Embed Size (px)
Citation preview

IAF-99-A.5.10Rapid Interplanetary Tether Transport SystemsRobert P. Hoyt and Robert L. ForwardTethers Unlimited, Inc., Clinton, WA, USA, <[email protected]>
Gerald D. NordleyConsultant, 1238 Prescott Avenue, Sunnyvale CA USA
Chauncey W. UphoffFortune Eight Aerospace Co., Longmont, CO USA
50th International Astronautical Congress4-8 Oct 1999/Amsterdam, The Netherlands
For permission to copy or republish, contact the International Astronautical Federation3-5 Rue Mario-Nikis, 75015 Paris, France

IAF-99-A.5.10
RAPID INTERPLANETARY TETHER TRANSPORT SYSTEMS
Robert P. Hoyt and Robert L. ForwardTethers Unlimited, Inc. Clinton WA USA <[email protected]>
Gerald D. NordleyConsultant, 1238 Prescott Avenue, Sunnyvale CA USA
Chauncey W. UphoffFortune Eight Aerospace Co., Longmont, CO USA
Abstract
Routine transport to and from Luna, Mars, and the other moons and planets in the solar system demands an efficient,rapid, low-cost transportation system. We have invented an innovative interplanetary transport architecture to meetthat need. It consists of two rotating tethers in elliptical orbits, one around Earth and the other around thedestination moon or planet. These two tethers, made of commercially available polymers, suffice to move payloadsback and forth without the use of propellant except for midcourse corrections. For airless bodies, like Luna orMercury, the payloads can be delivered to the s u r f a c e of the body. We will describe two such architectures in detail, aCislunar Tether Transport system and a Mars-Earth Rapid Interplanetary Tether Transport (MERITT) system. TheCislunar Tether Transport scenario takes into account the full complexities of the orbital mechanics of the Earth-Moon system, including non-spherical gravitational potentials, inclined orbit dynamics, and luni-solar perturbations.We also describe a design for the first stage of the system, a “rotating electrodynamic force tether” that combines thetechnology of electrodynamic tethers with the principles of rotating momentum-transfer tethers to enable multiplepayloads to be boosted from LEO to higher orbits with no propellant needed. In the MERITT system, a payloadcapsule in LEO is picked up by the Earth orbiting tether as the tether nears perigee and is tossed a half-rotation later,slightly after perigee. The velocity increment given the payload deep in the gravity well of Earth is sufficient tosend the payload on an escape trajectory to Mars, where it is caught by the Mars tether and placed in low Martianorbit. The mass of each tether system, using commercially available polymers and reasonable safety factors,including the central facility and ballast mass, can be as little as 15 times the mass of the payload being handled.Tethers with tip velocities of 2.5 km per second can send payloads to Mars in as little as 90 days if aerobraking isused dissipate some of the high relative velocity on the Mars end. Tether-to-tether transfers without aerobraking take130 to 160 days.
Nomenclature & Unitsa semimajor axis, mC3 orbital energy, ≡ V2 - 2µ/r , km2/s2
d density, kg/m3
e ellipse eccentricityE orbital energy, JF safety factorh specific angular momentum, m2/si orbit inclination, degreesJ2 2nd geopotential coefficientL tether arm length, ml distance from facility to center of mass, mM mass, kgN orbital resonance parameterp orbit semiparameter, = a(1-e2) , mr radius, mRe Earth radius, mrp perigee radius, mT tensile strength, PaV velocity, m/sVC characteristic velocity, m/s
λ argument of tether perigee w.r.t.Earth-Moon line
µe Earth’s gravitational parameter= GMe , m
3/s2
µm Moon’s gravitational parameter= GMm , m3/s2
ω angular velocity, radians/sθ true anomaly˙ ω Apsidal precession/regression rate, rad/s˙ Ω Nodal regression rate, rad/s
subscripts:na apoapse np periapsenc critical nm moonnf facility ng grapplenP payload nt tether
Copyright © 1999 by Tethers Unlimited, Inc.Released to IAF/IAA/AIAA to publish in all forms.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
2
IntroductionThe possibility of using rotating “momentum-
exchange” tethers to pick up payloads from oneorbit and toss them into another orbit has beendiscussed conceptually numerous times over thepast several decades.1,2,3,4 In this paper, weinvestigate the design of specific tether systemarchitectures for two important missions: first,transport between low Earth orbit (LEO) and thesurface of the Moon, and second, transport ofpayloads between LEO and low Mars orbit.
The Cislunar Tether TransportSystem
A “Cislunar Tether Transport System”composed of one rotating momentum-exchangetether in elliptical, equatorial Earth orbit and asecond rotating tether facility in a low lunar orbitcan provide a means for repeatedly exchangingpayloads between low Earth orbit (LEO) and thesurface of the Moon, with little or no propellantexpenditure required. In 1991, Forward5 showedthat such a system is theoretically possible froman energetics standpoint. A later study by Hoytand Forward6 developed a first-order design forsuch a system. These previous studies, however,utilized a number of simplifying assumptionsregarding orbital and tether mechanics in theEarth-Moon system, including assumptions ofcoplanar orbits, ideal gravitational potentials,and infinite facility ballast masses. The purposeof this paper is to remove these assumptions anddevelop an architecture for such a system thattakes into account the complexities of orbitalmechanics in the Earth-Moon system.
The basic concept of the Cislunar TetherTransport System is to use a rotating tether inEarth orbit to pick payloads up from LEO orbitsand toss them to the Moon, where a rotatingtether in lunar orbit, called a “Lunavator™”,could catch them and deliver them to the lunarsurface. As the Lunavator™ delivers payloads tothe Moon’s surface, it can also pick up returnpayloads, such as water or aluminum processedfrom lunar resources, and send them down to LEO.By balancing the flow of mass to and from theMoon, the orbital momentum and energy of thesystem can be conserved, eliminating the need toexpend large quantities of propellant to move thepayloads back and forth. This system isillustrated in Figure 1.
Orbital Mechanics of the Earth-Moon SystemOrbital mechanics in cislunar space are made
quite complex by the different and varyingorientations of the ecliptic plane, the Earth’sequatorial plane, the Moon’s orbital plane, andthe Moon’s equatorial plane. Figure 2 attempts toillustrate these different planes. The inclinationof the Earth’s equatorial plane (the “obliquity ofthe ecliptic”), is approximately 23.45°, but variesdue to tidal forces exerted by the Sun and Moon.The angle i m between the Moon’s equatorial planeand a plane through the Moon’s center that isparallel to the ecliptic plane is constant, about1.58°. The inclination of the Moon’s orbit relativeto the ecliptic plane is also constant, about λm =5.15°.7 The line of nodes of the Moon’s orbitregresses slowly, revolving once every 18.6 years.As a result, the inclination of the Moon’s orbitrelative to the Earth’s equator varies between
Figure 1. Conceptual illustration of the CislunarTether Transport System.
Figure 2. Schematic illustrating the geometry of theEarth-Moon system.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
3
18.3-28.6 degrees. The Moon’s orbit also has aslight eccentricity, approximately e m = 0.0549.
Tether OrbitsAfter considering many different options,
including the three-tether systems proposed pre-viously and various combinations of ellipticaland circular orbits, we have determined that theoptimum configuration for the Cislunar Tethersystem is to utilize one tether in an elliptical,equatorial Earth orbit and one tether in a polar,circular lunar orbit, as illustrated in Figure 1.This two-tether system will require the lowesttotal system mass, minimize the systemcomplexity and provide the most frequenttransfer opportunities. The Earth-orbit tetherwill pick payloads up from equatorial low-LEOorbits and throw them towards one of the twopoints where the Moon crosses the Earth’sequatorial plane. As the payload approachesthe Moon, it will need to perform a small ∆Vmaneuver to set it up into the proper approachtrajectory; the size of this maneuver will varydepending upon the inclination of the Moon’sorbit plane and launch dispersions, but under mostconditions it will only require about 25 m/s of ∆V.
In the following sections, we will firstdevelop a design for a tether facility for boostingpayloads from low-LEO orbits to lunar transferorbits (LTO). We will then develop a design for a“Lunavator™” capable of catching the payloadsand delivering them to the surface of the Moon. We will then discuss the numerical simulationsused to verify the feasibility of this systemarchitecture.
Design of a Tether Boost Facility forLunar Transfer Injection
The first stage of the Cislunar TetherTransport System will be a tether boost facilityin elliptical Earth orbit capable of pickingpayloads up from low-LEO orbits and tossingthem to the Moon. In order to determine anoptimum configuration for this facility, we mustbalance the need to minimize the required massesof the tethers and facilities with the need tomake the orbital dynamics of the system asmanageable as possible.
The mission of the Earth-orbit portion of theCislunar Tether Transport System is to pick up apayload from low-Earth orbit and inject it into anear-minimum energy lunar transfer orbit. The
desired lunar transfer trajectories have a C3 ofapproximately –1.9 (km/s)2. A payload orig-inating in a circular orbit at 350 km altitude hasan initial velocity of 7.7 km/s and a C3 of –60(km/s)2. To impulsively inject the payload into atrajectory with a C3 of –1.9 would require a ∆V ofapproximately 3.1 km/s.
Design ConsiderationsTether System Staging
From an operational standpoint, the mostconvenient design for the Earth-orbit portion of aCislunar Tether Transport System would be tostart with a single tether facility in a circularlow-Earth-orbit, with the tether retracted. Thefacility would rendezvous with the payload,deploy the payload at the end of the tether, andthen use propellantless electrodynamic tetherpropulsion to spin up the tether until the tipspeed reached 3.1 km/s and the tether could injectthe payload into a LTO. However, because thetether transfers some of its orbital momentum andenergy to the payload when it boosts it, a tetherfacility in circular orbit would require a verylarge ballast mass so that its orbit would not dropinto the upper atmosphere after it boosts apayload. Furthermore, the strong dependence ofthe required tether mass on the tether tip speedwill likely make this approach impracticalwith current material technologies. The requiredmass for a tapered tether depends upon the tipmass and the ratio of the tip velocity to thetether material’s critical velocity according tothe relation derived by Moravec:8
Mt = Mp π∆V
VC
e
∆V 2
VC2
erf∆V
VC
, (1)
where erf() is the error function. The criticalvelocity of a tether material depends upon thetensile strength, the material density, and thedesign safety factor according to:
VC =2T
Fd. (2)
The exponential dependence of the tether mass onthe square of the velocity ratio results in a veryrapid increase in tether mass with this ratio.
Currently, the best commercially-availabletether material is Spectra® 2000, a form ofhighly oriented polyethlene manufactured byAlliedSignal. High-quality specimens ofSpectra® 2000 have a room temperature tensile

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
4
strength of 4 GPa, and a density of 0.97 g/cc. Witha safety factor of 3, the material’s criticalvelocity is 1.66 km/s. Using Eqn. (1), anoptimally-tapered Spectra® tether capable ofsustaining a tip velocity of 3.1 km/s would requirea mass of over 100 times the payload mass.While this might be technically feasible forvery small payloads, such a large tether massprobably would not be economically competitivewith rocket technologies. In the future, veryhigh strength materials such as “buckytube”yarns may become available with tensilestrengths that will make a 3 km/s tetherfeasible; however, we will show that a differentapproach to the system architecture can utilizecurrently available materials to perform themission with reasonable mass requirements.
The tether mass is reduced to reasonablelevels if the ∆V/V c ratio can be reduced to levelsnear unity or lower. In the Cislunar system, wecan do this by placing the Earth-orbit tether intoan elliptical orbit and arranging its rotation sothat, at perigee, the tether tip can rendezvouswith and capture the payload, imparting a1.6 km/s ∆V to the payload. Then, when thetether returns to perigee, it can toss the payloadahead of it, giving it an additional 1.5 km/s ∆V.By breaking the 3.1 km/s ∆V up into two smallerboost operations with ∆V/V c < 1, we can reducethe required tether mass considerably. Thedrawback to this method is that it requires achallenging rendezvous between the payload andthe tether tip; nonetheless, the mass advantageswill likely outweigh that added risk.
Behavior of Elliptical Earth OrbitsOne of the major challenges to designing a
workable tether transportation system usingelliptical orbits is motion of the orbit due to theoblateness of the Earth. The Earth’s oblatenesswill cause the plane of an orbit to regress relativeto the Earth’s spin axis at a rate equal to:9
˙ Ω = −3
2J2
Re2
p2 n cos(i) (3)
And the line of apsides (ie. the longitude of theperigee) to precess or regress relative to theorbit’s nodes at a rate equal to:
˙ ω =3
4J2
Re2
p2 n (5cos 2 i − 1) (4)
In equations (3) and (4), n is the “mean meanmotion” of the orbit, defined as
n =µ e
a3 1 −3
4J2
Re2
p2 1− e2 (1− 3cos2 i)
. (5)
For an equatorial orbit, the nodes are undefined,but we can calculate the rate of apsidalprecession relative to inertial space as the sum˙ Ω + ˙ ω of the nodal and apsidal rates given by
Eqs. (3) and (4).
