-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.1
_____________________________________________________________________________
GENERAL INTRODUCTION. Analyzing the dynamic behavior of resource
systems is important for understanding and managing populations in
contexts such as fisheries, forests, wildlife populations and
agriculture. In addition, resource systems analysis is important
when applied to human populations and their resource demands. With
respect to the latter, there is a widely (although not universally)
held belief that providing for our resource needs on a sustainable
basis is one of the most significant challenges facing humanity in
the 21st century. As we shall see, resource systems can be analyzed
as lumped systems using approaches similar to those applied to
other systems. There are however several distinctive features of
resource systems that are useful to recognize at the outset. In
particular: a) Component equations are often descriptive rather
than mechanistically-based. b) The values of constants appearing in
component equations are often hard to come by in practice. c)
System behavior featuring growth (over a finite time period) as
well as decay is common. d) Most resource systems, even simple
ones, are non-linear. Because of features a) and b), resource
system modeling tends to be somewhat more concerned with gaining
insight into characteristic system behaviors as opposed to
quantitative prediction. Because of features c) and d), the
behavior of even simple resource models is often difficult to
intuit in the absence of a model and its solution. VARIABLES. Many
resource systems may be usefully thought of as consisting of a one
or more resources, one or more consumers, and a specified set of
functional relationships between these. We will begin with examples
involving a single resource and one consumer. These examples will
illustrate some of the characteristic (and distinctive) behavior of
resource systems, and will also make clear how one would go about
analyzing systems with more components. The following nomenclature
will be used: R = number or amount of resource per system unit C =
number of amount of consumers per system unit Examples of resources
for which R might be defined include the mass of plankton per m3
ocean water (available as a resource for fish to feed on), the tons
of grass per hectare (available for terrestrial herbivores to feed
on), the number of hares per hectare (available for carnivores),
and the mass of soil organic matter per acre (which enhances soil
fertility and increases the growth rate of plants). Examples of
consumers for which C might be defined include one or more species
of fish that feed on plankton, one or more herbivores that feed on
plankton, one or more carnivores that feed on hares, and humans
that harvest organic matter.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.2
_____________________________________________________________________________
Sometimes it is convenient to take the system unit to be the
system itself; then the units become simply mass of plankton (in
the system), tons of plant matter, number of hares, or mass of
organic matter rather than these quantities per some system unit.
Also, a given entity may be both a resource and a consumer. For
example, hares eat grass and are eaten by lynx, and fish may eat
plankton (or little fish) and be harvested and eaten by humans or
bigger fish. Components and component equations. We will call the
functions that specify the rate of consumption of a particular
resource rate laws as we did for reacting systems. In so doing it
should be recognized that rate laws for resource systems may or may
not be describing an actual reaction, and that the form of the rate
law may or may not stem from mechanistic considerations1.
Accounting equation. The form of the accounting equation often used
for resource calculations is essentially the same as the material
balance:
=dtdC
dtdR or rate of regeneration or addition rate of consumption or
removal [1]
Several examples will be given below. It may be noted that when
the units of R or C are concentration (material/volume) then
equation [1] is truly a material balance. However, when the units
of R or C are numbers of individuals (e.g. of hares or fish), then
equation [1] becomes a population balance. In this case, we are
actually modeling a discrete system as a continuous system. This is
a good approximation if the numbers are sufficiently large.
Non-Renewable Resources. When a resource is not regenerated or
added to the system on an ongoing basis, the resource may be said
to be non-renewable. A fixed initial quantity of the resource is
consumed according to the rate laws involving that resource, and
eventually is exhausted. This corresponds to the situation for
batch reacting systems as previously considered. Example 1.
