Embed Size (px)
Citation preview
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 1/15
Chapter 5Trajectory Planning
5.1 INTRODUCTION
In this chapters…….
• Path and trajectory planning means the ay that a ro!ot is
mo"ed
#rom one location to another in a controlled manner.
• The se$%ence o# mo"ements #or a controlled mo"ement
!eteenmotion segment& in straight'line motion or in se$%ential
motions.
• It re$%ires the %se o# !oth (inematics and dynamics o#
ro!ots.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 2/15
Chapter 5Trajectory Planning
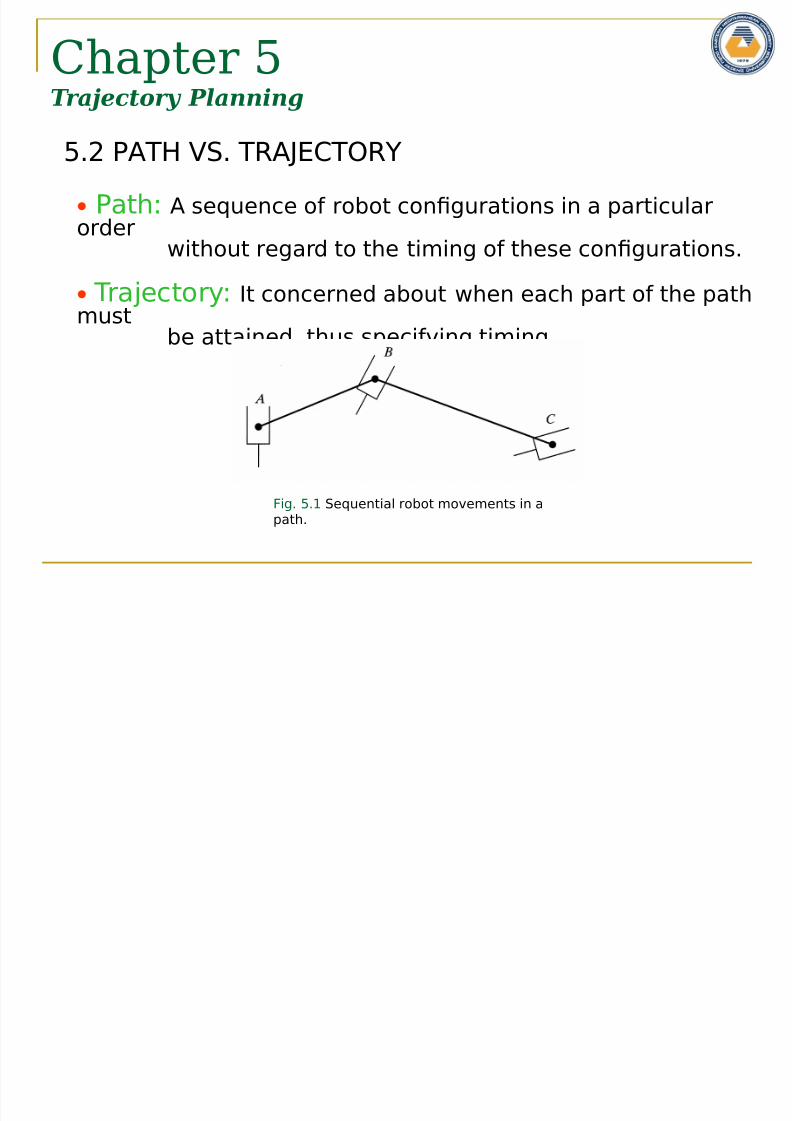
5.) P*T+ ,-. TR*/CTOR0
• Path * se$%ence o# ro!ot con2g%rations in a partic%larorder
itho%t regard to the timing o# these con2g%rations.
• Trajectory It concerned a!o%t hen each part o# the pathm%st !e attained& th%s speci#ying timing.
