Embed Size (px)
Citation preview

Research ArticleRestoring Force Model of an Energy-Dissipation Joint in HybridFrames Simplified Skeleton Curve and Hysteretic Rules
Yanhua Wang 1 Yan Feng1 Dongsheng Huang2 Zirui Huang1 and Zhongfan Chen1
1Key Laboratory of RC amp PC Structures of Ministry of Education Southeast University Nanjing 210096 China2National Engineering Research Center of Biomaterials Nanjing Forestry University Nanjing 210037 China
Correspondence should be addressed to Yanhua Wang wyh00737seueducn
Received 29 September 2019 Accepted 24 April 2020 Published 28 May 2020
Academic Editor Giuseppe Quaranta
Copyright copy 2020 YanhuaWang et alis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In this paper a restoring force model composed of a trilinear skeleton curve and hysteretic rules is proposed based on ninepseudostatic tests of the energy-dissipation joint under horizontal low cyclic loading e critical points of the simplified skeletoncurve are obtained via theoretical derivation and FE simulation e hysteretic rules for the joints are simplified as a concavehexagon where the parameters of the critical points are optimized by the genetic algorithm (GA) Using the established trilinearskeleton curve three different working stages ie elastic hardening and softening were divided by the critical points and themoment stiffness of three stages can be calculated e proposed hysteretic rules of each stage can reveal and explain theldquopinchingrdquo in the cyclic loading which make it easier to understand the mechanism of the energy-dissipation joint ecomparison between the restoring force model and the tests shows that the simplified skeleton curves the established hystereticrules and the ductility and the damping ratio are consistent with the experimental results Finally the effectiveness of theestablished restoring force model is verified
1 Introduction
In the past few decades engineered bamboo products (EBPs)have emerged as alternatives to traditional building mate-rials because of their advantages such as energy saving andenvironmental friendliness [1 2] As the manufacturingtechnology is getting increasingly mature the promotion ofapplication of wood and bamboo materials in mid- andhigh-rise buildings has caught great attention of researchersworldwide [3ndash8]
However compared with concrete and steel there aresome inherent limitations of EBPs when used as perpen-dicular bearing components ie the accumulated creep andrequirement for a larger size To overcome the issuesmentioned above a hybrid frame made up of steel columnsand engineered bamboo beams is proposed as an effectivesolution [9 10] Obviously the connection between the steelcolumn and engineered bamboo beam becomes an essentialaspect of steel-engineered bamboo frame
Studies on variable parameters have been conducted toexplore the appropriate design methods of the joint as areliable connection e dowel and bolt are the mostcommonly used joints in modern wood or EBP buildingswhose ductility is achieved by means of the plastic defor-mation in metallic connectors [11ndash15] Conversely in heavyportal frames the energy-dissipation capacity of the con-nections turns out to be relatively low because of the limitednumber of joints To improve the hysteretic performance oftimber or EBP connections some new joints or reinforce-ment methods were proposed An innovative posttensionedbeam-column timber joint which turned out to be of goodstructural performances has been developed and studied bymany researchers [16 17] Other reinforcement methodssuch as gluing wood-based panels on each side of the shearplanes by orienting unidirectional fibers perpendicular tothe grain and inserting a box-type steel bracket betweentimber beam and column [10 18ndash27] were tested andsatisfactory results were obtained
HindawiAdvances in Civil EngineeringVolume 2020 Article ID 7806381 18 pageshttpsdoiorg10115520207806381
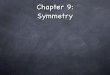
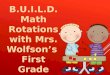
Among these studies Huang et al [28] proposed asemirigid joint made up of a steel hinge and a pair of top andseat brackets to carry the shear force and moment from theend of the beam as shown in Figure 1 In this setup the jointcan serve as a frame connection and an energy-dissipationdevice Low cyclic loading experiments for nine joints wereconducted in Nanjing Forest University and the resultsrevealed that the joint provided sufficient strength andstiffness to satisfy the requirements of serviceability dem-onstrating a satisfactory energy-dissipation capacity With aproper design the ductility ratio and damping ratio of theconnections can reach more than 30 and 30 respectivelyHuang et al [28] also suggested a formula to predict theload-carrying capacity of the proposed semirigid joint to-gether with a design method to fully display its load-carryingcapacity and ductility e research results and theoreticalderivation verified the pronounced advantages of the joint inconnecting the steel-engineered bamboo hybrid framewhich requires further study to investigate its restoringcharacteristics
e cyclic restoring force model is an useful tool forperforming seismic analysis of energy-dissipation joints inmid- and high-rise buildings [29 30] Based on the hysteresisloops and skeleton curves of energy-dissipation joints asimplified trilinear skeleton curve is constructed where thecharacteristic values can be obtained via the load-carryingcapacity formula and theoretic derivation e hystereticrules of a single loop have a reversed S-shape which can bemodeled by a concave hexagon In this paper the charac-teristic values of the concave hexagon are optimized by thegenetic algorithm
2 Brief Introduction of the Test
e schematic picture of the energy-dissipation joint is il-lustrated in Figure 1 e base panel and the stub wereconnected through a 20mm dimeter bolt e PSB panelswere mounted on the two sides of steel stub of the con-nection respectively through 12 bolts of 22mm in dimetere middle parts of the two energy-dissipation plates (EDPsin the following) were welded on the stub symmetricallywhile one end was weld on the base panel
e details of the test connections (ie the diameter andspacing of the bolts the sizes of the base panel and stub)were designed with a suitable over strength In this way thebolt connection is stronger than the EDPs and the tensionand compression forces lead to the yielding or buckling ofthe EDPs that dissipated energy when exerted earthquake orreversed loading eoretically the dimension of thebrackets is one of the major factors impacting on the me-chanical behavior of the connection
According to the purpose of the energy-dissipation jointdesign [28] the width-to-thickness ratio of the energy-dissipation plate should be greater than 15 to ensure thatthere is only minimal shear under seismic loading Pre-simulations in ABAQUS with variable widths thicknessesand cross sections were carried out to study the effect of thebuckling stress of the plate which showed that the length-to-thickness ratio was a major and reliable factor to explore the
hysteretic behaviors of energy-dissipation plate (see Section412) erefore a group of tests were performed to explorethe effect of the length-to-thickness ratio on the moment-carrying capacity of the energy-dissipation joint by changingthicknesses with identical cross section and length eparameters of the tests are presented in Table 1 where l is thelength of EDP b is the width of EDP and t is the thickness ofEDP
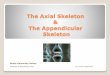
All specimens were loaded under a lateral cyclic forcewithout axial pressure For the convenience of loading thespecimens were rotated 90 degrees compared to their actualservice position in the steel-engineered bamboo frame [28]Using the setup presented in Figure 2(b) the engineeredbamboo beam could be idealized as a cantilever beam that isfixed at the steel column and free at the other end elengths of the beam and column were 2m and 12m to avoidsignificant influence on the connection [31] Hence a similarbending moment to that in an actual steel-engineeredbamboo hybrid frame was exerted on the specimens eadvantages of the setup also include the convenience forcalculation and installment
Preloading was conducted to check if all the bolt-jointswere properly mounted and worked well and then unloadingthe actuator to zero to reset the acquisition system Load wascontrolled by the movement of actuator at the speed of4mmmin before the EDP yielding and of 02 Δmmminafter the first yielding of the EDP where Δ represents the topdisplacement of first yielding in the EDP ree cycles werecarried out for each loading grade after the first yieldingoccurred [32 33] e loading-unloading regime is illus-trated in Figure 2(c)
3 Analysis of the Experimental Results
According to the nine experimental results the failuremodes can be categorized into two different types as pre-sented in Table 2
Since the joint is designed to dissipate earthquake energyby the EDPs the fatigue strength of the weld in failure modeII dominates the load-carrying capacity of the joint and theEDPs are too thick to fully display their energy-dissipationability According to design suggestions in [28] the length-to-thickness ratio should be limited in the range of 9 to 16Only the first 4 tests in Table 1 meet the requirement Besidesthat there are only two working stages in the skeleton curvesof the last 5 tests due to the experimental setupsrsquo limitsSince the analytical model is intended to reveal the wholeworking stages only the results of the first four groups inTable 1 were used for evaluating these coefficients
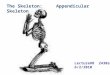
As summarized from the hysteresis loops and skeletoncurves in [28] a typical skeleton curve can be divided intothree stages as presented in Figure 3 e characteristics ofthe three working stages are included in Table 3
e initial stiffness and moment-carrying capacity of thejoint were also presented by Huang et al [28] so that thestiffness in the elastic stage (I) and the maximummoment ofthe joint can be calculated However when structures un-dergo strong lateral forces (ie earthquakes and wind) theenergy is dissipated by joints when the elastic stage is
2 Advances in Civil Engineering
Energy-dissipation plate (EDP)
(a)
b
l
t
(b)
Hinge
Energy dissipation plate Stub
Base panel
(c)
Figure 1 Energy-dissipation joint for hybrid frames (a) schematic picture (b) details of EDP (c) details of the connection
Table 1 Parameters of the tests
Specimen Length of EDP (mm) Width of EDP (mm) ickness of EDP (mm) Length-to-thickness ratioJ-6-1 80 100 6 133J-8-1 J-8-2 J-8-3 80 75 8 10J-10-1 J-10-2 J-10-3 80 60 10 8J-12-1 J-12-2 80 50 12 667
(a)
Engineeredbamboo beam
Applying cyclic lateralload by an actuator
Steelcolumn
D1
D2D3D5
D4
(b)
Figure 2 Continued
Advances in Civil Engineering 3
3 cycle aer∆y
Disp
lace
men
t (
of ∆
y)
1 cycle before∆y
ndash150
ndash100
ndash50
0
50
100
150
2 4 6 8 10 12 14 16 18 200Cycle number
(c)
Figure 2 e energy-dissipation joint tests details of the experimental specimen (a) schematic picture (b) loading regime of the test (c)
Table 2 e experimental results of the energy-dissipation joint
Specimen ickness of EDP (mm) Failure mode Failure position Failure characteristics [28]J-6-1 6
I e middle of the EDP after bucklingJ-8-1 J-8-2 J-8-3 8
J-10-1 J-10-2 J-10-3 10
II e weld of the EDP-to-base panelJ-12-1 J-12-2 12
II III I
I II III
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
Figure 3 A typical skeleton curve of the energy-dissipation joint test
4 Advances in Civil Engineering
exceeded erefore the restoring force model including thenonlinear behavior of the joint should be studied
e restoring force characteristics can be represented bya simplified skeleton curve and the hysteretic rules emethod to construct the restoring force model based on theexperimental results (ie the skeleton curve and hysteresisloops) is explained as following (1) by simplifying thenonlinear segments (hardening and softening segments)into straight lines with constant slope the experimentalskeleton curve can be transferred as a trilinear curve with sixcritical points (2) the hysteretic rules can be simplified as ahexagon concluded from every single loop where themaximum points can be obtained from the simplifiedskeleton curve and the other critical points need to be de-termined with GA
Using the established trilinear skeleton curve threedifferent working stages namely elastic hardening andsoftening were identified and defined by the critical pointsand themoment stiffness relationship of the three stageseproposed hysteretic rules of each stages reveal and explainthe ldquopinchingrdquo in the cyclic loading which make it easier tounderstand the mechanism of the energy-dissipation joint
4 Restoring Force Model of the Energy-Dissipation Joint
Based on the analysis of the nine pseudostatic tests of theenergy-dissipation joint and the extended FE simulation thecritical points of the energy-dissipation joint with differentsizes can be calculatede restoring force model of this typejoint is constructed where the model parameters obtainedcan work for other connections of the same type
41 Simplified Trilinear Skeleton Curve A typical skeletoncurve of the energy-dissipation joint in the steel-engineeredbamboo hybrid frame is presented in Figure 3 which hasthree segments a straight line a hardening segment with acontinuously changing stiffness and a softening stage with aslight decline after the peak load
ere are two critical points after the yielding ie thepeak point and the ultimate point e comparison of thenegative and positive values (absolute moments and rota-tions) of the two critical points is presented in Table 4 whichshows that the errors of the two absolute moments androtations are less than 5 within the acceptable range Butthe size relationship of the two values cannot be determinedin designing since the EDP yields in an uncertain side firstTo solve the problem and ensure the design redundancy the
minimummoments and rotations of the two absolute valueswere selected to represent the peakultimate moment androtation in positive and negative directions
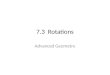
In this paper a symmetric trilinear simplified skeletoncurve is selected to relatively match with the experimentalskeleton curve In Figure 4 points Y P and U refer to theyield point peak point and ultimate point of the jointrespectively erefore six key values of the simplified tri-linear skeleton curve should be determined based on theexperimental skeleton curves My and θy represent themoment and rotation of Point Y respectively Mp and θp arethe moment and rotation of Point P respectively Mu and θu
are the moment and rotation of Point U respectively K1K2 and K3 are the moment stiffness values of each segmentbelonging to the simplified skeleton curve of the energy-dissipation joint
411 Rotations of the Skeleton Curve e yield point whichis also called the soft point refers to the critical state wherethe load and displacement curves at the end of the beambegin to deviate from the linear variation [34] Combinedwith the test phenomenon the yield point should be con-sidered as the mutation point where the slope of the skeletoncurve begins to change and the point where the EDP beginsto buckle
e initial yielding is the point when the stress of EDPreaches the yield strength of steel fy us the tensile orcompressive force in EDP must be FEDP fybt when initialyielding takes place from the deformation of energy-dis-sipation joint in the elastic stage presented in Figure 5 theinitial yield moment can be calculated by
ME FEDP(h + t) fybt(h + t) (1)
e initial moment stiffness of the connection can becalculated by KE fybt(h + t)θE where θE represents therotation of connection which can be calculated by equation(2) as follows
θE fy
E(h + t)2l
2fyl
E(h + t) (2)
KE Ebt(h + t)2
2l (3)
where E represents Youngrsquos module of the steel b and t arethe width and the thickness of EDP respectively l representsthe length of EDP and h stands for the clear distance be-tween the two EDPs
Table 3 ree working stages of a typical skeleton curve
Workingstages M minus θ relationship Working status of
EDP Working characteristics [28]
I Linear Elastic No damage of each components
II Nonlinear curve Buckling By increasing the displacement or load the strain exceeds its elastic limit andthe EDP of the joint begins to buckle
III A segment with negativestiffness Failure At the end of stage (II) the higher the displacement the lower the load until
the failure of the joint occurs
Advances in Civil Engineering 5
e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

