Embed Size (px)
Citation preview

'
&
$
%
Research
Fuzzy Inference System based on Boolean andKleenean relations with Convex CombinerSistema de Inferencia Difusa basado en Relaciones Booleanas yKleeneanas con Combinador ConvexoJuan D. Chacon1, Jairo Soriano1, Omar Salazar*,1
1Universidad Distrital Francisco Jose de Caldas*Correspondence: [email protected]
Recibido: 19-12-2016. Modificado: 21-03-2017. Aceptado: 02-05-2017.
'
&
$
%
Abstract
Context: In the design process of Fuzzy Inference Systems based on Boolean and Kleenean Relations(FIS-BKR) there is a dilemma choosing the regular kleenean extensions of a given boolean function.The set of possible kleenean extensions of a boolean function has a lattice structure under the usual par-tial order of functions. The fuzzy convex combination proposed by Zadeh guarantees some propertiesrelated to this order.
Method: The addition of a convex combiner just before the defuzzifier offers a solution to the abovesituation. The ISE (Integral Squared Error) and ITSE (Integral Time-weighted Squared Error) perfor-mance indexes were used on an application for tuning a liquid level control system.
Results: The tuning process carried out on the FIS-BKR controller with fuzzy convex combiner usingconstant coefficients, implied an improvement of the controlled system up to 1.427% for ISE index andup to 21.99% for ITSE with respect to the extreme extensions.
Conclusions: New evidence of convenient characteristics of FIS-BKR controllers with fuzzy convexcombiner was presented when the performance indexes ISE and ITSE were evaluated. On the otherhand, although in this work parameter tuning for convex combination was done by grid search (bruteforce), it would be interesting to study more effective optimization methods for this purpose.
Keywords: Fuzzy convex combiner, Level control, Fuzzy control, ISE performance index, ITSE per-formance index.
Acknowledgments: The authors would like to thank to the Laboratory for Automation and Computa-tional Intelligence (LAMIC) for all its contributions to this paper.
Language: Spanish.
�
�
�
�Cite this work as J. D. Chacon, J. Soriano, O. Salazar, “Fuzzy Inference System based on Boolean and KleeneanRelations with Convex Combine”, Ingenierıa, vol. 23, no.1, pp. 7-30, 2018.c© The authors; reproduction right holder Universidad Distrital Francisco Jose de Caldas.
DOI: https://doi.org/10.14483/23448393.11138
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 7