3ig. 5.1 -e$%ential ro!ot mo"ements in apath.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 3/15
Chapter 5Trajectory Planning
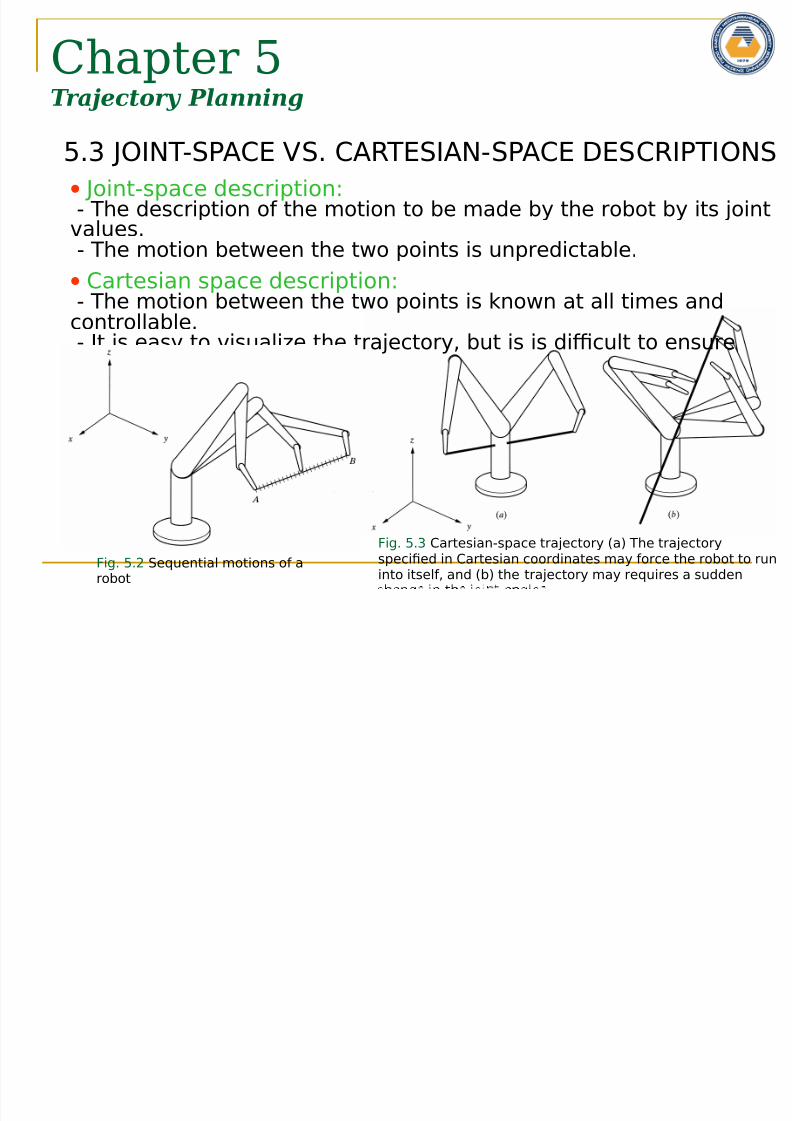
5.4 OINT'-P*C/ ,-. C*RT/-I*N'-P*C/ D/-CRIPTION-
• oint'space description' The description o# the motion to !e made !y the ro!ot !y its joint"al%es. ' The motion !eteen the to points is %npredicta!le.
• Cartesian space description' The motion !eteen the to points is (non at all times andcontrolla!le. ' It is easy to "is%alie the trajectory& !%t is is di6c%lt to ens%rethat
sing%larity.
3ig. 5.) -e$%ential motions o# aro!ot
3ig. 5.4 Cartesian'space trajectory 7a8 The trajectoryspeci2ed in Cartesian coordinates may #orce the ro!ot to r%ninto itsel#& and 7!8 the trajectory may re$%ires a s%dden
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 4/15
Chapter 5Trajectory Planning
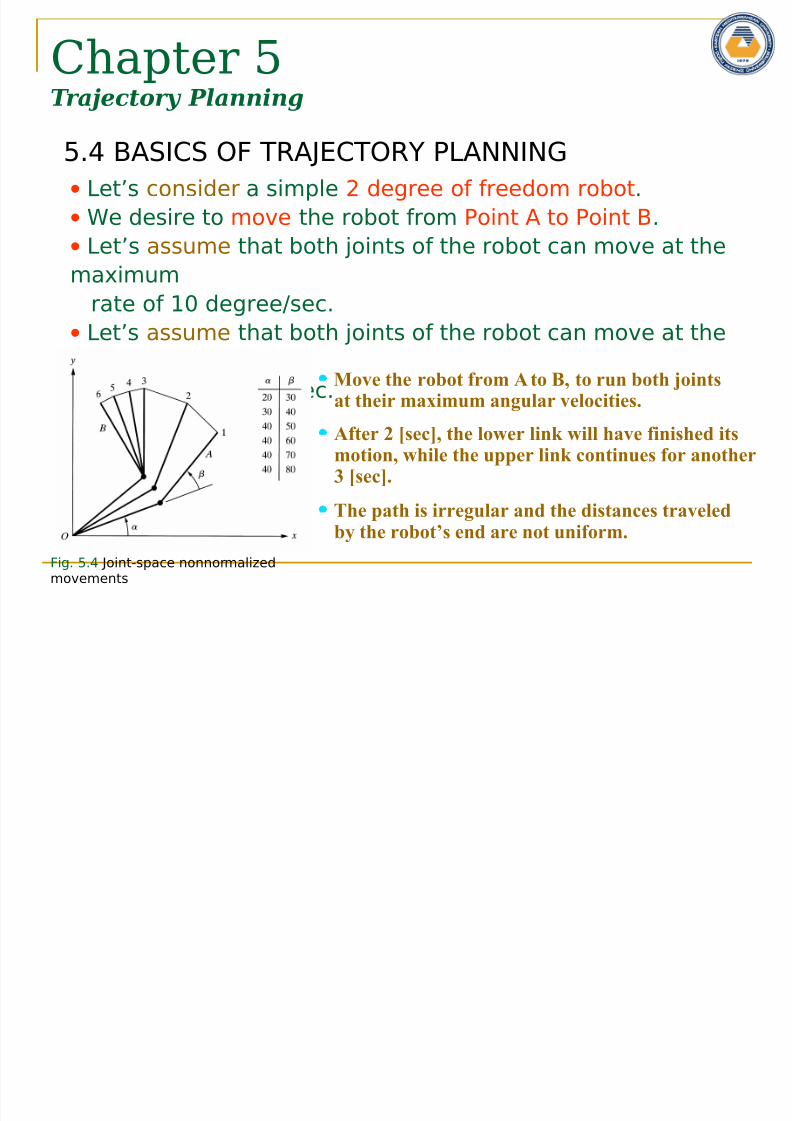
5.9 :*-IC- O3 TR*/CTOR0 P;*NNIN<
• ;et=s consider a simple ) degree o# #reedom ro!ot.
