Embed Size (px)
DESCRIPTION
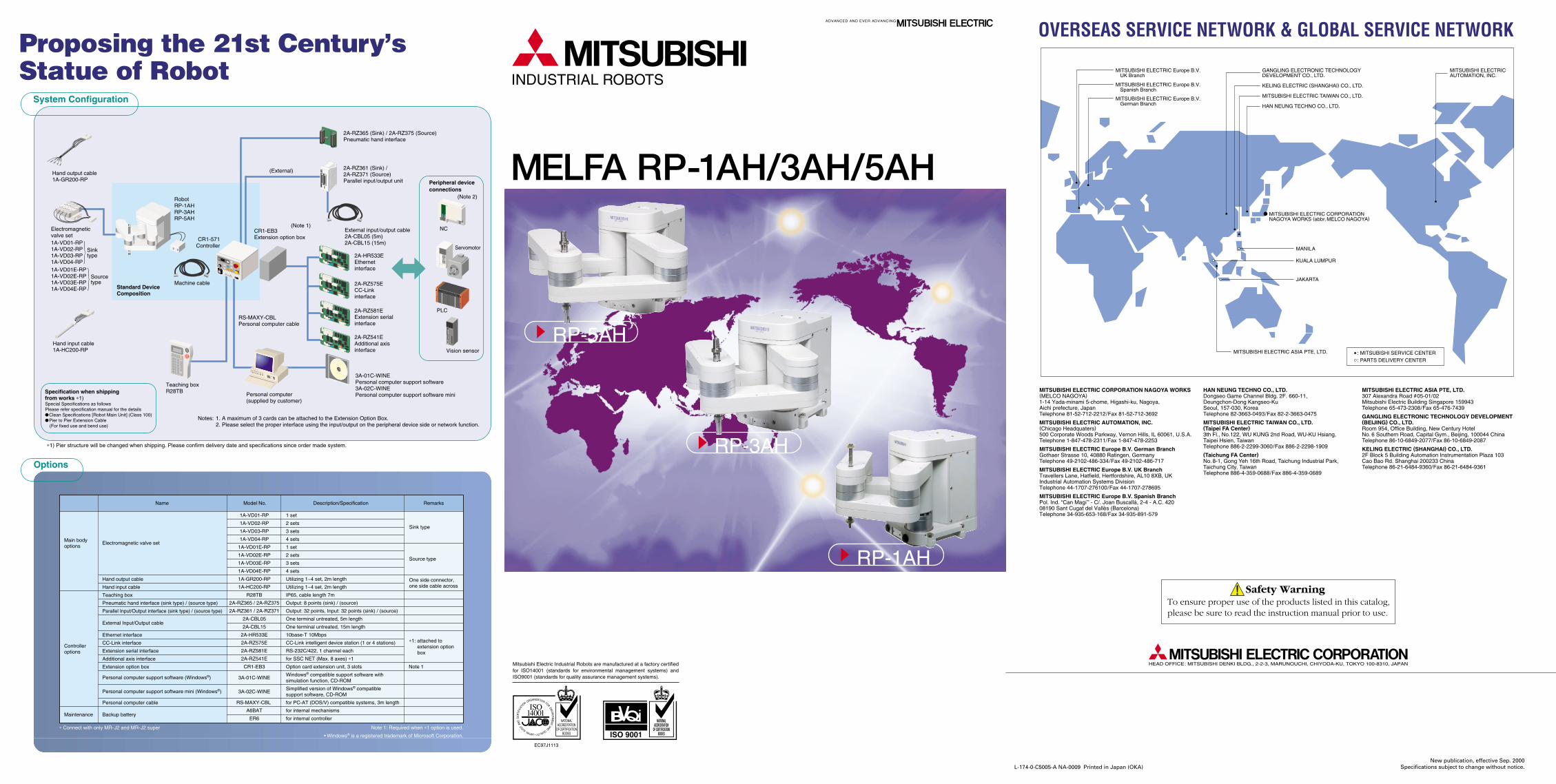
CR1-EB3 Extension option box Teaching box R28TB MITSUBISHI ELECTRIC Europe B.V. UK Branch RS-MAXY-CBL Personal computer cable 2A-RZ581E Extension serial interface Ethernet interface CC-Link interface Extension serial interface Additional axis interface Extension option box 2A-RZ575E CC-Link interface MITSUBISHI ELECTRIC Europe B.V. German Branch Robot RP-1AH RP-3AH RP-5AH 2A-HR533E Ethernet interface : MITSUBISHI SERVICE CENTER : PARTS DELIVERY CENTER 2A-RZ541E Additional axis interface PLC NC
Citation preview
MITSUBISHI ELECTRIC Europe B.V.UK Branch
MITSUBISHI ELECTRIC Europe B.V.German Branch
GANGLING ELECTRONIC TECHNOLOGYDEVELOPMENT CO., LTD.