Utilization of a non-renewable resource. Consider a non-renewable
resource R and a consumer C for which the rate of resource
consumption and consumer production are given by: rR RC= - kRC
[1]
rC RCkY = Y- = RCC/RRC/R r [2] where kRC is a rate constant
(consumer units-1time-1)
YC/R is the yield of consumers produced per unit of resource
consumed (consumer units/resource units)
1 Empirically-determined rate laws that do not reflect
mechanistic considerations are often used for reacting systems as
well as resource systems. The growth rate of microorganisms is a
common example. We also saw something similar in thermal systems,
where thermal resistance for convection is typically derived from
experimental measurements.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.3
_____________________________________________________________________________
Note that the form of the rate expression for consumption of R
in equation [1] is consistent with the rate being proportional to
the probability of the resource and consumer being in the same
location at the same time as discussed previously for reacting
systems. Other forms may also be applicable for a particular case
(e.g. when the rate per consumer approaches a constant value at
high R). These two equations describe the common situation for
which the yield of C with respect to resource consumption is other
than (an typically less than) unity. We can use material balance to
write state-space equations for this system:
RCkdtdR
RCkYdtdC
RC
RCRC
=
= /
We can solve this system using ode45 in MATLAB, by writing a
function that calculates the derivative: function y = dXdt(t,x) %L.
Lynd 1/00, rev. C. Sullivan 6/00 R= x(1); C= x(2); Kr = 0.04;
%1/(consumer units)/(time) Ycr = 0.2; %(consumer units)/(resource
units) y(1,1) = -Kr*R*C; y(2,1) = Ycr*Kr*R*C;
Results with initial conditions R(0) = 10, C(0) = 0.1 are
plotted in Figure 1 below. The shape of the resource curve in
Figure 1 is characteristic of non-renewable resource utilization
and is called the S curve.
R
C
Consumer or Resource Units
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.4
_____________________________________________________________________________
Renewable Resources. Renewable resources are either regenerated
or continuously added to the system. For some renewable resources,
such as solar energy, the resource exists as a flow rather than a
stock. There is no need for a state variable and accounting to keep
track of it. Putting a solar panel in the sun today does not
decrease the amount of sunlight that will be available tomorrow.
Thus, there will rarely be interesting system dynamics involved in
describing such resources. (The systems that use these resources,
such as electrical power converters for photovoltaic systems, or
buildings that use solar heating, involve some very interesting
system dynamics, some of which we will see later in this course.)
Renewable resources involving a flow may also have storage of a
stock. For example, a hydroelectric system such as Wilder Dam
involves a large quantity of potential energy stored in water
behind the dam, and a flow replenishing that stored energy. Perhaps
the most interesting system dynamics in resources systems are those
of biological renewable resources. With a dam, the rate of
replenishment is independent of the rate at which the resource is
used. In a biological system, however, the rate of regrowth of a
resource depends on the level of that resource. For a wolf, a
rabbit is a resource, and the growth rate of rabbit population
depends, of course, on how many rabbits are around producing
offspring. For a first approximation, we can assume, then, that the
regeneration rate is proportional to R (in this case, the
population of rabbits). rg = kgR when rg is limited only by R [3a]
where
kg = a rate constant Equation [3a] can be valid for a time when
a population is growing under resource-plentiful conditions and is
limited by its rate of reproduction. Alternatively, rg may be
limited by some resource other than R, or may be self-limiting. In
the self-limiting case, rg may be positive at low values of R but
have a limiting value at high values of R. An expression describing
this behavior is
rg = sat
g,
R + kRr max [3b]
where
rg,max is the maximum rate of formation of R (occurring at high
R. The units of rR,max are the units of R per time.
ksat is a saturation constant, which has the same units as R and
is equal to the value of R
when rg/ rg,max = 1/2. A common example of a situation for which
the rate of resource-generation is self-limiting is plant growth,
where more plant matter (e.g. per hectare) allows increasing rates
of plant production up to a point until the available sunlight is
fully utilized and addition of more plant matter would shade plants
(or parts of plants) that are already there.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.5
_____________________________________________________________________________
Example 2. Utilization of a self-limiting renewable resource by
a single consumer. Consider the following system:
RRC - k - k
R + kRr
=
=dtdR
dRCsat
R,max
decay rate -n consumptio rate -on regenerati rate [4]
and
( )( )( )( )mRCC/R
mRCC/R
C/R
C/R
R - kkC = YCRC - kk = Y
= Y
= YdtdC
e"maintenanc"for requiredn consumptio R rate - consumed is R
rate gross
growthfor available is R ratenet
[5]
where
kd is a rate constant for resource decay (time-1)
km is a rate constant reflecting the maintenance rate of
resource consumption (resource unitsconsumer units-1time-1)
The rate expression for resource consumption in equation [4]
follows directly from equation [1]. Many resources are subject to
some sort of decay. Note that without this term R would increase
without bound in the absence of C, which is not realistic. In
equation [5], the quantity kRCR corresponds to rate of resource
consumption per consumer. If kRCR > km, then dC/dt is positive
and most resource consumption is used to produce more C rather than
for maintenance. In the limit if kRCR >> km, then essentially
all resources are used for growth of C and km may be neglected
(this was implicitly assumed for example 1). If kRCR < km, then
dC/dt is negative which for many systems corresponds to starvation.