• >e desire to mo"e the ro!ot #rom Point * to Point :.
• ;et=s ass%me that !oth joints o# the ro!ot can mo"e at the
ma?im%m rate o# 1@ degreeAsec.
• ;et=s ass%me that !oth joints o# the ro!ot can mo"e at the
ma?im%m
rate o# 1@ degreeAsec.
3ig. 5.9 oint'space nonnormaliedmo"ements
• Move the robot from A to B, to run both jointsat their maximum angular velocities.
• After 2 [sec], the lower link will have finished itsmotion, while the uer link continues for another! [sec].
• "he ath is irregular and the distances traveledb# the robot$s end are not uniform.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 5/15
Chapter 5Trajectory Planning
5.9 :*-IC- O3 TR*/CTOR0 P;*NNIN<
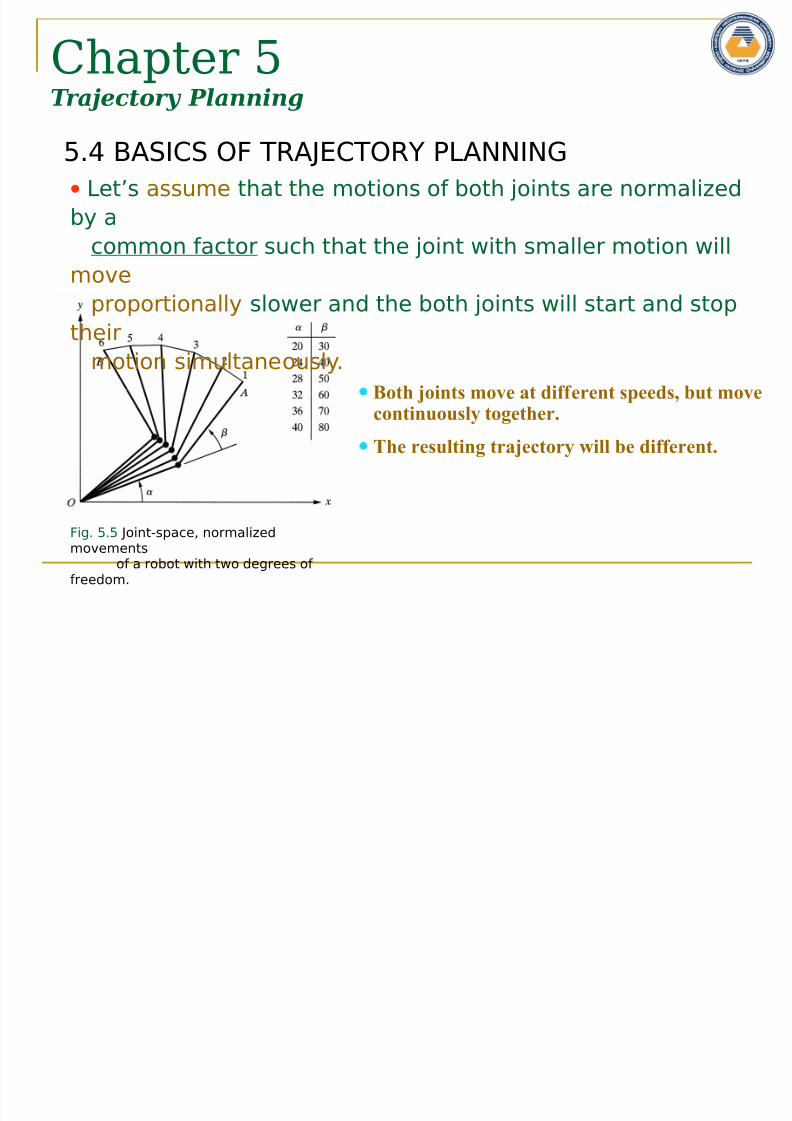
3ig. 5.5 oint'space& normalied
mo"ementso# a ro!ot ith to degrees o##reedom.
• Both joints move at different seeds, but move
continuousl# together.
• "he resulting trajector# will be different.