KELING ELECTRIC (SHANGHAI) CO., LTD.
MITSUBISHI ELECTRIC TAIWAN CO., LTD.
HAN NEUNG TECHNO CO., LTD.
MITSUBISHI ELECTRICAUTOMATION, INC.
: MITSUBISHI SERVICE CENTER: PARTS DELIVERY CENTER
MITSUBISHI ELECTRIC CORPORATIONNAGOYA WORKS (abbr.MELCO NAGOYA)
MANILA
KUALA LUMPUR
JAKARTA
MITSUBISHI ELECTRIC ASIA PTE, LTD.
OVERSEAS SERVICE NETWORK & GLOBAL SERVICE NETWORK
MITSUBISHI ELECTRIC CORPORATION NAGOYA WORKS(MELCO NAGOYA)1-14 Yada-minami 5-chome, Higashi-ku, Nagoya,Aichi prefecture, JapanTelephone 81-52-712-2212/Fax 81-52-712-3692
MITSUBISHI ELECTRIC AUTOMATION, INC.(Chicago Headquaters)500 Corporate Woods Parkway, Vernon Hills, IL 60061, U.S.A.Telephone 1-847-478-2311/Fax 1-847-478-2253
MITSUBISHI ELECTRIC Europe B.V. German BranchGothaer Strasse 10, 40880 Ratingen, GermanyTelephone 49-2102-486-334/Fax 49-2102-486-717
MITSUBISHI ELECTRIC Europe B.V. UK BranchTravellers Lane, Hatfield, Hertfordshire, AL10 8XB, UKIndustrial Automation Systems DivisionTelephone 44-1707-276100/Fax 44-1707-278695
MITSUBISHI ELECTRIC Europe B.V. Spanish BranchPol. Ind. “Can Magí ” - C/. Joan Buscallà, 2-4 - A.C. 42008190 Sant Cugat del Vallès (Barcelona)Telephone 34-935-653-168/Fax 34-935-891-579
HAN NEUNG TECHNO CO., LTD.Dongseo Game Channel Bldg. 2F. 660-11,Deungchon-Dong Kangseo-KuSeoul, 157-030, KoreaTelephone 82-3663-0493/Fax 82-2-3663-0475
MITSUBISHI ELECTRIC TAIWAN CO., LTD.(Taipei FA Center)3th Fl., No.122, WU KUNG 2nd Road, WU-KU Hsiang,Taipei Hsien, TaiwanTelephone 886-2-2299-3060/Fax 886-2-2298-1909
(Taichung FA Center)No. 8-1, Gong Yeh 16th Road, Taichung Industrial Park,Taichung City, TaiwanTelephone 886-4-359-0688/Fax 886-4-359-0689
MITSUBISHI ELECTRIC ASIA PTE, LTD.307 Alexandra Road #05-01/02Mitsubishi Electric Building Singapore 159943Telephone 65-473-2308/Fax 65-476-7439
GANGLING ELECTRONIC TECHNOLOGY DEVELOPMENT(BEIJING) CO., LTD.Room 954, Office Building, New Century HotelNo. 6 Southern Road, Capital Gym., Beijing, 100044 ChinaTelephone 86-10-6849-2077/Fax 86-10-6849-2087
KELING ELECTRIC (SHANGHAI) CO., LTD.2F Block 5 Building Automation Instrumentation Plaza 103Cao Bao Rd. Shanghai 200233 ChinaTelephone 86-21-6484-9360/Fax 86-21-6484-9361
New publication, effective Sep. 2000Specifications subject to change without notice.L-174-0-C5005-A NA-0009 Printed in Japan (OKA)
MITSUBISHI ELECTRIC Europe B.V.Spanish Branch
System Configuration
Options
RP-1AH
RP-5AH
Hand output cable1A-GR200-RP
Electromagneticvalve set1A-VD01-RP1A-VD02-RP1A-VD03-RP1A-VD04-RP
Hand input cable1A-HC200-RP
2A-RZ365 (Sink) / 2A-RZ375 (Source)Pneumatic hand interface
2A-RZ361 (Sink) /2A-RZ371 (Source)Parallel input/output unit
External input/output cable2A-CBL05 (5m)2A-CBL15 (15m)
2A-HR533EEthernet interface
2A-RZ575ECC-Link interface
2A-RZ581EExtension serial interface
