-
RESEARCH ARTICLE
Computer models offer new insights into the mechanics of
rockclimbing
SHAWN D. RUSSELL1, CHRISTOPHER A. ZIRKER1, & SILVIA S.
BLEMKER1,2,3,4
1Department of Mechanical & Aerospace Engineering,
University of Virginia, Charlottesville, VA, USA,2Department of
Biomedical Engineering, University of Virginia, Charlottesville,
VA, USA, 3Department of Radiology,
University of Virginia, Charlottesville, VA, USA and 4Department
of Orthopaedic Surgery, University of Virginia,
Charlottesville, VA, USA
(Received 7 April 2012; accepted 3 October 2012)
AbstractThree computer models of varying complexity were
developed in order to investigate the kinematics, kinetics,
muscleoperating ranges, and energetics of rock climbing. First,
inverse dynamic models were used to investigate the joint angles
andtorques used in climbing and to quantify the total mechanical
work required for typical rock climbing. Climbing experiencewas
found to have a significant effect on the kinematics used in
climbing; however, there were no significant differences
inmechanical work. Second, a musculoskeletal model of the whole
body was developed, this model combined with thekinematic data was
used to analyze the operating ranges of the upper and lower limb
muscles during climbing. In general, theexperienced climbers
employed kinematic motions that corresponded to muscle fibers used
for climbing operating muchcloser to their optimum length than the
kinematics of inexperienced climbers. Third, a forward dynamic
model wasdeveloped to predict the metabolic goal of climbing. The
results of this model suggest that an experienced climbing
styleminimizes the fatigue of muscles while an inexperienced
climbing style minimizes the total joint torques generated.
Keywords: climbing, biomechanical modeling, work, efficiency,
optimum climbing strategies, inverse dynamics
Introduction
Rock climbing poses unique demands on the human
musculoskeletal system. In standard walking, the
lower body is primarily responsible for locomotion
and support; however, in climbing, both the upper
body and lower body provide both locomotion and
support. Climbing entails significant motion in the
vertical plane and is not primarily limited to the
horizontal motion typically associated with walking
(McIntyre, 1983). Climbing results in motion
mechanics that are drastically different from those
the body typically performs in everyday activities.
These unique mechanics and energetics are currently
poorly understood. An advanced understanding of
climbing mechanics will elucidate new methods for
training which will help decrease the loads during
climbing, reducing the chance of injury; increase the
efficiency of climbing, reducing the energy needed to
climb; and offer a deeper understanding of human
motor learning strategies and physical adaptation
development for atypical motions.
To date, research regarding the kinematics and
dynamics of rock climbing has focused on analysis of
the strategies the climbers use to maintain stability
while holding a static posture during climbing.
Marino and Kelly (1988) reported that as climbing
slopes increased from 608 to 1208 (908 being vertical),
the percentage of body weight supported by the
upper body increased from approximately 20% to
40%. Others have investigated the dynamic changes
in the support forces, applied through the hands and
feet, when transitioning from a static quadrupedal
state (four-limb support) to a static tripedal state
(three-limb support) by removing a support foot
(Quaine, Martin, & Blanchi, 1997a; Quaine &
ISSN 1934-6182 print/ISSN 1934-6190 online q 2012 Taylor &
Francis
http://dx.doi.org/10.1080/19346182.2012.749831
Correspondence: S.D. Russell, Department of Mechanical &
Aerospace Engineering, University of Virginia, 122 Engineers Way,
P.O. Box 400746,
Charlottesville, VA 22904-4746, USA. E-mail:
[email protected]
Sports Technology, AugustNovember 2012; 5(34): 120131
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
Martin, 1999). Although these studies attempted to
limit the center of mass (CoM) motion resulting in
static trials, they found that to maintain balance,
climbers began the transfer of reaction forces away
from the limb to be removed prior to initiating the
transfer from a quadruped to a triped state. Others
have found similar balance strategies employed when
varying wall slope (Noe, Quaine, & Martin, 2001)
and for various optimal and suboptimal climbing
postures (Quaine, Martin, & Blanchi, 1997b; Testa,
Martin, & Debu, 1999). However, each of these
methods limited the climber to static positions, and
none have calculated the joint loads associated with
the climbing moves.
