Embed Size (px)
Citation preview

February 20, 2020
Section II Presentations
February 20, 2020
Michael Lagrange
Assistant Project Manager,
PDR Outline and Points of Failure

PDR Format and Outline: February 27th
What is Expected• Top level explanations
• Mature analysis, (Expect questions on
decision making)
What to Expect• Compile info from different sub-groups,
address sections of vehicle analysis.
Timing• ~25 – 40 min presentations
• Quick Transitions
• Ensure time for questions
Who is Presenting• PDR outline doc shows vehicle analysis
sections, one person each section
Cycler – 3:50
Tether Slings – 4:35
Mass Driver – 5:20
ED Tether – 6:10
Taxi – 6:50
Communication Satellites – 7:35

Points of Failure – Risk Analysis 1.5
Updated Key Events List Based on Changes to Mission Specifications• No longer planning to use vertical landing on mars, removed events
• Additional risk considerations to rendezvous with moving object in atmosphere
• ED tether no longer directly servicing cycler
• Etc.
Points of Failure Risk Analysis • Key Events have points of failure of highest likelihood (Mechanical or Process)
• Other points of failure are rated comparatively, severity and likelihood
• Communication with sub-groups
• Categorize using risk matrix
• Points of high severity or likelihood will require redundancy and fail-safes

Juliann Mahon
February 20, 2020Discipline: CAD Team
Vehicle and System Group: Tether Slings

ED Tether Sketches
Requirements:
Top, side, and isometric drawings of the ED
Tether in Earth Orbit
Need to Determine:
Dimensional and power requirements for the
tether
ED tether sketches sketched by Juliann Mahon

Next Steps
- Work with Power and Thermal and Structures to get accurate dimensions for the sizing of the tether.
- Create a more developed design and possible animations of the tether sling
- Work with CAD teammates on further designs of each tether
TAXI
HUB

February 20th, 2020
Dylan Pranger
Discipline: CAD
Group and System: Mass Driver

Mass Driver Design
Problem:
• Slowing down the cradle without interfering with the taxi
Old Design:
• Coil Gun
Issues:
• Could not decelerate cradle separately from taxi vehicle
• Taxi could hit coils in launch

Mass Driver Design
Design Moving Forward: Mag Lev
• Proven to work with larger loads(passenger trains)
• Solves the cradle/Taxi problem

February 20, 2020
William Sanders
Discipline: CAD
Vehicle: Taxi

Taxi Design Change
• Due to the change in our mission requirements the Taxi
design had to be significantly altered.
• The shape was changed to better manage heating due
to Martian atmospheric drag.
All Drawings and Figures by
William Sanders

Taxi Breakdown
• Still four Taxis with 24 seats each
• Passenger cabin in nose of vehicle
with two bathrooms
• Life Support, food storage, and
essential avionics located below
• Docking hatch above
• Communications Antennae in nose
cone
All Drawings and Figures by
William Sanders
February 20, 2020
Aaron Engstrom
Discipline: CAD
Vehicle and Systems Group: Cycler 14
The Problem: Determine the Configuration of the Cycler Vehicle
Requirements
• Solar panels positioned to minimize solar radiation effect on Moment but also simplify
our main prop configuration
• Main prop coaxial w/ super structure, through CM
• Taxi vehicles can comfortably maneuver between the rotating elevators to the
superstructure
• HF settings modeled in the identical hab modules
Assumptions
• We are considering the average material density to be that of ISS aluminum
• Autopiloting in the future is nearly perfect when in a vacuum
Need to Determine
• Solar panel & main prop locations
• Habitation module units
15

Intermediate Design
Next Steps
• Comms modeling
• Detailed superstructure interior modeling
• Mass to be estimated once additional
materials and thicknesses are specified
• Maintain centralized dimensions document
and complete parametric modeling
16
Considerations
● 8 panels on one side is fine
○ Length perpendicular to the SS’s
longitudinal axis
● Angular velocity direction is arbitrary
● Major prop opposite the panels
● Elevator spacing has been extended
to assist with docking
vω
February 20, 2020
Nick Oetting
Communications
Communication Satellites
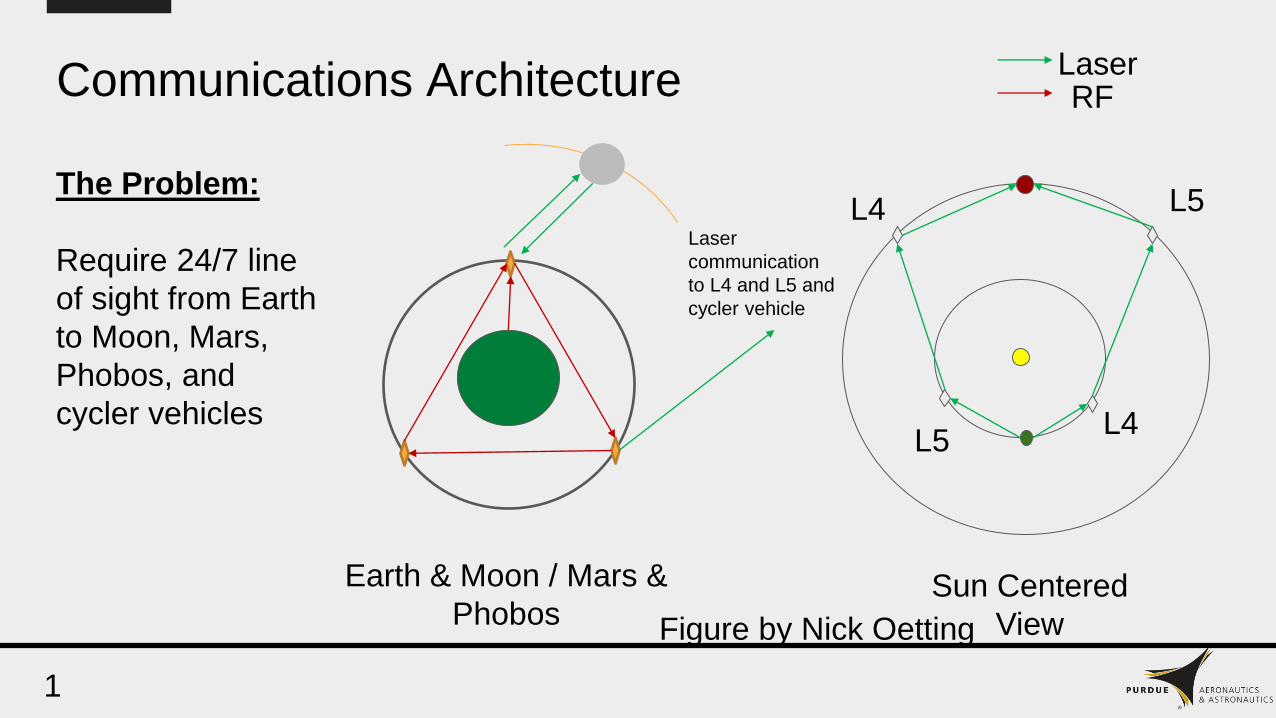
Communications Architecture
Laser
communication
to L4 and L5 and
cycler vehicle
Earth & Moon / Mars &
PhobosSun Centered
View
L5L4
L4 L5The Problem:
Require 24/7 line
of sight from Earth
to Moon, Mars,
Phobos, and
cycler vehicles
LaserRF
Figure by Nick Oetting
1

Communication System LifecycleThe Problem:
Analyze the
lifecycle of
communication
satellites at the
Lagrange points
and develop a
replacement
timeline
A 1550 nm laser has an expected lifetime of 40,000
hours ≈ 6 years [1]
Table by Nick Oetting
2

January 30, 2020
Eric Smith
Communications
Communication Satellites 20
The Problem: Determine the size of aperture and required power for satellite communication systems.
Assumptions:
• Dominating noise sources are the sun and system temperature
• Not all Earth base stations will have severe rainstorms at the
same time
• Mars Base stations will have 10 m antennas
• Laser and Radio Frequency (RF) transceiver is 20% efficient
Requirements:
• 4 dB Link Margin
• 1 Gbit/s data rate 21

Solution:
22
Satellite Location Link Destination Link Type Antenna AperturePower
Required
GEO
Earth Lagrange Optical 3 m 100 W
GEO RF 2 m 500 W
Earth RF 0.5 m 250 W
Earth LagrangeMars Lagrange Optical 4 m 125 W
GEO Optical 3 m 200 W
Mars LagrangeEarth Lagrange Optical 4 m 300 W
AEO Optical 2.5 m 100 W
AEO
Mars Lagrange Optical 2.5 m 100 W
AEO RF 2 m 100 W
Mars RF 0.5 m 32.5 W
February 20th, 2020
Jacob Leet
Discipline: Controls
System: Cycler/Taxi
Problem:
Cycler Trajectory Correction:
Problem:- Investigate Trajectory changes due to
external force on the spacecraft
Requirements:- Initial positions & Velocities of Sun, Earth,
Moon, Mars, Phobos (EME2000 Frame)
- Initial position and velocity of Cycler
Assumptions:- No meteoroids hit during orbit
- No non-propulsive mass expulsion
- No effect from cosmic rays
Cycler/Taxi Interception:Problem:- Find closet location between Cycler and
Phobos for interception to minimize ΔV
- Find time range for taxi tether launch
Requirements:- Same Requirements as trajectory correction
Assumptions:- Same Requirements as trajectory correction

Model & Analysis: Orbit Simulation
Solution Method:- Initial positions & velocities of celestial bodies
retrieved from HORIZONS Web-Interface
- Initial Cycler position and velocity data retrieved
from Rob Potter’s files
Results: (Cycler #1)Trajectory offset?
There is a slight change in simulated trajectory as
compared to desired trajectory. Controller to be
introduced.
Min Distance Between Cycler and Moon:
741,600 km on December 7th, 2020
[1] Chamberlin, A. B. (n.d.). HORIZONS Web-Interface. Retrieved February 19, 2020, from
https://ssd.jpl.nasa.gov/horizons.cgi#top
[2] Longuski, J. M., Todd, R. E., & Konig, W. W. (1992). Survey of Nongravitational Forces and Space Environmental
Torques: Applied to the Galileo. Journal of Guidance, Control, and Dynamics, 15(3).
Ferbruary 20th, 2020
Yash Mishra
Controls
Feedback Control Loop to Soft-Dock the Taxi
Vehicle to the Cycler

Problem: How to achieve soft docking with the cycler
Requirements:
• Match orientation of the taxi docking port with that of the cycler
• Get taxi to match the cyclers angular velocity of 0.157 m/s
• Minimize acceleration while docking
To solve:
• Design a feedback control system for the taxi that updates its position and
orientation coordinates periodically with respect to the cycler
• Design a robotic arm for berthing the taxi into the docking port after desired
orientation has been achieved.

Solution
• Find the cycler orientation and
position in the taxi’s reference
frame
• Use taxi’s gyroscopes to get body
angles and rates and orient them
with respect to the cycler
• Introduction of a robotic arm to
match angular velocities perfectly
before soft-docking.

February 20, 2020
Kevin Huang
Mass Driver—Maximum Tolerable Acceleration
The Problem
• The mass driver needs to know the maximum acceleration they can
use to be able to start on the design
• Humans have a finite tolerance for both centrifugal acceleration and
longitudinal acceleration
• This tolerance is what defines the upper limits of what the designers of
the mass driver can work with
Solution
• Backward acceleration is like forward acceleration, but respiratory
problems are less severe
Forward Acceleration Backwards Acceleration
accel. accel.
7G’s absolute max acceleration (at any given time), but 2G’s max
sustained acceleration recommended [1]: more info in backup slides
This Photo by Unknown Author is
licensed under CC BY
This Photo by Unknown Author is
licensed under CC BY

February 20, 2020
Walter Manuel
Discipline: Human Factors
Vehicles/Systems: Cycler
Topic: Radiation Shielding
32

Problem: Protecting Crew from Radiation
• Space radiation is a serious threat to extended human space exploration
[1][2].
• Current NASA Exposure Limits [3]:
• Limit for radiation exposure in low-Earth orbit = 0.50 Sv/year
• Lowest career exposure limit is 1 Sv (female, 25 years old)
• Highest career exposure limit is 4 Sv (male, 55 years old)
• Maximum possible GCR exposure for 1 year [5]: 0.6 Sv
• Duration of mission: 8 months one-way, 2 years round trip
33

Solution: Aluminum Radiation Shielding
● Each trip is within NASA’s yearly exposure
limits.
● Crew members would be able to make at least
1.5 round-trips to Mars, and at most 7 round-
trips to Mars.
34
Materials Summary
● Several Materials, including polyethylene are
more effective than Aluminum.
● Heat Melt Compactor tiles are 90% as effective
as polyethylene [4].
● However, only Aluminum provides enough
structural integrity to form the outer shell.
● Multi-layered concepts have not demonstrated
significant effectiveness [9]
Material Thickness
(m)
Mass
(Mg)
Volume
(m3)
Aluminu
m
.1481 1722.6 638
Conclusions
Time
Elapsed
Effective
Dose (Sv)
8 Months .1947
1 Year .2920
2 Years .5840

February 20, 2020
Jordan Mayer
Mission Design
Communication Satellites

The Problem: Interplanetary Relay Distances and Station Keeping
● Proposal
○ 2-4 interplanetary relays at
L4/L5 Lagrange points (Sun-
Earth or Mars-Earth)
● Challenges
○ Want to minimize distances
between points of
communication
○ How much Δ𝑉 will be needed
for station keeping (SK)?
● Assumptions/Constraints
○ Assume coplanar orbits
○ Treat each system as a single
point
○ Simulate for 15 years;
geometry repeats after this
(Byrnes, Longuski, & Aldrin)
The Solution: 4 Relays, Δ𝑉𝑆𝐾 = 0.03 km/s per year
● Why 4 relays?
○ 2 relays does not guarantee
redundancy 100% of the time
○ 4 relays significantly lowers
max communication distance
● Why 0.03 km/s per year?
○ Based on Earth-Moon L4/L5
station keeping requirements
(Folta & Vaughn)
○ Very liberal estimate (Lo,
Llanos, & Hintz)
● Important Notes
○ Losing 1 relay increases max
communication distance from
1.452 AU to 2.341 AU (but still
visible)
○ Recommend building in 100
years worth of fuel
● Next Steps
○ Verify cycler distances (in 3D)
○ Determine Luna relay orbit

February 20th, 2020
Colin Miller
Mission Design (Comm Sat)
Orbital Stability Analysis at Earth and Mars

Problem
Need to Verify Relevant Forces:
• Solar Radiation Pressure (SRP)
• Third body effects
• Tesseral harmonics
• Drag
Solution Methods:
• Magnitude of gravitation at
certain points
• GMAT Simulation

Results
Drift in Degrees Per Day at Stationary:
Mars Earth
East 3.278 0.6628
Mid 1.195 0.5652
West 3.413 0.9303
Mars
:
Eart
h:

Feburary 20, 2020
Grace Ness
Mission Design:
Safe Taxi Attachment to Pre-Spun-up Tethers
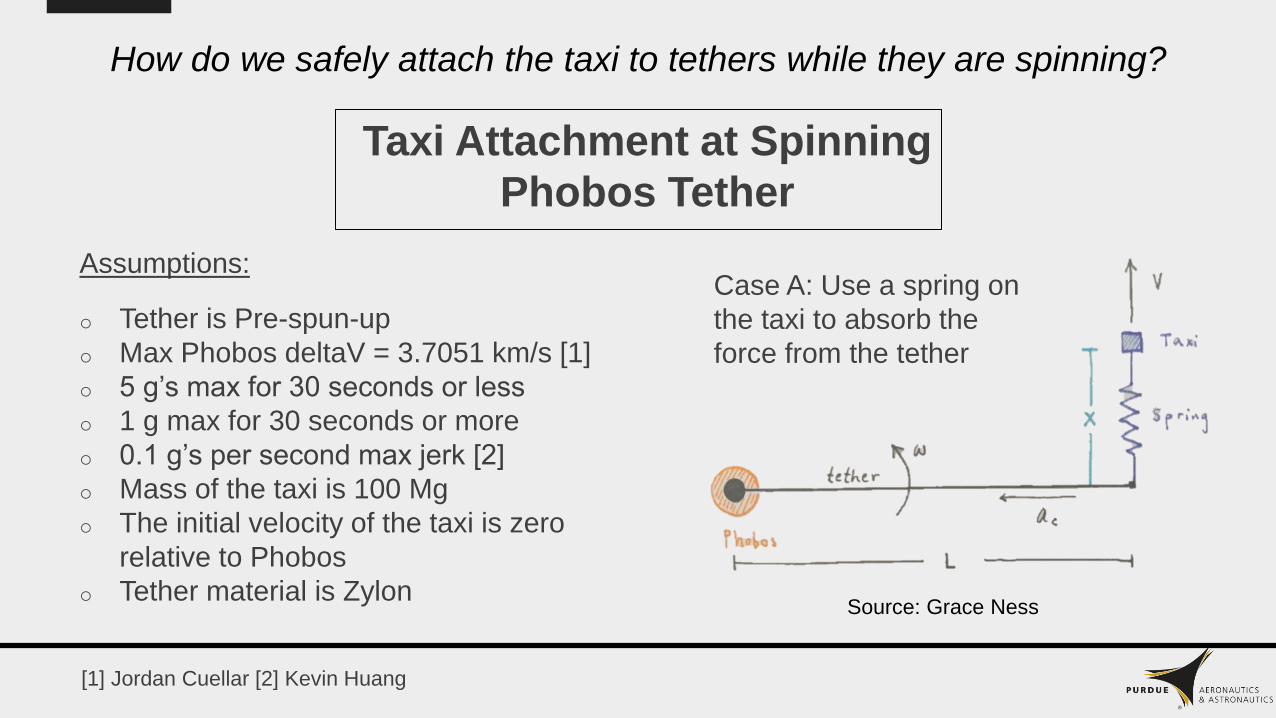
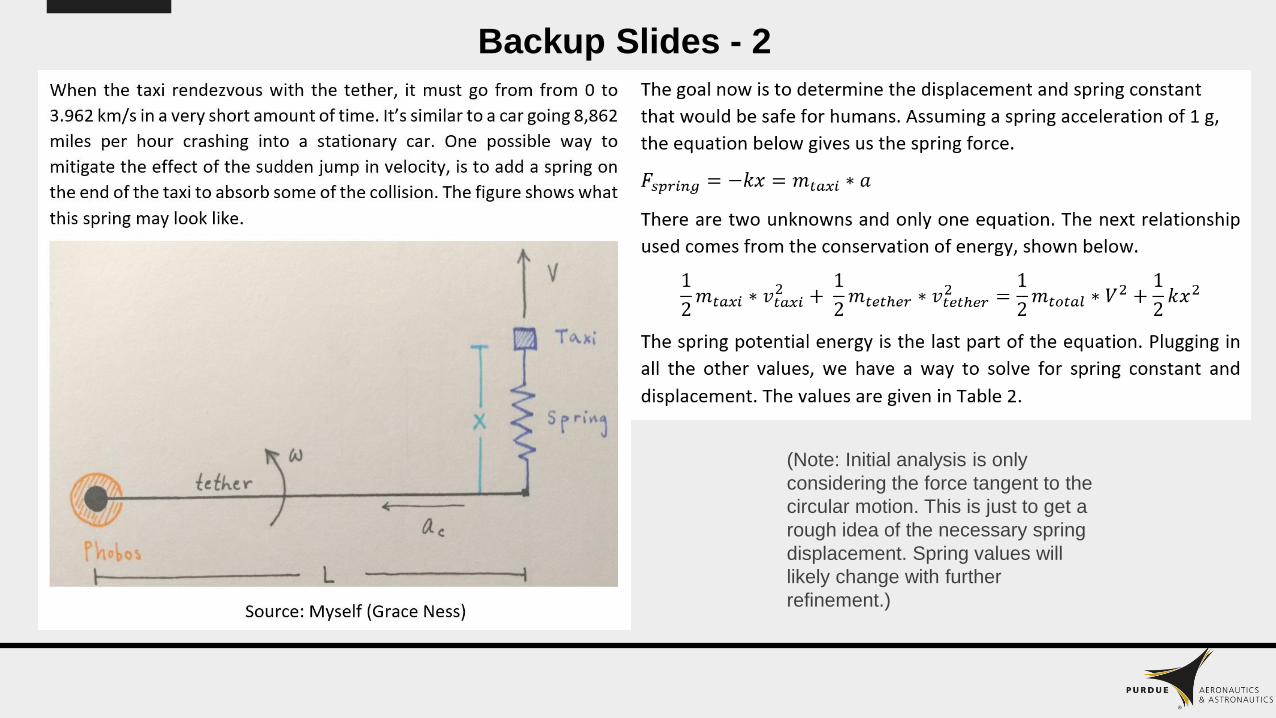
How do we safely attach the taxi to tethers while they are spinning?
Taxi Attachment at Spinning
Phobos Tether
Assumptions:
o Tether is Pre-spun-up
o Max Phobos deltaV = 3.7051 km/s [1]
o 5 g’s max for 30 seconds or less
o 1 g max for 30 seconds or more
o 0.1 g’s per second max jerk [2]
o Mass of the taxi is 100 Mg
o The initial velocity of the taxi is zero
relative to Phobos
o Tether material is Zylon
[1] Jordan Cuellar [2] Kevin Huang
Case A: Use a spring on
the taxi to absorb the
force from the tether
Source: Grace Ness
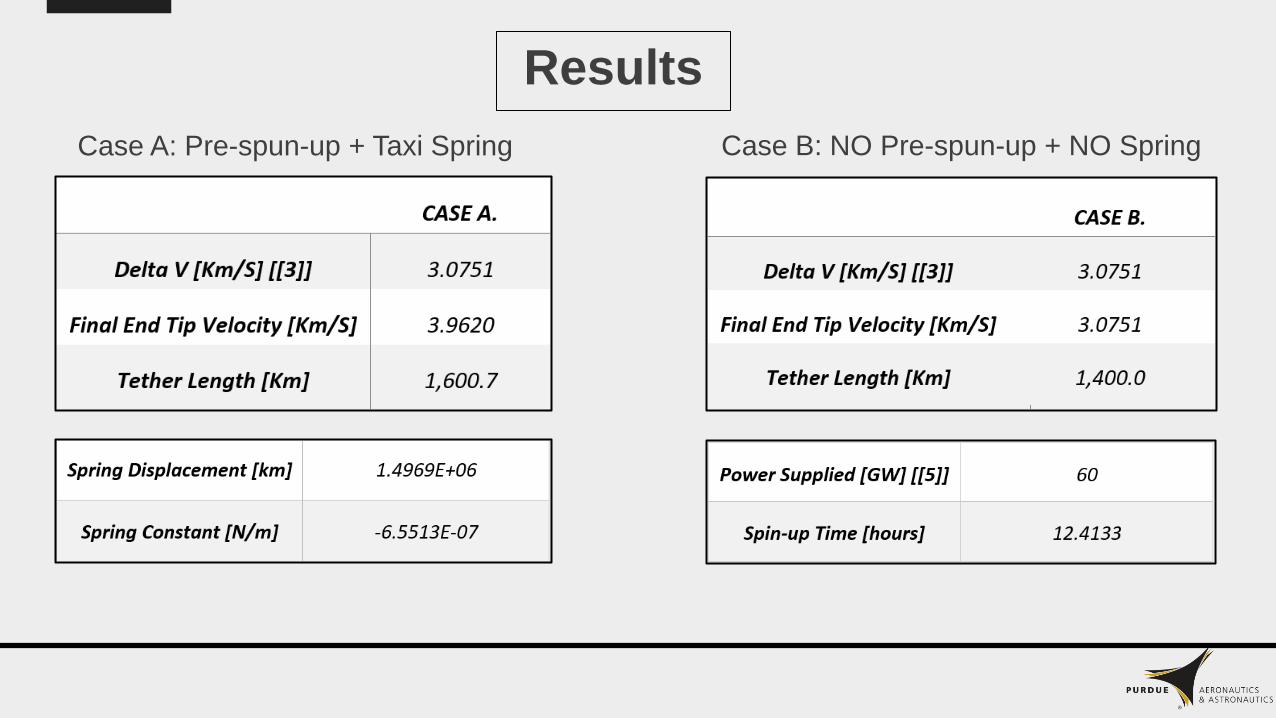
Case A: Pre-spun-up + Taxi Spring Case B: NO Pre-spun-up + NO Spring
Results
February 20, 2020
Dean Lontoc
Power and Thermal:
Taxi Vehicle Power System Configuration

