Embed Size (px)
Citation preview
Robust and Accurate Tracking of Free SurfacesMarek Behr, Stefanie Elgeti, Philipp Knechtges, Lutz Pauli, Atanas Stavrev Chair for Computational Analysis of Technical Systems, RWTH Aachen Workshop on HPC and Parallel Computing Methods and Algorithms for Multiphase and Complex Fluids, Singapore, March 2–6, 2015
Outline
• Motivation • civil and marine engineering systems • production technology
• Robustness • coupled equation system • elevation equation and stabilization • application examples and parallelization
• Accuracy • boundary parametrization • NURBS-enhanced finite elements • isogeometric analysis
2
S. Elgeti and H. SauerlandDeforming Fluid Domains Within the Finite Element Method: Five
Mesh-Based Tracking Methods in Comparison
Archives of Computational Methods in Engineering(2015) arXiv:1501.05878
Motivation
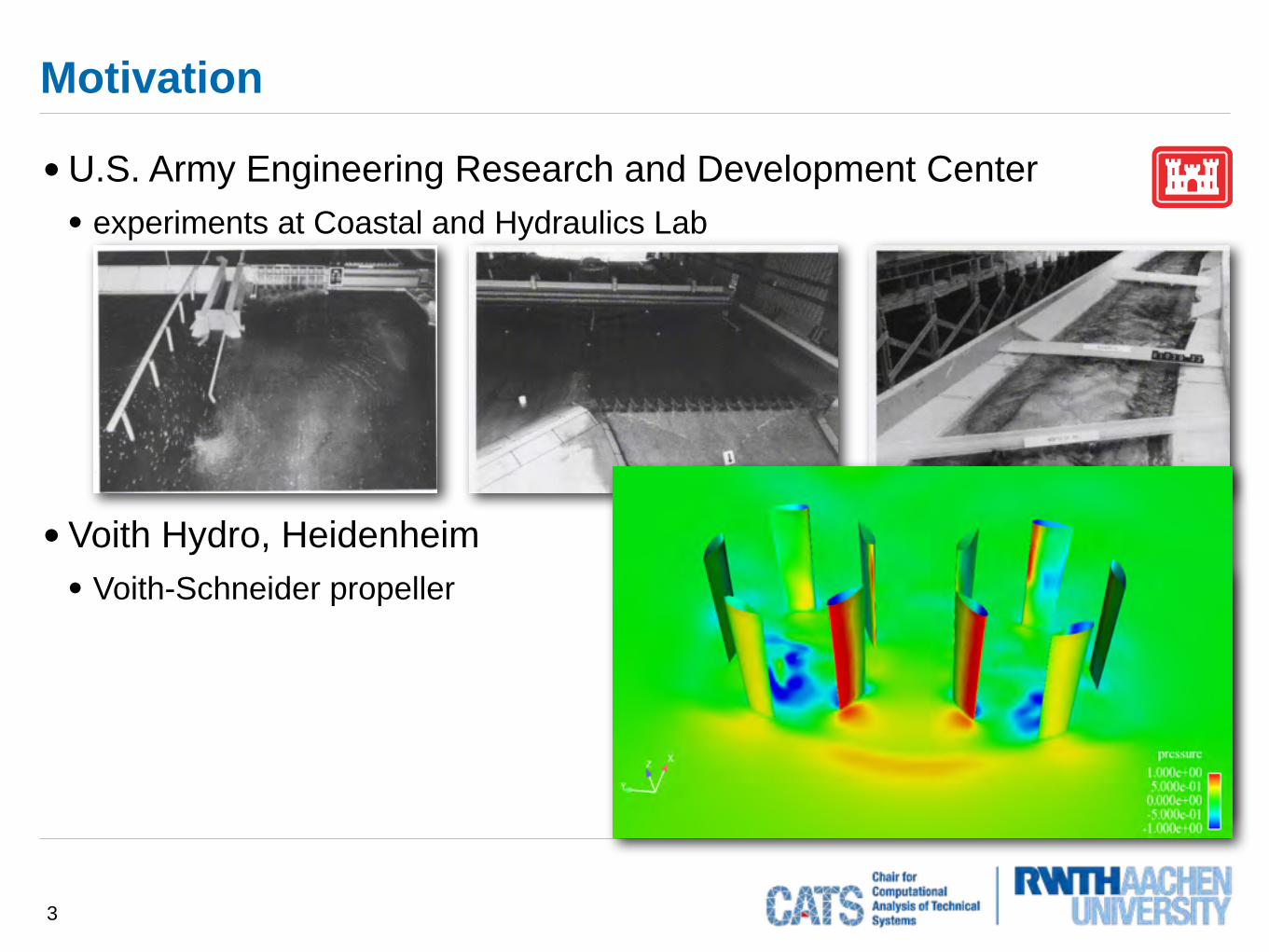
• U.S. Army Engineering Research and Development Center • experiments at Coastal and Hydraulics Lab
• Voith Hydro, Heidenheim • Voith-Schneider propeller
3
Motivation
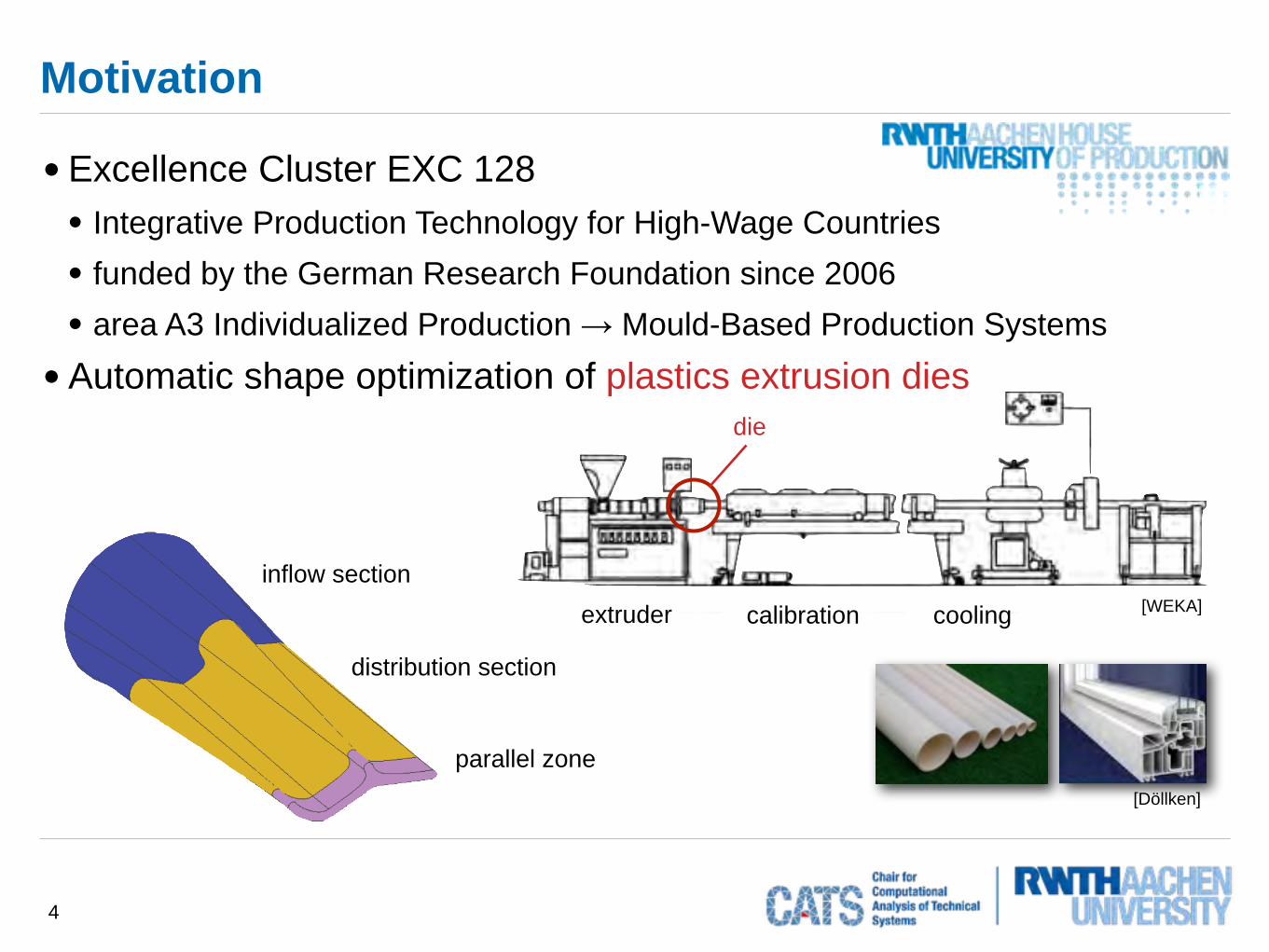
• Excellence Cluster EXC 128 • Integrative Production Technology for High-Wage Countries • funded by the German Research Foundation since 2006 • area A3 Individualized Production → Mould-Based Production Systems
• Automatic shape optimization of plastics extrusion dies
inflow section
distribution section
parallel zone
extruder calibration cooling
die
[WEKA]
[Döllken]
4
Coupled Deformation-Flow Problem
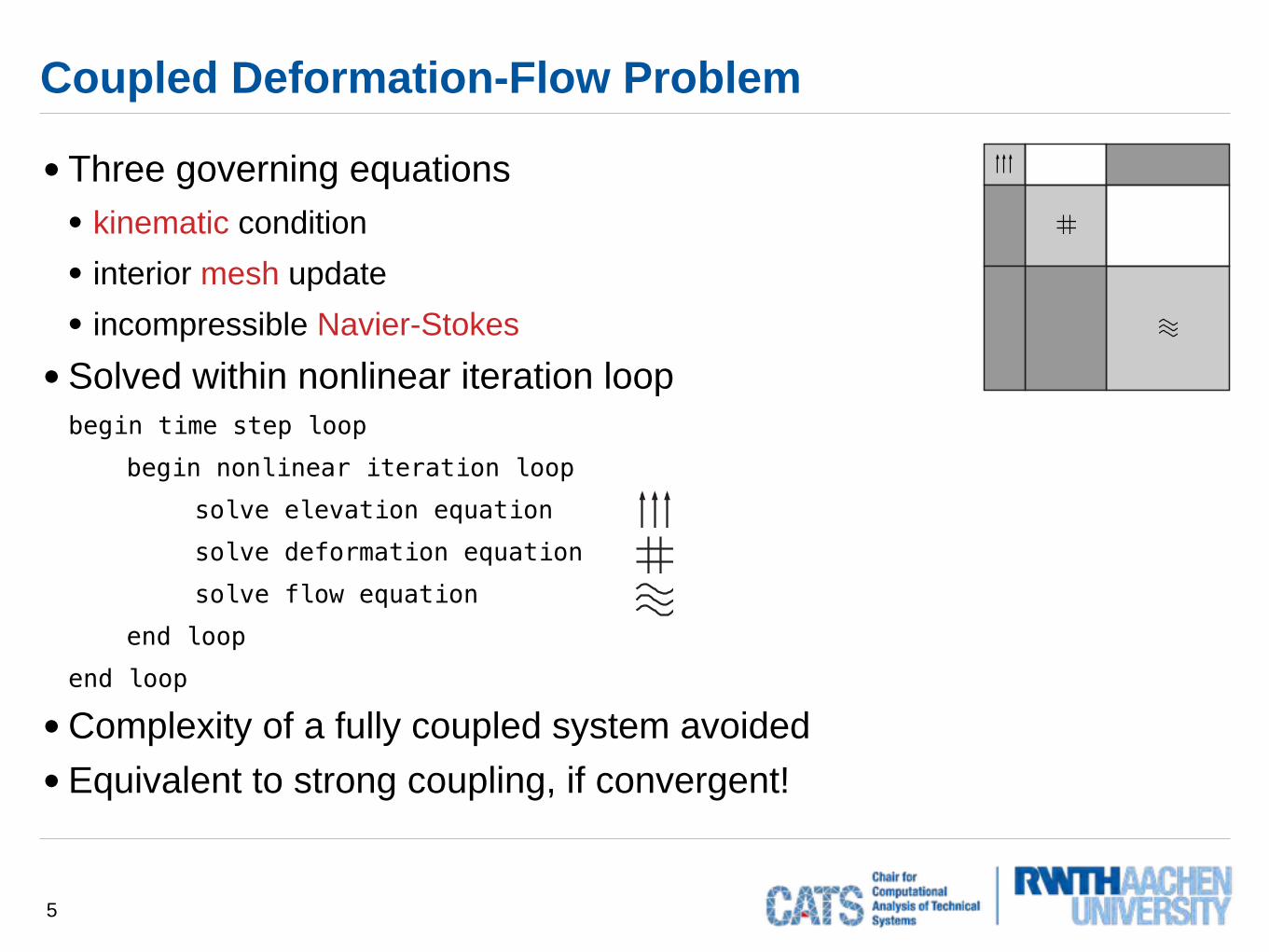
• Three governing equations • kinematic condition • interior mesh update • incompressible Navier-Stokes
• Solved within nonlinear iteration loop begin time step loop
begin nonlinear iteration loop solve elevation equation solve deformation equation solve flow equation
end loop end loop
• Complexity of a fully coupled system avoided • Equivalent to strong coupling, if convergent!