Previous work regarding the efficiency of rock
climbing has been focused on comparing the
anthropometry and physiology of climbers and non-
climbers. This work has demonstrated that climbers
are typically small in stature with elevated strength to
body mass ratios (Grant, Hynes, Whittaker, &
Aitchison, 1996; Watts, 2004). Aerobic power
analysis has shown that climbers tend to have lower
oxygen consumption compared with the mean
endurance athlete (Booth, Marino, Hill, & Gwinn,
1999; Mermier, Janot, Parker, & Swan, 2000),
suggesting that their aerobic fitness level is consistent
with one required for quick recovery from high
intensity effort. Mermier, Robergs, McMinn, and
Heyward (1997) found that oxygen consumption of
elite rock climbers on moderate terrain is equivalent to
running at 2.6 ms21. However, climbing is a
stochastic activity with spurts of action interspersed
with periods of resting/static support. It is, therefore,
difficult to measure a steady-state VO2 consumption
rate, and the reports of mean VO2 range widely from
18.6 to 43.8 ml(kgmin)21, for similar climbing
conditions (Billat, 1995; Mermier et al., 1997;
Watts, Daggett, Gallagher, & Wilkins, 2000).
Although these measurements offer insight into
individual climbers and their climbing strategies, it
is difficult to apply those strategies to the general
population due to the effects of individual condition-
ing, rest to climb ratio, and averaging.
Computer models have the potential to offer
insights into complex human motions. Previously,
simple forward dynamics models with limited degrees
of freedom have been used to demonstrate multiple
complex properties of walking, including stability and
control of joint angles (Garcia, Chatterjee, Ruina, &
Coleman, 1998; Goswami, Espiau, & Thuilot, 1996;
Morgan, Mochon, & Julian, 1982), and also the
efficiency of motion due to the distribution of joint
torque (Kuo, 2002). In addition, more complex
models are often used in both forward and inverse
dynamic simulations of human movement. These
inverse models have been used to quantify joint
torques and forces, muscle mechanics and motor
control of human walking (Arnold, Ward, Lieber, &
Delp, 2010), running (Edwards, Taylor, Rudolphi,
Gillette, & Derrick, 2010), and jumping (Anderson &
Pandy, 1999). However, these models have primarily
focused on motions supported entirely by the lower
extremity and were not developed to include the
upper extremity as a part of the support and control of
locomotion.
In this paper, we describe our recent work using
three computer models of climbing with varying
complexity to answer a range of questions regarding
the mechanics and energetics of climbing. The first
inverse dynamics model was developed to quantify
the kinematic, kinetic, and energetic differences
between experienced and inexperienced climbing
motions. The second musculoskeletal model was
used to evaluate how differences in these kinematic
strategies affect muscle force-generating capacity.
Finally, the third forward dynamic model was
developed to investigate the energetic goals of
differing strategies for rock climbing. Each of these
models was created based on a set of human climbing
motion capture experiments that made use of a
custom climbing wall instrumented with six force
plates.
Methods
Human climbing experiments
Twelve healthy participants participated in this study,
including seven inexperienced climbers and five
experienced climbers, where experienced was defined
as comfortable climbing 5.10 on the YosemiteDecimal System (5.10
YDS, VII-UIAA, or 20Australia). The inexperienced climber group
con-
sisted of five males and two females averaging
26.7 ^ 5.0 years of age, 177.1 ^ 5.7 cm in height,
and 75.3 ^ 9.1 kg in mass. The experienced climber
group included two males and three females averaging
29.8 ^ 8.6 years of age, 169.8 ^ 9.4 cm in height,
and 62.0 ^ 9.4 kg in mass. All tests were conducted in
the Motion Analysis and Motor Performance Lab-
oratory at the University of Virginia. Participant
consent was approved by the University of Virginias
Human Investigation Committee and was obtained
for all participants.
Participants were given up to 20 min of free
climbing time prior to data collection to acclimate
themselves to the climbing wall. They were then
instructed to climb the wall (approximately 35 cm
steps) using their self-selected climbing strategy.
Participants were instructed to ascend then descend
the climbing wall three times per trial, pausing briefly
in a four-point stance when changing directions.
Kinetic data were collected using a climbing wall
instrumented with six custom force plates (Bertec,
Mechanics of rock climbing 121
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
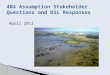
Figure 1. Experimental set-up used in data collection, including
the instrumented climbing wall with typical grip placement.
S. D. Russell et al.122
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
Columbus, OH, USA), each with seven possible
grip-mounting locations (Figure 1). 3D kinematic
data were collected using a six-camera Vicon Motion
Analysis System (Oxford Metrics, Oxford, UK) at
120 Hz, and a modified full-body Plug in Gait marker
set, 35 markers. At least three ascents were
performed and measurements were averaged for
each trial, with the participants moving from one
four-point posture to another four-point posture.
Analyzed data began at the initiation of movement
from the lower grip set and ended when the climber
reached a neutral posture on the upper grip set.
