Embed Size (px)
Citation preview

Results of the University Robotics Software Study
Eddie Tunstel, Task Managerand
Gene Chalfant
Jet Propulsion [email protected]
(818) 393-2666 (voice)(818) 354-8172 (fax)
WITS
CLARAty
ROAMS
UniversityRobotics
?
Mars Technology ProgramRegional Mobility and Subsurface Access
Presented to CLARAty Development Team, November 6, 2003
University S/W Study Results, Nov. 2003
EWT-2
• Study approach and external interfaces• “Market” surveys and highlighted results• Influence of survey outcomes• Software dissemination and roadmap• Recommendations and conclusions
Mobility Systems Concept Development Section
Outline

University S/W Study Results, Nov. 2003
EWT-3
Task Manager: Edward Tunstel, JPL, (818)393-2666, [email protected]
Participating Organizations:• Jet Propulsion Laboratory• NASA Ames Research Center • CLARAty Development Team
University Robotics Software Distribution Study
Task Schedule and FY03 Funding
Objective:Conduct a study to investigate the feasibility and process for providing NASA MTP robotics research software as a single package to a wide distribution of universities in the future.
FY03 Milestone:Develop and present a roadmap for distribution of a bundled software package, including CLARAty, ROAMS and WITS, to the university robotics
research community.
WITS
CLARAty
ROAMS
UniversityRobotics
?
NASA procedures
University surveys
Develop roadmap
S/W & H/Wrequirements
FY03 Funding: $ 70 K
Q1 Q2 Q3 Q4
Task Completed August 2003

University S/W Study Results, Nov. 2003
EWT-4
Mobility Systems Concept Development Section
Study Approach
CLARAty forUniversities Survey
University RoboticsSurvey
Current regulations and prior successes
SoftwareDissemination
ROADMAP
Related task interactions(CLARAty, WITS, ROAMS, etc)
University S/W Study Results, Nov. 2003
EWT-5
Mobility Systems Concept Development Section
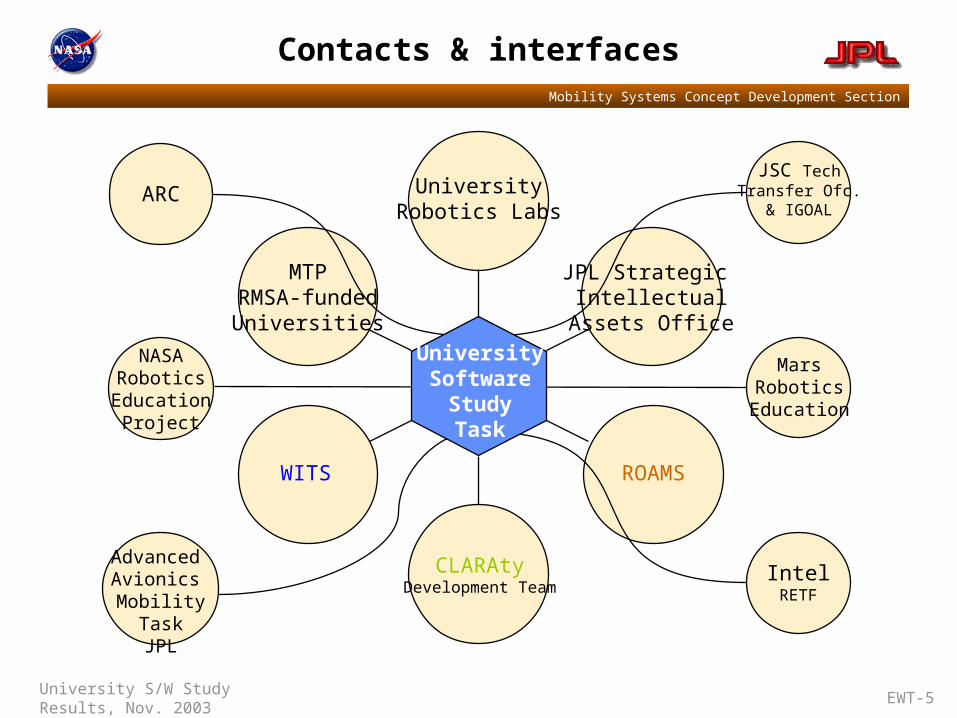
Contacts & interfaces
UniversityRobotics Labs
MTPRMSA-funded
Universities
JPL Strategic Intellectual
Assets Office
WITS ROAMS
UniversitySoftware
StudyTask
IntelRETF
Advanced Avionics
Mobility TaskJPL
MarsRoboticsEducation
NASARoboticsEducation
Project
JSC TechTransfer Ofc.
& IGOALARC
CLARAtyDevelopment Team
University S/W Study Results, Nov. 2003
EWT-6
• Solicited CLARAty developers and users to take a survey aimed at sampling collective opinions and suggestions regarding university distribution of CLARAty.
• Launched survey at CLARAty Workshop, January 13-14, 2003
• Survey results provided focal points for our interactions with universities and influenced the direction of the study.
Mobility Systems Concept Development Section
CLARAty for Universities Survey