5
Governing Equations: Flow
6
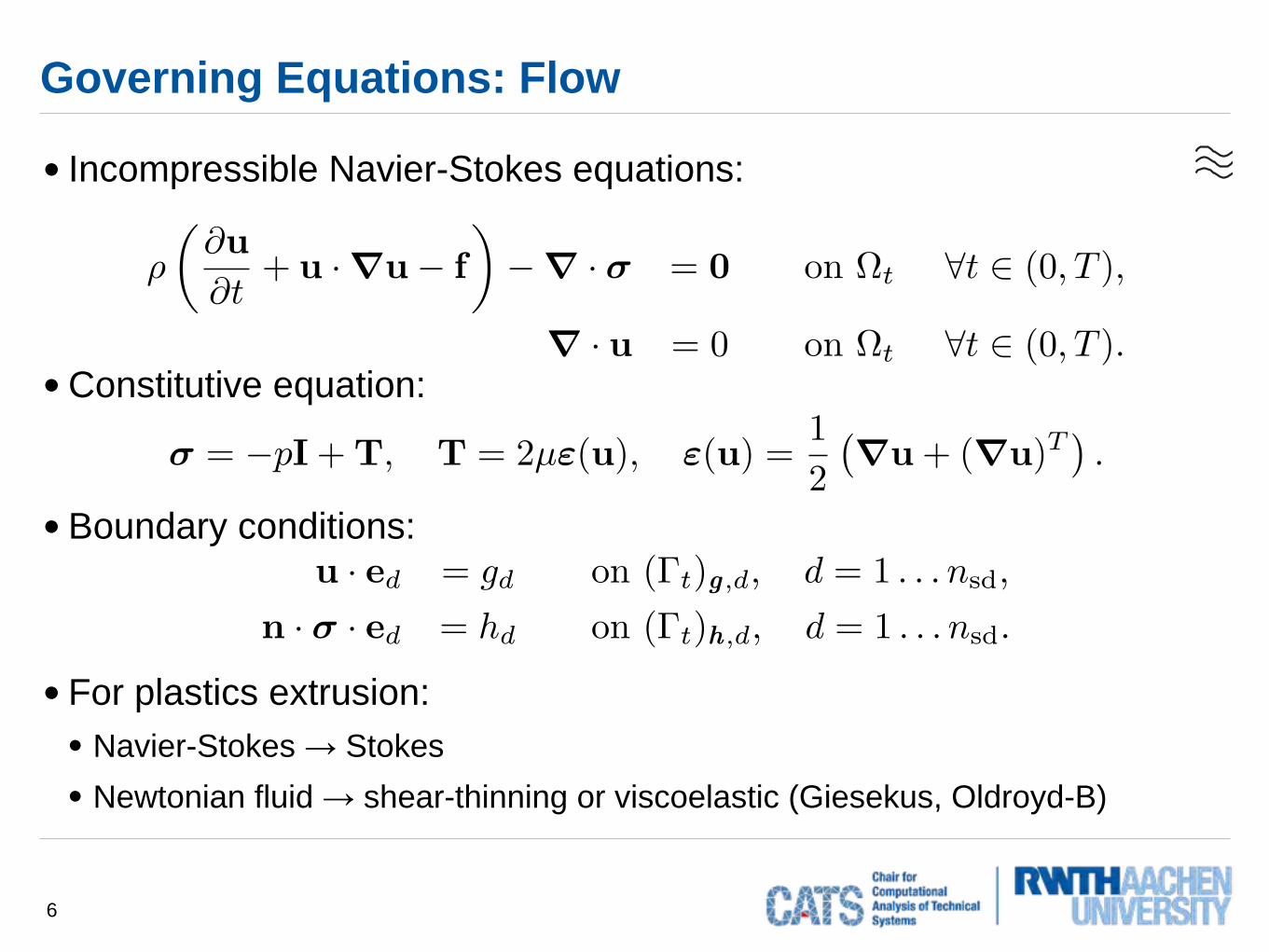
• Incompressible Navier-Stokes equations:
• Constitutive equation:
• Boundary conditions:
• For plastics extrusion: • Navier-Stokes → Stokes • Newtonian fluid → shear-thinning or viscoelastic (Giesekus, Oldroyd-B)
Galerkin Least-Squares Formulation: Flow
7
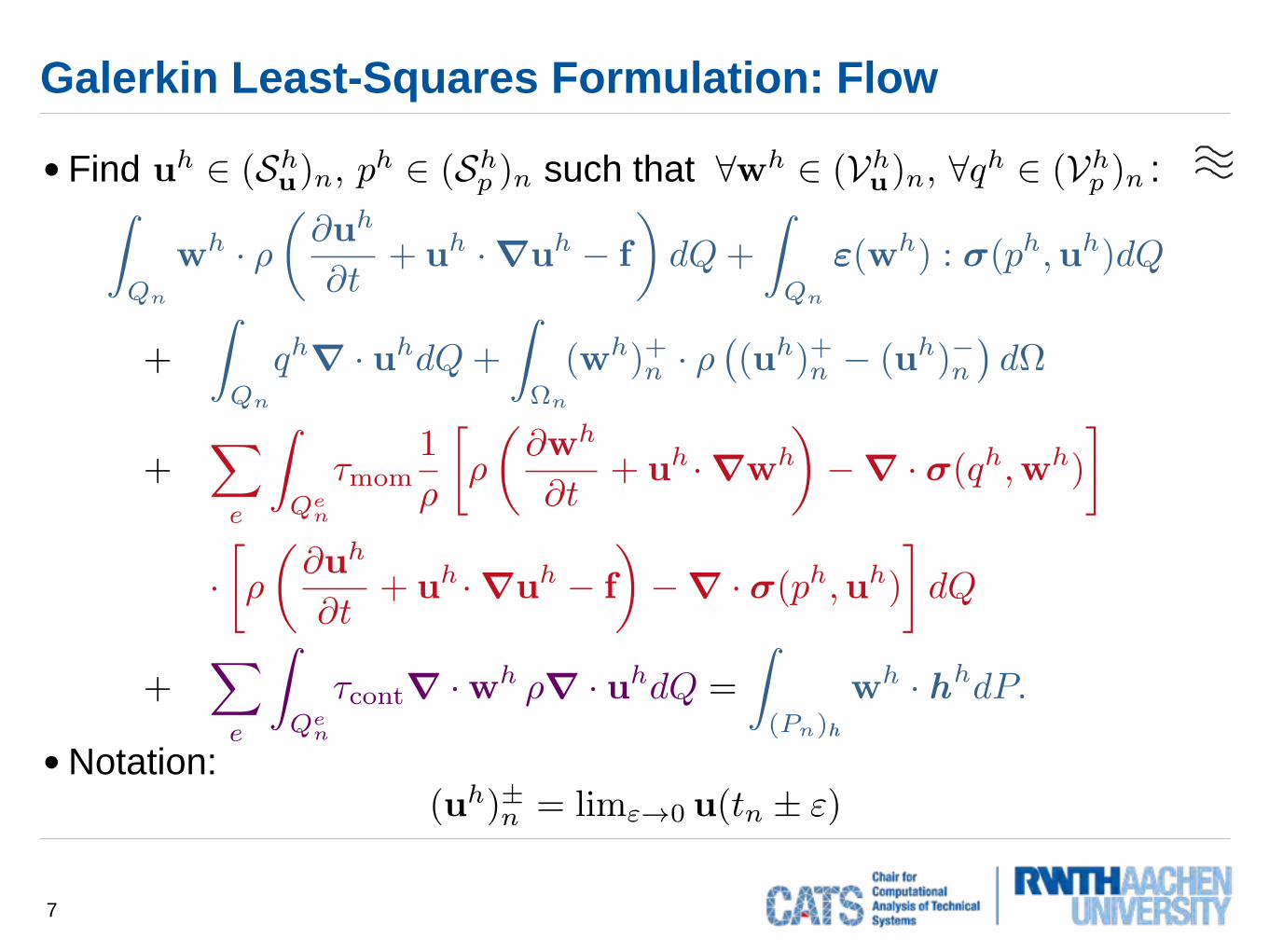
• Find such that :
• Notation:
Governing Equations: Deformation
8
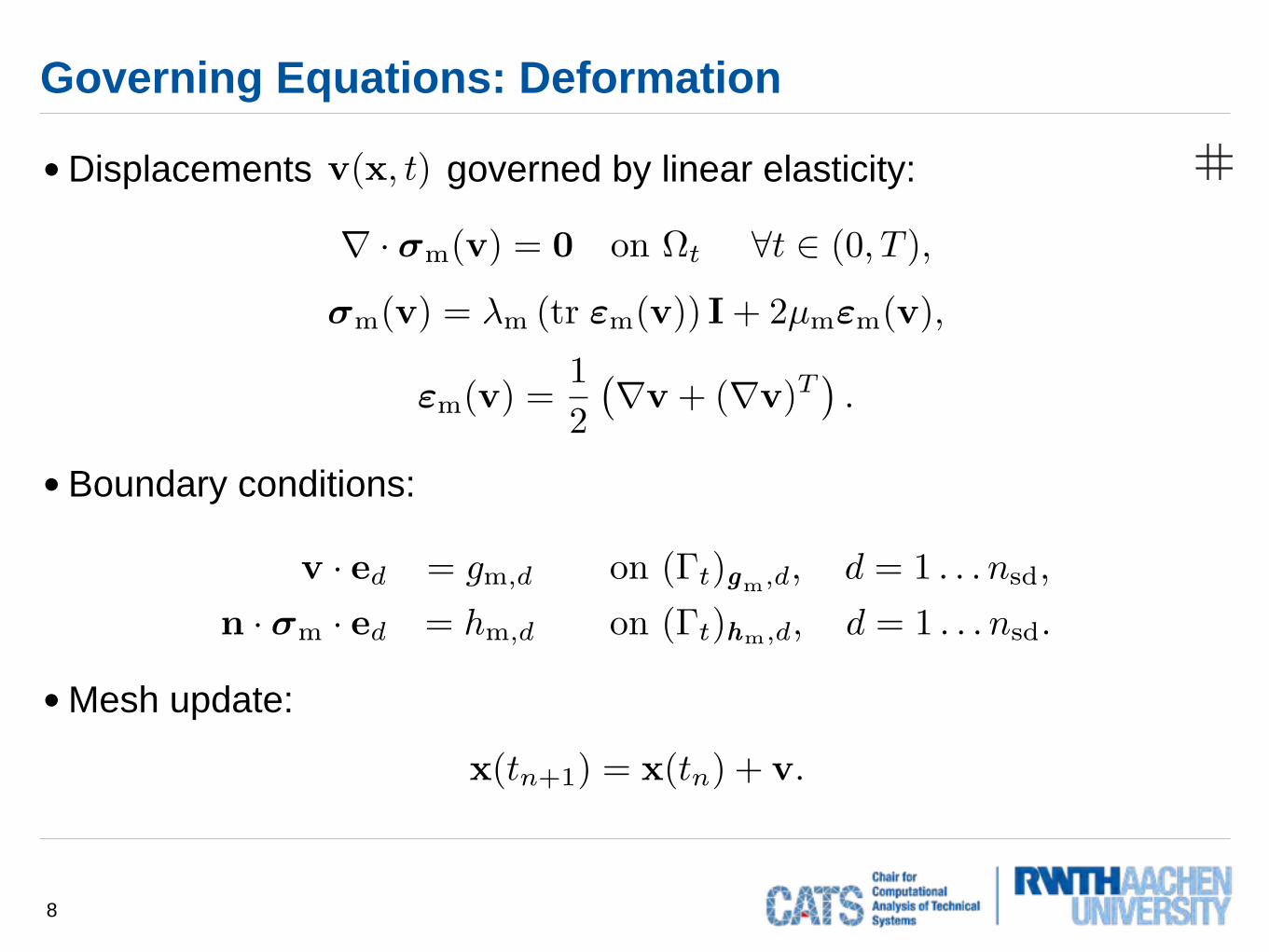
• Displacements governed by linear elasticity:
• Boundary conditions:
• Mesh update:
Galerkin Formulation: Deformation
9
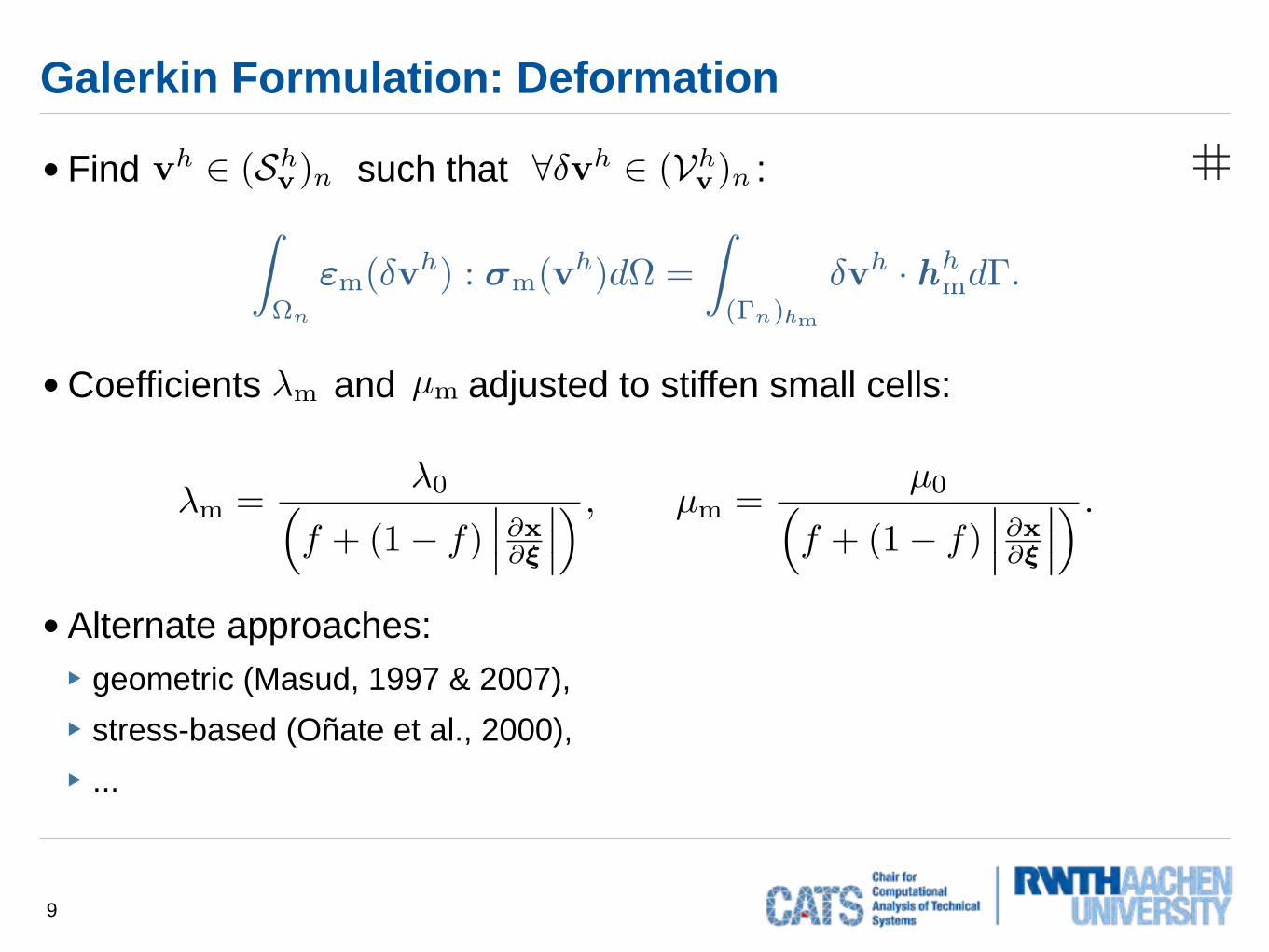
• Find such that :
• Coefficients and adjusted to stiffen small cells:
• Alternate approaches: ▶ geometric (Masud, 1997 & 2007), ▶ stress-based (Oñate et al., 2000), ▶ ...