Inverse dynamic model
To quantify the kinematics and joint kinetics of
climbing, a 3D, 17 segment, 16 joint, participant-
specific model (Figure 2) was created for each
participant in MSC.Adams, using the LifeMod plug-
in (Biomechanics Research Group, San Clemente,
CA, USA), from individual anthropometric data
(age, weight, height, and gender). The 17 model
segments included the following: head, neck, upper
torso, central torso, lower torso, upper arms (2),
lower arms (2), hands (2), upper legs (2), lower legs
(2), and feet (2) (Figure 2). The segments physical
properties were defined using the Generator of Body
Data (GeBOD) database (Cheng, Obergefell, &
Rizer, 1994). The 16 joints were each specified as a
ball joint with three degrees of freedom; however, the
elbow and wrist joints are reduced to two axis and the
knee joints are reduced to only one axis.
Development of this model in the MSC.Adams
environment facilitated the application of external
forces (wall contacts) from two sources: (1) direct
application of experimentally measured forces (Ber-
tec force plates) and (2) the predictive modeling of
wall contact forces. Wall contact, from grasping and
releasing climbing grips, was also modeled in the
MSC.Adams environment. For simulations
described in this study, model inputs were the
measured marker positions exported from VICON to
the LifeMod model and measured contact for data
and position, and outputs based on inverse kinematic
and dynamic models were joint angles, forces, and
torques. From these parameters, we can calculate
energetic parameters as described below. An advan-
tage of this model over others (Willems, Cavagna,
& Heglund, 1995) is that it facilitates the quantifi-
cation of energetics down to the level of each joint
degree of freedom.
Total work, Wtot, is the sum of the external work
Wext, work done to move the system CoM, and the
internal work Wint, work done to move the body
segments about the CoM:
W tot W int W ext X
i
jtiDuij; 1
W ext X
i
jFjDSj j; 2
where ti is the torque at joint i, ui is the angle of joint i,Fj
is the composite force applied to the wall in the jth
cardinal direction, and Sj is the composite body CoM
displacement in the jth cardinal direction. All
mechanical work data presented in this study have
been normalized by climber mass and the vertical
distance traveled, J(kgm)21.
Musculoskeletal model
The second musculoskeletal model was similar to the
first in degrees of freedom and was developed in the
Opensim environment. This full-body model
(Figure 3) combines previously developed models
of the upper extremity (Holzbaur, Murray, & Delp,
Mono
Colo
Figure 2. Three-dimensional inverse dynamics model utilized
for
inverse dynamic simulations and work calculations.
Mechanics of rock climbing 123
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
2005) and lower extremity (Arnold et al., 2010). The
combined model includes 112 independent muscles
(54 in the lower extremity and 58 in the upper
extremity). Muscles that cross only the wrist and
finger joints were excluded from the upper extremity
model to reduce computation time and simplify data
analysis. Measured motion data were used as input
for the inverse kinematic simulations, which resulted
in muscle parameters for each movement pattern as
the output.
Of particular interest are the fiber lengths of each
muscle as the participants perform their climbing
task. Muscle fiber length is directly related to skeletal
kinematics, and the maximum force generated by a
muscle is a function of fiber length (Zahalak &
Motabarzadeh, 1997). This analysis allows one to
determine how chosen climbing kinematics may
affect the amount of available muscle force being
used in climbing and the amount of strength in
reserve. This has obvious implications for injury
prevention, training, and also may have implications
on the efficiency of force generation.
Forward dynamic model
A third, 2D sagittal plane, model with five degrees of
freedom was created using Adams/View (MSC.Soft-
ware Corporation, Santa Ana, CA, USA) to mimic the
Figure 3. A full-body musculoskeletal model was used to
determine muscle behavior during climbing.
Figure 4. Forward dynamic climbing model created in
Adams/View. Actuators (red arrows) and joints at contact
points
(blue arrows) are shown (Colour online).
S. D. Russell et al.124
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
sagittal plane motion which occurs during the
standing/pulling phase of climbing (Figure 4). This
model capable of both inverse and forward dynamic
simulations was developed to predict the joint torques
required for optimum efficiency of a desired climbing
trajectory, given a specified cost function. The model
consists of seven rigid bodies linked together by
revolute joints. The seven bodies represent the foot,
shank, thigh, torso/head, humerus, forearm, and hand
while the joints between segments represent the ankle,
knee, hip, shoulder, elbow, and wrist. The torso
segment includes a rigidly attached circular body to
represent the head and to maintain accurate
distribution of mass between the segments. Each
segment of the model is scaled based on the
participant-specific anthropometry while the masses
and (CoM) locations of each of the segments were
chosen based on normalized values in the literature
(Winter, 1990).