Among these studies Huang et al [28] proposed asemirigid joint made up of a steel hinge and a pair of top andseat brackets to carry the shear force and moment from theend of the beam as shown in Figure 1 In this setup the jointcan serve as a frame connection and an energy-dissipationdevice Low cyclic loading experiments for nine joints wereconducted in Nanjing Forest University and the resultsrevealed that the joint provided sufficient strength andstiffness to satisfy the requirements of serviceability dem-onstrating a satisfactory energy-dissipation capacity With aproper design the ductility ratio and damping ratio of theconnections can reach more than 30 and 30 respectivelyHuang et al [28] also suggested a formula to predict theload-carrying capacity of the proposed semirigid joint to-gether with a design method to fully display its load-carryingcapacity and ductility e research results and theoreticalderivation verified the pronounced advantages of the joint inconnecting the steel-engineered bamboo hybrid framewhich requires further study to investigate its restoringcharacteristics
e cyclic restoring force model is an useful tool forperforming seismic analysis of energy-dissipation joints inmid- and high-rise buildings [29 30] Based on the hysteresisloops and skeleton curves of energy-dissipation joints asimplified trilinear skeleton curve is constructed where thecharacteristic values can be obtained via the load-carryingcapacity formula and theoretic derivation e hystereticrules of a single loop have a reversed S-shape which can bemodeled by a concave hexagon In this paper the charac-teristic values of the concave hexagon are optimized by thegenetic algorithm
2 Brief Introduction of the Test
e schematic picture of the energy-dissipation joint is il-lustrated in Figure 1 e base panel and the stub wereconnected through a 20mm dimeter bolt e PSB panelswere mounted on the two sides of steel stub of the con-nection respectively through 12 bolts of 22mm in dimetere middle parts of the two energy-dissipation plates (EDPsin the following) were welded on the stub symmetricallywhile one end was weld on the base panel
e details of the test connections (ie the diameter andspacing of the bolts the sizes of the base panel and stub)were designed with a suitable over strength In this way thebolt connection is stronger than the EDPs and the tensionand compression forces lead to the yielding or buckling ofthe EDPs that dissipated energy when exerted earthquake orreversed loading eoretically the dimension of thebrackets is one of the major factors impacting on the me-chanical behavior of the connection
According to the purpose of the energy-dissipation jointdesign [28] the width-to-thickness ratio of the energy-dissipation plate should be greater than 15 to ensure thatthere is only minimal shear under seismic loading Pre-simulations in ABAQUS with variable widths thicknessesand cross sections were carried out to study the effect of thebuckling stress of the plate which showed that the length-to-thickness ratio was a major and reliable factor to explore the
hysteretic behaviors of energy-dissipation plate (see Section412) erefore a group of tests were performed to explorethe effect of the length-to-thickness ratio on the moment-carrying capacity of the energy-dissipation joint by changingthicknesses with identical cross section and length eparameters of the tests are presented in Table 1 where l is thelength of EDP b is the width of EDP and t is the thickness ofEDP
All specimens were loaded under a lateral cyclic forcewithout axial pressure For the convenience of loading thespecimens were rotated 90 degrees compared to their actualservice position in the steel-engineered bamboo frame [28]Using the setup presented in Figure 2(b) the engineeredbamboo beam could be idealized as a cantilever beam that isfixed at the steel column and free at the other end elengths of the beam and column were 2m and 12m to avoidsignificant influence on the connection [31] Hence a similarbending moment to that in an actual steel-engineeredbamboo hybrid frame was exerted on the specimens eadvantages of the setup also include the convenience forcalculation and installment
Preloading was conducted to check if all the bolt-jointswere properly mounted and worked well and then unloadingthe actuator to zero to reset the acquisition system Load wascontrolled by the movement of actuator at the speed of4mmmin before the EDP yielding and of 02 Δmmminafter the first yielding of the EDP where Δ represents the topdisplacement of first yielding in the EDP ree cycles werecarried out for each loading grade after the first yieldingoccurred [32 33] e loading-unloading regime is illus-trated in Figure 2(c)
3 Analysis of the Experimental Results
According to the nine experimental results the failuremodes can be categorized into two different types as pre-sented in Table 2
Since the joint is designed to dissipate earthquake energyby the EDPs the fatigue strength of the weld in failure modeII dominates the load-carrying capacity of the joint and theEDPs are too thick to fully display their energy-dissipationability According to design suggestions in [28] the length-to-thickness ratio should be limited in the range of 9 to 16Only the first 4 tests in Table 1 meet the requirement Besidesthat there are only two working stages in the skeleton curvesof the last 5 tests due to the experimental setupsrsquo limitsSince the analytical model is intended to reveal the wholeworking stages only the results of the first four groups inTable 1 were used for evaluating these coefficients
As summarized from the hysteresis loops and skeletoncurves in [28] a typical skeleton curve can be divided intothree stages as presented in Figure 3 e characteristics ofthe three working stages are included in Table 3
e initial stiffness and moment-carrying capacity of thejoint were also presented by Huang et al [28] so that thestiffness in the elastic stage (I) and the maximummoment ofthe joint can be calculated However when structures un-dergo strong lateral forces (ie earthquakes and wind) theenergy is dissipated by joints when the elastic stage is
2 Advances in Civil Engineering
Energy-dissipation plate (EDP)
(a)
b
l
t
(b)
Hinge
Energy dissipation plate Stub
Base panel
(c)
Figure 1 Energy-dissipation joint for hybrid frames (a) schematic picture (b) details of EDP (c) details of the connection
Table 1 Parameters of the tests
Specimen Length of EDP (mm) Width of EDP (mm) ickness of EDP (mm) Length-to-thickness ratioJ-6-1 80 100 6 133J-8-1 J-8-2 J-8-3 80 75 8 10J-10-1 J-10-2 J-10-3 80 60 10 8J-12-1 J-12-2 80 50 12 667
(a)
Engineeredbamboo beam
Applying cyclic lateralload by an actuator
Steelcolumn
D1
D2D3D5
D4
(b)
Figure 2 Continued
Advances in Civil Engineering 3
3 cycle aer∆y
Disp
lace
men
t (
of ∆
y)
1 cycle before∆y
ndash150
ndash100
ndash50
0
50
100
150
2 4 6 8 10 12 14 16 18 200Cycle number
(c)
Figure 2 e energy-dissipation joint tests details of the experimental specimen (a) schematic picture (b) loading regime of the test (c)
Table 2 e experimental results of the energy-dissipation joint
Specimen ickness of EDP (mm) Failure mode Failure position Failure characteristics [28]J-6-1 6
I e middle of the EDP after bucklingJ-8-1 J-8-2 J-8-3 8
J-10-1 J-10-2 J-10-3 10
II e weld of the EDP-to-base panelJ-12-1 J-12-2 12
II III I
I II III
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
Figure 3 A typical skeleton curve of the energy-dissipation joint test
4 Advances in Civil Engineering
exceeded erefore the restoring force model including thenonlinear behavior of the joint should be studied
e restoring force characteristics can be represented bya simplified skeleton curve and the hysteretic rules emethod to construct the restoring force model based on theexperimental results (ie the skeleton curve and hysteresisloops) is explained as following (1) by simplifying thenonlinear segments (hardening and softening segments)into straight lines with constant slope the experimentalskeleton curve can be transferred as a trilinear curve with sixcritical points (2) the hysteretic rules can be simplified as ahexagon concluded from every single loop where themaximum points can be obtained from the simplifiedskeleton curve and the other critical points need to be de-termined with GA
Using the established trilinear skeleton curve threedifferent working stages namely elastic hardening andsoftening were identified and defined by the critical pointsand themoment stiffness relationship of the three stageseproposed hysteretic rules of each stages reveal and explainthe ldquopinchingrdquo in the cyclic loading which make it easier tounderstand the mechanism of the energy-dissipation joint
4 Restoring Force Model of the Energy-Dissipation Joint
Based on the analysis of the nine pseudostatic tests of theenergy-dissipation joint and the extended FE simulation thecritical points of the energy-dissipation joint with differentsizes can be calculatede restoring force model of this typejoint is constructed where the model parameters obtainedcan work for other connections of the same type
41 Simplified Trilinear Skeleton Curve A typical skeletoncurve of the energy-dissipation joint in the steel-engineeredbamboo hybrid frame is presented in Figure 3 which hasthree segments a straight line a hardening segment with acontinuously changing stiffness and a softening stage with aslight decline after the peak load
ere are two critical points after the yielding ie thepeak point and the ultimate point e comparison of thenegative and positive values (absolute moments and rota-tions) of the two critical points is presented in Table 4 whichshows that the errors of the two absolute moments androtations are less than 5 within the acceptable range Butthe size relationship of the two values cannot be determinedin designing since the EDP yields in an uncertain side firstTo solve the problem and ensure the design redundancy the
minimummoments and rotations of the two absolute valueswere selected to represent the peakultimate moment androtation in positive and negative directions
In this paper a symmetric trilinear simplified skeletoncurve is selected to relatively match with the experimentalskeleton curve In Figure 4 points Y P and U refer to theyield point peak point and ultimate point of the jointrespectively erefore six key values of the simplified tri-linear skeleton curve should be determined based on theexperimental skeleton curves My and θy represent themoment and rotation of Point Y respectively Mp and θp arethe moment and rotation of Point P respectively Mu and θu
are the moment and rotation of Point U respectively K1K2 and K3 are the moment stiffness values of each segmentbelonging to the simplified skeleton curve of the energy-dissipation joint
411 Rotations of the Skeleton Curve e yield point whichis also called the soft point refers to the critical state wherethe load and displacement curves at the end of the beambegin to deviate from the linear variation [34] Combinedwith the test phenomenon the yield point should be con-sidered as the mutation point where the slope of the skeletoncurve begins to change and the point where the EDP beginsto buckle
e initial yielding is the point when the stress of EDPreaches the yield strength of steel fy us the tensile orcompressive force in EDP must be FEDP fybt when initialyielding takes place from the deformation of energy-dis-sipation joint in the elastic stage presented in Figure 5 theinitial yield moment can be calculated by
ME FEDP(h + t) fybt(h + t) (1)
e initial moment stiffness of the connection can becalculated by KE fybt(h + t)θE where θE represents therotation of connection which can be calculated by equation(2) as follows
θE fy
E(h + t)2l
2fyl
E(h + t) (2)
KE Ebt(h + t)2
2l (3)
where E represents Youngrsquos module of the steel b and t arethe width and the thickness of EDP respectively l representsthe length of EDP and h stands for the clear distance be-tween the two EDPs
Table 3 ree working stages of a typical skeleton curve
Workingstages M minus θ relationship Working status of
EDP Working characteristics [28]
I Linear Elastic No damage of each components
II Nonlinear curve Buckling By increasing the displacement or load the strain exceeds its elastic limit andthe EDP of the joint begins to buckle
III A segment with negativestiffness Failure At the end of stage (II) the higher the displacement the lower the load until
the failure of the joint occurs
Advances in Civil Engineering 5
e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