Taxi Vehicle Power
[1] AAE 450: Mission Design: Jennifer Bergeson
[2] AAE 450: Structures: Nicki Liu
Presentation 1 Recap:
• Taxi needs 22kW of power.
• Chose Proton Exchange Membrane Fuel Cell (PEMFC)
Current Problem: Configure power system to last varied mission duration and withstand mission parameters [1].
Select method of reactant storage.
Fuel Cell Location in Taxi [2]
Power System Selection Matrix
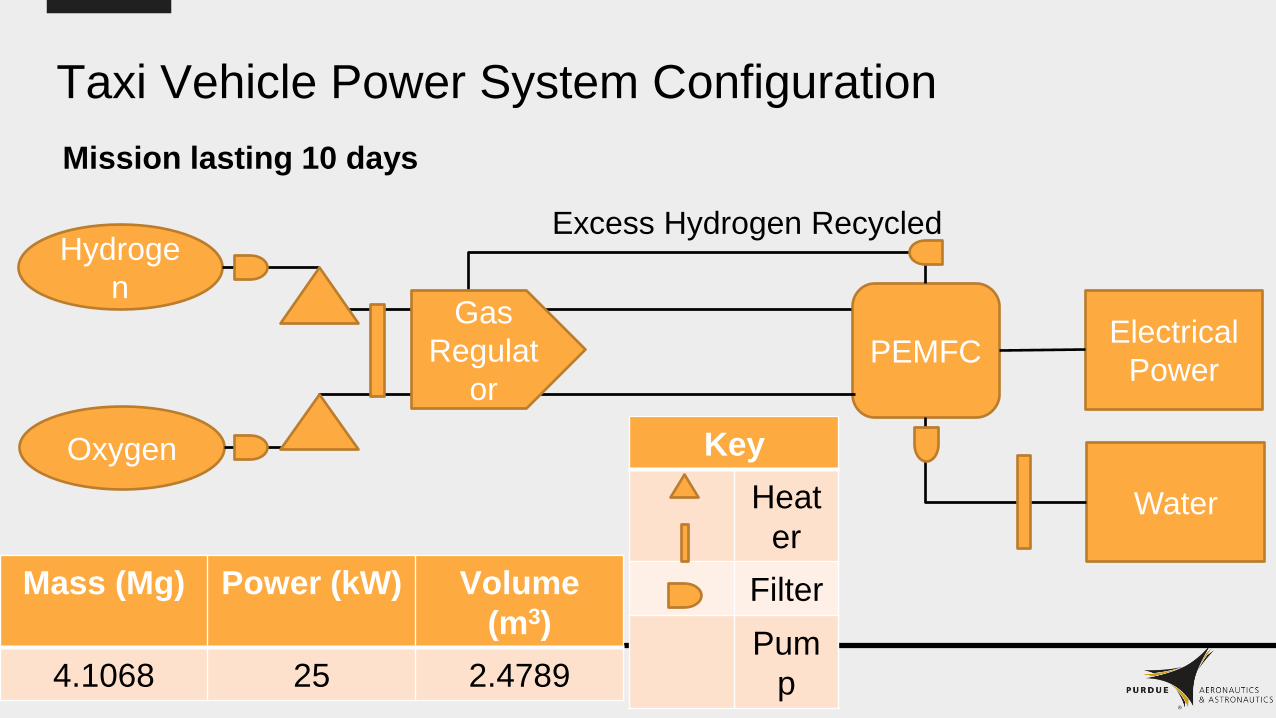
Taxi Vehicle Power System Configuration
Mass (Mg) Power (kW) Volume
(m3)
4.1068 25 2.4789
Mission lasting 10 days
Hydroge
n
Oxygen
PEMFCElectrical
Power
Water
Excess Hydrogen Recycled
Key
Heat
er
Filter
Pum
p
Gas
Regulat
or

January 30, 2020
Jacob Nunez-Kearny
Power & ThermalCycler: Power Generation & Storage

Cycler Power
Problem: Refine power generation estimates, investigate alternative power sources,
size the batteries for critical systems
Requirements:• Generate and store power for life support, communications, propulsion, etc
• Provide source of backup power for crew safety
Assumptions:• Cycler tether-spin & thermal requirements not considered
Objectives:• Refine solar panel, battery sizing for chosen TRL system
• Size alternative power source for mission-critical systems

Cycler PowerSolution:• Nominal Operation
• 1MW for propulsion, 0.85MW for life support w/ margin
• Power: 1.100 MW
• Mass: 31.51 Mg
• Surface Area: 8516 m2
• Backup life support power: Batteries vs Nuclear RTGs trade study• Batteries: 5376 MWh ➝ 1792 Mg for 10.75 Mm3
• Nuclear: 100kW ➝ 20.41 Mg for 59.48 m3
• Total mass: 54.32 Mg
Next Steps:• Perform end-of-life power calculation based on panel/mission life cycle
• Investigate power safety systems

February 20, 2020
Carly Kren
Propulsion Team
Taxi - Reaction Control Systems (RCS)
Slide: 1 of 25

The Problem: Configuration of Taxi Orbital Maneuvering System
Requirements:
• Fit in the structural allotment of 6.436m x 6.436m x 10.5m
• Achieve a minimum total ∆V = 1.529 km/sec between
each refuel• Refueling determined to be at every tether sling location
• To achieve appropriate rendezvous, orbit trajectory
transfers, and attitude adjustments of taxi
Slide: 2 of 25
*Importance of OMS
configuration on taxi*
(assume RCS thrusters
provided steering in graphic)
Destination
Well
configured
OMS
Poorly
configured
OMS
Key:
U = Ullage accounted for
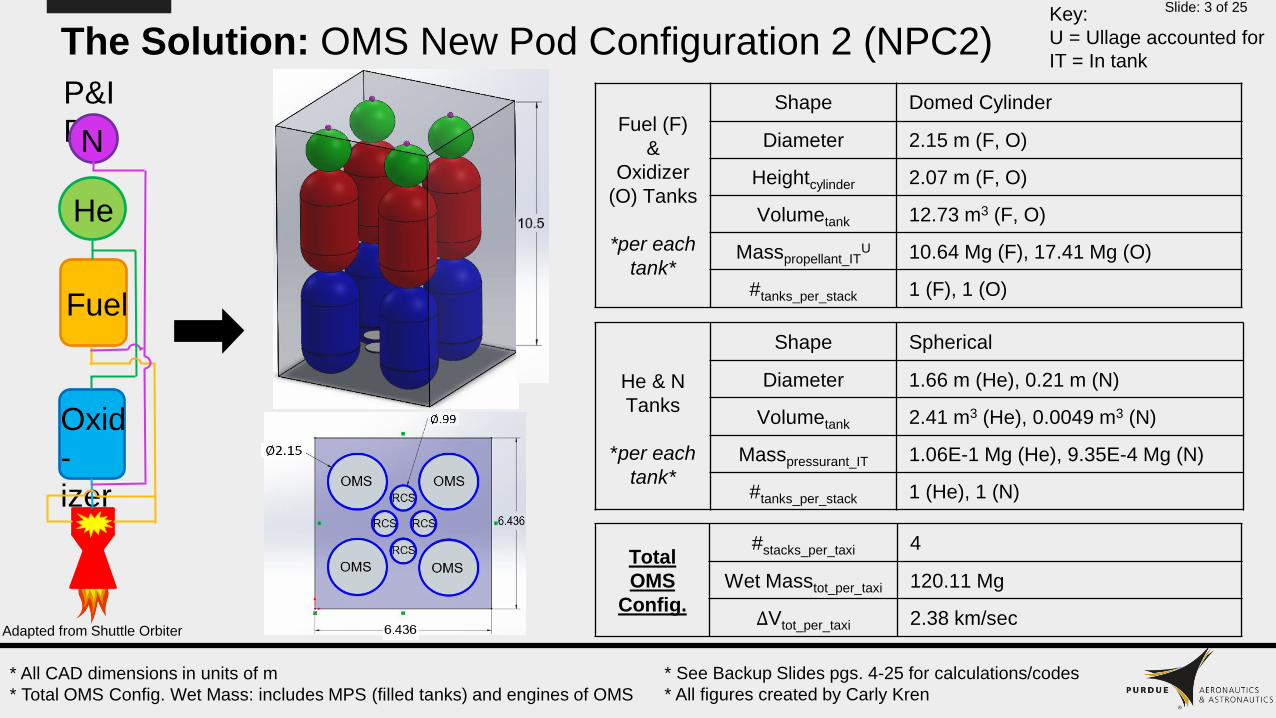
IT = In tankThe Solution: OMS New Pod Configuration 2 (NPC2)
* All CAD dimensions in units of m
* Total OMS Config. Wet Mass: includes MPS (filled tanks) and engines of OMS
P&I
D Fuel (F)
&
Oxidizer
(O) Tanks
*per each
tank*
Shape Domed Cylinder
Diameter 2.15 m (F, O)
Heightcylinder 2.07 m (F, O)
Volumetank 12.73 m3 (F, O)
Masspropellant_ITU 10.64 Mg (F), 17.41 Mg (O)
#tanks_per_stack 1 (F), 1 (O)
He & N
Tanks
*per each
tank*
Shape Spherical
Diameter 1.66 m (He), 0.21 m (N)
Volumetank 2.41 m3 (He), 0.0049 m3 (N)
Masspressurant_IT 1.06E-1 Mg (He), 9.35E-4 Mg (N)
#tanks_per_stack 1 (He), 1 (N)
Total
OMS
Config.
#stacks_per_taxi 4
Wet Masstot_per_taxi 120.11 Mg
∆Vtot_per_taxi 2.38 km/sec
Slide: 3 of 25
He
N
Fuel
Oxid
-
izer
Adapted from Shuttle Orbiter
* See Backup Slides pgs. 4-25 for calculations/codes
* All figures created by Carly Kren
February 20, 2020
Griffin Pfaff
Propulsion
Cycler - Main Propulsion System

The Problem
• Compare cryogenic propellants
to Hall Thrusters
• Minimize mass and volume
• Efficiently placed on cycler
• Accurately complete trajectory
requirements
Image by Adam Brewer

Solution
• 10 X3 Nested Hall
Thrusters[1]
• Xenon over Krypton
propellant
• Convert from liquid to
gas to minimize volume
Next Steps
• Solidify positioning on
cycler
• Calculate tank weight
and layout
Mass
(Mg)
Power
(MW)
Volume
(m^3)
Force (N)
72.58 1 23.89 54
Propellant ISP Mass (Mg)
Cryogenic[2]
(LOX/LH2)
450 397.6
X3 Nested
Hall
Thruster[1]
(Xenon)
2470 70.3

February 20, 2020
Arch Pleumpanya
Propulsion Team
Mass Driver

Problem
Cons of mass driver:
- Inefficient
- Strong and coupled magnetic fields
- Effects on humans and circuitry
Pros of maglev system:
- Mature technology [1]
- Less problem associated with coil synchronization
- Speed adjustable by frequency of AC supply
- Simple tracks
[1] Takeshita, T., Kitagawa, W., Asai, I., Nakazawa, H., & Furuhashi, Y. (2012). A museum filled with past, present and future in high speed railway -SCMAGLEV
and railway park. Journal of the Institute of Electrical Engineers of Japan, 132(10), 673-676.
Taxi vehicle
Aluminum plate
Coils
Force

Determined Parameters
- Propellant saved:
- 123 Mg at Luna
- 477 Mg at Mars
- Referring to previous presentation
- Assuming 50% of vehicle mass for
support structure
- 2 g’s acceleration limit [2]
Mars Luna
Track length
[km]
635 159
Duration [min] 4:14 2:07
Force required
[MN]
2.943 2.943
Power required
[GW]
14.72 7.37
[2] Kevin Huang, Human Factors Team
February 20, 2020
Steven Lach
Structures
Tether Sling, ED Tether, and Mass Drivers
1

The Problem: Tether Updates and Preliminary Mass Driver Sled Design
• Tether Need: Update the mass
calculations based on changes to
design
• Mass Driver Need: Initial mass
estimate and material selection for
the sled
2

Solution
Mass Driver Sled
• Material: Aluminum 6061 T6
• Mass Dependent on Taxi dimensions and
mass
Next Steps
• Run Calculations for Mars and Luna tether
slings
• Select sheath material for gondola system
• Design the hub of the tether slings with the
torque arm
• Fatigue Analysis
• Taxi Connector
3
Electrodynamic Tether
Length (km) 337
Mass (Mg) 1436
0
Cross Sectional Area at
Tip (cm2)
154
Cross Sectional Area at
Base (cm2)
654
Phobos Tether Sling
Length (km) 632
Mass (Mg) 7520
0
Cross Sectional Area at
Tip (cm2)
154
Cross Sectional Area at
Base (cm2)
2324
February 20th, 2020
Nicki (Anna) Liu
Structures
Taxi Vehicle – Stringers/Materials
Slide 1 of 3

Problem: External Loads
Slide 2 of 3
Radial Force
Requirements:
• Minimize Mass
• Prevent buckling
under
compression or
shear loads
Ribs and Stringers help to distribute load throughout
the body and reinforce the structure [1]
• Capable of carrying both tensile and compressive
loads
Radial Force
[1] Arunkumar, K. N., and Lohith, N., “Effect of Ribs and Stringer Spacings on the Weight of Aircraft Structure for Aluminum Material,” ARPN Journal of
Engineering and Applied Sciences, vol. 12, Jan. 2012, pp. 1006–1012.
• Keep skin from
bending due to
external loads

Vehicle Design
ComponentMass
(Mg)
Volume
(m3)
Available
Volume
(m3)
Needed
Support
Structure24.3 N/A N/A
Passenger
Vessel [1] [2]2.59 225 16
Cargo Vessel
[1] [2]10.1 225 80
Prop [3] 137 471 435
Total 174 921 530
[1] AAE 450: Human Factors: Emily Schott, Kait Hauber, Sarah Culp
[2] AAE 450: Power and Thermal: Dean Lontoc
[3] AAE 450: Propulsion: Carly Kren
[4] AAE 450: Human Factors: Sarah Culp
Moments of Inertia
(Mg * m2)*
Principal Moments
of Inertia (Mg * m2)*
Ixx = 1.805 * 104 Px = 267
Iyy = 1.805 * 104 Py = 620.1
Izz = 2.67 * 102 Pz = 620.5
[5] Arunkumar, K. N., and Lohith, N., “Effect of Ribs and Stringer Spacings on the Weight of Aircraft Structure for
Aluminum Material,” ARPN Journal of Engineering and Applied Sciences, vol. 12, Jan. 2012, pp. 1006–1012.
[6] Imran, M., Shi, D., Tong, L., and Waqas, H. M., “Design optimization of composite submerged cylindrical
pressure hull using genetic algorithm and finite element analysis,” Ocean Engineering
Slide 3 of 3
Rib spacing: 0.76 m
apart for 25 ribs total
Stringer spacing: 0.5 m
apart for 60 stringers total
Front View:
Figures adapted from [5],
drawn by [4]
Composite Pressure Vessel [6]
0.5 cm
0.5 cm

February 20th, 2020
Backup Slides
Slide 1 of 3
Backup Slides Juliann Mahon
• Extra Sketches
• Sketch of the ed tether
• Movement of the ED tether in GEO and the
release of the taxi towards the cycler orbit

Backup Slide 1
Chair Example
All Drawings and Figures by
William Sanders

Backup Slide 2 (previous design for reference)
All Drawings and Figures by
William Sanders