Governing Equations: Elevation
10
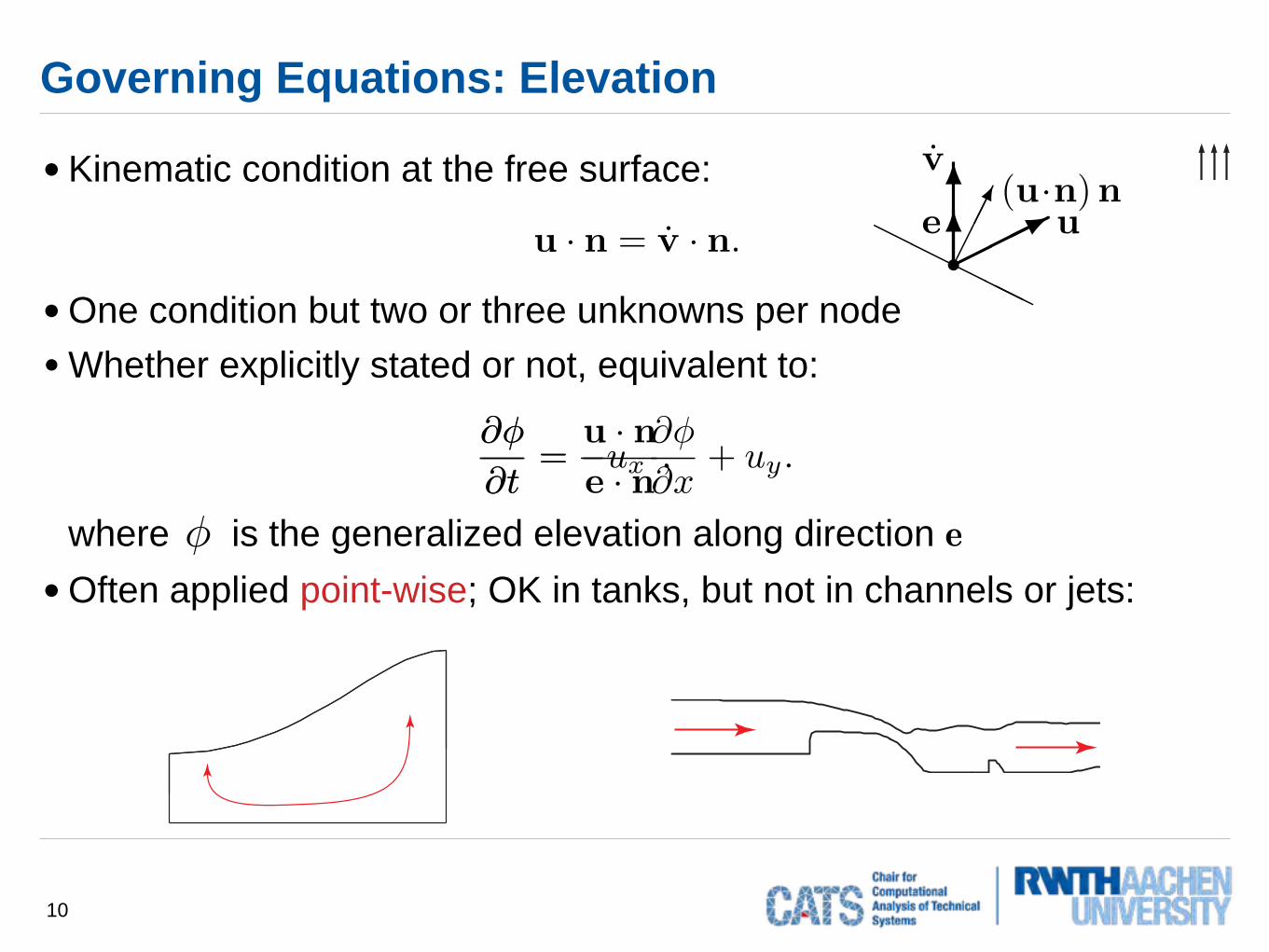
• Kinematic condition at the free surface:
• One condition but two or three unknowns per node •Whether explicitly stated or not, equivalent to: where is the generalized elevation along direction e
• Often applied point-wise; OK in tanks, but not in channels or jets:
Galerkin Least-Squares Formulation: Elevation
11
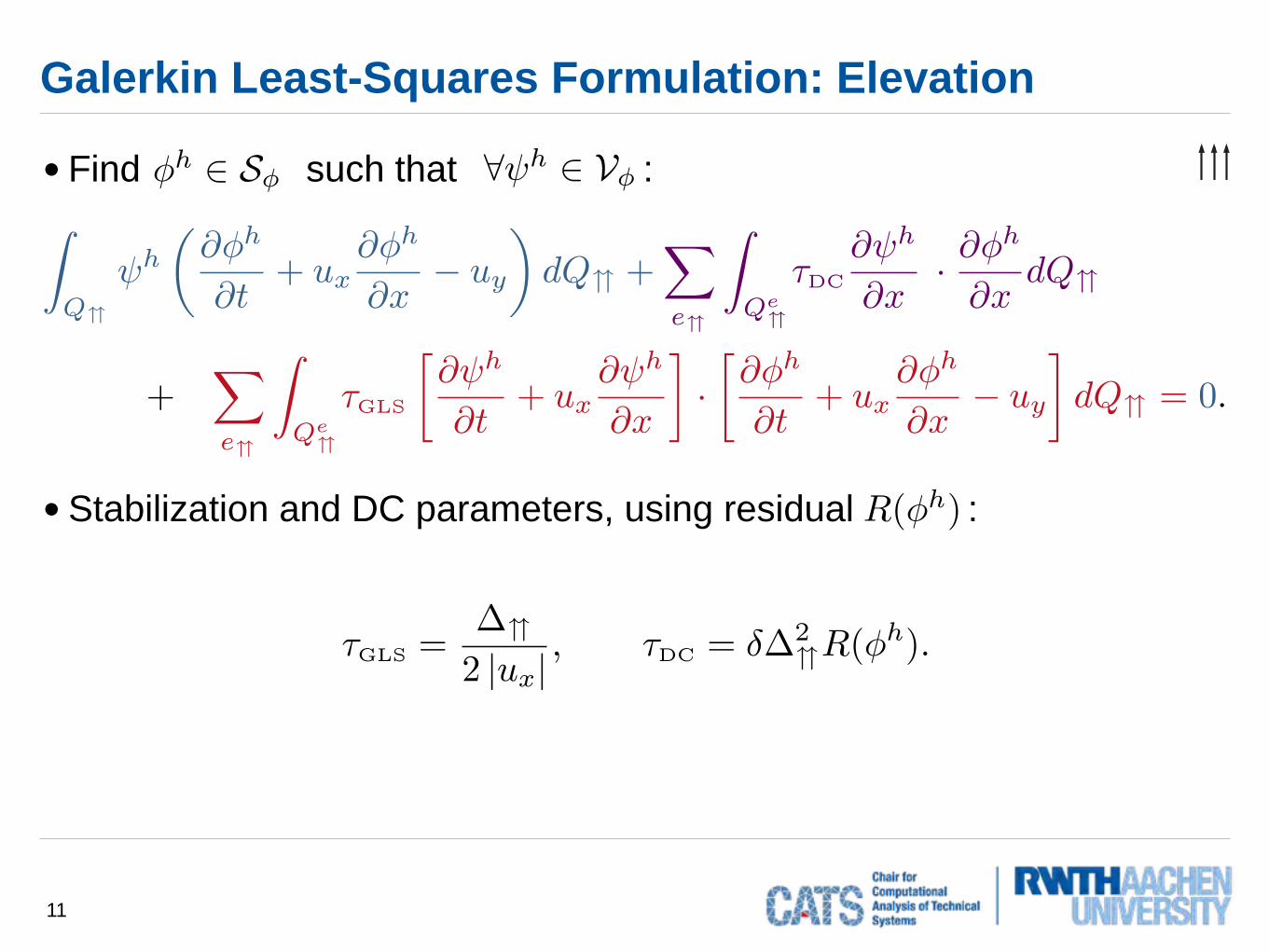
• Find such that :
• Stabilization and DC parameters, using residual :
Example: Flow Past a Circular Bump
12
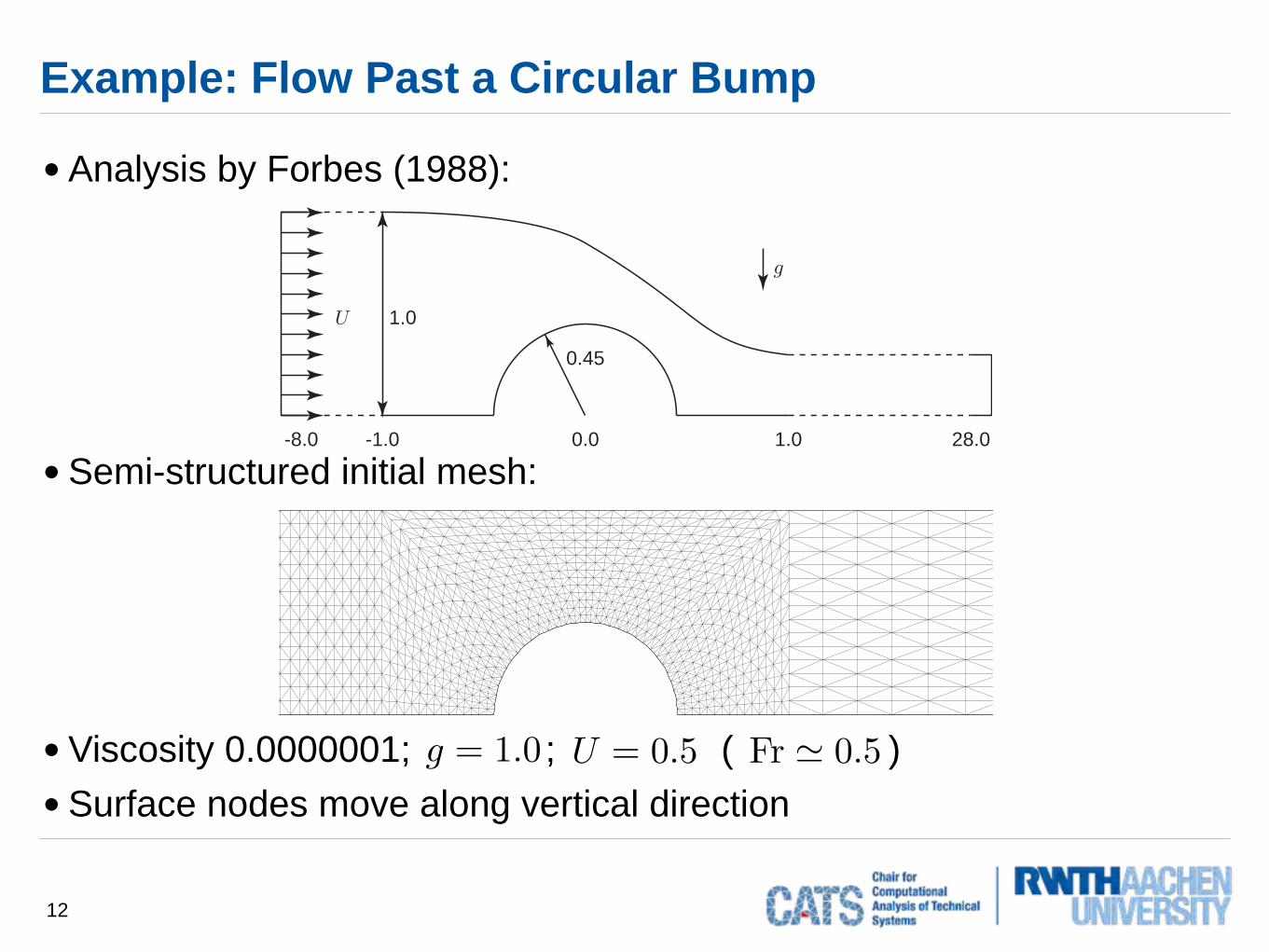
• Analysis by Forbes (1988):
• Semi-structured initial mesh:
• Viscosity 0.0000001; ; ( ) • Surface nodes move along vertical direction
-1.0-8.0
1.0U
g
28.01.00.0
0.45
Example: Flow Past a Circular Bump
13
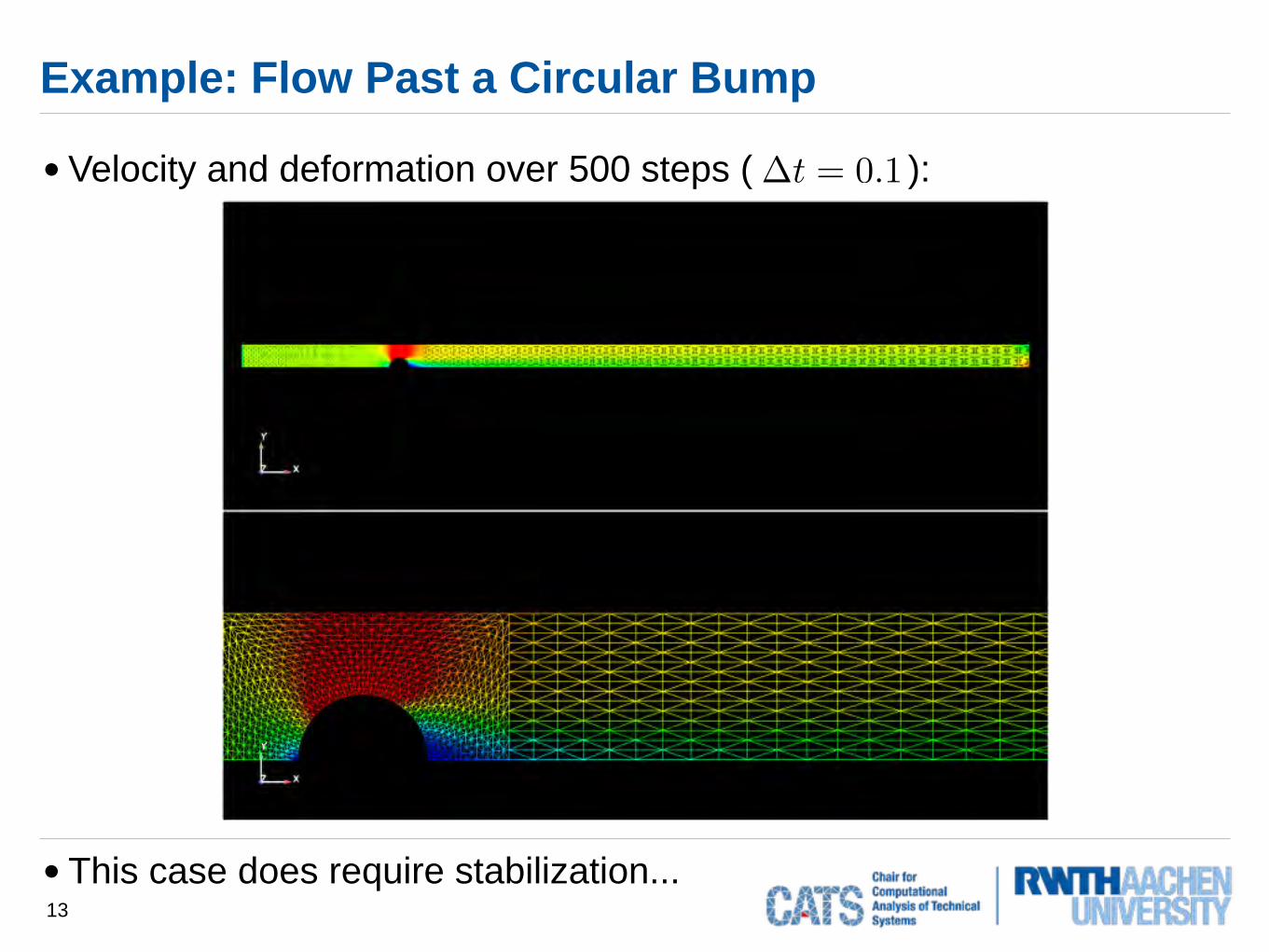
• Velocity and deformation over 500 steps ( ):
• This case does require stabilization...
Example: Flow Past a Circular Bump
14
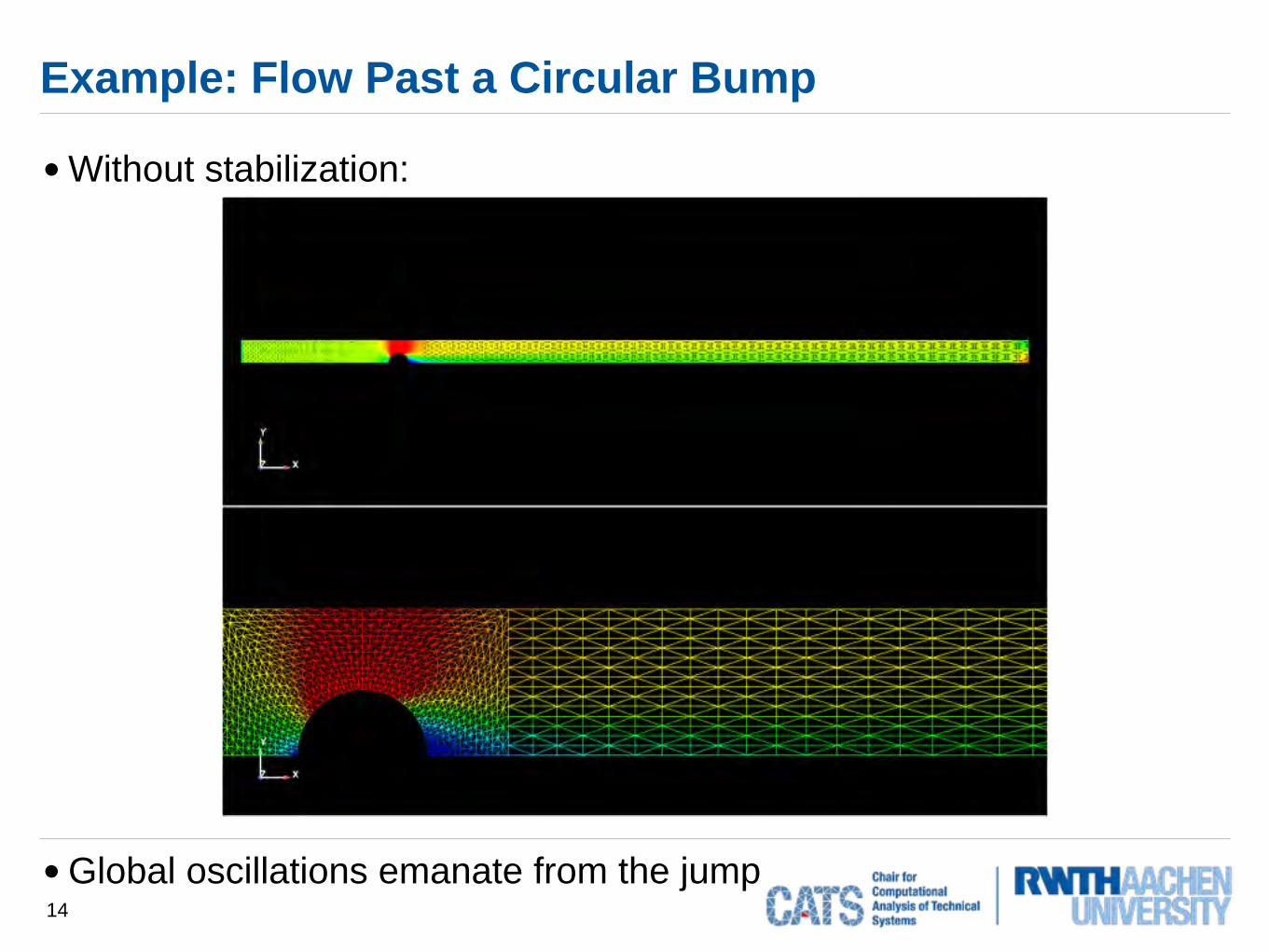
