Embed Size (px)
Citation preview

Who are Shadow?
1987 – Richard Greenhill and friends decide to start building robots
1997 – Shadow Robot Company set up
1998 – Smart Award
1999 – Millenium Product Status
2001 – NESTA Invention & Innovation Award
2004 – CLAWAR FP5/FP6 Thematic Network
2005-2010 – Sales to Universities, research companies, NASA
2008 – FP7 IP HANDLE
2009 – FP7 STREP TACO, ESA ITI, CTCENTER

20 years ago, Richard Greenhill decided to start building the General Purpose Robot that the future had been promising for as long as any of us could remember.
This is the result.
1987-1995: The Shadow Biped14 movementsAir Muscle actuationStood up using Fuzzy Logic, and the Alexander Technique
14 position sensors, 28 force sensors, 28 pressure sensors, 3 accelerometers, 10 load cells.
The Shadow Biped
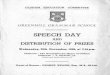
� Compact� Flexible� Lightweight� High Power� Soft and Safe� Just Plain Weird
Air Muscle

Ultimate challenge in robotics24 movementsMost complex bit of the human bodySensitivityPrecisionSoftness
Dextrous Hand
Technologies needed
Denser power sourcesSmall robust accurate position sensorsHigher power-to-weight ratio actuation3-6 Axis Force/torque sensingAccelerometers and InclinometersEmbeddable 3d vision systemsHigh resolution, high precision tactile sensingSoftware. Lots and lots of software!Very small buffered strain gaugesMotor/Valve drive unitsAmplified pressure sensors
Robot Components always need to be:� Smaller� Lighter� More versatile� More robust� More precise� Lower cost
General purpose robots – higher volumes,specialised components, more redesign for manufacture,long design times
Special purpose robots – low volumes, high margins, standard parts (needed yesterday!) no redesign for manufacture, short design times

Not Just Robot Hands

4 D's of Robotics
DifficultDirtyDangerousDistant
Anywhere you want humancapabilities, but don't wantto put a human.
Where are we going?
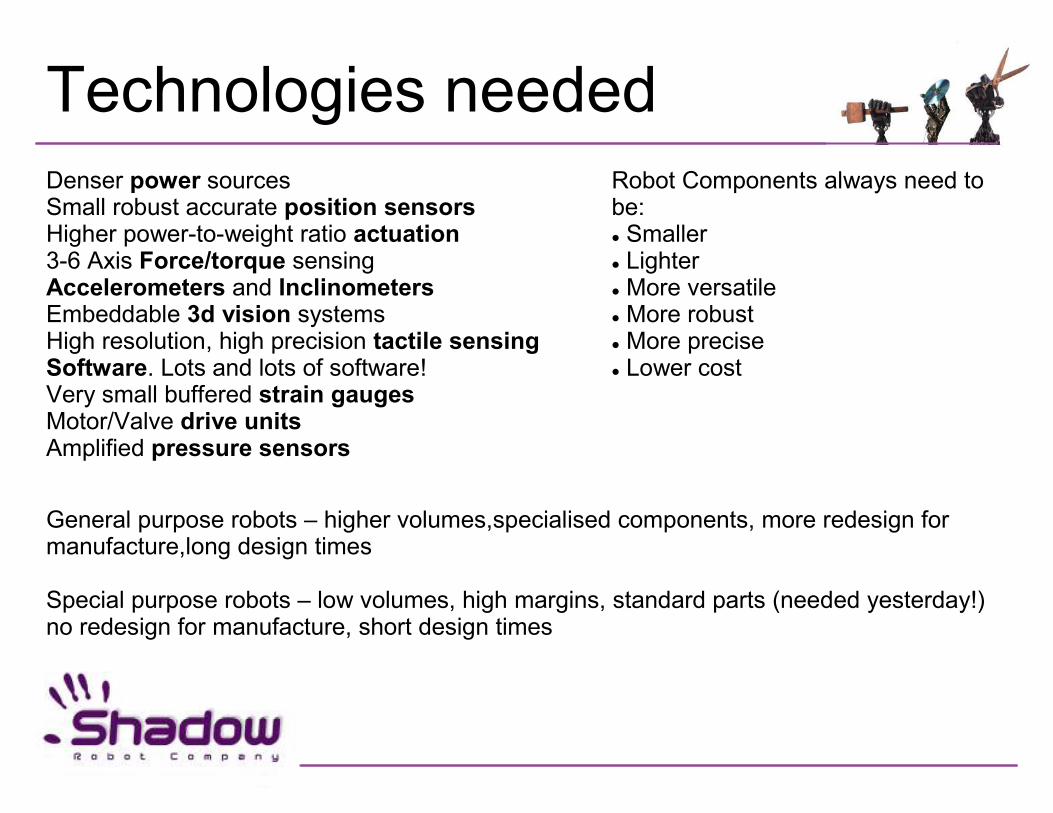
Hand ApplicationsRemote Manipulation
“Anywhere you need
human dexterity..
..but can’t put
a human being”
Defence bomb disposal, de-mining, driver-less vehicles, labour economy,
human process automation, remote maintenance in hazardous environments
Nuclear “glove box” and “hazardous handling” of nuclear, biological, chemical (NBC) materials
Space robust, low friction, wide temperature operating range (+-250 degrees), radiation resistant
Medical remote diagnosis and surgical intervention
Industrial warehouse remote manipulation, human process automation
Communications remote signalling, human process automation
Sub-aqua submarine de-mining and repair, oil and gas, industrial
Approaching ESA
�Invited to present at networking event
�ESA people interested...
�… but how to get a contract?
�Budget fun
�More Budget fun
�Eventual route – ITI bid, rejection, rewrite, resubmit
�Don't give up – it's important we don't let the Germans get all the
budget!

