Embed Size (px)
Citation preview
Review ArticleA Survey of Modelling and Identification of Quadrotor Robot
Xiaodong Zhang1 Xiaoli Li2 Kang Wang2 and Yanjun Lu1
1 School of Automation Shenyang Aerospace University Shenyang 110136 China2 School of Automation and Electrical Engineering University of Science and Technology Beijing Beijing 100083 China
Correspondence should be addressed to Xiaoli Li lixiaolihotmailcom
Received 29 April 2014 Accepted 7 September 2014 Published 20 October 2014
Academic Editor Shen Yin
Copyright copy 2014 Xiaodong Zhang et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A quadrotor is a rotorcraft capable of hover forward flight and VTOL and is emerging as a fundamental research and applicationplatform at present with flexibility adaptability and ease of construction Since a quadrotor is basically considered an unstablesystemwith the characteristics of dynamics such as being intensively nonlinear multivariable strongly coupled and underactuateda precise and practical model is critical to control the vehicle which seems to be simple to operate As a rotorcraft the dynamics ofa quadrotor is mainly dominated by the complicated aerodynamic effects of the rotors This paper gives a tutorial of the platformconfiguration methodology of modeling comprehensive nonlinear model the aerodynamic effects and model identification fora quadrotor
1 Introduction
A quadrotor is agile to attain the full range of motionpropelled by four rotors symmetrically across its center withsmaller dimension and simple fabrication unlike a conven-tional helicopter with complicated mechanism Generally itshould be classified as a rotary-wing aircraft according toits capability of hover horizontal flight and vertical take-offand landing (VTOL) [1] In 1920s the prototypes of mannedquadrotors were introduced for the first time [1 2] howeverthe development of this new type of air vehicle is interruptedfor several decades due to various reasons such asmechanicalcomplexity large size and weight and difficulties in controlespecially Only in recent years a great deal of interests andefforts have been attracted on it a quadrotor has even becomea more optional vehicle for practical application such assearch-and-rescue and emergency response amazingly As asmall unmanned aerial vehicle (UAV) it has versatile formsfrom 03 to 4 kg Up to now some large quadrotors alreadyhave sufficient payload and flight endurance to undertake anumber of indoor and outdoor applications like Bell BoeingQuad TiltRotor and so forth [3] With the improvements ofhigh energy lithium battery MEMS sensor and other tech-nologies especially the scope for commercial opportunities is
rapidly increasing [4] As a quadrotor is inexpensive and easyto be designed and assembled as well as the complex dynam-ics such a rotorcraft is emerging as a fundamental researchplatform for aerial robotics research for the problems relatedto three-dimensional mobility and perception [5] Fur-thermore a quadrotorrsquos design and implementation haveeven become aMultidisciplinary EngineeringUndergraduateCourse nowadays for the aim to teach students to cope withthe challenges for instance fast and unstable dynamics andtight integration of control electronics and sensors [6]
For the specific purposes including academic researchcommercial usage and even military aim many researchgroups or institutions have fabricated various quadrotorssuch as theX4-flyer [7]OS4 [8] STARMAC[9] andPixhawk[10] which have become the shining stars mentioned on thenetwork magazines and all kinds of academic journals Itis worthy to note that the Draganflyer X4 Asctec Hum-mingbird Gaui Quad flyer and DJI Wookong have beenintroduced and developed in the comprehensive commercialmarket For the powerful operation some new types ofquadrotors with tilting propellers or a new configurationhave been constructed in [10ndash15] in order to address theissues such as underactuated system In addition a numberof OSPs (open- source projects) for quadrotors have emerged
Hindawi Publishing CorporationAbstract and Applied AnalysisVolume 2014 Article ID 320526 16 pageshttpdxdoiorg1011552014320526
2 Abstract and Applied Analysis
X-axis
Y-axis
(a) Plus
X-axis
Y-axis
(b) 119883
Figure 1 Plus and119883 quadrotor configurations
with contributions from RC hobbyists universities andcorporations [16]
A quadrotor helicopter is a highly nonlinear multi-variable strongly coupled underactuated and basically anunstable system (6 DOF with only 4 actuators) which acts aspreliminary foundation for design of control strategy Manycontrollers have been presented to overcome the complexityof the control resulting from the variable nature of theaerodynamic forces in different conditions of flight [17]Many works have been published on control issues aboutquadrotors such as PID controllers [18ndash21] linear quadraticLQR algorithm [22 23] 119867
infinloop forming method [24]
sliding mode variable structure control feedback lineariza-tion [25 26] backstepping [27 28] and even intelligentcontrol [29 30] In those works above the linearization ofthe nonlinear model around hover fight regime is conductedand used to construct controller to stabilize the quadrotorrsquosattitude under small roll and pitch angles The treatments tothe vehicle dynamics based on some simplistic assumptionshave often ignored known aerodynamic effects of rotorcraftvehicles In the case of hovering and forward flight with slowvelocity those assumptions are approximately reasonable
As the quadrotor research shifts to new research areas(ie mobile manipulation aerobatic moves etc) [31 32] theneed for an elaborate mathematical model arises and thesimplistic assumption is no more suitable When aggressivemaneuvers such as fast forward and heave flight actionsVTOL and the ground effect appear the dynamics ofquadrotors could be influenced significantly under theseaerodynamic force and moment It is shown in [33] thatexisting techniques of modeling and control are inadequatefor accurate trajectory tracking at higher speed and inuncertain environments if aerodynamic influence is ignoredThemodel incorporated with a full spectrum of aerodynamiceffects that impact on the quadrotor in faster climb heaveand forward flight has become an area of active research
with considerable effort focusing on strategies for generatingsequences of controllers to stabilize the robot to a desiredstate
Traditionally first principle assumptions and measure-ments of vehicle parameters can be used to derive nonlinearmodels from which linear models can be obtained As analternative system identification is also powerful to derivedynamic models directly from flight test data to overcomethe challenges such as hardly obtained parameters of theunderlying physics of the vehicle Even though there existsa large volume of multirotor research there is very littleresearch into system ID of multirotors [34] The reason forthis absence is partially due to the unstable system dynamicsof the quadrotor which makes open-loop identificationnonpractical
This paper provides a tutorial introduction to configu-ration modeling aerodynamics effects analysis and modelidentification for quadrotor The paperrsquos basic structure isas follows above all the characteristics and configurationof quadrotor are introduced then two formulations for themodel of quadrotor are compared and a comprehensivenonlinear equation characterizing the dynamics of quadrotoris derived Thereupon aerodynamic effects that impact onthe quadrotor in aggressive maneuvers are revealed At lastseveral methods about identification are reviewed
2 Characteristics of Quadrotor
Typically the structure of a quadrotor is simple enoughwhich comprises four rotors attached at the ends of armsunder a symmetric frame The dominating forces andmoments acting on the quadrotor are given by rotors drivenwith motors especially BLDC motors According to theorientation of the blades relative to the body coordinatesystem there are two basic types of quadrotor configurationsplus and cross-configurations shown in Figure 1
Abstract and Applied Analysis 3
In the plus configuration selected by most of the quadro-tors a pair of blades spinning in the same clockwise orcounter-clockwise direction are fabricated on 119909 and 119910 coor-dinates of the body frame coordinate system such as theassemble of theDraganflyer XProOn the contrary a differentcross-configuration is adopted by some other quadrotorssuch as the Convertawings model A the Piasecki PA-39 orthe Curtiss-Wright VZ-7AP in which there is no rotor at thefront or the rear but instead two rotors are on the right sideand two on the left
In contrast with the plus configuration for the samedesired motion the cross-style provides higher momentumwhich can increase the maneuverability performance as eachmove requires all four blades to vary their rotation speed [35]However the attitude control is basically analogous [36]
It is the configuration of a quadrotor that shows theinherent characteristics Basic control sequences of cross-configuration are shown in Figure 2 The quadrotorrsquos trans-lational motion depends on the tilting of rotorcraft platformtowards the desired orientation Hence it should be notedthat the translational and rotational motion are tightly cou-pled because the change of rotating speed of one rotor causesa motion in three degrees of freedom This is the reason thatallows the quadrotor with six degrees of freedom (DOF) tobe controlled by four inputs therefore the quadrotor is anunderactuated system
In principle a quadrotor is dynamically unstable andtherefore proper control is necessary tomake it stableDespiteof unstable dynamics it is good for agility The instabilitycomes from the changing rotorcraft parameters and theenvironmental disturbances such as wind [37] In additionthe lack of damping and the cross-coupling between degreesof freedom make it very sensitive to disturbances
3 6-DOF Airframe Dynamics
Dominating methods as Euler-Lagrange formalism andNewton-Euler formalism are applied to model the dynamicsfor an aircraft [38ndash44] It has been noted that the Newton-Euler method is easy to be understood and accepted phys-ically despite of the compact formulation and generaliza-tion shown by Euler-Lagrange formalism Nevertheless twomethods are consistent for the description of dynamics Thatis to say it is indicated that after a speed transform matrixthe Lagrange equation is an expression form of the secondNewton Law [45]
31 Euler-Lagrange Formalism The generalized coordinatesof the rotorcraft are given in [46]
q = (119909 119910 119911 120595 120579 120601) isin 1198776 (1)
where (119909 119910 119911) = 120585 isin 1198773 denotes the position of the mass
center of the quadrotor relative to the inertial frame and(120595 120579 120601) = 120578 isin 119877
3 are the three Euler angles (resp yawpitch and roll) under the conditions (minus120587 ⩽ 120595 ⩽ 120587) foryaw (minus1205872 ⩽ 120579 ⩽ 1205872) for pitch and (minus1205872 ⩽ 120601 ⩽ 1205872)
for roll which represent the orientation of the rotorcraft (seeFigure 3)
Naturally translational and rotational coordinates areobtained from the model
120585 = (119909 119910 119911) isin 1198773 120578 = (120595 120579 120601) isin 119877
3 (2)
The translational and the rotational kinetic energy of therotorcraft are
119879trans ≜119898
2119879
119879rot ≜1
2119879119869 (3)
where119898 denotes the mass of the quadrotor 119869 = W119879119868W is the
moment of inertia matrix in the inertial coordinate systemafter being transformed from the body frame by matrixW
W = [
[
minus sin (120579) 0 1
cos (120579) sin (120595) cos (120595) 0
cos (120579) cos (120595) minus sin (120595) 0
]
]
(4)
The only potential energy to be considered is the gravita-tional potential given by 119880 = 119898119892z
119864
The Lagrangian of the rotorcraft is
119871 (q q) = 119879trans + 119879rot minus 119880
119879
+1
2119879119869 minus 119898119892z
119864=
119898
2
(5)
The full rotorcraft dynamics model is derived from theEuler-Lagrange equations under external generalized forces
dd119905
120597119871
120597 119902minus
120597119871
120597119902= (119865
120585 120591) (6)
where 119865120585
= 119877119865 is the translational force applied to thequadrotor due to the throttle control input 120591 isin 119877
3 representsthe pitch roll and yawmoments and119877 denotes the rotationalmatrix 119877(120595 120579 120601) isin SO(3) which represents the orientationof the rotorcraft relative to a fixed inertial frame
Since the Lagrangian contains no cross-terms in thekinetic energy combining and the Euler-Lagrange equa-tion partitions into two parts One obtains
119898 120585 + (
0
0
119898119892
) = 119865120585 (7)
119869 120578 + 119869 120578 minus1
2
120597
120597120578( 120578
119879119869 120578) = 120591 (8)
Rewrite (8) as
119869 120578 + 119862 (120578 120578) 120578 = 120591 (9)
where119862(120578 120578) is referred to as the Coriolis terms and containsthe gyroscopic and centrifugal terms
32 Newton-Euler Formalism Typically it is necessary todefine two frames of reference each with its defined right-handed coordinate system as shown in Figure 3 119883 119884 and119885 are orthogonal axes of the body-fixed frame with its
4 Abstract and Applied Analysis
(a) (b) (c)
(d) (e) (f)
Figure 2 Quadrotor dynamics (a) and (b) difference in torque to manipulate the yaw angle (Ψ) (c) and (d) hovering motion and verticalpropulsion due to balanced torques (e) and (f) difference in thrust to manipulate the pitch angle (120579) and the roll angle (120601)
Fl120591l
1205964Fb120591b
1205963r
Ff120591f
1205961
p
Fr120591r
1205962
q
ONED
120601
120579120595
XB u
ZB w
OB
YB ZE
YE
XE
Figure 3 Quadrotorrsquos body-fixed and inertial coordinate systems
correspondent body linear velocity vector = [119906 V 120596]119879
and angular rate vector Ω = [119901 119902 119903]119879 Another one is an
Earth-fixed inertial (also known as navigation) coordinatesystem 119864 = (119883
119864 119884
119864 119885
119864) with which initially the body-
fixed coincides The attitude of the quadrotor expressed interms of the Euler angles 120601 (roll) 120579 (pitch) and 120595 (yaw)is evaluated via sequent rotations around each one of theinertial axes Herein a reference frame by119874NED (North-East-Down) denotes an inertial reference frame and 119874
119861a body-
fixed reference frameGenerally a quadrotor is considered as a rigid body
in a three-dimensional space The motion equations of aquadrotor subject to external force 119865 isin 119877
3 and torque 120591 isin
1198773 are given by the following Newton-Euler equations with
respect to the body coordinate frame 119861 = (119883119861 119884
119861 119885
119861)
[119898119868
3times30
0 119868] [
] + [
120596 times 119898119881
120596 times 119868120596] = [
119865
120591] (10)
The rotorcraft orientation in space is presented by arotation 119877 from 119861 to 119864 where 119877 isin SO3 is the rotationmatrixHere 119888
120579is for cos(120579) and 119904
120579is for sin(120579)
119877 = (
119888120595119888120579
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119904120579119904120595
119904120601119904120579119904120595+ 119888
120579119888120595
119888120601119904120579119904120595
minus119904120579
119904120601119888120579
119888120601119888120579
) (11)
With the transformation 119877 the first equation assessingthe translational dynamics in (11) can be written in 119864
119898 120585 = 119877119865 minus 119898119892119885119864 (12)
Recall the kinematic relationship between the generalizedvelocities 120578 = ( 120601 120579 ) and the angular velocity Ω = 119882 120578119882 isin 119877