2A-RZ541EAdditional axis interface
RobotRP-1AHRP-3AHRP-5AH
CR1-571Controller
CR1-EB3Extension option box
RS-MAXY-CBLPersonal computer cable
Teaching boxR28TB
Servomotor
NC
Specification when shippingfrom works ∗1)Special Specifications as followsPlease refer specification manual for the detailsClean Specifications [Robot Main Unit] (Class 100)Pier to Pier Extension Cable
(For fixed use and bend use)
(External)
RP-3AH∗1) Pier structure will be changed when shipping. Please confirm delivery date and specifications since order made system.
(Note 1)
Machine cableStandard DeviceComposition
Personal computer(supplied by customer)
3A-01C-WINEPersonal computer support software3A-02C-WINEPersonal computer support software mini
Peripheral deviceconnections
(Note 2)
PLC
Vision sensor
Notes: 1. A maximum of 3 cards can be attached to the Extension Option Box.2. Please select the proper interface using the input/output on the peripheral device side or network function.
1 set
2 sets
3 sets
4 sets
1 set
2 sets
3 sets
4 sets
Utilizing 1~4 set, 2m length
Utilizing 1~4 set, 2m length
IP65, cable length 7m
Output: 8 points (sink) / (source)
Output: 32 points, Input: 32 points (sink) / (source)
One terminal untreated, 5m length
One terminal untreated, 15m length
10base-T 10Mbps
CC-Link intelligent device station (1 or 4 stations)
RS-232C/422, 1 channel each
for SSC NET (Max. 8 axes) ∗1
Option card extension unit, 3 slots
Windows® compatible support software with simulation function, CD-ROM
Simplified version of Windows® compatiblesupport software, CD-ROM
for PC-AT (DOS/V) compatible systems, 3m length
for internal mechanisms
for internal controller
Hand output cable
Hand input cable
Teaching box
Pneumatic hand interface (sink type) / (source type)
Parallel Input/Output interface (sink type) / (source type)
External Input/Output cable
Ethernet interface
CC-Link interface
Extension serial interface
Additional axis interface
Extension option box
Personal computer support software (Windows®)
Personal computer support software mini (Windows®)
Personal computer cable
Backup battery
1A-VD01-RP
1A-VD02-RP
1A-VD03-RP
1A-VD04-RP
1A-VD01E-RP
1A-VD02E-RP
1A-VD03E-RP
1A-VD04E-RP
1A-GR200-RP
1A-HC200-RP
R28TB
2A-RZ365 / 2A-RZ375
2A-RZ361 / 2A-RZ371
2A-CBL05
2A-CBL15
2A-HR533E
2A-RZ575E
2A-RZ581E
2A-RZ541E
CR1-EB3
3A-01C-WINE
3A-02C-WINE
RS-MAXY-CBL
A6BAT
ER6
Main bodyoptions
Controlleroptions
Maintenance
∗1: attached toextension option box
Note 1
One side connector,one side cable across
Sink type
Source type
Note 1: Required when ∗1 option is used.∗ Connect with only MR-J2 and MR-J2 super
Sinktype
1A-VD01E-RP1A-VD02E-RP1A-VD03E-RP1A-VD04E-RP
Sourcetype
Description/SpecificationModel No.Name Remarks
Electromagnetic valve set
• Windows® is a registered trademark of Microsoft Corporation.
