Embed Size (px)
Citation preview

Scalable Algorithms for Optimal Control ofSystems Governed by PDEs Under Uncertainty
Alen Alexanderian1, Omar Ghattas2, Noemi Petra3, Georg Stadler4
1Department of MathematicsNorth Carolina State University
2Institute for Computational Engineering and SciencesThe University of Texas at Austin
3School of Natural SciencesUniversity of California, Merced
3Courant Institute of Mathematical SciencesNew York University
Advances in Uncertainty Quantification Methods, Algorithms and ApplicationsAnnual Meeting of KAUST SRI-UQ Center
King Abdullah University of Science and Technology, Saudi ArabiaJanuary 5–10, 2016

From data to decisions under uncertainty
Uncertain parameter m
Bayesian inversionπpost(m|y)∝ πlike(y|m)π0(m)
Experimental data y
Mathematical Model
A(m,u) = f
Design of experiments
minξ
∫Ψ[πpost(m|y; ξ)
]π(y)dy
ξ : experimental designΨ: design objective/criterion
Quantity of Interest (QoI)q(m)
Optimal control/designunder uncertainty
e.g. minz
∫q(z,m)µ(dm)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 2 / 23

From data to decisions under uncertainty
Uncertain parameter m
Bayesian inversionπpost(m|y)∝ πlike(y|m)π0(m)
Experimental data y
Mathematical Model
A(m,u) = f
Design of experiments
minξ
∫Ψ[πpost(m|y; ξ)
]π(y)dy
ξ : experimental designΨ: design objective/criterion
Quantity of Interest (QoI)q(m)
Optimal control/designunder uncertainty
e.g. minz
∫q(z,m)µ(dm)
posterior
prior
πlike(y|m)=πnoise(Bu− y)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 2 / 23

From data to decisions under uncertainty
Uncertain parameter m
Bayesian inversionπpost(m|y)∝ πlike(y|m)π0(m)
Experimental data y
Mathematical Model
A(m,u) = f
Design of experiments
minξ
∫Ψ[πpost(m|y; ξ)
]π(y)dy
ξ : experimental designΨ: design objective/criterion
Quantity of Interest (QoI)q(m)
Optimal control/designunder uncertainty
e.g. minz
∫q(z,m)µ(dm)
posterior
prior
experiments
πlike(y|m)=πnoise(Bu− y)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 2 / 23

From data to decisions under uncertainty
Uncertain parameter m
Bayesian inversionπpost(m|y)∝ πlike(y|m)π0(m)
Experimental data y
Mathematical Model
A(m,u) = f(·; z)z := control function
Design of experiments
minξ
∫Ψ[πpost(m|y; ξ)
]π(y)dy
ξ : experimental designΨ: design objective/criterion
Quantity of Interest (QoI)q(z,m)
Optimal control/designunder uncertainty
e.g. minz
∫q(z,m)µ(dm)
posterior
prior
experiments
πlike(y|m)=πnoise(Bu− y)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 2 / 23

Example: Groundwater contaminant remediation
Source: Reed Maxwell, CSM
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 3 / 23

Example: Groundwater contaminant remediation
Inverse problem
Infer (uncertain) soil permeability from (uncertain) measurements of pressurehead at wells and from a (uncertain) model of subsurface flow and transport
Prediction (or forward) problem
Predict (uncertain) evolution of contaminant concentration at municipal wellsfrom (uncertain) permeability and (uncertain) subsurface flow/transport model
Optimal experimental design problem
Where should new observation wells be placed so that permeability is inferredwith the least uncertainty?
Optimal design problem
Where should new remediation wells be placed so that (uncertain)contaminant concentrations at municipal wells are minimized?
Optimal control problem
What should the rates of extraction/injection at remediation wells be so that(uncertain) contaminant concentrations at municipal wells are minimized?
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 4 / 23

Optimal control of systems governed by PDEs withuncertain parameter fields
PDE-constrained control objective
q = q(u(z,m))
where
A(u,m) = f(z)
q: control objective
A: forward operator
m: uncertain parameter field
z: control function
Control of injection wells in porousmedium flow (SPE10 permeability data)
Problem: given the uncertainty model for m, find z that “optimizes” q(u(z,m))
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 5 / 23