What did we do?
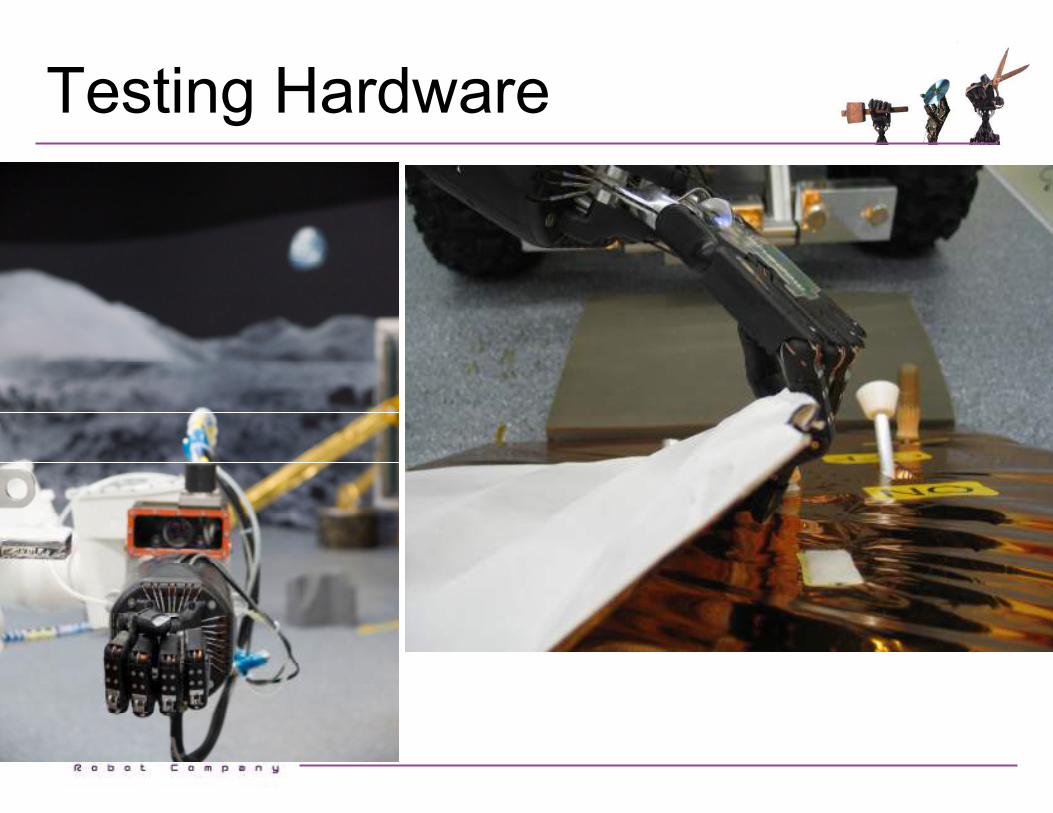
Testing Hardware

What next?
Reading EMITS regularly
Final delivery of hardware for testing and integration
Follow-on projects
Contract bids with Prime
Mars Sample Return curation
Contamination-free assembly
(and we're always open to good ideas!)