Backup Slide: Superstructure Focus
69
● The superstructure is now 60 m long (including 5 m endcaps)
● 4 docking stations
● Superstructure is motionless relative to rotating habitation modules
● 2 comms devices (location only, setup to enable continuous reception)
● 8 total minor props for controls
● 1 major prop for primary acceleration
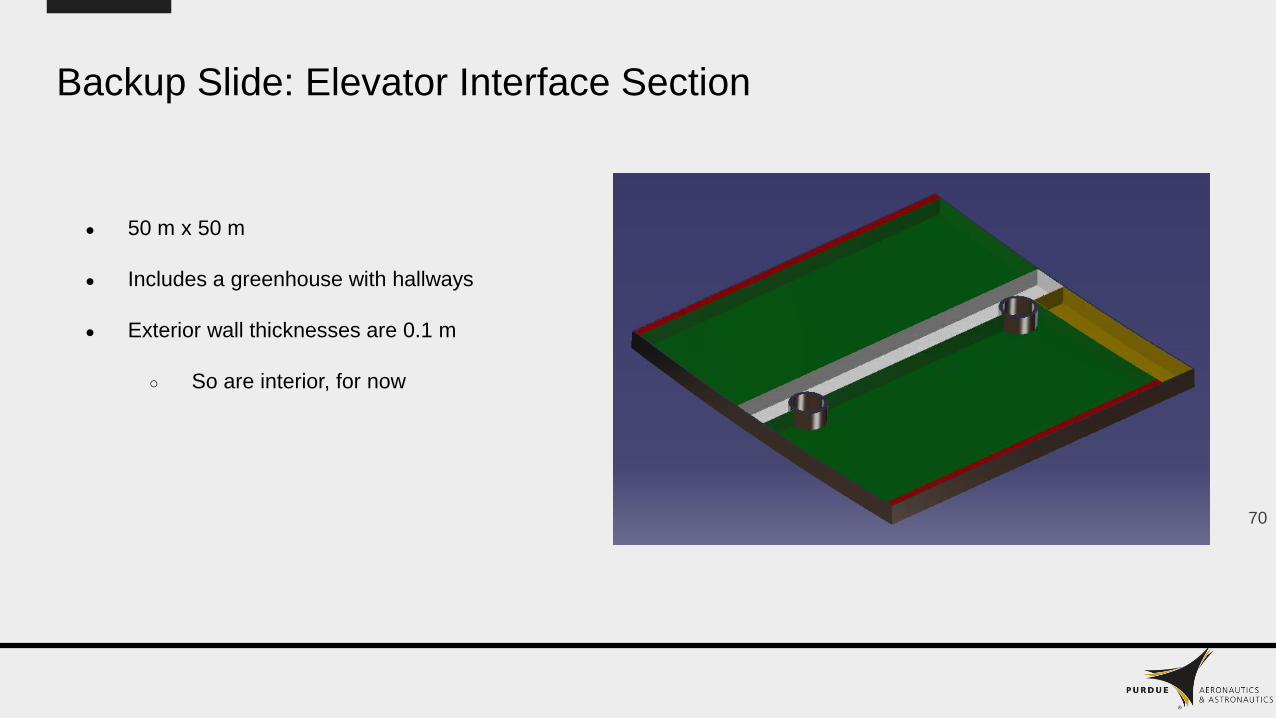
Backup Slide: Elevator Interface Section
70
● 50 m x 50 m
● Includes a greenhouse with hallways
● Exterior wall thicknesses are 0.1 m
○ So are interior, for now

Backup Slide: HAB Modules
71
● Total length: 76 m (technically an arc)
● Personal chambers (dark grey)
● Showers (cyan)
● Life support (red)
● Kitchen/commons (light grey)
● All connected by a hallway

Backup Slide: MATLAB Code for Solar Radiation Correction
72
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Aaron Engstrom | AAE 450 | Section 2 %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all
clc
%-----------------------------
%QUESTION:
%IS THE SOLAR PRESSURE ON THE SOLAR PANELS SIGNIFICANT ENOUGH TO AFFECT THEIR CONFIGURATION?
%THEORY:
%CALCULATE THE NECESSARY BALANCING FORCE FROM THE MINOR THRUSTERS ON THE SUPERSTRUCTURE, AND COMPARE TO CORRECTIVE ACTIONS ON THE
%I.S.S. TO JUSTIFY SIGNIFICANCE...
%CONSIDERATIONS:
%1. We round our researched values to 4 sig figs when applicable (for rapid assessment).
%2. The CM for the cycler is considered to be 2.5 m from that of the superstructure(SS), but both are still collinear with the SS longitudinal axis.
%3. Units are {[L],[M],[T]} = {[m],[kg],[s]}
%4. The SS CM is assumed to be at half its length
%5. Calculations are based on the cycler's average solar radius

Backup Slide: MATLAB Code for Solar Radiation Correction
73
%SOLUTION:
UA = 1.496 * 10^11; %standard astronomical units for Earth's average solar radius
rMarsVsUAEarth = 1.524; %ratio of Mars' average solar radius to Earth's
rMars = rMarsVsUAEarth * UA; %Mars' average solar radius
rCycler = (UA + rMars) / 2; %average solar radius of the cycler
PSun = 3.8 * 10^26; %average power output by the Sun (in kg*m^2/s^3)
A = 13440; %solar paneling surface area (1 side) obtained from Jacob Nunez
c = 2.998 * 10^8; %speed of light
ISun = PSun / (4 * pi * rCycler ^ 2); %intensity of solar radiation
p = 2 * ISun / c; %surface pressure due to solar radiation
Fduetop = p * A; %force due to solar radiation pressure over one second
solarPanelW = 16.8; %solar panel width (length is 100 m)
solarPanelSep = .1; %estimate separation between panels or the first panels and end cap
SSLength = 45; %length of the superstructure
CMOffset = 2.5; %Cycler CM offset from SS CM
lengthCyclerCMtoCap = SSLength / 2 - CMOffset; %length from the solar panel mounting cap to the Cycler CM
Fduetopr = 2 * solarPanelW + 2 * solarPanelSep + lengthCyclerCMtoCap; %applicable radius for solar pressure on the moment about CM
minorPropSep = 1.5; %distance from minor prop axis' to end cap
minorPropr = SSLength - lengthCyclerCMtoCap - minorPropSep;
radiiRatio = Fduetopr / minorPropr;
balT = Fduetop * radiiRatio; %required balancing thrust
% Through simple anaylsis... by comparing our balT value (which is 0.1741 kg*m/s/s), that is the necessary balancing thrust from the minor props, to values for re-boosting
% on the I.S.S. to correct for atmospheric drag (which is 0.275 N for one second applied to a space-craft that is half as massive)... we can see that the torque about the CM
% of the cycler is insignificant.
%ANSWER:
%NO
Backup Slide: Addressing Taxi Docking Procedure
74
%QUESTION: How much time does the taxi have to slip between the two
%elevators?
%CONSIDERATIONS:
% 1. The final value will be slightly greater than the true value given geometric constraints of the habitation module.
% 2. We assume autopilot will perform this action, maximizing the
% probability for success to nearly 100%
%SOLUTION:
rotRate = 0.1566; %in rad/s
taxiOpportunityt = pi / rotRate; %in sec
%ANSWER:
%Nearly 20 seconds
%Initially, the taxi will wait between the two planes created by coaxial
%elevators and slightly beyond the radius of the floor of the habitation
%module.

References
Petty, J. I., “STS-113 Payloads,” National Aeronautics and Space Administration,
Oct. 2002.
“Reference Guide to the International Space Station,” National Aeronautics and
Space Administration, Sep. 2015.
“Shreve Room Layout,” Housing at Purdue University Available:
https://www.housing.purdue.edu/Housing/Residences/Shreve/layout.html.
75
References
[1] – Hamid Hemmati, Deep Space Optical Communications, Jet Propulsion
Laboratory, California Institute of Technology, Pasadena, CA, 2005, pp. 336
[2] - Shiotani, Bungo & Fitz-Coy, Norman & Asundi, Sharan. (2014). An End-to-
End Design and Development Life-Cycle for CubeSat class Satellites.
10.2514/6.2014-4194.
3
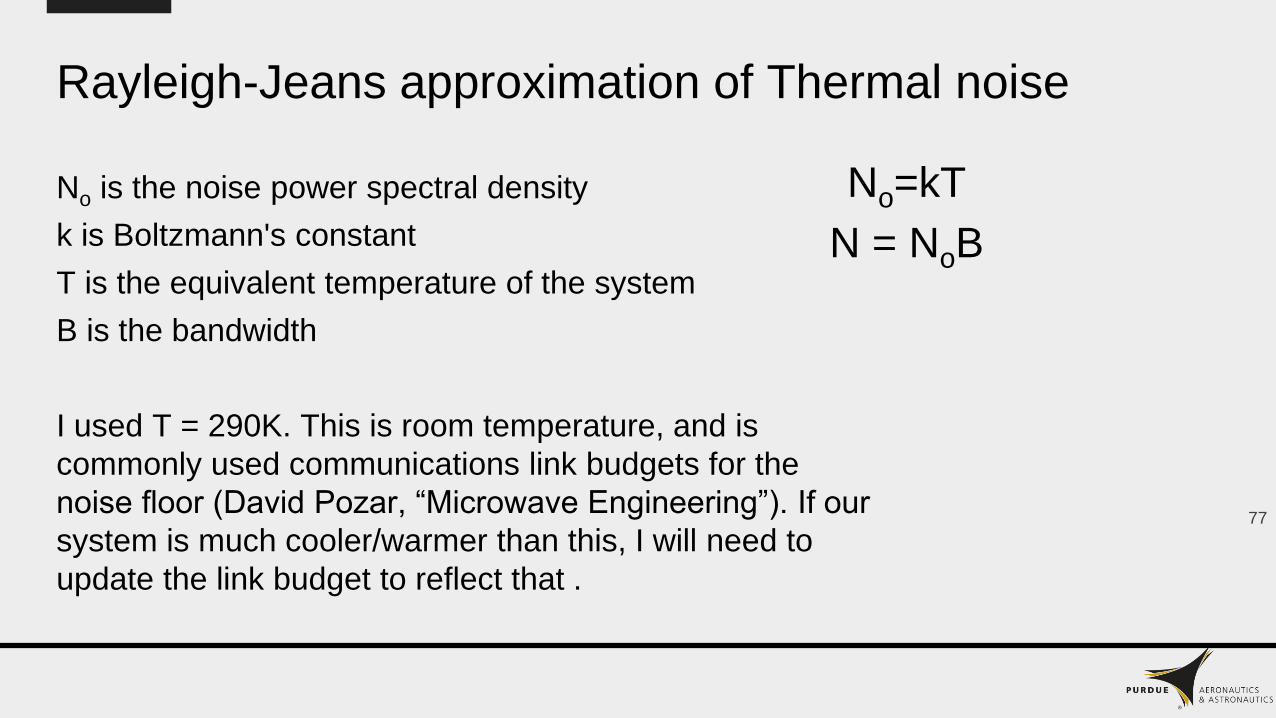
Rayleigh-Jeans approximation of Thermal noise
No is the noise power spectral density
k is Boltzmann's constant
T is the equivalent temperature of the system
B is the bandwidth
I used T = 290K. This is room temperature, and is
commonly used communications link budgets for the
noise floor (David Pozar, “Microwave Engineering”). If our
system is much cooler/warmer than this, I will need to
update the link budget to reflect that .
77
No=kT
N = NoB

Solar NoiseOptical System Noise
• The solar irradiance at 1550 nm is 0.3 W/(m2 nm) at 1 AU (Thuillier, G. “The Solar Spectral
Irradiance from 200 to 2400 nm”).
• The power follows an inverse square law, so at Mars, which has an orbital radius of 1.53 AU, the
solar irradiance at 1550 nm will be 0.3*(12/1.532) W/(m2 nm) which is ~0.128 W/(m2 nm).
• The power of the solar light is added to the power of the thermal noise power to estimate the total
noise in the optical systems.
RF System Noise
• In Ka-Band, the sun has an equivalent temperature of 6000K (Ho, C. “Solar Brightness Temperature
and Corresponding Antenna Noise Temperature at Microwave Frequencies”). The noise power
spectral density is then determined via the Rayleigh-Jeans approximation to be ~8.3x10-20 W/Hz
• This power is added to the thermal noise power of the system to estimate the total noise of the RF
systems. 78

Atmospheric Loss
For Ka-Band, typical atmospheric losses for Earth are ~4 dB but can be as
high as 50 dB in rare cases (~0.001% of the time) of large storms (Hemmati,
H., “Deep Space Optical Communications,”). My link budget accounts for the
4 dB case. For our system to deal with the extreme case, the link can be
completed by communicating with one of the other GEO satellites that have a
clear connection, or increase the number of receivers on Earth to decrease
the chance that they all will be in a storm.
At Mars, atmospheric losses are low, except in the case of dust storms. Even
in this extreme case, however, the loss of Ka-Band signals is ~3.4 dB
(Hemmati, H., “Deep Space Optical Communications,”). I account for this
worse case scenario since developing more infrastructure on Mars would be
more difficult than dealing with the extra 3 dB of loss.
79

Satellite Overview
80
GEO Satellites
● 3m
telescope
(to/from
Earth
Lagrange)
● 2x 2m
cross-link
antenna
● 0.5m
downlink
antenna
AEO Satellites
● 2.5m
telescope
(to/from
Mars
Lagrange)
● 2x 2m
cross-link
antenna
● 0.5m
downlink
antenna
Mars Lagrange
Satellites
● 2.5m
telescope
(to/from AEO)
● 4m telescope
(to/from Mars
Lagrange)
Earth Lagrange
Satellites
● 3m
telescope
(to/from
GEO)
● 4m
telescope Illustration by Eric
Smith

References
[1] Pozar, D. M., “Microwave Engineering”, Noise and Nonlinear Distortions, 4th edition., Wiley,
Hoboken, NJ, 2012.
[2]Thuillier, G., Hersé, M., Labs, D., Foujols, T., Peetermans, W., Gillotay, D., Simon, P., and
Mandel, H., “The Solar Spectral Irradiance from 200 to 2400 nm as Measured by the SOLSPEC
Spectrometer from the Atlas and Eureca Missions,” Solar Physics, Vol. 214, No. 1, ????, pp. 1–22.
https://doi.org/10.1023/A:1024048429145.
[3]Hemmati, H., “Deep Space Optical Communications,”Deep Space Optical Communications,
2006, pp. 1–705. https://doi.org/10.1002/0470042419.
[4]Ho, C., Slobin, S., Kantak, A., and Asmar, S., “Solar Brightness Temperature and Corresponding
Antenna Noise Temperature at Microwave Frequencies,”The Interplanetary Network . . ., 2008, pp.
1–11. URL http://ipnpr.jpl.nasa.gov/progress{_}report/42-175/175E.pdf
81

February 20, 2020
Kevin Huang
Presentation 2 Backup Slides

Sources
[1] Kumar, K. V., and Norfleet, W. T., “NASA Technical Reports Server
(NTRS)2008364NASA Technical Reports Server (NTRS). Washington, DC:
NASA Center for Aerospace Information Last visited June 2008. Gratis URL:
http://ntrs.nasa.gov/,” Issues on Human Acceleration Tolerance After Long-
Duration Space Flights, Oct. 1992, pp. 12–24.

Effects of Multiple G’s on HumansForward
Linear/Longitudinal
Acceleration
(+Gx): acceleration
one would
experience in a car
Table created from
Source [1]
G’s
experien
ced
Effects G’s
experienc
ed
1 breathing starts
quickening
2 dizziness; tolerable
up to 24 hours8
3-6 tightness in chest,
difficulty breathing,
shortness of breath,
blurring of vision,
difficulty speaking,
potentially
dangerous increase
in heartrate
9-12 breathing
becomes very
hard due to
pressure
imbalance in
lungs (blood
rushes to back of
chest)--decreased
oxygen delivery
7 UPPER LIMIT >12 pain in the chest;
loss of vision
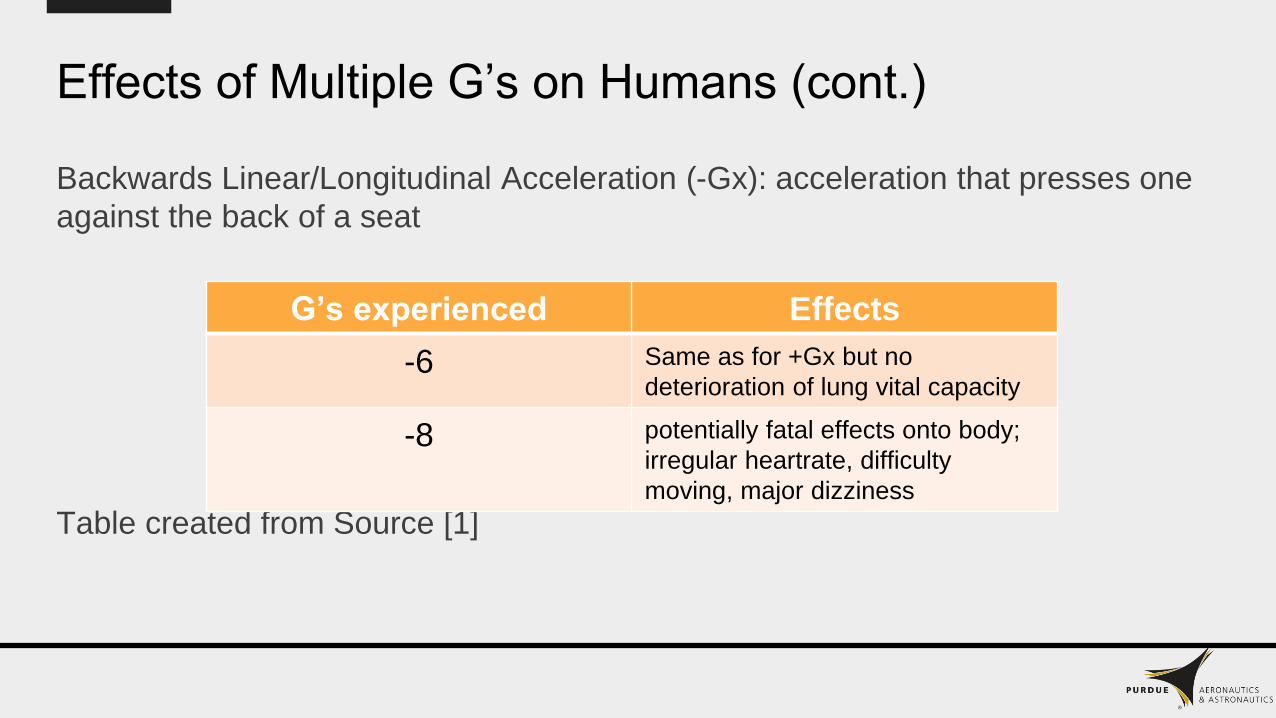
Effects of Multiple G’s on Humans (cont.)
Backwards Linear/Longitudinal Acceleration (-Gx): acceleration that presses one
against the back of a seat
Table created from Source [1]
G’s experienced Effects
-6 Same as for +Gx but no
deterioration of lung vital capacity
-8 potentially fatal effects onto body;
irregular heartrate, difficulty
moving, major dizziness

Effects of Multiple G’s on Humans (cont.)
While it was recommended that 2G’s was used, it is acceptable to use 3-4 G’s if it
is acceptable for the customers to experience discomfort for a while; the more
dangerous side-effects noted in previous slides are only relevant for people
already dispositioned to heart issues on top of the fact that they only start to get
relevant for the higher G’s

During Launch
Humans are more resilient to Gx accel. than centrifugal acceleration (Gz; gravity
is a form of Gz acceleration); therefore, for launch, recommend inclining seats to
reduce Gz vector and increase Gx vector
--Effective Physiologic Angle, or EPA [angle between acceleration vector and line
of spacecraft]: recommended to be between 8 to 12 degrees [1]

Linear Accelerations: Peak G’s experienced vs recommended maximum duration
G-Axis
Peak G's
Experienced
Time before
blackout (sec)
+Gz 12 0.04
5 0.1
3 180
-Gz 6 0.02
5 0.1
2 30
+Gx 25 0.04
15 0.2
8 150
-Gx 25 0.04
15 0.2
6 60

January 30, 2020
Walter Manuel – Backup Slides
Discipline: Human Factors
Vehicles/Systems: Cycler
Topic: Radiation Shielding
89
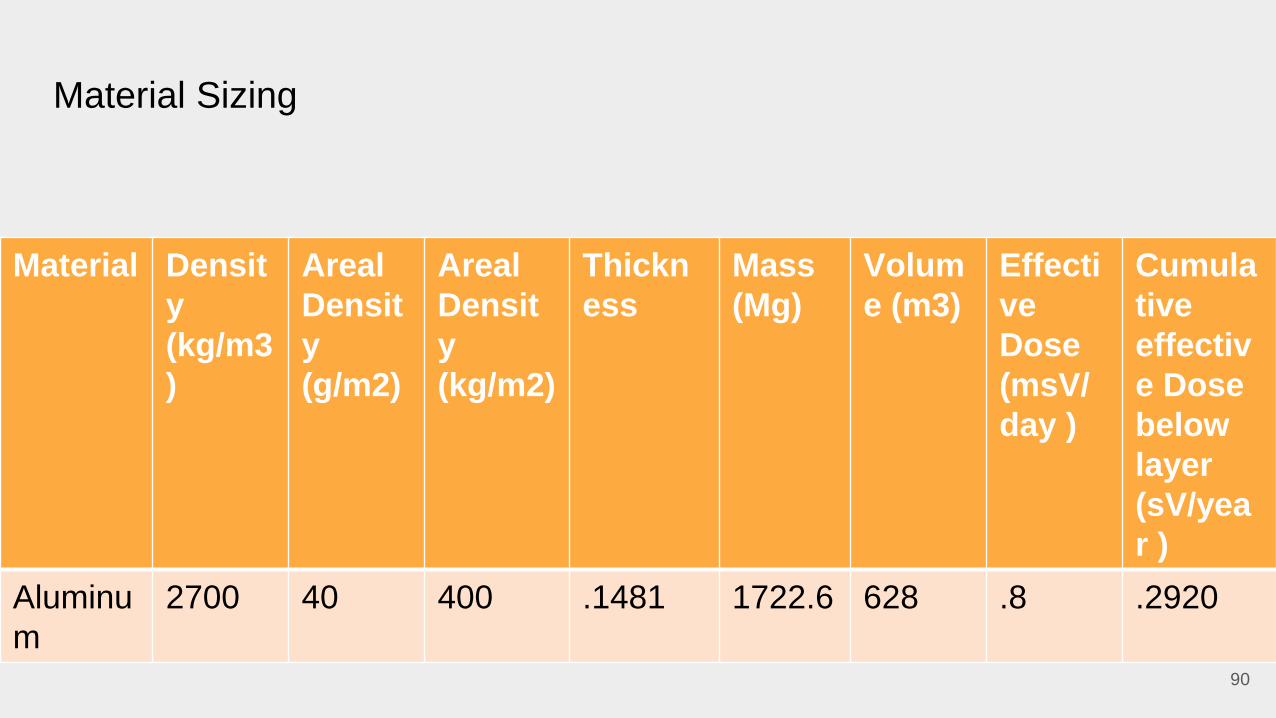
Material Sizing
90
Material Densit
y
(kg/m3
)
Areal
Densit
y
(g/m2)
Areal
Densit
y
(kg/m2)
Thickn
ess
Mass
(Mg)
Volum
e (m3)
Effecti
ve
Dose
(msV/
day )
Cumula
tive
effectiv
e Dose
below
layer
(sV/yea
r )
Aluminu
m
2700 40 400 .1481 1722.6 628 .8 .2920

Solar Particle Event Shielding Option
● “Storm Shelter” – Can be formed by reorganizing supplies or by having a designated area [6]
● Protective vests [7]
● Early warning and detection systems (EWDS) [8]
● Protective vests, used in conjunction with EWDS, were chosen as the solution to best protect the
crew from Solar Particle Events. During times of peak radiation, crew members will receive warning
and can don their protective vests. These protective vests are made of a combination of polyethylene
and are relatively thin, akin to a jacket. As a result, their mass is negligible, so they can be factored into
the mass and volume calculations as included in the crew personal belongs and articles of clothing.