• Without stabilization:
• Global oscillations emanate from the jump
Example: Olmsted Dam
15
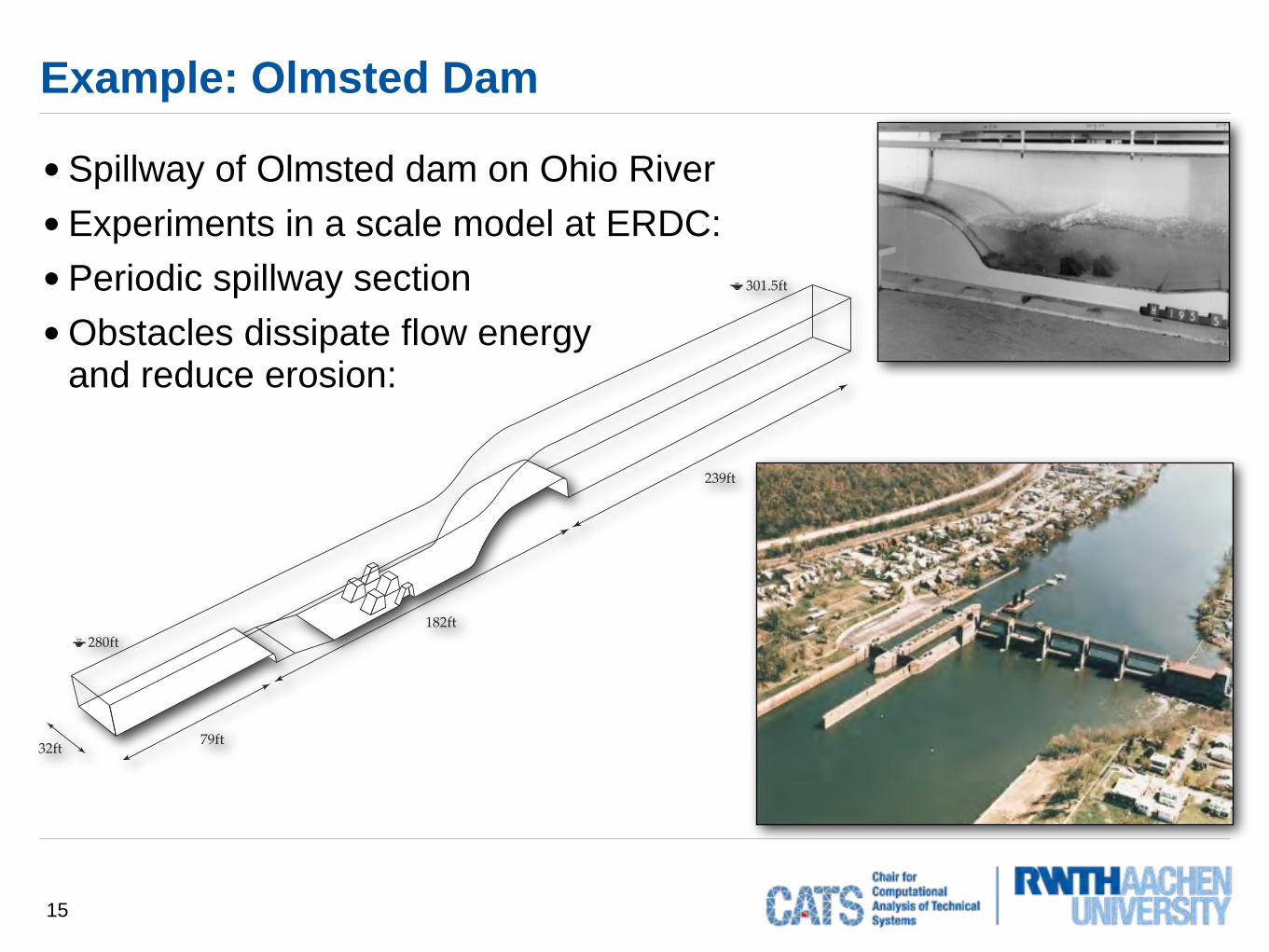
• Spillway of Olmsted dam on Ohio River • Experiments in a scale model at ERDC: • Periodic spillway section • Obstacles dissipate flow energy
and reduce erosion:
32ft
239ft
182ft
79ft
280ft
301.5ft
Example: Olmsted Dam
16
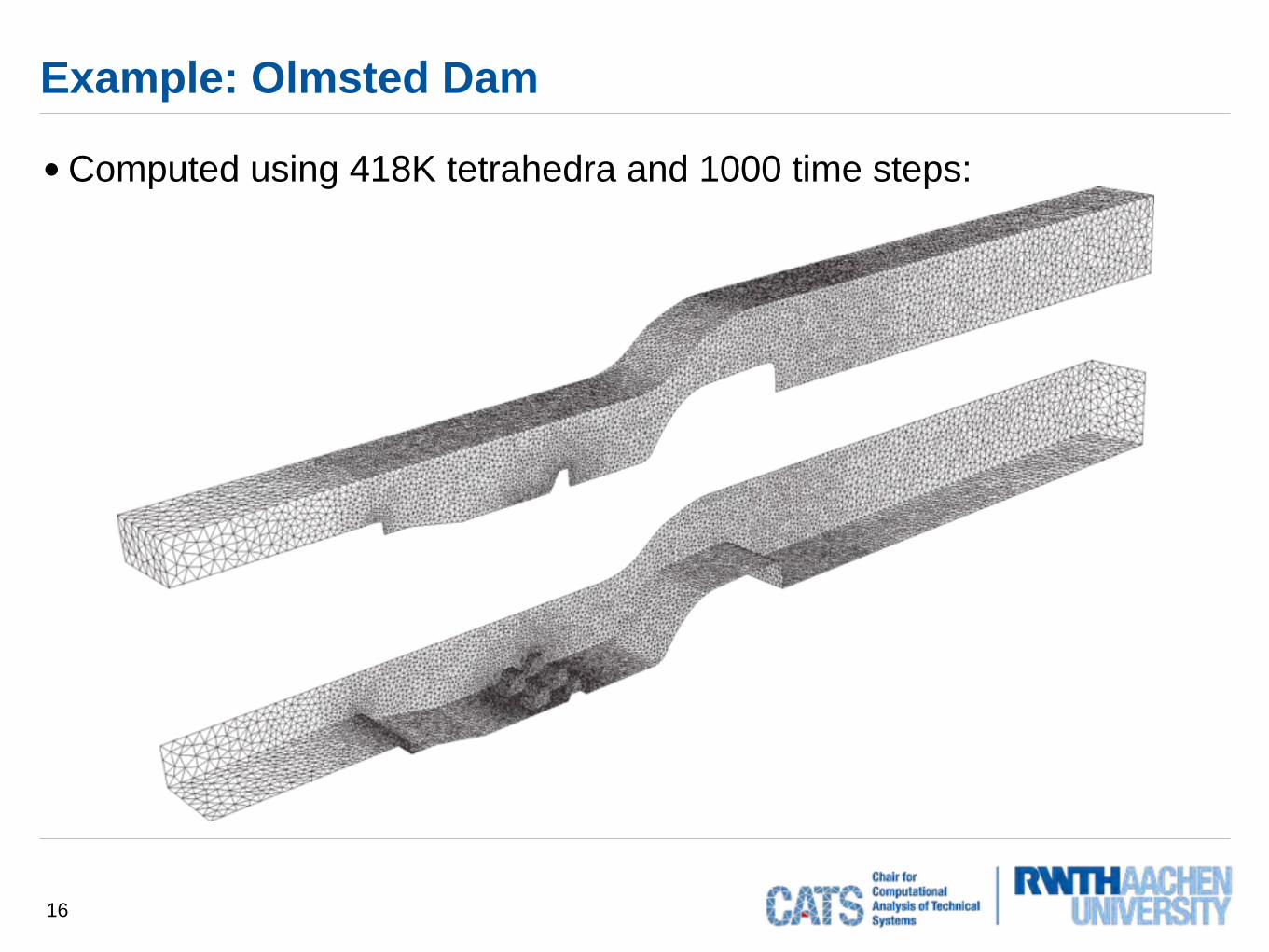
• Computed using 418K tetrahedra and 1000 time steps:
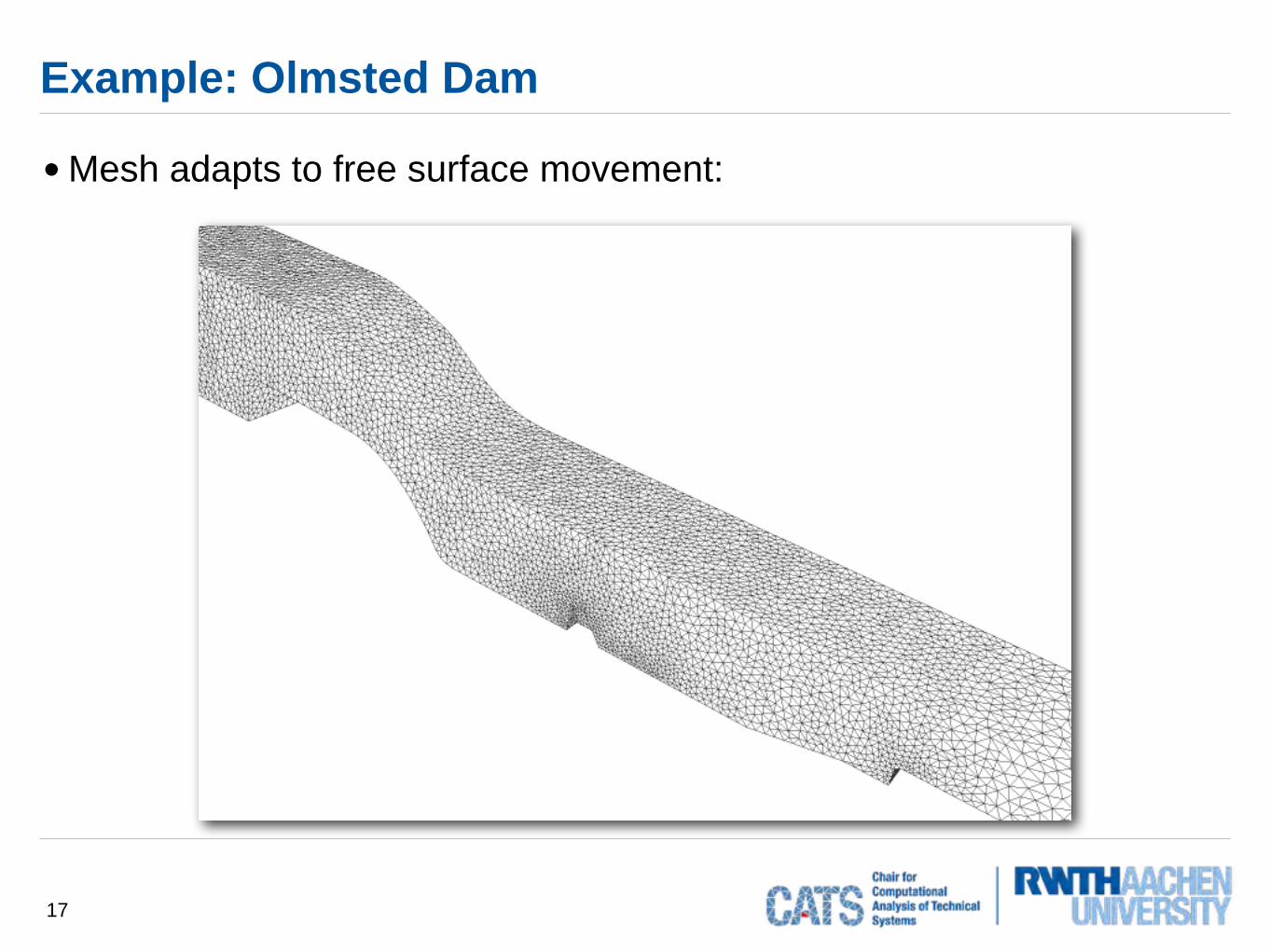
Example: Olmsted Dam
17
• Mesh adapts to free surface movement:
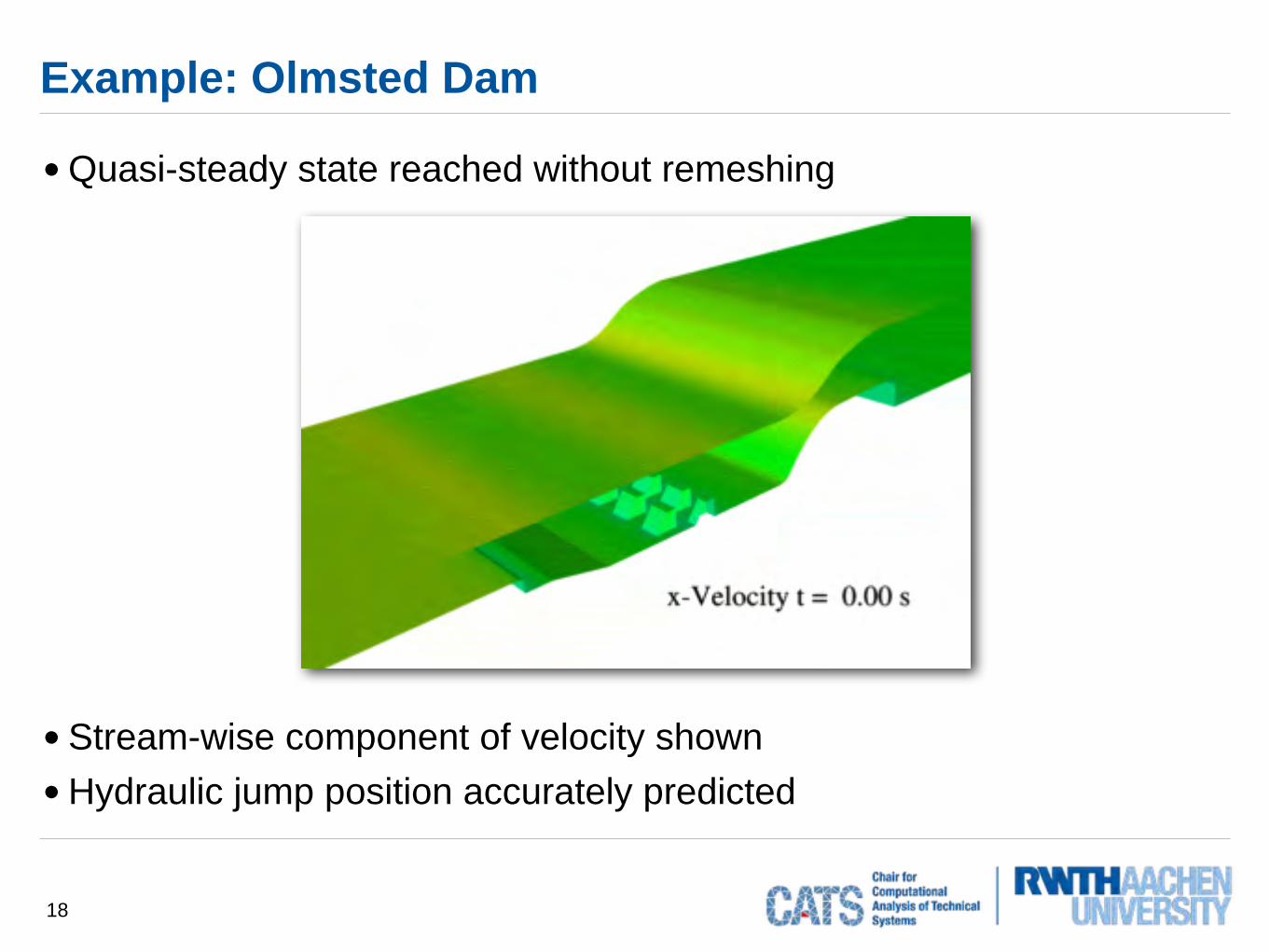
Example: Olmsted Dam
18
• Quasi-steady state reached without remeshing
• Stream-wise component of velocity shown • Hydraulic jump position accurately predicted
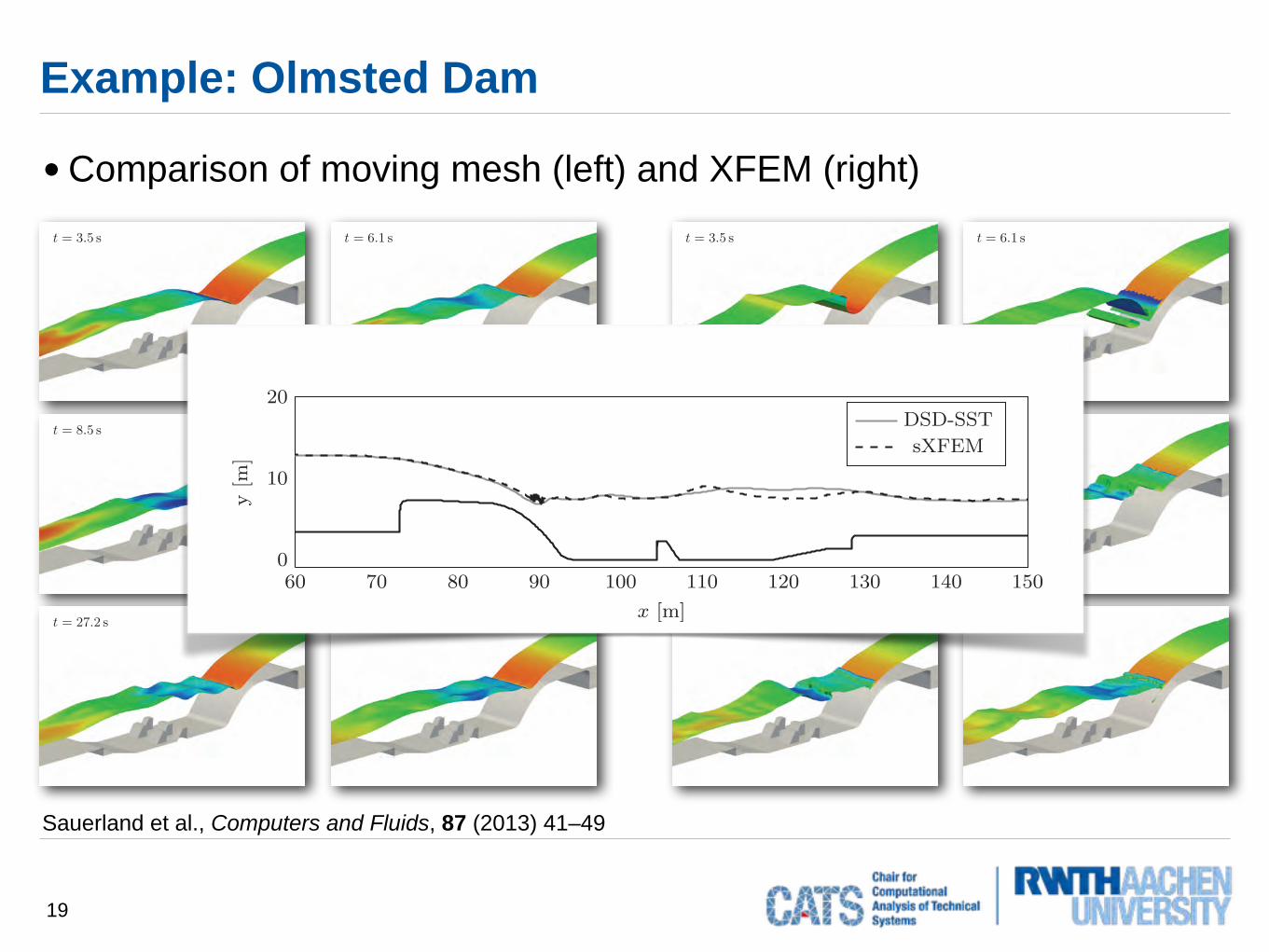
Example: Olmsted Dam
19
• Comparison of moving mesh (left) and XFEM (right)t = 3.5 s t = 6.1 s
t = 8.5 s t = 11.6 s
t = 27.2 s t = 36.1 s
t = 3.5 s t = 6.1 s
t = 8.5 s t = 11.6 s
t = 27.2 s t = 36.1 s