In the limit if there is no R present, then C declines with decay
constant = YC/Rkm. In order to simulation this system numerically,
we can use ode45 with the following derivative function.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.6
_____________________________________________________________________________
function y = dXdt(t,x) %Lynd/Sullivan % modified 7/00 R= x(1);
C= x(2); rgmax = 2; %resource units/system units/time Ksat = 1;
%1/2 saturation constant (resource units/system units) Krc = 0.03;
%resource consumption constant
%(system units/consumer units/time) Krd = 0.2; %resource decay
constant (1/time) Ycr = 0.5; %resource -> consumer conversion
yield;
%consumer units/resource units Kmc = 0.5; %Maintenance
constant
%(resource units/consumer units/time) rg = rgmax*R/(R + Ksat);
y(1,1) = rg - Krc*R*C - Krd*R; y(2,1) = Ycr*C*(Krc*R - Kmc);
Simulations will be performed using the above file with the
values of the constants varied to demonstrate different situations
of interest. In these simulations, R(0) = 5 and ODE45 is used to
obtain the solution. First, let us consider the systems behavior in
the absence of consumers, which can be simulated if we let Ycr = 0
and C(0) = 0. Results are shown in Figure 2a below. We find that in
the absence of consumers, R rises to a steady-state value of 9.
0 50 100 1501
2
3
4
5
6
7
8
9
10
time
Res
ourc
e un
its
Fig. 2a. Resource growth with no consumers
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.7
_____________________________________________________________________________
If we next put the consumers back into the simulation by letting
Ycr = 0.5 and C(0) = 0.1 we obtain the results shown in Figure 2b.
We find that the steady state values of R and C are Rss = 2.5, and
Css = 1.9. Observe that while the resource level is high, the
consumers overshoot their final population, depleting the resource
slightly below its final value, but then with the lower resource
level, the population of consumers decreases again, allowing the
resource level to come up to its final value, although not up to a
level nearly as high as without consumers.
0 10 20 30 40 500
1
2
3
4
5
6
7
time
Res
ourc
e or
con
sum
er u
nits
RC
. Fig. 2b Results with krc = 0.2.
If we next increase the value of krc from 0.2 to 1, representing
a higher rate of resource consumption, we obtain the results shown
in Figure 2c., where Rss = 0.5 and Css = 1.1. The same overshoot
phenomenon occurs, but much more severely. When the consumer
population is high, the resource gets almost completely depleted,
and then the consumer population decays rapidly. One would not want
to be a consumer during this time period, but it is not as bad as
the situation with a non-renewable resource, in that with the
reduced population of consumers, the resource recovers, and neither
the consumers nor the resource are wiped out completely. However,
the resource recovers to a lower level than before, and the
population of consumers supported in steady state is just over half
of what it was with the lower value of krc.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.8
_____________________________________________________________________________
0 10 20 30 40 500
1
2
3
4
5
6
time
Res
ourc
e or
con
sum
er u
nits
RC
Fig. 2b Results with krc = 1.
It is interesting that changing the value of the parameter kRC
affects the steady state value of C, even though we have kept the
resource requirement to sustain a given population, km, constant.