Energy-dissipation plate (EDP)
(a)
b
l
t
(b)
Hinge
Energy dissipation plate Stub
Base panel
(c)
Figure 1 Energy-dissipation joint for hybrid frames (a) schematic picture (b) details of EDP (c) details of the connection
Table 1 Parameters of the tests
Specimen Length of EDP (mm) Width of EDP (mm) ickness of EDP (mm) Length-to-thickness ratioJ-6-1 80 100 6 133J-8-1 J-8-2 J-8-3 80 75 8 10J-10-1 J-10-2 J-10-3 80 60 10 8J-12-1 J-12-2 80 50 12 667
(a)
Engineeredbamboo beam
Applying cyclic lateralload by an actuator
Steelcolumn
D1
D2D3D5
D4
(b)
Figure 2 Continued
Advances in Civil Engineering 3
3 cycle aer∆y
Disp
lace
men
t (
of ∆
y)
1 cycle before∆y
ndash150
ndash100
ndash50
0
50
100
150
2 4 6 8 10 12 14 16 18 200Cycle number
(c)
Figure 2 e energy-dissipation joint tests details of the experimental specimen (a) schematic picture (b) loading regime of the test (c)
Table 2 e experimental results of the energy-dissipation joint
Specimen ickness of EDP (mm) Failure mode Failure position Failure characteristics [28]J-6-1 6
I e middle of the EDP after bucklingJ-8-1 J-8-2 J-8-3 8
J-10-1 J-10-2 J-10-3 10
II e weld of the EDP-to-base panelJ-12-1 J-12-2 12
II III I
I II III
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
Figure 3 A typical skeleton curve of the energy-dissipation joint test
4 Advances in Civil Engineering
exceeded erefore the restoring force model including thenonlinear behavior of the joint should be studied
e restoring force characteristics can be represented bya simplified skeleton curve and the hysteretic rules emethod to construct the restoring force model based on theexperimental results (ie the skeleton curve and hysteresisloops) is explained as following (1) by simplifying thenonlinear segments (hardening and softening segments)into straight lines with constant slope the experimentalskeleton curve can be transferred as a trilinear curve with sixcritical points (2) the hysteretic rules can be simplified as ahexagon concluded from every single loop where themaximum points can be obtained from the simplifiedskeleton curve and the other critical points need to be de-termined with GA
Using the established trilinear skeleton curve threedifferent working stages namely elastic hardening andsoftening were identified and defined by the critical pointsand themoment stiffness relationship of the three stageseproposed hysteretic rules of each stages reveal and explainthe ldquopinchingrdquo in the cyclic loading which make it easier tounderstand the mechanism of the energy-dissipation joint
4 Restoring Force Model of the Energy-Dissipation Joint
Based on the analysis of the nine pseudostatic tests of theenergy-dissipation joint and the extended FE simulation thecritical points of the energy-dissipation joint with differentsizes can be calculatede restoring force model of this typejoint is constructed where the model parameters obtainedcan work for other connections of the same type
41 Simplified Trilinear Skeleton Curve A typical skeletoncurve of the energy-dissipation joint in the steel-engineeredbamboo hybrid frame is presented in Figure 3 which hasthree segments a straight line a hardening segment with acontinuously changing stiffness and a softening stage with aslight decline after the peak load
ere are two critical points after the yielding ie thepeak point and the ultimate point e comparison of thenegative and positive values (absolute moments and rota-tions) of the two critical points is presented in Table 4 whichshows that the errors of the two absolute moments androtations are less than 5 within the acceptable range Butthe size relationship of the two values cannot be determinedin designing since the EDP yields in an uncertain side firstTo solve the problem and ensure the design redundancy the
minimummoments and rotations of the two absolute valueswere selected to represent the peakultimate moment androtation in positive and negative directions
In this paper a symmetric trilinear simplified skeletoncurve is selected to relatively match with the experimentalskeleton curve In Figure 4 points Y P and U refer to theyield point peak point and ultimate point of the jointrespectively erefore six key values of the simplified tri-linear skeleton curve should be determined based on theexperimental skeleton curves My and θy represent themoment and rotation of Point Y respectively Mp and θp arethe moment and rotation of Point P respectively Mu and θu
are the moment and rotation of Point U respectively K1K2 and K3 are the moment stiffness values of each segmentbelonging to the simplified skeleton curve of the energy-dissipation joint
411 Rotations of the Skeleton Curve e yield point whichis also called the soft point refers to the critical state wherethe load and displacement curves at the end of the beambegin to deviate from the linear variation [34] Combinedwith the test phenomenon the yield point should be con-sidered as the mutation point where the slope of the skeletoncurve begins to change and the point where the EDP beginsto buckle
e initial yielding is the point when the stress of EDPreaches the yield strength of steel fy us the tensile orcompressive force in EDP must be FEDP fybt when initialyielding takes place from the deformation of energy-dis-sipation joint in the elastic stage presented in Figure 5 theinitial yield moment can be calculated by
ME FEDP(h + t) fybt(h + t) (1)
e initial moment stiffness of the connection can becalculated by KE fybt(h + t)θE where θE represents therotation of connection which can be calculated by equation(2) as follows
θE fy
E(h + t)2l
2fyl
E(h + t) (2)
KE Ebt(h + t)2
2l (3)
where E represents Youngrsquos module of the steel b and t arethe width and the thickness of EDP respectively l representsthe length of EDP and h stands for the clear distance be-tween the two EDPs
Table 3 ree working stages of a typical skeleton curve
Workingstages M minus θ relationship Working status of
EDP Working characteristics [28]
I Linear Elastic No damage of each components
II Nonlinear curve Buckling By increasing the displacement or load the strain exceeds its elastic limit andthe EDP of the joint begins to buckle
III A segment with negativestiffness Failure At the end of stage (II) the higher the displacement the lower the load until
the failure of the joint occurs
Advances in Civil Engineering 5
e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