60 70 80 90 100 110 120 130 140 1500
10
20
x [m]
y[m
]
DSD-SST
sXFEM
Sauerland et al., Computers and Fluids, 87 (2013) 41–49
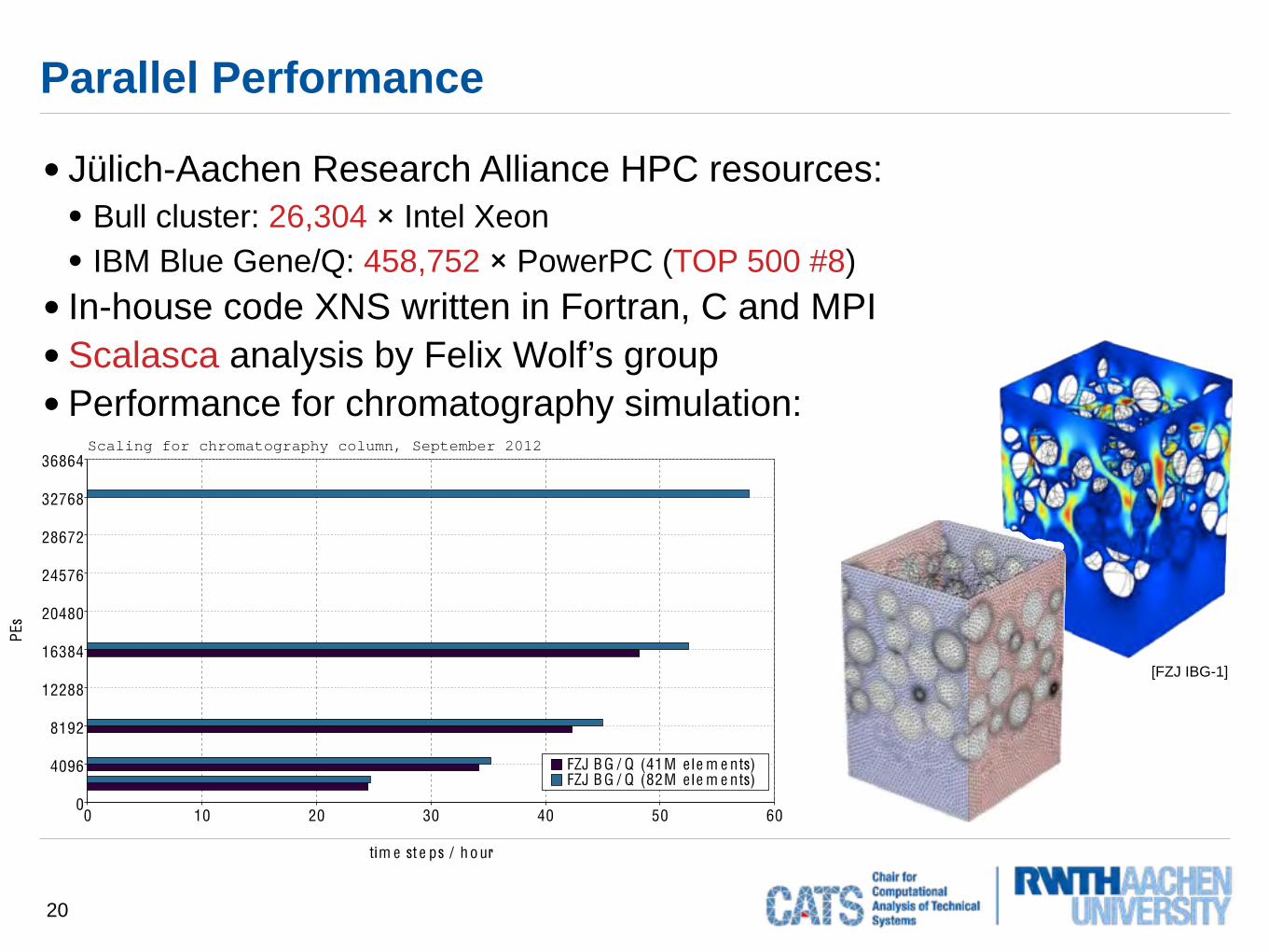
Parallel Performance
20
• Jülich-Aachen Research Alliance HPC resources: • Bull cluster: 26,304 × Intel Xeon • IBM Blue Gene/Q: 458,752 × PowerPC (TOP 500 #8)
• In-house code XNS written in Fortran, C and MPI • Scalasca analysis by Felix Wolf’s group • Performance for chromatography simulation:
Scaling for chromatography column, September 2012
0 10 20 30 40 50 60
tim e st e ps / h o ur
0
4096
8192
12288
16384
20480
24576
28672
32768
36864
PEs
FZJ B G / Q (41M e l e m e nts)FZJ B G / Q (82M e l e m e nts)
[FZJ IBG-1]
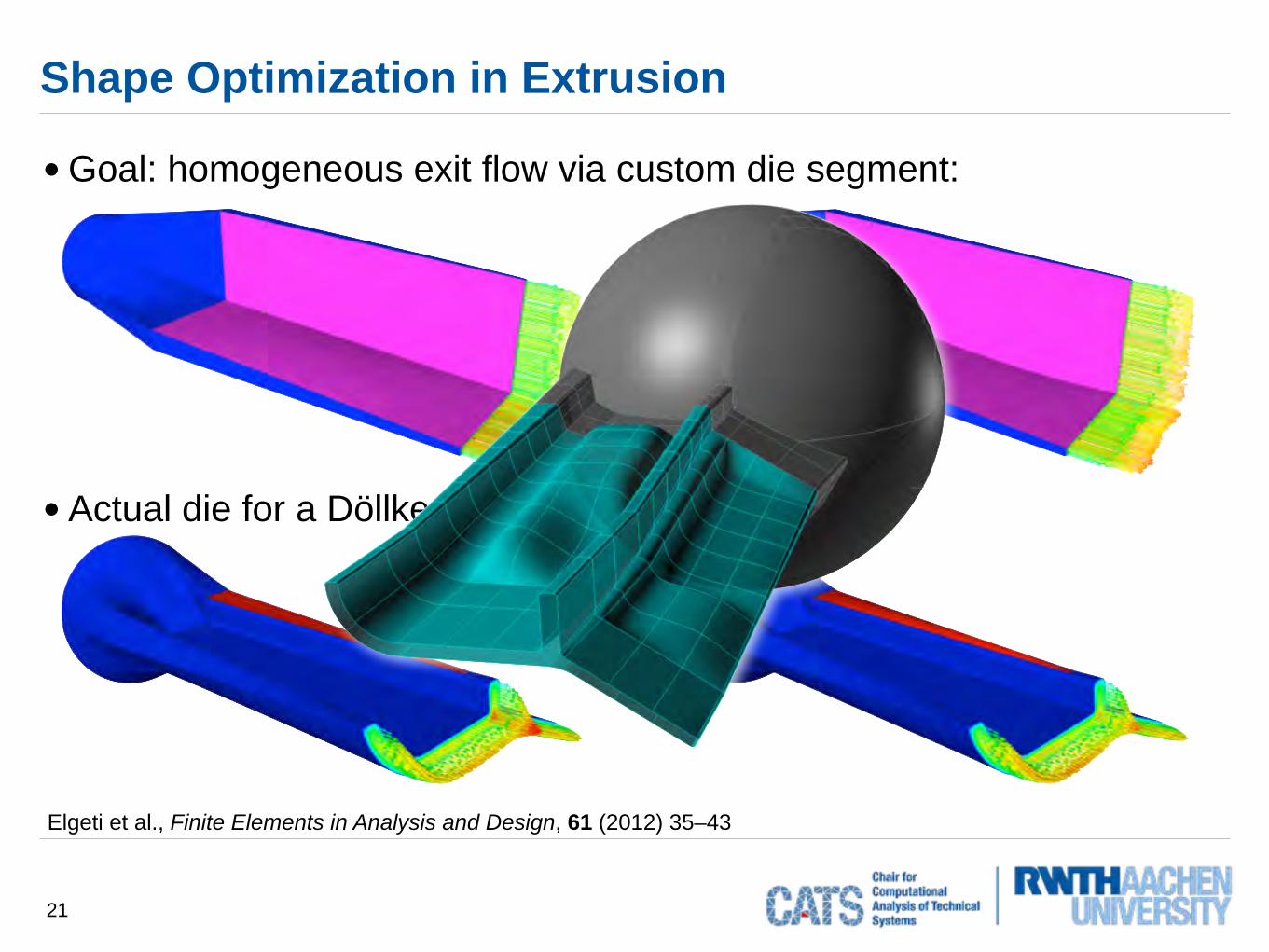
Shape Optimization in Extrusion
• Goal: homogeneous exit flow via custom die segment:
• Actual die for a Döllken seal:
21
Elgeti et al., Finite Elements in Analysis and Design, 61 (2012) 35–43
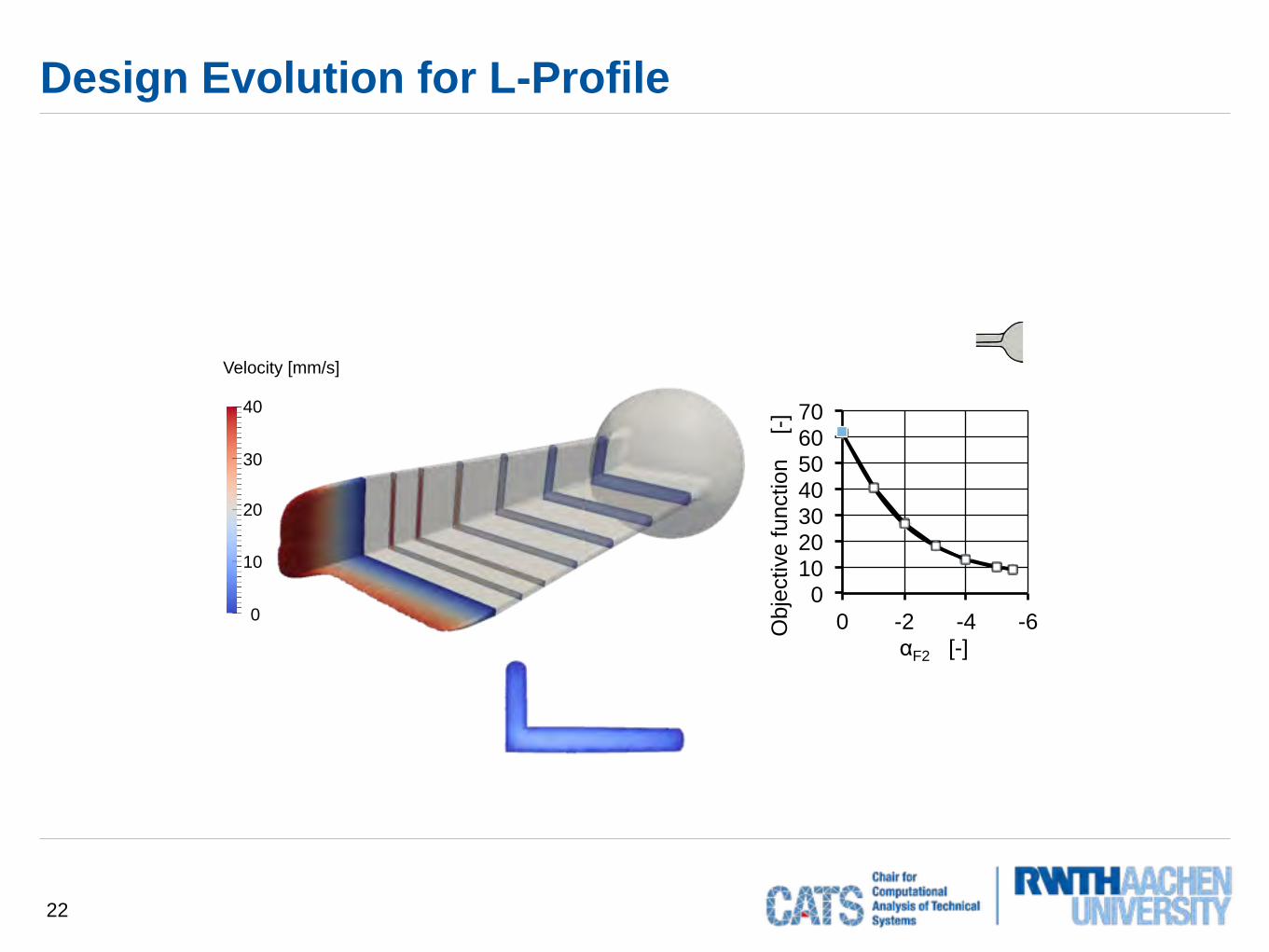
Design Evolution for L-Profile
22
0 10 20 30 40 50 60 70