For this model, two simplified (sagittal plane only)
kinematic and CoM positioning strategies for the
ascension phase (standing/pulling up) of climbing
were analyzed (Figure 5).
(1) Experienced style: Elbows extended, CoM further
away from the wall.
(2) Inexperienced style: Elbow bent, CoM close to the
wall.
Matlab-MSC.Adams co-simulation routines (Zirker,
2011) were used with this model to calculate the joint
torques required to perform these movements. This
was done using two solution methods: first using
measured wall reaction forces and inverse dynamics
to calculate the actual joint moments used by the
climber, and second using optimization routines for
forward dynamic predictive simulations. The second
solution method employed Matlab-based SQP
optimization algorithms to calculate the optimum
joint torques required to reproduce the reference
kinematics.
For optimization, three cost functions that
characterized the efficiency of the climbing model
in unique ways were implemented. The first cost
function was the sum of total mechanical work done
by each joint, as described in the inverse dynamics
model. The second cost function was the sum of the
square of the joint torques (Tsqr). The third cost
function was the sum of the square of the normalized
joint torque (Tmax), where the torque developed by
each muscle group is normalized by the maximum
isometric joint torque. These values have been shown
to be representative of the efficiency of individual
muscle groups to do work. The maximum isometric
torques were found in the literature for the
lower extremities (Arnold et al., 2010), shoulder
(Holzbaur et al., 2005), elbow, and wrist (Holzbaur,
Delp, Gold, & Murray, 2007). The trunk and wrist
muscles were not included in the Tmax calculations.
This was due to the limited data regarding
maximum isometric torques related to our trunk
joints, and the small values of wrist torque and
associated noise.
For comparison purposes, all results were normal-
ized by the inverse dynamic solutions of an average
climb. Total work is not dependent on the number of
simulated time steps. However, Tsqr and Tmax values
were dependent on the climbing duration, so these
values were also normalized by the number of
discretely simulated steps for each simulation.
Statistics
Repeated measures ANOVA were performed to
determine any differences between the climbing
styles. To quantify differences between performed
Figure 5. Schematic detailing the kinematics of each climbing
style over the course of a single climbing stride.
Mechanics of rock climbing 125
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
tasks, Students paired t-tests (two-tailed) were used.
Data were considered significant for p , 0.05.
Results
Motion capture measurements of climbing demon-
strated that the joint kinematic trajectories varied
greatly both between climbers and between trials for
individual climbers. However, the general climbing
patterns used were similar to those reported for
ladder climbing (Armstrong, Young, Woolley, Ash-
ton-Miller, & Kim, 2009; Hammer & Schmalz,
1992; McIntyre & Bates, 1982; McIntyre, 1983).
These climbing patterns included diagonal and
lateral gait, coordinated movement of the contral-
ateral arm and leg, and the collateral arm and leg,
respectively. Each climbing style had a temporal
pattern of two beats, concurrent motion of limbs, or
four beats, with slight delay between coordinated
limb motions. In addition, we found some climbers
employed a strategy not reported in ladder climbing.
These strategies, leading limb climbing, employed
four distinct movements (four beat motion) where
the climbing gait was initiated with either, the
reaching up with both hands followed by stepping
up with both feet, or stepping up with both feet then
reaching up with both hands.
Generally the experienced group of climbers used
a different kinematic strategy than the inexperienced
climbers. Experienced climbers maintained a posture
with a more extended elbow and flexed knee
compared to inexperienced climbers (Figure 6).
These differences in climbing kinematics can be seen
in the differing joint force trajectories of a typical
climb from each group (Figure 7). The result of these
kinematics is that, contrary to the common assump-
tion that experienced climbers tend to keep their
bodies close to the climbing surface to reduce loads,
the experienced climbers climbed with their CoM
farther from the wall compared to the inexperienced
climbers (Figure 8).
Climbing requires substantially more mechanical
work than walking: climbing in our study typically
required over 10 times more work than walking;
total mechanical work for climbing was 18.0^
2.2 J(kgm)21 compared to the total mechanical
work for healthy walking which has been previously
reported to be 1.02.0 J(kgm)21 (Mian, Thom,
Ardigo, Narici, & Minetti, 2006; Russell, Bennett,
Sheth, & Abel, 2011; Willems et al., 1995). Despite
the different kinematic strategies employed by the
experienced and inexperienced climbers, there were
no significant differences in the work done between
the groups. Of the work done in climbing, Wextrepresented 62.2 ^
6.3% of the total work, which is
similar to normal walking where the mean contri-
bution of Wext to Wtot is 55% (Willems et al., 1995).