In order to make the orbital mechanics of theCislunar Tether Transport System manageable,we place two constraints on our system design:
• First, the orbits of the tether facility will beequatorial, so that i=0 and the nodalregression given by Eq. (3) will not be an issue.
• Second, the tether system will throw thepayload into a lunar transfer trajectory thatis in the equatorial plane. This means that itcan perform transfer operations when theMoon is crossing either the ascending ordescending node of its orbit.
Nonetheless, we still have the problem ofprecession of the line of apsides of an orbit. If thetether orbits are circular, this is not an issue, butit is an issue for systems that use elliptical orbits.In an elliptical orbit system we wish to performall catch and throw operations at or near perigee. As illustrated in Figure 3, for the payload toreach the Moon’s radius at the time when theMoon crosses the Earth’s equatorial plane, thepayload must be injected into an orbit that has aline of apsides at some small angle λ from theline through the Moon’s nodes. If the orbit
Figure 3. Geometry of the tether orbit and theMoon’s orbit.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
5
experiences apsidal precession, the angle λ willhave the proper value only periodically.Consequently, in our designs we will seek tochoose the orbital parameters such that theapsidal precession of the orbit will have aconvenient resonance with the Moon's orbit.
Elliptical-Orbit Tether Boost FacilityIn the Cislunar Tether Transport System, the
transfer of payloads between a low-LEO andlunar transfer orbits is performed by a singlerotating tether facility. This facility performs acatch and release maneuver to provide thepayload with two boosts of approximately1.5 km/s each. To enable the tether to performtwo “separate” ∆V operations on the payload,the facility is placed into a highly ellipticalorbit with its perigee in LEO. First, the tetherrotation is arranged such that when the facilityis at perigee, the tether is swinging verticallybelow the facility so that it can catch a payloadmoving more slowly than the facility. After itcatches the payload, it waits for one orbit andadjusts its rotation slightly (by reeling the tetherin or out) so that when it returns to perigee, thetether is swinging above the facility and it canrelease the payload into a trajectory movingfaster than the facility.
HEFT Tether Boost FacilityIn order to enable the Earth-orbit tether
facility to boost materials to the Moon before alunar base has been established and beginssending return payloads back to LEO, we proposeto combine the principle of rotating momentum-exchange tethers with the techniques of
electrodynamic tether propulsion tocreate a facility capable of reboostingits orbit after each payload transfer withoutrequiring return traffic or propellant expenditure.This concept, the “High-strength ElectrodynamicForce Tether” (HEFT) Facility,10 is illustrated inFigure 4. The HEFT Facility would include acentral facility housing a power supply, ballastmass, plasma contactor, and tether deployer,which would extend a long, tapered, high-strength tether. A small grapple vehicle wouldreside at the tip of the tether to facilitaterendezvous and capture of the payloads. Thetether would include a conducting core, and asecond plasma contactor would be placed near thetether tip. By using the power supply to drivecurrent along the tether, the HEFT Facility couldgenerate electrodynamic forces on the tether. Byproperly varying the direction of the current asthe tether rotates and orbits the Earth, thefacility can use these electrodynamic forces togenerate either a net torque on the system toincrease its rotation rate, or a net thrust on thesystem to boost its orbit. The HEFT Facility thuscould repeatedly boost payloads from LEO to theMoon, using propellantless electrodynamic pro-pulsion to restore its orbit in between eachpayload boost operation.
Tether DesignIn order to design the tether boost facility, we
must determine the tether length, rotation rate,and orbit characteristics that will permit thetether to rendezvous with the payload and throwit into the desired lunar transfer trajectory.
In the baseline design, the payload begins ina circular Initial Payload Orbit (IPO) with avelocity of
Vp,0 =µe
rIPO
. (6)
The facility is placed into an elliptical orbitwith a perigee above the payload’s orbit, withthe difference between the facility’s initialperigee and the payload orbital radius equal tothe distance from the tether tip to the center ofmass of the facility and tether:
rp ,0 = rIP 0 + (L − lcm,unloaded ) , (7)
where l cm,unloaded is the distance from the facility tothe center of mass of the system before the
Figure 4. Schematic of the HEFT Facility design.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
6
payload arrives (this distance must be calculatednumerically for a tapered tether).
The tether tip velocity is equal to thedifference between the payload velocity and thefacility’s perigee velocity:
Vt ,0 = Vp,0 −VIP0 . (8)
In order to ensure that a payload will not be“lost” if it is not caught by the tether on its firstopportunity, we choose the semimajor axis of thefacility’s orbit such that its orbital period willbe some rational multiple N of the payload’sorbital period:
Pf ,0 = NPIPO ⇒ a f ,0 = N2
3 rIPO (9)
For example, if N=5/2, this condition means thatevery two orbits the facility will have anopportunity to rendezvous with the payload,because in the time the facility completes twoorbits, the payload will have completed exactlyfive orbits.
An additional consideration in the design ofthe system are the masses of the facility andtether. A significant facility mass is required toprovide “ballast mass.” This ballast mass servesas a “battery” for storing the orbital momentumand energy that the tether transfers to and frompayloads. If all catch and throw operations areperformed at perigee, the momentum exchangeresults primarily in a drop in the facility’sapogee. A certain minimum facility mass isnecessary to keep the post catch and throw orbitabove the Earth’s upper atmosphere. Some of the“ballast mass” will be provided by the mass ofthe tether deployer and winch, the facilitypower supply and power processing hardware,and the mass of the tether itself. If additionalmass is required, it could be provided byavailable material in LEO, such as spent upperstage rockets and shuttle external tanks.
The tether mass required will depend uponthe maximum tip velocity and the choices oftether material and design safety factor, asdescribed by Eq. 1. For a tapered tether, thetether’s center-of-mass will be closer to thefacility end of the tether. This can be animportant factor when the tether mass issignificant compared to the payload and facilitymasses. In the calculations below, we have used amodel of a tether tapered in a stepwise manner to
calculate tether masses and the tether center-of-mass.
By conservation of momentum, the perigeevelocity of the center of mass of the tether andpayload after rendezvous is:
Vp,1 =Vp,0(M f + Mt) + VIPOMP
(M f + Mt ) + MP
. (10)
When the tether catches the payload, thecenter-of-mass of the tether system shiftsdownward slightly as the payload mass is addedat the bottom of the tether:
rp ,1 =rp ,0 (M f + Mt) + VIPOMP
(M f + Mt ) + MP
(11)
In addition, when the tether catches thepayload, the angular velocity of the tether doesnot change, but because the center-of-mass shiftscloser to the tip of the tether when the tethercatches the payload, the tether tip velocitydecreases. The new tether tip velocity can becalculated as
Vt' = Vt
L − lcm,loaded( )L − lcm , unloaded( ) (12)
At this point, it would be possible to specifythe initial payload orbit, the payload/facilitymass ratio, the facility/payload period ratio,and the desired LTO C3, and derive a system ofequations from which one particular tetherlength and one tether tip velocity can becalculated that determine an “exact” systemwhere the tether tip velocity need not be adjustedto provide the desired C3 of the payload lunartrajectory. However, the resulting system designis rather restrictive, working optimally for onlyone particular value of the facility and tethermasses, and results in rather short tether lengthsthat will require very high tip accelerationlevels. Fortunately, we can provide anadditional flexibility to the system design byallowing the tether facility to adjust the tipvelocity slightly by reeling the tether in or out afew percent. If, after catching the payload, thefacility reels the tether in by an amount ∆L, thetip velocity will increase due to conservation ofangular momentum:
Vt'' =
Vt
' L − lcm ,loaded( )L − lcm, loaded( ) − ∆L
(13)

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
7
Then, when the facility returns to perigee, itcan throw the payload into a lunar transfertrajectory with perigee characteristics:
rp, LTO = rp,1 + L − lcm ,loaded( ) − ∆L
Vp,LTO = Vp,1 + Vt'
(14)
Using the equations above, standardKeplerian orbital equations, and equationsdescribing the shift in the system’s center-of-mass as the payload is caught and released, wehave calculated a design for a single-tethersystem capable of picking up payloads from acircular LEO orbit and throwing them to aminimal-energy lunar trajectory. During itsinitial period of operation, while a lunar facilityis under construction and no return traffic exists,the tether system will use electrodynamic tetherpropulsion to reboost itself after throwing eachpayload. Once a lunar facility exists and returntraffic can be used to conserve the facility’sorbital momentum, the orbit of the tether will bemodified slightly to permit round trip traffic.The system parameters are listed below.
Table 1:
Initial System Design: Outbound Traffic Only
Payload:• mass Mp = 2500 kg• altitude h IPO = 308 km• velocity V IPO = 7.72 km/sTether Facility:• tether length L = 80 km• tether mass Mt = 15,000 kg
(Spectra® 2000 fiber, safety factor of 3.5)• tether center-of-mass Lt,com = 17.6 km
(from facility)• central facility mass Mf = 11,000 kg• grapple mass Mg = 250 kg
(10% of payload mass)• total system mass M = 26,250 kg
= 10.5 x payload mass• facility power Pwr = 11 kW avg • initial tip velocity: V t,0 = 1530 m/s• Pre-Catch Orbit:
perigee altitude h p,0 = 378 km,apogee altitude h a,0 = 11,498 kmeccentricity e0 = 0.451period P0 =5/2PIPO
(rendezvous opportunity every 7.55 hrs)• Post-Catch Orbit:
perigee altitude h p,1 = 371 km,apogee altitude h a,1 = 9687 km
eccentricity e1 = 0.408After catching the payload, the facility reels in2950 m of tether, increasing the tip velocity to1607 m/s,• Post-Throw Orbit:
perigee altitude h p,2 = 365 km,apogee altitude h a,2 = 7941 kmeccentricity e2 = 0.36
Lunar Transfer Trajectory:• perigee altitude h p,lto = 438.7 km• perigee velocity Vp,lto = 10.73 km/s• trajectory energy C3 =-1.9 km2/s2
Note that for a particular system design, thetether and facility mass will scale roughlylinearly with the payload mass, so an equivalentsystem designed for sending 250 kg payloads tothe Moon could be constructed with a tether massof 1,500 kg and a facility mass of 1,100 kg. Notealso that the tether mass is not dependent uponthe tether length, so longer tethers can be used toprovide lower tip acceleration levels with nomass penalty.
Electrodynamic Reboost of the Tether OrbitAfter boosting the payload, the tether
facility will be left in a lower energy ellipticalorbit with a semimajor axis that is approx-imately 1780 km less than its original orbit. Oncea lunar base and a lunar tether facility have beenestablished and begin to send return traffic downto LEO, the tether facility can restore its orbit bycatching and de-boosting these return payloads.In the period before a lunar base is established,however, the tether facility will use electro-dynamic propulsion to reboost its apogee bydriving current through the tether when thetether is near perigee. Because the tether is
0 5 10 15 2012230
12240
12250
Time (hours)
12245
12235
12255
Figure 5. Electrodynamic propulsion reboost of thetether’s orbit after the tether has boosted a payloadinto LTO.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
8
rotating, the direction of the current must bealternated as the tether rotates to produce a netthrust on the facility. Using a simulation oftether dynamics and electrodynamics, we havemodeled reboost of a rotating tether system.Figure 5 shows the reboost of the tether’s orbitover one day, assuming that the tether facilityhas a power supply of 11 kW and is able to storeup power during most of its orbit and expend it ata rate of 75 kW during the portion of the orbitwhen the tether is below 2000 km altitude. In oneday, the facility can restore roughly 20 km to itsorbit’s semimajor axis; in roughly 85 days it couldrestore its orbit and be prepared to boost anotherpayload to the Moon. More rapid reboost could beaccomplished with a larger power supply.
Dealing with Apsidal PrecessionAs noted earlier, the oblateness of the Earth
will cause the line of apsides of the tetherfacility’s elliptical orbit to precess. In theCislunar Tether Transport System, we can dealwith this issue in two ways. First, we can utilizetether reeling maneuvers to counteract theapsidal precession.11 By simply reeling thetether in and out slightly once per orbit, thetether facility can exchange angular momentumbetween its rotation and its orbit, resulting inprecession or regression of the line of apsides.With proper phasing and amplitude, tetherreeling can hold the tether’s orbit fixed so that itcan send payloads to the Moon once per month.12
A second method is to choose the tether orbitssuch that their precession rates are nearlyharmonic with the Moon’s orbital rate, so thatthe line of apsides lines up with the Moon’s nodesonce every several months. Furthermore, we canuse propellantless electrodynamic tether pro-pulsion to “fine-tune” the precession rate, eitherby raising/lowering the orbit or by generatingthrust perpendicular to the facility’s velocity.
