzakiM andNishizawaM2011 Spatiotemporally controlled contraction ofmicropatterned skeletalmuscle cells on a hydrogel sheet LabChip 11 513–7
[33] HosseiniV,Ahadian S,OstrovidovS,Camci-UnalG,Chen S,KajiH,RamalingamMandKhademhosseiniA2012Engineeredcontractile skeletalmuscle tissueon amicrogroovedmethacrylated gelatin substrateTissueEng.A 18 2453–65
[34] Kaji H, Ishibashi T, NagamineK,KanzakiM andNishizawaM2010 Electrically induced contraction of C2C12myotubescultured on a porousmembrane-based substrate withmuscletissue-like stiffnessBiomaterials 31 6981–6
[35] Nawroth J C, LeeH, Feinberg AW,Ripplinger CM,McCainML,Grosberg A,Dabiri J O andKit Parker K 2012Atissue-engineered jellyfishwith biomimetic propulsionNat.Biotechnol. 8 792–7
[36] Williams B J, Anand SV, Rajagopalan J and SaifMTA2014Aself-propelled biohybrid swimmer at lowReynolds numberNat. Commun. 5 3081
[37] ChanV, Kit ParkK, CollensMB,KongH, SaifMTA andBashir R 2012Development ofminiaturizedwalkingbiologicalmachines Sci. Rep. 2 857
[38] Cvetkovic C, RamanR, ChanV ,,Williams B J, TolishM,Bajaj P, SakarMS, AsadaHH, SaifMTAandBashir R 2014Three-dimensionally printed biologicalmachines powered byskeletalmuscleProc. Natl Acad. Sci. 28 10125–30
[39] Levenberg S et al 2005 Engineered vascularized skeletalmuscletissueNat. Biotechnol. 23 879–84
[40] Rouwkema J,RivronNCandvanBlitterswijkCA2008Vascularization in tissue engineeringTrendsBiotechnol.26434–41
[41] JuhasM, Engelmayr GC, Fontanella AN, PalmerGMandBursacN 2014 Biomimetic engineeredmuscle with capacityfor vascular integration and functionalmaturation in vivo Proc.Natl Acad. Sci. 111 5508–13
[42] Bo Y, Jin Y, SunY,WangD, Sun J,WangZ, ZhangWandJiang X 2012A strategy for depositing different types of cells inthree dimensions tomimic tubular structures in tissuesAdv.Mater. 24 890–6
[43] PensabeneV, Taccola S, Ricotti L, Ciofani G,Menciassi A,Perut F, SalernoM,Dario P andBaldiniN 2011 Flexiblepolymeric ultrathin film formesenchymal stem celldifferentiationActa Biomater. 7 2883–91
[44] Fujie T, Ricotti L, Desii A,Menciassi A, Dario P andMattoli V2011 Evaluation of substrata effect on cell adhesion propertiesusing freestanding poly (l-lactic acid) nanosheets Langmuir 2713173–82
[45] Ventrelli L, Ricotti L,Menciassi A,Mazzolai B andMattoli V2013Nanoscaffolds for guided cardiac repair: the newtherapeutic challenge J. Nanomater. 36 108485
[46] Charest JL,EliasonMT,GarcìaA JandKingWP2006Combinedmicroscalemechanical topographyandchemicalpatternsonpolymercell culture substratesBiomaterials272487–94
[47] CallisterWDandRethwischDG2007Materials Science andEngineering: an Introduction (NewYork:Wiley)
[48] VlachopoulouME, Petrou P S, Kakabakos S E, Tserepi A,Beltsios K andGogolides E 2009 Effect of surfacenanostructuring of PDMSonwetting properties,hydrophobic recovery and protein adsorptionMicroelectron.Eng. 86 1321–4
[49] BodasD andKhan-MalekC 2006 Formation ofmore stablehydrophilic surfaces of PDMSby plasma and chemicaltreatmentsMicroelectron. Eng. 83 1277–9
[50] ButlerMF,NgY F and Pudney PDA2003Mechanism andkinetics of the crosslinking reaction between biopolymerscontaining primary amine groups and genipin J. Polym. Sci.A41 3941–53