Further analysis showed the distribution of Wtot done
by sections of the body was upper body
36.7 J(kgm)21, trunk 12.4 J(kgm)21, and lower
Figure 6. Comparison of a representative climbing stride,
experienced (dark blue) and inexperienced (orange) climbers. As
shown above,
each climber stepped up with the left foot followed by the
right, then stood/pulled up followed by reaching up with the left
then the right hand.
Joint angles (left) and torques (right) are shown for the ankle
and knee joints (Colour online).
S. D. Russell et al.126
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
body 50.9 J(kgm)21, and experience had no
significant effect.
Analysis of the musculoskeletal model demon-
strated that the kinematic movement patterns resulted
in differences in operating ranges of muscles during
climbing, between the experienced and inexperienced
climbers. The force generating capacity of a muscle
fiber is a function of the fiber length (background of
Figure 9) where optimum fiber length corresponds to
the length of maximum force generation (Zajac,
1989). Normalized fiber lengths were found to vary
between groups (Figure 9). Experienced climbers
used climbing strategies that kept the operating fiber
lengths of the biceps brachii closer to their optimal
fiber lengths than the inexperienced climbers. Con-
versely, the inexperienced climbers used strategies in
which the triceps brachii operated closer to its
optimum fiber length.
Using the third model to explore which parameters
climber might be trying to minimize, the efficiency
Figure 7. Kinematic differences between the experienced (dark
blue) and inexperienced (orange) were more pronounced in the
upper
extremities. Differences between the elbow and knee, minimum,
mean, and maximum, joint angles are shown. 08 represents joint
neutral
(normal posture in extension) (Colour online). *p , 0.05, **p ,
0.01, and ***p , 0.001.
Figure 8. Distance of climbers CoM from the wall in normal
climbing, experienced (dark blue) and inexperienced (orange)
climbers. Minimum, mean, and maximum distances reported over
onestride (Colouronline). *p , 0.05,**p , 0.01, and***p ,
0.001.
Mechanics of rock climbing 127
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
measures, work, Tsqr, or Tmax. We found the relative
efficiency of each climbing style (Figure 5) varied
depending on the cost function. Calculations from
actual joint torques used in each of the two desired
climbing trajectories showed that experienced climb-
ing strategy (straight arms) was the most efficient
for all efficiency quantities (Figure 10). More
interestingly, optimization of the joint torques
resulted in kinetics with increased efficiency
(decreased values of efficiency quantities) for all
simulations conducted except for the Tmax value for
the experienced climbing strategy which remained
nearly the same as the inverse dynamic calculation.
This may indicate that Tmax is a quantity that
experienced climbers are minimizing through
training.
Figure 9. Minimum,mean, and maximum fiber lengths of experienced
(dark blue) and inexperienced (orange) climbers are identified by
asterisks
or circles depending on significance of the differences between
the two groups (Colour online). *p , 0.05, **p , 0.01, and ***p ,
0.001.
Figure 10. Total costs for inverse dynamic (measured) and
optimized (simulated) joint torques for the experienced (dark blue)
and
inexperienced (orange) climbing styles. Note that the inverse
dynamic Tmax for the experienced climbing style does not reduce
with
optimization (Colour online).
S. D. Russell et al.128
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
Discussion
The three models presented here provide a new
paradigm for the analysis of the kinematics, kinetics,
efficiency, and control of dynamic rock climbing.
Here, these models have been used to quantify differ-
ences between experienced and inexperienced clim-
bers. The first model showed that the experienced
and inexperienced climbers used different joint
kinematics at the elbow and knee when climbing.
This resulted in differing CoM trajectories, but no
difference in the total mechanical work done by each
group. The second model depicts how the elbow
kinematics employed by the experienced and
inexperienced groups facilitate greater maximum
force generation in the biceps brachii (elbow flexion)
and triceps brachii (elbow extension), respectively.
Simulations from the third model show that climbers
may use different physiologic goals when climbing,
inexperienced climbers minimize the magnitude of
force they develop in climbing, Tsqr, whereas
experienced climbers minimize magnitude of force
generated relative to their maximum force generating
capacity, Tmax. Each model has been developed and
implemented to further our knowledge about a
unique aspect of climbing.