-6 -4 -2 0 Obj
ectiv
e fu
nctio
n
[-]
αF2 [-]
40
30
20
10
0
Velocity [mm/s]
23
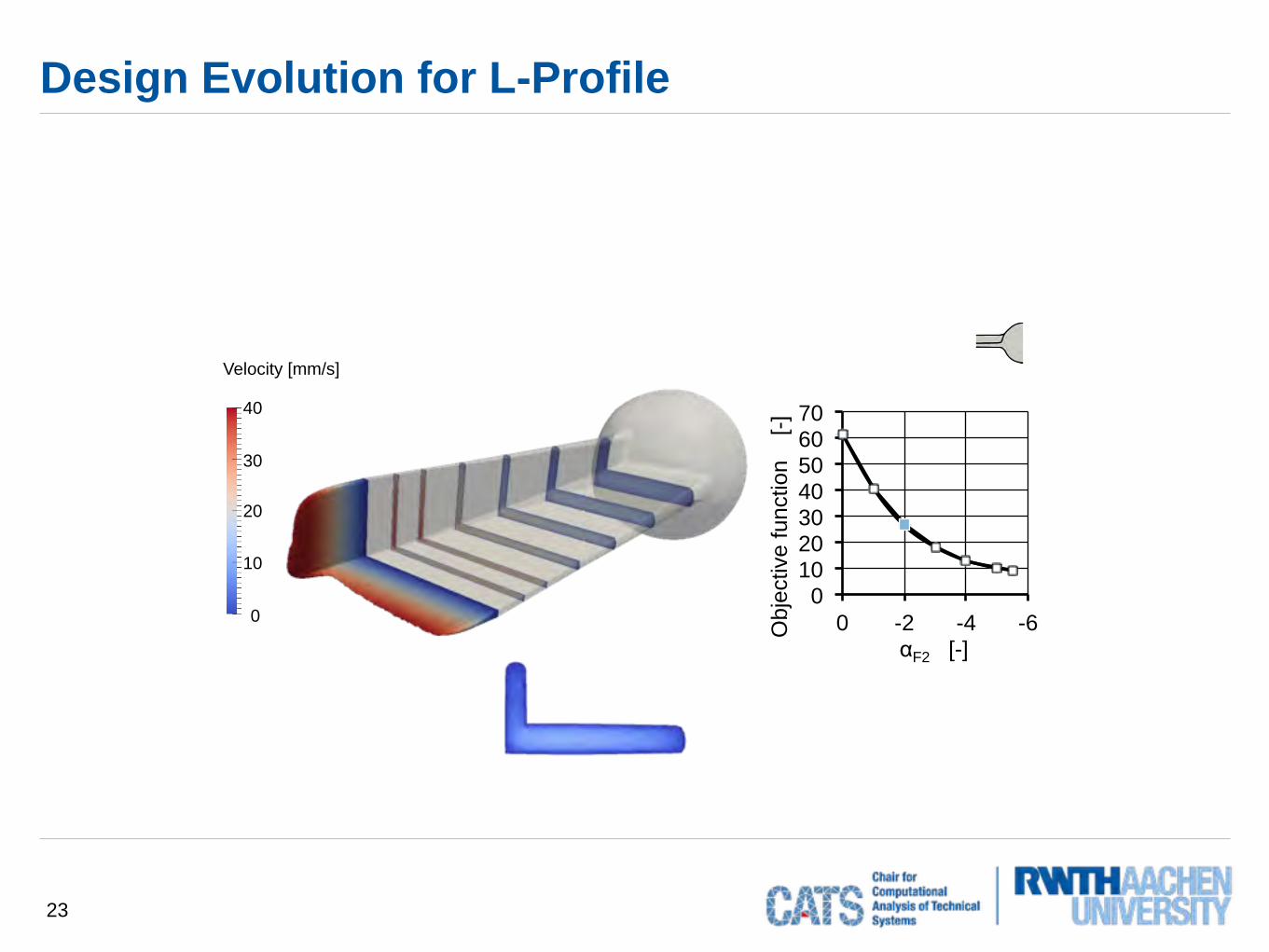
0 10 20 30 40 50 60 70
-6 -4 -2 0 Obj
ectiv
e fu
nctio
n
[-]
αF2 [-]
40
30
20
10
0
Velocity [mm/s]
Design Evolution for L-Profile
24
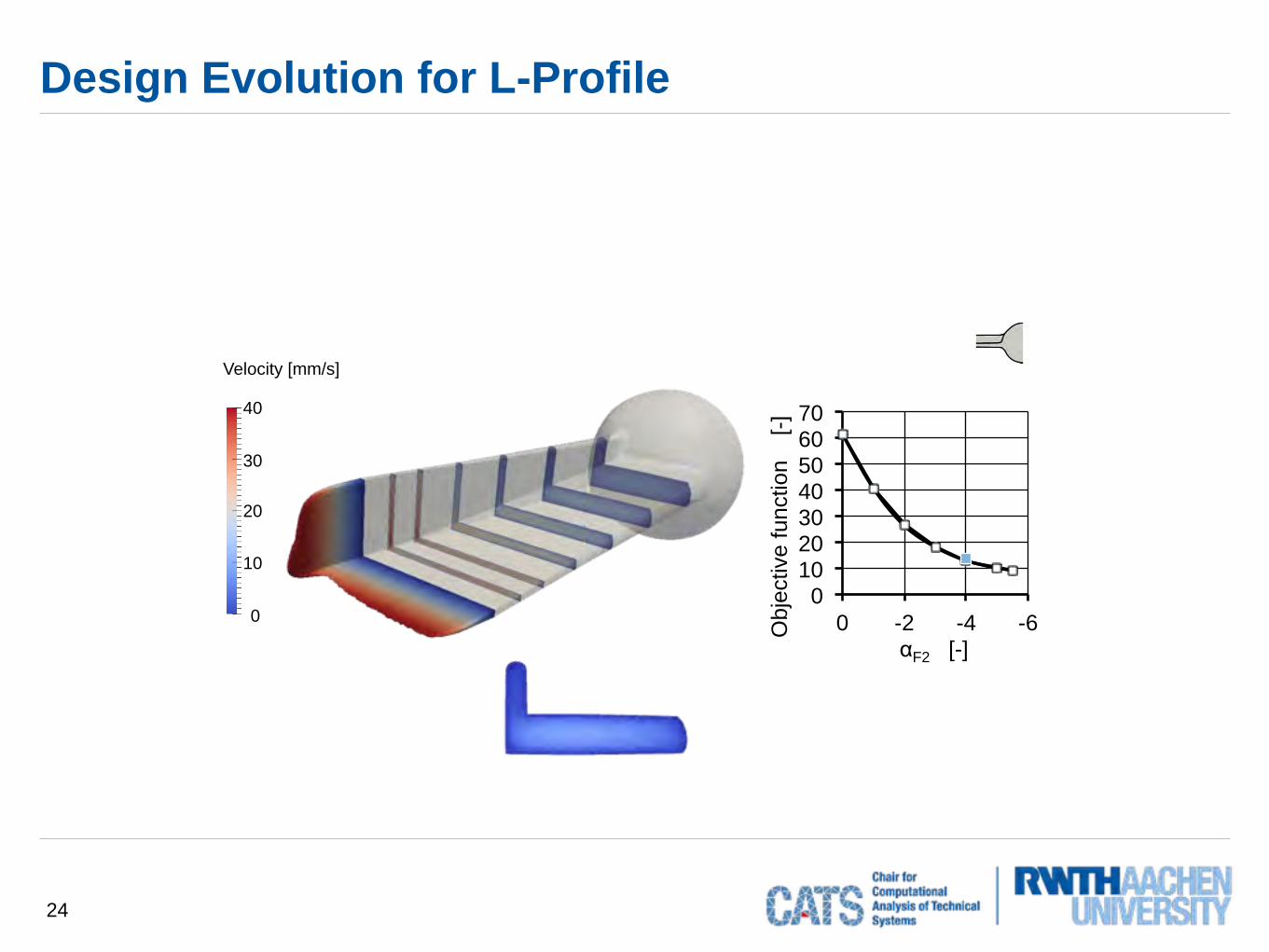
0 10 20 30 40 50 60 70
-6 -4 -2 0 Obj
ectiv
e fu
nctio
n
[-]
αF2 [-]
40
30
20
10
0
Velocity [mm/s]
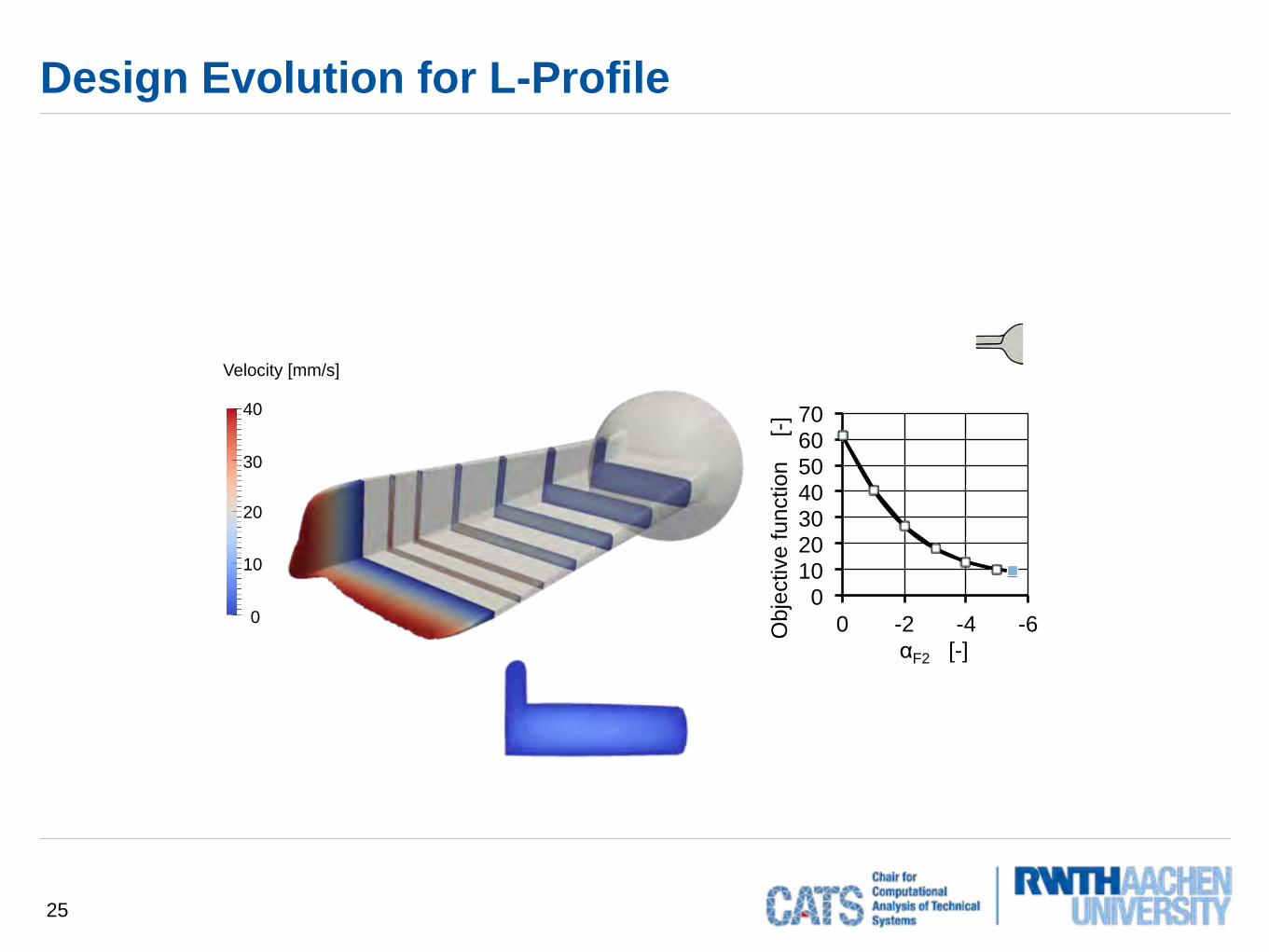
Design Evolution for L-Profile
25
0 10 20 30 40 50 60 70
-6 -4 -2 0 Obj
ectiv
e fu
nctio
n
[-]
αF2 [-]
40
30
20
10
0
Velocity [mm/s]
Design Evolution for L-Profile
26
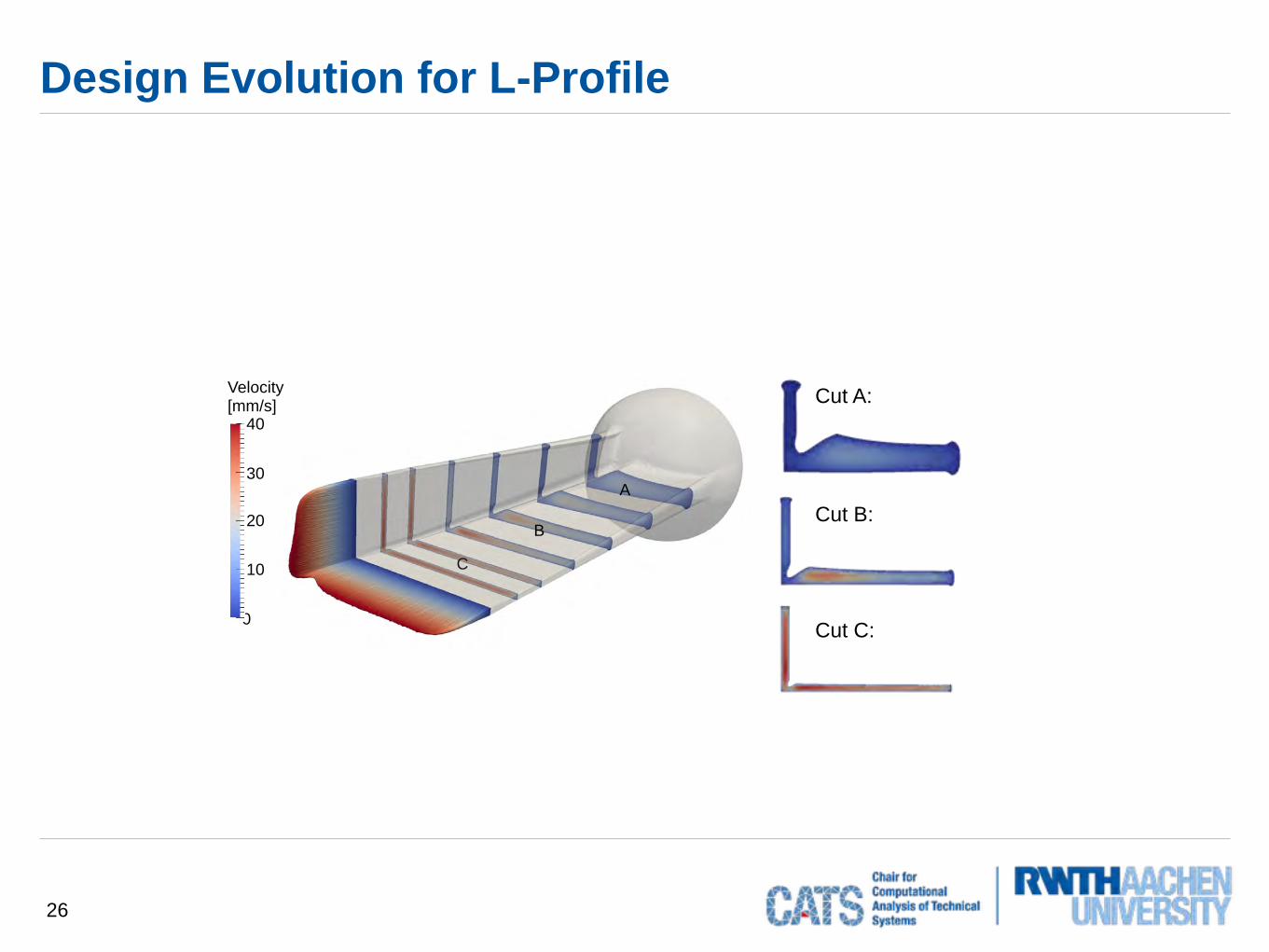
Design Evolution for L-Profile
Cut A:
Cut B:
Cut C:
A
B
C
40
30
20
10
0
Velocity [mm/s]
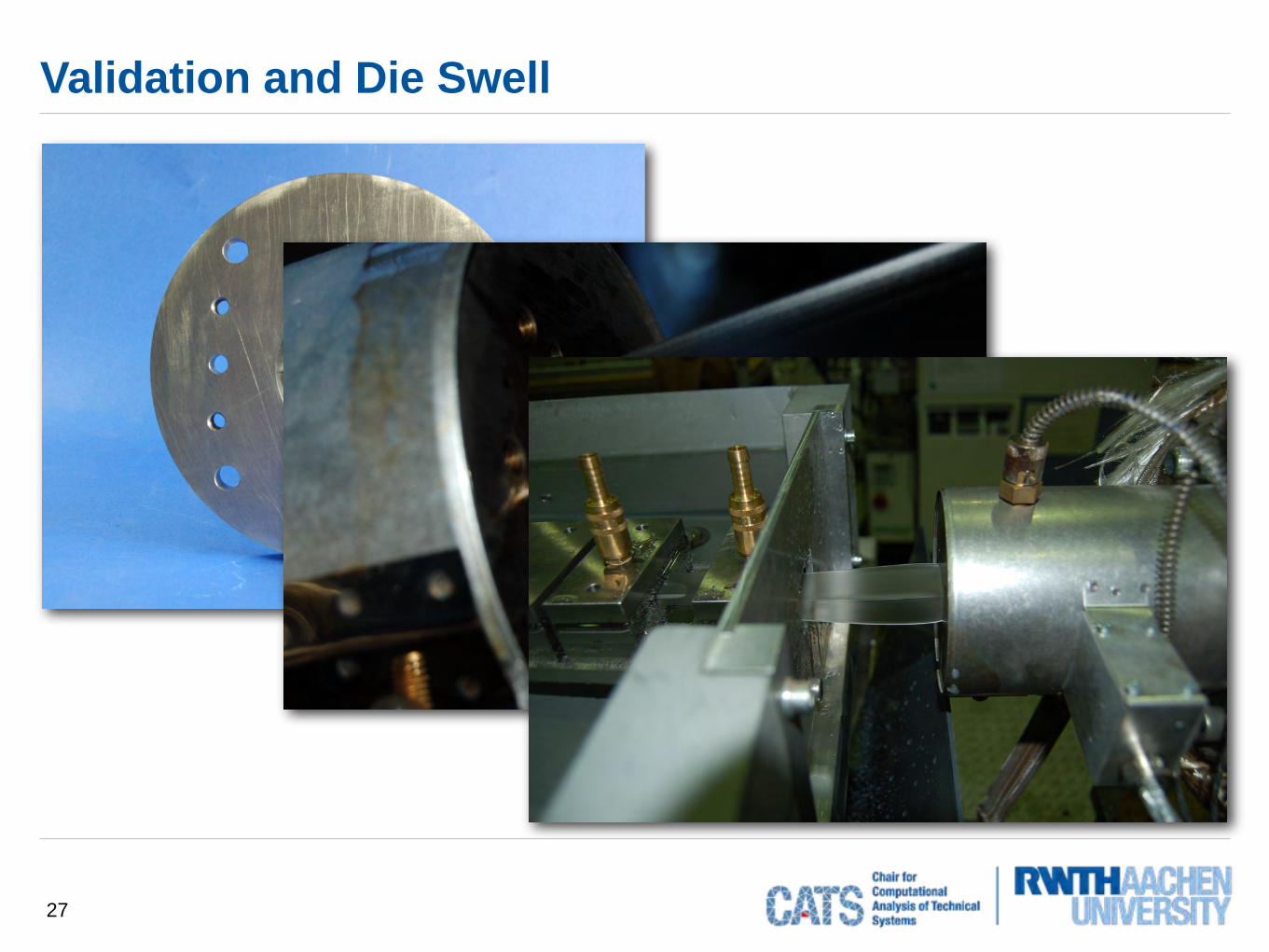
Validation and Die Swell
27
Splines as an Aid in Analysis
28
• Geometry information from NURBS representation of the boundary
• NURBS-enhanced finite element method (Huerta et al.)
• Isogeometric Analysis (Hughes et al.)