Optimization under uncertainty (OUU)
H : parameter space, infinite-dimensional separable Hilbert space
q(z,m): control objective functional
m ∈H : uncertain model parameter field, z: control function
Optimization under uncertainty (OUU):
minz
Em{
q(z,m)
}+ β varm{q(z,m)}
Em{q(z,m)} =
∫H
q(z,m)µ(dm)
varm{q(z,m)} = Em{q(z,m)2} − Em{q(z,m)}2
Main challenges:
Integration over infinite/high-dimensional parameter spaceEvaluation of q requires PDE solves
Standard Monte Carlo approach (Sample Average Approximation) isprohibitive
Numerous (nmc) samples required, each requires PDE solveResulting PDE-constrained optimization problem has nmc PDE constraints
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 6 / 23

Optimization under uncertainty (OUU)
H : parameter space, infinite-dimensional separable Hilbert space
q(z,m): control objective functional
m ∈H : uncertain model parameter field, z: control function
Risk-neutral optimization under uncertainty (OUU):
minz
Em{q(z,m)}
+ β varm{q(z,m)}
Em{q(z,m)} =
∫H
q(z,m)µ(dm)
varm{q(z,m)} = Em{q(z,m)2} − Em{q(z,m)}2
Main challenges:
Integration over infinite/high-dimensional parameter spaceEvaluation of q requires PDE solves
Standard Monte Carlo approach (Sample Average Approximation) isprohibitive
Numerous (nmc) samples required, each requires PDE solveResulting PDE-constrained optimization problem has nmc PDE constraints
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 6 / 23

Optimization under uncertainty (OUU)
H : parameter space, infinite-dimensional separable Hilbert space
q(z,m): control objective functional
m ∈H : uncertain model parameter field, z: control function
Risk-averse optimization under uncertainty (OUU):
minz
Em{q(z,m)}+ β varm{q(z,m)}
Em{q(z,m)} =
∫H
q(z,m)µ(dm)
varm{q(z,m)} = Em{q(z,m)2} − Em{q(z,m)}2
Main challenges:
Integration over infinite/high-dimensional parameter spaceEvaluation of q requires PDE solves
Standard Monte Carlo approach (Sample Average Approximation) isprohibitive
Numerous (nmc) samples required, each requires PDE solveResulting PDE-constrained optimization problem has nmc PDE constraints
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 6 / 23

Optimization under uncertainty (OUU)
H : parameter space, infinite-dimensional separable Hilbert space
q(z,m): control objective functional
m ∈H : uncertain model parameter field, z: control function
Risk-averse optimization under uncertainty (OUU):
minz
Em{q(z,m)}+ β varm{q(z,m)}
Em{q(z,m)} =
∫H
q(z,m)µ(dm)
varm{q(z,m)} = Em{q(z,m)2} − Em{q(z,m)}2
Main challenges:
Integration over infinite/high-dimensional parameter spaceEvaluation of q requires PDE solves
Standard Monte Carlo approach (Sample Average Approximation) isprohibitive
Numerous (nmc) samples required, each requires PDE solveResulting PDE-constrained optimization problem has nmc PDE constraints
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 6 / 23

Some existing approaches for PDE-constrained OUU
Methods based on stochastic collocation, sparse/adaptive sampling, POD, ...Schulz & Schillings, Problem formulations and treatment of uncertainties in aerodynamic design, AIAAJ, 2009.Borzı & von Winckel, Multigrid methods and sparse-grid collocation techniques for parabolic optimalcontrol problems with random coefficients, SISC, 2009.Borzı, Schillings, & von Winckel, On the treatment of distributed uncertainties in PDE-constrainedoptimization, GAMM-Mitt. 2010.Borzı & von Winckel, A POD framework to determine robust controls in PDE optimization, Computingand Visualization in Science, 2011.Gunzburger & Ming, Optimal control of stochastic flow over a backward-facing step using reduced-ordermodeling, SISC 2011.Gunzburger, Lee, & Lee, Error estimates of stochastic optimal Neumann boundary control problems,SINUM, 2011.Kunoth & Schwab, Analytic Regularity and GPC Approximation for Control Problems Constrained byLinear Parametric Elliptic and Parabolic PDEs, SICON, 2013.Tiesler, Kirby, Xiu, & Preusser, Stochastic collocation for optimal control problems with stochastic PDEconstraints, SICON, 2012.Kouri, Heinkenschloss, Ridzal, & Van Bloemen Waanders, A trust-region algorithm with adaptivestochastic collocation for PDE optimization under uncertainty, SISC, 2013.Chen, Quarteroni, & Rozza, Stochastic optimal Robin boundary control problems ofadvection-dominated elliptic equations, SINUM, 2013.Kouri, A multilevel stochastic collocation algorithm for optimization of PDEs with uncertain coefficients,JUQ, 2014.Chen & Quarteroni, Weighted reduced basis method for stochastic optimal control problems with ellipticPDE constraint, JUQ, 2014.Chen, Quarteroni, & Rozza, Multilevel and weighted reduced basis method for stochastic optimalcontrol problems constrained by Stokes equations, Num. Math. 2015.
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 7 / 23