3times3Defining a pseudoinertiamatrix 119868(120578) = 119869119882 and aCoriolis
vector 119862( 120578 120578) = 119868 120578 + 119882 120578 times 119868 120578 one can obtain
119898 120585 = 119877119865 minus 119898119892119885119864
119868 (120578) 120578 + 119862 ( 120578 120578) = 120591
(13)
Abstract and Applied Analysis 5
This model has the same structure as the one obtained bythe Euler-Lagrange approach in which the main difference isthe expressions of 119868 and119862 which aremore complex andmoredifficult to implement and to compute in the case of the Euler-Lagrange method It is important to note that the model (13)is common for all aerial robots with six degrees of freedom
4 Basic Dynamic Model of a Quadrotor
This section introduces the basic quadrotor dynamic mod-eling with rigid body dynamics and kinematics This modelbased on the first order approximation has been successfullyutilized in various quadrotor control designs so far
In the first place some assumptions are reasonable andessential shown as follows [44]
(i) The structure is supposedly rigid(ii) The structure is supposedly symmetrical(iii) The CoG (center of gravity) and the body fixed frame
origin are assumed to coincide
41 Dynamic Model of a Quadrotor As we know Newtonsecond law is applied to the translational motion in inertialframes [47] From the equation of Coriolis one can obtain
119898dkd119905
119894
= 119898(dkd119905
119887
+ 120596119887119894
times k) = f (14)
where119898 is themass of the quadrotor f119887 ≜ (119891119909
119891119910
119891119911)119879 is the
total force applied to the quadrotor and k is the translationalvelocity 120596
119887119894is the angular velocity of the airframe with
respect to the inertial frame Since the control force iscomputed and applied in the body coordinate system andsince 120596 is measured in body coordinates (14) is expressed inbody coordinates where k119887 ≜ (119906 V 120596)119879 and w119887
119887119894≜ (119901 119902 119903)
119879For rotational motion Newtonrsquos second law state is
dhd119905
119894
=dhd119905
119887
+ 120596119887119894
times h = m (15)
where h is the angular momentum and m is the appliedtorque h119887 = Jw119887
119887119894 J is the constant inertia matrix The
quadrotor is essentially symmetric about all three axes whichimplies that J = diag(119869
119909 119869119910 119869119911)
Givenm119887≜ (120591
120601 120591
120579 120591
Ψ)119879 which denote the rolling torque
the pitching torque and the total yawing torque are inducedby the rotor thrust and rotor drag acting on the airframe
The six-freedom-degree model for the quadrotor kine-matics and dynamics can be summarized as follows
(
119910
) = (
119888120579119888120595
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119888120579119904120595
119904120601119904120579119904120595+ 119888
120601119888120595
119888120601119904120579119904120595minus 119904
120579119888120595
119904120579
minus119904120601119888120579
minus119888120601119888120579
)(
119906
V120596
)
(
V
) = (
119903V minus 119902120596
119901120596 minus 119903119906
119902119906 minus 119901V) +
1
119898(
119891119909
119891119910
119891119911
)
(
120601
120579
) = (
1 119904120601119905120579
119888120601119905120579
0 119888120601
minus119904120601
0 119904120601119888120579
119888120601119888120579
)(
119901
119902
119903
)
(
119902
119903
) =
(((
(
119869119910minus 119869
119911
119869119909
119902119903
119869119911minus 119869
119909
119869119910
119901119903
119869119909minus 119869
119910
119869119911
119901119902
)))
)
+((
(
1
119869119909
120591120601
1
119869119910
120591120579
1
119869119911
120591120595
))
)
(16)
Equation (16) is a full nonlinear model for a quadrotorin which the complex dynamics is shown obviously such asstrong nonlinearity like the multiplication between systemstates intensive coupling among the variables and the mul-tivariable features intuitively that imposes the difficulties onthe controller design and on the other hand attracts greatinterest of research
42 Forces and Moments The forces and torques that acton the quadrotor are primarily due to gravity and thefour propellers shown in Figure 3 The steady-state thrust119865119894generated by a hovering rotor (ie a rotor that is not
translating horizontally or vertically) in free air coincideswithminus119885
119861axisThe total force acting on the quadrotor is given
by
119865 = 119865119891+ 119865
119903+ 119865
119887+ 119865
119897 (17)
The rolling torque the pitching torque and the totalyawing torque are given by
120591120601= 119897 (119865
119897minus 119865
119903) 120591
120579= 119897 (119865
119891minus 119865
119887)
120591120595= 120591
119903+ 120591
119897+ 120591
119891+ 120591
119887
(18)
The gravity force acting on the center of mass is given by
119891119887
119892= 119877
119879(
0
0
119898119892
) = (
minus119898119892119904120579
119898119892119888120579119904120601
119898119892119888120579119888120601
) (19)
Equation (16) shows strong coupled dynamics [48] thespeed change of one rotor gives rise to motion in at least 3degrees of freedom For instance the speed decrease of theright rotor will roll the craft to the right under the imbalancebetween left and right lift forces coupled with the rotorcraftrsquosyaw to the right due to the imbalance in torque betweenclockwise and counter-clockwise so the translation changesdirection toward the front
Nevertheless in some cases that the rotating movementis slight the Coriolis terms 119902119903 119901119903 and 119901119902 are small and can
6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Abstract and Applied Analysis
X-axis
Y-axis
(a) Plus
X-axis
Y-axis
(b) 119883
Figure 1 Plus and119883 quadrotor configurations
with contributions from RC hobbyists universities andcorporations [16]
A quadrotor helicopter is a highly nonlinear multi-variable strongly coupled underactuated and basically anunstable system (6 DOF with only 4 actuators) which acts aspreliminary foundation for design of control strategy Manycontrollers have been presented to overcome the complexityof the control resulting from the variable nature of theaerodynamic forces in different conditions of flight [17]Many works have been published on control issues aboutquadrotors such as PID controllers [18ndash21] linear quadraticLQR algorithm [22 23] 119867
infinloop forming method [24]
sliding mode variable structure control feedback lineariza-tion [25 26] backstepping [27 28] and even intelligentcontrol [29 30] In those works above the linearization ofthe nonlinear model around hover fight regime is conductedand used to construct controller to stabilize the quadrotorrsquosattitude under small roll and pitch angles The treatments tothe vehicle dynamics based on some simplistic assumptionshave often ignored known aerodynamic effects of rotorcraftvehicles In the case of hovering and forward flight with slowvelocity those assumptions are approximately reasonable
As the quadrotor research shifts to new research areas(ie mobile manipulation aerobatic moves etc) [31 32] theneed for an elaborate mathematical model arises and thesimplistic assumption is no more suitable When aggressivemaneuvers such as fast forward and heave flight actionsVTOL and the ground effect appear the dynamics ofquadrotors could be influenced significantly under theseaerodynamic force and moment It is shown in [33] thatexisting techniques of modeling and control are inadequatefor accurate trajectory tracking at higher speed and inuncertain environments if aerodynamic influence is ignoredThemodel incorporated with a full spectrum of aerodynamiceffects that impact on the quadrotor in faster climb heaveand forward flight has become an area of active research
with considerable effort focusing on strategies for generatingsequences of controllers to stabilize the robot to a desiredstate
Traditionally first principle assumptions and measure-ments of vehicle parameters can be used to derive nonlinearmodels from which linear models can be obtained As analternative system identification is also powerful to derivedynamic models directly from flight test data to overcomethe challenges such as hardly obtained parameters of theunderlying physics of the vehicle Even though there existsa large volume of multirotor research there is very littleresearch into system ID of multirotors [34] The reason forthis absence is partially due to the unstable system dynamicsof the quadrotor which makes open-loop identificationnonpractical
This paper provides a tutorial introduction to configu-ration modeling aerodynamics effects analysis and modelidentification for quadrotor The paperrsquos basic structure isas follows above all the characteristics and configurationof quadrotor are introduced then two formulations for themodel of quadrotor are compared and a comprehensivenonlinear equation characterizing the dynamics of quadrotoris derived Thereupon aerodynamic effects that impact onthe quadrotor in aggressive maneuvers are revealed At lastseveral methods about identification are reviewed
2 Characteristics of Quadrotor
Typically the structure of a quadrotor is simple enoughwhich comprises four rotors attached at the ends of armsunder a symmetric frame The dominating forces andmoments acting on the quadrotor are given by rotors drivenwith motors especially BLDC motors According to theorientation of the blades relative to the body coordinatesystem there are two basic types of quadrotor configurationsplus and cross-configurations shown in Figure 1
Abstract and Applied Analysis 3
In the plus configuration selected by most of the quadro-tors a pair of blades spinning in the same clockwise orcounter-clockwise direction are fabricated on 119909 and 119910 coor-dinates of the body frame coordinate system such as theassemble of theDraganflyer XProOn the contrary a differentcross-configuration is adopted by some other quadrotorssuch as the Convertawings model A the Piasecki PA-39 orthe Curtiss-Wright VZ-7AP in which there is no rotor at thefront or the rear but instead two rotors are on the right sideand two on the left
In contrast with the plus configuration for the samedesired motion the cross-style provides higher momentumwhich can increase the maneuverability performance as eachmove requires all four blades to vary their rotation speed [35]However the attitude control is basically analogous [36]
It is the configuration of a quadrotor that shows theinherent characteristics Basic control sequences of cross-configuration are shown in Figure 2 The quadrotorrsquos trans-lational motion depends on the tilting of rotorcraft platformtowards the desired orientation Hence it should be notedthat the translational and rotational motion are tightly cou-pled because the change of rotating speed of one rotor causesa motion in three degrees of freedom This is the reason thatallows the quadrotor with six degrees of freedom (DOF) tobe controlled by four inputs therefore the quadrotor is anunderactuated system
In principle a quadrotor is dynamically unstable andtherefore proper control is necessary tomake it stableDespiteof unstable dynamics it is good for agility The instabilitycomes from the changing rotorcraft parameters and theenvironmental disturbances such as wind [37] In additionthe lack of damping and the cross-coupling between degreesof freedom make it very sensitive to disturbances
3 6-DOF Airframe Dynamics
Dominating methods as Euler-Lagrange formalism andNewton-Euler formalism are applied to model the dynamicsfor an aircraft [38ndash44] It has been noted that the Newton-Euler method is easy to be understood and accepted phys-ically despite of the compact formulation and generaliza-tion shown by Euler-Lagrange formalism Nevertheless twomethods are consistent for the description of dynamics Thatis to say it is indicated that after a speed transform matrixthe Lagrange equation is an expression form of the secondNewton Law [45]
31 Euler-Lagrange Formalism The generalized coordinatesof the rotorcraft are given in [46]
q = (119909 119910 119911 120595 120579 120601) isin 1198776 (1)
where (119909 119910 119911) = 120585 isin 1198773 denotes the position of the mass
center of the quadrotor relative to the inertial frame and(120595 120579 120601) = 120578 isin 119877
3 are the three Euler angles (resp yawpitch and roll) under the conditions (minus120587 ⩽ 120595 ⩽ 120587) foryaw (minus1205872 ⩽ 120579 ⩽ 1205872) for pitch and (minus1205872 ⩽ 120601 ⩽ 1205872)
for roll which represent the orientation of the rotorcraft (seeFigure 3)
Naturally translational and rotational coordinates areobtained from the model
120585 = (119909 119910 119911) isin 1198773 120578 = (120595 120579 120601) isin 119877
3 (2)
The translational and the rotational kinetic energy of therotorcraft are
119879trans ≜119898
2119879
119879rot ≜1
2119879119869 (3)
where119898 denotes the mass of the quadrotor 119869 = W119879119868W is the
moment of inertia matrix in the inertial coordinate systemafter being transformed from the body frame by matrixW
W = [
[
minus sin (120579) 0 1
cos (120579) sin (120595) cos (120595) 0
cos (120579) cos (120595) minus sin (120595) 0
]
]
(4)
The only potential energy to be considered is the gravita-tional potential given by 119880 = 119898119892z
119864
The Lagrangian of the rotorcraft is
119871 (q q) = 119879trans + 119879rot minus 119880
119879
+1
2119879119869 minus 119898119892z
119864=
119898
2
(5)
The full rotorcraft dynamics model is derived from theEuler-Lagrange equations under external generalized forces
dd119905
120597119871
120597 119902minus
120597119871
120597119902= (119865
120585 120591) (6)
where 119865120585
= 119877119865 is the translational force applied to thequadrotor due to the throttle control input 120591 isin 119877
3 representsthe pitch roll and yawmoments and119877 denotes the rotationalmatrix 119877(120595 120579 120601) isin SO(3) which represents the orientationof the rotorcraft relative to a fixed inertial frame
Since the Lagrangian contains no cross-terms in thekinetic energy combining and the Euler-Lagrange equa-tion partitions into two parts One obtains
119898 120585 + (
0
0
119898119892
) = 119865120585 (7)
119869 120578 + 119869 120578 minus1
2
120597
120597120578( 120578
119879119869 120578) = 120591 (8)
Rewrite (8) as
119869 120578 + 119862 (120578 120578) 120578 = 120591 (9)
where119862(120578 120578) is referred to as the Coriolis terms and containsthe gyroscopic and centrifugal terms
32 Newton-Euler Formalism Typically it is necessary todefine two frames of reference each with its defined right-handed coordinate system as shown in Figure 3 119883 119884 and119885 are orthogonal axes of the body-fixed frame with its
4 Abstract and Applied Analysis
(a) (b) (c)
(d) (e) (f)
Figure 2 Quadrotor dynamics (a) and (b) difference in torque to manipulate the yaw angle (Ψ) (c) and (d) hovering motion and verticalpropulsion due to balanced torques (e) and (f) difference in thrust to manipulate the pitch angle (120579) and the roll angle (120601)
Fl120591l
1205964Fb120591b
1205963r
Ff120591f
1205961
p
Fr120591r
1205962
q
ONED
120601
120579120595
XB u
ZB w
OB
YB ZE
YE
XE
Figure 3 Quadrotorrsquos body-fixed and inertial coordinate systems
correspondent body linear velocity vector = [119906 V 120596]119879
and angular rate vector Ω = [119901 119902 119903]119879 Another one is an
Earth-fixed inertial (also known as navigation) coordinatesystem 119864 = (119883
119864 119884
119864 119885
119864) with which initially the body-