In the design given above, the mass andinitial orbit of the tether facility was chosensuch that after throwing a payload to the Moon,the tether enters a lower energy elliptical orbitwhich will precess at a rate of 2.28 degrees perday. The initial, high-energy orbit has a slowerprecession rate of approximately 1.58 degrees perday. These orbits were chosen so that in the 95.6days it takes the Moon to orbit 3.5 times aroundthe Earth, the tether facility can reboost itselffrom its low-energy orbit to its high-energy orbitusing propellantless electrodynamic propulsion,
and, by properly varying the reboost rate, theapsidal precession can be adjusted so that the lineof apsides will rotate exactly 180°, lining thetether orbit up properly to boost another payloadto the Moon.
System Design for Round-Trip Traffic
Once a lunar base is established and begins tosend payloads back down to LEO, the orbit of thetether system can be modified slightly to enablefrequent opportunities for round-trip travel.First, the facility’s orbit will be raised so that itshigh-energy orbit has a semimajor axis of12577.572 km, and an eccentricity of 0.41515. Thetether will then pick up a payload from acircular, 450 km orbit and toss it to the Moon sothat it will reach the Moon as the Moon crossesits ascending node. The facility will then drop toa lower energy orbit. At approximately the sametime, the return payload will be released by thelunar tether and begin its trajectory down to LEO.When the return payload reaches LEO, theEarth-orbit tether facility will catch it atperigee, carry it for one orbit, and then place itinto the 450 km initial payload orbit. Upondropping the return payload, the facility willplace itself back into the high-energy orbit. Theperigee of this orbit will precess at a rate suchthat after 4.5 lunar months (123 days) it willhave rotated 180°, and the system will be readyto perform another payload exchange, this timeas the Moon crosses its descending node. If morefrequent round-trip traffic is desired, tetherreeling could again be used to hold theorientation of the tether’s orbit fixed, providingtransfer opportunities once per sidereal month.
Design of a Lunavator™ Compatiblewith Minimal-Energy Lunar Transfers
The second stage of the Cislunar TetherTransport System is a lunar-orbit tether facilitythat catches the payloads sent by the Earth-orbit tether and deposits them on the Moon withzero velocity relative to the surface.
Background: Moravec’s Lunar SkyhookIn 1978, Moravec8 proposed that it would be
possible to construct a tether rotating around theMoon that would periodically touch down on thelunar surface. Moravec’s “Skyhook” would havea massive central facility with two tether arms,each with a length equal to the facility’s orbitalaltitude. It would rotate in the same direction asits orbit with a tether tip velocity equal to the

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
9
orbital velocity of the tether’s center-of-mass sothat the tether tips would periodically touchdown on the Moon with zero velocity relative tothe surface (to visualize this, imagine the tetheras a spoke on a giant bicycle wheel rolling aroundthe Moon).
As it rotates and orbits around the Moon, thetether could capture payloads from Earth as theypassed perilune and then set them down on thesurface of the Moon. Simultaneously, the tethercould pick up payloads to be returned to Earth,and later throw them down to LEO.
Moravec found that the mass of the tetherwould be minimized if the tether had an armlength equal to one-sixth of the diameter of theMoon, rotating such that each of the two armstouched down on the surface of the Moon threetimes per orbit. Using data for the best materialavailable in 1978, Kevlar, which has a densityof 1.44 g/cc and a tensile strength of 2.8 GPa,Moravec found that a two-arm Skyhook with adesign safety factor of F=2 would have to massapproximately 13 times the payload mass. Eacharm of Moravec’s tether would be 580 km long, fora total length of 1160 km, and the tether center-of-mass would orbit the Moon every 2.78 hours ina circular orbit with radius of 2,320 km. At thatradius, the orbital velocity is 1.45 km/s, and soMoravec’s Skyhook would rotate with a tipvelocity of 1.45 km/s.
Using Moravec’s minimal-mass solution,however, requires not only a very long tether but
also requires that the payload have a very highvelocity relative to the Moon at its perilune.Because the lunar tether in Moravec’s design hasan orbital velocity of 1.45 km/s and the tethertips have a velocity of 1.45 km/s relative to thecenter-of-mass, the payload’s perilune velocitywould need to be 2.9 km/s in order to match upwith the tether tip at the top of their rotation.In order to achieve this high perilune velocity,the outbound lunar transfer trajectory would haveto be a high-energy hyperbolic trajectory. Thispresented several drawbacks, the mostsignificant being that if the lunar tether failed tocapture the payload at perilune, it wouldcontinue on and leave Earth orbit on a hyperbolictrajectory. Moreover, as Hoyt and Forward6
found, a high lunar trajectory energy would alsoplace larger ∆V demands on the Earth-orbittethers, requiring two tethers in Earth orbit tokeep the system mass reasonable.
Lunavator™ DesignIn order to minimize the ∆V requirements
placed upon the Earth-orbit portion of theCislunar Tether Transport System and therebypermit the use of a single Earth-orbit tether witha reasonable mass, we have developed a methodfor a single lunar-orbit tether to capture apayload from a minimal-energy lunar transferorbit and deposit it on the tether surface withzero velocity relative to the surface.
Moon-Relative Energy of a Minimum-Energy LTOA payload that starts out in LEO and is
Figure 6. Method for a lunar tether to capture a payload from a minimal-energy LTO and deposit it onthe Moon with zero velocity relative to the surface.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
10
injected into an elliptical, equatorial Earth-orbitwith an apogee that just reaches the Moon’sorbital radius will have a C3 relative to theMoon of approximately 0.72 km2/s2. For a lunartransfer trajectory with a closest-approachaltitude of several hundred kilometers, thepayload will have a velocity of approximately2.3 km/s at perilune. As a result, it would bemoving too slowly to rendezvous with the uppertip of Moravec lunar Skyhook, which will havea tip velocity of 2.9 km/s at the top of itsrotation. Consequently, the design of the lunartether system must be modified to permit a tetherorbiting the Moon at approximately 1.5 km/s tocatch a payload to at perilune when thepayload’s velocity is approximately 2.3 km/s,then increase both the tether length and theangular velocity so that the payload can be setdown on the surface of the Moon with zerovelocity relative to the surface. Simply reelingthe tether in or out from a central facility willnot suffice, because reeling out the tether willcause the rotation rate to decrease due toconservation of angular momentum.
A method that can enable the tether to catcha payload and then increase the tether rotationrate while lowering the payload is illustrated inFigure 6. The “Lunavator™” tether system iscomposed of a long tether, a counterbalance massat one end, and a central facility that has thecapability to climb up or down the tether.Initially, the facility would locate itself nearthe center of the tether, and the system wouldrotate slowly around the center-of-mass of thesystem, which would be located roughly halfwaybetween the facility and the counterbalancemass. The facility could then capture an inboundpayload at its perilune. The facility would thenuse energy from solar cells or other power supplyto climb up the tether towards the counterbalancemass. The center-of-mass of the system willremain at the same altitude, but the distancefrom the tether tip to the center-of-mass willincrease, and conservation of angular momentumwill cause the angular velocity of the system toincrease as the facility mass moves closer to thecenter-of-mass.
AnalysisA first-order design for the Lunavator™ can be
obtained by calculating the shift in the system’scenter-of-mass as the central facility changes itsposition along the tether. We begin by specifyingthe payload mass, the counterbalance mass, the
facility mass, and the tether length. Therequired tether mass cannot be calculated simplyby using Moravec’s tapered tether mass equation,because that equation was derived for a free-space tether. The Lunavator™ must support notonly the forces due to centripetal acceleration ofthe payload and tether masses, but also the tidalforces due to the Moon’s gravity. The equationsfor the tether mass with gravity-gradient forcesincluded are not analytically integrable, so thetether mass must be calculated numerically.
Prior to capture of the payload, the distancefrom the counterbalance mass to the center-of-mass of the tether system is
Lcm ,0 =M f L f + MtLcm, t
Mc + M f + Mt
, (15)
where Lf is the distance from the counterbalanceto the facility and Lcm,t is the distance from thecounterbalance to the center-of-mass of thetether. Lcm,t must be calculated numerically for atapered tether.
If the Lunavator™ is initially in a circularorbit with radius a 0, it will have a center-of-mass velocity of
vcm ,0 =µm
a0
. (16)
At the top of the tether swing, it can capturea payload from a perilune radius of
rp = a0 + (Lt − Lcm ,0 ). (17)
A payload sent from Earth on a near-minimumenergy transfer will have a C3,m of approximately0.72 km2/s2. Its perilune velocity will thus be
vp =2µm
a0 + (Lt − Lcm ,0)+ C3, m . (18)
In order for the tether tip’s total velocity tomatch the payload velocity at rendezvous, thevelocity of the tether tip relative to the center ofmass must be
vt ,0 = vp − vcm,0 , (19)
and the angular velocity of the tether systemwill be
ω t,0 =v t,0
Lt − Lcm,0
. (20)

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
11
When the tether captures the payload, thecenter of mass of the new system, including thepayload, is at perigee of a new, slightlyelliptical orbit, as illustrated in Figure 7 (it wasin a circular orbit and caught a payload goingfaster than the center-of-mass). The perigeeradius and velocity of the center–of-mass are
vp,1 =vcm,0 (Mc + M f + Mt) + vp Mp
Mc + M f + Mt + Mp
, (21)
rp,1 =a0(Mc + M f + Mt ) + rpMp
Mc + M f + Mt + Mp
, (22)
and the new distance from the counterbalancemass to the system’s center-of-mass of the systemchanges to
Lcm ,1 =M f L f + MtLcm, t + Mp Lt
Mc + M f + Mt + Mp
. (23)
To increase the rotation rate of the tethersystem and increase the distance from thesystem’s center of mass to the tether tip, thefacility climbs up the tether to thecounterbalance mass, reducing the distance fromthe counterbalance to the center-of-mass to
Lcm ,2 =MtLcm ,t + Mp Lt
Mc + M f + Mt + Mp
. (24)
By conservation of angular momentum, theangular velocity will increase to a new value of
ω2 = ω0
Lcm ,1Mc + (Lf − Lcm ,1)M f +(Lcm ,t − Lcm,1)Mt + (Lt − Lcm ,1)Mp
Lcm,2 M f + (Lcm,t − Lcm ,2 )Mt
+ (Lt − Lcm,2 )Mp
(25)
and the payload will then have a velocity
relative to the center-of-mass of
vt ,2 = ω2(Lt − Lcm ,2 ). (26)
If the initial orbit parameters, tether lengths,and facility and tether masses are chosenproperly, then v t,2 can be made equal to theperigee velocity of the tether system and thedistance from the center of mass to the payloadcan be made equal to the perigee altitude. Whenthe tether returns to its perigee it can thendeposit the payload on the surface of the Moonand simultaneously pick up a payload to bethrown back to Earth.
Lunavator™ DesignUsing the equations given above, we have
found the following first-order design for aLunavator™ capable of catching payloads fromminimal-energy lunar transfer orbits anddepositing them on the surface of the Moon:
Table 2: Baseline Lunavator™ Design
Payload Trajectory:• mass Mp = 2500 kg• perigee altitude h p = 328.23 km• Moon-relative energy C3,M = 0.719 km2/s2
Lunavator ™ : • tether length L = 200 km• counterbalance mass Mc = 15,000 kg• facility mass Mf = 15,000 kg• tether mass Mt = 11,765 kg• Total Mass M = 41,765 kg
= 16.7 x payload mass• Orbit Before Catch:
central facility position Lf = 155 kmtether tip velocity V t,0 = 0.748 km/srotation rate ω 0 = 0.00566 rad/scircular orbit altitude h p,0 = 170.5 km
• Orbit After Catch : perigee altitude h p,0 = 178 km,apogee altitude h a,0 = 411.8 kmeccentricity e0 = 0.0575
After catching the payload, the central facilityclimbs up the tether to the counterbalance mass,changing the rotation rate to:• adjusted rotation rate ω 0 = 0.00929rad/s• adjusted tip velocity V t,2 = 1.645 km/s
Payload Delivery:• drop-off altitude h = 1 km
(top of a lunar mountain)• velocity w.r.t. surface v = 0 m/s
Figure 7. Lunavator™ orbits before and afterpayload capture.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
12
Lunavator™ Orbit: Polar vs. EquatorialIn order to provide the most consistent
transfer scenarios, it is desirable to place theLunavator™ into either a polar or equatoriallunar orbit. Each choice has relative advantagesand drawbacks, but both are viable options.
Equatorial Lunar OrbitThe primary advantage of an equatorial orbit
for the Lunavator™ is that equatorial lunar orbitsare relatively stable. An equatorial Lunavator™,however, would only be able to service traffic tobases on the lunar equator. Because the lunarequatorial plane is tilted with respect to theEarth’s equatorial plane, a payload boosted bythe Earth-orbit tether facility will require a ∆Vmaneuver to bend its trajectory into the lunarequatorial plane. This ∆V can be provided eitherusing a small rocket thrust or a lunar “slingshot”maneuver. These options will be discussed inmore detail in a following section.