• ;et=s ass%me that the motions o# !oth joints are normalied
!y a
common #actor s%ch that the joint ith smaller motion ill
mo"eproportionally sloer and the !oth joints ill start and stop
their
motion sim%ltaneo%sly.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 6/15
Chapter 5Trajectory Planning
5.9 :*-IC- O3 TR*/CTOR0 P;*NNIN<
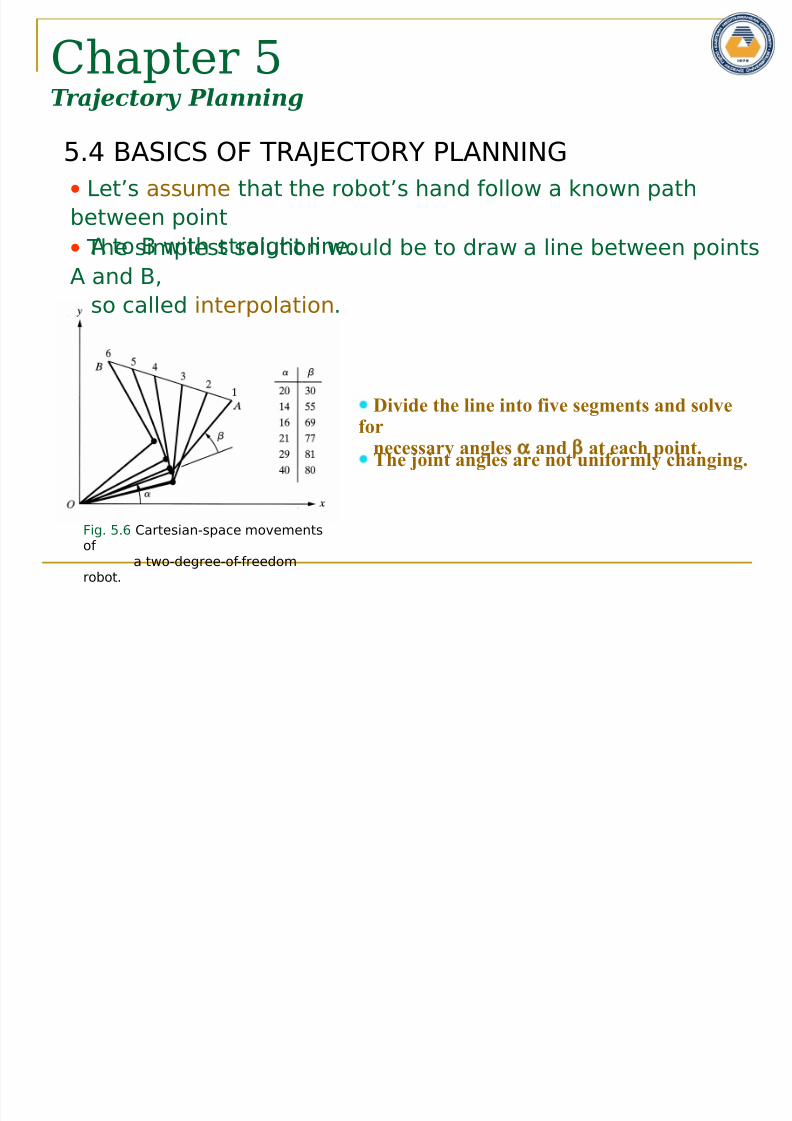
3ig. 5.B Cartesian'space mo"ements
o# a to'degree'o#'#reedomro!ot.
•
%ivide the line into five segments and solvefornecessar# angles and at each oint.
• "he joint angles are not uniforml# changing.
• ;et=s ass%me that the ro!ot=s hand #ollo a (non path
!eteen point
* to : ith straight line.• The simplest sol%tion o%ld !e to dra a line !eteen points
* and :&so called interpolation.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 7/15
Chapter 5Trajectory Planning
5.9 :*-IC- O3 TR*/CTOR0 P;*NNIN<