3 cycle aer∆y
Disp
lace
men
t (
of ∆
y)
1 cycle before∆y
ndash150
ndash100
ndash50
0
50
100
150
2 4 6 8 10 12 14 16 18 200Cycle number
(c)
Figure 2 e energy-dissipation joint tests details of the experimental specimen (a) schematic picture (b) loading regime of the test (c)
Table 2 e experimental results of the energy-dissipation joint
Specimen ickness of EDP (mm) Failure mode Failure position Failure characteristics [28]J-6-1 6
I e middle of the EDP after bucklingJ-8-1 J-8-2 J-8-3 8
J-10-1 J-10-2 J-10-3 10
II e weld of the EDP-to-base panelJ-12-1 J-12-2 12
II III I
I II III
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
Figure 3 A typical skeleton curve of the energy-dissipation joint test
4 Advances in Civil Engineering
exceeded erefore the restoring force model including thenonlinear behavior of the joint should be studied
e restoring force characteristics can be represented bya simplified skeleton curve and the hysteretic rules emethod to construct the restoring force model based on theexperimental results (ie the skeleton curve and hysteresisloops) is explained as following (1) by simplifying thenonlinear segments (hardening and softening segments)into straight lines with constant slope the experimentalskeleton curve can be transferred as a trilinear curve with sixcritical points (2) the hysteretic rules can be simplified as ahexagon concluded from every single loop where themaximum points can be obtained from the simplifiedskeleton curve and the other critical points need to be de-termined with GA
Using the established trilinear skeleton curve threedifferent working stages namely elastic hardening andsoftening were identified and defined by the critical pointsand themoment stiffness relationship of the three stageseproposed hysteretic rules of each stages reveal and explainthe ldquopinchingrdquo in the cyclic loading which make it easier tounderstand the mechanism of the energy-dissipation joint
4 Restoring Force Model of the Energy-Dissipation Joint
Based on the analysis of the nine pseudostatic tests of theenergy-dissipation joint and the extended FE simulation thecritical points of the energy-dissipation joint with differentsizes can be calculatede restoring force model of this typejoint is constructed where the model parameters obtainedcan work for other connections of the same type
41 Simplified Trilinear Skeleton Curve A typical skeletoncurve of the energy-dissipation joint in the steel-engineeredbamboo hybrid frame is presented in Figure 3 which hasthree segments a straight line a hardening segment with acontinuously changing stiffness and a softening stage with aslight decline after the peak load
ere are two critical points after the yielding ie thepeak point and the ultimate point e comparison of thenegative and positive values (absolute moments and rota-tions) of the two critical points is presented in Table 4 whichshows that the errors of the two absolute moments androtations are less than 5 within the acceptable range Butthe size relationship of the two values cannot be determinedin designing since the EDP yields in an uncertain side firstTo solve the problem and ensure the design redundancy the
minimummoments and rotations of the two absolute valueswere selected to represent the peakultimate moment androtation in positive and negative directions
In this paper a symmetric trilinear simplified skeletoncurve is selected to relatively match with the experimentalskeleton curve In Figure 4 points Y P and U refer to theyield point peak point and ultimate point of the jointrespectively erefore six key values of the simplified tri-linear skeleton curve should be determined based on theexperimental skeleton curves My and θy represent themoment and rotation of Point Y respectively Mp and θp arethe moment and rotation of Point P respectively Mu and θu
are the moment and rotation of Point U respectively K1K2 and K3 are the moment stiffness values of each segmentbelonging to the simplified skeleton curve of the energy-dissipation joint
411 Rotations of the Skeleton Curve e yield point whichis also called the soft point refers to the critical state wherethe load and displacement curves at the end of the beambegin to deviate from the linear variation [34] Combinedwith the test phenomenon the yield point should be con-sidered as the mutation point where the slope of the skeletoncurve begins to change and the point where the EDP beginsto buckle
e initial yielding is the point when the stress of EDPreaches the yield strength of steel fy us the tensile orcompressive force in EDP must be FEDP fybt when initialyielding takes place from the deformation of energy-dis-sipation joint in the elastic stage presented in Figure 5 theinitial yield moment can be calculated by
ME FEDP(h + t) fybt(h + t) (1)
e initial moment stiffness of the connection can becalculated by KE fybt(h + t)θE where θE represents therotation of connection which can be calculated by equation(2) as follows
θE fy
E(h + t)2l
2fyl
E(h + t) (2)
KE Ebt(h + t)2
2l (3)
where E represents Youngrsquos module of the steel b and t arethe width and the thickness of EDP respectively l representsthe length of EDP and h stands for the clear distance be-tween the two EDPs
Table 3 ree working stages of a typical skeleton curve
Workingstages M minus θ relationship Working status of
EDP Working characteristics [28]
I Linear Elastic No damage of each components
II Nonlinear curve Buckling By increasing the displacement or load the strain exceeds its elastic limit andthe EDP of the joint begins to buckle
III A segment with negativestiffness Failure At the end of stage (II) the higher the displacement the lower the load until
the failure of the joint occurs
Advances in Civil Engineering 5
e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