fixed coincides The attitude of the quadrotor expressed interms of the Euler angles 120601 (roll) 120579 (pitch) and 120595 (yaw)is evaluated via sequent rotations around each one of theinertial axes Herein a reference frame by119874NED (North-East-Down) denotes an inertial reference frame and 119874
119861a body-
fixed reference frameGenerally a quadrotor is considered as a rigid body
in a three-dimensional space The motion equations of aquadrotor subject to external force 119865 isin 119877
3 and torque 120591 isin
1198773 are given by the following Newton-Euler equations with
respect to the body coordinate frame 119861 = (119883119861 119884
119861 119885
119861)
[119898119868
3times30
0 119868] [
] + [
120596 times 119898119881
120596 times 119868120596] = [
119865
120591] (10)
The rotorcraft orientation in space is presented by arotation 119877 from 119861 to 119864 where 119877 isin SO3 is the rotationmatrixHere 119888
120579is for cos(120579) and 119904
120579is for sin(120579)
119877 = (
119888120595119888120579
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119904120579119904120595
119904120601119904120579119904120595+ 119888
120579119888120595
119888120601119904120579119904120595
minus119904120579
119904120601119888120579
119888120601119888120579
) (11)
With the transformation 119877 the first equation assessingthe translational dynamics in (11) can be written in 119864
119898 120585 = 119877119865 minus 119898119892119885119864 (12)
Recall the kinematic relationship between the generalizedvelocities 120578 = ( 120601 120579 ) and the angular velocity Ω = 119882 120578119882 isin 119877
3times3Defining a pseudoinertiamatrix 119868(120578) = 119869119882 and aCoriolis
vector 119862( 120578 120578) = 119868 120578 + 119882 120578 times 119868 120578 one can obtain
119898 120585 = 119877119865 minus 119898119892119885119864
119868 (120578) 120578 + 119862 ( 120578 120578) = 120591
(13)
Abstract and Applied Analysis 5
This model has the same structure as the one obtained bythe Euler-Lagrange approach in which the main difference isthe expressions of 119868 and119862 which aremore complex andmoredifficult to implement and to compute in the case of the Euler-Lagrange method It is important to note that the model (13)is common for all aerial robots with six degrees of freedom
4 Basic Dynamic Model of a Quadrotor
This section introduces the basic quadrotor dynamic mod-eling with rigid body dynamics and kinematics This modelbased on the first order approximation has been successfullyutilized in various quadrotor control designs so far
In the first place some assumptions are reasonable andessential shown as follows [44]
(i) The structure is supposedly rigid(ii) The structure is supposedly symmetrical(iii) The CoG (center of gravity) and the body fixed frame
origin are assumed to coincide
41 Dynamic Model of a Quadrotor As we know Newtonsecond law is applied to the translational motion in inertialframes [47] From the equation of Coriolis one can obtain
119898dkd119905
119894
= 119898(dkd119905
119887
+ 120596119887119894
times k) = f (14)
where119898 is themass of the quadrotor f119887 ≜ (119891119909
119891119910
119891119911)119879 is the
total force applied to the quadrotor and k is the translationalvelocity 120596
119887119894is the angular velocity of the airframe with
respect to the inertial frame Since the control force iscomputed and applied in the body coordinate system andsince 120596 is measured in body coordinates (14) is expressed inbody coordinates where k119887 ≜ (119906 V 120596)119879 and w119887
119887119894≜ (119901 119902 119903)
119879For rotational motion Newtonrsquos second law state is
dhd119905
119894
=dhd119905
119887
+ 120596119887119894
times h = m (15)
where h is the angular momentum and m is the appliedtorque h119887 = Jw119887
119887119894 J is the constant inertia matrix The
quadrotor is essentially symmetric about all three axes whichimplies that J = diag(119869
119909 119869119910 119869119911)
Givenm119887≜ (120591
120601 120591
120579 120591
Ψ)119879 which denote the rolling torque
the pitching torque and the total yawing torque are inducedby the rotor thrust and rotor drag acting on the airframe
The six-freedom-degree model for the quadrotor kine-matics and dynamics can be summarized as follows
(
119910
) = (
119888120579119888120595
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119888120579119904120595
119904120601119904120579119904120595+ 119888
120601119888120595
119888120601119904120579119904120595minus 119904
120579119888120595
119904120579
minus119904120601119888120579
minus119888120601119888120579
)(
119906
V120596
)
(
V
) = (
119903V minus 119902120596
119901120596 minus 119903119906
119902119906 minus 119901V) +
1
119898(
119891119909
119891119910
119891119911
)
(
120601
120579
) = (
1 119904120601119905120579
119888120601119905120579
0 119888120601
minus119904120601
0 119904120601119888120579
119888120601119888120579
)(
119901
119902
119903
)
(
119902
119903
) =
(((
(
119869119910minus 119869
119911
119869119909
119902119903
119869119911minus 119869
119909
119869119910
119901119903
119869119909minus 119869
119910
119869119911
119901119902
)))
)
+((
(
1
119869119909
120591120601
1
119869119910
120591120579
1
119869119911
120591120595
))
)
(16)
Equation (16) is a full nonlinear model for a quadrotorin which the complex dynamics is shown obviously such asstrong nonlinearity like the multiplication between systemstates intensive coupling among the variables and the mul-tivariable features intuitively that imposes the difficulties onthe controller design and on the other hand attracts greatinterest of research
42 Forces and Moments The forces and torques that acton the quadrotor are primarily due to gravity and thefour propellers shown in Figure 3 The steady-state thrust119865119894generated by a hovering rotor (ie a rotor that is not
translating horizontally or vertically) in free air coincideswithminus119885
119861axisThe total force acting on the quadrotor is given
by
119865 = 119865119891+ 119865
119903+ 119865
119887+ 119865
119897 (17)
The rolling torque the pitching torque and the totalyawing torque are given by
120591120601= 119897 (119865
119897minus 119865
119903) 120591
120579= 119897 (119865
119891minus 119865
119887)
120591120595= 120591
119903+ 120591
119897+ 120591
119891+ 120591
119887
(18)
The gravity force acting on the center of mass is given by
119891119887
119892= 119877
119879(
0
0
119898119892
) = (
minus119898119892119904120579
119898119892119888120579119904120601
119898119892119888120579119888120601
) (19)
Equation (16) shows strong coupled dynamics [48] thespeed change of one rotor gives rise to motion in at least 3degrees of freedom For instance the speed decrease of theright rotor will roll the craft to the right under the imbalancebetween left and right lift forces coupled with the rotorcraftrsquosyaw to the right due to the imbalance in torque betweenclockwise and counter-clockwise so the translation changesdirection toward the front
Nevertheless in some cases that the rotating movementis slight the Coriolis terms 119902119903 119901119903 and 119901119902 are small and can
6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 3
In the plus configuration selected by most of the quadro-tors a pair of blades spinning in the same clockwise orcounter-clockwise direction are fabricated on 119909 and 119910 coor-dinates of the body frame coordinate system such as theassemble of theDraganflyer XProOn the contrary a differentcross-configuration is adopted by some other quadrotorssuch as the Convertawings model A the Piasecki PA-39 orthe Curtiss-Wright VZ-7AP in which there is no rotor at thefront or the rear but instead two rotors are on the right sideand two on the left
In contrast with the plus configuration for the samedesired motion the cross-style provides higher momentumwhich can increase the maneuverability performance as eachmove requires all four blades to vary their rotation speed [35]However the attitude control is basically analogous [36]
It is the configuration of a quadrotor that shows theinherent characteristics Basic control sequences of cross-configuration are shown in Figure 2 The quadrotorrsquos trans-lational motion depends on the tilting of rotorcraft platformtowards the desired orientation Hence it should be notedthat the translational and rotational motion are tightly cou-pled because the change of rotating speed of one rotor causesa motion in three degrees of freedom This is the reason thatallows the quadrotor with six degrees of freedom (DOF) tobe controlled by four inputs therefore the quadrotor is anunderactuated system
In principle a quadrotor is dynamically unstable andtherefore proper control is necessary tomake it stableDespiteof unstable dynamics it is good for agility The instabilitycomes from the changing rotorcraft parameters and theenvironmental disturbances such as wind [37] In additionthe lack of damping and the cross-coupling between degreesof freedom make it very sensitive to disturbances
3 6-DOF Airframe Dynamics
Dominating methods as Euler-Lagrange formalism andNewton-Euler formalism are applied to model the dynamicsfor an aircraft [38ndash44] It has been noted that the Newton-Euler method is easy to be understood and accepted phys-ically despite of the compact formulation and generaliza-tion shown by Euler-Lagrange formalism Nevertheless twomethods are consistent for the description of dynamics Thatis to say it is indicated that after a speed transform matrixthe Lagrange equation is an expression form of the secondNewton Law [45]
31 Euler-Lagrange Formalism The generalized coordinatesof the rotorcraft are given in [46]
q = (119909 119910 119911 120595 120579 120601) isin 1198776 (1)
where (119909 119910 119911) = 120585 isin 1198773 denotes the position of the mass
center of the quadrotor relative to the inertial frame and(120595 120579 120601) = 120578 isin 119877
3 are the three Euler angles (resp yawpitch and roll) under the conditions (minus120587 ⩽ 120595 ⩽ 120587) foryaw (minus1205872 ⩽ 120579 ⩽ 1205872) for pitch and (minus1205872 ⩽ 120601 ⩽ 1205872)
for roll which represent the orientation of the rotorcraft (seeFigure 3)
Naturally translational and rotational coordinates areobtained from the model
120585 = (119909 119910 119911) isin 1198773 120578 = (120595 120579 120601) isin 119877
3 (2)
The translational and the rotational kinetic energy of therotorcraft are
119879trans ≜119898
2119879
119879rot ≜1
2119879119869 (3)
where119898 denotes the mass of the quadrotor 119869 = W119879119868W is the
moment of inertia matrix in the inertial coordinate systemafter being transformed from the body frame by matrixW
W = [
[
minus sin (120579) 0 1
cos (120579) sin (120595) cos (120595) 0
cos (120579) cos (120595) minus sin (120595) 0
]
]
(4)
The only potential energy to be considered is the gravita-tional potential given by 119880 = 119898119892z
119864
The Lagrangian of the rotorcraft is
119871 (q q) = 119879trans + 119879rot minus 119880
119879
+1
2119879119869 minus 119898119892z
119864=
119898
2
(5)
The full rotorcraft dynamics model is derived from theEuler-Lagrange equations under external generalized forces
dd119905
120597119871
120597 119902minus
120597119871
120597119902= (119865
120585 120591) (6)
where 119865120585
= 119877119865 is the translational force applied to thequadrotor due to the throttle control input 120591 isin 119877
3 representsthe pitch roll and yawmoments and119877 denotes the rotationalmatrix 119877(120595 120579 120601) isin SO(3) which represents the orientationof the rotorcraft relative to a fixed inertial frame
Since the Lagrangian contains no cross-terms in thekinetic energy combining and the Euler-Lagrange equa-tion partitions into two parts One obtains
119898 120585 + (
0
0
119898119892
) = 119865120585 (7)
119869 120578 + 119869 120578 minus1
2
120597
120597120578( 120578
119879119869 120578) = 120591 (8)
Rewrite (8) as
119869 120578 + 119862 (120578 120578) 120578 = 120591 (9)
where119862(120578 120578) is referred to as the Coriolis terms and containsthe gyroscopic and centrifugal terms
32 Newton-Euler Formalism Typically it is necessary todefine two frames of reference each with its defined right-handed coordinate system as shown in Figure 3 119883 119884 and119885 are orthogonal axes of the body-fixed frame with its
4 Abstract and Applied Analysis
(a) (b) (c)
(d) (e) (f)
Figure 2 Quadrotor dynamics (a) and (b) difference in torque to manipulate the yaw angle (Ψ) (c) and (d) hovering motion and verticalpropulsion due to balanced torques (e) and (f) difference in thrust to manipulate the pitch angle (120579) and the roll angle (120601)
Fl120591l
1205964Fb120591b
1205963r
Ff120591f
1205961
p
Fr120591r
1205962
q
ONED
120601
120579120595
XB u
ZB w
OB
YB ZE
YE
XE
Figure 3 Quadrotorrsquos body-fixed and inertial coordinate systems
correspondent body linear velocity vector = [119906 V 120596]119879
and angular rate vector Ω = [119901 119902 119903]119879 Another one is an
Earth-fixed inertial (also known as navigation) coordinatesystem 119864 = (119883
119864 119884
119864 119885
119864) with which initially the body-
fixed coincides The attitude of the quadrotor expressed interms of the Euler angles 120601 (roll) 120579 (pitch) and 120595 (yaw)is evaluated via sequent rotations around each one of theinertial axes Herein a reference frame by119874NED (North-East-Down) denotes an inertial reference frame and 119874
119861a body-
fixed reference frameGenerally a quadrotor is considered as a rigid body
in a three-dimensional space The motion equations of aquadrotor subject to external force 119865 isin 119877
3 and torque 120591 isin
1198773 are given by the following Newton-Euler equations with
respect to the body coordinate frame 119861 = (119883119861 119884
119861 119885
119861)
[119898119868
3times30
0 119868] [
] + [
120596 times 119898119881
120596 times 119868120596] = [
119865
120591] (10)
The rotorcraft orientation in space is presented by arotation 119877 from 119861 to 119864 where 119877 isin SO3 is the rotationmatrixHere 119888
120579is for cos(120579) and 119904
120579is for sin(120579)
119877 = (
119888120595119888120579
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119904120579119904120595
119904120601119904120579119904120595+ 119888
120579119888120595
119888120601119904120579119904120595
minus119904120579
119904120601119888120579
119888120601119888120579
) (11)
With the transformation 119877 the first equation assessingthe translational dynamics in (11) can be written in 119864
119898 120585 = 119877119865 minus 119898119892119885119864 (12)
Recall the kinematic relationship between the generalizedvelocities 120578 = ( 120601 120579 ) and the angular velocity Ω = 119882 120578119882 isin 119877
3times3Defining a pseudoinertiamatrix 119868(120578) = 119869119882 and aCoriolis
vector 119862( 120578 120578) = 119868 120578 + 119882 120578 times 119868 120578 one can obtain
119898 120585 = 119877119865 minus 119898119892119885119864
119868 (120578) 120578 + 119862 ( 120578 120578) = 120591
(13)
Abstract and Applied Analysis 5
This model has the same structure as the one obtained bythe Euler-Lagrange approach in which the main difference isthe expressions of 119868 and119862 which aremore complex andmoredifficult to implement and to compute in the case of the Euler-Lagrange method It is important to note that the model (13)is common for all aerial robots with six degrees of freedom
4 Basic Dynamic Model of a Quadrotor
This section introduces the basic quadrotor dynamic mod-eling with rigid body dynamics and kinematics This modelbased on the first order approximation has been successfullyutilized in various quadrotor control designs so far