University S/W Study Results, Nov. 2003
EWT-7
• Received 23 survey responses out of 46 solicited (52% of respondents are both developers and users of CLARAty)
• Major highlights (areas of most consensus)– For a bundled robotics development kit, a simulation environment, user
interface, and robot hardware are all important components — simulator most important, h/w least important
– A COTS mobile robot is most recommended hardware complement for a kit (as opposed to component-based motion control kits)
– The most essential items needed to sufficiently support university users are documentation and training materials.
– Open Source distribution is commonly suggested.
• Survey results to be included in full in Final Report (also available at http://robotics.jpl.nasa.gov/people/tunstel/CLARAty_survey.html)
Mobility Systems Concept Development Section
CLARAty Survey Results Summary

University S/W Study Results, Nov. 2003
EWT-8
• Formulated a second survey (conducted April 10-30, 2003) for U.S. university robotics researchers.
• 20 questions targeted at a sampling of faculty and student researchers to identify their robotics software and hardware tool use/preferences as well as research focus
• Formulation of survey aided by constructive feedback from MTP management and CLARAty Task Manager
Mobility Systems Concept Development Section
University Robotics Survey

University S/W Study Results, Nov. 2003
EWT-9
2
1
13
9
2
2
1
31
4
2
6
1 5
2
3
1 6
1
5
111
11
1
1
3
3
3
• 86 labs at 61 US universities in 30 states nationwide with diverse research thrusts including mobile robotics, manipulation, computer vision, AI, multi-agents, learning, man-machine interfaces, manufacturing, biorobotics, etc
Mobility Systems Concept Development Section
University Robotics Survey: solicitation

University S/W Study Results, Nov. 2003
EWT-10
• The following colleges and universities responded to the survey:Arkansas Arkansas Tech Brown Bryn Mawr
Cal Poly Pomona Clark Atlanta CMU Drexel
Florida State Florida A&M Harvey Mudd Hawaii
Idaho Johns Hopkins UMass Michigan
Minnesota Missouri Nebraska New Hampshire
New Mexico Notre Dame Oklahoma Rice
San Diego State Stanford South Florida Swarthmore
Tennessee USC Utah Utah State
Vanderbilt Villanova Washington Wisconsin
Mobility Systems Concept Development Section
University Robotics Survey: response
63 total responses during April 10-30
University Robotics Survey Response
0
5
10
15
20
25
30
Faculty Researcher Lab Director Grad Student Undergrad Student
Primary Laboratory Roles
Number of Respondents
University S/W Study Results, Nov. 2003
EWT-11
• Survey provided a variety of useful feedback on current software and hardware use, preferences, and demand for software features offered by CLARAty, WITS, and ROAMS
– software tools and preferences for university robotics research
– preferred types of user/technical support from NASA
– preferred robot hardware complements and most commonly used robotic systems
– level of interest in NASA robotics software
Mobility Systems Concept Development Section
University Robotics Survey: outcomes
University S/W Study Results, Nov. 2003
EWT-12
Languages, OS, and user support
• Most commonly used languages: C++ (84%), C (73%), and Java (40%)
• Most common operating systems: MS Windows (66%) and Linux (63%)
• Desired user support in order of importance is documentation, forums/ newsgroups, phone/e-mail, bug tracking
Preferred software features and libraries• Survey reveals a high demand for simulation software and the ability to
model own COTS/custom robots• Users require flexible, customizable code - they want to use “only what
they need” from a suite of generic software such as CLARAty• Open Source is very important to university robotics software developers• Among the planned set of CLARAty software libraries, vision and
navigation libraries are in highest demand.
Mobility Systems Concept Development Section
University robotics software use & preferences