exceeded erefore the restoring force model including thenonlinear behavior of the joint should be studied
e restoring force characteristics can be represented bya simplified skeleton curve and the hysteretic rules emethod to construct the restoring force model based on theexperimental results (ie the skeleton curve and hysteresisloops) is explained as following (1) by simplifying thenonlinear segments (hardening and softening segments)into straight lines with constant slope the experimentalskeleton curve can be transferred as a trilinear curve with sixcritical points (2) the hysteretic rules can be simplified as ahexagon concluded from every single loop where themaximum points can be obtained from the simplifiedskeleton curve and the other critical points need to be de-termined with GA
Using the established trilinear skeleton curve threedifferent working stages namely elastic hardening andsoftening were identified and defined by the critical pointsand themoment stiffness relationship of the three stageseproposed hysteretic rules of each stages reveal and explainthe ldquopinchingrdquo in the cyclic loading which make it easier tounderstand the mechanism of the energy-dissipation joint
4 Restoring Force Model of the Energy-Dissipation Joint
Based on the analysis of the nine pseudostatic tests of theenergy-dissipation joint and the extended FE simulation thecritical points of the energy-dissipation joint with differentsizes can be calculatede restoring force model of this typejoint is constructed where the model parameters obtainedcan work for other connections of the same type
41 Simplified Trilinear Skeleton Curve A typical skeletoncurve of the energy-dissipation joint in the steel-engineeredbamboo hybrid frame is presented in Figure 3 which hasthree segments a straight line a hardening segment with acontinuously changing stiffness and a softening stage with aslight decline after the peak load
ere are two critical points after the yielding ie thepeak point and the ultimate point e comparison of thenegative and positive values (absolute moments and rota-tions) of the two critical points is presented in Table 4 whichshows that the errors of the two absolute moments androtations are less than 5 within the acceptable range Butthe size relationship of the two values cannot be determinedin designing since the EDP yields in an uncertain side firstTo solve the problem and ensure the design redundancy the
minimummoments and rotations of the two absolute valueswere selected to represent the peakultimate moment androtation in positive and negative directions
In this paper a symmetric trilinear simplified skeletoncurve is selected to relatively match with the experimentalskeleton curve In Figure 4 points Y P and U refer to theyield point peak point and ultimate point of the jointrespectively erefore six key values of the simplified tri-linear skeleton curve should be determined based on theexperimental skeleton curves My and θy represent themoment and rotation of Point Y respectively Mp and θp arethe moment and rotation of Point P respectively Mu and θu
are the moment and rotation of Point U respectively K1K2 and K3 are the moment stiffness values of each segmentbelonging to the simplified skeleton curve of the energy-dissipation joint
411 Rotations of the Skeleton Curve e yield point whichis also called the soft point refers to the critical state wherethe load and displacement curves at the end of the beambegin to deviate from the linear variation [34] Combinedwith the test phenomenon the yield point should be con-sidered as the mutation point where the slope of the skeletoncurve begins to change and the point where the EDP beginsto buckle
e initial yielding is the point when the stress of EDPreaches the yield strength of steel fy us the tensile orcompressive force in EDP must be FEDP fybt when initialyielding takes place from the deformation of energy-dis-sipation joint in the elastic stage presented in Figure 5 theinitial yield moment can be calculated by
ME FEDP(h + t) fybt(h + t) (1)
e initial moment stiffness of the connection can becalculated by KE fybt(h + t)θE where θE represents therotation of connection which can be calculated by equation(2) as follows
θE fy
E(h + t)2l
2fyl
E(h + t) (2)
KE Ebt(h + t)2
2l (3)
where E represents Youngrsquos module of the steel b and t arethe width and the thickness of EDP respectively l representsthe length of EDP and h stands for the clear distance be-tween the two EDPs
Table 3 ree working stages of a typical skeleton curve
Workingstages M minus θ relationship Working status of
EDP Working characteristics [28]
I Linear Elastic No damage of each components
II Nonlinear curve Buckling By increasing the displacement or load the strain exceeds its elastic limit andthe EDP of the joint begins to buckle
III A segment with negativestiffness Failure At the end of stage (II) the higher the displacement the lower the load until
the failure of the joint occurs
Advances in Civil Engineering 5
e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

e comparison of the experimental and the theoreticalelastic stiffness is presented in Table 5 which shows that theerrors between them are all within 5 erefore KE can beconsidered as the stiffness of stage I
With all the rotations obtained from the tests linearregression algorithm in ORIGIN was selected to describe therelation between each rotation ie yield rotation θy peakrotation θP and ultimate rotation θu with the initial rotationθE respectively e result shows that the relationship be-tween them are all constantsus three coefficients (ie α1α2 and α3) are introduced to obtain them starting from theinitial rotation θE as follows θy α1θE θp α2θE andθu α3θE Table 6 shows the coefficients of rotation in thesimplified trilinear skeleton curve
412 Load-Carrying Capacity and Ultimate States of theJoint e load-carrying capacity is studied considering thefollowing hypotheses (1) the shear of the EDPs and themoment of the hinge can be omitted to ensure that the steelhinge and pair of EDPs can completely carry the shear forceand moment respectively (2) all of the connections betweenthe engineered bamboo beam and the stub steel columnand base panel are considered as rigid connections and (3)the friction of the hinge is ignored
Since the buckling of the EDPs dominates the moment-carrying capacity of the joint it is necessary to explore themechanical behavior of EDPs After getting the maximumreaction force of buckling the peak moment of the energy-dissipation joint can be obtained by FEDP (h+ t) Finite el-ement method (FEM) in ABAQUS was utilized to obtainnumerical simulation of the energy-dissipation plate underaxial loading e plate was divided in two segmentsnamely (1) the real energy-dissipation segment (red part)and (2) the weld segment (blue part) in Figure 6 to betterunderstand the mechanism e boundary conditions wereset the same as for the energy-dissipation joint only the out-of-plane ends movement was constrained e connectionbetween the two segments in ABAQUS was set as ldquotierdquo (akind of constrains) which indicated the rigid connection ofthem e displacementforce was exerted on the referencepoint which was coupled with the top surface of the EDPe established 3D FE model is shown in Figure 6
e element type of C3D8R (8-node linear brick ele-ment reduced integration with hourglass control) inABAQUS was chosen to simulate the large deformation ofthe actual dissipation segment for its better precision andcomputing efficiency while the other components typeC3D20R (20-node linear brick element reduced integration
Table 4 e comparison of maximum and minimum moment and rotation
Specimen J-6 J-8 J-10 J-12Positive peak moment and rotation (kNmiddotmrad) 76810000873 87060001171 88630001226 88180001049Negative peak moment and rotation (kNmiddotmrad) minus 7896minus 0000862 minus 8872-0001150 minus 9009minus 0001215 minus 8579minus 0001059Absolute error () minus 272+126 minus 187+179 minus 162+090 +271minus 095Positive ultimate moment and rotation (kNmiddotmrad) 62050001390 6991000180Negative ultimate moment and rotation (kNmiddotmrad) minus 6317-0001431 minus 7202minus 0001855Absolute error () minus 177minus 287 minus 293minus 296
MpMuMy
ndashMyndashMundashMp
ndashθu ndashθp ndashθy θy θp θu
M (kNm)
θ (rad)
Figure 4 e simplified trilinear skeleton curve proposed in thiswork
M
θ
θ
Hinge
t th
l
Figure 5 e elastic deformation of the energy-dissipation joint
6 Advances in Civil Engineering
with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

with hourglass control) were adopted since there is no needfor large strain and complex damage evolution In the teststhe behavior of EDPs turns out to be in the elastoplasticrange so the whole life stage ie elastic stage hardeningstage and softening stage should be included in the strain-stress relation Figure 7 shows the stress and strain relationof steel Formulas (4) to (8) show the transformation fromnominal to real strain-stress relationship Besides thatnonnegligible damage of the EDPs was observed in theprocess of cyclic loading so the ductile damage criteria waschosen to simulate the evolution of the material damage aspresented in Figure 8
e transformation of the real and nominal strain-stressrelationship of the steel can be explained as follows
considering the incompressibility of the plastic deformationthe volume of the material does not change after largedeformations and the following equations can be obtained
l0A0 lA (4)
A A0l0
l (5)
where l and l0 and A and A0 refer to the initial and final (ieafter large deformations) lengths and cross sections of thetest material
e nominal stress σnom can be calculated as the force F
divided by the initial cross section Substituting A in thecomputation of strain the real stress σrea can be presented as
σrea F
A
F
A0
l
l0 σnom
l
l01113888 1113889 (6)
Table 5 Comparison of the experimental and the theoretical elasticstiffness
Specimen J-6 J-8 J-10 J-12Experimental elastic stiffness(kNmiddotm) 139819 137719 135781 137168
eoretical elastic stiffness(kNmiddotm) 136282 137595 138915 140241
Error () minus 260 minus 009 +226 +219
Table 6 Coefficients of rotation in the simplified trilinear skeletoncurve
Specimen α1 α2 α3J-6-1 085 201 285J-8-1 087 207 324J-8-2 084 205 296J-8-3 085 213 320Calculated value 085 207 306Standard deviation 004 004 016
ε
σ
εy
σy
ndashεy
σy
εuεpndashεpndashεu
σu
σu
NominalReal
Figure 7 Strain-stress relationship of the EDP
ε
σ
E E
1εpl
0εpl
(1-D)E
σ0
σy0D = 0
σ
Dσ
Figure 8 e strain-stress relationship of the damage degradationmodel
250
l
b
Ft
Figure 6 FE model and boundary condition
Advances in Civil Engineering 7
where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