In the first place some assumptions are reasonable andessential shown as follows [44]
(i) The structure is supposedly rigid(ii) The structure is supposedly symmetrical(iii) The CoG (center of gravity) and the body fixed frame
origin are assumed to coincide
41 Dynamic Model of a Quadrotor As we know Newtonsecond law is applied to the translational motion in inertialframes [47] From the equation of Coriolis one can obtain
119898dkd119905
119894
= 119898(dkd119905
119887
+ 120596119887119894
times k) = f (14)
where119898 is themass of the quadrotor f119887 ≜ (119891119909
119891119910
119891119911)119879 is the
total force applied to the quadrotor and k is the translationalvelocity 120596
119887119894is the angular velocity of the airframe with
respect to the inertial frame Since the control force iscomputed and applied in the body coordinate system andsince 120596 is measured in body coordinates (14) is expressed inbody coordinates where k119887 ≜ (119906 V 120596)119879 and w119887
119887119894≜ (119901 119902 119903)
119879For rotational motion Newtonrsquos second law state is
dhd119905
119894
=dhd119905
119887
+ 120596119887119894
times h = m (15)
where h is the angular momentum and m is the appliedtorque h119887 = Jw119887
119887119894 J is the constant inertia matrix The
quadrotor is essentially symmetric about all three axes whichimplies that J = diag(119869
119909 119869119910 119869119911)
Givenm119887≜ (120591
120601 120591
120579 120591
Ψ)119879 which denote the rolling torque
the pitching torque and the total yawing torque are inducedby the rotor thrust and rotor drag acting on the airframe
The six-freedom-degree model for the quadrotor kine-matics and dynamics can be summarized as follows
(
119910
) = (
119888120579119888120595
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119888120579119904120595
119904120601119904120579119904120595+ 119888
120601119888120595
119888120601119904120579119904120595minus 119904
120579119888120595
119904120579
minus119904120601119888120579
minus119888120601119888120579
)(
119906
V120596
)
(
V
) = (
119903V minus 119902120596
119901120596 minus 119903119906
119902119906 minus 119901V) +
1
119898(
119891119909
119891119910
119891119911
)
(
120601
120579
) = (
1 119904120601119905120579
119888120601119905120579
0 119888120601
minus119904120601
0 119904120601119888120579
119888120601119888120579
)(
119901
119902
119903
)
(
119902
119903
) =
(((
(
119869119910minus 119869
119911
119869119909
119902119903
119869119911minus 119869
119909
119869119910
119901119903
119869119909minus 119869
119910
119869119911
119901119902
)))
)
+((
(
1
119869119909
120591120601
1
119869119910
120591120579
1
119869119911
120591120595
))
)
(16)
Equation (16) is a full nonlinear model for a quadrotorin which the complex dynamics is shown obviously such asstrong nonlinearity like the multiplication between systemstates intensive coupling among the variables and the mul-tivariable features intuitively that imposes the difficulties onthe controller design and on the other hand attracts greatinterest of research
42 Forces and Moments The forces and torques that acton the quadrotor are primarily due to gravity and thefour propellers shown in Figure 3 The steady-state thrust119865119894generated by a hovering rotor (ie a rotor that is not
translating horizontally or vertically) in free air coincideswithminus119885
119861axisThe total force acting on the quadrotor is given
by
119865 = 119865119891+ 119865
119903+ 119865
119887+ 119865
119897 (17)
The rolling torque the pitching torque and the totalyawing torque are given by
120591120601= 119897 (119865
119897minus 119865
119903) 120591
120579= 119897 (119865
119891minus 119865
119887)
120591120595= 120591
119903+ 120591
119897+ 120591
119891+ 120591
119887
(18)
The gravity force acting on the center of mass is given by
119891119887
119892= 119877
119879(
0
0
119898119892
) = (
minus119898119892119904120579
119898119892119888120579119904120601
119898119892119888120579119888120601
) (19)
Equation (16) shows strong coupled dynamics [48] thespeed change of one rotor gives rise to motion in at least 3degrees of freedom For instance the speed decrease of theright rotor will roll the craft to the right under the imbalancebetween left and right lift forces coupled with the rotorcraftrsquosyaw to the right due to the imbalance in torque betweenclockwise and counter-clockwise so the translation changesdirection toward the front
Nevertheless in some cases that the rotating movementis slight the Coriolis terms 119902119903 119901119903 and 119901119902 are small and can
6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
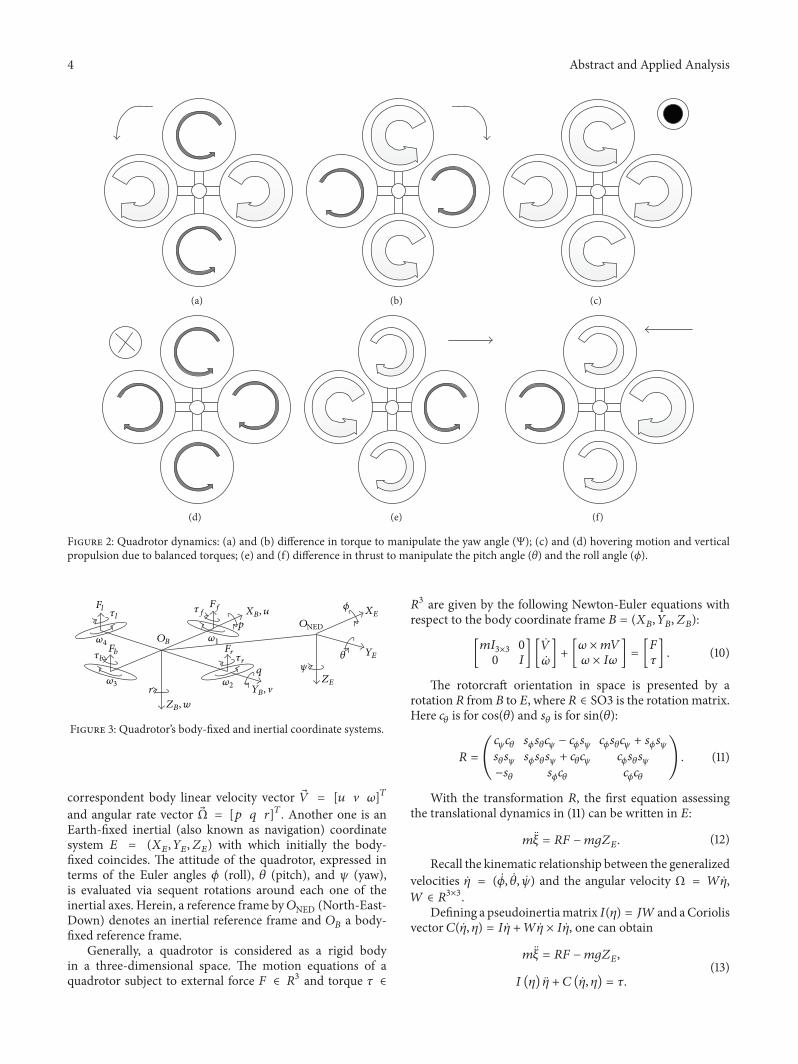
4 Abstract and Applied Analysis
(a) (b) (c)
(d) (e) (f)
Figure 2 Quadrotor dynamics (a) and (b) difference in torque to manipulate the yaw angle (Ψ) (c) and (d) hovering motion and verticalpropulsion due to balanced torques (e) and (f) difference in thrust to manipulate the pitch angle (120579) and the roll angle (120601)
Fl120591l
1205964Fb120591b
1205963r
Ff120591f
1205961
p
Fr120591r
1205962
q
ONED
120601
120579120595
XB u
ZB w
OB
YB ZE
YE
XE
Figure 3 Quadrotorrsquos body-fixed and inertial coordinate systems
correspondent body linear velocity vector = [119906 V 120596]119879
and angular rate vector Ω = [119901 119902 119903]119879 Another one is an
Earth-fixed inertial (also known as navigation) coordinatesystem 119864 = (119883
119864 119884
119864 119885
119864) with which initially the body-
fixed coincides The attitude of the quadrotor expressed interms of the Euler angles 120601 (roll) 120579 (pitch) and 120595 (yaw)is evaluated via sequent rotations around each one of theinertial axes Herein a reference frame by119874NED (North-East-Down) denotes an inertial reference frame and 119874
119861a body-
fixed reference frameGenerally a quadrotor is considered as a rigid body
in a three-dimensional space The motion equations of aquadrotor subject to external force 119865 isin 119877
3 and torque 120591 isin
1198773 are given by the following Newton-Euler equations with
respect to the body coordinate frame 119861 = (119883119861 119884
119861 119885
119861)
[119898119868
3times30
0 119868] [
] + [
120596 times 119898119881
120596 times 119868120596] = [
119865
120591] (10)
The rotorcraft orientation in space is presented by arotation 119877 from 119861 to 119864 where 119877 isin SO3 is the rotationmatrixHere 119888
120579is for cos(120579) and 119904
120579is for sin(120579)
119877 = (
119888120595119888120579
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119904120579119904120595
119904120601119904120579119904120595+ 119888
120579119888120595
119888120601119904120579119904120595
minus119904120579
119904120601119888120579
119888120601119888120579
) (11)
With the transformation 119877 the first equation assessingthe translational dynamics in (11) can be written in 119864
119898 120585 = 119877119865 minus 119898119892119885119864 (12)
Recall the kinematic relationship between the generalizedvelocities 120578 = ( 120601 120579 ) and the angular velocity Ω = 119882 120578119882 isin 119877
3times3Defining a pseudoinertiamatrix 119868(120578) = 119869119882 and aCoriolis
vector 119862( 120578 120578) = 119868 120578 + 119882 120578 times 119868 120578 one can obtain
119898 120585 = 119877119865 minus 119898119892119885119864
119868 (120578) 120578 + 119862 ( 120578 120578) = 120591
(13)
Abstract and Applied Analysis 5
This model has the same structure as the one obtained bythe Euler-Lagrange approach in which the main difference isthe expressions of 119868 and119862 which aremore complex andmoredifficult to implement and to compute in the case of the Euler-Lagrange method It is important to note that the model (13)is common for all aerial robots with six degrees of freedom
4 Basic Dynamic Model of a Quadrotor
This section introduces the basic quadrotor dynamic mod-eling with rigid body dynamics and kinematics This modelbased on the first order approximation has been successfullyutilized in various quadrotor control designs so far
In the first place some assumptions are reasonable andessential shown as follows [44]
(i) The structure is supposedly rigid(ii) The structure is supposedly symmetrical(iii) The CoG (center of gravity) and the body fixed frame
origin are assumed to coincide
41 Dynamic Model of a Quadrotor As we know Newtonsecond law is applied to the translational motion in inertialframes [47] From the equation of Coriolis one can obtain
119898dkd119905
119894
= 119898(dkd119905
119887
+ 120596119887119894
times k) = f (14)
where119898 is themass of the quadrotor f119887 ≜ (119891119909
119891119910
119891119911)119879 is the
total force applied to the quadrotor and k is the translationalvelocity 120596
119887119894is the angular velocity of the airframe with
respect to the inertial frame Since the control force iscomputed and applied in the body coordinate system andsince 120596 is measured in body coordinates (14) is expressed inbody coordinates where k119887 ≜ (119906 V 120596)119879 and w119887
119887119894≜ (119901 119902 119903)
119879For rotational motion Newtonrsquos second law state is
dhd119905
119894
=dhd119905
119887
+ 120596119887119894
times h = m (15)
where h is the angular momentum and m is the appliedtorque h119887 = Jw119887
119887119894 J is the constant inertia matrix The
quadrotor is essentially symmetric about all three axes whichimplies that J = diag(119869
119909 119869119910 119869119911)
Givenm119887≜ (120591
120601 120591
120579 120591
Ψ)119879 which denote the rolling torque
the pitching torque and the total yawing torque are inducedby the rotor thrust and rotor drag acting on the airframe
The six-freedom-degree model for the quadrotor kine-matics and dynamics can be summarized as follows
(
119910
) = (
119888120579119888120595
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119888120579119904120595
119904120601119904120579119904120595+ 119888
120601119888120595
119888120601119904120579119904120595minus 119904
120579119888120595
119904120579
minus119904120601119888120579
minus119888120601119888120579
)(
119906
V120596
)
(
V
) = (
119903V minus 119902120596
119901120596 minus 119903119906
119902119906 minus 119901V) +
1
119898(
119891119909
119891119910
119891119911
)
(
120601
120579
) = (
1 119904120601119905120579
119888120601119905120579
0 119888120601
minus119904120601
0 119904120601119888120579
119888120601119888120579
)(
119901
119902
119903
)
(
119902
119903
) =
(((
(
119869119910minus 119869
119911
119869119909
119902119903
119869119911minus 119869
119909
119869119910
119901119903
119869119909minus 119869
119910
119869119911
119901119902
)))
)
+((
(
1
119869119909
120591120601
1
119869119910
120591120579
1
119869119911
120591120595
))
)
(16)
Equation (16) is a full nonlinear model for a quadrotorin which the complex dynamics is shown obviously such asstrong nonlinearity like the multiplication between systemstates intensive coupling among the variables and the mul-tivariable features intuitively that imposes the difficulties onthe controller design and on the other hand attracts greatinterest of research
42 Forces and Moments The forces and torques that acton the quadrotor are primarily due to gravity and thefour propellers shown in Figure 3 The steady-state thrust119865119894generated by a hovering rotor (ie a rotor that is not
translating horizontally or vertically) in free air coincideswithminus119885
119861axisThe total force acting on the quadrotor is given
by
119865 = 119865119891+ 119865
119903+ 119865
119887+ 119865
119897 (17)
The rolling torque the pitching torque and the totalyawing torque are given by
120591120601= 119897 (119865
119897minus 119865
119903) 120591
120579= 119897 (119865
119891minus 119865
119887)
120591120595= 120591
119903+ 120591
119897+ 120591
119891+ 120591
119887
(18)
The gravity force acting on the center of mass is given by
119891119887
119892= 119877
119879(
0
0
119898119892
) = (
minus119898119892119904120579
119898119892119888120579119904120601
119898119892119888120579119888120601
) (19)
Equation (16) shows strong coupled dynamics [48] thespeed change of one rotor gives rise to motion in at least 3degrees of freedom For instance the speed decrease of theright rotor will roll the craft to the right under the imbalancebetween left and right lift forces coupled with the rotorcraftrsquosyaw to the right due to the imbalance in torque betweenclockwise and counter-clockwise so the translation changesdirection toward the front
Nevertheless in some cases that the rotating movementis slight the Coriolis terms 119902119903 119901119903 and 119901119902 are small and can
6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 5
This model has the same structure as the one obtained bythe Euler-Lagrange approach in which the main difference isthe expressions of 119868 and119862 which aremore complex andmoredifficult to implement and to compute in the case of the Euler-Lagrange method It is important to note that the model (13)is common for all aerial robots with six degrees of freedom
4 Basic Dynamic Model of a Quadrotor
This section introduces the basic quadrotor dynamic mod-eling with rigid body dynamics and kinematics This modelbased on the first order approximation has been successfullyutilized in various quadrotor control designs so far
In the first place some assumptions are reasonable andessential shown as follows [44]
(i) The structure is supposedly rigid(ii) The structure is supposedly symmetrical(iii) The CoG (center of gravity) and the body fixed frame
origin are assumed to coincide
41 Dynamic Model of a Quadrotor As we know Newtonsecond law is applied to the translational motion in inertialframes [47] From the equation of Coriolis one can obtain
119898dkd119905
119894
= 119898(dkd119905
119887
+ 120596119887119894
times k) = f (14)
where119898 is themass of the quadrotor f119887 ≜ (119891119909
119891119910
119891119911)119879 is the
total force applied to the quadrotor and k is the translationalvelocity 120596
119887119894is the angular velocity of the airframe with
respect to the inertial frame Since the control force iscomputed and applied in the body coordinate system andsince 120596 is measured in body coordinates (14) is expressed inbody coordinates where k119887 ≜ (119906 V 120596)119879 and w119887
119887119894≜ (119901 119902 119903)
119879For rotational motion Newtonrsquos second law state is
dhd119905
119894
=dhd119905
119887
+ 120596119887119894
times h = m (15)
where h is the angular momentum and m is the appliedtorque h119887 = Jw119887
119887119894 J is the constant inertia matrix The
quadrotor is essentially symmetric about all three axes whichimplies that J = diag(119869
119909 119869119910 119869119911)
Givenm119887≜ (120591
120601 120591
120579 120591
Ψ)119879 which denote the rolling torque
the pitching torque and the total yawing torque are inducedby the rotor thrust and rotor drag acting on the airframe
The six-freedom-degree model for the quadrotor kine-matics and dynamics can be summarized as follows
(
119910
) = (
119888120579119888120595
119904120601119904120579119888120595minus 119888
120601119904120595
119888120601119904120579119888120595+ 119904
120601119904120595
119888120579119904120595
119904120601119904120579119904120595+ 119888
120601119888120595
119888120601119904120579119904120595minus 119904
120579119888120595
119904120579
minus119904120601119888120579
minus119888120601119888120579
)(
119906
V120596
)
(
V
) = (
119903V minus 119902120596
119901120596 minus 119903119906
119902119906 minus 119901V) +