Polar Lunar OrbitA polar orbit would be preferable for the
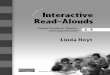
Lunavator™ for several reasons. First, directtransfers to polar lunar trajectories are possiblewith little or no propellant expenditure required.Second, because a polar lunar orbit will remainoriented in the same direction while the Moonrotates inside of it, a polar Lunavator™ couldservice traffic to any point on the surface of theMoon, including the potentially ice-rich lunarpoles. Polar lunar orbits, however, are unstable.The odd-harmonics of the Moon’s potential causea circular, low polar orbit to become eccentric, asillustrated in Figure 8. Eventually, theeccentricity becomes large enough that theperilune is at or below the lunar surface. For the178 km circular orbit, the rate of eccentricitygrowth is approximately 0.00088 per day.
Fortunately, the techniques of orbitalmodification using tether reeling, proposed byMartínez-Sánchez and Gavit11 and by Landis13
may provide a means of stabilizing the orbit ofthe Lunavator™ without requiring expenditure ofpropellant. Tether reeling can add or removeenergy from a tether’s orbit by working againstthe non-linearity of a gravitational field. Thebasic concept of orbital modification using tetherreeling is illustrated in Figure 9. When a tetheris near the apoapsis of its orbit, the tidal forceson the tether are low. When it is near periapsis,the tidal forces on the tether are high. If it isdesired to reduce the eccentricity of the tether’sorbit, then the tether can be reeled in when it isnear apoapsis, under low tension, and thenallowed to unreel under higher tension when it isat periapsis. Since the tidal forces that cause thetether tension are, to first order, proportional tothe inverse radial distance cubed, more energy isdissipated as the tether is unreeled at periapsisthan is restored to the tether’s orbit when it isreeled back in at apoapsis. Thus, energy isremoved from the orbit. Conversely, energy canbe added to the orbit by reeling in at periapsisand reeling out at apoapsis. Although energy isremoved (or added) to the orbit by the reelingmaneuvers, the orbital angular momentum of theorbit does not change. Thus the eccentricity of theorbit can be changed.
The theories developed in references 11 and13 assumed that the tether is hanging (rotatingonce per orbit). Because the Lunavator™ will berotating several times per orbit, we haveextended the theory to apply to rapidly rotating
Figure 8. Evolution of the eccentricity of an initiallycircular 178 km polar lunar orbit, without tether reeling.
Figure 9. Schematic of tether reeling maneuver toreduce orbital eccentricity.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
13
tethers.12 Using a tether reeling scheme in whichthe tether is reeled in and out once per orbit asshown in Figure 9, we find that a reeling rate of1 m/s will reduce the eccentricity of theLunavator™’s orbit by 0.0011 per day, whichshould be more than enough to counteract theeffects of lunar perturbations to the tether’s orbit.Thus tether reeling may provide a means ofstabilizing the orbit of a polar Lunavator™
without requiring propellant expenditure. Thistether reeling, however, would add additionalcomplexity to the system.
Cislunar System SimulationsTether System Modeling
In order to verify the design of the orbitaldynamics of the Cislunar Tether TransportSystem, we have developed a numericalsimulation called “TetherSim” that includes:
• The 3D orbital mechanics of the tethers andpayloads in the Earth-Moon system, includingthe effects of Earth oblateness, using Runge-Kutta integration of Cowell’s method.
• Modeling of the dynamical behavior of thetethers, using a bead-and-spring model similarto that developed by Kim and Vadali.14
• Modeling of the electrodynamic interaction ofthe Earth-orbit tether with the ionosphere.
Using this simulation tool, we have developed ascenario for transferring a payload from a circularlow-LEO orbit to the surface of the Moon usingthe tether system designs outlined above. Wehave found that for an average transfer scenario,mid-course trajectory corrections of approx-imately 25 m/s are necessary to target thepayload into the desired polar lunar trajectory to
enable rendezvous with the Lunavator™. Asimulation of a transfer from LEO to the surface ofthe Moon can be viewed at www.tethers.com.
Targeting the Lunar TransferIn addition to the modeling conducted with
TetherSim, we have also conducted a study of theEarth-Moon transfer to verify that the payloadcan be targeted to arrive at the Moon in theproper plane to rendezvous with the Lunavator™.This study was performed with the MAESTROcode,15 which includes the effects of luni-solarperturbations as well as the oblateness of theEarth. In this work we studied targeting to bothequatorial and polar lunar trajectories.
Transfer to Equatorial Lunar TrajectoriesTransfer of a payload from an equatorial
Earth trajectory to an equatorial lunar trajectorycan be achieved without propellant expenditure,but this requires use of a one-month “resonancehop” transfer, as illustrated in Figure 10. In aresonance hop maneuver, the payload is sent on atrajectory that passes the Moon in such a waythat the lunar gravitational field slingshots thepayload’s orbit into a one-month Earth orbit thatreturns to the Moon in the lunar equatorial plane.Using MAESTRO, we have developed a lunartransfer scenario that achieves this maneuver.
In order to avoid the one-month transfer time,we can instead use a small impulsive thrust asthe payload crosses the lunar equator to bend itstrajectory into the equatorial plane. A patched-conic analysis of such a transfer predicts thatsuch a maneuver would require 98 to 135 m/s of∆V. However, our numerical simulations of thetransfer revealed that under most conditions,luni-solar perturbations of the payload’strajectory will perform much of the neededbending for us, and the velocity impulse needed toplace the payload in a lunar equatorial trajectoryis only about 25 m/s. Figure 11 shows the time-history of a transfer of a payload from the Earth-orbit tether boost facility to the Moon, projectedonto the Earth’s equatorial plane.
Figure 12 shows this same transfer, projectedonto the lunar equatorial plane in a Mooncentered, rotating frame, with the x-axis pointingat the Earth. The motion of the payload relativeto the lunar equator can be observed in Figure 13,which shows the trajectory projected onto thelunar x-z plane. The payload crosses the lunarequator approximately 10 hours before its closest
Figure 10. Schematic of one-month “resonance-hop”transfer to place payload in lunar equator withoutusing propellant.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
14
approach to the Moon. Figure 14, which plots theMoon-relative velocity of the payload, showsthat the payload’s velocity at the time of lunarequatorial crossing is about 925 m/s. However, aplot of the declination of the payload’s velocitywith respect to the lunar equator, shown in Figure15, reveals that that the declination of theMoon-relative velocity vector is only a fewdegrees, much less than the 18°-29° valuepredicted by a simple zero-patched conicanalysis; the Moon's (or Sun's) gravity has bentthe velocity vector closer to the lunar orbit plane.
At the time when the payload’s trajectorycrosses the lunar equator, the declination of theincoming velocity vector is only 1.52°. Thisdynamical situation permits us to bend theapproach trajectory into the lunar equator with avery small amount of impulse supplied by thespacecraft propulsion system. In the case shownhere, the amount of ∆V required is only 24.5 m/s,applied about 10 hours before closest approach tothe Moon, as the spacecraft crosses the lunarequator.
Transfer to Polar Lunar TrajectoriesFigure 16 shows a payload transfer targeted
to a polar lunar trajectory with an ascending node(with respect to the lunar prime meridian) of–100.95°. This particular trajectory is a Type II
Figure 11. Transfer of payload to lunar equatorialtrajectory, projected onto the True Earth Equator.
Figure 12. Projection of payload transfer onto LunarEquatorial Plane (Moon centered frame).
Figure 13. Projection of payload transfer onto Lunarx-z plane (Moon centered frame).
Figure 14. Moon-relative velocity of spacecraft.
Figure 15. Declination of Moon-relative velocityvector with respect to Lunar Equator.
Figure 16. Time history of an Earth-Moon transfertargeted to a polar lunar trajectory.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
15
transfer, with a central angle on the initial orbitof greater than 180°. Similar transfers can beachieved with Type I trajectories (central angleof less than 180°). Essentially, these transfers areachieved by injecting the payload into an orbitthat just reaches the Moon’s orbit near the pointwhere the Moon will cross the Earth’s equatorialplane. When the payload reaches its apogee, itis moving only a few hundred meters per second.As the payload slowly drifts towards its apogee,the Moon approaches, moving at just over 1 km/s.The Moon then “captures” the payload, pulling itinto a trajectory that is just barely hyperbolicrelative to the Moon.
We have found that by varying the energy ofthe translunar trajectory and adjusting theargument of perigee, it is possible to target thepayload to rendezvous with a polar orbitLunavator™ with a wide range of ascending nodepositions of the Lunavator™ orbit. Oursimulations indicate that the viable nodalpositions ranges at least ±10° from the normal tothe Earth-Moon line.
Comparison to Rocket TransportTravelling from LEO to the surface of the
Moon and back requires a total ∆V of more than10 km/s. To perform this mission using storablechemical rockets, which have an exhaustvelocity of roughly 3.5 km/s, the standard rocketequation requires that a rocket system consume apropellant mass equal to 16 times the mass of thepayload for each mission. The Cislunar TetherTransport System would require an on-orbit massof less than 28 times the payload mass, but itwould be able to transport many payloads. Inpractice, the tether system will require somepropellant for trajectory corrections andrendezvous maneuvers, but the total ∆V for thesemaneuvers will likely be less than 100 m/s. Thusa simple comparison of rocket propellant mass totether system mass indicates that the fullyreusable tether transport system could providesignificant launch mass savings after only a fewround trips. Although the development anddeployment costs associated with a tether systemwould present a larger up-front expense than arocket based system, for frequent, high-volumeround trip traffic to the Moon, a tether systemcould achieve large reductions in transportationcosts by eliminating the need to launch largequantities of propellant into Earth orbit.
Mars-Earth Tether Transport SystemArchitecture
In earlier work,6 we developed a preliminaryversion of a LEO-Lunar Tether Transport Systemin which the Earth-orbit tethers were designedto throw the payload to the Moon on a fasttrajectory. This provided short transit times andenabled a rendezvous with a standard MoravecLunar Skyhook, but, as discussed earlier, itpresented a problem in that if the payload failedto rendezvous with the tip of the Lunar Skyhook,the payload would leave the Earth-Moon systemon a hyperbolic trajectory. This raised thequestion of how far a tether in a highlyelliptical Earth orbit could throw a payload. Asimple energetics-based calculation indicatedthat the answer was “All the way to Mars.” TheMars-Earth Rapid Interplanetary TetherTransport (MERITT) System is the result. In thefollowing sections, we develop a detailed designfor a MERITT system architecture.
MERITT System DescriptionThe MERITT system consists of two rapidly
rotating tethers in highly elliptical orbits:EarthWhip around Earth and MarsWhip aroundMars. A payload capsule is launched from Earthinto a low orbit or suborbital trajectory. Thepayload is picked up by a grapple system on theEarthWhip tether as the tether nears perigeeand the tether arm nears the lowest part of itsswing. It is tossed later when the tether is stillnear perigee and the arm is near the highestpoint of its swing. The payload thus gains bothvelocity and potential energy at the expense ofthe tether system, and its resulting velocity issufficient to send it on a high-speed trajectory toMars with no onboard propulsion needed exceptfor midcourse guidance.
At Mars, the incoming payload is caught inthe vicinity of periapsis by the grapple end ofthe MarsWhip tether near the highest part of itsrotation and greatest velocity with respect toMars. The payload is released later when thetether is near periapsis and the grapple end isnear the lowest part of its swing at a velocity andaltitude which will cause the released payloadto enter the Martian atmosphere. The systemworks in both directions.
The MERITT system can give shorter triptimes with aerobraking at Mars because theincoming payload velocity is not limited by the

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
16
maximum tether tip velocity and thus payloadscan use faster interplanetary trajectories.
In the following subsections we illustrate thegeneral outlines of the system and define theterms used. This initial "feasibility" analysishas not dealt with the many problems ofinterplanetary phasing and trades. These issueswill be addressed in future papers as time andfunding allow.
Interplanetary Transfer OrbitsAs shown in Figure 17, in the frame of
reference of the Sun, acting as the central mass ofthe whole system, a payload leaves the originplanet, on a conic trajectory with a velocity voand flight path angle φo and crosses the orbit of
the destination planet with a velocity vd andflight path angle φd. Departure from the originplanet is timed so that the payload arrives atthe orbit of the destination body when thedestination body is at that point in its orbit.Many possible trajectories satisfy theseconditions, creating a trade between trip time andinitial velocity.
The classic Hohmann transfer ellipse (H) is abounding condition with the least initial velocityand longest trip time. The Hohmann transfer istangential to both the departure and destinationorbits and the transfer orbits. The direction ofthe velocity vector is the same in both orbits atthese "transfer" points and only differs inmagnitude. A ∆V change in payload velocity(usually supplied by onboard propulsion) isrequired at these points for the payload to switchfrom one trajectory to another.