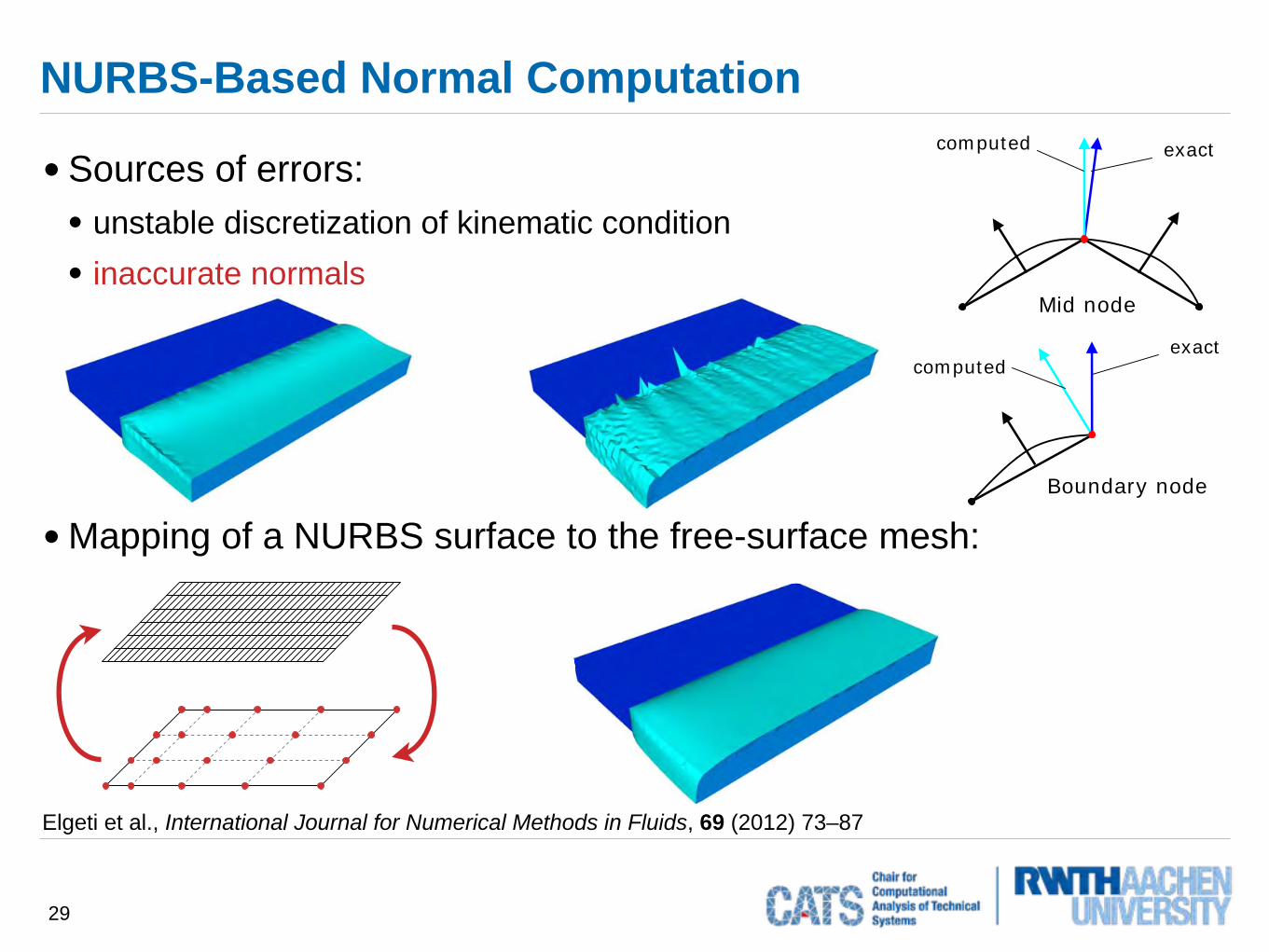
• Sources of errors: • unstable discretization of kinematic condition • inaccurate normals
• Mapping of a NURBS surface to the free-surface mesh:
NURBS-Based Normal Computation
29
21/26
Extension to 3-D
computed exact
Mid node
exactcomputed
Boundary node21/26
Extension to 3-D
computed exact
Mid node
exactcomputed
Boundary node
Elgeti et al., International Journal for Numerical Methods in Fluids, 69 (2012) 73–87
22/26
NURBS Representation
22/26
NURBS Representation
24/26
Die Swell Behind the Slit-Profile
General approach
NURBSrepresentation
24/26
Die Swell Behind the Slit-Profile
General approach
NURBSrepresentation
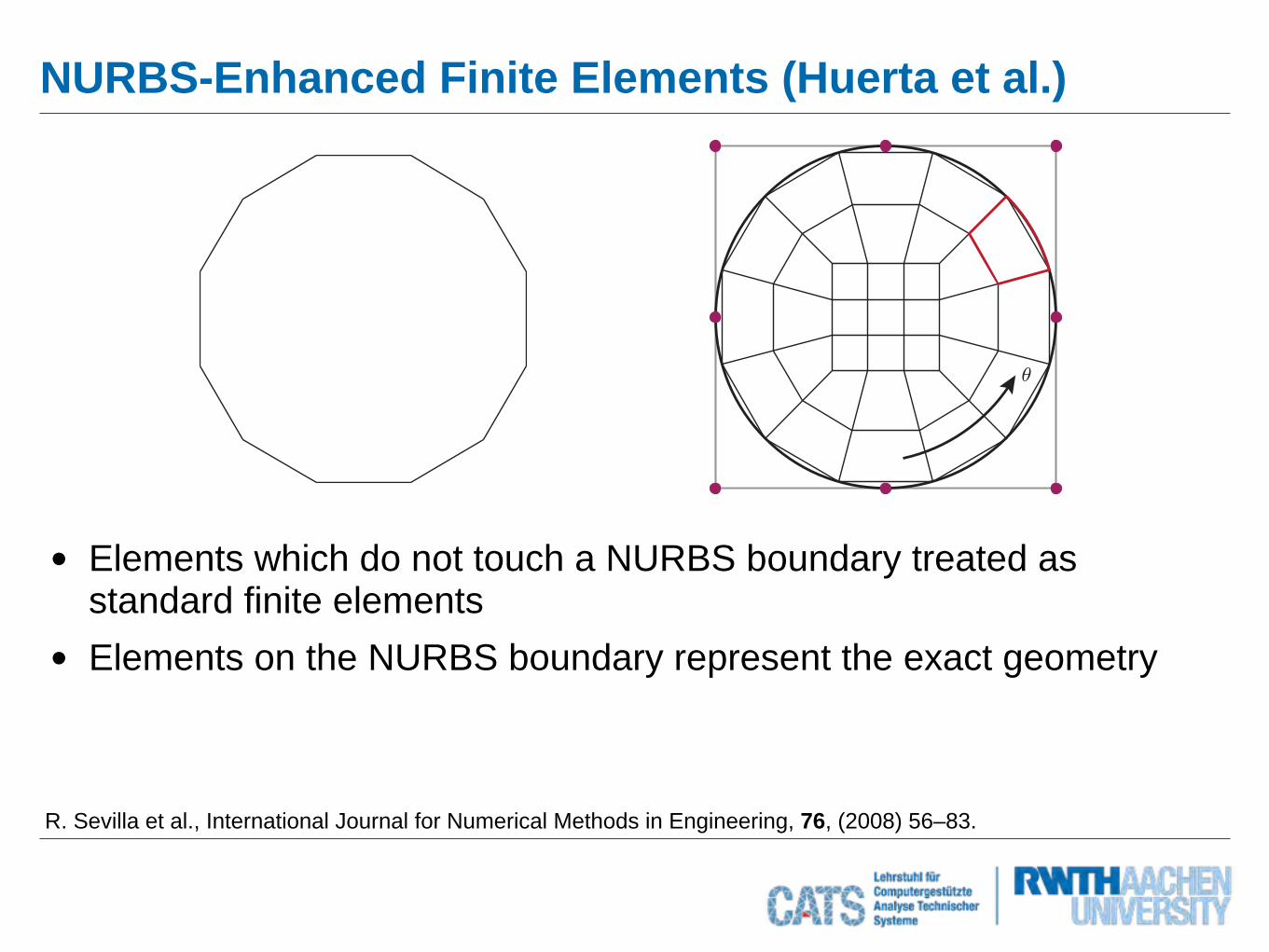
NURBS-Enhanced Finite Elements (Huerta et al.)
• Elements which do not touch a NURBS boundary treated as standard finite elements
• Elements on the NURBS boundary represent the exact geometry
R. Sevilla et al., International Journal for Numerical Methods in Engineering, 76, (2008) 56–83.
θ
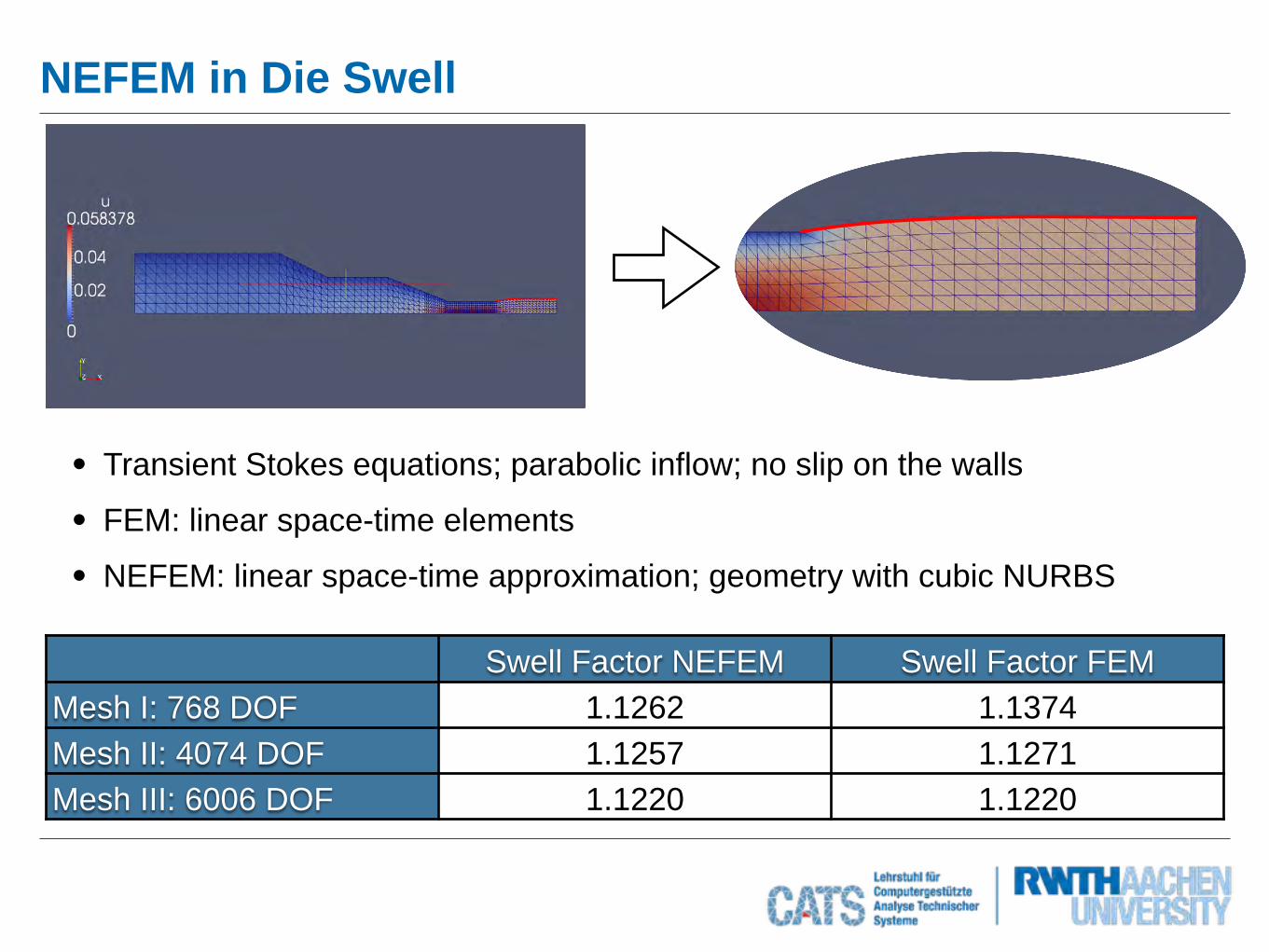
• Transient Stokes equations; parabolic inflow; no slip on the walls
• FEM: linear space-time elements
• NEFEM: linear space-time approximation; geometry with cubic NURBS
NEFEM in Die Swell
Swell Factor NEFEM Swell Factor FEMMesh I: 768 DOF 1.1262 1.1374Mesh II: 4074 DOF 1.1257 1.1271Mesh III: 6006 DOF 1.1220 1.1220
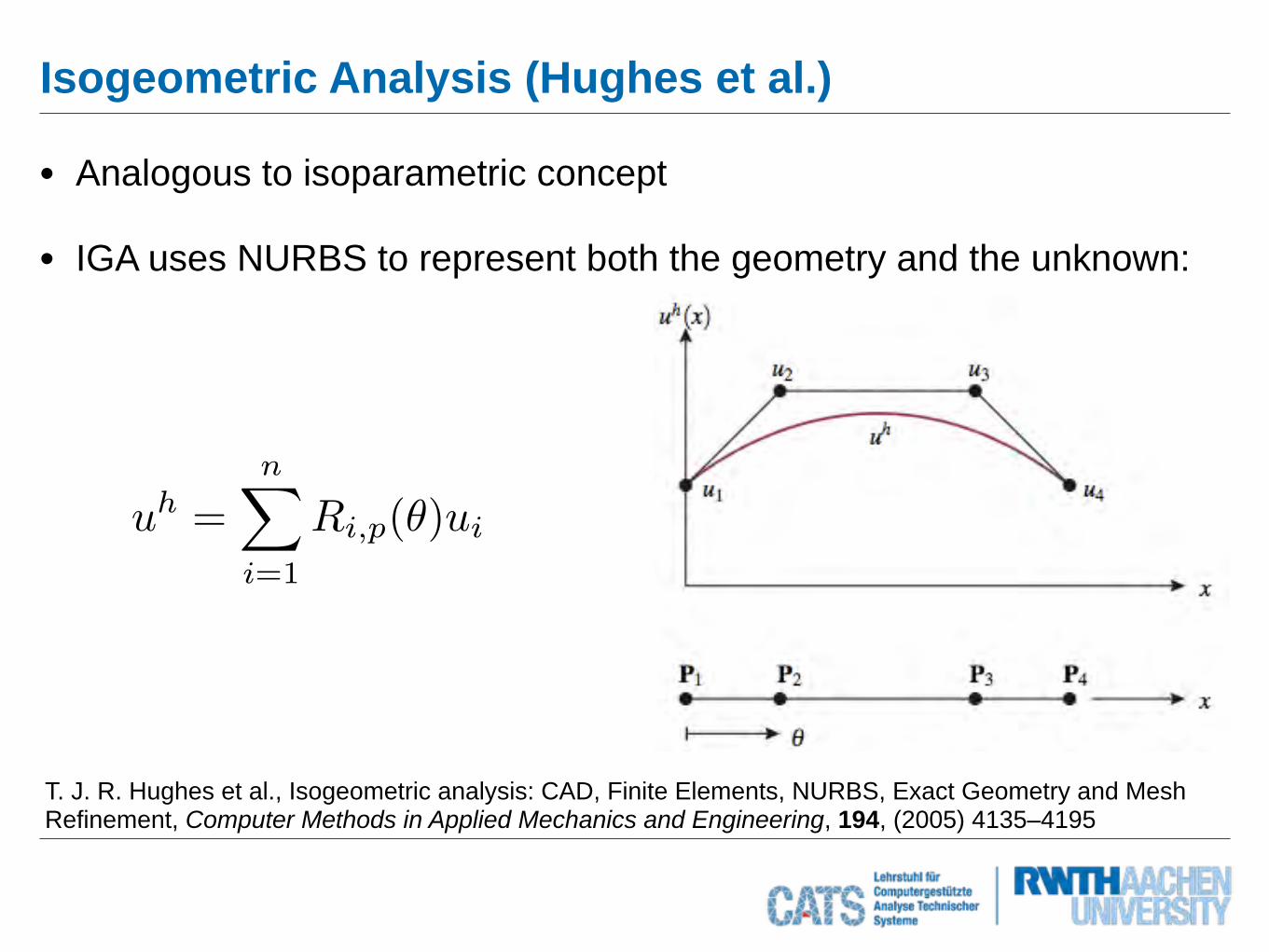
• Analogous to isoparametric concept
• IGA uses NURBS to represent both the geometry and the unknown:
Isogeometric Analysis (Hughes et al.)