1
119898(
119891119909
119891119910
119891119911
)
(
120601
120579
) = (
1 119904120601119905120579
119888120601119905120579
0 119888120601
minus119904120601
0 119904120601119888120579
119888120601119888120579
)(
119901
119902
119903
)
(
119902
119903
) =
(((
(
119869119910minus 119869
119911
119869119909
119902119903
119869119911minus 119869
119909
119869119910
119901119903
119869119909minus 119869
119910
119869119911
119901119902
)))
)
+((
(
1
119869119909
120591120601
1
119869119910
120591120579
1
119869119911
120591120595
))
)
(16)
Equation (16) is a full nonlinear model for a quadrotorin which the complex dynamics is shown obviously such asstrong nonlinearity like the multiplication between systemstates intensive coupling among the variables and the mul-tivariable features intuitively that imposes the difficulties onthe controller design and on the other hand attracts greatinterest of research
42 Forces and Moments The forces and torques that acton the quadrotor are primarily due to gravity and thefour propellers shown in Figure 3 The steady-state thrust119865119894generated by a hovering rotor (ie a rotor that is not
translating horizontally or vertically) in free air coincideswithminus119885
119861axisThe total force acting on the quadrotor is given
by
119865 = 119865119891+ 119865
119903+ 119865
119887+ 119865
119897 (17)
The rolling torque the pitching torque and the totalyawing torque are given by
120591120601= 119897 (119865
119897minus 119865
119903) 120591
120579= 119897 (119865
119891minus 119865
119887)
120591120595= 120591
119903+ 120591
119897+ 120591
119891+ 120591
119887
(18)
The gravity force acting on the center of mass is given by
119891119887
119892= 119877
119879(
0
0
119898119892
) = (
minus119898119892119904120579
119898119892119888120579119904120601
119898119892119888120579119888120601
) (19)
Equation (16) shows strong coupled dynamics [48] thespeed change of one rotor gives rise to motion in at least 3degrees of freedom For instance the speed decrease of theright rotor will roll the craft to the right under the imbalancebetween left and right lift forces coupled with the rotorcraftrsquosyaw to the right due to the imbalance in torque betweenclockwise and counter-clockwise so the translation changesdirection toward the front
Nevertheless in some cases that the rotating movementis slight the Coriolis terms 119902119903 119901119903 and 119901119902 are small and can
6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Abstract and Applied Analysis
120591
F
Attitudedynamics
p q r
Position
dynamics
x y z
u w
120593 120579 120595
Figure 4 Simplified block diagram of the quadrotorrsquos dynamics
be neglected So the dynamics of the quadrotor is simplifiedand given as [47]
=
(minus119888120601119904120579119888120595minus 119904
120601119904120595) 119865
119898
119910 =
(minus119888120601119904120579119904120595+ 119904
120601119888120595) 119865
119898
=
119892 minus 119888120601119888120579119865
119898
120601 =1
119869119909
120591120601
120579 =1
119869119910
120591120579
=1
119869119911
120591120595
(20)
This model is shown in Figure 4 to which two diagramsin [49 50] are similar Note that the attitude of quadrotoris changed subject to the input 120591 (moment) produced byeach rotor However the positionaltitude dynamics block isaffected by 119879
119895and angle variables
Intuitively Figure 4 gives the insight of the dynamic of thequadrotor that the angles and their time derivatives do notdepend on translation components whereas the translationsdepend on angle (and not on angular velocities) [50] Basedon the characteristics of the dynamics a quadrotor controlproblem can be split into two distinct control problemsthe inner attitudealtitude loop designed for stability andtracking of desired Euler angles and the outer 119883 119884 and 119885
position loops for regulating the vehicle position [27]State space equations are applied in the control design and
system identification generally Hence the nonlinear systemof a quadrotor is illustrated as the formulation which isdescribed in different manner in [3 27 51]
= 119891 (119909) + 119892 (119909)119880 (21)
where
119909 = [119909 119910 119911 120595 120579 120601 119906 V 120596 119901 119902 119903]119879
119910 = [119909 119910 119911 120595]119879
119880 = [119865 120591120601 120591
120579 120591
120595]119879
(22)
Herein the output 119910 is composed of 119909 119910 119911 and 120595 isfor the trajectory track but if for the hovering control119910 = [120601 120579 120595 119885]
119879 should be selected because in translationmovement shown in (22) the three state variables 119909 119910 and119911 are subordinated to the same control parameter 119865 henceonly one state is controllable and the others are subjected tothe controlled translation and angular motions
43 Gyroscopic Torques At the normal attitude namelyEuler angles are zero and the axes of the rotors with higherspeeds spinning are coincident with the 119911
119861axis of the robot
frame However while the quadrotor rolls or pitches thedirection of the angular momentum vectors of the fourmotors is forced to be changed A gyroscopic torque will beimposed on the airframe that attempts to turn the spinningaxis so that it aligns with the precession axis It is noted thatno gyroscopic torque occurs with rotation around the 119911
119861
axis (yaw) because the spin and precession axes are alreadyparallel [52]
The gyroscopic (inertial) moment is modeled in [53] as
119887
119866
119869=
4
sum
119894=1
119869119903(120596
119887119894times [
[
0
0
1
]
]
)Ω119894 (23)
where 119869119903is the gyroscopic inertia namely that of the rotating
part of the rotor and Ω119894is the angular rate of the rotor 119894 (119894 =
1 2 3 4)
44 Quaternion Differential Equations A problem so calledgimbal lock will appear with the Euler angle 120579 close to120579 = 90
∘ and then the Roll angle 120601 loses its meaningTo overcome this problem the quaternion method whichoffers a mathematical notation that allows the representationof three-dimensional rotations of objects in 4D space isselected to be the alternative remedy Reference [54] gives aquaternion dynamics description and [55] proposes a newquaternion-based feedback control scheme for the attitudestabilization of a quadrotor aircraft
In fact every parameterization fails to fully representrigid body pose in every case That is to say Euler anglescannot globally represent rigid body pose owing to thegimbal lock whereas quaternions cannot define it uniquely[56] Although researchers proved the effectiveness of usingquaternions to describe aircraft dynamics Euler angles arestill the most common way of representing rigid body pose
45 Linearized Model The full nonlinear model is veryuseful as it provides insight into the behavior of the vehicleHowever a linear model is used widely which attributes tothe abundance of well-studied tools available for the controlsystemdesignAswe can seemost of the controllers are basedon the nonlinear model with hover conditions and are stableand effective only around reasonably small angles
Typically the linearization of a nonlinear state spacemodel = 119891(119909) + 119892(119909)119880 is executed at an equilibrium pointof the model
(119909lowast 119880
lowast) 119891 (119909
lowast) + 119892 (119909
lowast) 119880
lowast= 0 (24)
Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 7
Then the linear model is derived by
119860 =120597119891
120597119909| 119909 = 119909
lowast 119861 = 119892 (119909
lowast) (25)
As the hovering is one of the most important regimes fora quadrotor at this point the condition of equilibrium of thequadrotor in terms of (24)-(25) is given as in [54]
(119880lowast 119909
lowast)
119880lowast
1= 119898119892
119880lowast
234= 0
119909lowast
3567891011= 0
119909lowast
12412= random constant
(26)
While hovering some assumptions are reasonable suchas the negligible influence of external forces and momentson the aircraft and small velocities and rotational velocitiesBy performing a Taylor series expansion and eliminatingthe higher order terms on (20) and using small angleapproximations a linear model is given [38 57ndash59]
120601 = 119901
120579 = 119902
= 119903
= minus119892120579
V = 119892120601
= 119892 minus119865
119898
119868119909119909 = 120591
120601
119868119910119910
119902 = 120591120579
119868119911119911
119903 = 120591120595
(27)
Then the state vector is = [119906 V 119908 119901 119902 119903 120601 120579 120595]119879 Here
the deviations from the trim value act as the states to beconsidered and all further references to aircraft states areunderstood to refer to the perturbation states
Distinctly different to the linearization at hoveringregime [60] presents a new scheme which has never beforebeen considered in quadrotor control in which the lin-earizations at four points of equilibria are conducted Thefour linearizations represent different operating modes in aquadrotor flight mission These operating modes are
(i) hover(ii) vertical motion with a constant velocity(iii) horizontal translation with a constant pitch angle tilt(iv) horizontal translation with a constant roll angle tilt
All four linearizations produce four linear time-invariantsystems and four controllers accordingly that are simple low-order and decentralized and have integral-action designedfor the system stabilization despite of the issues of controllerswitch between two linear systems
5 Aerodynamic Effects
In most of research projects quadrotor dynamics has oftenignored known aerodynamic effects of rotorcraft vehiclesbecause only the stability while hovering is the aim asstated before At slow velocities such as while hoveringthis is indeed a reasonable assumption [61] However incase of demanding flight trajectories such as fast forwardand descent flight manoeuvres as well as in the presence ofthe In Ground Effect these aerodynamic phenomena couldsignificantly influence quadrotorrsquos dynamics [33] and theperformance of control will be diminished if aerodynamiceffects are not considered [62] especially in situations wherethe aircraft is operating at its limits (ie carrying heavy loadsingle engine breakdown etc)
Acting as a propulsion system the aerodynamics ofrotors plays the most important role on the movementof the quadrotor excepted with gravity and air drag withrespect to the airframe The kinematics and dynamics ofthe rotors are fairly complex resulting from the combina-tion of several types of motion such as rotation flappingfeathering and lagging normally the last two items areneglectable [3 4] The theoretical models based on the bladeelement theory (BET) combined with momentum theory(MT) show many advantages such as more flexible moresimple and convenient in contrast with the empirical modelsbased on empirical data typically obtained in the windtunnel
Note that the application of helicopter theory to a quadro-tor is not straightforward for the reason of many importantdifferences between conventional helicopter and quadrotor[1] In order to address the issues the specific researchwith the aim at a quadrotor vehicle is necessary to establishfull model with complex dynamics subject to aerodynamicforces and moments Many works [33 40 62ndash66] on rotormodel have been done based on the results obtained forconventional helicopters [67]
Blade flapping is of significant importance in under-standing the natural stability of quadrotors [4] Since itinduces forces in the 119909-119910 rotor plane of the quadrotor theunderactuated directions in the dynamics high gain controlcannot easily be implemented against the induced forcesOn the other hand the total thrust variation owing to thevertical maneuver also imposes nonignorable influence onthe quadrotor behavior
51 Total Thrust In case of simplifications in aerodynamiceffects the assumption that a rotorrsquos thrust is proportionalto the square of its angular velocity is the most commonconsideration However it is proved that this assumptionabout rotorrsquos thrust is especially far from reality in the casesof nonhovering regime
The helicopter literatures [67ndash69] give analysis aboutmany effects on the total thrust in more detail in whichtranslation lift and change of angle of attack act as the tworelated effects As a rotorcraft flighs across translation themomentum of the airstream induces an increase in lift forcewhich is known as translational liftThe angle of attack (AOA)of the rotor with respect to the free-stream also influences
8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Abstract and Applied Analysis
the lift with an increase in AOA increasing thrust just likein aircraft wings
Applying blade element theory to quadrotor construc-tion the expression for rotor thrust 119879 is given in [56]
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
(28)
and a thrust coefficient 119862119879is given in
119862119879= (
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888 (29)
where120583120582119894 and120582
119888are speed coefficients119881
119909119910119877Ω119881
119911119877Ω and
V119894119877Ω respectively119881
119909119910and119881
119911are the horizontal and vertical
components of the total air stream velocity respectivelyand V
119894is the induced velocity and Ω is rotor angular
speed Herein the other parameters and coefficients in theformulation above will not be described and refer to theliterature [56]
Especially at hovering regime120583 = 0 and120582119888= 0 (ie static
conditions) yield
119879 =1
2120588119886119888119877
3(Θ
34minus 120582
119894)Ω
2 (30)
So one can obtain 119879 sub Ω2 just like the relationship between
119879 andΩ used in the upwards contextFor the calculation of the aerodynamic coefficient 119862
119879it
is crucial to know three airspeed coefficients 120583 120582119888 and 120582
119894
Two of them 120583 120582119888 can easily be obtained from the available
motion data119881119909119910119881
119911 andΩ119877120582
119894however is very hard to know
because it is impossible to measure the induced velocity V119894
One can solve this problem by means of calculating theinduced velocity coefficient 120582
119894involved in the two aerody-
namic principals momentum and blade element theories Inview of the fact that the macroscopic momentum equationand the microscopic blade element equation give the samerotor thrust formulation
119879 =119873120588119886119888119877
3Ω2
4[(
2
3+ 120583
2)Θ
0minus (1 + 120583
2)Θ119905119908
2minus 120582
119894minus 120582
119888]
= 21205881198772120587120582
119894radic(120582
119888+ 120582
119894)2+ 1205832 +
1205822
119888
767
(31)
The results of solving this equation can be shown inFigure 5
The induced velocity decreases with an increase of airflowproduced by quadrotor movement which can be seen inFigure 5 Although both directionrsquos movements in 119909-119910 planetend to increase induced velocity only the vertical movementdecreases the thrust coefficient As a result during takeoff thequadrotor loses rotor thrust but during horizontalmovementthat same thrust is increased and enables more aggressivemaneuvers [62 70]
200
150
100
50
0minus005 0
005 01 015 minus02
0
02
120583
120582c
TT
0(
)
Figure 5 1198791198790ratio during 119909-119910 plane movement [61]
h
mg
Figure 6 Effect of blade flapping [33]
52 Blade Flapping When a rotor translates horizontallythrough the air the advancing blade of the rotor has a highervelocity relative to the free-stream and will generate morelift than the retreating blade which sees a lower effectiveairspeedThis causes an imbalance in lift inducing an up anddown oscillation of the rotor blades which is known as bladeflapping [63 64]When a quadrotor is in steady state sufferingthe blade flapping its rotor plane will tilt at some angle off ofvertical causing a deflection of the thrust vector illustrated inFigure 6