References[1] https://www.nasa.gov/feature/goddard/2019/how-nasa-protects-astronauts-from-space-radiation-at-moon-mars-solar-cosmic-rays
[2 ]https://www.nasa.gov/feature/goddard/real-martians-how-to-protect-astronauts-from-space-radiation-on-mars
[3] NASA. (2008). The Radiation Challenge.
https://www.nasa.gov/pdf/284273main_Radiation_HS_Mod1.pdf
[4] Rais-Rohani, M. (2004). On Structural Design of a Mobile Lunar Habitat with Multi-Layered
Environmental Shielding. Retrieved from NASA Faculty Fellowship Program website:
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20050215340.pdf
[5] Bahadori, A., Semones, E., Ewert, M., Broyan, J., & Walker, S. (2017). Measuring space
radiation shielding effectiveness. EPJ Web of Conferences, 153, 04001.
doi:10.1051/epjconf/201715304001
[6] Mary Beth Griggs. (2016, September 23). This Is How Orion Astronauts Might Protect Themselves From
Radiation Storms. Retrieved from https://www.popsci.com/this-is-how-orion-astronauts-might-protect-
themselves-from-radiation-storms/
[7] Lockheed Martin. (n.d.). How a Wearable Vest Can Protect Astronauts on a Mission to
Mars. https://www.lockheedmartin.com/en-us/news/features/2016/stemrad-vest-space.html
[8 ]https://three.jsc.nasa.gov/articles/Shielding81109.pdf
[9] Li, X., Warden, D., & Bayazitoglu, Y. (2018). Analysis to Evaluate Multilayer Shielding of
Galactic Cosmic Rays. JOURNAL OF THERMOPHYSICS AND HEAT TRANSFER, 32(2).
Retrieved from DOI: 10.2514/1.T5292
92
February 20, 2020
Jordan Mayer
Mission Design
Communication Satellites
Backup Slides

Appendix A: References
1. Byrnes, D. V., Longuski, J. M., and Aldrin, B., “Cycler Orbit Between
Earth and Mars,” Journal of Spacecraft and Rockets, Vol. 30, No. 3,
1993, pp. 334-336.
2. Folta, D., and Vaughn, F., “A Survey of Earth-Moon Libration Orbits:
Stationkeeping Strategies And Intra-Orbit Transfers,” AIAA Paper
2004-4741, August 2004.
3. Lo, M., Llanos, P, and Hintz, G., “An L5 Mission to Observe the Sun
And Space Weather, Part 1,” AAS Paper 10-121, February 2010.
4. Williams, D., “Sun Fact Sheet,” Planetary Fact Sheet, NASA
Goddard Space Flight Center, retrieved 10 February 2020.
https://nssdc.gsfc.nasa.gov/planetary/factsheet/sunfact.html
5. Williams, D., “Earth Fact Sheet,” Planetary Fact Sheet, NASA
Goddard Space Flight Center, retrieved 10 February 2020.
https://nssdc.gsfc.nasa.gov/planetary/factsheet/earthfact.html

Appendix A: References
6. Williams, D., “Mars Fact Sheet,” Planetary Fact Sheet, NASA
Goddard Space Flight Center, retrieved 10 February 2020.
https://nssdc.gsfc.nasa.gov/planetary/factsheet/marsfact.html
NOTE: Williams not referenced in slides, but used to obtain necessary
values for orbit prediction
Appendix B: MATLAB Code
NOTE: The function kep2car.m was created by Dr. Carolin Frueh of
Purdue University, and is used with her permission. All other code was
created by Jordan Mayer.
Appendix B: MATLAB Code%%%%%
% AAE 450: Spacecraft Design
%
% Determine during which periods the Sun may interfere with optical
% communications between Earth, Mars, and the Sun-Mars L4 and L5 Lagrange
% points.
%
% Author: Jordan Mayer (Mission Design)
% Created: 01/27/2020
% Last Modified: 02/19/2020
%%%%%
%% Preliminary setup
clear all; close all; format compact;
addpath('../General Helper Functions/');
AU_to_km = 149597870.7; % astronomical unit
% Set constants and body parameters (from NASA Fact Sheets)
% Gravitational parameters (GM), km^3/s^2
mu_Sun = 132712e6;
mu_Earth = 0.39860e6;
mu_Mars = 0.042828e6;

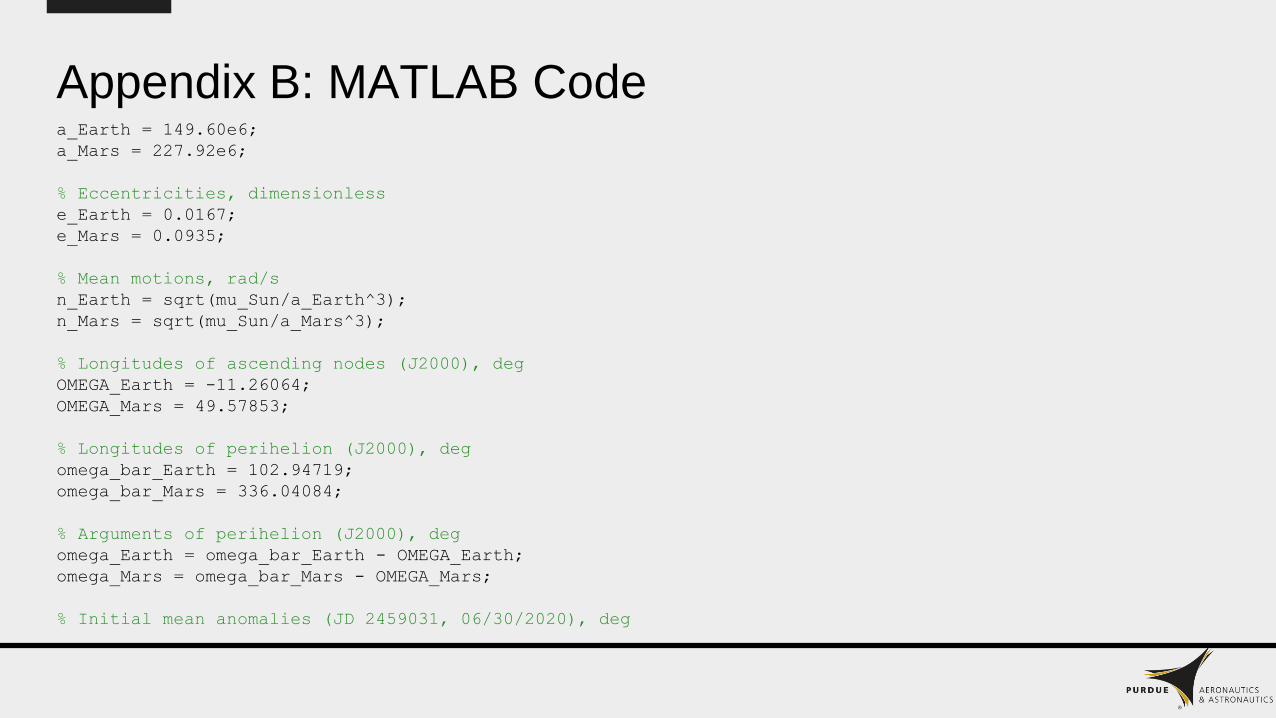
Appendix B: MATLAB Code% Semimajor axes, km
a_Earth = 149.60e6;
a_Mars = 227.92e6;
% Eccentricities, dimensionless
e_Earth = 0.0167;
e_Mars = 0.0935;
% Mean motions, rad/s
n_Earth = sqrt(mu_Sun/a_Earth^3);
n_Mars = sqrt(mu_Sun/a_Mars^3);
% Longitudes of ascending nodes (J2000), deg
OMEGA_Earth = -11.26064;
OMEGA_Mars = 49.57853;
% Longitudes of perihelion (J2000), deg
omega_bar_Earth = 102.94719;
omega_bar_Mars = 336.04084;
% Arguments of perihelion (J2000), deg
omega_Earth = omega_bar_Earth - OMEGA_Earth;
omega_Mars = omega_bar_Mars - OMEGA_Mars;
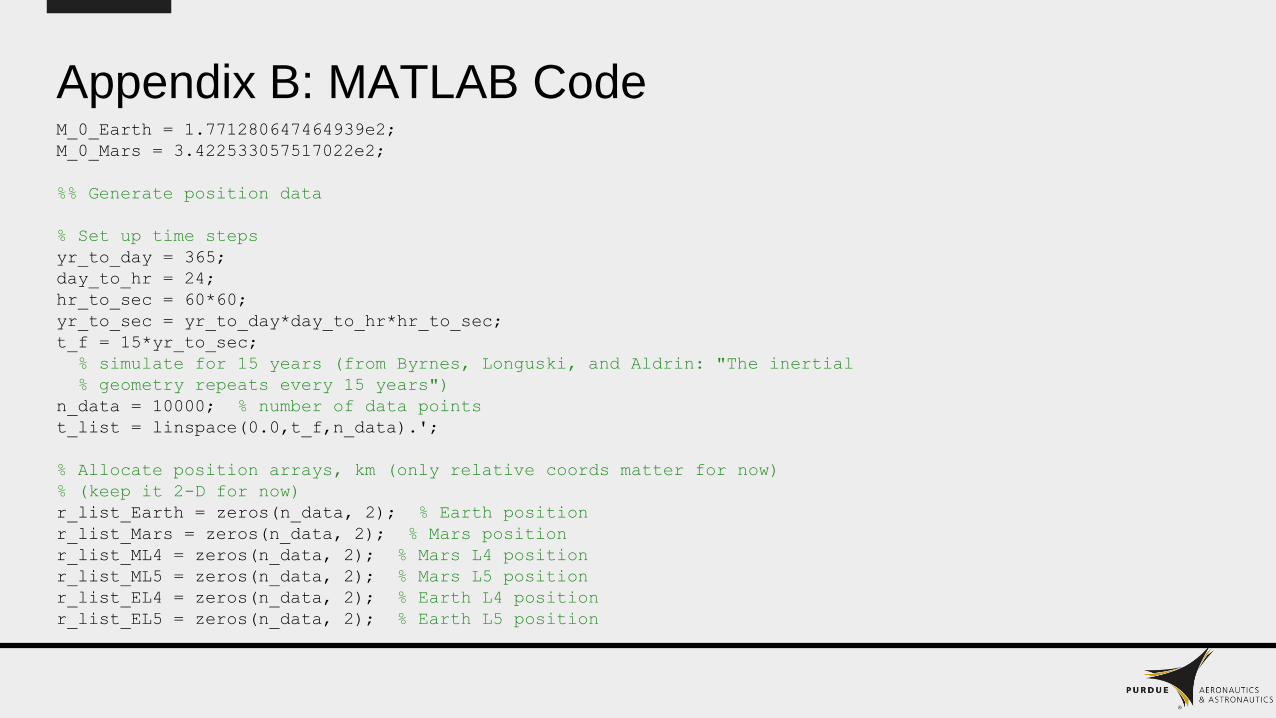
Appendix B: MATLAB Code% Initial mean anomalies (JD 2459031, 06/30/2020), deg
M_0_Earth = 1.771280647464939e2;
M_0_Mars = 3.422533057517022e2;
%% Generate position data
% Set up time steps
yr_to_day = 365;
day_to_hr = 24;
hr_to_sec = 60*60;
yr_to_sec = yr_to_day*day_to_hr*hr_to_sec;
t_f = 15*yr_to_sec;
% simulate for 15 years (from Byrnes, Longuski, and Aldrin: "The inertial
% geometry repeats every 15 years")
n_data = 10000; % number of data points
t_list = linspace(0.0,t_f,n_data).'; % all times, sec
% Allocate data arrays
% 2-D position arrays
r_list_Earth = zeros(n_data, 2);
r_list_Mars = zeros(n_data, 2);
r_list_ML4 = zeros(n_data, 2);
r_list_ML5 = zeros(n_data, 2);

Appendix B: MATLAB Coder_list_EL4 = zeros(n_data, 2);
r_list_EL5 = zeros(n_data, 2);
% Visibility arrays (0 if visible, 1 if not)
% ML: Mars-Sun Lagrange point
% EL: Earth-Sun Lagrange point
ML4_block_list = zeros(n_data, 1);
ML5_block_list = zeros(n_data, 1);
Mars_block_list = zeros(n_data, 1);
EL4_block_list = zeros(n_data, 1);
EL5_block_list = zeros(n_data, 1);
% Minimum distance arrays
min_dist_Earth_ML = zeros(n_data, 1); % Earth to closest ML4/ML5
min_dist_Mars_EL = zeros(n_data, 1); % Mars to closest EL4/EL5
min_dist_EL_ML = zeros(n_data, 1);
% Shortest distance between EL4/EL5 and ML4/ML5
% Prepare Keplerian element arrays
% [semimajor axis (km), eccentricity, inclination (deg), longitude of
% ascending node (deg), argument of periapsis (deg), mean anomaly (deg)]
kep_Earth = [a_Earth, e_Earth, 0.0, OMEGA_Earth, omega_Earth, M_0_Earth];
kep_Mars = [a_Mars, e_Mars, 0.0, OMEGA_Mars, omega_Mars, M_0_Mars];

Appendix B: MATLAB Code% Compute position data
for k = 1:n_data
delta_t = t_list(k);
% Compute mean anomalies, deg
M_Earth = M_0_Earth + rad2deg(n_Earth*delta_t);
M_Mars = M_0_Mars + rad2deg(n_Mars*delta_t);
% Update Keplerian element arrays
kep_Earth(6) = M_Earth;
kep_Mars(6) = M_Mars;
% Compute Cartesian vectors [position (km), velocity (km)]
car_Earth = kep2car(kep_Earth, mu_Sun, 'deg');
car_Mars = kep2car(kep_Mars, mu_Sun, 'deg');
if car_Earth(3) > 0 || car_Mars(3) > 0
error('3-D?');
end
% Get 3-D position vectors
r_Earth = car_Earth(1:3);
r_Mars = car_Mars(1:3);
r_ML4 = rot_mat_3(deg2rad(60)) * r_Mars;

Appendix B: MATLAB Coder_ML5 = rot_mat_3(deg2rad(-60)) * r_Mars;
r_EL4 = rot_mat_3(deg2rad(60)) * r_Earth;
r_EL5 = rot_mat_3(deg2rad(-60)) * r_Earth;
% Compute angles to Sun, as viewed from Earth
r_Earth_Sun = -r_Earth;
r_Earth_ML4 = r_ML4 - r_Earth;
r_Earth_Mars = r_Mars - r_Earth;
r_Earth_ML5 = r_ML5 - r_Earth;
r_Earth_EL4 = r_EL4 - r_Earth;
r_Earth_EL5 = r_EL5 - r_Earth;
theta_ML4_Earth = angle_between(r_Earth_Sun, r_Earth_ML4);
theta_ML5_Earth = angle_between(r_Earth_Sun, r_Earth_ML5);
theta_Mars = angle_between(r_Earth_Sun, r_Earth_Mars);
theta_EL4_Earth = angle_between(r_Earth_Sun, r_Earth_EL4);
theta_EL5_Earth = angle_between(r_Earth_Sun, r_Earth_EL5);
% Compute angles to Sun, as viewed from Mars
r_Mars_Sun = -r_Mars;
r_Mars_ML4 = r_ML4 - r_Mars;
r_Mars_Earth = -r_Earth_Mars;
r_Mars_ML5 = r_ML5 - r_Mars;
r_Mars_EL4 = r_EL4 - r_Mars;

Appendix B: MATLAB Coder_Mars_EL5 = r_EL5 - r_Mars;
theta_ML4_Mars = angle_between(r_Mars_Sun, r_Mars_ML4);
theta_ML5_Mars = angle_between(r_Mars_Sun, r_Mars_ML5);
theta_Earth = angle_between(r_Mars_Sun, r_Mars_Earth);
theta_EL4_Mars = angle_between(r_Mars_Sun, r_Mars_EL4);
theta_EL5_Mars = angle_between(r_Mars_Sun, r_Mars_EL5);
% Store 2-D positions
r_list_Earth(k,:) = r_Earth(1:2);
r_list_Mars(k,:) = r_Mars(1:2);
r_list_ML4(k,:) = r_ML4(1:2);
r_list_ML5(k,:) = r_ML5(1:2);
r_list_EL4(k,:) = r_EL4(1:2);
r_list_EL5(k,:) = r_EL5(1:2);
% Determine if any communications are blocked by the Sun
if theta_ML4_Earth <= 3 || theta_ML4_Mars <= 3
ML4_block_list(k) = 1;
end
if theta_ML5_Earth <= 3 || theta_ML5_Mars <= 3
ML5_block_list(k) = 2;
end
if theta_Mars <= 3 || theta_Earth <= 3
Mars_block_list(k) = 3;

Appendix B: MATLAB Codeend
if theta_EL4_Earth <= 3 || theta_EL4_Mars <= 3
EL4_block_list(k) = 1;
end
if theta_EL5_Earth <= 3 || theta_EL5_Mars <= 3
EL5_block_list(k) = 2;
end
if (ML4_block_list(k) == 1) && (ML5_block_list(k) == 2)
fprintf('Uh oh! Both Mars Lagrange points blocked!');
end
if (EL4_block_list(k) == 1) && (EL5_block_list(k) == 2)
fprintf('Uh oh! Both Earth Lagrange points blocked!');
end
if ((ML4_block_list(k) == 1) + (ML5_block_list(k) == 2) + ...
(EL4_block_list(k) == 1) + (EL5_block_list(k) == 2) >= 3)
fprintf('Uh oh! Only one visible relay!');
end
% Compute and store closest distances
dist_Earth_ML4 = norm(r_Earth_ML4);
dist_Earth_ML5 = norm(r_Earth_ML5);
dist_Mars_EL4 = norm(r_Mars_EL4);
dist_Mars_EL5 = norm(r_Mars_EL5);
dist_EL4_ML4 = norm(r_ML4 - r_EL4);
Appendix B: MATLAB Codedist_EL4_ML5 = norm(r_ML5 - r_EL4);
dist_EL5_ML4 = norm(r_ML4 - r_EL5);
dist_EL5_ML5 = norm(r_ML5 - r_EL5);
min_dist_Earth_ML(k) = min([dist_Earth_ML4, dist_Earth_ML5]);
min_dist_Mars_EL(k) = min([dist_Mars_EL4, dist_Mars_EL5]);
min_dist_EL_ML(k) = min([dist_EL4_ML4, dist_EL4_ML5, ...
dist_EL5_ML4, dist_EL5_ML5]);
end
%% Plot results
close all;
yr_list = t_list ./ yr_to_sec;
% Plot visibility of Lagrange points
figure(2);
subplot(2,1,1);
msize = 4;
plot(yr_list, ML4_block_list, 'sc', 'MarkerFaceColor', 'c', ...
'MarkerSize', msize); hold on;
plot(yr_list, ML5_block_list, 'sg', 'MarkerFaceColor', 'g', ...
'MarkerSize', msize);
plot(yr_list, Mars_block_list, 'sr', 'MarkerFaceColor', 'r', ...
'MarkerSize', msize);
ylim([0.5, 3.5]);