uh =nX
i=1
Ri,p(✓)ui
T. J. R. Hughes et al., Isogeometric analysis: CAD, Finite Elements, NURBS, Exact Geometry and Mesh Refinement, Computer Methods in Applied Mechanics and Engineering, 194, (2005) 4135–4195
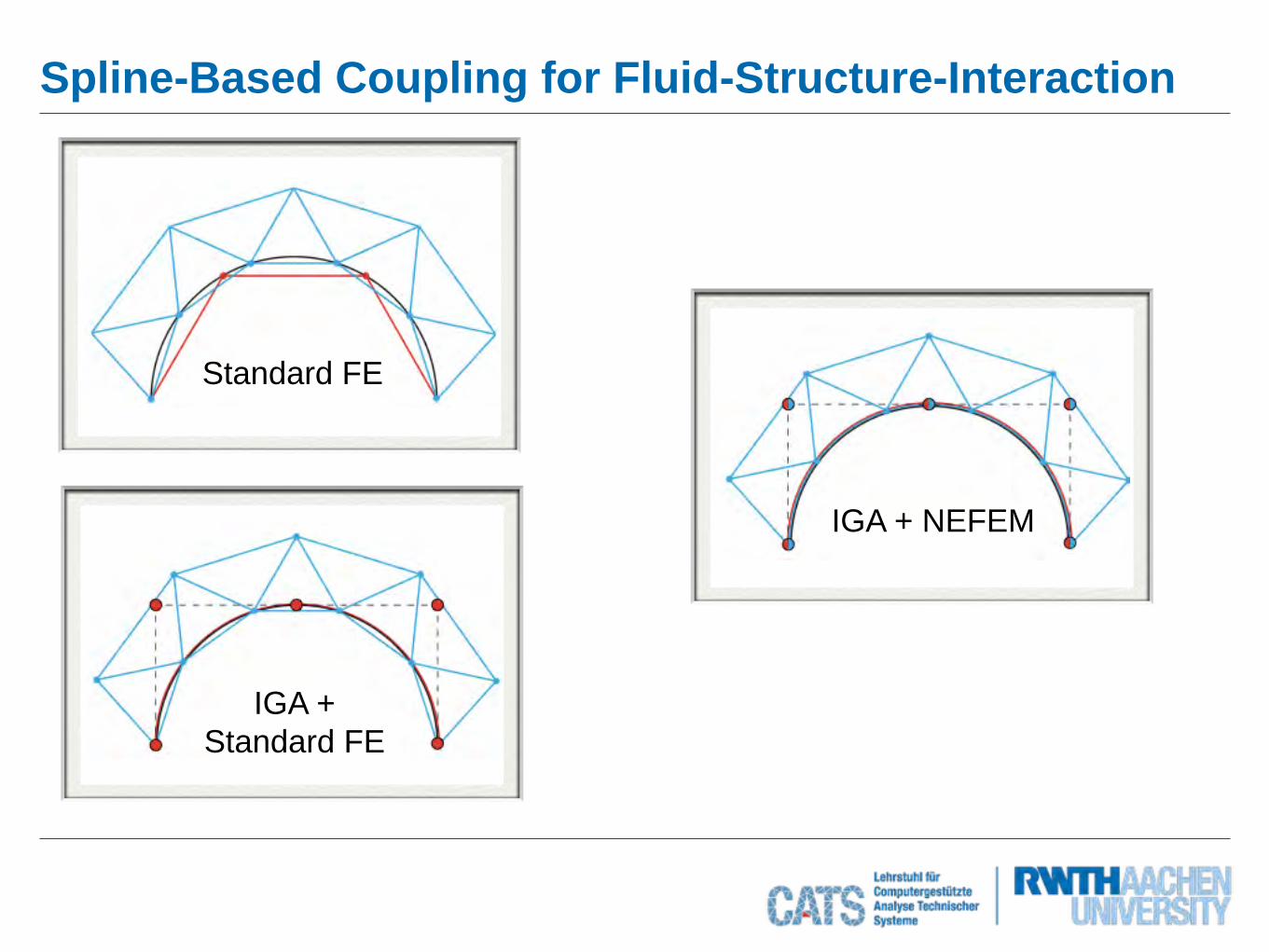
Spline-Based Coupling for Fluid-Structure-Interaction
Standard FE
IGA + Standard FE
IGA + NEFEM
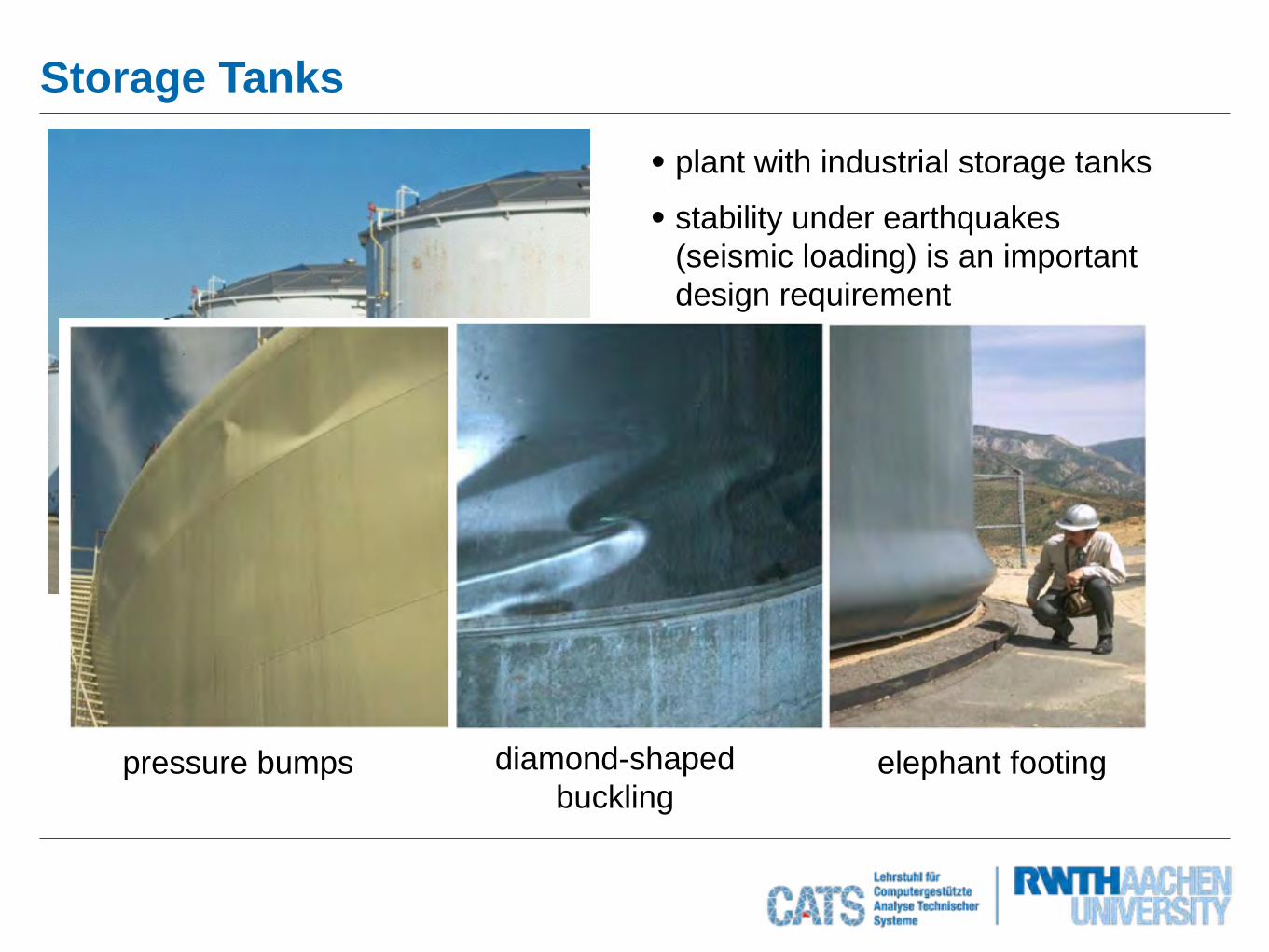
Storage Tanks
• plant with industrial storage tanks
• stability under earthquakes (seismic loading) is an important design requirement
diamond-shaped buckling
elephant footing pressure bumps
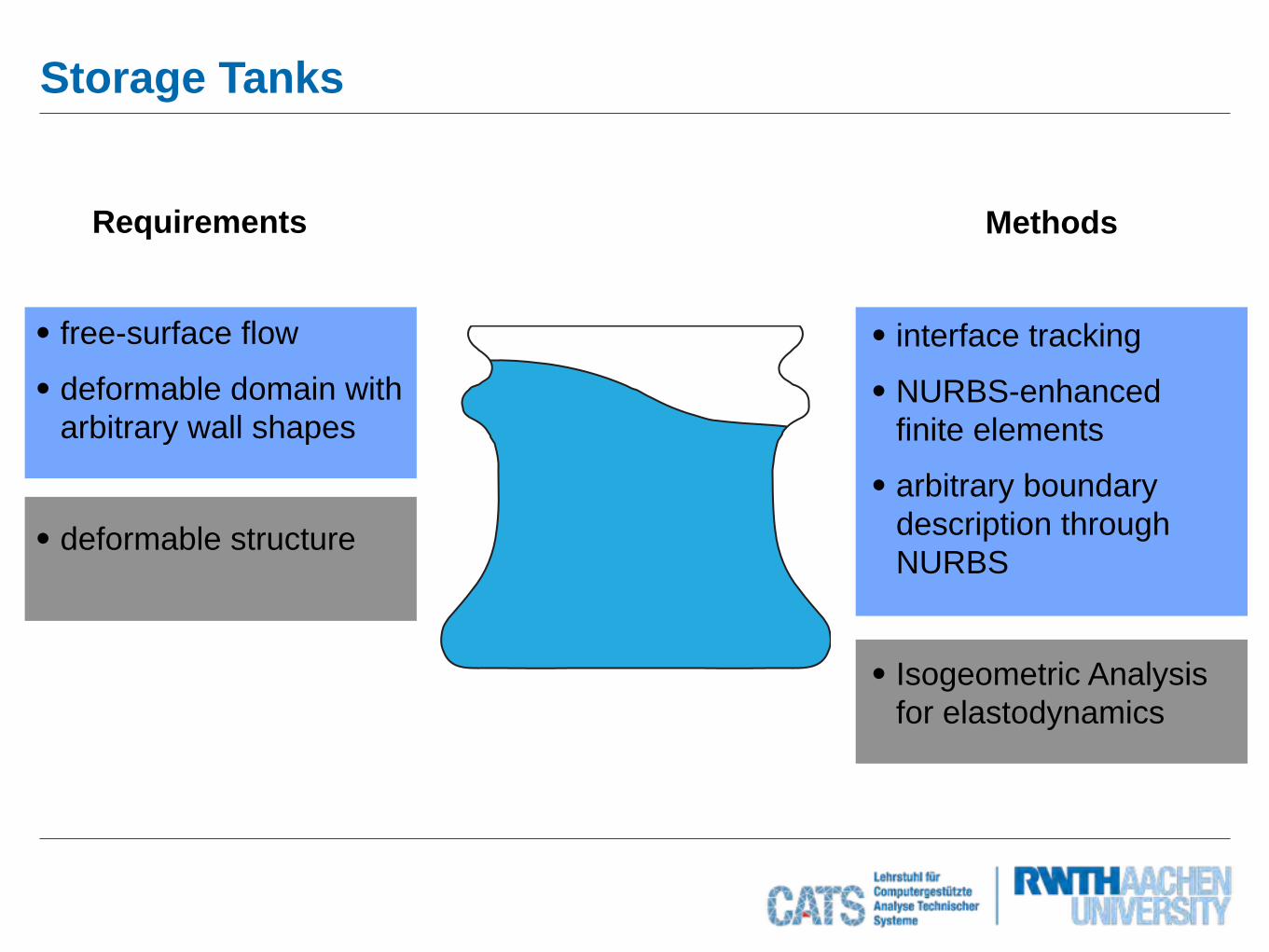
Storage Tanks
• free-surface flow
• deformable domain with arbitrary wall shapes
• deformable structure
• interface tracking
• NURBS-enhancedfinite elements
• arbitrary boundary description through NURBS
• Isogeometric Analysis for elastodynamics
Requirements Methods
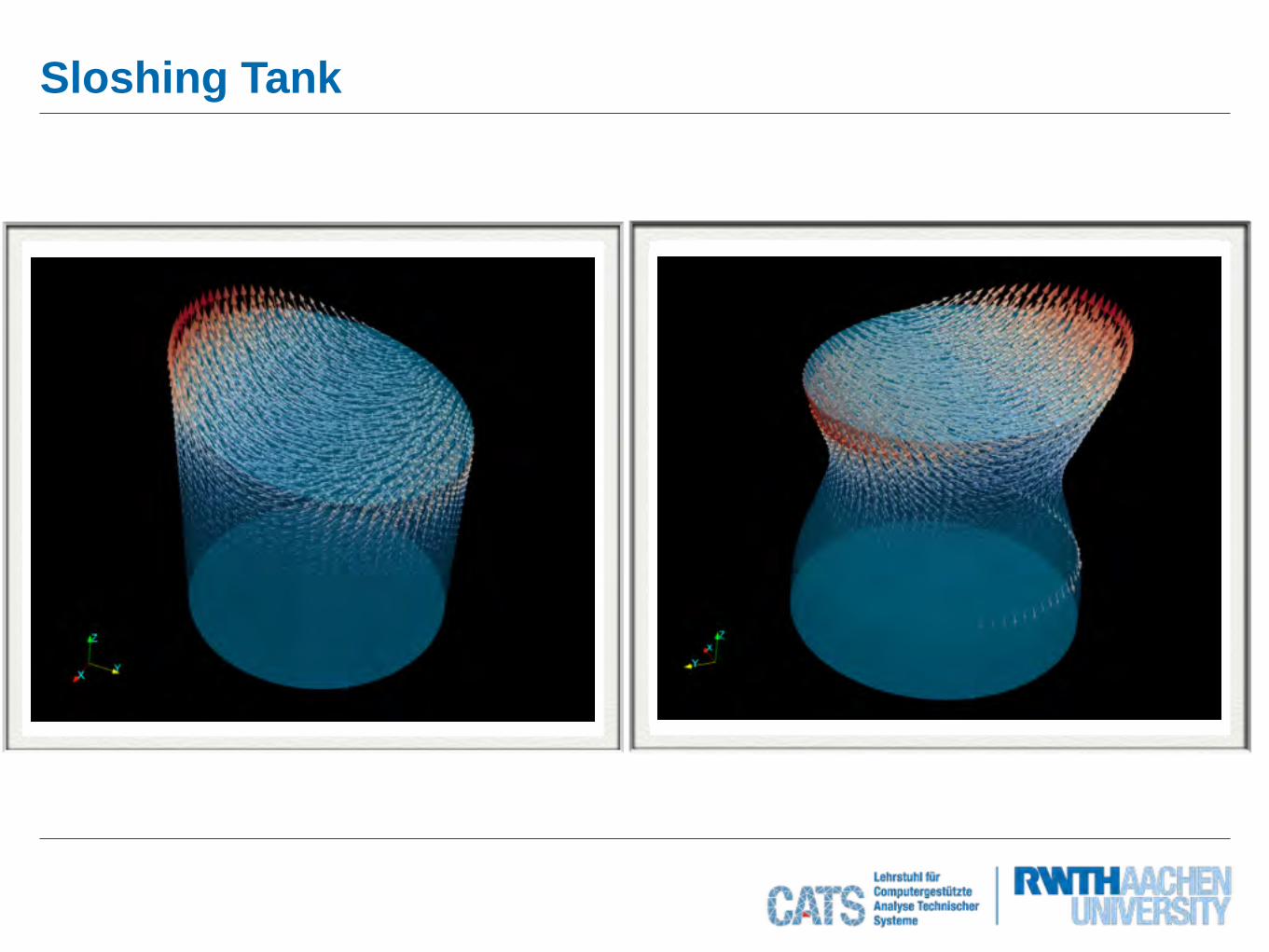
Sloshing Tank
Summary
37
• Coupled deformation and flow • loose coupling • simplified implementation
• Robust free surface tracking • stabilized elevation equation • interface tracking vs. capturing
• Accuracy through NURBS • boundary parametrization • geometry via NEFEM • interpolation via IGA
Acknowledgments
38
• Rice University • Prof. Matteo Pasquali (Chemical Engineering and Chemistry) • Prof. Matthias Heinkenschloss (Computational and Applied Math)
• RWTH Aachen University • Prof. Torsten Kuhlen, Dr. Bernd Hentschel (Virtual Reality) • Prof. Christoph Hopmann, Dr. Christian Windeck (Plastics Processing) • Dr. Stefanie Elgeti, Markus Frings, Norbert Hosters, Philipp Knechtges,
Lutz Pauli, Roland Siegbert (CATS), Atanas Stavrev (AICES) • Forschungszentrum Jülich
• Dr. Eric von Lieres, Andreas Püttmann (Biotechnology) • TU Munich
• Prof. Heiko Briesen (Process Engineering) • TU Darmstadt
• Prof. Christian Bischof (Scientific Computing) • German Research Foundation:
GSC 111, EXC 128, SFB 1120, BE 3689/7, BE 3689/10 • Federal Ministry of Research BMBF and Environment BMU
Save the Date
39
www.yic.rwth-aachen.de July 20–23, 2015



