Control of injection wells in a porous medium flow
1
2
3
4
m = mean of log permeability field q = target pressure at production wells
state PDE: single phase flow in a porous medium
−∇ · (em∇u) =
nc∑i=1
zifi(x)
with Dirchlet lateral & Neumann top/bottom BCs
uncertain parameter: log permeability field m:
control variables: zi, mass source at injection wells; fi, mollified Dirac deltas
control objective: q(z,m) := 12‖Qu(z,m)− q‖2, q: target pressure
dimensions: ns = nm = 3242, nc = 20, nq = 12
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 8 / 23

Porous medium with random permeability field
Distribution law of m:
µ = N (m, C) (Gaussian measure on Hilbert space H )
Take covariance operator as square of inverse of Poisson-like operator:
C = (−κ∆ + αI)−2 κ, α > 0
C is positive, self-adjoint, of trace-class; µ well-defined on H (Stuart ’10)κα ∝ correlation length; the larger α, the smaller the variance
Random draws for κ = 2× 10−2, α = 4
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 9 / 23

OUU with linearized parameter-to-objective map
Risk-averse optimal control problem (including cost of controls)
minz
Em{q(z,m)}+ β varm{q(z,m)}+ γ ‖z‖2
Linear approximation to parameter-to-objective map
qlin(z,m) = q(z, m) + 〈gm(z, m),m− m〉
gm(z, ·) :=dq(z, ·)dm
is the gradient with respect to m
The moments of the linearized objective:
Em{qlin(z, ·)} = q(z, m),
varm{qlin(z, ·)} = 〈gm(z, m), C[gm(z, m)]〉
qlin(z, ·) ∼ N(q(z, m), 〈gm(z, m), C[gm(z, m)]〉
)Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 10 / 23

Risk-averse optimal control problem with linearizedparameter-to-objective map
State-and-adjoint-PDE constrained optimization problem (quartic in z):
minz∈ZJ (z) :=
1
2‖Qu− q‖2 +
β
2〈gm(m), C[gm(m)]〉+
γ
2‖z‖2
with gm(m) =em∇u · ∇p, where
−∇ · (em∇u) =
nc∑i=1
zifi state equation
−∇ · (em∇p) = −Q∗(Qu− q) adjoint equation
Lagrangian of the risk-averse optimal control problem with qlin:
L (z, u, p, u?, p?) =1
2‖Qu− q‖2 +
β
2
⟨em∇u · ∇p, C[em∇u · ∇p]
⟩+γ
2‖z‖2
+⟨em∇u,∇u?⟩− nc∑
i=1
zi〈fi, u?〉
+⟨em∇p,∇p?
⟩+ 〈Q∗(Qu− q), p?〉
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 11 / 23

Gradient computation for risk averse optimal control
“State problem” for risk-averse optimal control problem with qlin:
⟨em∇u,∇u
⟩=
nc∑i=1
zi〈fi, u〉⟨em∇p,∇p
⟩= −〈Q∗(Qu− q), p〉
for all test functions p and u
“Adjoint problem” for risk-averse optimal control problem with qlin:
⟨em∇p?,∇p
⟩= −β
⟨em∇u · ∇p, C[em∇u · ∇p]
⟩⟨em∇u?,∇u
⟩= −〈Q∗(Qu− q), u〉 − β
⟨em∇u · ∇p, C[em∇u · ∇p]
⟩− 〈Q∗Qp?, u〉
for all test functions p and u
Gradient:∂J∂zj
= γzj − 〈fj , u?〉, j = 1, . . . , nc
Cost of objective = 2 PDE solves; cost of gradient = 2 PDE solves
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 12 / 23