The strategy with which we use a resource determines the population
that resource can sustain, independent of how efficiently we use
the resource. The steady-state value of C, Css is referred to in
ecology as the carrying capacity of the system. We could continue a
series of simulations to study the carrying capacity, but doing
repeated simulations gets tedious, and, in fact, we can easily
calculate the carrying capacity by finding a steady-state solution
of our system equations.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.9
_____________________________________________________________________________
To find the steady-state solution, we set the derivatives equal
to zero in [4] and [5]. From [5], either C = 0, or
( )RCm
mRC
k kR R - kk = /
0=
[6]
Substituting this in [4] with the derivative set to zero,
Ckk
- k + kk
r
Ckkk
- kk + kk
kr
kk
C - kkk
- k + k
kk
kk
r
RC
d
RCsatm
R,
mRC
md
RCsatm
mR,
RC
md
RC
mRC
satRC
m
RC
mR,
=
=
=
max
max
max
0
[7]
We can now use a simple MATLAB script (no differential equation
solutions involved) to plot the functions in [6] and [7] as a
function of krc % Plot steady state solution of renewable resource
example % Charlie Sullivan, 7/00 rm = 2; %max resource growth rate
(resource units/system units/time) Ks = 1; %1/2 saturation constant
for resource growth (resource units/system units) Krc =
linspace(0.06,2,100); %resource consumption constant %(system
units/consumer units/time) Krd = 0.2; %resource decay constant
(1/time) Km = 0.5; %Maintenance constant %(resource units/consumer
units/time) R = Km./Krc; C = rm./(Km + Ks*Krc) - Krd./Krc;
plot(Krc,R,Krc,C,'--') legend('R','C') ylabel('Consumer or resource
units') xlabel('k_{rc} [system units/consumer units/time]')
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.10
_____________________________________________________________________________
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
9
Con
sum
er o
r re
sour
ce u
nits
krc
[system units/consumer units/time]
RC
Fig. 2c. Steady state populations (carrying capacity) vs.
krc
In this plot, we see that the carrying capacity has a maximum
near krc = 0.2, and decreases above or below that. In essence,
below that point, the resource does not support a large population
because it is not being utilized to the consumers full advantage.
Above that point, however, the resource is being over-used, and
depleted to the point that it does not regenerate as rapidly as it
would be able to if it were used with more restraint. These
considerations are important in formulating and evaluating
strategies to sustainably support a population of consumers.
Examples of such consumer populations include wildlife, food
sources such as fish, and human beings. Example 3. Predator-prey
population cycles. Consider the same system model represented by
equations [4] and [5] and used to simulate example 2 but with a
different set of parameters: function y = dXdt(t,x) %x(1) = R %x(2)
= C % L. Lynd 1/00 Krc = 1.5e-4;%resource consumption constant
(system %units/consumer units/time) Kd = 0.1; %resource decay
constant (1/time) Ycr = 0.6; %resource -> consumer conversion
efficiency Km =1; %Consumer maintenance constant (resource %
units/consumer units/time) Ksat = 5e5; %saturation constant
(resource units) rgmax = 7.5e5; rg = rgmax*x(1)/(x(1) + Ksat);
y(1,1) = rg - Krc*x(1)*x(2) - Kd*x(1); y(2,1) = Ycr*x(2)*(Krc*x(1)
- Km);
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.11
_____________________________________________________________________________
Results when this m-file is used with ode45 and with initial
conditions R(0) = 1000, C(0) = 500 are plotted in Figure 3a. We see
that a slowly decaying oscillation occurs with a period of roughly
10 years. First, both R and C are low; next R grows (because there
are not many C); then C grows (because R is plentiful); R declines
(because C is plentiful), and finally C declines (because R is
low), bringing us back to the original point. It is instructive at
this point to examine further equation [3b]:
rg = sat
g,
R + kRr max [3b].