where ll0 is equal to 1 + εnom in this way the relationship ofnominal and real strain and stress can be described as
σrea σnom 1 + εnom( 1113857 (7)
εrea 1113946l
l0
dl
l ln
l
l0 ln 1 + εnom( 1113857 (8)
where εnom and εrea represent nominal and real strainsrespectively
e transformation of the detailed nominal and realstrain and stress of the steel is presented in Table 7
e stress and deformation of the EDP at the maximumdisplacement are shown in Figures 9(a) and 9(b) Von Misesstress nephogram is applied to show the stress distributione maximum stress or strain occurs mainly in the actualdissipation segment while the other parts remain in theelastic range It corresponds well with the design aims andfailure mode of the tests
Figure 9(c) shows the displacement-force relationship ofthe EDP whereas the loading capacity of the energy-dissipation joint can be obtained from equation ME
FEDP(h + t) [28] e result indicates that the relative errorsbetween the tests and simulations of the four energy-dis-sipation joint are all less than 15 within the acceptablerange
Considering the fact that the cross section of EDP cannotfully yield when connection failed a coefficient η Mp[fubt(h + t)] is used to quantify the partial yielding effectwhere fu is the ultimate strength of the steel
e size of the energy-dissipation plate has theprevalent influence on the moment-carrying capacity andductility of the energy-dissipation joint FE simulationswere conducted by varying only width (from 50mm to100mm) thickness (from 6mm to 12mm) cross section(from 500mm2 to 1000mm2) and length-to-thicknessratio (from 66 to 16) e correlations between loadingcapacity and these parameters were analyzed in SPSS andthe results are presented in Table 8 e results revealedthat the Pearson correlations of the four elements are allgreater than 06 indicating the pronounced relation ofthese elements with the loading capacity of energy-dis-sipation plate Table 8 also shows the reliability of theseparameters which equals to 1minus ξ and ξ refers to themaximum variation range when the other parameterschanges with one parameter determined e conclusionthat length-to-thickness ratio can serve as a stable andreliable parameter compared with thickness and widthcan be drawn In this paper the length-to-thickness ratiowas chosen as an independent variable and η(Mp[fubt(h + t)]) as the dependent variable to explore theloading capacity of the energy-dissipation joint
Other 88 FE simulations by varying length-to-thickness ratio of the EDP (λ lt) were carried out basedon the same method above It turned out that the co-efficients η and λ tend to have a negative exponentialcurve An empirical relationship between η and λ can beobtained by data fitting which is expressed as follows[28]
η 0978 66le λle 72
0749 + 1150eminus (λ1897) 72lt λle 1601113896 (9)
Mp ηfubt(h + t) (10)
e comparison of the peak moments computed byequation (10) with those obtained by testing for groups J-6and J-8 shows good agreements with all the relative errorsless than 15 [28] By combining the above hypotheses withfinite element simulation performed in ABAQUS the load-carrying capacity of the energy-dissipation joint can beestimated by equation (10) In accordance with the Chinesestandard GB50017-2017 [32] 085Mp is taken as the ulti-mate moment in the simplified skeleton curve shown asfollows
Mu 085Mp (11)
42 Method to Obtain the Simplified Skeleton Curve ecalculation flow chart for constructing the simplified trilinearskeleton curve is presented in Figure 10 e elastic stiffnessand rotation can be calculated at the first step by assigning thesizes of the joint and its mechanical properties related toYoungrsquos modulus and the yield strength e yield peak andultimate rotations of the joint can be obtained by three co-efficients multiplying the elastic rotation respectively Hencethe coordinates of the yield point can be gottene other twomoments of the critical points of the simplified skeleton curvecan be calculated from equations (10) and (11) With all thevalues of the critical points the stiffness of the three workingstages can be calculated as follows
K1 KE (12)
K2 Mp minus My
θm minus θy
Mp minus α1ME
α2 minus α1( 1113857θE
(13)
K3 Mu minus Mp
θm minus θy
Mu minus Mp
α3 minus α2( 1113857θE
(14)
5 Simplified Hysteretic Rules
To examine the theoretic hysteretic rules of the energy-dissipation joint a single loop within the whole hysteresisloops of J-8-1 is highlighted as shown in Figure 11 eshape and feature of the experimental hysteresis loops wereanalyzed and some conclusions were reached (1) the reverseS-shape or Z-shape of the hysteresis loops indicates theirpronounced pinching characteristics (2) the relation of M minus
θ in the loading process is a straight line and (3) thereloading and unloading relations of M minus θ are approxi-mately straight lines the slope of which is smaller than thatof the loading process erefore there is a strength deg-radation in the reloading and unloading processes
In Figure 12 a concave hexagon made up of six lines isproposed to simulate the reloading pinching and unloadingprocesses of the hysteresis loop where different slopes
8 Advances in Civil Engineering
Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

Table 7 Transformation of nominal and real stain and stress of the steel
Nominal stress (MPa) Nominal strain Real stress (MPa) Real strain Plastic strain314 00015 3145 00015 0315 0003 3159 0003 00015445 015 51175 0139 0137445 04 580 034 0337mdash mdash 600 mdash 2Note the last row of real strain and stress is only used to ensure that the final plastic stress is great enough and the stress-strain relationship keeps increasing inABAQUS ere is no actual meaning of it
5505255004764514264013763523273022772522272031731531231007954294
(a)
Failure and element
deletion
(b)
5 10 15 200Displacement (mm)
0
50
100
150
200
250
Forc
e (kN
)
(c)
Figure 9 FE simulation results in ABAQUS (a) stress nephogram of EDP (b) failure mode (c) displacement-force curve
Table 8 e Pearson correlation and reliability of different parameters
Parameter Pearson correlation with loading capacity Reliability ()Width of EDP 0696 6236ickness of EDP 0625 5623Length-to-thickness ratio minus 0792 9547Cross section of EDP 0655 5025
Input the parametersof the joint
Calculation of elasticstiffness and rotation
Input the calculationof rotations
Input the calculationof moments
Calculation of yieldand descend stiffness
End
Figure 10 Calculation flow chart for constructing the simplified trilinear skeleton curve
Advances in Civil Engineering 9
between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

between loading and unloading can simulate its stiffnessdegradation e advantages of this type of simplifiedhysteretic rules are presented in the following (1) the fourmovable points in the hexagon indicate that the hexagon canbe changed into different shapes ie there is flexibility tosimulate hysteresis loops of various shapes (2) with thecritical points properly determined the hysteretic charac-teristics of the loop such as the stiffness of reloading andunloading and the dissipated energy can be simultaneouslysimulated without losing precision
In the concave hexagon the maximum and minimumpoints got from the skeleton curve refer to the maximumminimum reaction forces when the corresponding dis-placements are exerted e other four points are related tothe pinching and reloading stiffness deterioration of theenergy-dissipation joint Point (x1 y1) and Point (x4 y4)serve as ldquobreaking pointsrdquo that indicate the extend ofpinchinge combination of Point (x1 y1) and Point (x3 y3)or Point (x2 y2) and Point (x4 y4) can be used to calculate thereloading stiffness which is lower than K1 because of thedeterioration of pinching
51 Parametric Optimization e genetic algorithm (GA) isa metaheuristic inspired by the natural selection processwhich belongs to the larger class of evolutionary algorithms(EA) In recent studies GAs have proven their pronouncedadvantages [35 36] ie the simplicity robustness andinsensitivity of initial values for global optimization prob-lems of some large and complex nonlinear systems ey arecommonly used to generate high-quality solutions for op-timization and search problems by relying on bio-inspiredoperators such as mutations crossover and selection emechanism of GA presented in Figures 13 and 14 can beexplained as follows
(1) Initial value random solution values of parameterswithin specified boundary are chosen in the first stepto simulate the first generation of the population
(2) Crossover to increase the diversity of solutionvectors the operation of crossover is performedNew solution vector may inherit one part fromsolution vector A and the other part from solutionvector B In other words the new vector is composedof two parts from two different vectors respectively
(3) Mutation if the solution vector of the last or initialgeneration does not meet the tolerance of the fitnessfunction vectors with few different values are gen-erated when passed generation by generation emutated vectors of the population might reach arelatively great number after serval generationswhich will increase the diversity of the solutionvectors further
(4) Selection the initial mutated and crossbreed so-lution vectors are all checked if they meet the tol-erance of the fitness function which is also theoptimization objective of the algorithme solutionvectors with less errors will become the dominantindividuals which will be passed to the next gen-eration In this way the solution vector will beoptimized to a fitter onee process of selection willbe repeated generation by generation until the bestsolution vector occurs
In Matlab the GA toolbox can be used to achieve theoperations above e construction of fitness function andboundary determination of the parameters are the two as-pects of upmost importance
In this section the GA is used to identify and optimizethe critical parameters of the hysteretic curve and the fitnessfunction of the genetic algorithm is shown in the followingequation
J ABS[(S minus s)S] (15)
where S and s are the areas of the test and the simplifiedhysteresis loop respectivelye range of eight parameters isset as follows xllt xlt xu where xl and xu represent the upperand lower bounds of the variable
eoretically the critical values of the concave hexagonare in the range of the maximum and minimum but somerestrictions must be added to ensure the best fitness for thesingle hysteresis loop e method to determine the lower
(xmax ymax)
(x1 y1)
(x3 y3)
(x2 y2)
(x4 y4)
(xmax ymax)
Figure 12 Simplified hysteretic rule of the joint
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
Figure 11 Hysteresis loops of the joint
10 Advances in Civil Engineering
and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