University S/W Study Results, Nov. 2003
EWT-13
• Established collective system requirements for hosting a bundled package• Envisioned usage configurations
1) workstation to host the full s/w bundle2) onboard computer to host CLARAty
• High-end workstation with (preferably) 2 monitors and graphics hardware support recommended for configuration #1
• Robot with interface for onboard-laptop, or embedded robot computer with resources sufficient to host CLARAty recommended for configuration #2
Mobility Systems Concept Development Section
MTP Software Bundle Usage Configuration
WITS
CLARAty
ROAMS
( ( ) )
CLARAty
( ( ) )
WITS
CLARAty
ROAMS
University Robot Hardware
University Robot
Hardware
#1 #2
University S/W Study Results, Nov. 2003
EWT-14
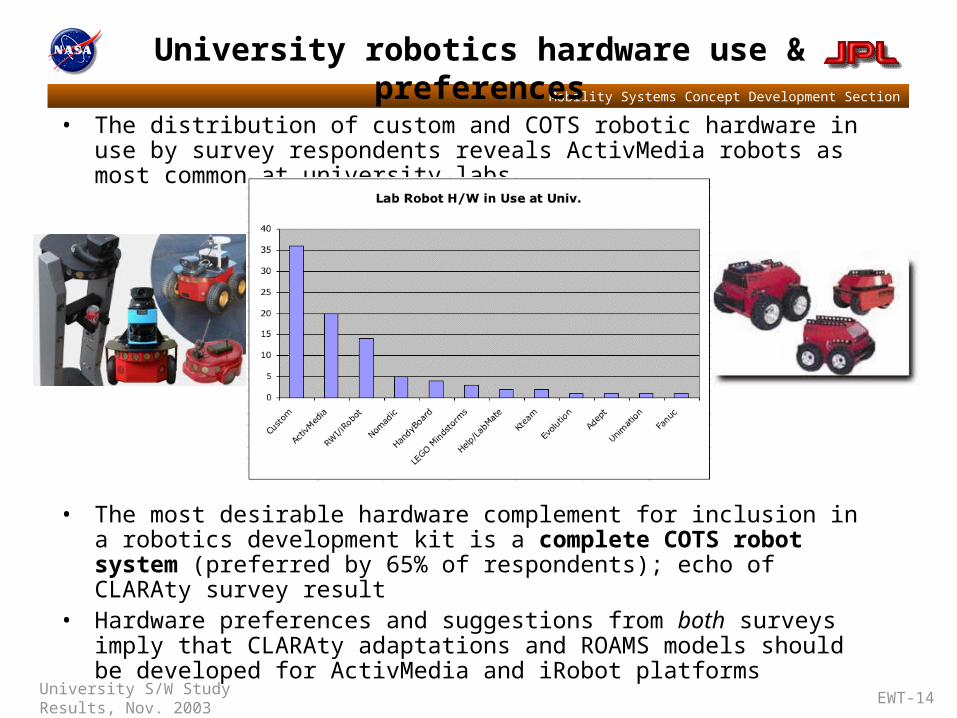
• The distribution of custom and COTS robotic hardware in use by survey respondents reveals ActivMedia robots as most common at university labs
• The most desirable hardware complement for inclusion in a robotics development kit is a complete COTS robot system (preferred by 65% of respondents); echo of CLARAty survey result
• Hardware preferences and suggestions from both surveys imply that CLARAty adaptations and ROAMS models should be developed for ActivMedia and iRobot platforms
Mobility Systems Concept Development Section
University robotics hardware use & preferences
University S/W Study Results, Nov. 2003
EWT-15
• 90% of respondents expressed interest in using NASA-developed robotics software (CLARAty, WITS, ROAMS)
• 73% would favor using NASA-developed software products to complement or replace their existing tools
• 98% willing to share software modules they develop with NASA and a larger user community
• 77% indicated interest in receiving the survey results
• Overall, the survey results indicate that there is sufficient general interest in NASA robotics software products; this is motivated primarily by the prospect of NASA funding and/or collaborations, as well as low cost to universities.
Complete university robotics survey results provided to Dr. Issa Nesnas.
Mobility Systems Concept Development Section
Interest in MTP robotics software