If ksat >R, then the limiting behavior of [3b] is described
by
rg = Rkr
sat
g,max [6b]
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
4
5
6x 104
time (years)
Figure 3a. Simulated preditor and prey populations, rgmax =
7.5e5, Ksat = 5e5
Population
Prey Predator
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.12
_____________________________________________________________________________
Equation [6b] is of the same form as equation [3a] rg = kgR [3a]
Thus we see that the equation we have used to describe the rate or
resource regeneration by self-limiting renewable resources [3b]
approaches a constant when ksat > R. When the size of renewable
resource R is limited by C, it may be permissible to use equation
[3a] to describe the rate of regeneration of R. rg = kgR [3a] This
corresponds to the case when the rate of resource regeneration is
not self-limiting. Replacing equation [3a] with equation [3b] in
the system represented by equations [4] and [5] gives:
RRC - kR - k = kdtdR
dRCg [4b]
and
( )mRCC/R R - kkC = YdtdC [5]
The following MATLAB derivative function can be used to solve an
example of a system modeled by equations [4b] and [5] with
constants and initial conditions as for the example presented in
Figure 3a. (The only change is that we have changed the resource
term so that it is not self-limiting). function y = dXdt(t,x) %x(1)
= R %x(2) = C %L. Lynd 1/00 Kg = 1.5; %resource units/system
units/time Krc = 1.5e-4;%resource consumption constant (system
%units/consumer units/time) Kd = 0.1; %resource decay constant
(1/time) Ycr = 0.6; %resource -> consumer conversion efficiency
Km =1; %Consumer maintenance constant (resource %units/consumer
units*time) y(1,1) = Kg*x(1) - Krc*x(1)*x(2) - Kd*x(1); y(2,1) =
Ycr*x(2)*(Krc*x(1) - Km);
Sustained oscillation occurs with no decay in this case, as
shown in Fig. 3c.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.13
_____________________________________________________________________________
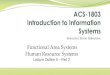
Figure 3b below presents historical data over a 90-year period
for the number of lynx and snowshoe hare pelts received by the
Hudson Bay Company. The actual data are of course less uniform than
the simulation results due to factors not in the model such as
variations in the weather, variations in the numbers of hunters
etc. However, the same overall trendsstrongly oscillating
populations with peaks every 10 years and the peaks in lynx
population following the peaks in hare populationare exhibited by
both the model and the data.
Figure 3b.
If you are a consumer, the down-slopes in those oscillations are
undesirable, and good resource management policies often are
intended to avoid such oscillations; to keep the system at a stable
steady state. Although you now have the ability to try any system
model and see from a simulation
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
4
5
6x 104
time (years)
Figure 3c. Simulated populations with non self-limited resource
regeneration
Prey Predator
Population
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.14
_____________________________________________________________________________
whether it oscillates, a direct calculation that shows what
system parameter values will lead to a stable steady state, and
what values will lead to oscillation, can be useful in design and
policy making. The frequency-domain techniques that will be
developed in the second half of this course can be used to
determine whether or not a system will have a stable steady-state
operating point, or will oscillate. Example 4. Considering more
variables. Although the downslopes in an oscillation are
undesirable for consumers, in the systems we have seen so far, the
population eventually recovers. Unfortunately, that is not the case
for all types of systems. In the homework, you will consider a
system of plants (the resource) and consumers, similar to what we
have modeled, analyzed, and simulated above, but in which there is
the possibility of soil erosion as well. To model this, we can use
three state variables: S, the amount of soil (it could also
represent the amount of a particular nutrient in the soil), and R
and C as before. The model for consumers is unchanged, but the
growth rate of plants is depends on the soil. Once there is enough
soil, more soil doesnt help, so there is a saturation effect for
soil as well as for R:
rg = satsat
g,
S + SS
R + kRr max
Now we need a model for soil. Its erosion rate is retarded by
the presence of plants. We could model it as simply inversely
proportional to R, but we dont expect the erosion rate to be
infinite in the absence of plants, so we can modify that idea as
follows:
re = x
eR + k
Sk
where ke is an erosion constant and kx is the threshold level of
plant matter (R) below which further decreases in R dont speed
erosion much. If we also assume soil growth is proportional to the
amount of plant matter (some of which dies, decays, and enriches
and adds to the soil),
x
es R + k
SkRkdtdS
= .
You will explore the implication of this in the homework.
Example 5. Resource Management. Fisheries are subject to
oscillations due to the same underlying factors that give rise to
the oscillations in the preceding examples. Indeed, same
simulations can equally well be for the oscillations in the
population of fish (R) in relation to the number of fishing boats
(C), assuming that the number of the fishing boats increases when
the fish are plentiful and decreases when the fish are not. It
would be desirable to avoid such oscillations since they are
accompanied by economic hardship for fisherman and can put the
entire fish population at risk (e.g. if some random challenge to
the fish population occurs when population levels are already
low).