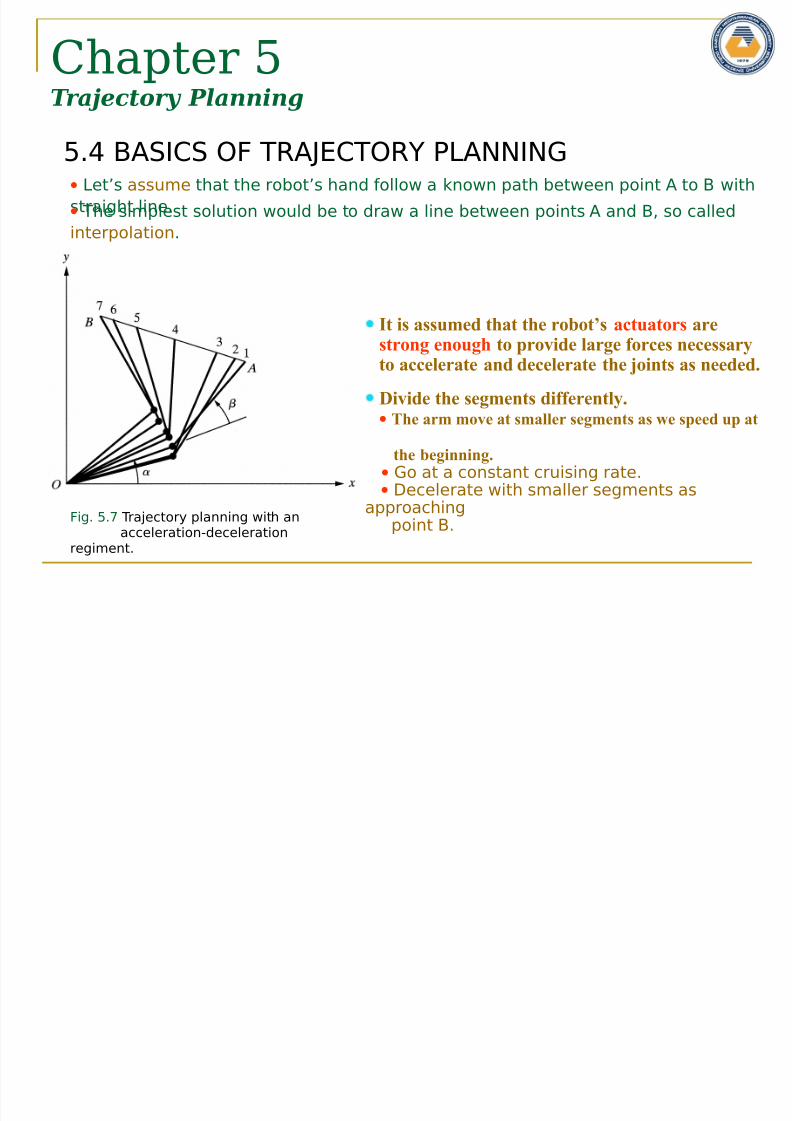
3ig. 5. Trajectory planning ith an acceleration'deceleration
regiment.
• &t is assumed that the robot$s actuators arestrong enough to rovide large forces necessar#
to accelerate and decelerate the joints as needed.
• %ivide the segments differentl#.
• "he arm move at smaller segments as we seed u at
the beginning.• <o at a constant cr%ising rate.
• Decelerate ith smaller segments asapproaching point :.
• ;et=s ass%me that the ro!ot=s hand #ollo a (non path !eteen point * to : ith
straight line.• The simplest sol%tion o%ld !e to dra a line !eteen points * and :& so called
interpolation.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 8/15
Chapter 5Trajectory Planning
5.9 :*-IC- O3 TR*/CTOR0 P;*NNIN<
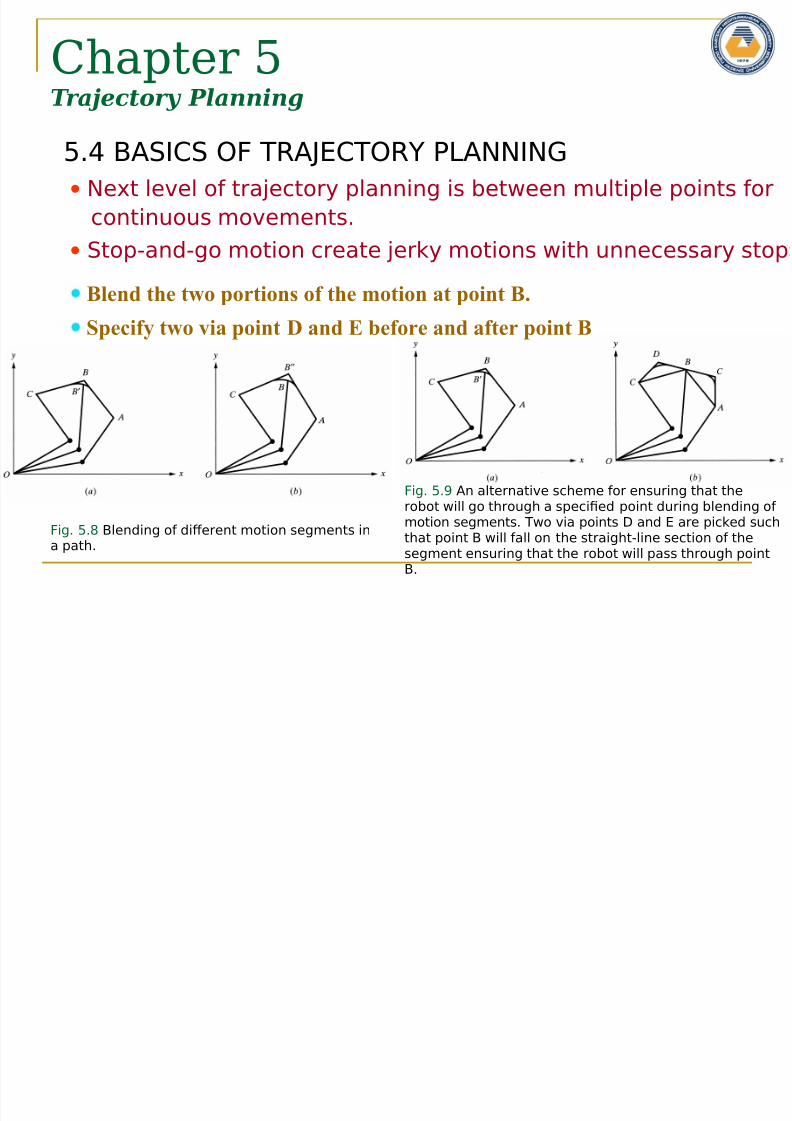
3ig. 5. :lending o# diEerent motion segments ina path.