Appendix B: MATLAB Codeyticks([1, 2, 3]);
yticklabels({'ML4 Blocked', 'ML5 Blocked', 'Mars Blocked'});
xlabel('time, yrs');
grid on;
title('Visibility of Mars Lagrange Points');
subplot(2,1,2);
plot(yr_list, EL4_block_list, 'sc', 'MarkerFaceColor', 'c', ...
'MarkerSize', msize); hold on;
plot(yr_list, EL5_block_list, 'sg', 'MarkerFaceColor', 'g', ...
'MarkerSize', msize);
plot(yr_list, Mars_block_list, 'sr', 'MarkerFaceColor', 'r', ...
'MarkerSize', msize);
ylim([0.5, 3.5]);
yticks([1, 2, 3]);
yticklabels({'EL4 Blocked', 'EL5 Blocked', 'Mars Blocked'});
xlabel('time, yrs');
grid on;
title('Visibility of Earth Lagrange Points');
%% Compute Lagrange point visibility percentages
percent_ML4 = sum(ML4_block_list == 0)/n_data * 100
percent_ML5 = sum(ML5_block_list == 0)/n_data * 100
percent_ML_both = sum(ML4_block_list == 0 & ML5_block_list == 0)/n_data * 100

Appendix B: MATLAB Codepercent_EL4 = sum(EL4_block_list == 0)/n_data * 100
percent_EL5 = sum(EL5_block_list == 0)/n_data * 100
percent_EL_both = sum(EL4_block_list == 0 & EL5_block_list == 0)/n_data * 100

Appendix B: MATLAB Codefunction [car] = kep2car(kep,GM,atype)
% Name: kep2car.m
% Author: C. Frueh
% Purpose
% To compute the Cartesian position/velocity given Keplerian elements.
% Inputs
% kep - Keplerian elements, (6 x 1) vector with order semi-major axis,
% eccentricity, inclination, right-ascension of the ascending
% node, argument of periapse, mean anomaly
% mu - value of the gravitational parameter of the central body
% atype - units of the angles in the Keplerian elements, 'rad' or 'deg'
% Outputs
% car - Cartesian position/velocity
% Dependencies
% None
sma = kep(1);
ecc = kep(2);
inc = kep(3);
raan = kep(4);
argp = kep(5);
manm = kep(6);

Appendix B: MATLAB Codeif(strcmp(atype,'deg'))
inc = inc*(pi/180.0);
raan = raan*(pi/180.0);
argp = argp*(pi/180.0);
manm = manm*(pi/180.0);
end
itermax = 10;
toler = 1.0D-12;
delta = 1.0;
eanm = manm;
iter = 0;
while((iter < itermax) && (abs(delta) > toler))
iter = iter + 1;
delta = ((eanm - ecc*sin(eanm) - manm)/(1.0 - ecc*cos(eanm)));
eanm = eanm - delta;
end
tanm = 2.0*atan(sqrt((1.0+ecc)/(1.0-ecc))*tan(0.5*eanm));
% if ~isreal(tanm)
% keyboard
% end
r = sma*(1.0-ecc*cos(eanm));
slr = sma*(1.0-ecc*ecc);
angm = sqrt(GM*slr);

Appendix B: MATLAB Codevr = (angm/slr)*ecc*sin(tanm);
vf = (angm/slr)*(1.0+ecc*cos(tanm));
argl = argp + tanm;
cos_s = cos(argl);
sin_s = sin(argl);
cos_i = cos(inc);
sin_i = sin(inc);
cos_W = cos(raan);
sin_W = sin(raan);
R3s = [cos_s,sin_s,0.0;-sin_s,cos_s,0.0;0.0,0.0,1.0];
R1i = [1.0,0.0,0.0;0.0,cos_i,sin_i;0.0,-sin_i,cos_i];
R3W = [cos_W,sin_W,0.0;-sin_W,cos_W,0.0;0.0,0.0,1.0];
T = R3s*R1i*R3W;
x = T(1,1)*r;
y = T(1,2)*r;
z = T(1,3)*r;
xd = T(1,1)*vr + T(2,1)*vf;
yd = T(1,2)*vr + T(2,2)*vf;
zd = T(1,3)*vr + T(2,3)*vf;
car = [x;y;z;xd;yd;zd];
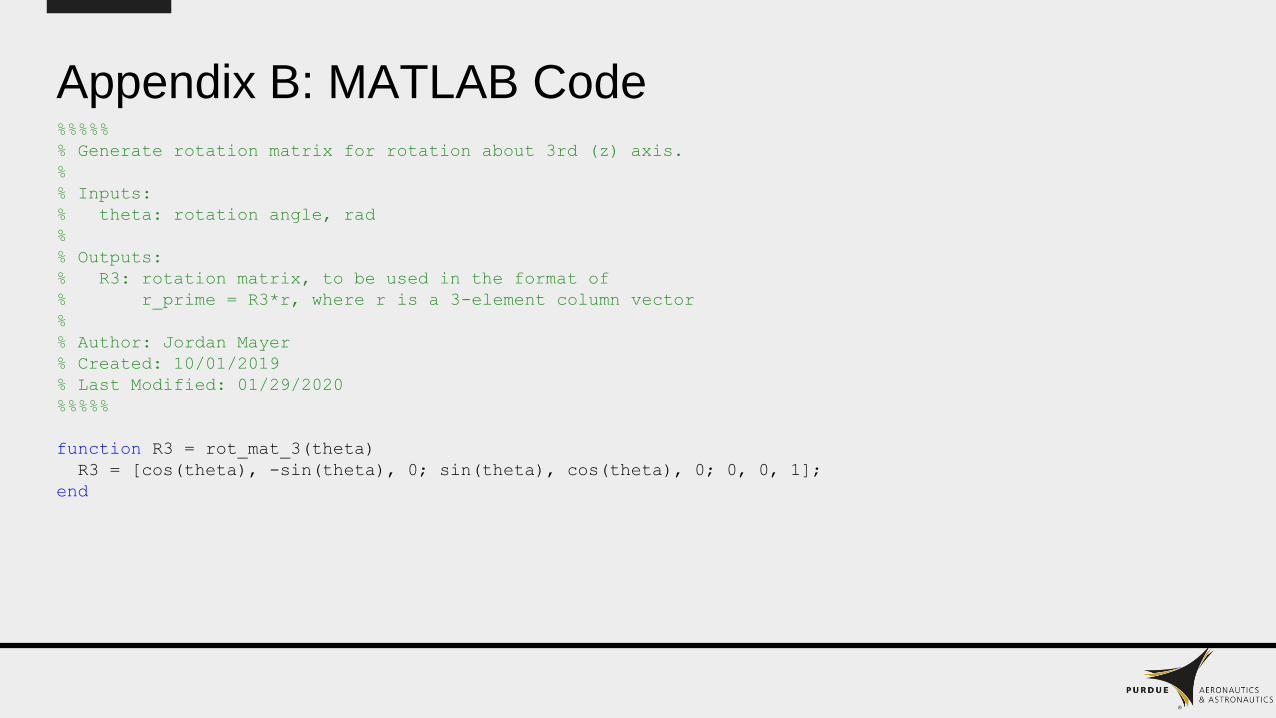
Appendix B: MATLAB Code%%%%%
% Generate rotation matrix for rotation about 3rd (z) axis.
%
% Inputs:
% theta: rotation angle, rad
%
% Outputs:
% R3: rotation matrix, to be used in the format of
% r_prime = R3*r, where r is a 3-element column vector
%
% Author: Jordan Mayer
% Created: 10/01/2019
% Last Modified: 01/29/2020
%%%%%
function R3 = rot_mat_3(theta)
R3 = [cos(theta), -sin(theta), 0; sin(theta), cos(theta), 0; 0, 0, 1];
end
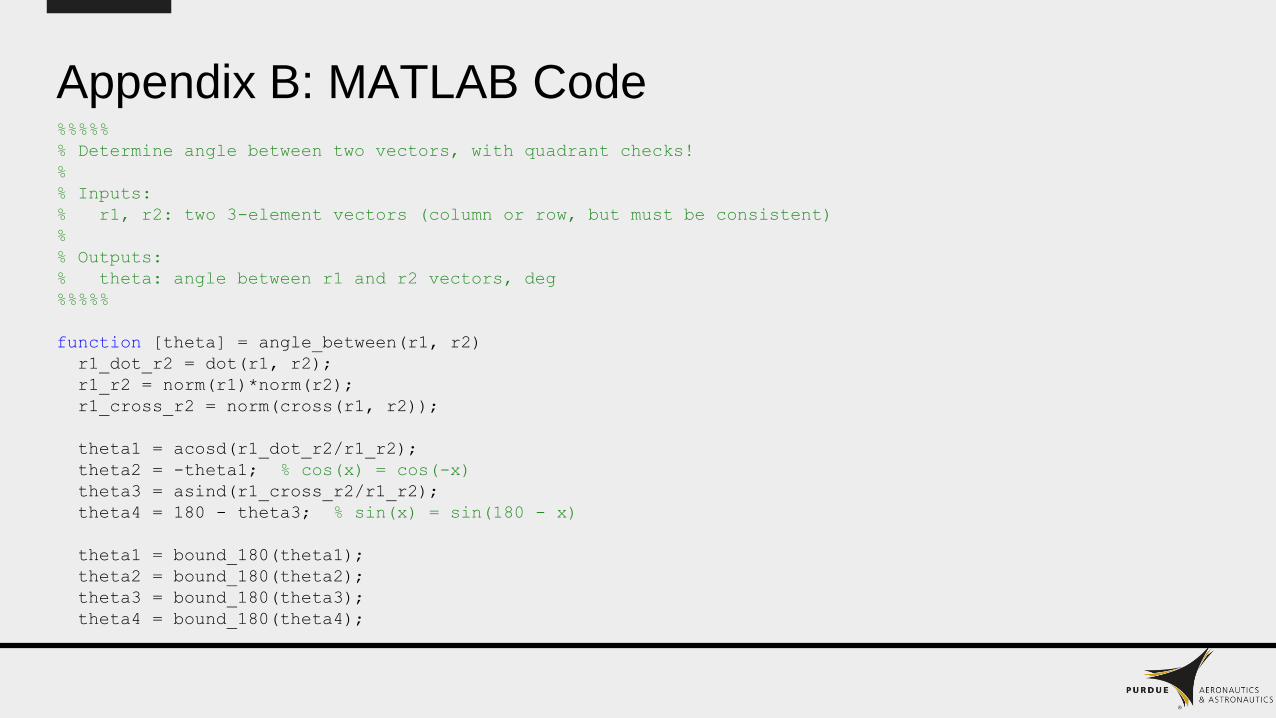
Appendix B: MATLAB Code%%%%%
% Determine angle between two vectors, with quadrant checks!
%
% Inputs:
% r1, r2: two 3-element vectors (column or row, but must be consistent)
%
% Outputs:
% theta: angle between r1 and r2 vectors, deg
%%%%%
function [theta] = angle_between(r1, r2)
r1_dot_r2 = dot(r1, r2);
r1_r2 = norm(r1)*norm(r2);
r1_cross_r2 = norm(cross(r1, r2));
theta1 = acosd(r1_dot_r2/r1_r2);
theta2 = -theta1; % cos(x) = cos(-x)
theta3 = asind(r1_cross_r2/r1_r2);
theta4 = 180 - theta3; % sin(x) = sin(180 - x)
theta1 = bound_180(theta1);
theta2 = bound_180(theta2);
theta3 = bound_180(theta3);
theta4 = bound_180(theta4);

Appendix B: MATLAB Codewiggle = 0.00001;
if abs(theta1 - theta3) < wiggle || abs(theta1 - theta4) < wiggle
theta = theta1;
elseif abs(theta2 - theta3) < wiggle || abs(theta2 - theta4) < wiggle
theta = theta2;
else
fprintf('\ntheta1 = %.4f\n', theta1);
fprintf('theta2 = %.4f\n', theta2);
fprintf('theta3 = %.4f\n', theta3);
fprintf('theta4 = %.4f\n', theta4);
error('no consistent theta');
end
end

Appendix B: MATLAB Code%%%%%
% AAE 450: Spacecraft Design
%
% Determine distances between Earth, Mars, and four possible interplanetary
% relay satellite locations (Sun-Earth L4 and L5, and Sun-Mars L4 and L5).
%
% Author: Jordan Mayer (Mission Design)
% Created: 02/04/2020
% Last Modified: 02/05/2020
%%%%%
%% Preliminary setup
format compact;
addpath('../General Helper Functions/');
AU_to_km = 149597870.700; % Astronomical Units to km
% Set constants and body parameters (from NASA Fact Sheets)
% Gravitational parameters (GM), km^3/s^2
mu_Sun = 132712e6;
mu_Earth = 0.39860e6;
mu_Mars = 0.042828e6;
% Semimajor axes, km
Appendix B: MATLAB Codea_Earth = 149.60e6;
a_Mars = 227.92e6;
% Eccentricities, dimensionless
e_Earth = 0.0167;
e_Mars = 0.0935;
% Mean motions, rad/s
n_Earth = sqrt(mu_Sun/a_Earth^3);
n_Mars = sqrt(mu_Sun/a_Mars^3);
% Longitudes of ascending nodes (J2000), deg
OMEGA_Earth = -11.26064;
OMEGA_Mars = 49.57853;
% Longitudes of perihelion (J2000), deg
omega_bar_Earth = 102.94719;
omega_bar_Mars = 336.04084;
% Arguments of perihelion (J2000), deg
omega_Earth = omega_bar_Earth - OMEGA_Earth;
omega_Mars = omega_bar_Mars - OMEGA_Mars;
% Initial mean anomalies (JD 2459031, 06/30/2020), deg
Appendix B: MATLAB CodeM_0_Earth = 1.771280647464939e2;
M_0_Mars = 3.422533057517022e2;
%% Generate position data
% Set up time steps
yr_to_day = 365;
day_to_hr = 24;
hr_to_sec = 60*60;
yr_to_sec = yr_to_day*day_to_hr*hr_to_sec;
t_f = 15*yr_to_sec;
% simulate for 15 years (from Byrnes, Longuski, and Aldrin: "The inertial
% geometry repeats every 15 years")
n_data = 10000; % number of data points
t_list = linspace(0.0,t_f,n_data).';
% Allocate position arrays, km (only relative coords matter for now)
% (keep it 2-D for now)
r_list_Earth = zeros(n_data, 2); % Earth position
r_list_Mars = zeros(n_data, 2); % Mars position
r_list_ML4 = zeros(n_data, 2); % Mars L4 position
r_list_ML5 = zeros(n_data, 2); % Mars L5 position
r_list_EL4 = zeros(n_data, 2); % Earth L4 position
r_list_EL5 = zeros(n_data, 2); % Earth L5 position

Appendix B: MATLAB Code% Allocate distance arrays, AU
dist_list_Earth_Mars = zeros(n_data, 1);
dist_list_Earth_ML4 = zeros(n_data, 1);
dist_list_Earth_ML5 = zeros(n_data, 1);
dist_list_Mars_EL4 = zeros(n_data, 1);
dist_list_Mars_EL5 = zeros(n_data, 1);
dist_list_EL4_ML4 = zeros(n_data, 1);
dist_list_EL4_ML5 = zeros(n_data, 1);
dist_list_EL5_ML4 = zeros(n_data, 1);
dist_list_EL5_ML5 = zeros(n_data, 1);
% Prepare Keplerian element arrays
% [semimajor axis (km), eccentricity, inclination (deg), longitude of
% ascending node (deg), argument of periapsis (deg), mean anomaly (deg)]
kep_Earth = [a_Earth, e_Earth, 0.0, OMEGA_Earth, omega_Earth, M_0_Earth];
kep_Mars = [a_Mars, e_Mars, 0.0, OMEGA_Mars, omega_Mars, M_0_Mars];
% Get that data!
for k = 1:n_data
delta_t = t_list(k);
% Compute mean anomalies, deg
M_Earth = M_0_Earth + rad2deg(n_Earth*delta_t);
M_Mars = M_0_Mars + rad2deg(n_Mars*delta_t);

Appendix B: MATLAB Code% Update Keplerian element arrays
kep_Earth(6) = M_Earth;
kep_Mars(6) = M_Mars;
% Compute Cartesian vectors [position (km), velocity (km)]
car_Earth = kep2car(kep_Earth, mu_Sun, 'deg');
car_Mars = kep2car(kep_Mars, mu_Sun, 'deg');
if car_Earth(3) > 0 || car_Mars(3) > 0
error('3-D?');
end
% Get 3-D position vectors, km
r_Earth = car_Earth(1:3);
r_Mars = car_Mars(1:3);
r_ML4 = rot_mat_3(deg2rad(60)) * r_Mars;
r_ML5 = rot_mat_3(deg2rad(-60)) * r_Mars;
r_EL4 = rot_mat_3(deg2rad(60)) * r_Earth;
r_EL5 = rot_mat_3(deg2rad(-60)) * r_Earth;
% Store 2-D positions
r_list_Earth(k,:) = r_Earth(1:2);
r_list_Mars(k,:) = r_Mars(1:2);
r_list_ML4(k,:) = r_ML4(1:2);
r_list_ML5(k,:) = r_ML5(1:2);
Appendix B: MATLAB Coder_list_EL4(k,:) = r_EL4(1:2);
r_list_EL5(k,:) = r_EL5(1:2);
% Compute distances, AU
dist_list_Earth_Mars(k) = norm(r_Mars - r_Earth)/AU_to_km;
dist_list_Earth_ML4(k) = norm(r_ML4 - r_Earth)/AU_to_km;
dist_list_Earth_ML5(k) = norm(r_ML5 - r_Earth)/AU_to_km;
dist_list_Mars_EL4(k) = norm(r_EL4 - r_Mars)/AU_to_km;
dist_list_Mars_EL5(k) = norm(r_EL5 - r_Mars)/AU_to_km;
dist_list_EL4_ML4(k) = norm(r_ML4 - r_EL4)/AU_to_km;
dist_list_EL4_ML5(k) = norm(r_ML5 - r_EL4)/AU_to_km;
dist_list_EL5_ML4(k) = norm(r_ML4 - r_EL5)/AU_to_km;
dist_list_EL5_ML5(k) = norm(r_ML5 - r_EL5)/AU_to_km;
end
%% Plot results
close all;
yr_list = t_list ./ yr_to_sec;
% Plot Earth distances
figure(1);
plot(yr_list, dist_list_Earth_Mars, '-r'); hold on;
plot(yr_list, dist_list_Earth_ML4, '-c');
Appendix B: MATLAB Codeplot(yr_list, dist_list_Earth_ML5, '-m');
title('Distances from Earth'); grid on;
legend('Mars', 'Sun-Mars L4', 'Sun-Mars L5');
xlabel('Time, years'); ylabel('Distance, AU');
% Plot Mars distances
figure(2);
plot(yr_list, dist_list_Earth_Mars, '-b'); hold on;
plot(yr_list, dist_list_Mars_EL4, '-c');
plot(yr_list, dist_list_Mars_EL5, '-m');
title('Distances from Mars'); grid on;
legend('Earth', 'Sun-Earth L4', 'Sun-Earth L5');
xlabel('Time, years'); ylabel('Distance, AU');
% Plot Lagrange point distances
figure(3);
plot(yr_list, dist_list_EL4_ML4, '-b'); hold on;
plot(yr_list, dist_list_EL4_ML5, '-c');
plot(yr_list, dist_list_EL5_ML4, '-r');
plot(yr_list, dist_list_EL5_ML5, '-m');
title('Distances between Lagrange Points'); grid on;
legend('EL4 to ML4', 'EL4 to ML5', 'EL5 to ML4', 'EL5 to ML5');
xlabel('Time, years'); ylabel('Distance, AU');