and upper bounds is illustrated in Figure 15 with a singlehysteresis loop where LB represents the lower bound and UBrepresents the upper bound of the parameter Two main stepsare included in the method the rough values of each criticalpoints are first found and then expanded to a certain range
Point 1 and Point 3 are the turning points of the hys-teresis loop whose rough values can be gotten directly fromthe picture However the other two points (Point 2 andPoint 4) can be calculated as the cross points of the twotangent lines of the reloading and unloading curves Withthe rough values of the four critical points determined theranges of each parameters can be set as [090 110] times therough values
Other parameters set in the GA tool are presented asfollows the population size is equal to 1000 the number ofgenerations is equal to 50 the ratio of crossover is set as 08and the function tolerance of function J is set as 10minus 6 Pa-rameters of a single loop optimized by the GA are shown inTable 9
Figure 16(a) presents the comparison of the singlehysteresis loop between the test and the simplified modelFigure 16(b) shows the relative area error between the testand the simplified model with the increase in the evolutionalgebra of the populations From Figure 16(a) the overalltrend between the test result and the simplified model in-dicates their agreement e latter figure shows that the areaerror between the test and the simplified model is less than10minus 6 so the energy dissipation of the hexagon is identical tothat of the actual test when the simplified hysteretic rule isused
52 Parameters Optimized by the GA e same method canbe used to optimize the parameters of other hysteresisloops and the data collection processes are identical to thatof Section 51 e result reveals that the values (dis-placement and force) of the critical points increase with theincrease in maximum displacement or force and the re-lationships between the two factors tend to be straight linesor nonlinear curves To make the relationships more ex-plicit the ratio of θ to θp is selected as the independentvariable instead of θ
As mentioned in Section 3 the maximum and mini-mum moments and rotations at each cycle can be cal-culated from the skeleton curve us eight coefficients(ie ξ1 to ξ8) are used to determine the ratio between x1x2 x3 x4 y1 y2 y3 and y4 to the maximum and min-imum values xmax xmin ymax and ymin of each hysteresisloop Detailed definition of ξ is presented in Table 10 andμ is the ratio of θ to θp Linear algorithm in ORIGIN wasselected to describe the relationships of μ and ξ as shownin Figure 17
In the analysis of the parameters optimized by the GAthe critical points of the hysteretic rules are related to theratios of measured rotation θ to the peak rotation θp In theregression analysis the four critical points considering theeffect of μ (05lt μlt 15) are presented in the followingequations
Initialsolutions
Encoding1100101010101110111000110110011100110001
11001010101011101110
11001011101011101010
Crossover
ChromosomeOffspring
0011011001
0011000001
Mut
atio
n110010111010111010100011000100
DecodingSolution candidates
Fitness computationEvaluation
Selection
Terminationcondition
No
Best solution
Figure 13 eory and main steps of GA
Fitnessfunction
No
EndYes
Crossover
Mutation
Selection
Initial value
Figure 14 Calculation flow chart of GA
LB of y3
UB of y3
LB of x3UB of x3
Point 1 (x1 y1)
Point 2 (x2 y2)
Point 1 (x4 y4)ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
000 001ndash001θ (rad)
Figure 15 Method to determine the LBs and UBs of theparameters
Advances in Civil Engineering 11
ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

ξ1 ξ7 0180 (16)
ξ2 0550μ minus 0049 (17)
ξ3 ξ5 041 05le μle 11
051 11lt μle 151113896 (18)
ξ4 ξ6 0230 (19)
ξ8 0531μ minus 0025 (20)
6 Comparison of the Tests andSimplified Model
61 Comparison of the Skeleton Curves Based on the flowchart shown in Figure 10 the simplified skeleton curves ofthe first four groups in Table 1 are obtained and Figure 18presents the comparison of the skeleton curve from the testand simplified skeleton curves e results show that the twoskeleton curves are notably consistent with each other andthat the simplified skeleton curve can basically simulate therelation of M and θ
Table 9 Parameters optimized by the GA
Parameters x 1 y 1 x 2 y 2 x 3 y 3 x 4 y 4
Optimized value 00035 235089 00028 minus 266329 minus 00032 21513 minus 00032 minus 266855Upper bound 0004 25 0004 minus 23 minus 0002 25 minus 0003 minus 23Lower bound 0003 21 0002 minus 29 minus 0004 21 minus 0004 minus 29
TestSimplified model
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
M (k
Nm
)
ndash0005 0000 0005 0010ndash0010θ (rad)
(a)
Best 245836e ndash 11 Mean 312894e ndash 05
Best fitnessMean fitness
0
0002
0004
0006
0008
001
0012
0014
0016
Fitn
ess v
alue
10 20 30 40 50 600Generation
(b)
Figure 16 Comparison of the (a) hysteretic curve and (b) generation-absolute error curve between the test and the simplified model
Table 10 Detail information of ξ
ξ ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8x1xmax y1ymax x2xmax y2ymin x3xmin y3ymax x4xmin y4ymin
12 Advances in Civil Engineering
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

6mmndash1
8mmndash18mmndash2
8mmndash3
ξ1 = 0180
010
015
020
025
030ξ 1
10 12 14 1608μ
(a)
6mmndash1
8mmndash18mmndash2
8mmndash3
μ
ξ2 = 055μminus0049
08 10 12 14 1603
04
05
06
07
08
09
ξ 2
(b)
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055
ξ 3
10 12 14 1608μ
(c)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ4 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030ξ 4
(d)
Figure 17 Continued
Advances in Civil Engineering 13
e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

e comparison between the ductility calculated from theexperimental and the predicated skeleton curve is presentedin Table 11 which shows that the errors are less than 10
62 Comparison of Hysteresis Loops e hysteretic rules forthe energy-dissipation joint were simplified as a concavehexagon the critical points of which were optimized by theGA as previously mentioned e hysteretic curves obtainedfrom the simplified model and the tests of the first fourgroup in Table 1 are compared in Figure 19
e comparison between the damping ratio obtainedfrom the experimental and the simplified model is presented
in Table 12 e errors are less than 10 within acceptablerange
63 Simplified Restoring Force Model Combining the sim-plified skeleton curve and hysteretic rules of the energy-dissipation joints a simplified restoring force model of theenergy-dissipation joint is constructed as presented inFigure 20
In Figure 20 Points 1 2 and 3 are the yield point peakpoint and ultimate point in the positive direction respec-tively and Point 4 Point 5 and Point 6 are the yield pointpeak point and ultimate point in the negative direction e
6mmndash1
8mmndash18mmndash2
8mmndash3
035
040
045
050
055ξ 5
10 12 14 1608μ
(e)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ6 = 0230
10 12 14 1608μ
018
020
022
024
026
028
030
ξ 6
(f )
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ7 = 0180
010
015
020
025
030
ξ 7
10 12 14 1608μ
(g)
6mmndash1
8mmndash18mmndash2
8mmndash3
ξ8 = 0531μminus0025
03
04
05
06
07
08
09ξ 8
10 12 14 1608μ
(h)
Figure 17 Parameters optimized by the GA (a) ξ1 (b) ξ2 (c) ξ3 (d) ξ4 (e) ξ5 (f ) ξ6 (g) ξ7 (h) ξ8
14 Advances in Civil Engineering
detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

detailed loading and unloading path to establish the re-storing force model consists of the following steps
(I) When the maximum load is less than yield momentMy the energy dissipated by the joint is negligibleBoth the loading stiffness and unloading stiffnessare equal to the elastic moment stiffness KE or
preyield moment stiffness K1 and the hystereticrule is a straight line
(II) When the maximum load is between the yieldmoment and peak moment the pinching in thehysteresis loop of the energy-dissipation jointsbecomes prominent e shape becomes a reversed
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash0001 0000 0001 0002ndash0002θ (rad)
(a)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(b)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(c)
TestPredicted
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash0001 0000 0001 0002ndash0002θ (rad)
(d)
Figure 18 Comparison between the experimental and the predicated skeleton curves for (a) J-6-1 (b) J-8-1 (c) J-8-2 and (d) J-8-3
Table 11 Comparison of the ductility from the experimental and the simplified skeleton curves
Specimen J-6-1 J-8-1 J-8-2 J-8-3Ductility of the test 295 320 301 304Ductility of the simplified skeleton curve 276 302 302 302Error () 644 563 033 066
Advances in Civil Engineering 15
S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

S-shape and the hysteretic rule in this segment canbe simplified as a concave hexagon e criticalpoint values of this hexagon are presented inequations (11) to (20) e unloading andreloading path is 7⟶13⟶14⟶ 8⟶11⟶ 12⟶ 7
(III) When the joint reaches the softening stage theenergy dissipated by the joint increases with the
displacement due to the lateral loading and thehysteresis loop becomes slightly chubby so that itspinching effect is weaker than that in the stage IIe shape of the hysteresis loop becomes a hexa-gon e parameters of the hysteretic rule can beobtained from equations (11) to (20) eunloading and reloading path is9⟶17⟶18⟶10⟶15⟶16⟶ 9
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(a)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
ndash001 000 001 002ndash002θ (rad)
(b)
TestSimplified model
ndash001 000 001 002ndash002θ (rad)
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100
M (k
Nm
)
(c)
TestSimplified model
ndash100
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
100M
(kN
m)
ndash001 000 001 002ndash002θ (rad)
(d)
Figure 19 Comparison between the hysteretic curve obtained from the experimental and the simplified model (a) J-6-1 (b) J-8-1 (c) J-8-2(d) J-8-3
Table 12 Comparison of the damping ratio between the test and simplified model
Specimen J-6-1 J-8-1 J-8-2 J-8-3Maximum damping ratio of the test 0311 0312 0305 0292Maximum damping ratio of the simplified model 0293 0312 0299 0282Error () minus 579 0 minus 197 minus 342
16 Advances in Civil Engineering
7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