University S/W Study Results, Nov. 2003
EWT-16
Mobility Systems Concept Development Section
MTP Robotics Software Dissemination

University S/W Study Results, Nov. 2003
EWT-17
• Investigated process used by NASA JSC (10+ years ago) for successful external distribution of its Enigma Software Tools
• Software was developed jointly by civil servants at the IGOAL lab and contractors at Muniz Engineering, Inc. (MEI) in Houston, TX
• Findings:
• Some aspects of the JSC process could be emulated for the MTP software; others do not apply.
Mobility Systems Concept Development Section
IGOAL Enigma Software Tools
• Limited distribution
• Initially, executable and libraries only
• Usage limited to:– govt. agencies and their contractors
– universities/companies with grant/ contract
– others via purchase from COSMIC.
• ITAR assessment resulted in provision of a software utilization agreement requiring clauses to be added to code headers.
• Rights later granted by JSC to MEI• MEI now markets it commercially.

University S/W Study Results, Nov. 2003
EWT-18
• In a nutshell, the following facts pertain to the process currently applicable to MTP software dissemination
• Wide dissemination of JPL developed software is done through the Open Channel Foundation– an independent organization; not NASA-funded, unlike COSMIC, the
former software clearing house used by NASA.
– http://www.openchannelfoundation.org
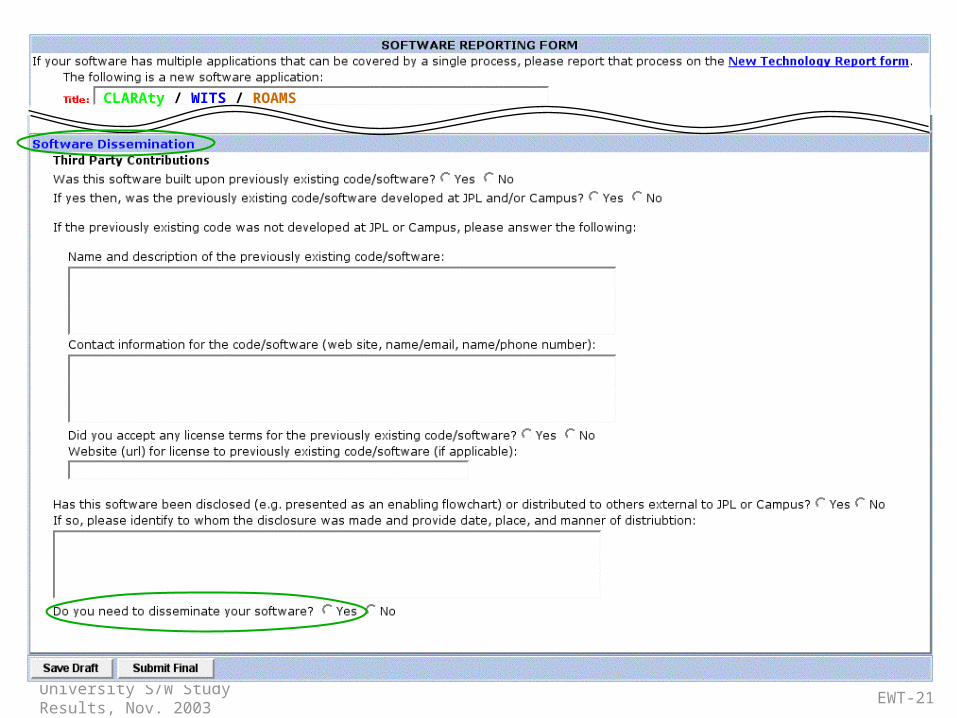
• A request to disseminate software is indicated on NTR form
• Strategic Intellectual Assets Management Office handles the interface with the Caltech Office of Technology Transfer and the Office of the General Counsel.
Mobility Systems Concept Development Section
Release of JPL-Developed Software
University S/W Study Results, Nov. 2003
EWT-19
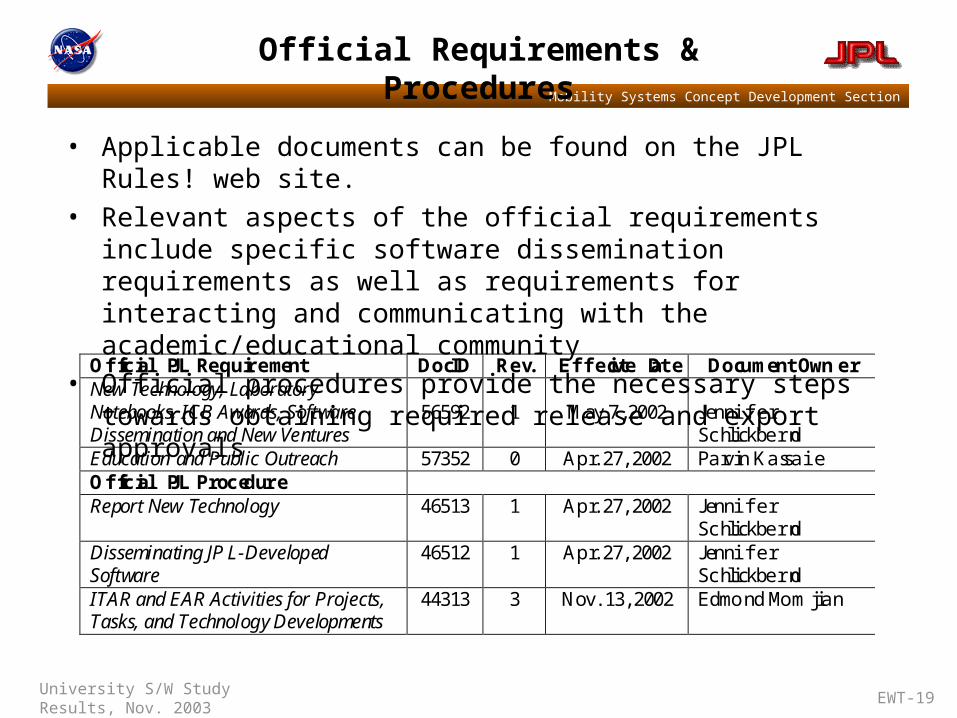
• Applicable documents can be found on the JPL Rules! web site.
• Relevant aspects of the official requirements include specific software dissemination requirements as well as requirements for interacting and communicating with the academic/educational community