Appendix B: MATLAB Code%% Output max distances, AU
% Earth distances
fprintf('\nMax Earth distances:\n\n');
max_dist_Earth_Mars = max(dist_list_Earth_Mars)
max_dist_Earth_ML4 = max(dist_list_Earth_ML4)
max_dist_Earth_ML5 = max(dist_list_Earth_ML5)
min_dist_list_Earth = zeros(n_data,1);
for k=1:n_data
min_dist_list_Earth(k) = min([dist_list_Earth_Mars(k), ...
dist_list_Earth_ML4(k), ...
dist_list_Earth_ML5(k)]);
end
max_dist_Earth_any = max(min_dist_list_Earth)
% Mars distances
fprintf('\nMax Mars distances:\n\n');
max_dist_Mars_EL4 = max(dist_list_Mars_EL4)
max_dist_Mars_EL5 = max(dist_list_Mars_EL5)
min_dist_list_Mars = zeros(n_data,1);
for k=1:n_data
min_dist_list_Mars(k) = min([dist_list_Earth_Mars(k), ...
dist_list_Mars_EL4(k), ...
dist_list_Mars_EL5(k)]);
Appendix B: MATLAB Codeend
max_dist_Mars_any = max(min_dist_list_Mars)
% Lagrange point distances
fprintf('\nMax Lagrange point distances:\n\n');
max_dist_EL4_ML4 = max(dist_list_EL4_ML4)
max_dist_EL4_ML5 = max(dist_list_EL4_ML5)
max_dist_EL5_ML4 = max(dist_list_EL5_ML4)
max_dist_EL5_ML5 = max(dist_list_EL5_ML5)
min_dist_list_Earth_4 = zeros(n_data,1);
min_dist_list_Mars_4 = zeros(n_data,1);
%% Compute and plot/output "closest relay" distances
% Here, "closest" is how far a relay satellite at a Sun-Earth L4 or L5
% point would have to communicate to reach a Sun-Mars L4 or L5 point
% satellite. The "2nd closest" distance is also computed in an attempt to
% assess the redundancy of the system.
dist_closest = zeros(n_data, 1);
dist_2nd_closest = zeros(n_data, 1);
for k = 1:n_data
relay_dists = sort([a_Mars, a_Earth, dist_list_Earth_Mars(k), ...
dist_list_EL4_ML4(k), dist_list_EL4_ML5(k), ...
dist_list_EL5_ML4(k), dist_list_EL5_ML5(k)]);
Appendix B: MATLAB Codedist_closest(k) = relay_dists(1);
dist_2nd_closest(k) = relay_dists(2);
end
figure(4);
plot(yr_list, dist_closest, '-b'); hold on;
plot(yr_list, dist_2nd_closest, '-r'); hold on;
title('Closest Distances between Earth L4/L5 and Mars L4/L5');
grid on; xlabel('Time, years'); ylabel('Distance, AU');
legend('Closest', '2nd Closest');
fprintf('\nMax "closest relay" distances:\n\n');
max_dist_closest = max(dist_closest)
max_dist_2nd_closest = max(dist_2nd_closest)

February 20th, 2020
Colin Miller -Backup
Mission Design (Comm Sat)
Orbital Stability Analysis at Earth and Mars

Results
• Used GMAT for all simulations with:
• SRP on - cannon ball model, m = 2 Mg, Area = 42m2
• Gravity model for Earth and Mars were 10x10, and Earth used JGM-2
model, Jaccia-Roberts for drag, and included the Moon as a point mass
• Derivatives (deg/day) were simply the differences in the angular
positions divided by the differences in time
• Model point mass gravities of different relevant bodies via a = Gm/r2 to filter
which bodies were necessary to model
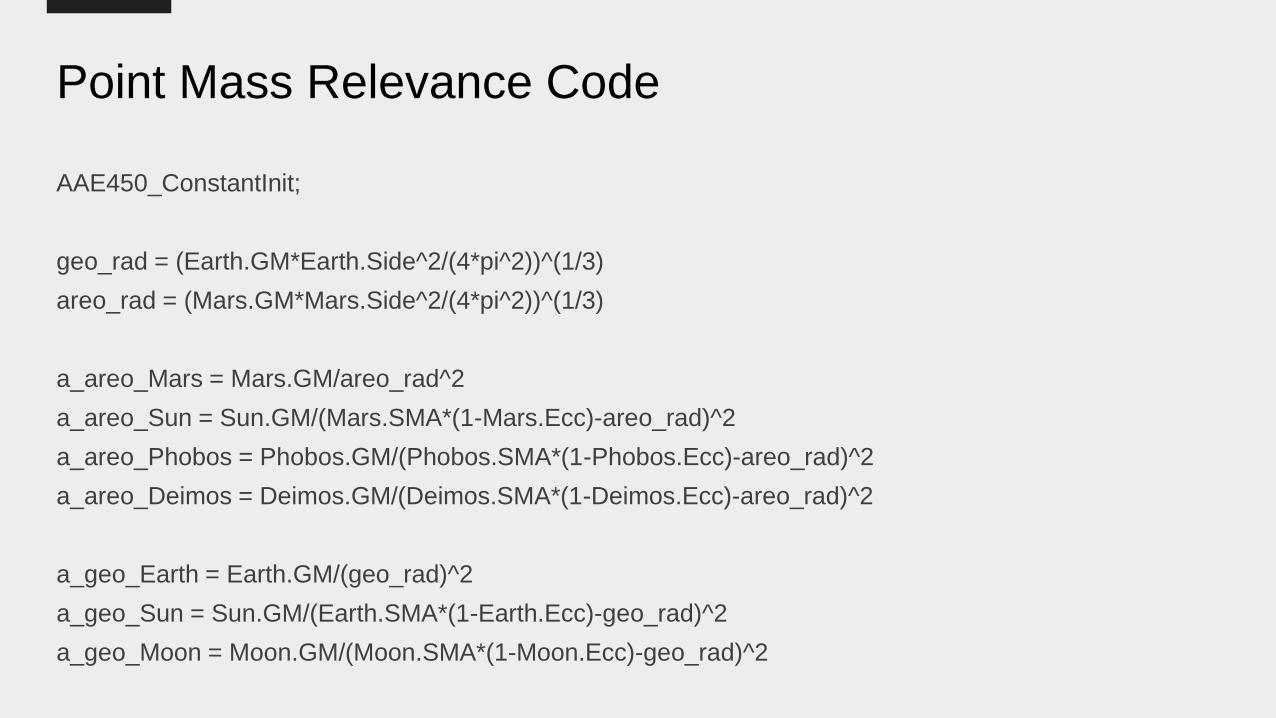
Point Mass Relevance Code
AAE450_ConstantInit;
geo_rad = (Earth.GM*Earth.Side^2/(4*pi^2))^(1/3)
areo_rad = (Mars.GM*Mars.Side^2/(4*pi^2))^(1/3)
a_areo_Mars = Mars.GM/areo_rad^2
a_areo_Sun = Sun.GM/(Mars.SMA*(1-Mars.Ecc)-areo_rad)^2
a_areo_Phobos = Phobos.GM/(Phobos.SMA*(1-Phobos.Ecc)-areo_rad)^2
a_areo_Deimos = Deimos.GM/(Deimos.SMA*(1-Deimos.Ecc)-areo_rad)^2
a_geo_Earth = Earth.GM/(geo_rad)^2
a_geo_Sun = Sun.GM/(Earth.SMA*(1-Earth.Ecc)-geo_rad)^2
a_geo_Moon = Moon.GM/(Moon.SMA*(1-Moon.Ecc)-geo_rad)^2

References
[1] “Earth Fact Sheet.” NASA, NASA,
nssdc.gsfc.nasa.gov/planetary/factsheet/earthfact.html.
[2] “Mars Fact Sheet.” NASA, NASA,
nssdc.gsfc.nasa.gov/planetary/factsheet/marsfact.html.
[3] Silva, Juan J., and Pilar Romero. “Optimal Longitudes Determination for
the Station Keeping of Areostationary Satellites.” Planetary and Space
Science, Pergamon, 17 Feb. 2013,
www.sciencedirect.com/science/article/pii/S0032063313000044#bbib11.
[4] Romero, Pilar, and Jose M. Gambi. “Optimal Control in the East/West
Station-Keeping Manoeuvres for Geostationary Satellites.” Aerospace
Science and Technology, Elsevier Masson, 1 Oct. 2004,
www.sciencedirect.com/science/article/pii/S1270963804000987.

Backup Slides - 1
Backup Slides - 2
(Note: Initial analysis is only
considering the force tangent to the
circular motion. This is just to get a
rough idea of the necessary spring
displacement. Spring values will
likely change with further
refinement.)

Backup Slides - 3

Backup Slides - 4

Backup Slides – 5Note: This spin-up time analysis was not presented on, but can be found in the tether folder of the share drive
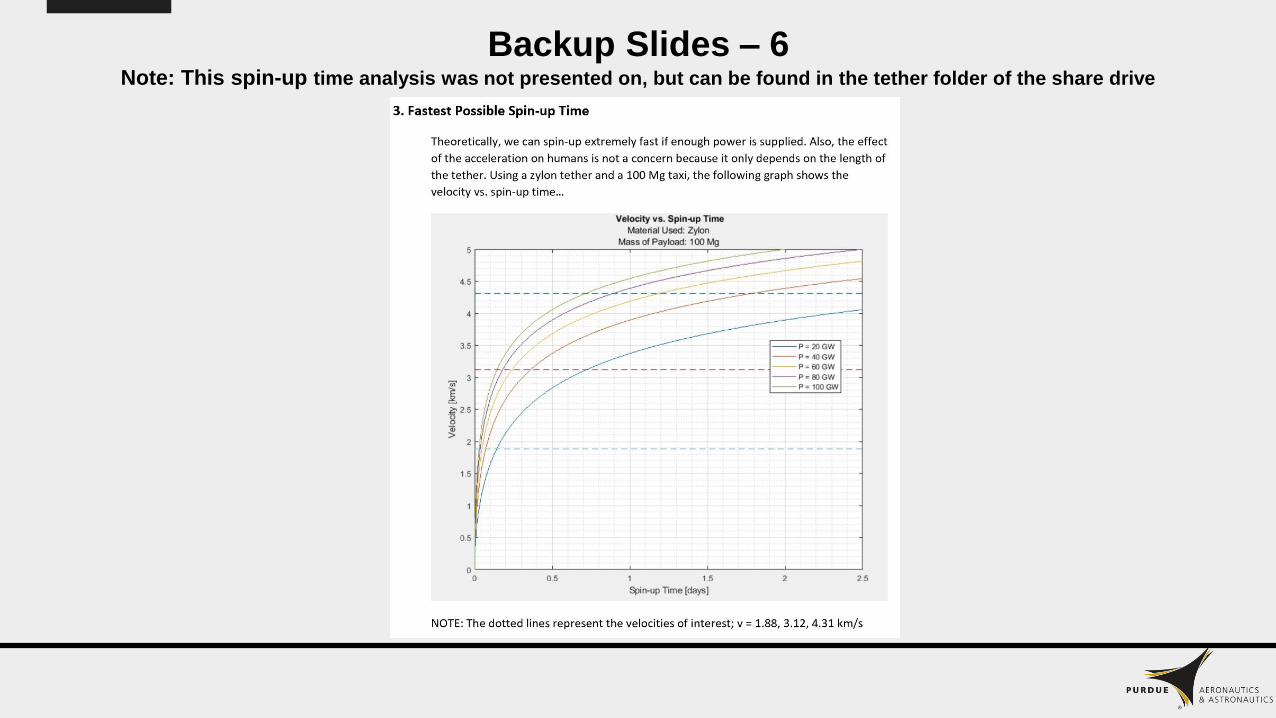
Backup Slides – 6Note: This spin-up time analysis was not presented on, but can be found in the tether folder of the share drive

Backup Slides – 7
MATLAB

February 20, 2020
Dean Lontoc
Backup Slides

Power Source Selection Matrix

Power Source Selection Matrix AnalysisAssumption: Taxi will have power fed to it when it is docked with cycler, tether, or at any launch facility.
Nuclear reactor analysis: Capable of providing continuous power throughout the entire mission, but it has a
massive amount of mass for the energy generated. The SNAP-10A weighed almost 1000kg and only generated
0.5 kW. Repairing it mid-flight could also prove to be a hazard due to radiation hazards. The spent nuclear fuel
is a potential issue in terms of sustainability.
Solar Array: This system is not capable of providing power for every stage of the mission. The solar array must
wait until the taxi vehicle is in space to deploy which would require a battery to power the taxi while it is not
deployed. In addition to that, the solar array would have to be jettisoned before entry into Mars’s atmosphere or
have a mechanism to tuck it away into the taxi. Maintenance on a broken solar array may require a spacewalk
which would be extremely dangerous for the astronauts. If the solar array is jettisoned before atmospheric entry,
creating disposable solar arrays may not be sustainable. It does have the advantage of having less mass and
volume than the other candidates.
Fuel Cell: This power system is in the goldilocks zone of power generation. It can provide continuous power at
every stage of the journey while having reasonable mass and volume. Repairing the fuel cells would be relatively
easy because they would be in the area under the astronauts. It is fully reusable, only requiring reactant resupply at
the end of a leg of the trip.

MATLAB Code
Plugging in mission duration outputs mass and volume
of the power system.

Liquid Oxygen and Hydrogen Storage
Using Power Reactant Storage (PRS)
Storage tanks are to be made of composite materials insulated with 0.25 double aluminized mylar
wrapped in layers over the tank.
10-watt heaters are needed to maintain pressure in tanks, no other power source needed.
PRS systems in the past have successfully spent 21 days in orbit with minimal boil-off.

SourcesA Basic Overview of Fuel Cell Technology Available: https://americanhistory.si.edu/fuelcells/basics.htm.
Aggarwal, V., “Solar Panel Efficiency: What Panels Are Most Efficient?: EnergySage,” Solar News Available:
https://news.energysage.com/what-are-the-most-efficient-solar-panels-on-the-market/.
“An overview of Ball Aerospace cryogen storage and delivery ...” Available:
http://www.ball.com/aerospace/Aerospace/media/Aerospace/Downloads/Aero_tech-comp_cryogen-fuel-
storage.pdf?ext=.pdf.
Chato, D. (2011). NASA Perspectives on Cryo H2 Storage.
“Department of Energy ETEC Closure Project,” ETEC Available:
https://www.etec.energy.gov/Operations/Major_Operations/SNAP_Overview.php.
Dunbar, B., “Fuel Cell Use in the Space Shuttle,” NASA Available:
https://www.nasa.gov/topics/technology/hydrogen/fc_shuttle.html.
“ELECTRICAL POWER SYSTEM,” NASA Available: https://science.ksc.nasa.gov/shuttle/technology/sts-newsref/sts-
eps.html.
“HSF - The Shuttle,” NASA Available: https://spaceflight.nasa.gov/shuttle/reference/shutref/orbiter/eps/pwrplants.html.
“Power,” ESA Available: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/Power. “Power
Reactant Storage Assembly (PRSA) (Space Shuttle). PRSA hydrogen and oxygen DVT tank
refurbishment,” NASA Available: https://ntrs.nasa.gov/search.jsp?R=19940012449.

January 30, 2020
Jacob Nunez-Kearny - Backup
Power & Thermal
Cycler: Power Generation & Storage

Power system specifications
Data for chosen solar panel, battery and nuclear systems based on TRL rating of
greater than or equal to 4.
Solar Panels Cycler
Power(kW) 1100
Power Area (W/m^2) 300[2]
Specific Power (W/kg) 80[2]
Surface Area (m^2) 8516.112
Mass (kg) 31935.42
Batteries Cycler
Capacity (Amp-hr) 6000
Specific Energy
(Wh/kg) 300[1]
Mass/battery (kg) 20[1]
Total Mass (kg) 2400
RTGs Cycler
Power (kW) 100
Specific Power (W/kg) 7[4]
Total Mass (kg) 14285

Batteries vs nuclear power trade study
For comparison, a battery system was sized for supplying power to keep the
crew alive for 8 months compared to a nuclear radioisotope power system that
provides the same amount of power over the same time.
This study was performed to see if the cycler can house the crew for the longest
journey from Earth to Mars if the main power source was lost. It was also
examined if it would be possible to power the propulsion system with either
batteries or with nuclear power.
Radioisotope generator was chosen as the alternative power source as it is a
constant source of power used in space missions that does not rely upon the
sun.

Trade study dataCycler System Batteries
Power(kW) 1100
Specific Power (Wh/kg) 300[3]
Burn time(sec) 511999.8336
Crew Flight time (sec) 19353600
Energy Required - T (J) 511999833600
Energy Required - HF (J) 1935360000000
Storage Required - T (Wh) 142222176
Storage Required - HF
(Wh) 537600000
Battery Mass - T(kg) 474073.92
Battery Mass - HF(kg) 1792000
Total Battery Mass (kg) 2266073.92
Cycler System RTGs
Power(kW) 100
Specific Power (W/kg) 7[4]
Power Required - T (W) 1000000
Power Required - HF (W) 100000
Nuclear Mass - T(kg) 142857.1429
Battery Mass - HF(kg) 14285.71429
Total Battery Mass (kg) 157142.8571
Cycler
Max Earth to
Earth burn time
(days)
Max Earth to
Mars burn time
(days)
Max Mars to
Earth burn time
(days)
1 2.982706 0 5.925924
2 0 0 3.182045
3 3.582087 4.158183 0
4 1.738419 4.728474 0
Credit to Jennifer Bergeson (MD) for
burn time data.
T is for power
required for
burns. HF is
power required
for life support.
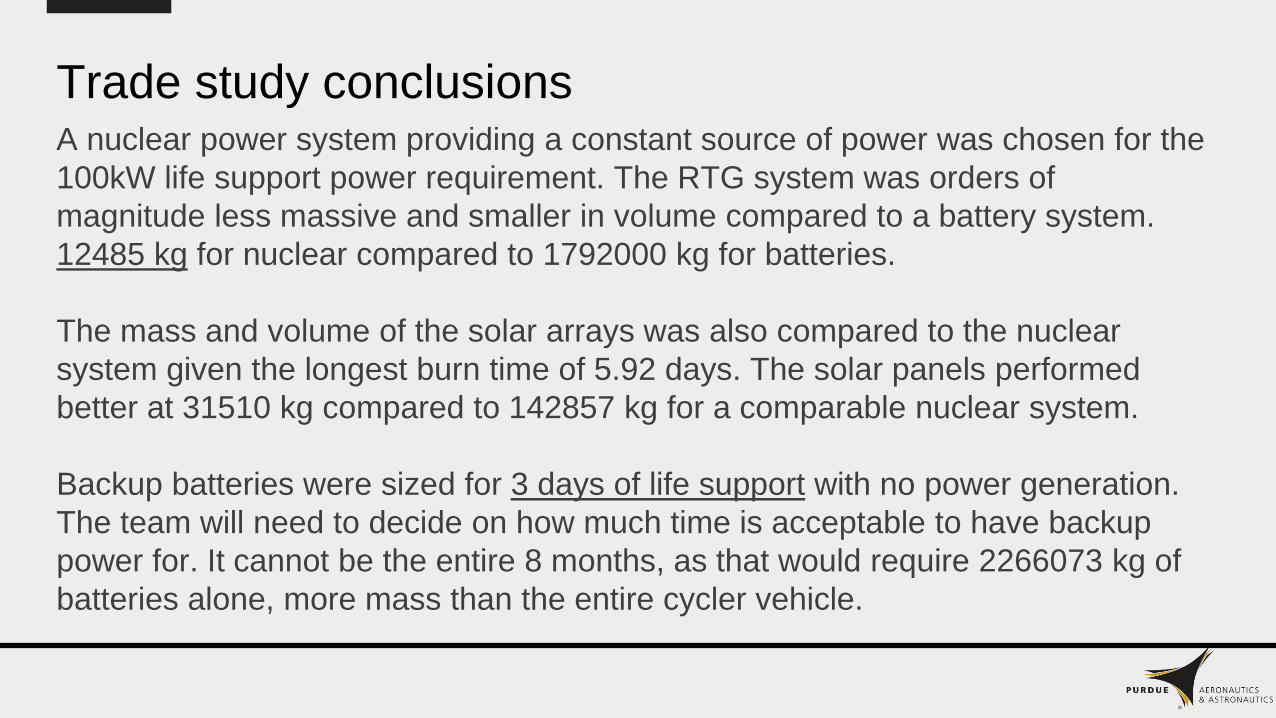
Trade study conclusionsA nuclear power system providing a constant source of power was chosen for the
100kW life support power requirement. The RTG system was orders of
magnitude less massive and smaller in volume compared to a battery system.
12485 kg for nuclear compared to 1792000 kg for batteries.
The mass and volume of the solar arrays was also compared to the nuclear
system given the longest burn time of 5.92 days. The solar panels performed
better at 31510 kg compared to 142857 kg for a comparable nuclear system.
Backup batteries were sized for 3 days of life support with no power generation.
The team will need to decide on how much time is acceptable to have backup
power for. It cannot be the entire 8 months, as that would require 2266073 kg of
batteries alone, more mass than the entire cycler vehicle.

References
[1] Surampudi, S. (2011). Overview of the Space Power Conversion and Energy Storage Technologies.
Jet Propulsion Laboratory, Pasadena.
[2] Beauchamp, P. (2015). Solar Power and Energy Storage for Planetary Missions. Jet Propulsion
Laboratory, Pasadena.
[3] Surampudi, S., et al. (2017). Solar Power Technologies for Future Planetary Science Missions. Jet
Propulsion Laboratory, Pasadena.
[4] Ragheb, M. (2011). RadioIsotopes Power Production. Stanford, CA.