[51] Genchi GG, CiofaniG, Liakos I, Ricotti L, Ceseracciu L,AthanassiouA,Mazzolai B,Menciassi A andMattoli V 2013Bio/non-bio interfaces: a straightforwardmethod forobtaining long termPDMS/muscle cell biohybrid constructsColloids Surf.B 105 144–51
[52] Rizzi R et al 2012 Post-natal cardiomyocytes can generate iPScells with an enhanced capacity toward cardiomyogenic re-differentationCell DeathDiffer. 19 1162–74
[53] Bearzi C,Gargioli C, Baci D, FortunatoO,Shapira-Schweitzer K, KossoverO, LatronicoMVG,Seliktar D, Condorelli G andRizzi R 2014 PlGF–MMP9-engineered cardiomyocyte-derived iPS cells supported on aPEG–fibrinogen hydrogel scaffold possess an enhancedcapacity to repair damagedmyocardiumCell DeathDis. 5e1053
[54] Cooper S,Maxwell A, Kizana E, GhoddusiM, Hardeman E,Alexander I, Allen D andNorth K 2004 C2C12 co-culture ona fibroblast substratum enables sustained survival ofcontractile, highly differentiatedmyotubes with peripheralnuclei and adult fast myosin expressionCellMotil. Cytoskel.58 200–11
[55] RenK, Crouzier T, RoyC andPicart C 2008 Polyelectrolytemultilayer films of controlled stiffnessmodulatemyoblast cellsdifferentiationAdv. Funct.Mater. 18 1378–89
[56] LimaO, Tan L, Goel A,NegahbanMand Li Z 2007Creatingmicro- and nanostructures on tubular and spherical surfacesJ. Vac. Sci. Technol.B 25 2412–8
[57] ShimizuK, SasakiH,HidaH, FujitaH,Obinata K,ShikidaMandNagamori E 2010Assembly of skeletalmusclecells on a Si-MEMSdevice and their generative forcemeasurementBiomed.Microdev. 12 247–52
[58] Horn BK and Schunck BG1981Determining opticalflow,Technical Symp. East (Bellingham,WA: International SocietyforOptics and Photonics) pp 319–31
[59] Hayakawa T, Kunihiro T,Dowaki S, UnoH,Matsui E,UchidaM,Kobayashi S, YasudaA, Shimizu T andOkanoT2011Noninvasive evaluation of contractile behavior ofcardiomyocytemonolayers based onmotion vector analysisTissue Eng.C 1 21–32
[60] Altomare L, GadegaardN,Visai L, TanziM and Farè S 2010Biodegradablemicrogrooved polymeric surfaces obtained byphotolithography for skeletalmuscle cell orientation andmyotube developmentActa Biomater. 6 1948–57
[61] LamMT, Sim S, ZhuX andTakayama S 2006The effect ofcontinuous wavymicropatterns on silicone substrates on thealignment of skeletalmusclemyoblasts andmyotubesBiomaterials 27 4340–7
[62] Engler A J, GriffinMA, Sen S, BonnemannCG,SweeneyHL andDischerDE 2004Myotubes differentiateoptimally on substrates with tissue-like stiffness J. Cell Biol.166 877–87
[63] HerschN,Wolters B,DreissenG, Springer R, KirchgeßnerN,Merkel R andHoffmannB 2013The constant beat:cardiomyocytes adapt their forces by equal contraction uponenvironmental stiffeningOpen Biol. 3 351–61
[64] Hersen P and Ladoux B 2011 Biophysics: push it, pull itNature470 340–1
[65] LangelaanML, BoonenK J, Rosaria‐ChakKY,van der Schaft DW, PostM J andBaaijens F 2011Advancedmaturation by electrical stimulation: differences in responsebetweenC2C12 and primarymuscle progenitor cells J. TissueEng. Reg.Med. 5 529–39
[66] ChanV, AsadaHHandBashir R 2014Utilization and controlof bioactuators acrossmultiple length scales LabChip 4 653–70
[67] Rangarajan S,Madden L andBursacN2014Use offlow,electrical, andmechanical stimulation to promote engineeringof striatedmusclesAnn. Biomed. Eng. 42 1391–405
16
Bioinspir. Biomim. 10 (2015) 056001 LVannozzi et al