INDUSTRIAL ROBOTS
MELFA RP-1AH/3AH/5AH
Mitsubishi Electric Industrial Robots are manufactured at a factory certified for ISO14001 (standards for environmental management systems) and ISO9001 (standards for quality assurance management systems).
EC97J1113
Proposing the 21st Century’sStatue of Robot

New Options Simplify Operation Ease and Expandability Improved communication interfaces for CC-Link, Ethernet and serial extensions.
5-Joint Closed Link Configuration In Pursuit of the Ultimate in High-speed, High-accuracy OperationAn original 5-joint closed link mechanism and 64bit CPU enables the robot to
operate at high speeds and with maximum accuracy; equal to that of process-dedicated equipment.
Cycle time of 0.28s*2 and repeat position accuracy of ±5µm achieved (RP-1AH).Multi-task function included for parallel processing of vision sensor and peripheral
control communications.*2 Cycle time is a reference value, and increases in accurate work occasionally.
Compact Space-saving DesignTaking up a space the size of an 81/2 ×11 sheet of paper and weighing only
approximately 8kg, the controller smallest in the industry. Installation and trans-portation are simple and easy.
Lining 3 RP-1AH units up side-by-side, the line is a space-saving 1.2m in length. Introduction of these robots into existing factory line space is no problem at all.
The robot main body weighs about 12kg and requires an installation space equal to that taken up by a sheet of paper (RP-1AH), thus making it easy to incorporate these robots into your current facilities.
Effective Lineup for Diversified NeedsThe RP Series of robots is available in type models, from the small RP-1AH to
the RP-5AH, which operates at a maximum weight load of 5kg.Compliant with cleaning inspection ratings Class 100/0.3µm. (special specifica-
tions*3)*3 Please confirm delivery terms.
Part size
Manpower+Fixing Tool
Small HighOperationaccuracy
Cycle time 0.28s100mm
RP-1AH
RP-3AH
RP-5AH
Only 1.2m even with 3 units side-by-side
400mm
1200mm
0.28 sec.
0.33 sec.
0.38 sec.
Large Low
Largevariety
Smallvariety
Smalllot
Largelot
Previous robot
Process-dedicatedmachine
Micro-assemblyrobot
25mm
∗1 Connector box section
∗2
RP-1AH motion limit
RP-5AH motion limit RP-3AH motion limit
Note: Dimensions of the ∗2 connector box are the same as those for the ∗1 connector box.
Features
Smallest Controller in the Industry Equipped with Powerful 64 bit CPUNew redesigned controller requires a setup area the size of an 81/2×11 sheet of
paper and weighs only approximately 8kg.Controller can operate at 120 or 200VAC. (200VAC only for CE)Controller option compatibility guaranteed.*1 The connector is different from that of the CR2-532 controller. If the controller is to be con-
nected to the main body of a previous model, the main body of the robot must be modified.
Main Applications
Robot Main Body External Dimensions
Controller External Dimensions
RP-1AHRP-1AH
RP-3AHRP-3AH
RP-5AHRP-5AH
CR1-571CR1-571
200150(31) (31) 49
212 290(38) (more than 170)
(40)
151
(15)
(2.5) (2.5)
Approx. 90212
151
Controller Main BodyCR1-571
Extension Option Box (option)CR1-EB3
85
176
216
26316 65 85
144.5
62.5 100
200
50 *1125
110
*1
C
8
8
(R)
60 *
1
Installation screw for tooling support
2-M4 screw depth 6 (from backside of arm)
2L2
L3 28 L3
R42
R42 L1
6
Common to RP-3AH/5AH
Section C detail
280
(13)
35 *2
30
B
A
4242
118
103.