February 20, 2020
Carly Kren – Backup Slides
Propulsion Team
Taxi - Reaction Control Systems (RCS)
Slide: 4 of 25

Derivation of Rocket Equation: Hand calcsSlide: 5 of 25

OMS Configurations NPC1: Hand calcsSlide: 6 of 25
OMS Configurations NPC1: Hand calcs (continued)Slide: 7 of 25

OMS Configurations NPC1: Hand calcs (continued)Slide: 8 of 25

OMS Configurations NPC1: Hand calcs (continued)Slide: 9 of 25
OMS Configurations NPC1: Hand calcs (continued)Slide: 10 of 25

OMS Configurations NPC1: Hand calcs (continued)Slide: 11 of 25
OMS Configurations NPC2: Hand calcsSlide: 12 of 25
OMS Configurations NPC2: Hand calcs (continued)Slide: 13 of 25

OMS Configurations NPC2: Hand calcs (continued)Slide: 14 of 25

OMS Configurations NPC2: Hand calcs (continued)Slide: 15 of 25
Update for Ideal gases: Hand calcsSlide: 16 of 25
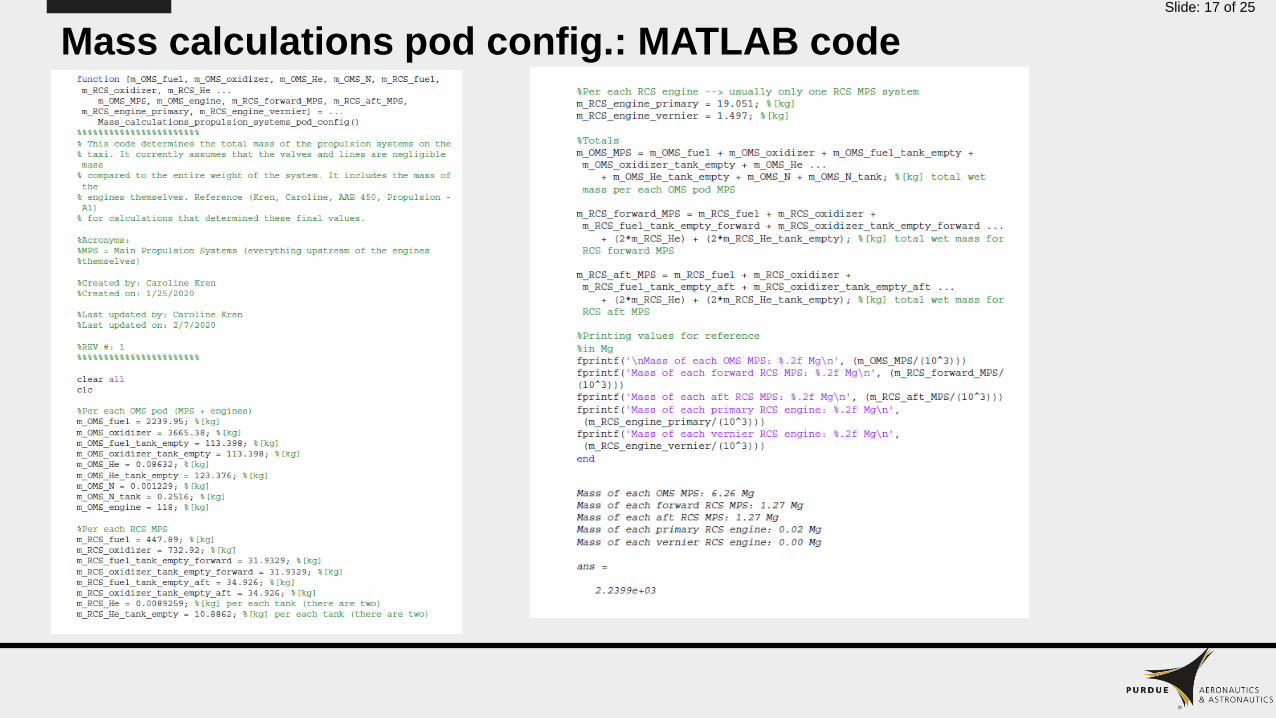
Mass calculations pod config.: MATLAB codeSlide: 17 of 25
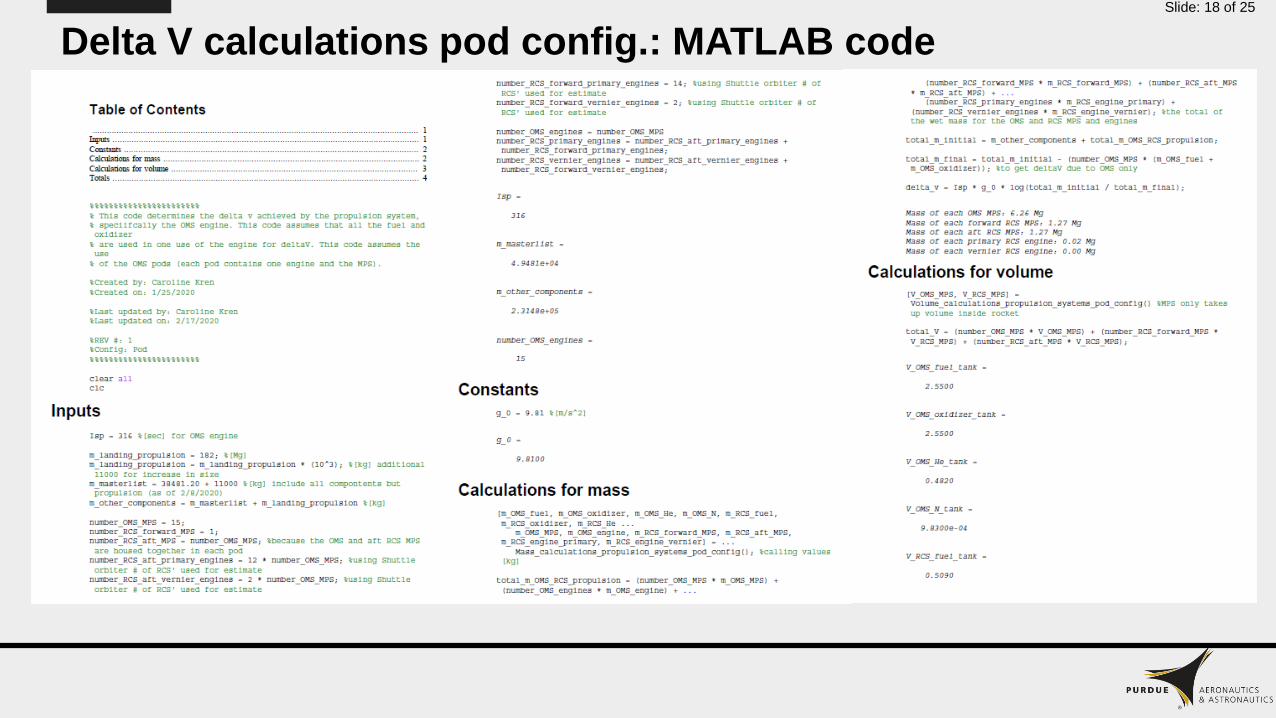
Delta V calculations pod config.: MATLAB codeSlide: 18 of 25
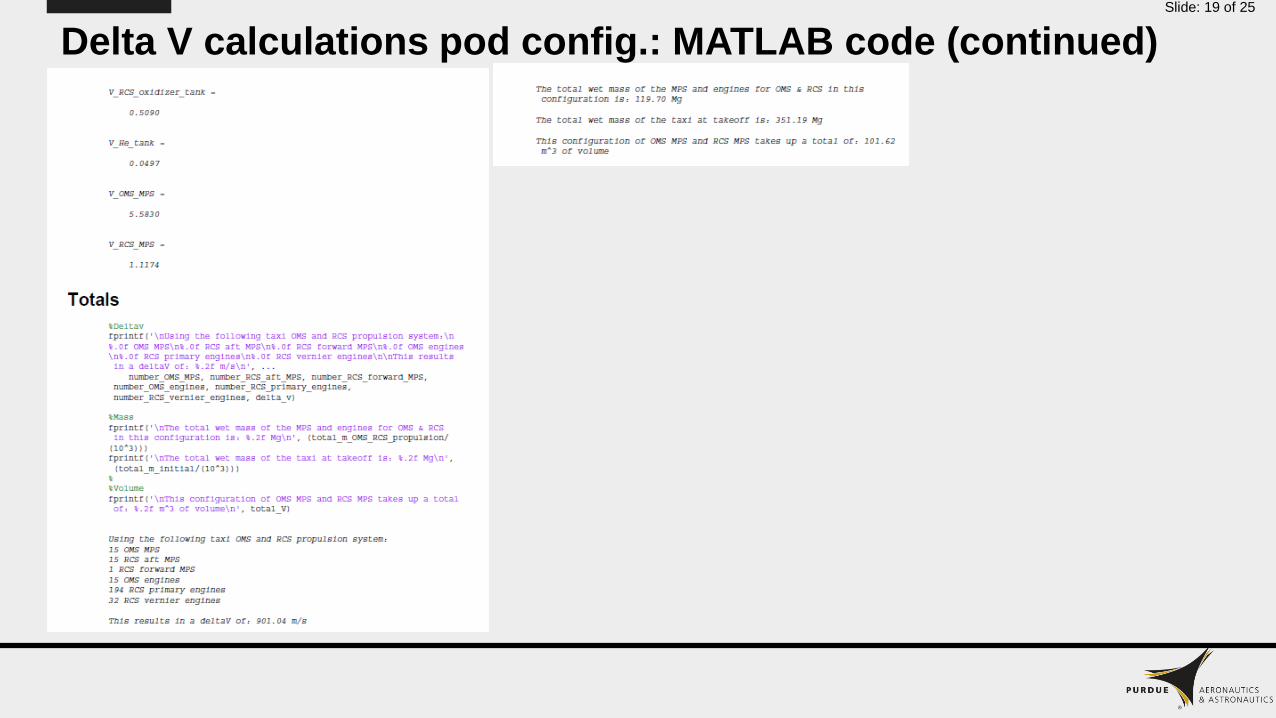
Delta V calculations pod config.: MATLAB code (continued)Slide: 19 of 25

Mass calculations pod config. REV2: MATLAB codeSlide: 20 of 25
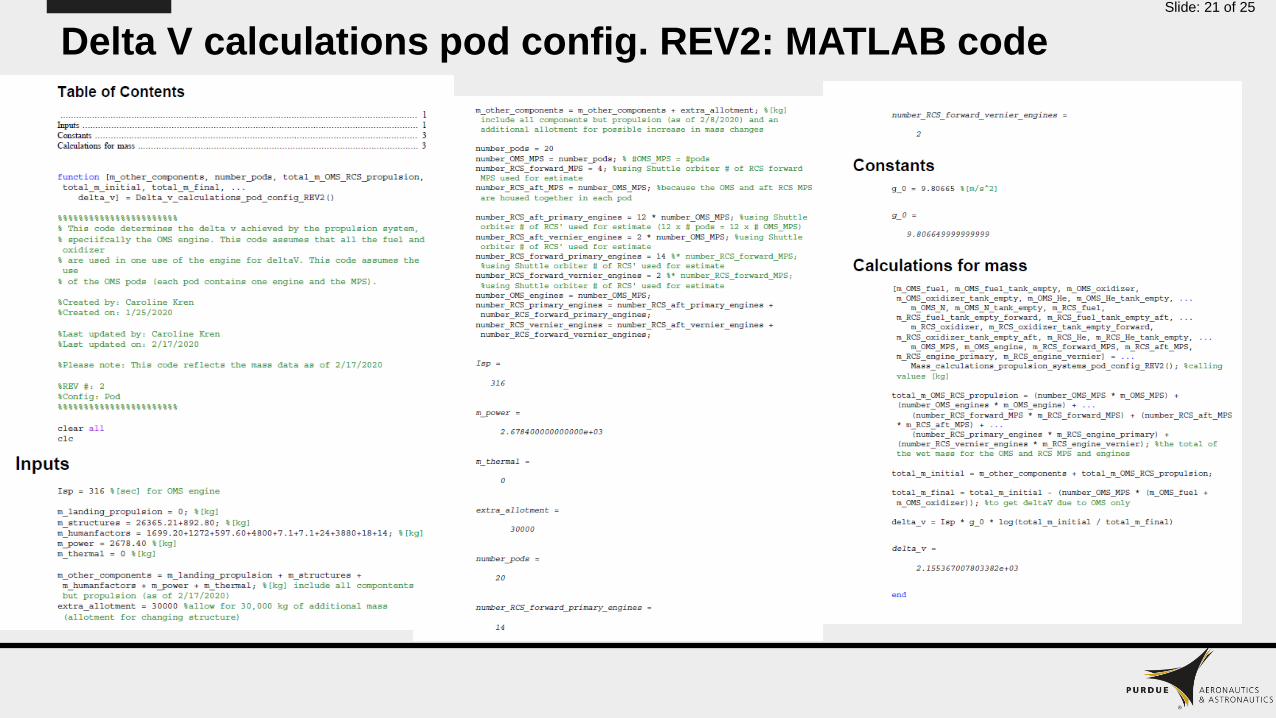
Delta V calculations pod config. REV2: MATLAB codeSlide: 21 of 25
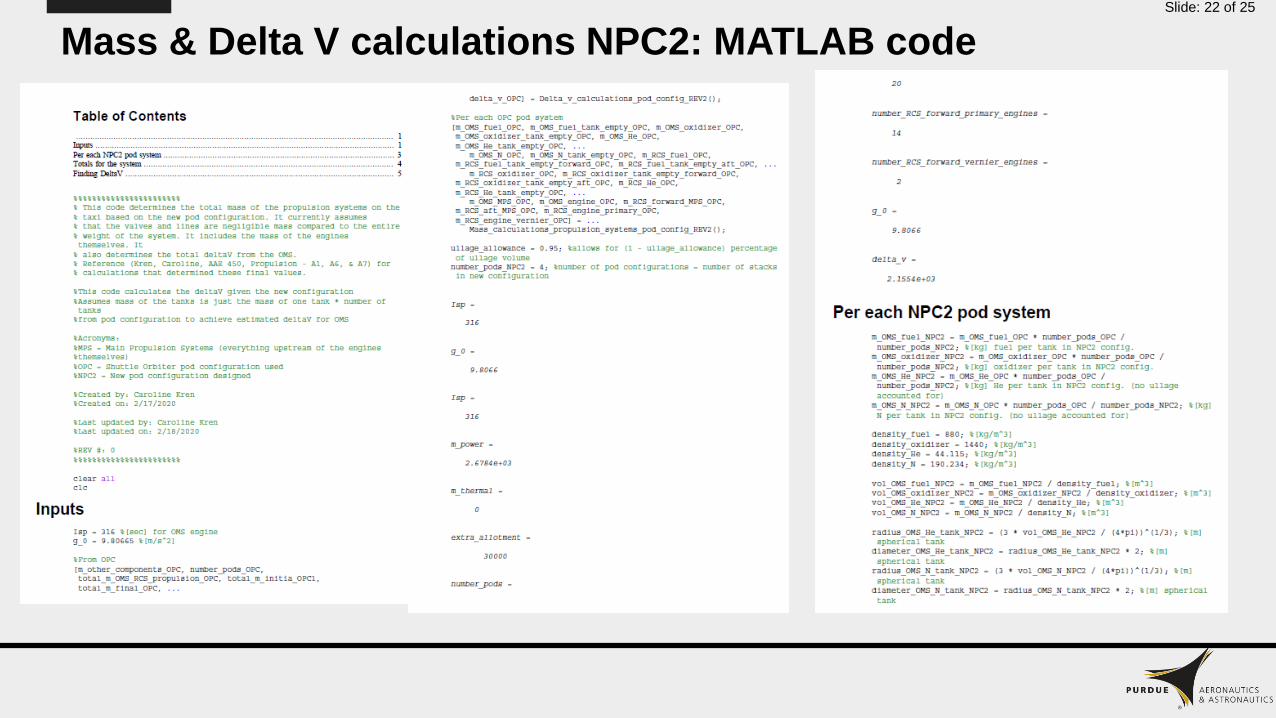
Mass & Delta V calculations NPC2: MATLAB codeSlide: 22 of 25
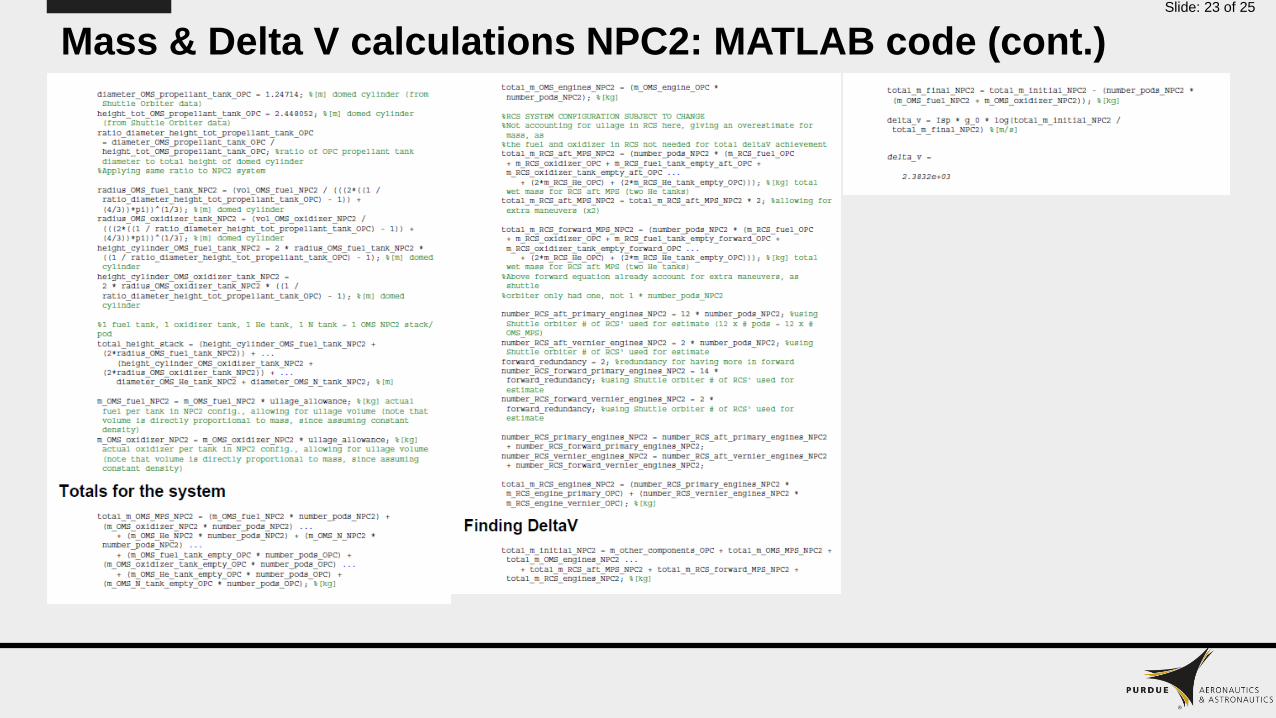
Mass & Delta V calculations NPC2: MATLAB code (cont.)Slide: 23 of 25
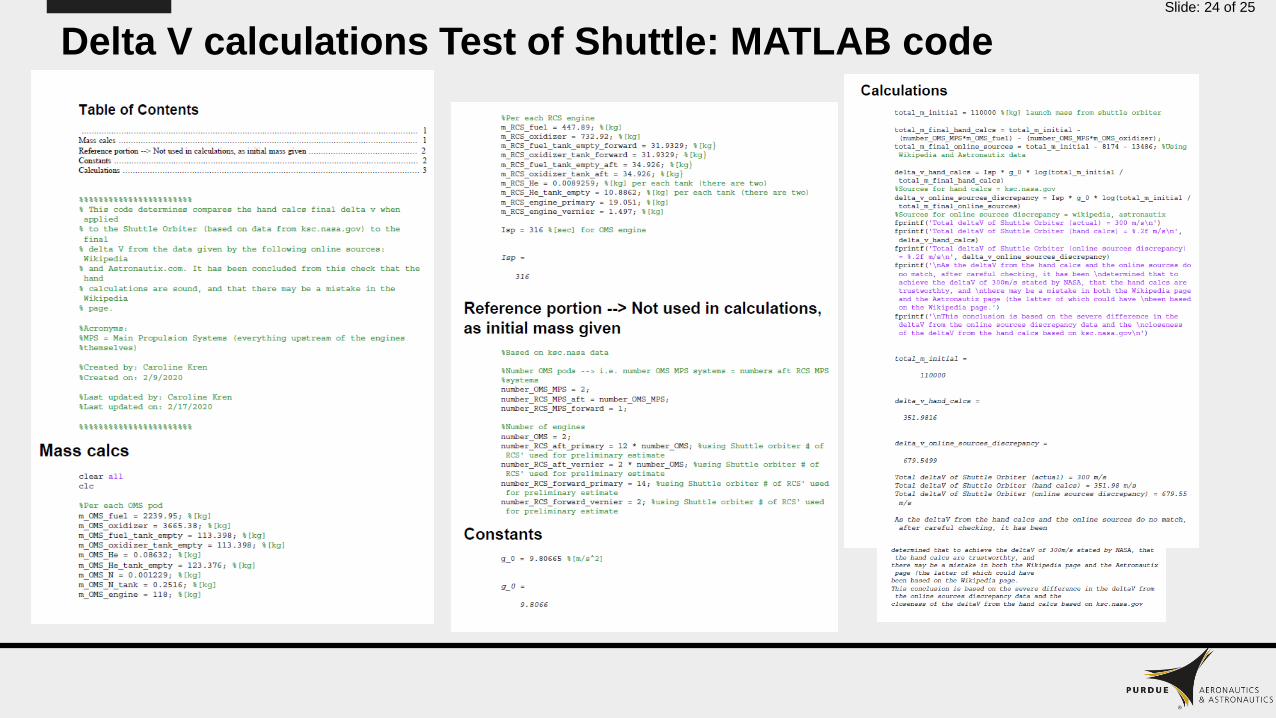
Delta V calculations Test of Shuttle: MATLAB codeSlide: 24 of 25
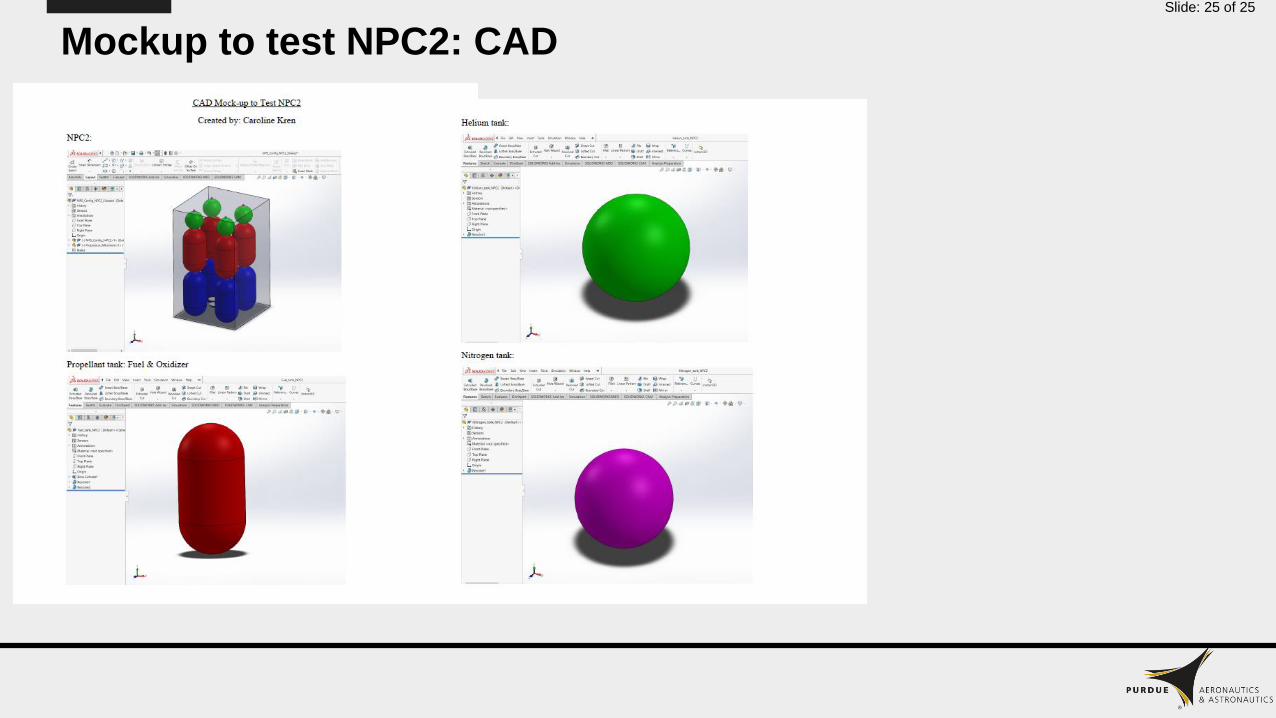
Mockup to test NPC2: CADSlide: 25 of 25