Faster non-Hohmann transfers may betangential at origin, destination, or neither.They may be elliptical or hyperbolic. For a giveninjection velocity above the Hohmann minimumconstraint, the minimum-time transfer orbit isgenerally non-tangential at both ends. Anextensive discussion of the general orbit transferproblem may be found in Bate, Mueller andWhite.16
For reasons discussed below, using tethers inan elliptical orbit with a fixed tip velocity topropel payloads results in an injection velocityconstrained to the vector sum of a hyperbolicexcess velocity of the released payload and theorbital velocity of the origin planet. When a
H
2
apoapsis
Mc
Mo
Md
φd
vo
vd
Hohmann transfer
Fast non-H transfer
Fasternon-H transfer
Hohmannperiapsis
φοlocal horizon
Figure 17. General Orbit Transfer Trajectories.
Initialtether orbit
Final tether orbit
Path of payload
counterweight
payload pickup
Final Payloadtrajectory
Center ofmass shifts down, slows
Path of loaded c.o.m.
Unloaded center of mass velocity slows and periapsis shifts down
Periapsisshiftsdown
Figure 18. General geometry of tether pickup and throw orbital injection.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
17
tether only is used to receive the payload, asimilar constraint exists on the destination end;the incoming trajectory is a hyperbola and theperiapsis velocity of the hyperbolic orbit mustnot exceed what the tether can handle. Thisperiapsis velocity is determined by the vectorsum of the orbital velocity of the destinationplanet, that of the intersecting payload orbit atthe intersection, and the fall through thegravitational field of the destination planet.
When passage through the atmosphere ofthe destination planet (aerobraking) is used toremove some of the incoming velocity, theconstraint becomes an engineering issue of howmuch velocity can be lost in the atmosphericpassage. Experience with the Apollo missionreturns (circa 12 km/s) and the Mars Pathfinderlanding indicates that with proper design, muchmore velocity can be dissipated than is requiredto assist tether capture.
Real passages through space take place inthree dimensions. To the first order, however,transfer orbits are constrained to a planeincorporating the Sun, the origin planet at launchand the destination planet at arrival. Theinjection vector must occur in this plane, or closeenough to it that on-board payload propulsioncan compensate for any differences. This analysisconsiders only coplanar trajectories, but, asdiscussed later, this is not a great handicap.
As the payload moves out from the influenceof the mass of the origin planet, its trajectorybecomes more and more influenced by the mass ofthe Sun, until the origin planet mass can beessentially neglected. Likewise, inboundpayloads become more and more influenced by thedestination planet mass until the mass of the Sunmay be neglected. For first order Kepleriananalysis it is customary to treat the change ofinfluence as if it occurred at a single point, calledthe patch point. At this point, a coordinatetransformation is made.
Payload Pickup and InjectionFigure 18 shows the general geometry of a
tether picking up a payload from a suborbitaltrajectory at a point just outside the atmosphereof the origin planet and injecting it into aninterplanetary transit trajectory. The payload ispicked up, swung around the tether's center of
mass along the circle as it moves along its orbit,and is released from the tip of the tether near thetop of the circle. In the process, the tether centerof mass loses both altitude and velocity,representing the loss of energy by the tether tothe payload. This energy loss may be made uplater by propulsion at the tether center and/or inthe reverse process of catching incomingpayloads.
Around the time of pick-up, the trajectory ofthe payload must be of equal velocity and shouldbe very nearly tangential (no radial motion) tothe circle of motion of the tether tip in the tetherframe of reference. This tangential conditionincreases the time for a docking maneuver to beconsummated. It is easy to see how this conditionmay be satisfied by rendezvous at the mutualapsides of the tether orbit and the payloadpickup orbit, but other, more complex trajectorieswork as well. It is not a requirement, however,that the tether plane of rotation, the tetherorbit, and the payload pickup orbit be coplanar.The mutual velocity vector at pick-up isessentially a straight line, and an infinite numberof curves may be tangent to that line. The tetherrendezvous acts as a kind of patch point, as theplane of the tether’s rotation becomes dominant.The practical effect of this is to allowconsiderable leeway in rendezvous conditions. Italso means that the kind of two dimensionalanalysis presented here has a wide range ofvalidity.
Capturing of an incoming payload isessentially the time reversal of the outgoingscenario; the best place to add hyperbolic excessvelocity is also the best place to subtract it. Ifthe tether orbital period is an integral multipleof the rotation period following release of apayload, the tip will be pointed at the zenith atperiapsis and the capture will be the mirrorimage of the release.
Capturing a payload after a pass through thedestination body's atmosphere is more complexthan a periapsis capture, but involves the sameprinciple: matching the flight path angle of thepayload exiting trajectory to the tether flightpath angle at the moment of capture and thevelocity to the vector sum of the tether velocityand tip velocity. Aerodynamic lift and energymanagement during the passage through theatmosphere provide propellant-free opportu-nities to accomplish this.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
18
There is a trade in aerobraking capturebetween momentum gain by the capturing tetherand mission redundancy. To make up formomentum loss from outgoing payloads, thetether would like to capture incoming payloadsat similar velocities. That, however, involveshyperbolic trajectories in which, if the payloadis not captured, it is lost in space. Also, in theearly operations before extensive ballast mass isaccumulated, care must be taken that the tetheritself is not accelerated to hyperbolic velocitiesas a result of the momentum exchange.
Payload ReleaseThe release orbit is tangential to the tether
circle in the tether frame of reference bydefinition, but it is not necessarily tangential tothe trajectory in the frame of reference of theorigin planet. The injection velocity vector issimply the vector sum of the motion of the tethertip and the tether center, displaced to thelocation of the tether tip. Note in the third partof Figure 18 that this does not generally lie alongthe radius to the tether center of mass. Formaximum velocity, if one picks up the payload attether periapsis, one must wait for the tether toswing the payload around to a point where its tipvelocity vector is near parallel to the tethercenter of mass orbital velocity vector. By thistime, the tether has moved significantly beyondperiapsis, and there will be a significant flightpath angle, which both orbits will share at theinstant of release. Large variations from thisscenario will result in significant velocity losses,but velocity management in this manner couldprove useful. If, on the other hand, maximumvelocity transfer and minimum tether orbitperiapsis rotation is desired, the payload can beretained and the tether arm length or periodadjusted to release the payload in a purelyazimuthal direction at the next periapsis.
Rendezvous of Grapple with PayloadThe seemingly difficult problem of achieving
rendezvous of the tether tip and payload isnearly identical to a similar problem solveddaily by human beings at circuses around theworld. The grapple mechanism on the end of arotating tether is typically subjected to acentrifugal acceleration of one gee by the rotationof the tether. Although the grapple velocityvector direction is changing rapidly, its speed isconstant and chosen to be the same speed as thepayload, which is moving at nearly constant
velocity in its separate free fall suborbitaltrajectory. The timing of the positions of thetether tip and the payload needs to be such thatthey are close to the same place (within a fewmeters) at close to the same time (within a fewseconds), so their relative spacing and velocitiesare such that the grapple can compensate for anydifferences. This situation is nearly identical tothe problem of two trapeze artists timing theswings of their separate trapeze bars so that thatthe "catcher," being supported in the 1 geegravity field of the Earth by his bar, meets upwith and grasps the "payload" after she has letgo of her bar and is in a "free fall" trajectoryaccelerating with respect to the "catcher" at onegee. They time their swings, of course, so thatthey meet near the instant when both are at nearzero relative velocity. The tether grapplesystem will have the advantages over the humangrapple system of GPS guidance, radar Dopplerand proximity sensors, onboard divert thrusters,electronic synapses and metallic grapples, whichshould insure that its catching performance iscomparable to or better than the demonstratedhuman performance.
An essential first step in the development ofthe MERITT system would be the construction andflight test of a rotating tether-grapple system inLEO, having it demonstrate that it canaccurately toss a dummy payload into a carefullyselected orbit such that n orbits later the twomeet again under conditions that will allow thegrapple to catch the payload once again.
The Automated Rendezvous and Capture(AR&C) Project Office at Marshal Space FlightCenter (MFSC) has been briefed on the AR&Crequirements for the capture of a payload by agrapple vehicle at the end of a tether with a one-gee acceleration tip environment. MSFC has beenworking AR&C for over six years and has a greatdeal of experience in this area. It is their opinion[14] that their present Shuttle-tested [STS-87 &STS-95] Video Guidance Sensor (VGS) hardware,and Guidance, Global Positioning System (GPS)Relative Navigation, and Guidance, Navigationand Control (GN&C) software, should, withsufficient funding, be able to be modified for thistether application.
Tether ConsiderationsFor a tether transport system to be
economically advantageous, it must be capable of

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
19
handling frequent traffic for many years despitedegradation due to impacts by meteorites andspace debris. Fortunately, a survivable tetherdesign exists, called the Hoytether™, which canbalance the requirements of low weight and longlife.17 As shown in Figure 19, the Hoytether™ isan open net structure where the primary loadbearing lines are interlinked by redundantsecondary lines. The secondary lines are designedto be slack initially, so that the structure will notcollapse under load. If a primary line breaks,however, the secondary lines become engaged andtake up the load.
Note that four secondary line segmentsreplace each cut primary line segment, so thattheir cross-sectional area need only be 0.25 of theprimary line area to carry the same load.Typically, however, the secondary lines arechosen to have a cross-sectional area of 0.4 to 0.5of the primary line area, so as to better cope withmultiple primary and secondary line cuts in thesame region of the tether.
This redundant linkage enables the structureto redistribute loads around primary segmentsthat fail due to meteorite strikes or materialfailure. Consequently, the Hoytether™ structurecan be loaded at high stress levels, yet retain ahigh margin of safety.18
Tether Mass RatiosAssuming that the grapple on the end of the
tether masses 20% of the payload mass, we canuse Eqn. (1) to calculate the mass ratio of a onearm Spectra® 2000 Hoytether™ to the payload itis handling, assuming various different safetyfactors and various different tether tipvelocities, to be:
Table 3: Ratio of Spectra™ 2000 Tether Material Mass toPayload Mass (Grapple Mass 20% of Payload Mass)
Tether Material Safety Factor (F) 1.75 2.0 2.4 3.0
Tip Speed V T 1.5 km/s 2.2 2.5 3.4 4.92.0 km/s 3.7 4.7 6.4 10.02.5 km/s 8.0 11.0 17.0 30.0
From this table we can see that by using Spectra™
2000, we can achieve tether tip velocities of 2.0km/s with reasonable tether mass ratios (<10)and good safety factors. Higher tip velocitiesthan 2.0 km/s are achievable using higher massratios, lower safety factors, and strongermaterials.
Tether SurvivabilityThere are many objects in Earth space,
ranging from micrometeorites to operationalspacecraft with 10 meter wide solar electricarrays. We can design interconnected multiplestrand open net Hoytether™ structures that canreliably (>99.9%) survive in space for decadesdespite impacts by objects up to 30 cm (1 foot) or soin size.
Objects larger than 30 cm will impact all thestrands at one time, cutting the tether. Theselarge objects could include operational spacecraft,which would also be damaged by the impact.Objects larger than 30 cm are all known andtracked by the U.S. Space Command. There areabout 6000 such objects in low and medium Earthorbit, of which an estimated 600 will beoperational spacecraft in the 2005 time frame.
Depending upon the choice of the EarthWhiporbit, calculations show that there is a small(<1%) but finite chance of the EarthWhip tetherstriking one of the 600 operational spacecraft. Itwill therefore be incumbent on the tether systemfabricators and operators to produce EarthWhiptether systems that maintain an accurateinventory of the known large objects and controlthe tether system center of mass orbital altitudeand phase, the tether rotation rate and phase,and the tether libration and vibrationamplitudes and phases, to insure that the tethersystem components do not penetrate a volume of"protected space" around these orbiting objects.
PrimaryLines
SecondaryLines(initiallyunstressed)
0.2 to10's of meters
0.1- 1 meter
SeveredPrimary
Line
Effects ofDamageLocalized
a. b.
Second Level of Secondary Lines Redistributes Load Back to Undamaged Portion ofPrimary Line
First Level ofSecondary LinesRedistributes Load to Adjacent Nodes
c.
Figure 19. The Hoytether™ design and itsresponse to a cut line.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
20
MERITT Modeling Calculations of the MERITT systemperformance were performed using the mathe-matical modeling software package “TK Solver”which allows the user to type in the relevantequations and get results without having to solvethe model algebraically or structure it as aprocedure, as long as the number of independentrelationships equals the number of variables.This is very useful in a complex system when onemay wish to constrain various variables forwhich it would be difficult, if not impossible, tosolve and to perform numerical experiments toinvestigate the behavior of the system.
Two versions of a tether based interplanetarytransfer system are being worked on, one fortether-only transfers and the other incorporatingan aerobraking pass at the destination body toaid in capture and rotation of the line of apsides.It should be emphasized that the resultspresented here are very preliminary and muchremains to be done with the software. Because ofthe ongoing work and the growing number ofvariables and lines of code, we will not try to gothrough this line by line here. Questionsconcerning the code should be referred to GeraldNordley at the above address.