531
1
20°
105°
170190210
332
297
533 90
R260
R260
160°
ø14H7
30
50
(12)
118
55.
5
(ø23)
(ø15)
13.5
13.5 (ø23)
ø14H7
15
3.5
835
(12)
13.5
13.5
Section A detail *3 Section B detail *3
20°
105°
130150148
332
R200
210
381 90
55
ø6H7
(ø8)
5.5
(ø8)
(ø18)
5.5
(ø18)
(7)
0.5
4
M6 screw
M5 screw depth 6
passes throughø3 hole
Section A details *3 Section B details *3
R14
0
R140
95
233
277
150
R236
70
110°
20°
100105
165
140
150
38 *1
82 *
1
133
162
95
140
56 28 (56)
R30.5
R30.5 100
7648
200
2
12030
180
155
5
6
6
16
50 *
1
56 120
56
122
(R)
6
2-M4 screwdepth 6 (from backsideof arm)
Installation screw for tooling support
2-M4 screwdepth 6
Installation screw for tooling support
C
Notes:1. *1 is standard processing face
dimensions for installation.2. *2 is minimum cable processing
dimensions.3. *3 is under the condition of J4=0°.
6-M4 screwdepth 8
for installation of tooling
Tooling wiring outlet
4-ø7 for installation
Section C detail
2-ø4H7 rim∗ for knock pin
4-ø5 for installation
Rightelbow axis
End-effecter axis
End-effecteraxis motion
Leftelbowaxis
Leftshoulder axis
Rightshoulder axis
5-Joint Closed Link Mechanism
Motorrotation
160160°
160°160°
ModelsDimensions
L1
140
200
L2
200
260
L3
86
116
RP-3AH
RP-5AH
(8)
Tooling equipment, etc.
installation point
231
30 (
z st
roke
)
5485
9531
.531
.5
230
35 *2
21
Cable length, approx. 2000
180 *2
78
(connect to robot controller)
Connector box 2.3
Machine cable
B
A
R335R335
R200
R200
R453R453
Motorrotation
2-M4 screwdepth 6
Installation screw for tooling support
2-ø4H7 rim∗ for knock pin
6-M4 screw depth 8for installation of tooling
Tooling wiring outlet
4-ø7 for installation
Tooling equipment, etc.
installation point
Cable length, approx. 2000
50 (
z st
roke
)
Dimensions with Extension Option Box (CR1-EB3) attached.*When optional extension card is installed.
ø11 through hole
RP-1AH
Basic Specifications
ControllerMain Body
RP-1AH RP-3AH RP-5AH4
AC servomotor (all-axis brake attached)Absolute encoder
1 (0.5) 3 (1) 5 (2)
100+140 140+200 200+260236 335 453
150×105 (A6 size) 210×148 (A5 size) 297×210 (A4 size)
30 50
±200480 432480 432
800 960
3000 13300.28 0.33 0.38
±0.005 ±0.008 ±0.01
±0.01
±0.02 ±0.03
0.3×10 −3 1.6×10 −3 3.2×10 −3
0~40
Approx. 12 Approx. 24 Approx. 25Input: 8 points Output: 8 points (for each base)
—Floor-standing
IP30
ModelMotion degrees-of-freedomMotor drivePosition detectionMaximum loadcapacity (rated)∗1 kg
Arm length mmMaximum radial reach mm
W×D∗2 mmJ3 vertical
mmmotion
J4 Deg.J1 Deg./sJ2 Deg./s
J3 verticalmm/s
motionJ4 Deg./s
Cycle time∗3 sX-Y surface mmJ3 vertical
mmmotion
J4 Deg.Allowable wrist inertialmoment
kg•m2
Temperature °CWeight kgTool wiring∗4
Tool air pipingInstallationProtective structure
ModelPath controlNo. of control axes axisCPU
Main functions
Programming languagePosition learning Teaching position Points No. of steps Steps No. of programs Points
General I/O PointsExclusive input PointsHand I/O PointsEmergency stop input Points
Door switch input PointsRS232C PortsRS422 PortsExclusive hand slot SlotsExtension slot SlotsRobot I/O link Channels
Temperature °CHumidity %RH
Input voltage limit V
Power capacity∗5 kVAGround ΩConfigurationOverall dimensions∗7 mmWeight∗7 kg
CR1-571PTP, CP
4 simultaneous (max.)64 bit RISC/DSP