February 20, 2020
Griffin Pfaff – Backup Slides
Propulsion
Cycler - Main Propulsion System
Major Formulas:
𝑀𝑅 = 𝑒(∆𝑉
𝑔∗𝐼𝑠𝑝)
𝑚𝑝𝑟𝑜𝑝𝑒𝑙𝑙𝑎𝑛𝑡 = 𝑀𝑅 ∗ 𝑚𝑐𝑦𝑐𝑙𝑒𝑟 −𝑚𝑐𝑦𝑐𝑙𝑒𝑟

Codecyclermass = 5039; %Mg
taximass = 60; %Mg
totalmass = cyclermass + 3*taximass;
%Mg
forceneed = totalmass * .01; %N
x3mass = .23 %Mg
x3thrust = 5.4; %N
numx3 = 10;
fullthrust = x3thrust * numx3; %N
excessthrust = fullthrust - forceneed
%N
x3power = 100; %kw
fullpower = x3power * numx3 %kw
propflow = 3900; %cm^3/min
isp = 2470;
deltav = 324; %m/s
g = 9.80665; %m/s^2
density = 2.942 %Mg/m^3
mr = exp(deltav/(g*isp));
totalpropmass = mr*totalmass -
totalmass %Mg
totalpropvolume =
totalpropmass/(density) %m^3
systemmass = totalpropmass +
x3mass*numx3 %Mg
isp2 = 450; %liquMid oxygen-liquid
hydrogen
mr2 = exp(deltav/(g*isp2));
totalpropmass2 = mr2*totalmass -
totalmass %Mg
excessthrust =
1.8100
fullpower =
1000
totalpropmass =
70.2785
totalpropvolume =
23.8880
systemmass =
72.5785
totalpropmass2 =
397.5937
Output:

References
[1] Hall, S. J., Jorns, B. A., and Gallimore, A. D., “High-Power
Performance of a 100-kW Class Nested Hall Thruster”, 35th
International Electric Propulsion Conference Georgia Institute
of Technology, Atlanta, GA, 2017.
[2] Lox/LH2 http://www.astronautix.com/l/loxlh2.html [Accessed
19 Feb. 2020]

February 20, 2020
Arch PleumpanyaBackup Slides
Propulsion Team
Mass Driver

Kinematics
- Given escape velocity 𝑉𝑒𝑠𝑐 (5.0 km/s for Mars and 2.5 km/s for Luna)
- Determined acceleration for certain track lengths a =𝑉𝑒𝑠𝑐2
2∆𝑥
- Determined launch duration from ∆𝑡 =𝑉𝑒𝑠𝑐
𝑎
- Given a mass estimate of suspension system required 𝑚𝑠𝑢𝑠𝑝𝑒𝑛𝑠𝑖𝑜𝑛
- Determined force by 𝐹 = 𝑚𝑣𝑒ℎ𝑖𝑐𝑙𝑒 +𝑚𝑠𝑢𝑠𝑝𝑒𝑛𝑠𝑖𝑜𝑛 𝑎
- Determined power by 𝑃 =𝐹∆𝑥
∆𝑡, assuming 50% efficiency

clear
clc
close all
set(0,'DefaultLineLineWidth',1.5);
%
%% Kinematic equations on mass driver
g = 9.81; % Earth's gravitational acceleration [m/s2]
V_esc_mars = 5000; % Mars' escape velocity [m/s]
V_esc_moon = 2500; % Moon's escape velocity [m/s]
x_track_moon = linspace(50000,200000); % possible range of driver
length on the Moon [m]
acc_moon = V_esc_moon^2/2./x_track_moon; % vehicle acceleration on
the Moon [m/s2]
delta_t_moon = V_esc_moon./acc_moon; % launch duration on the Moon
[s]
x_track_mars = linspace(300000,700000); % possible range of driver
length on Mars [m]
acc_mars = V_esc_mars^2/2./x_track_mars; % vehicle acceleration on
Mars [m/s2]
delta_t_mars = V_esc_mars./acc_mars; % launch duration on Mars [s]
%
%% Calculate force required at chose acceleration
m_taxi = 100e3; % estimated vehicle mass [kg]
acc_g_moon = 2; % chosen acceleration limit on the Moon [9.81 m/s2]
F_req_moon = 1.5*m_taxi*acc_g_moon*g; % force required on the Moon
[N]
acc_g_mars = 2; % chosen acceleration limit on Mars [9.81 m/s2]
F_req_mars = 1.5*m_taxi*acc_g_mars*g; % force required on Mars [N]
%

To find the propellant savings, the rocket equation is used:
∆𝑉 = 𝑔0𝐼𝑠𝑝 ln𝑚𝑖𝑛𝑖𝑡𝑖𝑎𝑙
𝑚𝑓𝑖𝑛𝑎𝑙
where propellant mass fraction is 𝜆 =𝑚𝑝𝑟𝑜𝑝𝑒𝑙𝑙𝑎𝑛𝑡
𝑚𝑡𝑜𝑡𝑎𝑙.
Rearranged,
𝑚𝑝𝑟𝑜𝑝𝑒𝑙𝑙𝑎𝑛𝑡 = 𝜆𝑚𝑡𝑎𝑥𝑖
expΔ𝑉𝑔0𝐼𝑠𝑝
− 1
1 − 1 − 𝜆 expΔ𝑉𝑔0𝐼𝑠𝑝
Assuming parameters from the Atlas V where 𝜆 = 0.93 and
𝐼𝑠𝑝 = 338 𝑠.
Calculated using velocities slightly higher than escape

For further technical specification on the maglev system:
- For the propulsion aspect, we are looking at a three-phase,
single-sided, short-primary, linear induction motor.
- For the levitation aspect, we are looking at null-flux coils as
means for electrodynamic suspension.

February 20, 2020
Steven Lach
Structures
Tether Sling, ED Tether, and Mass Drivers
Backup Slides
1

References
3
Taxi Mass: Taxi Masterlist
Aluminum 6061 T6 Properties: ASM Aluminum Data Sheet
http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=
MA6061T6
ΔV: Mission Design Presentations

Tether Calculation Code
3

Concept Development
3
Tether Sling Changes
• 3 Tethers spaced 120 degrees apart.
• Added the gondola system to the requirements which
requires a sheath. This will be in effect on Luna and Mars
• Tethers with sheath will use Zylon fiber instead of Dyneema
fiber due to better tensile strength and mass estimates.
Mass Driver Sled Changes
• The sled will use a Maglev system for propulsion.
• Sled design is heavily dependent on taxi design and mass.
ED Tether
• Electric motor propulsion with electrodynamic orbit
maintenance.

Taxi Connector Design Ideas
3
System that is modeled off of an aircraft carrier arresting wires.
Taxi snags a wire in order to attach to the tether.
Further talks with taxi structures needs to happen in order to
develop the system.
• They have been busy with the taxi redesign

Tether Hub/Torque Arm Design
3
Hub: Large spinning disk to which the torque arms will be
attached to. Material will probably be Aluminum 6061 T6 or
something similar.
Torque Arms: Material will likely be Aluminum 6061 T6. The
cross section design will be analyzed soon.
For tethers with the gondola system, maybe have the torque
arm be hollow and large enough that the people can disembark
the gondola and enter inside the torque arm to make their way
to the central axis of the tether. This would allow them to be
transported down to ground level through the central axis.
This idea is still under consideration and feasibility analysis is
needed.

Mass Driver Sled Design
3
See slide two for diagram of sled. Dimensions are needed
based on the taxi dimensions.
Further Mass Driver structures problems will be passed off to
Erick Smith (CAD) from now on.
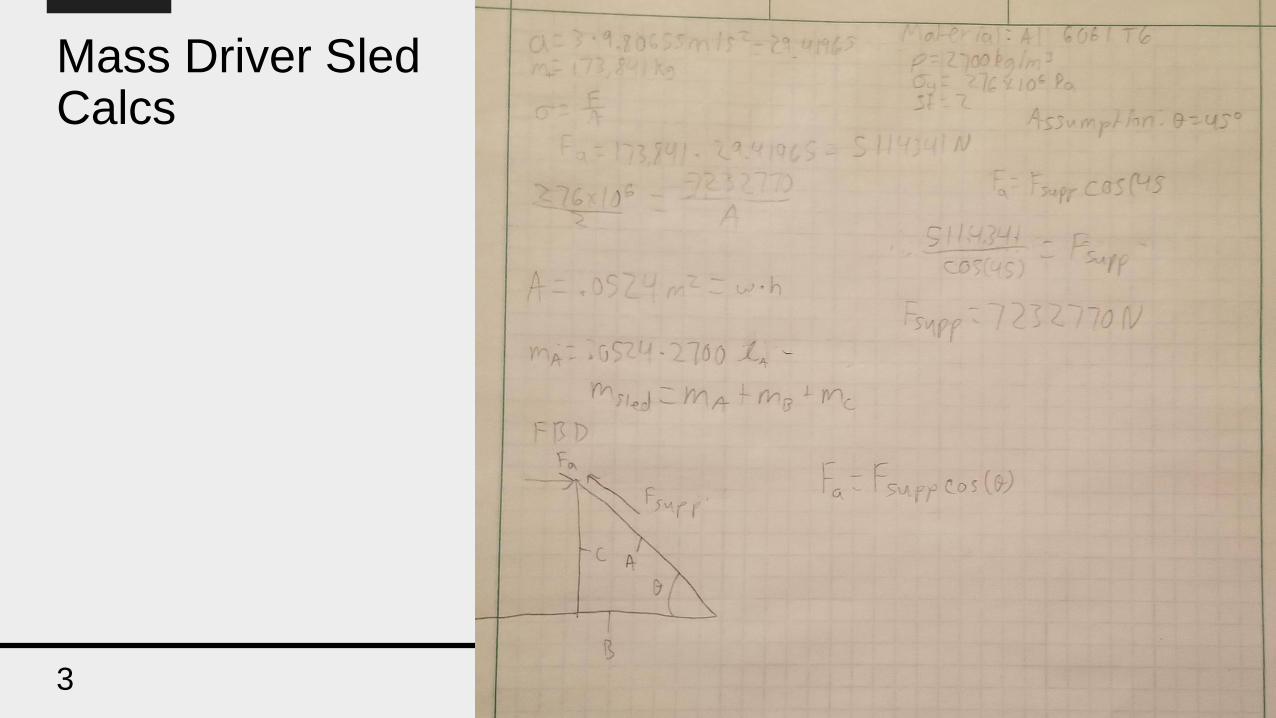
Mass Driver Sled Calcs
3

• Aluminum 7075 – T6 [1]
• Carbon Fiber: HexTow AS4C [3]
Nicki Liu Backup – Material Properties
Mechanical Properties Metric English Comments
Ultimate Tensile Strength >= 572 Mpa >= 83000 psi Wire, rod, bar and shapes
Yield Tensile Strength >= 503 Mpa >= 73000 psi Wire, rod, bar and shapes
Elongation at Break >= 11 % >= 11 % Wire, rod, and bar (rolled or
cold finished)
Modulus of Elasticity 71.7 Gpa 10400 ksi
Fatigue Strength 159 MPa 23000 psi completely reversed stress
Melting Point 477 - 635 °C 890 - 1175 °F
Thermal Conductivity 130 W/m-K 900 BTU-in/hr-ft²-°F
Mechanical Properties Metric English
Bulk Density 1.78 g/cm3 0.0643 lb/in3
Ultimate Tensile Strength 4,654 MPa 675 ksi
Tensile Modulus (Chord 6000-
1000)
231 GPa 33.5 Msi
Weight/Length 0.200 g/m 11.2 x 10-6 lb/in
Approximate Yield 5.00 m/g 7,441 ft/lb
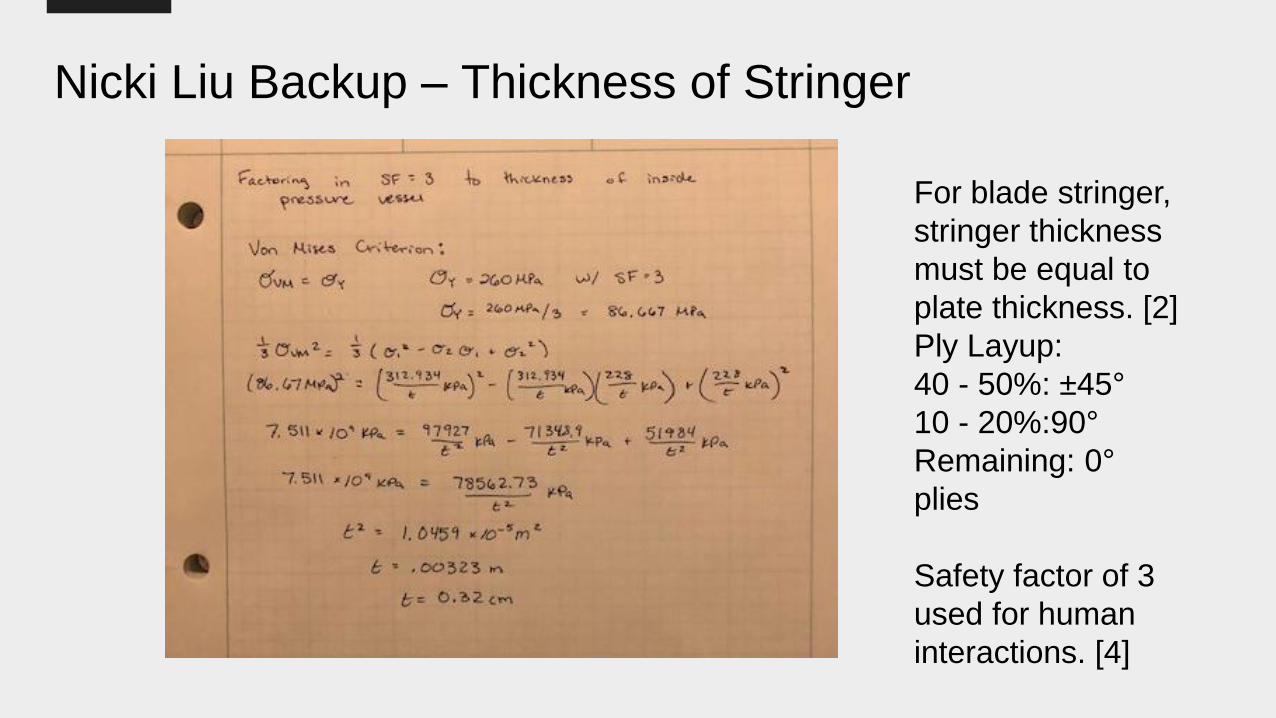
Nicki Liu Backup – Thickness of Stringer
For blade stringer,
stringer thickness
must be equal to
plate thickness. [2]
Ply Layup:
40 - 50%: ±45°
10 - 20%:90°
Remaining: 0°
plies
Safety factor of 3
used for human
interactions. [4]

Nicki Liu Backup – References[1] “Aluminum 7075-T6,” ASM Material Data Sheet Available:
http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=MA7075T6.
[2] Arunkumar, K. N., and Lohith, N., “Effect of Ribs and Stringer Spacings on the Weight of Aircraft
Structure for Aluminum Material,” ARPN Journal of Engineering and Applied Sciences, vol. 12, Jan. 2012,
pp. 1006–1012.
[3] “HexTow® AS4C Carbon Fiber,” Hexcel Available:
https://www.hexcel.com/Resources/DataSheets/Carbon-Fiber.
[4] Japan Aerospace Exploration Agency, “Technical Standard for High Pressure Gas Equipment for Space
Use,” JAXA, vol. JERG-0-001D, Mar. 2016.
[5] Imran, M., Shi, D., Tong, L., and Waqas, H. M., “Design optimization of composite submerged cylindrical
pressure hull using genetic algorithm and finite element analysis,” Ocean Engineering Available:
https://www.sciencedirect.com/science/article/pii/S0029801819305918#bib23.








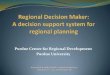

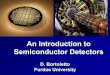



![Purdue University - GROUP 2 PRESENTATIONS › AAECourses › aae450 › 2018 › ...2018/02/27 · • Meteorites populate the surface of Mars [1] • Minimal weathering on surface](https://img.pdfslide.us/doc/110x75/5f1a75c0dcca3009194aefd3/purdue-university-group-2-presentations-a-aaecourses-a-aae450-a-2018-a.jpg)



![An Introduction to Beamer - University of Pennsylvania · For medium to long presentations create sections \section[ ]{ } For long presentations create subsections \subsection[ ]{](https://img.pdfslide.us/doc/110x75/5e7812cc61e0680c241de4a2/an-introduction-to-beamer-university-of-pennsylvania-for-medium-to-long-presentations.jpg)