• Blend the two ortions of the motion at oint B.
• Ne?t le"el o# trajectory planning is !eteen m%ltiple points #or
contin%o%s mo"ements.
• -top'and'go motion create jer(y motions ith %nnecessary stop
3ig. 5.F *n alternati"e scheme #or ens%ring that thero!ot ill go thro%gh a speci2ed point d%ring !lending o#motion segments. To "ia points D and / are pic(ed s%chthat point : ill #all on the straight'line section o# the
segment ens%ring that the ro!ot ill pass thro%gh point:.
•
'ecif# two via oint % and ( before and after oint B
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 9/15
Chapter 5Trajectory Planning
5.5 OINT'-P*C/ TR*/CTOR0 P;*NNIN<
• +o the motions o# a ro!ot can !e planned in joint'space ith
controlled characteristics.
• Polynomials o# diEerent orders• ;inear #%nctions ith para!olic !lends
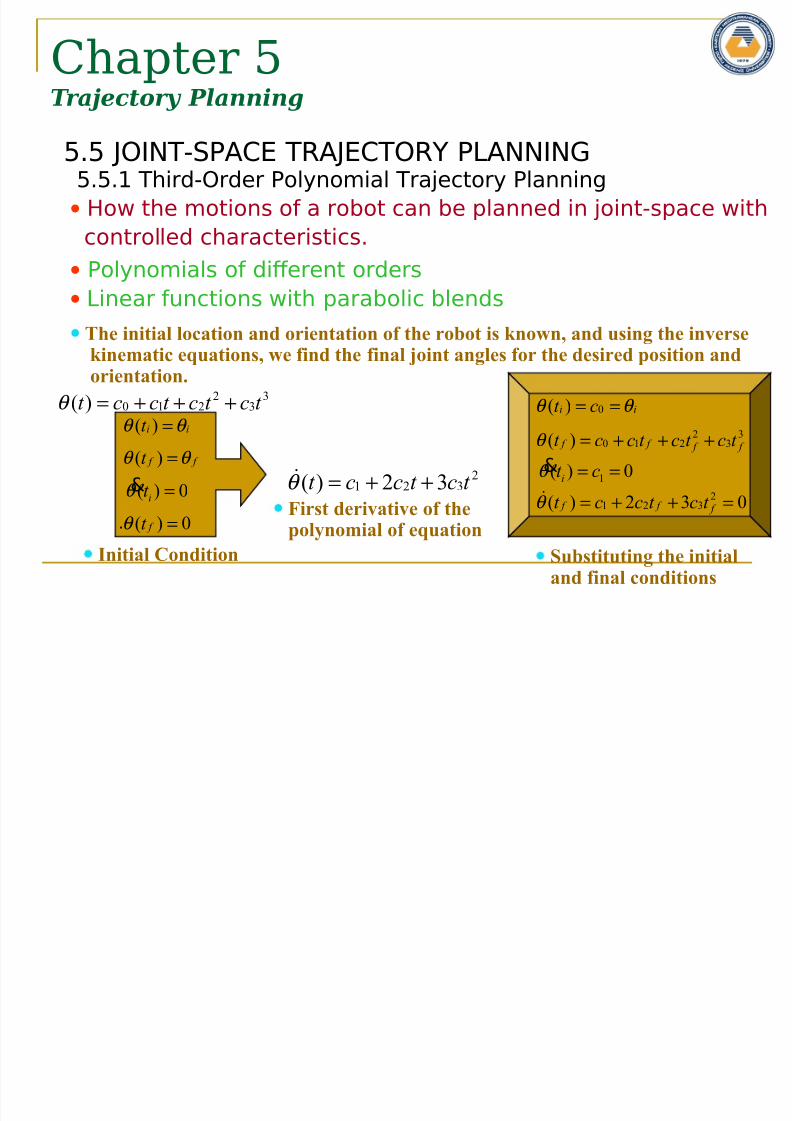
5.5.1 Third'Order Polynomial Trajectory Planning
• "he initial location and orientation of the robot is known, and using the inversekinematic e)uations, we find the final joint angles for the desired osition and
orientation.3
32
210)( t ct ct cct +++=θ
iit θ θ =)(
f f t θ θ =)(
( ) 0it θ =G
0)( = f t θ
•
&nitial *ondition
2321 32)( t ct cct ++=θ
• +irst derivative of theol#nomial of e)uation
ii ct θ θ == 0
)(3
32
210)( f f f f t ct ct cct +++=θ
1( ) 0it cθ = =G
032)( 2321 =++= f f f t ct cct θ
•
'ubstituting the initialand final conditions

7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 10/15
Example
It is desired to have the first joint of a six-axis robot go from initial angle of 30 o to
a final angle of 75o in 5 seconds. Using a third-order polynomial calc!late the
joint angle at " # 3 and $ seconds.