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.15
_____________________________________________________________________________
What if the number of boats is to be determined by the number of
licenses issued rather than as a response to the widely fluctuating
fish population? We will examine this situation by looking at the
dynamics of the fish population, the steady-state harvest, and the
harvest per boat per year with the number of boats fixed at various
levels. Changing the model used to generate the output shown in
Figure 3a so that B is at a fixed level we obtain:
function y = dXdt(t,x) %x(1) = R % Lee Lynd rgmax = 750e3; %
fish/yr ksat = 500e3; % fish kd = 0.1; %1/yr krc = 0.15e-3;
%fish/(boat*fish*year) B = 500; %Number of fishing licenses (boats)
issued rg = rgmax*x(1)/(x(1) + Ksat); y(1,1) = rg - Krc*x(1)*B -
Kd*x(1);
Results when this mfile is used with ode45 to simulate the
system with initial conditions R(0) = 1000 are plotted in Figure 5a
below.
The steady-state fish population with 500 boats is 3.8
million.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
3.5
4 x 10 6
time (years)
Figure 5a. Simulated fish populations, 500 boats
Fish Population
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.16
_____________________________________________________________________________
If we now change to 1000 boats, we have the situation shown in
Figure 5b, with a steady-state fish population of 2.5 million.
This can be repeated for different numbers of boats, but running
many simulations is not necessary in this case, because we can
easily do a little bit of simple math, involve no solutions of
differential equations, and find the steady-state values. All we
have to do is set the derivative equal to zero:
RRB - k - kR + k
Rr =
dtdR
dRCsat
R,max0=
Dividing by R results in
dRCsat
R, B - k - kR + k
r = max0
which can be solved for the stead-state value of R, Rss, to
obtain
satdRC
R,ss - k kB k
rR
+= max [5.1]
As consumers, we might care more about the total number of fish
caught be year, rather than the number of fish in the population.
That is simply
ssRC BRkcatchAnnual = [5.2]
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5 x 10 6
time (years)
Figure 5b. Simulated fish populations, 1000 boats
Fish Population
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.17
_____________________________________________________________________________
We can plot [5.1] and [5.2] with basic MATLAB commandsno
differential equation solvers like ode45 are needed. The result is
shown in Figure 5c.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Number of boats
fish
[see
lege
nd]
Fish Population, tens of millionsAnnual catch, millions
Figure 5c. Fish population and annual catch as a function of
number of boats,
computed analytically from steady-state solution. Code for this
plot is on the following page. We see that the harvest goes through
a maximum at about 2000 boats (1915, to be exact). Both the numbers
of fish and the number of fish per boat decline with increasing
number of boats. It is reasonable to expect there to be some
minimum threshold of boats/fish that would determine economic
viability. A more extensive model could add other factors such as
the price of fish. If we use the same model, but allow the number
of boats to fluctuate in response to the fish supply, oscillations
in the number of boats and in the fish population result. Instead
of a constant 1.4 million fish, (as with the optimum number of
boats, above), we get a maximum fish population of 55,000 and much
lower average and minimum values. Thus we see that by fixing the
number of boats we accomplish: 1) elimination of fluctuations in
fish population, boats, and harvest; and 2) an increase in the size
of the fish population by over 20-fold. The dynamic behavior
indicated by our model has in fact been observed in real life, as
recounted in the article A Tale of Two Fisheries available as a
handout separate from this one. This August 2000 New York Times
article contrasts the decline of lobster and tuna fisheries in
Point Judith Rhode Island with the thriving fisheries of Port
Lincoln Australia.
-
Engineering Sciences 22 Lumped Analysis of Resource Systems
Summer, 03 p.18
_____________________________________________________________________________
%HW 8 p 2, engs22 01X % C. Sullivan % Plot steady state solution
for fish population and number of fish rgmax = 750e3; % fish/yr
ksat = 500e3; % fish kd = 0.1; %1/yr krc = 0.15e-3;
%fish/(boat*fish*year) B = linspace(0,10000); R = rgmax./(kd+krc*B)
-ksat; catchn = krc*R.*B; plot(B,R/10e6,B,catchn/1e6,'--') big(16)
xlabel('Number of boats') ylabel('fish [see legend]') legend('Fish
Population, tens of millions','Annual catch, millions') grid