In fact the rotor thrust is perpendicular to the rotor planeand not to the hub of the rotor Thus in the case of bladeflapping the rotor disk tilts the rotor thrust is also inclinedwith respect to the airframe and imposes a component in the119909 and 119910 directions of the body-fixed frame As a result theflapping of the blades results in a variety of effects on thedynamics of the vehicle and in particular affecting attitudecontrol performance [65] owing to the reason that a momentis produced for the rotor plane aligned with the vehiclersquoscenter of gravity and the effect increases with speed
Note that the lateral flapping was neglected in aboveconsiderations as due to quadrotorrsquos symmetry and in-paircounter rotation of rotors its net influence is negligiblysmall in all instances of forward flight Hence there are twomoments that need to be considered First of all the moment
Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 9
119872119887lon is caused by the longitudinal thrust due to a deflection
angle 1205721119878between the rotor plane and rotorcraft platform
119872119887lon = 119879ℎ sin120572
1119878 (32)
where ℎ is the vertical distance from the rotor plane to thecenter of gravity of the vehicle and 119879 is the thrust
In addition in the case of stiff rotors without hinges atthe hub there is also a moment119872
119887119904generated directly at the
rotor hub from the flapping of the blades
119872119887119904
= 1198961205731205721119878 (33)
where 119896120573is the stiffness of the rotor blade in Nmrad The
total longitudinal moment created by blade flapping 119872119887119891
isthe sum of these two moments
119872119887119891
= 119872119887lon + 119872
119887119904 (34)
Although a controller designed exactly is possibly suc-cessful to counteract small disturbances it is difficult to rejectthe large systematic disturbances that result from the aerody-namic effects such as blade flapping For the improvement ofcontrol performance it is necessary to design a feed forwardcompensation block in order to cancel out moments andforces resulting from blade flapping and variations in totalthrust [33]
53 Ground Effect and Ceiling Effect When a rotor operatesnear the ground (about at half rotor diameter) a phe-nomenon always appears that thrust augmentation pushesthe vehicle away from the ground which is related to areduction of the induced airflow velocity This is calledground effect [71 72] Different from other approaches anadaptive technique [73] is an option to deal with this effectHowever for the aim of improvement of the autonomousVTOL controller a principal model of this effect is needed
One proposed mathematical model of ground effect [74]is
119879
119879infin
=1
1 minus (1198774119885)2 (35)
Here 119877 is the radius of the rotor 119911 is the vertical distancefrom the ground 119879 is the thrust produced by the propellerin ground effect and 119879
infinis the thrust produced at the same
power outside of ground effect Note that for 119911119877 = 2 thepredicted ratio between 119879 and119879
infinis just 1016Therefore this
formula (35) predicts that ground effect is negligible whenthe rotor is more than one diameter off the ground that is119911119877 gt 2
Except for the ground effects a ldquoceiling effectrdquo is anotherissue needs to be researched the reason is a quadrotor canflight indoor different from conventional helicopter In factso called ldquoceiling effectrdquo means when the vehicle is close to anoverhead plane the ceiling effect pulls the vehicle towards theceiling which can cause a crash in the worst case The effectshave been proved by a set of experiments Unfortunately noformal formulation of a ceiling effect is presented so far
6 Identification of a Quadrotor Model
Model is the foundation and the first step of control andsimulation In general system models are derived fromfirst principles physical insight and sometimes input andoutput data and the last two items are classified as systemidentification As for a Quadrotor the first principle schemeis intuitive to obtain the dynamical model perhaps fromthe inheritance of traditional flight mechanics by whichthe relationship between the inputs and outputs that isthe underlying dynamics is revealed distinctly Howeveron the other hand the mathematical formulation proposedis characterized by the unwelcome complexity and strongnonlinearity that is regarded as a nightmare for controllerdesign
As a alternative solution system identification is effectiveto derive amodel System identification as the art and scienceof building mathematical models of dynamic systems fromobserved input-output data has developed for few decadesstarting from the year 1965 and enormous methods arepresented However there are many open problems [75 76]such as nonlinearity and closed-loop identification which arejust the characteristics shown in the quadrotor dynamics
Significantly the attention on the model and identifica-tion aspect is paid on the fixed-wing and helicopter [34]instead of quadrotor or multirotor and the reason maybe the fact of less applications of quadrotor aircraft bynow as well as relative complicated dynamics which exhibitsome distinctive features on the modeling and identificationschemes presented as follows [77]
(i) Continuous-time model is preferable In aerospaceapplications a continuous-time model looks morepopular than the discrete-time one for the reason ofintuition
(ii) To support closed-loop identification a quadrotorsystem is basically open-loop unstable so that iden-tification experiments have to be implemented inclosed loop under automatic control or with a humanoperator
(iii) To uncouple the cross-interaction among the oper-ation axes the cross-coupling in dynamic behaviorimposes difficulty on the estimation of a model sothat isolation of different dynamicmodes is necessaryto alleviate this effect
To the best of my knowledge although not many someschemes dedicated to the quadrotor model identificationare proposed in the following Herein by means of theclassification in the literature [75] so called a whole paletteof grey shades from white to black these methods areintroduced successively
61 Off-White Models Parameters Estimate Based on FirstPrinciple Model A set of parameter estimates in the non-linear quadrotor model could be taken directly from mea-surements a CAD model using model software like SOLID-WORKS to model all the parts of the quadrotor or derivefrom experiments along with the associated error [66 70
10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Abstract and Applied Analysis
120574
u
minus
C(s)
G(s)(y y)T
Figure 7 Indirect closed-loop identification setup
78] The parameters listed in the following context can beobtained by a regular identification method [79ndash81]
(i) Aerodynamic parameters rotor blade and aerody-namic parameters are obtained through measure-ment computation simulation or from references
(ii) Masses and displacements component masses anddistances aremeasuredwith respect to the rotor plane
(iii) Rotational inertia is obtained through measurementand computation [2]
(iv) Motor constants resorting to some experiments con-ducted themotormodel can be simplified to be a firstorder system and the constants could be extractedfrom the experimental data [82 83]
The nonlinear identification problem is to estimate suchparameters from the measured data In general this is a dif-ficult problem that has not yet been treated in full generalityIn [84] a Levenberg-Marquardt optimization method and aquadratic optimization method are applied respectively toobtain the 119911 inertia and the rotor parameters
62 Steel-Grey Models Local Linear Models IdentificationNonlinear systems are often handled by linearization arounda working point The idea behind composite local models isto deal with the nonlinearities by developing local modelswhich are good approximations in different neighborhoodsand then compose a global model from these Often the localmodels are linear so a common name for composite modelsis also local linear models [75] as described in Section 45where the hover regime is acted as a working point Afterthe linearization at working point the identification issueis simplified and easy to tackle with the help of linearidentification methods as follows However the linearizationis a realistic simplification after all which results in the biaseven model mismatch and sometimes is unreasonable in thecase of aggressive maneuvers In addition a set of modelsneed to be derived in the situations that many working pointsexist so the switch between two models in the model setshould be paid enough attention to weaken the disturbance
621 Parameter Identification Using the linearized systemdynamics after some treatments such as neglecting the non-linear coupling terms a parameter identification [85] is per-formed to identify separately each quadrotor axis performedin closed loop The generic scheme of the identificationprocess is depicted in Figure 7
The controller 119862(119904) used during identification is a simplestabilizing hand-tuned PD-controller with known parame-ters Using linearized system dynamics equation the iden-tification signal that is a pseudorandom binary sequence(PRBS) of full length and the controller 119862 and outputdata (119910 119910)
119879 one can use nonlinear optimization to estimatethat our parameter vectors Δ
120601120579= (119901 119869 119879
119889)119879 and Δ
120595=
(119901 119911 119869 119879119889)119879 are conducted respectively The experimental
results show a very good correlation with real data whichconfirms the proposed approach in which an iterative param-eter identification scheme is applied the results of whichcan easily be reproduced and offers great accuracy In gen-eral a regular procedure is implemented for the parameteridentification in which a linear model is derived from thenonlinear one with some simplification and neglecting andthen a parameter identification problem is shown at last aiterative algorithm is applied to obtain the estimated value ofthe parameters just like what is described in this literatureNext an adaptive controller could be designed based on theparameter identification
622 Time Domain Identification Reference [86] presentsthe estimation of a linearmathematicalmodel for the dynam-ics of a quadrotor by time domain system identification
At first the model structure has to be determined bythe begin with a large pool of potential candidate regressorsmeaning states or control inputs or some combinationthereof then calculate the potential correlation of eachregressor with a state derivative using a linear least-squaresmethod The final step in the process is to retain thoseregressors which have a significant correlation with the statederivative in question The level of correlation is determinedby the user so as to capture asmuch of themeasured behavioras possible with aminimal number of regressors An exampleof such a pool of regressors is given as follows
= 119883119906119906 + 119883
119902119902 + 119883
120579120579 + 119883lon120575lon (36)
where the state derivative is linearly related to the regres-sors 119906 119902 120579 and 120575lon by their corresponding parameters119883
119906
119883119902119883
120579 and119883lonThis process of regressor pool correlation is
repeated for each state derivativeAfter the appropriate model structure has been deter-
mined the next step is to determine the value and error ofeach parameter by a linear least squaresmethodThese valuesform the dynamics and control matrices 119860 and 119861 At thesame time the error values are also adjusted to account forany remaining uncharacterized behavior known as coloredresiduals
Themethod herein is considered as the basic algorithm inthe realm of system identification which is used to addressthe model identification issue of linear system It should benoted that the method is desirable for the SISO (single inputand single output) system therefore such characteristics ascross-coupling must be mitigated in advance
623 Frequency-Domain Identification A frequency-domain system identification method is used to obtain
Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 11
a linear representation of the quadrotor dynamics [87]Contrast to time domain analysis frequency-domainidentification can obtain a relative robust model with thetreatment of cutting down the errors associated with biaseffects and processing noise resulting in a robust model
In the algorithm the frequency response data acquired isvalidated by evaluating its coherence which is an indicationof how well the output and input data are correlated Thedefinition of coherence is given as
Υ2
119909119910120596 =
10038161003816100381610038161003816119866119909119910(119891)
10038161003816100381610038161003816
2
10038161003816100381610038161003816119866119909119909
(119891)10038161003816100381610038161003816
10038161003816100381610038161003816119866119910119910
(119891)10038161003816100381610038161003816
(37)
where119866119909119909(119891)119866
119910119910(119891) and119866
119909119910(119891) represent the autospectral
densities of the input output and cross-spectral density of theinput and output respectively and are the frequency pointA perfect correlation between input and output would resultin a coherence value of unity while poor coherence typicallyfalls below a value of 06
It might also be noted that the data must be decoupledsuch that the inputs provided by off-axis commands arerejected from the output on the axis of interest after thecoherence of the data is validated The multiple single outputsystem estimation can be expressed in (38) where is thesystem estimation
(119891) = 119866minus1
119909119909(119891)119866
119909119910(119891) (38)
In the system identification process the transfer func-tions of each axis will be acquired first followed by state spacerepresentations and complete system analysis The singleinput-single output (SISO) transfer function identificationcost function can be defined as
119869 =20
119899120596
120596119899120596
sum
1205961
119882120574[119882
119892(10038161003816100381610038161003816119888
10038161003816100381610038161003816minus |119879|)
2
+ 119882119901(ang
119888minus ang119879)
2
] (39)
where the parameters such as 119899120596 120596
1refer to [87]
As shown in [87] based on the rational experimentalsetup a frequency-domain system identification methodobtains a linear representation of the quadrotor dynamics Itmight also be noted that the choice of the periodic excitationsignal is tominimize leakage in the computation of frequencyspectra which is still an open problem in the area
624 Subspace Model Identification A subspace modelidentification (SMI) method [77] which has been provedextremely successful in dealing with the estimation of state-space models for multiple-input multiple-output (MIMO)systems is used to the identification of a quadrotor flightdynamics More precisely the continuous-time predictorbased subspace identification approach proposed is appliedto flight data collected during dedicated identification exper-iments and at hovering flight condition a linear state-space model is derived As an advantage over the mostidentification techniques this approach is feasible for theapplication in a closed-loop systemas the correlation between119906 and 119908 V is not required The key ideas of the algorithm areprovided in the following
