-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Table of Contents
Chapter 1 Introduction
Objectives
In this chapter we introduce the field of robotics and look
briefly at some applications.
This background material includes the following topics.
1) Applications of robotics, 2) Robot classification, 3) Robot
structure,
4) Research areas.
1. Introduction
2. Mathematical Preliminaries
3. Kinematics
4. Inverse Kinematics
5. Dynamics
6. Control
7. Mobile Robots
8. Intelligent Robots
1.1 Introduction
1.2 Applications of Robots
1.3 Robot Classification
1.4 Robot Structure
1.5 Research Areas
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
1.1 Introduction
History of the word Robot The word Robot was first used in 1921
by the Czech
playwriter Karel Capek in his SF drama entitled R.U.R.
(Rossums Universal Robots).
It is derived from the Czech word robota.
(slave laborer, forced labor).
Karel apek(1890-1938)
Czech writer
A scene from Karel apeks 1920 play R.U.R. ),
showing three robots
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
What is a robot? Reprogrammable general-purpose entity with
external sensors.
Software controllable mechanical device that uses sensors to
guide
one or more end effectors through programmed motions in a
workspace in order to manipulate physical objects.
From practical point of view: A robot is a versatile mechanical
device equipped with actuators and sensors under the control of a
computing system.
TOPIO at Tokyo International Robot Exhibition (IREX) 2009.
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
RT (Robot Technology) Fusion Technology
Electrical Eng., Mechanical Eng., Computer Sci.,
Linguistics,
Ethics, Psychology,
IT (Information Technology), BT (Bio Technology), NT (Nano
Technology), MEMS (Micro Electro Mechanical System), etc.
MEMS
IT
NT
BT
Technologies in future or
in your mind
RT Fusion Technology
Robot Technology
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
According to the Japanese Industrial Robot Association(JIRA),
Robots are divided into the following classes.
Classes of robots
Class 1
Manual handling device
A device with several
degrees of freedom
actuated by the operator
Class 2
Fixed sequence robot
Handling device which
performs the successive
stages of a task according
to a predetermined,
unchanging method,
which is difficult to
modify
Class 3
Variable sequence robot
The same type of handling
device as in class 2, but the
stages can be modified
easily.
Class 4
Playback robot
The human operator
performs the task
manually by leading or
controlling the robot,
which records the
trajectories.
Class 5
Numerical control robot
The human operator
supplies the robot with a
movement program rather
than teaching it the task
manually.
Class 6
Intelligent robot
A robot with the means to
understand its environment,
and the ability to
successfully complete a
task despite changes in the
surrounding conditions
under which it is to be
performed.
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Roadmap of robots
In 1940s: Master- slave robot (Argonne Natl. Lab)
In 1950s : Programmable Manipulator (George C. Devol) In 1959 :
Industrial robot (The Unimate Robot)
In 1960s : MHT-Feedback System with sensors
In 1970s : Microprocessor based robot In 1974 : T3 (The Tomorrow
Tool) Industrial robot with computer control
In 1979 : SCARA robot (Japan) Assembly Robot
In 1980s : CIM (Computer Integrated Manufacturing) In 1981 :
Direct Drive Robot (Carnegie-Mellon Univ.)
In 1990s : Intelligent Robot In 1999 : Aibo (Artificial
Intelligent Robot, Sony)
In 2000s : Micro(Nano) robot, Network based robot, In 2000 :
Asimo (Honda)
In 2003 : Spirit (Opportunity) (NASA)
In 2006 : Big Dog (Boston Dynamics)
In 2006 : Stickybot (Stanford University)
In 2010s : Cloud Robot, Evolutionary Robot, ?
In 2100s : ?
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Service
robot
Auto
guided
vehicle
(AGV)
Free ranging
mobile robot
Entertainment
robot
Human
guided
vehicle
Human
guided
robot
Industrial robot
Museum
tour robot
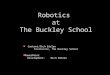
2000
1985
1995
1990
1962
2003
1980
Intelligent/Agent
robot
2010 ~
Industrial
Robot
Service
Robot
Intelligent
Robot
Trends of robot technology 1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Ministry of Information
and Communication
U-IT based
9 Growth
Engines
NG Mobile Comm.
/ Telematics
Digital TV
Broadband /
Home Network
IT SOC
Next Gen. PC
Embedded SW
Digital Contents RFID / USN
Intelligent Robot
Korea
U-IT based 9 Growth Engines, Korea 1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Technical
trends
in robots
Improvements
in System
Technology
Vision
Force sensing
Environment recognition
Others
Human-machine interface
Remote Operation
Others
Off-line Programming
Safety
Multi-robots Cooperation
Others
Improvements
in sensor
technology
Improvements
in
communication Source:
World robotics.org
The demand for robots is expected to rise rapidly due to factors
such as the increase in income, the advent of aging society and the
pursuit of well-being.
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Robotics
Market
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
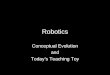
Worldwide robotics Market shares
Applications
(unit : million $) 2009 2012 2015 2020
Industrial Robots 16,450 20,020 25,620 41,250
Professional Service Robots 2,620 9,810 29,760 156,560
Personal Service Robots 9,810 23,260 52,040 222,410
Total 28,880 53,090 107,420 420,220
* Source: World Robotics 2007, IFR / WinterGreen Research, 2008,
etc.
Source: http://servicerobotics.blogspot.com/
How large is the current and future robotics market?
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Examples
Example 1.1.1 What is the difference between Hard automation and
Soft
automation?
Ans: Mass-production assembly lines were first introduced at the
beginning of the
twentieth century(1905) by the Ford Motor Company.
- Hard automation: The machines and processes are more
efficient, but
they have limited flexibility.
- Soft automation: flexible, ex) Programmable mechanical
manipulators.
=> Robot
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Question 1.1.1 What is the difference between robot and
crane?
Review questions
Question 1.1.2 Explain some advantages and possible applications
of master-
slave robot .
Question 1.1.3 Explain why robotics is interdisciplinary.
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Question 1.1.4 Explain the operation of the centrifugal governor
invented by
James Watt.
James Watts centrifugal governor Centrifugal governor in a
Boulton & Watt engine of
1788
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Question 1.1.5 Examine some notable specifications of Asimo in
2011.
1.1 Introduction
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 1940s: Master- slave robot (Argonne Natl. Lab)
Source: http://brl.ee.washington.edu/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 1979 : SCARA robot (Japan) Assembly Robot
Source: http://www.directindustry.com/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 1999: Aibo (Artificial Intelligent Robot, Sony)
Source: http://gizmodo.com/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 2000 : Asimo (Honda)
Source: http://commons.wikimedia.org/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 2006 : Big Dog (Boston Dynamics)
Source: http://www.slipstersblog.com/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
In 2003 : Spirit (Opportunity) (NASA)
Source: http://www.homotron.net/
-
Department of Electrical Eng..
Yeungnam University
Chap. 1 Introduction
Source: http://bdml.stanford.edu/
In 2006 Stickybot(Stanford Univ.)