• Official procedures provide the necessary steps towards obtaining required release and export approvals
Mobility Systems Concept Development Section
Official Requirements & Procedures
Official JPL Requirement DocID Rev. Effective Date Document OwnerNew Technology, LaboratoryNotebooks, ICB Awards, SoftwareDissemination and New Ventures
56592 1 May 7, 2002 JenniferSchlickbernd
Education and Public Outreach 57352 0 Apr. 27, 2002 Parvin KassaieOfficial JPL ProcedureReport New Technology 46513 1 Apr. 27, 2002 Jennifer
SchlickberndDisseminating JPL-DevelopedSoftware
46512 1 Apr. 27, 2002 JenniferSchlickbernd
ITAR and EAR Activities for Projects,Tasks, and Technology Developments
44313 3 Nov. 13, 2002 Edmond Momjian
University S/W Study Results, Nov. 2003
EWT-20
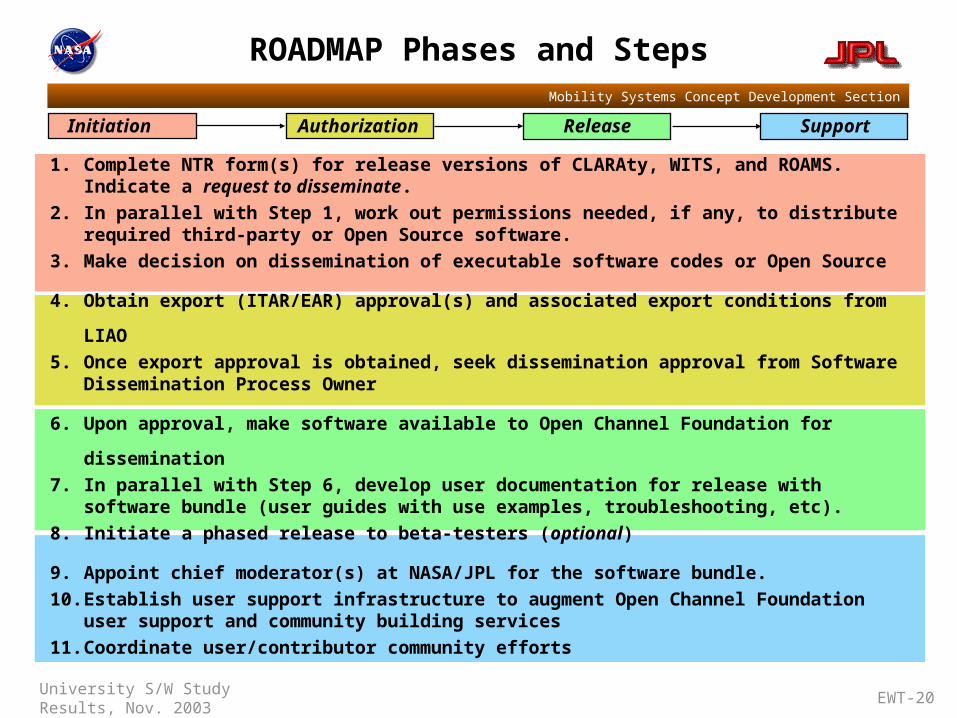
Initiation Authorization Release Support
Mobility Systems Concept Development Section
ROADMAP Phases and Steps
1. Complete NTR form(s) for release versions of CLARAty, WITS, and ROAMS. Indicate a request to disseminate.
2. In parallel with Step 1, work out permissions needed, if any, to distribute required third-party or Open Source software.
3. Make decision on dissemination of executable software codes or Open Source
4. Obtain export (ITAR/EAR) approval(s) and associated export conditions from LIAO
5. Once export approval is obtained, seek dissemination approval from Software Dissemination Process Owner
6. Upon approval, make software available to Open Channel Foundation for dissemination
7. In parallel with Step 6, develop user documentation for release with software bundle (user guides with use examples, troubleshooting, etc).
8. Initiate a phased release to beta-testers (optional)
9. Appoint chief moderator(s) at NASA/JPL for the software bundle.
10. Establish user support infrastructure to augment Open Channel Foundation user support and community building services
11. Coordinate user/contributor community efforts
University S/W Study Results, Nov. 2003
EWT-21
CLARAty / WITS / ROAMS