7 Conclusion
Based on the experimental skeleton curves of the energy-dissipation joint in steel-engineered bamboo hybrid framesa simplified symmetric trilinear skeleton curve and a sim-plified concave hexagon were established to relatively matchwith the experimental skeleton curve and hysteretic rulese errors of ductility and damping ratio between the testsand calculated hysteretic model are all within 10 and theskeleton curve and hysteresis loops of tests and proposedhysteretic model are in good agreement
Data Availability
eXLSX data used to support the findings of this studymaybe accessed by emailing to the corresponding author eavailable time will be six months after the publication sincethere are still some researches and articles for submissionbased on this manuscript and the original data
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
e study was supported by the National Intensive ResearchProject (2017YFC0703500) and the National Natural ScienceFoundation of China (no 6505000184) eir supports aregratefully acknowledged
References
[1] E Hurmekoski R Jonsson and T Nord ldquoContext driversand future potential for wood-frame multi-story constructionin Europerdquo Technological Forecasting and Social Changevol 99 pp 181ndash196 2015
[2] B Sharma A Gatoo M Bock and M Ramage ldquoEngineeredbamboo for structural applicationsrdquo Construction andBuilding Materials vol 81 pp 66ndash73 2015
[3] J Zhang M He and Z Li ldquoCompressive behavior of glulamcolumns with initial cracks under eccentric loadsrdquo Interna-tional Journal of Advanced Structural Engineering vol 10no 2 pp 111ndash119 2018
[4] D Huang Y Bian A Zhou and B Sheng ldquoExperimentalstudy on stress-strain relationships and failure mechanisms ofparallel strand bamboo made from phyllostachysrdquo Con-struction and Building Materials vol 77 pp 130ndash138 2015
[5] Z Chen and Y H Chui ldquoLateral load-resisting system usingmass timber panel for high-rise buildingsrdquo Frontiers in BuiltEnvironment vol 3 p 40 2017
[6] Pei S Van de Lindt J W Pryor S E Shimizu H Isoda H ampRammer D Seismic testing of a full-scale mid-rise buildinge NEESWood Capstone Test MCEER 2010
[7] Z Li M He F Lam M Li R Ma and Z Ma ldquoFinite elementmodeling and parametric analysis of timberndashsteel hybridstructuresrdquoDe Structural Design of Tall and Special Buildingsvol 23 no 14 pp 1045ndash1063 2015
[8] Z Li H Dong X Wang and M He ldquoExperimental andnumerical investigations into seismic performance of timber-steel hybrid structure with supplemental dampersrdquo Engi-neering Structures vol 151 pp 33ndash43 2017
[9] P Bhat R Azim M Popovski and T Tannert ldquoExperimentaland numerical investigation of novel steel-timber-hybridsystemrdquo in Proceedings of the World Conference on TimberEngineering Quebec City Canada August 2014
[10] C Loss M Piazza and R Zandonini ldquoConnections for steel-timber hybrid prefabricated buildings part i experimentaltestsrdquo Construction and Building Materials vol 122pp 781ndash795 2016
[11] K W Johansen ldquoeory of timber connectionsrdquo Deory ofTimber Connections pp 249ndash262 1949
[12] A Bouchaır P Racher and J F Bocquet ldquoAnalysis ofdowelled timber to timber moment-resisting jointsrdquo Mate-rials and Structures vol 40 no 10 pp 1127ndash1141 2007
[13] N Kharouf G McClure and I Smith ldquoElasto-plastic mod-eling of wood bolted connectionsrdquo Computers amp Structuresvol 81 no 8ndash11 pp 747ndash754 2003
[14] Y Araki T Endo and M Iwata ldquoFeasibility of improvedslotted bolted connection for timber moment framesrdquo Journalof Wood Science vol 57 no 3 pp 247ndash253 2011
[15] M Mohammad and J H Quenneville ldquoBolted woodndashsteeland woodndashsteelndashwood connections verification of a newdesign approachrdquo Canadian Journal of Civil Engineeringvol 28 no 2 pp 254ndash263 2001
[16] T Shiratori A J M Leijten and K Komatsu ldquoe structuralbehaviour of a pre-stressed column-beam connection as analternative to the traditional timber joint systemrdquo EngineeringStructures vol 31 no 11 pp 2526ndash2533 2009
[17] F Wanninger and A Frangi ldquoExperimental and analyticalanalysis of a post-tensioned timber connection under gravityloadsrdquo Engineering Structures vol 70 pp 117ndash129 2014
[18] Z Ling W Liu and H Yang ldquoReliability analysis and designrecommendations on bond-anchorage of glulam joints withglued-in rodrdquo Journal of Nanjing Tech University (NaturalScience Edition) vol 43 no 10 2015 in Chinese
[19] E Crayssac X Song Y Wu and K Li ldquoLateral performance ofmortise-tenon jointed traditional timber frames with wood panelinfillrdquo Engineering Structures vol 161 pp 223ndash230 2018
[20] H Xiong Y Liu Y Yao and B Li ldquoExperimental study ofreinforcement methods and lateral resistance of glued-
P
1
2
3
4
5
6
7
8
9
10
11
12
1314
15
16
17Δ
18
Figure 20 Restoring force model of the energy-dissipation joint ina steel-engineered bamboo hybrid frame
Advances in Civil Engineering 17
laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering

laminated timber post and beam structuresrdquo Journal of TongjiUniversity (Natural Science) vol 5 no 6 pp 379ndash385 2016in Chinese
[21] Z Li M He and K Wang ldquoHysteretic performance of self-centering glulam beam-to-column connectionsrdquo Journal ofStructural Engineering vol 144 no 5 Article ID 04018031 2018
[22] X Cai and S Meng ldquoResearch on restoring force model of theprestressed self-centering concrete frame jointsrdquo EngineeredMechanics vol 35 no 1 pp 182ndash190 2018 in Chinese
[23] A H Buchanan and R H Fairweather ldquoSeismic design ofglulam structuresrdquo Bulletin of the New Zealand Society forEarthquake Engineering vol 26 no 4 pp 415ndash436 1993
[24] H J Larsen and J L Jensen ldquoInfluence of semi-rigidity ofjoints on the behaviour of timber structuresrdquo Progress inStructural Engineering and Materials vol 2 no 3 pp 267ndash277 2000
[25] H Yang W Liu and X Ren ldquoA component method formoment-resistant glulam beam-column connections withglued-in steel rodsrdquo Engineering Structures vol 115 pp 42ndash54 2016
[26] V Karagiannis C Malaga-Chuquitaype and A Y ElghazoulildquoBehaviour of hybrid timber beam-to-tubular steel columnmoment connectionsrdquo Engineering Structures vol 131pp 243ndash263 2017
[27] H Xiong Y Liu Y Yao and B Li ldquoExperimental study onlateral resistance of timber post and beam structuresstrengthened with carbon fiber reinforced polymerrdquo Journalof Tongji University (Natural Science) vol 10 no 3 2015
[28] Z Huang Z Chen D Huang and Y-H Chui ldquoCyclic loadingbehavior of an innovative semi-rigid connection for engi-neered bamboo-steel hybrid framesrdquo Journal of BuildingEngineering vol 24 Article ID 100754 2019
[29] X Lu X Yin and H Jiang ldquoRestoring force model for steelreinforced concrete columns with high steel ratiordquo StructuralConcrete vol 14 no 4 pp 415ndash422 2013
[30] J Zhao and H Dun ldquoA restoring force model for steel fiberreinforced concrete shear wallsrdquo Engineering Structuresvol 75 pp 469ndash476 2014
[31] Y Liu C Malaga-Chuquitaype and A Y Elghazouli ldquoRe-sponse and component characterisation of semi-rigid con-nections to tubular columns under axial loadsrdquo EngineeringStructures vol 41 pp 510ndash532 2012
[32] National Standard of the Peoplersquos Republic of China Standardfor Design of Steel Structures GB50017 China Planning PressBeijing China 2017
[33] ASTM Standard Test Method for Cyclic (Revised) Load forShear Resistance of Vertical Elements of Lateral Force ResistingSystem for Building ASTM E2126-11 American Society forTesting Materials West Conshohocken PA 2011
[34] P Zhang Nonlinear Analysis of Reinforced Concrete SeismicStructure Science Press Beijing China 2003
[35] Z Michalewicz Genetic Algorithms +Data Structur-esEvolution Programs Springer Berlin Germany 1996
[36] G Zames N M Ajlouni N M Ajlouni et al ldquoGenetic al-gorithms in search optimization and machine learningrdquoInformation Technology Journal vol 3 no 1 pp 301-3021981
18 Advances in Civil Engineering