Consider the linear time-invariant continuous-time sys-temd119909 (119905) = 119860119909 (119905) d119905 + 119861119906 (119905) d119905 + d119908 (119905) 119909 (0) = 119909
0
d119911 (119905) = 119862119909 (119905) d119905 + 119863119906 (119905) d119905 + dV (119905)
119910 (119905) d119905 = d119911 (119905)
(40)
where 119909 isin 119877119899 119906 isin 119877
119898 and 119910 isin 119877119901 are respectively the state
input and output vectors and 119908 isin 119877119899 and V isin 119877
119901 are theprocess and the measurement noise respectively modeled asWiener processes with incremental covariance given by
119864[d119908 (119905)
dV (119905)] [d119908(119905)
dV(119905)]119879
= [119876 119878
119878119879
119877] (41)
The system matrices 119860 119861 119862 and 119863 of appro-priate dimensions are such that (119860 119862) is observableand (119860[119861 119876
12] ) is controllable Assume that a data set
119906(119905119894) 119910(119905
119894) 119894[1119873] of sampled inputoutput data obtained
from (41) is available Then the problem is to provide aconsistent estimate of the state space matrices 119860 119861 119862 and119863 on the basis of the available data
Note that both model order and the tuning parameters ofthe identification algorithm (ie the position of the Laguerrepole a and the parameters of the PBSIDopt algorithm) needto be achieved at the head of the procedure herein a cross-validation approach explained in detail in the literature [77]is used to address the issue
As can be observed from the experiments in which theinput signal adopted for identification experiments is the so-called 3211 piecewise constant sequence the identifiedmodelscapture the essential features of the response of the quadrotoralong all the axes As it is known that the SMI method israpid and easy to use however the model deserved from thealgorithm is not based on some kind of optimal criteria sothe model obtained is also not believed to be optimum
625 UKF Method As we know if the systems have severenonlinearities EKF can be hard to tune and often givesunreliable estimation due to the linearization relied by theEKF in order to propagate the mean and covariance of thestates Therefore UKF is applied for the identification of aquadrotor model [88]
For the quadrotor system with continuous-time systemdynamics
= 119860119909 + 119861119906
119910 = 119862119909
(42)
Since the state vector of the quad-rotor
119909119896= (119909 119910 119911 119910 120601 120579 120595 120601 120579 )
119879 (43)
the system state equation can be derived according to thefull nonlinear equations Finally based on all of the systemequations the parameters to be estimated and identified areformulated as follows
Θ = (119868119909119909 119868119910119910 119868119911119911 119868119877 119910 120601 120579 )
119879
(44)
12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Abstract and Applied Analysis
Based the experiments the error of the estimation forvelocity at 119909-axes is less than 0001 while the errors at both 119910-axes and 119911-axes are less than 00015 For estimation of angularvelocities at 119909 119910 and 119911-axes the errors are less than 00015From the errors computed it can be concluded that the UKFoutput matches with the measured output and the measurednoise is well filtered by theUKF It has good convergence timeand relatively reliable for the estimations
63 Slate-Grey Models RBF-ARX Model The RBF-ARXmodel is a nonlinear time-varying model whose structureresembles the ARX model Its independent variables aregroups of signals indicating the nonlinear status of thesystem and itsmodel parameters can be promptly adjusted tothe best by taking the advantages of the RBF neural networkOwing to the self-adjusting parameters the RBF-ARXmodelnot only has an outstanding approximation in local linearspace but also has superior global performance RBF-ARXbasic model structure of a quadrotor is shown as follows[89 90]
119910 (119905) = 119888 (120596 (119905)) +
119899119910
sum
119896=1
119860119896 (120596 (119905)) 119884 (119905 minus 119896)
+
119899119906
sum
119896=119889
119861119896 (120596 (119905)) 119880 (119905 minus 119896) + 119890 (119905)
119862 (120596 (119905)) = [1206011
0(120596 (119905)) 120601
2
0(120596 (119905)) 120601
3
0(120596 (119905))]
119879
120601119894
0(120596 (119905)) = 119888
1
0+
ℎ
sum
119898=1
119888119894
119898exp minus
1003817100381710038171003817120596 (119905) minus 119911119884119898
1003817100381710038171003817
2
120582119903119898
(45)
where 119899119910 119899
119906 119898 and ℎ are the order of the system 119889 is
delay factor of system and 119890(119905) is white noise A quadrotorsystem is a nonlinear system with four inputs and 3 outputsand the inputs are the input electric voltage of four rotorsthat is 119880(119905) = [119881
119891(119905) 119881
119903(119905) 119881
119897(119905) 119881
119887(119905)]
119879 and the threeoutputs are pitch roll and yaw angles respectively that is119884(119905) = [119901(119905) 119903(119905) 119910(119905)]
119879 and 119908(119905) = [119901(119905) 119903(119905)]119879 A set of
simulation tests show that the error of RBF-ARX model ismost close to a normal distribution which indicates that thegood model is obtained In addition no matter how the statevariable 120596(119905) slides the distribution of system pole does notgo beyond the stable scope So the RBF-ARXmodel is suitablefor quadrotor
64 Black Models
641 Neural Network Model A black box model that usesa neural network to learn the dynamics of the quadrotor isattempted [79] The nonlinear autoregressive network withexogenous inputs (NARX) architecture is setup which has 6different nets one each for the119883119884 and119885 velocities and rollpitch and yaw rates The other variables are then integrated(positionangles) and derive (accelerations) from the calcu-lated velocitiesrates The procedure described in Figure 8is designed to address the issue of the current prediction
u
Input normalized
Y
Outputnormalized and added
noise
Trainingneural net in
series-parallel
architecture
Transformationto recurrent
network
Savedneural
net
Figure 8 The flow for training the neural net
(119910119905) dependent on the predicted output for the previous time
point (119910119905minus1
) in which a series-parallel architecture119884(119905minus1) isthe correct output for time point 119905 minus 1 119906(119905) is the input vectorfor time point 119905 and 119910(119905) is the prediction for time point 119905is used for training before converting the net to the parallelarchitecture
Some tests result shows that the black box neural networkmodel can predict both the roll and pitch with very goodaccuracy and however perform not better for the yaw ratewhich will be improved by creating a larger net or by addingmore variables to the state vector for the nets Surprisinglythe model was tested on a manoeuvre for which it had notbeen trained a successful result is obtainedThis result showsthat the black box neural network model learned not onlythe dynamics of the quadrotor but also the dynamics ofthe trends and the noise Neural networks have proved tobe a remarkable modeling scheme carried out in variousapplications however on the other hand substantial amountof tests need to be taken Obviously the work is costly andtime-consuming
642 Data-Based Model The main purpose of data-basedtechniques is to take full advantage of the informationacquired from huge amounts of process measurementsWithout recourse to physical models obtained from firstprinciples a relatively overall perspective of system per-formance could be revealed via available measurementsThrough deep insights of processmeasurements informationlike system characteristics and regularity can be dug out foroptimal modeling and decision making The description [91]aforementioned reveals the insight and application of data-based model identification schemes
It is noted that several typical data-based approacheswhich only depend on process measurements principalcomponent analysis (PCA) partial least squares (PLS) andtheir variants are successfully utilized inmany areas [92ndash96]In the realms of model and control iterative learning control(ILC) scheme and model free adaptive control (MFAC)mdashin essence model free methodsmdashshow great advantageswithout a priori knowledge about the underlying processessuch as time delay and system order despite their potentiallimit for processes with high complexity
In addition the recent developments on model-dataintegrated approaches which also rely on available processmeasurements and a prior known limited knowledge about
Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 13
the processes for monitoring and control purposes the iter-ative feedback tuning (IFT) and virtual reference feedbacktuning (VRFT) have become the promising research topicsAlthough there are no reports of the application of the data-based model identification on the quadrotor so far theseapproaches will soon find their utilizations
Remark Hover condition is the main status of the quadrotoras quite a few tasks such as surveillance search and rescueare implemented in the condition Therefore linear model issimplified on the complex nonlinear one derived from firstprinciple model in which the feasibility is proved by applica-tion result However aggressive maneuver shows the obviousnonlinear characteristics so that the nonlinear model isneeded in which neural networks are an optional schemedespite the fact that a large amount of tests are indispens-able The data-based approaches have shown the distinctiveadvantages in other application areas the utilization on aquadrotor will be a commendable attempt It is noted thatthese methods aforementioned not only are applicable inthe quadrotor aspect but also is helpful to the field with thesimilar characteristics such as active suspension systems ofvehicle investigated in [97 98]
7 Conclusion and Perspective
By now a quadrotor has been a preferable platform ofaircraft design and autonomous control due to the distinctcharacteristics involved in the craft configuration and flightdynamics and the expansion to the commercial and militaryapplication is underway The research results at present showthat the static and dynamic characteristics of a quadrotorhave been developed and the aerodynamic effects on the craftflight performance have been revealed with the help of theconventional rotor theory
As a base and preliminary for the next control andsimulation work the paper surveys the state of art of themodeling and identification of a quadrotor afterwards someopinions are given as follows
(1) The full nonlinear equations have been obtainedby classical Euler-Newtonian mechanics as well asLagrange equation with the knowledge of differentforce imposed on especially aerodynamic functionHowever there is no specific research of the modelof a quadrotor in which the dynamics is describedcomprehensively and systematically
(2) The dynamics of quadrotor shows distinct charac-teristics for the VTOL horizontal flight aggressivemaneuver and hovering mode involved in the exe-cution of flight task Whereas at the present thehoveringmode attracts overmuch attention probablyowing to the fact that the hovering is the one of theimportant working modes Obviously more efforts ofresearch should be paid on the other modes such asaggressive maneuver
(3) The method of multistatic status linearization modelhas been presented at the aim of control whichmay be an effective way to address the issue of
complex dynamics However a problem of undis-turbed switching between the multimodels should beresolved
(4) In contrast with the other crafts there is no moreattention for the model identification of a quadrotorfor the reason of the requirements mentioned in thepaper The effective transplantation of the identifica-tion methods used in the other respects is a practicalchoice
(5) A new configuration of quadrotor with tilt rotor caneliminate the deficiency such as underactuate featureThe relative researchwork has been in progress whichwill be a focus hereafter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Fundamental ResearchFunds for the Central Universities (Grant no FRF-TP-12-005B) Program for New Century Excellent Talents inUniversities (Grant no NCET-11-0578) Aeronautical ScienceFoundation of China (Grant no 2012ZD54013) and Spe-cialized Research Fund for the Doctoral Program of HigherEducation (Grant no 20130006110008)
References
[1] V Martinez Modeling of the flight dynamics of a quadrotorHelicopter [MS thesis] Cranfield University Cranfield UK2007
[2] M Y Amir and V Abbass ldquoModeling of quadrotor helicopterdynamicsrdquo in Proceedings of the International Conference onSmart Manufacturing Application (ICSMA rsquo08) pp 100ndash105Kintex April 2008
[3] GWarwick ldquoUS Army looking at three configuration conceptsfor large cargo rotorcraftrdquo September 2013 httpwwwflightgl-obalcomnewsarticlesus-army-looking-at-three-configurat-ion-concepts-for-large-cargo-rotorcraft-217956
[4] R Mahony V Kumar and P Corke ldquoMultirotor aerial vehiclesmodeling estimation and control of quadrotorrdquo IEEE Roboticsand Automation Magazine vol 19 no 3 pp 20ndash32 2012
[5] R Mahony and V Kumar ldquoAerial robotics and the quadrotorrdquoIEEE Robotics and Automation Magazine vol 19 no 3 p 192012
[6] I Gaponov and A Razinkova ldquoQuadcopter design and imple-mentation as a multidisciplinary engineering courserdquo in Pro-ceedings of the 1st IEEE International Conference on TeachingAssessment and Learning for Engineering (TALE rsquo12) pp B16ndashB19 IEEE Hong Kong China August 2012
[7] N Guenard T Hamel and R Mahony ldquoA practical visual servocontrol for an unmanned aerial vehiclerdquo IEEE Transactions onRobotics vol 24 no 2 pp 331ndash340 2008
[8] S Bouabdallah and R Siegwart ldquoTowards intelligent miniatureflying robotsrdquo in Tractsaction in Advanced Robotics vol 25 pp429ndash440 Springer Berlin Germany 2006
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
14 Abstract and Applied Analysis
[9] G Hoffmann D G Rajnarayan S L Waslander D Dostal JS Jang and C J Tomlin ldquoThe stanford testbed of autonomousrotorcraft for multi agent control (STARMAC)rdquo in Proceedingsof the 23rd Digital Avionics Systems Conference (DASC rsquo04) vol2 pp 12E4ndash12110 Salt Lake City Utah USA October 2004
[10] L Meier P Tanskanen F Fraundorfer and M PollefeysldquoPIXHAWK a system for autonomous flight using onboardcomputer visionrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 2992ndash2997 IEEE Shanghai China May 2011
[11] S K Phang C Cai B M Chen and T H Lee ldquoDesignand mathematical modeling of a 4-standard-propeller (4SP)quadrotorrdquo in Proceeding of the 10th World Congress on Intel-ligent Control and Automation (WCICArsquo12) pp 3270ndash3275Beijing China July 2012
[12] M S Hossain A M Kabir and P Mazumder ldquoDesign anddevelopment of an Y4 Copter control systemrdquo in Proceedingsof the 14th International Conference on Computer Modeling andSimulation (UKSimrsquo12) pp 251ndash256 Cambridge UK March2012
[13] F Senkul and E Altug ldquoModeling and control of a novel tiltroll rotor quadrotor UAVrdquo in Proceeding of the InternationalConference on Unmanned Aircraft Systems (ICUASrsquo13) pp 1071ndash1076 Atlanta Ga USA May 2013
[14] M Ryll H H Bulthoff and P R Giordano ldquoFirst flight testsfor a quadrotor UAV with tilting propellersrdquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo13) pp 295ndash302 IEEE Karlsruhe Germany May 2013