Kinematic differences between groups lead to
experienced climbers maintaining their CoM farther
from the climbing surface than the inexperienced
climbers (Figure 8). Zampagni, Brigodoi, Schena,
Tosi, and Ivanenko (2011) reported similar differences
between the CoM position of experienced and
inexperienced climbers. This was unexpected as the
generally accepted method for efficient climbing is to
minimize the distance of the CoM to the wall, thus
reducing the increased load due to the increased CoM
induced moment. This may be due to the size of the
grips used in these studies, both used large easy to hold
grips allowing for the distribution of force across the
entire hand; expert climbing routs often incorporate
small grips where few and occasionally only one finger
is used to support the climbers load. In these cases, the
added load caused by an increased CoM couple may be
the difference in a successful climb or a fall. In cases of
climbing with reduced grip size, studies may find that
experienced climbers begin to move their CoM closer
to the climbing surface. In addition, the kinematics
used in climbing result in an energy-intensive method
of locomotion. This is evident when the energy cost of
climbing are compared to the energy required for
typical bipedal walking on level ground (Mian et al.,
2006; Russell et al., 2011; Willems et al., 1995).
However, it is interesting that the total mechanical
work done for experienced and inexperienced climbers
was not different despite the varying kinematic
approaches used by the two groups, and the qualitative
differences observation in their energy levels at the end
of data collection.
In climbing, the elbow contributes to the vertical
motion in the upward direction by developing a
flexion moment. When overlaying the operating
ranges of the normalized fiber lengths of the biceps
brachii (primary elbow flexor), developed using the
second model, on the normalized forcelength curve
of muscle, it is apparent that the different kinematics
used shifting the operating length of the muscle fibers
closer to optimal fiber length for the experienced
climbing group (Figure 9). The forcelength curve
represents the maximum available force generation of
the muscle at full activation. Muscles operating at or
near the peak are able to generate much more force
per activated fiber than one operating below the peak
(Murray, Buchanan, & Delp, 2000), which would
theoretically result in a more metabolically efficient
development of joint torque. Thus, although doing
the same amount of work as the inexperienced
climber, the experienced climber may employ
climbing kinematics that put the muscles used in
climbing closer to their optimum fiber lengths,
allowing them to do that work with more efficiency
and with more force available in reserve.
It is generally accepted that when humans move we
do so with an objective of reaching a destination or a
goal while minimizing some quantity. Although many
parameters are likely included in this minimized
quantity, i.e., distance, metabolism, pain, boredom,
and weather, we often simplify it to only include
some measure of energetics, such as work, force
generation Tsqr, or fatigue Tmax. Our simulations
using the third model indicate that the experienced
climbers employed a climbing strategy that mini-
mized the energetic quantity of Tmax. Tmax represents
the percentage of the total available muscle force used
in climbing and has been related to muscle fatigue
(Ackermann & van den Bogert, 2010). This would
indicate that experienced climbers have learned that
fatigue is the limiting factor when climbing. However,
the inexperienced climbing strategy was most efficient
when the Tsqr value was used as the cost function,
indicating that the inexperienced climbers are not
worried about fatigue as much as they are about the
metabolic cost of generating muscle force (Umberger
& Rubenson, 2011).
When the results are combined, the three models
presented here are capable of offering a broad picture
of how successful climbing is achieved, and the role
of experience in developing climbing style. However,
the models in their current forms have limitations.
The first two models do not incorporate muscle co-
contraction, the simultaneous contraction of agonist
muscle pairs about a joint often employed to increase
the stability of a joint often when learning new
movements. The inclusion of co-contraction would
Mechanics of rock climbing 129
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
likely result in higher work numbers for all climbers,
the current model reports the net work done at a joint
while the actual work would include both the positive
and negative work done by antagonist muscle. We
hypothesize that inexperienced climbers would have
a higher level of co-contraction, thus increasing the
differences in work between groups. In the second
model co-contraction may also result in changes in
muscle length, co-contracting muscles would
increase the net force on a muscle that may result
in increased stretch of the muscle tendons and
shortening of the muscle belly. Finally, the kin-
ematics of the third model were fixed while the joint
torques were optimized based on a given cost
function. Relaxing the joint kinematics constraints
may allow the model to be useful for the prediction of
better, reduced work, peak loads, reaction forces,
etc., climbing modalities. The accuracy of Tmaxresults was
limited by the use of published average
muscle volumes. Previous work has shown that
experienced climbers tend to have a smaller and
more compact physique compared to inexperienced
climbers that may manifest in the difference between
muscle volumes in the two groups.
This work provides a basis for comparison for any
future climbing studies that analyze joint kinematics
or make quantitative comparisons between experi-
enced and inexperienced climbers. Future studies
should investigate whether climbing kinematics in
general have an effect on work done. In addition, the
models and techniques developed here should be
used to elucidate the differences between how and
where (joint specific) the experienced and inexperi-
enced climbers generate the work done in climbing.