Risk-averse optimal control with linearized objective
−20 0 20 40 60 80 100 120 1400
0.01
0.02
0.03
0.04
dis
trib
uti
on
Θ(z0, ·)Θlin(z0, ·)Θquad(z0, ·)
initial (suboptimal) control z0 distrib. of exact & approx objectives at z0
0 2 4 6 8 10 12 14 160
1
2
3
4
5
dis
trib
uti
on
Θ(zoptlin , ·)
Θlin(zoptlin , ·)
Θquad(zoptlin , ·)
optimal control zoptlin based on qlin distrib. of exact & approx objectives at zopt
lin
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 13 / 23

Risk-averse optimal control with linearized objective
−20 0 20 40 60 80 100 120 1400
0.01
0.02
0.03
0.04
dis
trib
uti
on
Θ(z0, ·)Θlin(z0, ·)Θquad(z0, ·)
initial (suboptimal) control z0 distrib. of exact & approx objectives at z0
0 2 4 6 8 10 12 14 160
1
2
3
4
5
dis
trib
uti
on
Θ(zoptlin , ·)
Θlin(zoptlin , ·)
Θquad(zoptlin , ·)
optimal control zoptlin based on qlin distrib. of exact & approx objectives at zopt
lin
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 13 / 23

Quadratic approximation to parameter-to-objective map
Quadratic approximation to the parameter-to-control-objective map:
qquad(z,m) = q(z, m) + 〈gm(z, m),m− m〉+1
2〈Hm(z, m)(m− m),m− m〉
gm: gradient of parameter-to-objective map
Hm: Hessian of parameter-to-objective map
Observations:
Quadratic approximation does not lead to a Gaussian control objective
However, can derive analytic formulas for the moments of qquad in theinfinite-dimensional Hilbert space setting
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 14 / 23

Analytic expressions for mean and variance with qquad
Mean:
Em{qquad(z, ·)} = q(z, m)+1
2tr[Hm(z, m)
]Variance:
varm{qquad(z, ·)} = 〈gm(z, m), C[gm(z, m)]〉+1
2tr[Hm(z, m)2
]where Hm = C1/2HmC1/2 is the covariance-preconditioned Hessian
Risk averse optimal control objective with qquad:
J(z) = q(z, m) +1
2tr[Hm(z, m)
]+β
2
{〈gm(z, m), C[gm(z, m)]〉+
1
2tr[Hm(z, m)2
]}
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 15 / 23

Randomized trace estimator
Randomized trace estimation:
tr(Hm) ≈ 1
ntr
ntr∑j=1
⟨Hmξj , ξj
⟩=
1
ntr
ntr∑j=1
〈Hmζj , ζj〉
tr(H2m) ≈ 1
ntr
ntr∑j=1
〈Hmζj , C[Hmζj ]〉
where ζj = C1/2ξj
In computations, we use draws ζj ∼ N (0, C) =: ν
Straightforward to show:∫H
〈Hmζ, ζ〉 ν(dζ) = tr(Hm),
∫H
〈Hmζ, C[Hmζ]〉 ν(dζ) = tr(H2m)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 16 / 23

Risk-averse optimal control with quadraticized objective
minz∈Z
1
2‖Qu− q‖22+
1
2ntr
ntr∑j=1
〈ζj , ηj〉+β
2
{〈gm(m), C[gm(m)]〉+ 1
2ntr
ntr∑j=1
∥∥C1/2ηj∥∥2}
with
gm(m) =em∇u · ∇pηj = em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)︸ ︷︷ ︸
Hmζj
j ∈ {1, . . . , ntr}
where
−∇ · (em∇u) =∑Ni=1 zifi
−∇ · (em∇p) = −Q∗(Qu− q)−∇ · (em∇υj) = ∇ · (ζjem∇u)
−∇ · (em∇ρj) = −Q∗Qυj +∇ · (ζjem∇p)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 17 / 23