[15] S Driessens and P E I Pounds ldquoTowards a more efficientquadrotor configurationrdquo in Proceedings of the IEEERSJ Inter-national Conference on Intelligent Robots and Systems (IROS rsquo13)pp 1386ndash1392 Tokyo Japan 2013
[16] H Lim J Park D Lee and H J Kim ldquoBuild your ownquadrotor Open-source projects on unmanned aerial vehiclesrdquoIEEE Robotics and Automation Magazine vol 19 no 3 pp 33ndash45 2012
[17] D Mellinger and V Kumar ldquoMinimum snap trajectory gener-ation and control for quadrotorsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRArsquo11) pp 2520ndash2525 IEEE Shanghai China May 2011
[18] Q Zhan J Q Wang and X Xi ldquoControl system designand experiments of a quadrotorrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo12) pp 1152ndash1157 IEEE Guangzhou China December 2012
[19] L Jun and Y T Li ldquoDynamic analysis and PID control fora quadrotorrdquo in Proceedings of the International Conferenceon Mechatronics and Automation pp 573ndash578 IEEE BeijingChina August 2011
[20] A L SalihMMoghavvemiHA FMohamed andK SGaeidldquoFlight PID controller design for a UAV quadrotorrdquo ScientificResearch and Essays vol 5 no 23 pp 3660ndash3667 2010
[21] A B Milhim Y Zhang and C A Rabbath ldquoQuadrotorUAV-high fidelity modeling and nonlinear PID controlrdquo inProceedings of AIAA Modeling and Simulation TechnologiesConference pp 2010ndash8362 Toronto Canada 2010
[22] R Zawiski and M Błachuta ldquoModel development and optimalcontrol of quadrotor aerial robotrdquo in Proceedings of the 17thInternational Conference onMethods andModels in Automationand Robotics (MMAR rsquo12) pp 475ndash480 Miedzyzdrojie PolandAugust 2012
[23] E Reyes-Valeria R Enriquez-Caldera S Camacho-Lara andJ Guichard ldquoLQR control for a quadrotor using unit quater-nions modeling and simulationrdquo in Proceedings of the 23rdInternational Conference on Electronics Communications andComputing (CONIELECOMP rsquo13) pp 172ndash178 IEEE CholulaMexico March 2013
[24] M Rich N Elia and P Jones ldquoDesign and implementation ofan 119867
infincontroller for a quadrotor helicopterrdquo in Proceeding of
the 21st Mediterranean Conference on Control and Automation(MED 13) pp 1189ndash1198 Chania Greece June 2013
[25] P Mukherjee and S L Waslander ldquoDirect adaptive feedbacklinearization for quadrotor controlrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference pp 2012ndash4917Minneapolis Minn USA August 2012
[26] A Khalifa M Fanni A Ramadan and A Abo-Ismail ldquoMod-eling and control of a new quadrotor manipulation systemrdquoin Proceedings of the 1st International Conference on InnovativeEngineering Systems (ICIES rsquo12) pp 109ndash114 Alexandria EgyptDecember 2012
[27] L Pollini and A Metrangolo ldquoSimulation and robust backstep-ping control of a Quadrotor aircraftrdquo in Proceedings to AIAAModeling and Simulation Technologies Conference and Exhibitpp 2008ndash6363 Honolulu Hawaii USA 2008
[28] A AMian andD BWang ldquoModeling and backstepping-basednonlinear control strategy for a 6 DOF quadrotor helicopterrdquoChinese Journal of Aeronautics vol 21 no 3 pp 261ndash268 2008
[29] F CasoloMotion Control InTech Croatia Rijeka 2010[30] M Santos V Lopez and F Morata ldquoIntelligent fuzzy controller
of a quadrotorrdquo in Proceedings of the IEEE International Con-ference on Intelligent Systems and Knowledge Engineering (ISKErsquo10) pp 141ndash146 IEEE Hangzhou China November 2010
[31] C M Korpela T W Danko and P Y Oh ldquoMM-UAV mobilemanipulating unmanned aerial vehiclerdquo Journal of Intelligentand Robotic Systems vol 65 no 1ndash4 pp 93ndash101 2012
[32] D Mellinger N Michael and V Kumar ldquoTrajectory generationand control for precise aggressive maneuversrdquo Springer Tracts-action in Advanced Robotics vol 79 pp 361ndash373 2014
[33] H M Huang G M Hoffmann S L Waslander and C JTomlin ldquoAerodynamics and control of autonomous quadrotorhelicopters in aggressive maneuveringrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo09) pp 3277ndash3282 IEEE Kobe Japan May 2009
[34] N V Hoffer C Coopmans A M Jensen and Y Q Chen ldquoAsurvey and categorization of small low-cost unmanned aerialvehicle system identificationrdquo Journal of Intelligent and RoboticSystems vol 74 no 1-2 pp 129ndash145 2014
[35] S Gupte P I T Mohandas and J M Conrad ldquoA survey ofquadrotor unmanned aerial vehiclesrdquo in Proceeding of the IEEESoutheastcon pp 1ndash6 Orlando Fla USA March 2012
[36] A R Partovi A Z Y Kevin H Lin B M Chen and G CaildquoDevelopment of a cross style quadrotorrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference St PaulMinn USA August 2012
[37] EAltug J POstrowski andRMahony ldquoControl of a quadrotorhelicopter using visual feedbackrdquo in Proceedings of the IEEEInternational Conference on Robotics and Automation pp 72ndash77 IEEE Washington DC USA May 2002
[38] D SMillerOpen loop system identification of a micro quadrotorhelicopter from closed loop data [MS dissertation] University ofMaryland College Park Md USA 2011
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Abstract and Applied Analysis 15
[39] J Dvorak Micro quadrotor-design modeling identification andcontrol [MS thesis] Czech Technical University Prague CzechRepublic 2011
[40] P Pounds R Mahony and P Corke ldquoModelling and control ofa large quadrotor robotrdquo Control Engineering Practice vol 18no 7 pp 691ndash699 2010
[41] J H Kim M-S Kang and S Park ldquoAccurate modelingand robust hovering control for a quad-rotor VTOL aircraftrdquoJournal of Intelligent and Robotic Systems vol 57 no 1ndash4 pp9ndash26 2010
[42] M Elsamanty A Khalifa M Fanni A Ramadan and AAbo-Ismail ldquoMethodology for identifying quadrotor param-eters attitude estimation and controlrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo13) pp 1343ndash1348 Wollongong AustraliaJuly 2013
[43] J Kim M-S Kang and S Park ldquoAccurate modeling and robusthovering control for a quad-rotor VTOL aircraftrdquo Journal ofIntelligent and Robotic Systems vol 57 no 1ndash4 pp 9ndash26 2010
[44] T BrescianiModelling identification and control of a quadrotorHelicopter [MS thesis] Lund University Lund Sweden 2008
[45] H J Wang ldquoThe essence of dynamic mechanics for lagrangeequationrdquo Journal of Hebei University of Science and Technologyvol 24 no 2 pp 56ndash60 2003 (Chinese)
[46] P Castillo R Lozano and A Dzul ldquoStabilization of a mini-rotorcraft having four rotorsrdquo in Proceedings of the IEEERSJInternational Conference on Intelligent Robots and Systems(IROS rsquo04) pp 2693ndash2698 Sendal Japan October 2004
[47] RW BeardQuadrotor Dynamics and Control rsquoBrighamYoungUniversity 2008
[48] P McKerrow ldquoModelling the draganflyer four-rotor helicopterrdquoin Proceedings of the IEEE International Conference on Roboticsand Automation pp 3596ndash3601 New Orleans La USA May2004
[49] M D L C de Oliveira Modeling Identification and Control ofa Quadrotor Aircraft [MS thesis] Czech Technical UniversityPrague Czech Republic 2011
[50] S Bouabdallah P Murrieri and R Siegwart ldquoDesign andcontrol of an indoormicro quadrotorrdquo in Proceeding of the 2004IEEE International Conference on Robotics and Automation(ICRA 04) vol 5 pp 4393ndash4398 May 2004
[51] A Benallegue A Mokhtari and L Fridman ldquoFeedback lin-earization and high order slidingmode observer for a quadrotorUAVrdquo in Proceedings of the International Workshop on VariableStructure Systems (VSS rsquo06) pp 365ndash372 Alghero Italy June2006
[52] S Bouabdallah and R Siegwart ldquoFull control of a quadrotorrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo07) pp 153ndash158 SanDiego Calif USA November 2007
[53] C A Herda Implementation of a quadrotor unmanned arialvehicle [MS dissertation] California State University LosAngeles Calif USA 2012
[54] J M B Domingues Quadrotor prototype [M S dissertation]Instituto Superior Tecnico Gottingen Germany 2009
[55] A Tayebi and S McGilvray ldquoAttitude stabilization of a VTOLquadrotor aircraftrdquo IEEE Transactions on Control Systems Tech-nology vol 14 no 3 pp 562ndash571 2006
[56] N A Chaturvedi A K Sanyal and N HMcClamroch ldquoRigid-body attitude controlrdquo IEEE Control Systems Magazine vol 31no 3 pp 30ndash51 2011
[57] VMistler A Benallegue andNKMrsquoSirdi ldquoExact linearizationand noninteracting control of a 4 rotors helicopter via dynamicfeedbackrdquo in Proceedings of the 10th IEEE International Work-shop on Robot and Human Communication pp 586ndash593 ParisFrance September 2001
[58] J P How B Bethke A Frank D Dale and J Vian ldquoReal-timeindoor autonomous vehicle test environmentrdquo IEEE ControlSystems Magazine vol 28 no 2 pp 51ndash64 2008
[59] M J Stepaniak A quadrotor sensor platform [PhD disserta-tion] Ohio University Athens Ohio USA 2008
[60] A Nanjangud ldquoSimultaneous low-order control of a nonlinearquadrotor model at four equilibriardquo in Proceedings of the IEEEConference on Decision and Control pp 2914ndash2919 FlorenceItaly December 2013
[61] R K Agarwal Recent Advances in Aircraft Technology InTechRijeka Croatia 2012
[62] G M Hoffmann H M Huang S L Waslander and C JTomlin ldquoQuadrotor helicoper flight dynamics and control-theory and experimentrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference and Exhibit p 6461 HiltonHead SC USA 2007
[63] P Pounds R Mahony J Gresham P Corke and J RobertsldquoTowards dynamically favourable quad-rotor aerial robotsrdquo inProceedings of the Australasian Conference on Robotics andAutomation Canberra Australia December 2004
[64] G M Hoffmann S L Waslander and C J Tomlin ldquoQuadro-tor helicopter trajectory tracking controlrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[65] G M Hoffmann H Huang S L Waslander and C J TomlinldquoPrecision flight control for a multi-vehicle quadrotor heli-copter testbedrdquo Control Engineering Practice vol 19 no 9 pp1023ndash1036 2011
[66] P Pounds R Mahony and P Corke ldquoModelling and control ofa quadRotor robotrdquo in Proceedings to International Conferenceon Robotics and Automation Auckland New Zealand 2006
[67] R W Prouty Helicopter Performance Stability and ControlKrieger Melbourne Fla USA 1995
[68] J Seddon Basic Helicopter Aerodynamics BSP London UK1990
[69] J G Leishman Principles of Helicopter Aerodynamics Cam-bridge University Press London UK 2nd edition 2006
[70] R Zawiski and M Błachuta ldquoDynamics and optimal control ofquadrotor platformrdquo in Proceedings of the AIAAGuidance Nav-igation and Control Conference AIAA 2012-4915 MinneapolisMinn USA August 2012
[71] S Bouabdallah Design and control of quadrotors with applica-tion to autonomous flying [MS thesis] Universite Abou BekrBelkaid Tlemcen Tlemcen Algeria 2007
[72] C Powers D Mellinger and A Kushleyev ldquoInfluence ofaerodynamics and proximity effects in quadrotor flightrdquo inProceedings of the International Symposium on ExperimentalRobotics pp 17ndash21 Quebec Canada 2012
[73] N Guenard T Hamel and L Eck ldquoControl laws for the teleoperation of an unmanned aerial vehicle known as an X4-flyerrdquo in Proceeding of the IEEERSJ International Conferenceon Intelligent Robots and Systems (IROSrsquo06) pp 3249ndash3254Beijing China October 2006
[74] W Johnson Helicopter Theory Dover New York NY USA1980
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
16 Abstract and Applied Analysis
[75] L Ljung ldquoPerspectives on system identificationrdquo Journal ofIntelligent and Robotic Systems no 74 pp 129ndash145 2014
[76] M Gevers ldquoA personal view of the development of systemidentificationrdquo IEEE Control Systems Magazine vol 26 no 6pp 93ndash105 2006
[77] M Bergamasco ldquoIdentification of linear models for the dynam-ics of a hovering quadrotorrdquo IEEE Transactions on ControlSystems Technology vol 22 no 5 pp 1696ndash1707 2014
[78] L K Burkamshaw Towards a low-cost quadrotor researchplatform [MS thesis] Naval Postgraduate School MontereyCalif USA 2010
[79] D Sonntag A study of quadrotor modeling [M S dissertation]Linkopings Universitet Linkoping Sweden 2011
[80] L Derafa T Madani and A Benallegue ldquoDynamic modellingand experimental identification of four rotors helicopter param-etersrdquo in Proceedings of the IEEE International Conference onIndustrial Technology (ICIT rsquo06) pp 1834ndash1839 Mumbai IndiaDecember 2006
[81] P Pounds R Mahony and P Corke ldquoSystem identificationand control of an aerobot drive systemrdquo in Proceedings of theInformation Decision and Control Conference (IDC rsquo07) pp154ndash159 Adelaide Australia February 2007
[82] S Bouabdallah P Murrieri and R Siegwart ldquoTowardsautonomous indoor micro VTOLrdquo Autonomous Robots vol 18no 2 pp 171ndash183 2005
[83] Y Naidoo R Stopforth and G Bright ldquoQuad-rotor unmannedaerial vehicle helicopter modeling and controlrdquo InternationalJournal of Advanced Robotic Systems vol 8 no 4 pp 139ndash1492011
[84] L Derafa T Madani and A Benallegue ldquoDynamic mod-elling and experimental identification of four rotors helicopterparametersrdquo in Proceedings of the IEEE International Conferenceon Industrial Technology (ICIT rsquo06) pp 1834ndash1839 December2006
[85] O Falkenberg JWitt U Pilz UWeltin andHWerner ldquoModelidentification and 119867
infincontrol for MAVrsquosrdquo in Proceedings of
the International Conference on Intelligent Robotics and Appli-cations pp 460ndash471 Montreal Canada 2012
[86] G Gremillion ldquoSystem identification of a quadrotor microair vehiclerdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference p 7644 Toronto Canada 2010
[87] W Wei ldquoFrequency-domain system identification and simu-lation of a quadrotor controllerrdquo in Proceedings of the AIAAModeling and Simulation Technologies Conference pp 1834ndash1839 National Harbor Maryland Md USA 2014
[88] N Abas A Legowo and R Akmeliawati ldquoParameter identifi-cation of an autonomous quadrotorrdquo in Proceeding of the 4thInternational Conference on Mechatronics (ICOM 11) pp 1ndash8Kuala Lumpur Malaysia May 2011
[89] L L Liu Research on the modeling and control to a quadrotorhelicopter simulator [MS thesis] Central South UniversityChangsha China 2009
[90] Q L Luo Application of RBF-ARX model-based predictivecontrol on quad-rotor helicopter simulator [M S dissertation]Central South University Changsha China 2012 (Chinese)
[91] S Yin X W Li H J Gao and O Kaynak ldquoData-basedtechniques focused on modern industry an overviewrdquo IEEETransactions on Industrial Electronics no 99 pp 1ndash11 2014
[92] S Yin S X Ding X C Xie andH Luo ldquoA review on basic data-driven approaches for industrial process monitoringrdquo IEEETransactions on Industrial Electronics vol 61 no 11 pp 6418ndash6428 2014
[93] S Yin S X Ding A Haghani H Hao and P Zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[94] S Yin G Wang and H R Karimi ldquoData-driven design ofrobust fault detection system for wind turbinesrdquo Journal ofMechatronics vol 24 no 4 pp 298ndash306 2014
[95] S Yin S X Ding A H A Sari and H Hao ldquoData-drivenmonitoring for stochastic systems and its application on batchprocessrdquo International Journal of Systems Science vol 44 no 7pp 1366ndash1376 2013
[96] S Yin H Luo and S X Ding ldquoReal-time implementation offault-tolerant control systems with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
[97] W C Sun H J Gao and O Kaynak ldquoAdaptive backsteppingcontrol for active suspension systems with hard constraintsrdquoIEEE Transactions onMechatronics vol 18 no 3 pp 1072ndash10792013
[98] W C Sun Z L Zhao and H J Gao ldquoSaturated adaptive robustcontrol for active suspension systemsrdquo IEEE Transactions onIndustrial Electronics vol 60 no 9 pp 3889ndash3896 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of




