2 30 1 2 3( )t c c t c t c t θ = + + +
0(0) 30cθ = =
1(0) 0cθ = =G
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 11/15
Chapter 5Trajectory Planning
5.5 OINT'-P*C/ TR*/CTOR0 P;*NNIN<
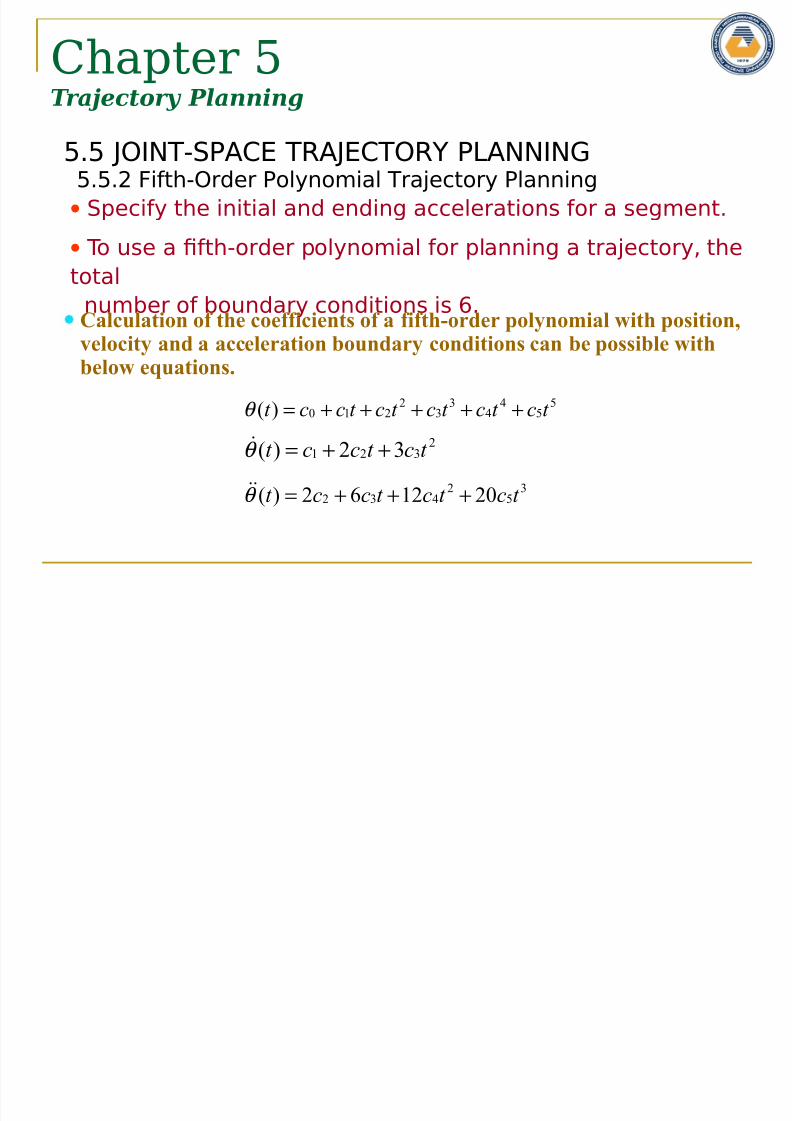
• -peci#y the initial and ending accelerations #or a segment.
• To %se a 2#th'order polynomial #or planning a trajectory& the
totaln%m!er o# !o%ndary conditions is B.
5.5.) 3i#th'Order Polynomial Trajectory Planning
• *alculation of the coefficients of a fifthorder ol#nomial with osition, velocit# and a acceleration boundar# conditions can be ossible with
below e)uations.