The general architecture of the models issequential. A payload is picked up from atrajectory at the origin planet, and added to arotating tether in a highly elliptical orbitaround the origin planet. The pickup isaccomplished by matching the position andvelocity of the grapple end of the unloadedrotating tether to payload position and velocity.
This addition of the payload mass to one endof the tether shifts the center of mass of thetether toward the payload. The tether used inthese examples is modeled as a rigid line withtwo arms, a grapple, a counterweight and acentral mass. The tether is assumed to bedesigned for a payload with a given mass and a"safety factor" of two, as described in Hoyt andForward18 and to be dynamically symmetricalwith a payload of that mass attached.
The mass distribution in the arms of thetether was determined by dividing the tetherinto ten segments, each massive enough to support
the mass outward from its center; this was notneeded for the loaded symmetric tether casespresented here, but will be useful in dealing withasymmetric counterweighted tethers. The totalmass of each tether arm was determined fromEqn. (1). The continuously tapered mass definedby Eqn. (1) was found to differ by only a fewpercent from the summed segment mass of the 10segment tether model used in the analysis, andthe segment masses were adjusted accordinglyuntil the summed mass fit the equation. Thesmall size of this adjustment, incidentally, can betaken as independent confirmation of Eqn. (1).
We ended up designing many candidates forthe EarthWhip and MarsWhip tethers, fromsome with very large central station masses thatwere almost unaffected by the pickup or toss of apayload, to those that were so light that the tossof an outgoing payload caused their orbits to shiftenough that the tether tip hit the planetaryatmospheres, or the catch of an incoming payloadsent the tether (and payload) into an escapetrajectory from the planet. After many trials, wefound some examples of tethers that weremassive enough that they could toss and catchpayloads without shifting into undesirableorbits, but didn't mass too much more than thepayloads they could handle. The tethers areassumed to be made of Spectra™ 2000 materialbraided into a Hoytube™ structure with a safetyfactor of 2. The tether design consists of a largecentral station with a solar array power supply,winches, and control systems, plus any ballastmass needed to bring the mass of the total systemup to the desired final mass value. From thetether central station is extended two similartethers, with a taper and mass determined byEqn. (1) according to the loaded tip velocitydesired. At the end of the tethers are grapplesthat each mass 20% of the payloads to behandled. To simplify this initial analysis, weassumed that one grapple is holding a dummypayload with a mass equal to the activepayload, so that after the grapple on the activearm captures a payload, the tether system issymmetrically balanced. Later, more complex,analyses will probably determine that a one armtether system will do the job equally well andcost less.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
21
Shift in Tether Center of MassThe shift of the center of mass of the
tether system when a payload was attachedor released was determined by adding themoments of the unloaded tether about theloaded center of symmetry and dividing by theunloaded mass.
Figure 20 illustrates the four generalcircumstances of tether operations: originpickup, origin release, destination capture anddestination release. The shift of the center ofmass of the tether system when a payload wasattached or released was determined byadding the moments of the unloaded tetherabout the loaded center of symmetry anddividing by the unloaded mass. Figure 20illustrates the four general circumstances oftether operations; origin pickup, originrelease, destination capture and destinationrelease. It turns out that the dynamics of anideal rigid tether system with a givenpayload can be fairly well modeled by simplyaccounting for the change in the position andmotion of the tether's center of mass as thepayload is caught and released.
When the payload is caught, the center ofmass shifts toward the payload and thetether assumes a symmetrical state. Thevelocity of the tip around the loaded center ofmass is simply its velocity around theunloaded center of mass minus the velocity ofthe point which became the new center of massabout the old center of mass. The change in thetether orbital vector is fully described by thesum of the vector of the old center of mass andthe vector at the time of capture or release ofthe point that becomes the new center of massrelative to the old center of mass. Since thetether loses altitude with both the catch andthe throw, its initial altitude must be highenough so that it does not enter theatmosphere after it throws the payload.
Once the payload is released, its velocityand position are converted to Keplerianorbital elements which are propagated to theoutgoing patch point. At this point, they areconverted back to position and velocity, andtransformed to the Sun frame of reference.
The velocity of insertion into the orbit inthe Sun's frame of reference is essentially thevector sum of the hyperbolic excess velocitywith respect to the origin planet and the
Destination tether release detail
rdr horizon
rdf horizon
δudr vtr
rr horizon
Ld
vdr
qdf
ϕdf
rr
Lf = Ld + C
qdr vdf = vdr + vc
rdf
rdr
vf = vdr + vt
ϕf
vc
vdr loaded tether tip circle
unloaded tether tip circle
∆udr
C
δuorr
Origin tether release detail
vor
vc
ror
vr = vor + vt
qof r r
∆uor
loaded tether tip circle
unloaded tether tip circle
ϕor
Lo
q or
ϕr
Lof = Lo + C
vtr
vo r ϕof
rof
rr horizon
ro f horizon
ro r horizon vc
vof = vor + vc
unloaded tether tip circle
Origin tether capture detail
δuoc
voc
vi = voi - vti
ϕoc
roc horizon
roi horizon
vti rc horizon
Loi ϕoi
vc
ϕi
vo i qoi - π
loaded tether tip circle
qoc - π
voi
C
v t c = v t i - vc
rc
rocroi
∆uoc
Lo = Loi - C
vi = vdi + vti
Destination tether capture detail
rc
ric
vdc
ϕo
qdi qdc
δudc
vdi
vti r c horizon
roc
unloaded tether tip circle
loaded tether tip circle
vc
C
ϕi
vdi
qdi
ri c horizon
rdc horizon
Li
ϕi
∆udc
Ld
Figure 20. Tether Capture/Release Operations.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
22
origin planet’s orbital velocity about the Sun.This vector is done in polar coordinates, and theangle portion of this vector in the origin planetframe is, at this point, a free choice. For now, anestimate or “guess” of this quantity is made. Theresulting vector is then converted into Sun frameorbital elements and propagated to the patchpoint near the orbit of the destination planet.There, it is transformed into the destinationplanet coordinates.
Tether-Only Incoming Payload CaptureFor the tether-only capture scenario, the
velocity and radius of the tip of the tetherorbiting the destination mass are calculated anditeratively matched to the velocity of thepayload on an orbit approaching the destinationplanet, as shown in Figure 21.
The distance of the patch point and therelative velocity there provide the energy of theorbit. The radius and velocity of the tether tipprovide another pair of numbers and this issufficient to define an approach orbit when theymatch. There are a large number of freeparameters in this situation with respect to the
tether orbit which can be varied to produce acapture. There is a good news/bad news aspect tothis. The difficulty is that the problem is notself- defined and to make the model work, somearbitrary choices must be made. The good news isthat this means there is a fair amount ofoperational flexibility in the problem andvarious criteria can be favored and trades made.
In this work, we have generally tried toselect near-resonant tether orbits that might be“tied” to geopotential features so that theyprecess at the local solar rate and thus maintaintheir apsidal orientation with respect to theplanet-Sun line. The Russian Molniyacommunications satellites about Earth and theMars Global Surveyor spacecraft use such orbits.
The Sun-referenced arguments of periapsis,ω, in the figures are technically not constants, butcan be treated as such for short spans of timewhen apsidal precession nearly cancels theangular rate of the planet's orbit about the Sun .
The fastest transfer times are generallyassociated with the fastest usable periapsisvelocities. These are found when the tether is at
Tether center of massorbit
To Sun
Payload orbit after release
γ r
Payload periapsis entry option
δu
c = capture at peripasis r = release
r
Payloadon Tether
Destinationbody orbit
Destinationbody orbit
Payload Incoming trajectory
Payload hyperbolic asymtote
Tether center of mass orbit
∆q
-u ∞
ur
Ai
ω i = ωT
πT
Figure 21. Tether-Only Capture Scenario.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
23
periapsis and its tip at the zenith of its swing. Inone approach to this model, these tetherconditions are used to set the periapsis velocityand radius of the incoming orbit. This, in turn,defines the relative velocity at the patch point,and the origin planet injection angle can beiterated to produce a Sun frame orbit thatproduces that relative velocity at thedestination planet patch point.
Aerobraking Payload Capture In the case of using aerobraking in the
planetary atmosphere, the injection angle can beoptimized for minimum transfer time. As shownin Figure 22, the radius at which the atmosphereof the destination planet is dense enough tosustain an aerodynamic trajectory is used todefine the periapsis of the approach orbit; thereis no velocity limit.
In a similar manner, the tether tip at anestimated capture position and velocity, togetherwith the radius at which the outgoing payloadresumes a ballistic trajectory define an exit orbitwhich results in tether capture. The difference inthe periapsis velocity of this orbit and theperiapsis velocity of the inbound trajectory is thevelocity that must be dissipated during the
aerodynamic maneuver. For Mars boundtrajectories, this aerobraking ∆V is on the orderof 5 km/s, as compared to direct descent ∆V’s of 9km to 15 km/s. Also, payloads meant to bereleased into suborbital trajectories already carryheat shields, though designed for lower initialvelocities.
After the tether tip and the incomingpayload are iteratively matched in time,position and velocity, the center of mass orbit ofthe loaded tether is propagated to the releasepoint. This is another free choice, and theposition of the tether arm at release determinesboth the resulting payload and tether orbit. Inthis preliminary study, care was taken to ensurethat the released payload did enter the planet'satmosphere, the tether tip did not, and that thetether was not boosted into an escape orbit.
Initial Planet Whip AnalysisWe first carried out analyses of a number of
MERITT missions using a wide range ofassumptions for the tether tip speed and whetheror not aerobraking was used. The trip times forthe various scenarios are shown in Table 4. As canbe seen from Table 4, the system has significant
Tether center of mass orbit
c = capture r = release
Destinationbody orbit
Destinationbodyorbit
γ r ∆q
∆u
δu
q uxc
δuc
Aerobraking∆ω , ∆v
Tether center of mass orbit
Payload hyperbolic asymtote
Ai
-ui ∞
Payload Incoming trajectory
ω i
To Sun
Payload orbit after release. Periapsis entry option
Payloadon Tether uTc
Tether orbitperiapsis
ωT
πT
πx
ωx
c
r
γ c
Figure 22. Aerobraking Tether Capture.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
24
growth potential. If more massive tethers areused, or stronger materials become available, thetether tip speeds can be increased, cutting thetransit time even further. The transit times inTable 4 give the number of days from payloadpickup at one planet until payload reentry at theother planet, and include tether "hang time" andcoast of the payload between the patch pointsand the planets. Faster transit times can be madewith higher energy initial orbits for the payloadand the tether. With a 2.5 km/s tip speed on thePlanetWhip tethers and using aerobraking atMars (see Figure 22), the Earth orbit-Mars orbittransit time can be made about 94 days.
PlanetWhip Analysis
The periapsis of the tether orbit is pushedcounterclockwise for where a tether-only capturewould occur by the angular distance needed foraerobraking and the periapsis rotations caused bycapturing and releasing the payload at non-zerotrue anomalies. If the periapsis is shiftedenough, the tether may be able to inject apayload on a return trajectory without waitingfor many months, or using substantial amounts ofpropellant to produce the needed alignment.
Detailed MERITT ExampleThere are a large number of variables in the
MERITT system concept, and many of thosevariables can be freely chosen at the start of thesystem design. We have carried out dozens ofcomplete round-trip scenarios under variousdifferent assumptions, such as: aerobraking beforetether catch versus direct tether-to-tether catch;sub-, circular, and elliptical initial and finalpayload orbits; 1.5, 2.0, 2.5 and higher tether tipvelocities; large, small and minimum tethercentral facility masses; etc. We will present herejust one of the many possible MERITT scenariosusing finite mass EarthWhip and MarsWhiptethers, but do it in extensive detail so the readercan understand where the broad assumptions are,while at the same time appreciating theaccuracy of the simulations between the broad
assumptions. In most cases, the matches betweenthe payload trajectories and the tether tiptrajectories are accurate to 3 and 4 decimal places.
Figure 23 is a diagram showing how a singletether toss and catch system would work on eitherthe Earth or Mars end of the MERITT system, fora finite mass PlanetWhip tether. The incomingpayload brushes the upper atmosphere of theplanet, slows a little using aerobraking, and iscaught by a rotating tether in a low energyelliptical orbit. After the payload is caught, thecenter of mass of the tether shifts and theeffective length of the tether from center of massto the payload catching tip is shortened, whichis the reason for the two different radii circles forthe rotating tether in the diagram. The orbit ofthe tether center of mass changes from a lowenergy elliptical orbit to a higher energyelliptical orbit with its periapsis shifted withrespect to the initial orbit. The tether orbitwould thus oscillate between two states:
1) a low energy state wherein it would beprepared to absorb the energy from an incomingpayload without becoming hyperbolic
and
2) a high energy state for tossing an outgoingpayload.