This would allow us to better tailor training
regiments to increase the efficiency of the climber,
and more importantly it would allow us to under-
stand the increased loads due to various climbing
strategies, increasing our understanding of where
and when injuries may occur. This may help to
understand the overrepresentation of injuries to the
upper body reported in sport climbers (Peters,
2001). We are currently incorporating MR imaging
and climber-specific muscle volumes into the models
to increase the fidelity of the effects of musculature
on climbing movements. This forward dynamic
model demonstrates that simple models can offer
unique insights into human movement. This paper
described the use of three simple cost functions;
however, the model is developed to allow the
addition of other more complex cost functions for
optimization. In addition, the kinematics of this
model were constrained as an input; however, these
constraints can be removed to allow the model to
optimize both joint torques and kinematics. Such
simulations could offer even more information on
how climbers choose their climbing strategies and
how those choices change with experience.
Conclusion
Rock climbing is increasing in popularity both as a
competitive sport and as an outdoor adventure
activity. With this increase in popularity, little has
been done to investigate the biomechanics of
climbing. The energetics and mechanics of climbing
are complicated. This paper demonstrates how
models can provide new insights into the complex-
ities of climbing mechanics and energetics, which
would not be achievable through experiments/obser-
vation alone. These new insights can help us to better
understand why we choose specific climbing kin-
ematics. In addition, they may lead to new more
efficient climbing and training strategies that mini-
mize injury risk while maximizing climbing ability.
Acknowledgements
The authors would like to thank the staff at the
Motion Analysis and Motor Performance Lab,
KCRC, at the University of Virginia. This work was
funded by the DARPA-DOD Z-Man Program.
References
Ackermann, M., & van den Bogert, A. J. (2010).
Optimality
principles for model-based prediction of human gait. Journal
of
Biomechanics, 43, 10551060.
Anderson, F. C., & Pandy, M. G. (1999). A dynamic
optimization
solution for vertical jumping in three dimensions. Computer
Methods in Biomechanics and Biomedical Engineering, 2,
201231.
Armstrong, T. J., Young, J., Woolley, C., Ashton-Miller, J.,
& Kim,
H. (2009). Biomechanical aspects of fixed ladder climbing:
Style, ladder tilt and carrying. Proceedings of the human
factors
and ergonomics society annual meeting, 53, 935939.
Arnold, E., Ward, S., Lieber, R., & Delp, S. (2010). A model
of the
lower limb for analysis of human movement. Annals of
Biomedical Engineering, 38, 269279.
Billat, V. (1995). Energy specificity of rock climbing and
aerobic
capacity in competitive sport rock climbers. Journal of
Sports
Medicine and Physical Fitness, 35, 20.
Booth, J., Marino, F., Hill, C., & Gwinn, T. (1999). Energy
cost of
sport rock climbing in elite performers. British Journal of
Sports
Medicine, 33, 1418.
Cheng, H., Obergefell, L., & Rizer, A. (1994).Generator of
body data
(GEBOD) manual. Dayton, OH: Systems Research Labs, Inc.
Edwards, W. B., Taylor, D., Rudolphi, T. J., Gillette, J. C.,
&
Derrick, T. R. (2010). Effects of running speed on a
probabilistic stress fracture model. Clinical Biomechanics,
25,
372377.
Garcia, M., Chatterjee, A., Ruina, A., & Coleman, M. (1998).
The
simplest walking model: Stability, complexity, and scaling.
Journal of Biomechanical Engineering, 120, 281288.
Goswami, A., Espiau, B., & Thuilot, B. (1996).
Compass-like
bipedal robot part I: Stability and bifurcation of passive
gaits.,
Technical Report 2996, INRIA.
Grant, S., Hynes, V., Whittaker, A., & Aitchison, T.
(1996).
Anthropometric, strength, endurance and flexibility
character-
S. D. Russell et al.130
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2
-
istics of elite and recreational climbers. Journal of Sports
Sciences,
14, 301309.
Hammer, W., & Schmalz, U. (1992). Human behavior when
climbing ladders with varying inclinations. Safety Science,
15,
2138.
Holzbaur, K. R. S., Delp, S. L., Gold, G. E., & Murray, W.
M.
(2007). Moment-generating capacity of upper limb muscles in
healthy adults. Journal of Biomechanics, 40, 24422449.
Holzbaur, K. R. S., Murray, W. M., & Delp, S. L. (2005). A
model
of the upper extremity for simulating musculoskeletal
surgery
and analyzing neuromuscular control. Annals of Biomedical
Engineering, 33, 829840.
Kuo, A. D. (2002). Energetics of actively powered locomotion
using the simplest walking model. Journal of Biomechanical
Engineering-Transactions of the Asme, 124, 113120.