5
5
4
4
3
3
2
210)( t ct ct ct ct cct +++++=θ 2
321 32)( t ct cct ++=θ
35
2432 201262)( t ct ct cct +++=θ
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 12/15
Chapter 5Trajectory Planning
5.5 OINT'-P*C/ TR*/CTOR0 P;*NNIN<
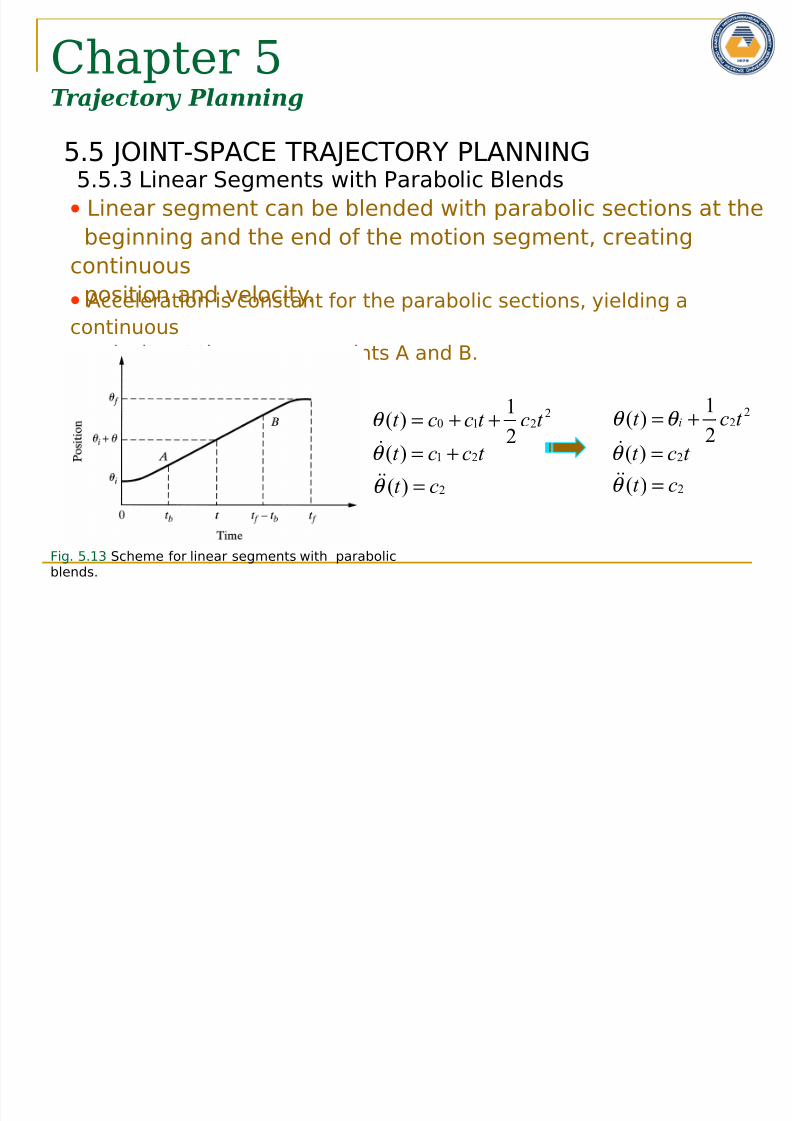
• ;inear segment can !e !lended ith para!olic sections at the
!eginning and the end o# the motion segment& creating
contin%o%s position and "elocity.• *cceleration is constant #or the para!olic sections& yielding a
contin%o%s
"elocity at the common points * and :.
5.5.4 ;inear -egments ith Para!olic :lends
3ig. 5.14 -cheme #or linear segments ith para!olic!lends.
2210
21)( t ct cct ++=θ
t cct 21)( +=θ
2)( ct =θ
22
21)( t ct i += θ θ
t ct 2)( =θ
2)( ct =θ
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 13/15
Chapter 5Trajectory Planning
5.5 OINT'-P*C/ TR*/CTOR0 P;*NNIN<
• The position o# the ro!ot at time t @ is (non and %sing the
in"erse(inematic e$%ations o# the ro!ot& the joint angles at "ia points
and at
the end o# the motion can !e #o%nd.• To !lend the motion segments together& the !o%ndary
conditions o#
each point to calc%late the coe6cients o# the para!olic
segments is
%sed.
5.5.9 ;inear -egments ith Para!olic :lends and ,ia Points
• Ha?im%m alloa!le accelerations sho%ld not !e
e?ceeded.
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 14/15
Chapter 5Trajectory Planning
5.5 OINT'-P*C/ TR*/CTOR0 P;*NNIN<
• Incorporating the initial and 2nal !o%ndary conditions
together ith
this in#ormation ena!les %s to %se higher order polynomials inthe
!elo #orm& so that the trajectory ill pass thro%gh all
speci2ed points.• It re$%ires e?tensi"e calc%lation #or each joint and higher
order
polynomials.
5.5.5 +igher Order Trajectories
• Com!inations o# loer order polynomials #or diEerent
segments o# the
trajectory and !lending together to satis#y all re$%ired
!o%ndaryconditions is re$%ired.
nn
nn t ct ct ct ct cct ++++++=
−−
11
33
2210)( θ
7/24/2019 Robot Trajectory Planning
http://slidepdf.com/reader/full/robot-trajectory-planning 15/15
Chapter 5Trajectory Planning
5.B C*RT/-I*N'-P*C/ TR*/CTORI/-
• Cartesian'space trajectories relate to the motions o# a ro!ot
relati"e to
the Cartesian re#erence #rame.• In Cartesian'space& the joint "al%es m%st !e repeatedly
calc%lated
thro%gh the in"erse (inematic e$%ations o# the ro!ot.• Comp%ter ;oop
*lgorithm-/ &ncrement the time b# t0t1 t.
∆
-2/ *alculate the osition and orientation of the hand based on the selectedfunction for the trajector#.
-!/ *alculate the joint values for the osition and orientation through theinverse kinematic e)uations of the robot.
-/ 'end the joint information to the controller.
-3/ 4o to the beginning of the loo



