Table 4.Potential MERITT Interplanetary Transfer Times
Tip System Transfer Tether- Aero-Speed Mass direction only braking(km/s) Ratio From->To (days) (days)
1.5 15x Earth->Mars 188 162Mars->Earth 187 168
2.0 15x Earth->Mars 155 116Mars->Earth 155 137
2.5 30x Earth->Mars 133 94Mars->Earth 142 126

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
25
The scenario we will describe usesEarthWhip and MarsWhip tethers of nearminimum mass made of Spectra™ 2000 with a tipspeed of 2.0 km/s. Because they have small totalmasses, the toss and catch operationssignificantly affect the tether rotation speed,center of mass, and orbital parameters, all ofwhich are taken into account in the simulation.The payload is assumed to be initially launchedfrom Earth into a suborbital trajectory todemonstrate to the reader that the MERITTsystem has the capability to supply a l l of theenergy and momentum needed to move thepayload from the upper atmosphere of the Earth
to the upper atmosphere of Mars and back again.We don't have ask the payload to climb to nearlyEarth escape before the MERITT system takesover.
In practice, it would probably be wise to havethe payload start off in an initial low circularorbit. The energy needed to put the payload intoa low circular orbit is not that much greater thanthe energy needed to put the payload into asuborbital trajectory with an apogee just outsidethe Earth's atmosphere. The circular orbit optionalso has the advantage that there would beplenty of time to adjust the payload orbit to
Hyperbolicasymptoteof outboundpayload orbit
Tether Orbit Outbound StateHigh energy, periapsis rotated counter-clockwise
Tether Orbit Inbound StateLow energy, periapsis nearantisolar point
vu(orbit)A2
-uinf (omdi - π/2)
= π - (A2 - uinf)
∆ωa
ωi
-uTc
∆uTc
∏c∏r
Planet orbit
2π + A1
∏x
∏i
Inboundtrajectory
Outboundtrajectory
vu(rel) = vu(orbit)-vu(planet)
Trajectory of patch point
A2
(aerobraking)
TetherPeriapsisafter incoming release(ready foroutbound pickup)
Tether Periapsis at capture(following last outbound releaseand maneuvers) Periapsis of
aerobrakingexit orbit
∏r
Hyperbolicasymptoteof inboundpayload orbit
ToSun
vu(planet)
vr(sun) =vr(orbit)-vr(planet) vi2 = vu
2 + vr2
∆ωr
uxcPeriapsis ofincoming orbit
Figure 23. "Planet"Whip showing catch and toss states using aerobraking.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
26
remove launch errors before the arrival of theEarthWhip tether.
In the example scenario, the payload, in itssuborbital trajectory, is picked up by theEarthWhip tether and tossed from Earth toMars. At Mars it is caught by the MarsWhiptether without the use of aerobraking, and putinto a trajectory that enters the Martianatmosphere at low velocity. Since this scenariodoes not use aerobraking, the return scenario is justthe reverse of the outgoing scenario.
Payload MassWe have chosen a canonical mass for the
payload of 1000 kg. If a larger payload mass isdesired, the masses of the tethers scaleproportionately. The scenario assumes that thepayload is passive during the catch and throwoperations. In practice, it might make sense forthe payload to have some divert rocketpropulsion capability to assist the grapple duringthe catch operations. In any case, the payloadwill need some divert rocket propulsioncapability to be used at the midpoint of thetransfer trajectory to correct for injection errors.
Tether MassBoth the EarthWhip and MarsWhip tethers
were assumed to consist of a robotic centralstation, two similar tethers, two grapples at theends of the two tethers, and, to make theanalysis simpler, one grapple would be holding adummy payload so that when the active payloadis caught, the tether would be symmetricallybalanced.
The tether central station would consist of asolar electric power supply, tether winches, andcommand and control electronics. There may be noneed to use center of mass rocket propulsion forordinary tether operations. Both tethers can beadequately controlled in both their rotationalparameters and center-of-mass orbitalparameters by "gravity-gradient" propulsionforces and torques generated by changing thetether length at appropriate times in the tetherorbit. 11,13,
The EarthWhip tether would also have asmall conductive portion of the tether that woulduse electrodynamic tether propulsion,18 whereelectrical current pumped through the tetherpushes against the magnetic field of the Earth toadd or subtract both energy and angularmomentum from the EarthWhip orbital
dynamics, thus ultimately maintaining the totalenergy and angular momentum of the entireMERITT system against losses without the use ofpropellant.
The grapple mechanisms are assumed in thisscenario to mass 20% of the mass of the payload,or 200 kg for a 1000 kg payload. It is expected,however, that the grapple mass will not growproportionately as the payload mass increases tothe many tens of tons needed for crewed Marsmissions.
In the scenario presented here, it is assumedthat the grapples remain at the ends of thetethers during the rendezvous procedure. Inpractice, the grapples will contain their owntether winches powered by storage batteries, plussome form of propulsion.
As the time for capture approaches, thegrapple, under centrifugal repulsion from therotation of the tether, will release its tetherwinches, activate its propulsion system, and flyahead to the rendezvous point. It will then reelin tether as needed to counteract planetarygravity forces in order to "hover" along therendezvous trajectory, while the divert thrustersmatch velocities with the approaching payload.In this manner, the rendezvous interval can bestretched to many tens of seconds.
If needed, the rendezvous interval can beextended past the time when the tip of the tetherpasses through the rendezvous point by havingthe grapple let out tether again, while using thedivert thrusters to complete the payload capture.The grapple batteries can be recharged betweenmissions by the grapple winch motor/dynamos,by allowing the grapple winches to reel outwhile the central winches are being reeled inusing the central station power supply. Thegrapple rocket propellant will have to beresupplied either by bringing up "refueling"payloads or extracting residual fuel frompayloads about to be deorbited into a planetaryatmosphere.
For this scenario, we assumed that, whenloaded with a payload, the EarthWhip andMarsWhip tethers were rotating with a tethertip speed of VT = 2,000 m/s. The length of eachtether arm was chosen as L=400 km in order tokeep the acceleration on the payload, G=VT
2/L,near one gee. We also assumed that the totalmass of the Whips are 15,000 kg for a 1000 kg

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
27
payload (16,000 kg total). This mass includes thecentral station, both tethers, the grapples at theends of the tethers, and the dummy payloadmass. This is about the minimum tether massneeded in order for the tether center-of-massorbits to remain stable before and after a catch ofa payload with a velocity difference of 2000 m/s.
The tether material was assumed to beSpectra™ 2000 with an ultimate tensile strengthof U=4.0 GPa, a density d=970 kg/m3, and anultimate tip velocity for an untapered tether ofVU=(2U/d)1/2 =2872 m/s. The tether safetyfactor was initially chosen at F=2.0, whichresults in a engineering characteristic velocity forthe tether of VC = (2U/2d)1/2 = 2031 m/s.
Using VC and VT in Eqn. (1), we find that themass ratio of one arm of a tapered Spectra™ 2000tether is 3.841 times the mass at the tip of thetether. Since the mass at the end of the tetherconsists of the 1000 kg payload and the 200 kggrapple, the minimum total mass of one tetherarm is 4609 kg, or about 4.6 times the mass of the1000 kg payload. The amount of taper issignificant, but not large. The total cross-sectional area of the tether at the tip, where it isholding onto the payload, is 6 mm2 or 2.8 mm indiameter, while the area at the base, near thestation, is 17.3 mm2 or 4.7 mm in diameter. Thistotal cross-sectional area will be divided up bythe Hoytether™ design into a large number offiner cables.
Eqn. (1), however, applies to a rotatingtether far from a massive body. Since theEarthWhip and MarsWhip tethers are under themost stress near periapsis, when they are closestto their respective planets, we need to take intoaccount the small additional stress induced bythe gravity gradient forces of the planets, whichraises the mass to about 4750 kg for a 1000 kgpayload. We will round this up to 4800 kg for thetether material alone, corresponding to a free-space safety factor of 2.04, so that the total massof the tether plus grapple is an even 5000 kg.With each tether arm massing 5000 kg includinggrapple, one arm holding a dummy payload of1000 kg, and a total mass of 15,000 kg, the mass ofthe central station comes out at 4000 kg, which isa reasonable mass for its functions.
There are a large number of tether parametervariations that would work equally well,including shorter tethers with higher gee loadson the payloads, and more massive tethers with
higher safety factors. All of these parameterswill improve as stronger materials becomecommercially available, but the important thingto keep in mind is that the numbers used for thetethers assume the use of Spectra™ 2000, acommercial material sold in tonnage quantities asfishing nets, fishing line (SpiderWire), and kiteline (LaserPro). We don't need to invoke magicmaterials to go to Mars using tethers.
Tether Rotational ParametersWhen the EarthWhip or MarsWhip tethers
are holding onto a payload, they aresymmetrically balanced. The center-of-mass ofthe tether is at the center-of-mass of the tethercentral station. The effective arm length fromthe tether center-of-mass to the payload is400,000 m, the tip speed is exactly 2000 m/s andthe rotation period is P = 1256.64 s = 20.94 min =0.3491 hr.
When the Whips are not holding onto apayload, then the center-of-mass of the Whipshifts 26,667 m toward the dummy mass tetherarm, and the effective length of the active tetherarm becomes 426,667 m, while the effective tipvelocity at the end of this longer arm becomes2,133 m/s. (Since there is no longer a payload onthis arm, the higher tip velocity can easily behandled by the tether material.) The rotationalperiod in this state is the same, 1256.64 s.
Payload Trajectory ParametersThe Earth-launched payload trajectory
chosen for this example scenario is a suborbitaltrajectory with an apogee altitude of 203,333 m(6581.333 km radius) and a apogee velocity of7,568 m/s. The circular orbit velocity for thatradius is 7,782 m/s.
EarthWhip Before Payload PickupThe EarthWhip starts out in an unloaded
state with an effective length for its active armof 426,667 m from the center-of-rotation, a tipvelocity of 2,133 m/s and a rotational period of1256.64 s. The center-of-mass of the EarthWhipis in a highly elliptical orbit with an apogee of33,588 km (almost out to geosynchronous orbit), aneccentricity of 0.655, an orbital period of exactly 8hours, a perigee radius of 7008 km (630 kmaltitude), and a perigee velocity of 9,701 m/s.The tether rotational phase is adjusted so thatthe active tether arm is pointing straight downat perigee, with the tether tip velocity opposingthe center-of-mass velocity. The tip of the tether

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
28
is thus at an altitude of 630 km-426.7 km = 203.3km and a velocity with respect to the Earth of9,701 m/s - 2,133 m/s = 7,568 m/s, which matchesthe payload altitude and velocity.
EarthWhip After Payload PickupAfter picking up the payload, the loaded
EarthWhip tether is now symmetricallybalanced. Since the added payload had bothenergy and momentum appropriate to its positionon the rotating tether, the EarthWhip rotationangular rate does not change and the period ofrotation remains at 1257 s. The center of mass ofthe loaded EarthWhip, however, has shifted tothe center of the tether central station, so theeffective length of the loaded tether arm is nowat its design length of 400,000 km and tip velocityof 2,000 m/s. With the addition of the payload,however, the orbit of the tether center-of-masshas dropped 26.7 km to a perigee of 6981.3 km,while the perigee velocity has slowed to 9,568m/s. The apogee of the new orbit is 28,182 km andthe eccentricity is 0.603, indicating that this neworbit is less eccentric than the initial orbit due tothe payload mass being added near perigee. Theperiod is 23,197 s or 6.44 hours.
Payload TossThe catch and toss operation at the Earth
could have been arranged as shown in Figure 23,so that the payload catch was on one side of theperigee and the payload toss was on the otherside of the perigee, a half-rotation of the tetherlater (10.5 minutes). To simplify themathematics for this initial analysis, however,we assumed that the catch occurred right at theperigee, and that the tether holds onto thepayload for a full orbit. The ratio of the tethercenter-of-mass orbital period of 23,197 s is veryclose to 18.5 times the tether rotational period of1256.64 s, and by adjusting the length of thetether during the orbit, the phase of the tetherrotation can be adjusted so that the tether armholding the payload is passing through thezenith just as the tether center-of-mass reachesits perigee. The payload is thus tossed at analtitude of 603 km + 400 km =1003 km (7381 kmradius), at a toss velocity equal to the tethercenter-of-mass perigee velocity plus the tetherrotational velocity or 9,568 m/s + 2,000 m/s =11,568 m/s. In the combined catch and tossmaneuver, the payload has been given a totalvelocity increment of twice the tether tipvelocity or ∆v=4,000 m/s.