Indirect interpolation, direct interpolation,3-dimensional radii interpolation, palletizing,
condition branching, subroutines, multi-tasking, optimum adjustable speed control, optimum
override control, optimum route connection, etc.MELFA-BASIC IV
Teaching method, MDI method2,5005,000
8816/16 (max. when using options: 240/240)
Allocated by general output (1“STOP” point is fixed)8/0 (when using options: 8/8)
11
1 (for PC, vision sensor, etc. connection)1 (for teaching box only)
1 (electric hand and pneumatic hand interfaces only)0 (when option is used: 3 [for extension options])
1 (for connecting parallel I/O unit) 0–4045–85
180~253/90~132VAC, 1 phase(207~253VAC, 1 phase at CE∗6)
0.7less than 100 (D-type ground)
Independent mounting, open configuration212(W)×290(D)×151(H)
Approx. 8
Memorycapacity
Externalinput
Interface
Powersupply
Operatinglimits
Maximumspeed
Repeatpositionaccuracy
Cleaning Class 100 (0.3µm)
<Special Specifications> The following work environment safety specifications apply.
Note: Cleaning specifications is determined when an order is received, so please confirm the delivery term.
Note: Regarding cleaning specifications, there is a difference between specifications and external dimensions.
∗1: Maximum load capacity is that when the constant of the adjustable speed is limited.∗2: This reference explains that the unit covers the area the size of an A4 sheet of paper.∗3: Cycle time is a reference value, and increases in accurate work occasionally.∗4: The pneumatic hand interface (option) is required when tool (hand) output is used.∗5: Generally, the pattern of electricity consumption during operation is: RP-1AH,
approximately 0.5kW; RP-3AH/5AH, approximately 0.7kW.∗6: Default is set to 180~253 VAC at the time of shipping (CE specifications is set to
230 VAC±10% at the time of shipping).∗7: Dimensions listed exclude the Extension Option Box.
Note: Specifications are subject to change without prior notification.
RP-1AHC-SB RP-3AHC-SB RP-5AHC-SB
Highly rigid mechanismenables very accuratehigh-speed operation.
Cycle time is 0.28s and repeat position accuracy is ±5µm (RP-1AH).
The controller mechanism is the size of an 81/2×11 sheet of paper and weights approximately 12kg (RP-1AH).
The ability to add equip-ment internally offers additional space savings.
Closed LinkConstruction
Lightweight& Compact
High-Speed &High Accuracy
Internal EquipmentExpansion
RP Series Micro-assembly Robots–Smaller, Faster and More Accurate Developed in response to the need for high accuracy and high-density operations like that required by industries that utilize clean rooms. Series enhancements include a new smaller controller (fits on 81/2×11 sheets of paper).
Efficient Micro-assembly Robots Using New Robot with 5-Joint Closed Link Construction
Mounting of high-precision parts Sealing work Trimming tasks
Tracking tasks in food processing Tracking tasks in OA parts processing Visual parts feeding system










![PIM Allow RP - CiscoEnabling PIM Allow RP SUMMARY STEPS 1. enable 2. configure terminal 3. •ippimallow-rp[group-listaccess-list|rp-listaccess-list[group-listaccess-list]] •ipv6pimallow-rp[group-listaccess-list|rp](https://img.pdfslide.us/doc/110x75/607f45c1dead1859c566e06a/pim-allow-rp-cisco-enabling-pim-allow-rp-summary-steps-1-enable-2-configure.jpg)

