Risk-averse optimal control with quadraticized objective
minz∈Z
1
2‖Qu− q‖22+
1
2ntr
ntr∑j=1
〈ζj , ηj〉+β
2
{〈gm(m), C[gm(m)]〉+ 1
2ntr
ntr∑j=1
∥∥C1/2ηj∥∥2}
with
gm(m) =em∇u · ∇pηj = em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)︸ ︷︷ ︸
Hmζj
j ∈ {1, . . . , ntr}
where
−∇ · (em∇u) =∑Ni=1 zifi
−∇ · (em∇p) = −Q∗(Qu− q)−∇ · (em∇υj) = ∇ · (ζjem∇u)
−∇ · (em∇ρj) = −Q∗Qυj +∇ · (ζjem∇p)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 17 / 23

Risk-averse optimal control with quadraticized objective
minz∈Z
1
2‖Qu− q‖22+
1
2ntr
ntr∑j=1
〈ζj , ηj〉+β
2
{〈gm(m), C[gm(m)]〉+ 1
2ntr
ntr∑j=1
∥∥C1/2ηj∥∥2}
with
gm(m) =em∇u · ∇pηj = em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)︸ ︷︷ ︸
Hmζj
j ∈ {1, . . . , ntr}
where
−∇ · (em∇u) =∑Ni=1 zifi
−∇ · (em∇p) = −Q∗(Qu− q)−∇ · (em∇υj) = ∇ · (ζjem∇u)
−∇ · (em∇ρj) = −Q∗Qυj +∇ · (ζjem∇p)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 17 / 23

Risk-averse optimal control with quadraticized objective
minz∈Z
1
2‖Qu− q‖22+
1
2ntr
ntr∑j=1
〈ζj , ηj〉+β
2
{〈gm(m), C[gm(m)]〉+ 1
2ntr
ntr∑j=1
∥∥C1/2ηj∥∥2}
with
gm(m) =em∇u · ∇pηj = em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)︸ ︷︷ ︸
Hmζj
j ∈ {1, . . . , ntr}
where
−∇ · (em∇u) =∑Ni=1 zifi
−∇ · (em∇p) = −Q∗(Qu− q)−∇ · (em∇υj) = ∇ · (ζjem∇u)
−∇ · (em∇ρj) = −Q∗Qυj +∇ · (ζjem∇p)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 17 / 23

Risk-averse optimal control with quadraticized objective
minz∈Z
1
2‖Qu− q‖22+
1
2ntr
ntr∑j=1
〈ζj , ηj〉+β
2
{〈gm(m), C[gm(m)]〉+ 1
2ntr
ntr∑j=1
∥∥C1/2ηj∥∥2}
with
gm(m) =em∇u · ∇pηj = em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)︸ ︷︷ ︸
Hmζj
j ∈ {1, . . . , ntr}
where
−∇ · (em∇u) =∑Ni=1 zifi
−∇ · (em∇p) = −Q∗(Qu− q)−∇ · (em∇υj) = ∇ · (ζjem∇u)
−∇ · (em∇ρj) = −Q∗Qυj +∇ · (ζjem∇p)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 17 / 23

Lagrangian for risk-averse optimal control with qquad
L (z, u, p,{υj}ntrj=1, {ρj}ntr
j=1, u?, p?, {υ?
j}ntrj=1, {ρ
?j}ntr
j=1)
=1
2‖Qu− q‖22
+1
2ntr
ntr∑j=1
⟨ζj ,[em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)
]⟩+β
2
⟨em∇u · ∇p, C[em∇u · ∇p]
⟩+
β
4ntr
ntr∑j=1
∥∥∥C1/2 [em(ζj∇u · ∇p+∇υj · ∇p+∇u · ∇ρj)]∥∥∥2
+⟨em∇u,∇u?⟩−∑N
i=1 zi〈fi, u?〉
+⟨em∇p,∇p?
⟩+ 〈Q∗(Qu− q), p?〉
+
ntr∑j=1
[⟨em∇υj ,∇υ?
j
⟩+⟨ζje
m∇u,∇υ?j
⟩]+
ntr∑j=1
[⟨em∇ρj ,∇ρ?
j
⟩+⟨Q∗Qυj , ρ
?j
⟩+⟨ζje
m∇p,∇ρ?j
⟩]Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 18 / 23