EarthWhip After Payload TossAfter tossing the payload, the EarthWhip
tether is back to its original mass. It has giventhe payload a significant fraction of its energyand momentum. At this point in the analysis, itis important to insure that no portion of thetether will intersect the upper atmosphere andcause the EarthWhip to deorbit. We haveselected the minimum total mass for theEarthWhip at 15,000 kg to insure that doesn'thappen. The new orbit for the EarthWhip tetherhas a perigee of its center of mass of 6955 km (577km altitude), apogee of 24,170 km, eccentricity of0.552, and a period of 5.37 hours. With the newperigee at 577 km altitude, even if the tetherrotational phase is not controlled, the tip of theactive arm of the tether, which is at 426.67 kmfrom the center-of-mass of the tether, does not getbelow 150 km from the surface of the Earth whereit might experience atmospheric drag. Inpractice, the phase of the tether rotation will beadjusted so that at each perigee passage, thetether arms are roughly tangent to the surface ofthe Earth so that all parts of the tether are wellabove 500 km altitude, where the air drag andtraffic concerns are much reduced.
With its new orbital parameters, theEarthWhip tether is in its "low energy" state.There are two options then possible. One optionis to keep the EarthWhip in its low energyelliptical orbit to await the arrival of anincoming payload from Mars. The EarthWhipwill then go through the reverse of the processthat it used to send the payload from Earth on itsway to Mars. In the process of capturing theincoming Mars payload, slowing it down, anddepositing it gently into the Earth's atmosphere,the EarthWhip will gain energy which will putit back into the "high energy" elliptical orbit itstarted out in. If, however, it is desired to sendanother payload out from Earth before there is anincoming payload from Mars, then the solarelectric power supply on the tether centralstation can be used to generate electrical power.This electrical power can then be used to restorethe EarthWhip to its high energy ellipticalorbit using either electrodynamic tetherpropulsion18 or gravity-gradient propulsion. 11,13
Payload Escape TrajectoryThe velocity gain of ∆v≈4,000 m/s given the
payload deep in the gravity well of Earth resultsin a hyperbolic excess velocity of 5,081 m/s. The

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
29
payload moves rapidly away from Earth and in3.3 days reaches the "patch point" on theboundary of the Earth's "sphere of influence,"where the gravity attraction of the Earth on thepayload becomes equal to the gravity attractionof the Sun on the payload. An accuratecalculation of the payload trajectory wouldinvolve including the gravity field of both theSun and the Earth (and the Moon) all along thepayload trajectory. For this simplified first-order analysis, however, we have made theassumption that we can adequately model thesituation by just using the Earth gravity fieldwhen the payload is near the Earth and only theSolar gravity field when we are far from theEarth, and that we can switch coordinate framesfrom an Earth-centered frame to a Sun-centeredframe at the "patch point" on the Earth's"sphere of influence."
Payload Interplanetary Trajectory When this transition is made at the patch
point, we find that the payload is on a Solarorbit with an eccentricity of 0.25, a periapsis of144 Gm and an apoapsis of 240 Gm. It is injectedinto that orbit at a radius of 151.3 Gm and avelocity of 32,600 m/s. (The velocity of Eartharound the Sun is 29,784 m/s.) It then coasts fromthe Earth sphere-of-influence patch point to theMars sphere-of-influence patch point, arriving atthe Mars patch point at a radius of 226.6 Gm fromthe Sun and a velocity with respect to the Sun of22,100 m/s. (The velocity of Mars in its orbit is24,129 m/s.) The elapsed time from the Earthpatch point to the Mars patch point is 148.9 days.
Payload Infall Toward MarsAt the patch point, the analysis switches to
a Mars frame of reference. The payload starts itsinfall toward Mars at a distance of 1.297 Gm fromMars and a velocity of 4,643 m/s. It is on ahyperbolic trajectory with a periapsis radius of4451 km (altitude above Mars of 1053 km) and aperiapsis velocity of 6,370 m/s. The radius ofMars is 3398 km and because of the lower gravity,the atmosphere extends out 200 km to 3598 km.The infall time is 3.02 days.
MarsWhip Before Payload CatchThe MarsWhip tether is waiting for the
arrival of the incoming high velocity payload inits "low energy" orbital state. The active tetherarm is 426,667 m long and the tip speed is 2,133m/s. The center-of-mass of the unbalanced tether
is in an orbit with a periapsis radius of 4025 km(627 km altitude), periapsis velocity of 4,236 m/s,apoapsis of 21,707 km, eccentricity of 0.687, and aperiod close to 0.5 sol. (A "sol" is a Martian dayof 88,775 s, about 39.6 minutes longer than anEarth day of 86,400 s. The sidereal sol is 88,643s.) The orbit and rotation rate of the MarsWhiptether is adjusted so that the active arm of theMarsWhip is passing through the zenith just asthe center-of-mass is passing through the perigeepoint. The grapple at the end of the active arm isthus at 4024.67+426.67 = 4,451.3 km, moving at4,236 m/s + 2,133 m/s = 6,370 m/s, the same radiusand velocity as that of the payload, ready forthe catch.
MarsWhip After Payload CatchAfter catching the payload, the MarsWhip
tether is now in a balanced configuration. Theeffective arm length is 400,000 m and the tethertip speed is 2,000 m/s. In the process of catchingthe incoming payload, the periapsis of thecenter-of-mass of the tether has shifted upward26,667 m to 4,051 km and the periapsis velocityhas increased to 4,370 m/s, while the apoapsishas risen to 37,920 km, and the eccentricity to0.807. The period is 1.04 sol.
Payload Release and DeorbitThe payload is kept for one orbit, while the
phase of the tether rotation is adjusted so thatwhen the tether center-of-mass reachesperiapsis, the active tether arm holding thepayload is approaching the nadir orientation. Ifit were kept all the way to nadir, the payloadwould reach a minimum altitude of about 250 km(3648 km radius) at a velocity with respect to theMartian surface of 4370 m/s - 2000 m/s = 2370 m/s.At 359.5 degrees (almost straight down), thiscondition is achieved to four significant figures.The payload is then moving at a flight pathangle with respect to the local horizon of 0.048radians and enters the atmosphere at a velocityof 2,442 km/s.
MarsWhip after Deorbit of PayloadAfter tossing the payload, the MarsWhip
tether is back to its original mass. The process ofcatching the high energy incoming payload, andslowing it down for a gentle reentry into theMartian atmosphere, has given the MarsWhip asignificant increase in its energy and momentum.At this point in the analysis, it is important tocheck that the MarsWhip started out with

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
30
enough total mass so that it will not be driveninto an escape orbit from Mars.
The final orbit for the tether is found to havea periapsis radius of 4078 km (676 km altitude sothat the tether tip never goes below 253 kmaltitude), a periapsis velocity of 4,503 m/s, anapoapsis radius of 115,036 km, an eccentricity of0.931, and a period of 6.65 sol. The tether remainswithin the gravity influence of Mars and is in itshigh energy state, ready to pick up a payloadlaunched in a suborbital trajectory out of theMartian atmosphere, and toss it back to Earth.
Elapsed TimeThe total elapsed transit time, from capture
of the payload at Earth to release of the payloadat Mars, is 157.9 days. This minimal massPlanetWhip scenario is almost as fast as moremassive PlanetWhip tethers since, although thesmaller mass tethers cannot use extremely high orlow eccentricity orbits without hitting theatmosphere or being thrown to escape, the timespent hanging on the tether during those longerorbit counts as well and the longer unbalancedgrapple arm of the lightweight tether lets itgrab a payload from a higher energy tether orbit.
Summary
We have developed tether system archi-tectures for Earth-Luna and Earth-Mars payloadtransport. Our analyses have concluded that theoptimum architecture for a tether systemdesigned to transfer payloads between LEO andthe lunar surface will utilize one tether facilityin an elliptical, equatorial Earth orbit and onetether in low lunar orbit. We have developed apreliminary design for a 80 km long Earth-orbittether boost facility capable of picking payloadsup from LEO and injecting them into a minimal-energy lunar transfer orbit. Using currentlyavailable tether materials, this facility wouldrequire a mass 10.5 times the mass of thepayloads it can handle. After boosting apayload, the facility can use electrodynamicpropulsion to reboost its orbit, enabling thesystem to repeatedly send payloads to the Moonwithout requiring propellant or return traffic.When the payload reaches the Moon, it will becaught and transferred to the surface by a 200 kmlong lunar tether. This tether facility will havethe capability to reposition a significant portionof its “ballast” mass along the length of thetether, enabling it to catch the payload from a
low-energy transfer trajectory and then “spin-up”so that it can deliver the payload to the Moonwith zero velocity relative to the surface. Thislunar tether facility would require a total mass ofless than 17 times the payload mass. Bothequatorial and polar lunar orbits are feasible forthe Lunavator™. Using two different numericalsimulations, we have tested the feasibility ofthis design and developed scenarios fortransferring payloads from a low-LEO orbit tothe surface of the Moon, with only 25 m/s of ∆Vneeded for small trajectory corrections. Thus, itappears feasible to construct a Cislunar TetherTransport System with a total on-orbit massrequirement of less than 28 times the mass of thepayloads it can handle, and this system couldgreatly reduce the cost of round-trip travelbetween LEO and the surface of the Moon byminimizing the need for propellant expenditure.
Using similar analytical techniques, we haveshown that two rapidly spinning tethers inhighly elliptical orbits about Earth and Mars canbe combined to form a similar system thatprovides rapid interplanetary transport from asuborbital trajectory above the Earth'satmosphere to a suborbital trajectory above theMartian atmosphere and back.
Acknowledgments This research was supported by a Contract
07600-011 from NASA’s Institute for AdvancedConcepts, Dr. Robert A Cassanova, Director; andin part by the Tethers Unlimited, Inc. IR&Dprogram.
References
1. M. L. Cosmo and E. C. Lorenzini, Tethers InSpace Handbook - Third Edition, preparedfor NASA/MSFC by SmithsonianAstrophysical Observatory, Cambridge, MA,Dec 1997.
2. Paul A. Penzo, "Tethers for Mars SpaceOperations," The Case For Mars II , Ed. C.P.McKay, AAS Vol. 62, Science and TechnologySeries, pp. 445-465, July 1984.
3. Paul A. Penzo, "Prospective Lunar, Planetary,and Deep Space Applications of Tethers,"Paper AAS 86-367, AAS 33rd AnnualMeeting, Boulder, CO, Oct 1986.

Rapid Interplanetary Tether Transport Systems IAF-99-A.5.10
31
4. Carroll, J. "Preliminary Design for a 1 km/sTether Transport Facility," NASA OASTThird Annual Advanced PropulsionWorkshop , JPL, Pasadena, CA, 30-31 Jan 1992.
5. Forward, R. L., “Tether Transport from LEOto the Lunar Surface,” AIAA paper 91-2322,July 1991.
6. Hoyt, R. P., Forward, R. L., “Tether Systemfor Exchanging Payloads Between Low EarthOrbit and the Lunar Surface”, AIAA 97-2794,July 1997.
7. Danby, J. M. A., Fundamentals of CelestialMechanics, 2nd Edition, Willmann-Bell, 1992,Ch. 14.
8. Moravec, H., “A Non-Synchronous OrbitalSkyhook,” Journal of the AstronauticalSciences., 25(4), Oct-Dec1977, pp. 307-322.
9. Battin, R. H., An Introduction to t h eMathematics and Methods of Astrodynamics,AIAA, 1987, p. 504.
10. Failure Resistant Multiline Tether, Robert L.Forward and Robert P. Hoyt,PCT/US97/05840, filed 22 April 1997.
11. Martínez-Sánchez, M., Gavit, S. A., “OrbitalModifications using Forced Tether LengthVariations”, Journal of Guidance, Control,and Dynamics, 10(3) May-June 1987, pp 233-241.
12. Hoyt, R. P., “Maintenance Of Rotating TetherOrbits Using Tether Reeling”, Appendix F inCislunar Tether Transport System, TethersUnlimited, Inc. Final Report on NASAInstitute for Advanced Concepts ContractNIAC-07600-011.
13. Landis, G. A., “Reactionless OrbitalPropulsion using Tether Deployment,” ActaAstronautica 26(5), IAF Paper 90-254, 1992.
14. Kim, E., Vadali, S. R. “Modeling Issuesrelated to Retrieval of Flexible TetheredSatellite Systems,” Journal of Guidance,Control, and Dynamics, 18(5), 1995, pp 1169-76.
15. Uphoff, C., “Mission Analysis Evaluationand Space Trajectory Optimization Program”,Final Report on NASA Contract NAS5-11900,March 1973.
16. Bate, R. R., D. D. Mueller and J. E. White,Fundamentals of Astrodynamics, Dover, 1971
17. R. L. Forward and R. P. Hoyt, "FailsafeMultiline Hoytether Lifetimes," AIAApaper 95-28903 1st AIAA/SAE/ASME/ASEEJoint Propulsion Conference, San Diego, CA,July 1995.
18. R. P. Hoyt and R. L. Forward, LEO-LunarTether Transport System Study, TethersUnlimited Final Report on Subcontract S06-34444 on NASA Grant P3776-5-96 to theSmithsonian Astrophysical Observatory,April 1997.