Marino, G., & Kelly, P. (1988). Modifications of force
distribution
in novice rock climbing technique. Proceedings of the 6th
international symposium on biomechanics in sports
(pp. 347353).
McIntyre, D. R. (1983). Gait patterns during free choice
ladder
ascents. Human Movement Science, 2, 187195.
McIntyre, D. R., & Bates, B. T. (1982). Effects of rung
spacing on
the mechanics of ladder ascent. Journal of Human Movement
Studies, 8, 5572.
Mermier, C. M., Janot, J. M., Parker, D. L., & Swan, J. G.
(2000).
Physiological and anthropometric determinants of sport
climb-
ing performance.British Journal of SportsMedicine, 34,
359365.
Mermier, C. M., Robergs, R. A., McMinn, S. M., &
Heyward,
V. H. (1997). Energy expenditure and physiological responses
during indoor rock climbing. British Journal of Sports
Medicine,
31, 224228.
Mian, O. S., Thom, J. M., Ardigo, L. P., Narici, M. V., &
Minetti,
A. E. (2006). Metabolic cost, mechanical work, and
efficiency
during walking in young and older men. Acta Physiologica,
186,
127139.
Morgan, D. L., Mochon, S., & Julian, F. J. (1982). A
quantitative
model of intersarcomere dynamics during fixed-end contrac-
tions of single frog muscle fibers. Biophysical Journal, 39,
189196.
Murray, W. M., Buchanan, T. S., & Delp, S. L. (2000).
The
isometric functional capacity of muscles that cross the
elbow.
Journal of Biomechanics, 33, 943952.
Noe, F., Quaine, F., & Martin, L. (2001). Influence of
steep gradient supporting walls in rock climbing:
biomechanical
analysis. Gait & Posture, 13, 8694.
Peters, P. (2001). Orthopedic problems in sport climbing.
Wilderness & Environmental Medicine, 12, 100110.
Quaine, F., & Martin, L. (1999). A biomechanical study
of
equilibrium in sport rock climbing. Gait & Posture, 10,
233239.
Quaine, F., Martin, L., & Blanchi, J. P. (1997a). Effect of
a leg
movement on the organization of the forces at the holds in a
climbing position 3-D kinetic analysis. Human Movement
Science, 16, 337346.
Quaine, F., Martin, L., & Blanchi, J. P. (1997b). The effect
of body
position and number of supports on wall reaction forces in
rock
climbing. Journal of Applied Biomechanics, 13, 1423.
Russell, S., Bennett, B., Sheth, P., & Abel, M. (2011). The
gait of
children with and without cerebral palsy: Work, energy, and
angular momentum. Journal of Applied Biomechanics, 27,
99107.
Testa, M., Martin, L., & Debu, B. (1999). Effects of the
type of
holds and movement amplitude on postural control associated
with a climbing task. Gait & Posture, 9, 5764.
Umberger, B. R., & Rubenson, J. (2011). Understanding
muscle
energetics in locomotion: New modeling and experimental
approaches. Exercise and Sport Sciences Reviews, 39, 5967.
Watts, P. (2004). Physiology of difficult rock climbing.
European
Journal of Applied Physiology, 91, 361372.
Watts, P. B., Daggett, M., Gallagher, P., & Wilkins, B.
(2000). 185,
190 Metabolic response during sport rock climbing and the
effects of active versus passive recovery. International Journal
of
Sports Medicine, 21.
Willems, P. A., Cavagna, G. A., & Heglund, N. C. (1995).
External, internal and total work in human locomotion.
Journal
of Experimental Biology, 198, 379393.
Winter, D. A. (1990). Biomechanics and motor control of
human
movement. NY: Wiley-Interscience.
Zahalak, G. I., & Motabarzadeh, I. (1997). A re-examination
of
calcium activation in the Huxley cross-bridge model. Journal
of
Biomechanical Engineering, 119, 2029.
Zajac, F. E. (1989). Muscle and tendon: properties, models,
scaling, and application to biomechanics and motor control.
Critical Reviews in Biomedical Engineering, 17, 359411.
Zampagni, M. L., Brigadoi, S., Schena, F., Tosi, P., &
Ivanenko,
Y. P. (2011). Idiosyncratic control of the center of mass in
expert climbers. Scandinavian Journal of Medicine & Science
in
Sports, 21, 688699.
Zirker, C. (2011). Development of biomechanical models to
identify efficient locomotive strategies in rock climbing.
Masters
of Engineering, University of Virginia, VA.
Mechanics of rock climbing 131
Dow
nloa
ded
by [R
MIT
Univ
ersity
] at 2
3:13 2
3 Dec
embe
r 201
2