Adjoint & gradient for risk-averse optimal control w/qquad
Adjoint problem for qquad approximation
−∇ · (em∇ρ?j ) = b(j)1 j ∈ {1, . . . , ntr}
− ∇ · (em∇υ?j ) +Q∗Qρ?j = b(j)2 j ∈ {1, . . . , ntr}
− ∇ · (em∇p?)−ntr∑j=1
∇ · (ζjem∇ρ?j ) = b3
−∇ · (em∇u?) +Q∗Qp? −ntr∑j=1
∇ · (ζjem∇υ?j ) = b4
Gradient for qquad approximation
∂L
∂zj= γzj − 〈fj , u?〉, j = 1, . . . , nc
Cost of objective = 2 + 2ntr PDE solves; cost of gradient = 2 + 2ntr PDE solves
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 19 / 23

Risk-averse optimal control with quadraticized objective
−20 0 20 40 60 80 100 120 1400
0.01
0.02
0.03
0.04
dis
trib
uti
on
Θ(z0, ·)Θlin(z0, ·)Θquad(z0, ·)
initial (suboptimal) control z0 distrib. of exact & approx objectives at z0
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
dis
trib
uti
on
Θ(zoptquad, ·)
Θquad(zoptquad, ·)
optimal control zoptquad based on qquad distrib. of exact & approx objectives at zopt
quad
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 20 / 23

Risk-averse optimal control with quadraticized objective
−20 0 20 40 60 80 100 120 1400
0.01
0.02
0.03
0.04
dis
trib
uti
on
Θ(z0, ·)Θlin(z0, ·)Θquad(z0, ·)
initial (suboptimal) control z0 distrib. of exact & approx objectives at z0
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
dis
trib
uti
on
Θ(zoptquad, ·)
Θquad(zoptquad, ·)
optimal control zoptquad based on qquad distrib. of exact & approx objectives at zopt
quad
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 20 / 23

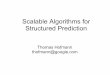
Effect of number of trace estimator vectors on distributionof control objective evaluated at optimal controls
0 1 2 3 4 5 6 7 80
0.2
0.4
value of control objective
distribution
ntr = 5ntr = 20ntr = 40ntr = 60
Optimal controls zoptquad computed for each value of trace estimator using quadratic
approximation of control objective, qquad
Each curve based on 10,000 samples of distribution of q(zoptquad,m)
(control objective evaluated at optimal control)
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 21 / 23

Comparison of distribution of control objective for optimalcontrols based on linearized and quadraticized objective
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
value of control objective
dis
trib
uti
on
Θ(zoptquad, ·)
Θ(zoptlin , ·)
1000 5000 100001
2
3
4
5
sample size
sample
mean
1000 5000 10000
5
10
15
sample size
sample
variance
Comparison of the distributions of q(zoptlin ,m) with q(zopt
quad,m)
β = 1, γ = 10−5 and ntr = 40 trace estimation vectors
KDE results are based on 10,000 samples
Inserts show Monte Carlo sample convergence for mean and variance
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 22 / 23

Summary
Some concluding remarks:
Optimal control of PDEs with infinite-dimensional parameters
Use of local approximations to parameter-to-objective map
Quadratic approximation is effective in capturing the distribution of thecontrol objective for the target problem
Computational complexity of objective & gradient evaluation is independentof problem dimension (nm = 3242)
objective + gradient cost = ∼125 PDE solvesobjective/gradient cost for Monte Carlo/SAA: ∼10,000 PDE solvesdifferences even more striking for nonlinear PDE state problems
Possible extensions:
Higher moments (e.g., for forward UQ)
Alternative risk measures
Higher order approximations, e.g., third order Taylor expansion with propertensor contraction of third order derivative tensor
Omar Ghattas (ICES, UT Austin) Optimal control under uncertainty UQAW 2016 23 / 23
A. Alexanderian, N. Petra, G. Stadler, and O. Ghattas, Mean-variance risk-averse optimal control of systemsgoverned by PDEs with random coefficient fields using second order approximations, in submission.