University S/W Study Results, Nov. 2003
EWT-22
Mobility Systems Concept Development Section
ROADMAP
• NTR with dissemination request • Executable / Source?
Disseminationvia Open Channel
Foundation
User/Contributor Community
Coordination
Export approval (ITAR/EAR)
Release Approval(S/W Dissem.
Process Owner)
• Export conditions• License(s)
Build community moderation
infrastructure
Phased Software Release
(beta test)
3rd-party s/w distribution permissions
Documentationto accompany
release
Appoint Chief User Community
Moderator
Initiation Authorization Release Support

University S/W Study Results, Nov. 2003
EWT-23
• Consider disseminating MTP robotics software as Open Source
• Develop CLARAty adaptations and ROAMS models for ActivMedia and iRobot platforms
• If a hardware complement is included with software dissemination, opt for a COTS robot or an otherwise complete robot system
• Consider reopening the University Robotics Survey for a longer period to improve sampling
Mobility Systems Concept Development Section
Recommendations

University S/W Study Results, Nov. 2003
EWT-24
• The University Robotics Survey results have established that an unmet demand exists at universities for robotics software with features offered by CLARAty, WITS, and ROAMS .
• Typical Host computing platforms used by university robotics researchers can host a CLARAty, WITS, and ROAMS software bundle.
• It is feasible to undertake the task of disseminating MTP software to universities as desired by the Program
• The desired software dissemination can be achieved in compliance with the applicable institutional regulations by following the roadmap presented.
Mobility Systems Concept Development Section
Conclusions