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
'
&
$
%
Resumen
Contexto: En el proceso de diseno de sistemas de control difuso basados en relaciones booleanaso kleeneanas (FIS-BKR, por sus siglas en ingles) existe una clara disyuntiva a la hora de elegir lasextensiones kleeneanas regulares de una funcion booleana dada. El conjunto de posibles extensioneskleeneanas de una funcion booleana tiene estructura reticular bajo el orden parcial usual de funciones.La combinacion convexa difusa propuesta por Zadeh garantiza ciertas propiedades relacionadas coneste orden.Metodo: La adicion de un combinador convexo antes del defusificador ofrece una solucion a estasituacion. Los ındices de desempeno ISE (Integral Squared Error) e ITSE (Integral Time-weightedSquared Error) son usados en la sintonizacion de un sistema de control de nivel de lıquido en un tanquecilındrico.Resultados: El proceso de sintonizacion llevado a cabo en el controlador de nivel tipo FIS-BKRcon combinador convexo difuso usando coeficientes constantes implico una mejora en la respuesta delsistema controlado de hasta el 1.427% para el ISE y de hasta el 21.99% para el ITSE con respecto aldesempeno de las extensiones extremas.Conclusiones: Se presentaron nuevas evidencias de las caracterısticas favorables de controladores FIS-BKR con combinador convexo difuso cuando se evaluaron los ındices de desempeno ISE e ITSE. Porotro lado, teniendo en cuenta que la sintonizacion de los parametros de combinacion convexa se realizomediante busqueda exhaustiva, como trabajo futuro valdrıa la pena explorar tecnicas de optimizacionmas eficientes.Palabras clave: Combinador convexo difuso, Control de nivel, Control difuso, Criterio ISE, CriterioITSE.Agradecimientos: Los autores quieren agradecer al grupo de investigacion LAMIC (Laboratorio deAutomatica e Inteligencia Computacional) por sus contribuciones en lo relacionado a este artıculo.Idioma: Espanol
1. Introduccion1
Los automatismos basados en logica booleana (tambien llamada clasica o bivalente) han sido am-pliamente utilizados para controlar distintos fenomenos, por ejemplo, temperatura, nivel, caudaly otros [2]. Estos cuentan con principios basicos de diseno (como tablas de verdad), y tecnicasde simplificacion (mapas de Karnaugh, por ejemplo) que ayudan a su rapido planteamiento, facilaplicacion y bajo costo computacional. Sin embargo, presentan serios inconvenientes a causa de lanaturaleza discontinua de la accion de control sobre los fenomenos sobre los que operan.
Buscando mejorar este comportamiento Soriano et. al. [3] propusieron el reemplazo de la logicabooleana por la logica difusa en el diseno de automatismos. Esto derivo en un nuevo esquema deinferencia difusa con claras diferencias sobre el esquema clasico propuesto por Mamdani y As-
1Nota aclaratoria: el presente documento hace una extension del artıculo [1], el cual fue socializado por los mis-mos autores en el marco del Congreso Mundial en Inteligencia Computacional (WCCI 2016) de IEEE. El presentemanuscrito exhibe una aplicacion original de los controladores FIS-BKR con combinador convexo, mostrando nuevaevidencia de la pertinencia de la tecnica cuando se usan ındices de desempeno ISE e ITSE. Por otro lado, tambienincluye una reflexion sobre la cardinalidad del conjunto de funciones extension de una funcion booleana dada y laventaja que ofrece la tecnica en este sentido.
8 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
silian [4]. Desde ese entonces han aparecido varias aplicaciones: control de temperatura, controlde nivel, control en procesos quımicos, control de velocidad de un motor, control de actitud deun satelite, control en conversores DC-DC, identificacion de sistemas no lineales, identificacion deseries de tiempo, identificacion de personas, mapas cognitivos difusos, y ademas estudios teoricoscon el fin de consolidar las bases de este sistema de inferencia difusa. Entre estas contribucionesse destaca la realizada por Salazar et. al. [5], que presenta un metodo para extender funcionesbooleanas (o de logica clasica) a funciones regulares2 kleeneanas (o de logica trivalente de Kleene).Tema con ciertas consecuencias teoricas que son precisamente el punto de partida de este trabajo.
Una de las ventajas de trabajar con funciones kleeneanas para el diseno de controladores difusosesta en el hecho de que esta metodologıa permite proponer bases de reglas en forma de tablas deverdad finitas de tres elementos, que pueden ser representadas mediante formulas logicas faciles decomputar, similar a como se hace en el diseno de automatismos booleanos. La metodologıa para eldiseno y optimizacion de sistemas de control difuso basados en relaciones booleanas y kleeneanas(FIS-BKR) fue presentada en [7]. Dicha metodologıa hace amplio uso de la extension de funcionesbooleanas a kleeneanas regulares. Sin embargo, la forma de extender una funcion booleana a unakleeneana regular no es unica. Esto en ocasiones convierte el proceso de diseno en un reto debidoa que la cantidad de extensiones puede ser enorme e inmanejable. La eleccion de una extensionregular adecuada para una aplicacion particular requiere ciertos criterios de ingenierıa.
La propuesta sobre la que se basa este artıculo fue introducida en [1]. Se usa la estructura retic-ular de las funciones kleeneanas que son extensiones regulares de una funcion booleana dada yla combinacion convexa difusa introducida por Zadeh [8]. Esta metodologıa de diseno cambia elpanorama de la optimizacion de un problema discreto sobre un conjunto finito a uno continuo enun conjunto infinito.
En este artıculo se presenta una aplicacion al control de nivel de un sistema hidraulico compuestopor un tanque cilındrico horizontal. Problema que fue trabajado en [9]–[12]. Los ındices de de-sempeno que se trabajaron son el ISE (Integral Squared Error) e ITSE (Integral Time-weightedSquared Error) los cuales fueron minimizados en cierto espacio de parametros relacionados con loscoeficientes de la combinacion convexa difusa. El control con dicha tecnica implico una mejoraen la respuesta del sistema controlado de hasta el 1.427% para el ISE y de hasta 21.99% para elITSE con respecto al desempeno de las extensiones extremas. Se evidencio la aparicion de nuevospuntos de operacion que ayudaran al disenador, y creemos presentan importantes propiedades parafuturas aplicaciones.
Consideramos que esta metodologıa, aparte de simplificar el proceso de diseno, capta la natu-raleza de los sistemas de inferencia basados en relaciones algebraicas. Sin embargo, tareas rela-cionadas con la optimizacion de parametros quedan abiertas, y seran clave a la hora de buscar unmodelo mas completo de este tipo de controladores.
2La regularidad de las funciones kleeneanas, estudiada por Mukaidono [6], es condicion necesaria y suficiente paraque estas funciones puedan ser expresadas por formulas logicas.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 9

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
Este documento esta divido en tres grandes partes. En la primera se presentan algunos prelim-inares sobre funciones logicas ası como de controladores FIS-BKR y su metodologıa de diseno. Enla segunda se presenta la propuesta sobre el controlador FIS-BKR con combinador convexo. En latercera parte se exhibe una aplicacion de control de nivel en un tanque cilındrico, donde se realizaun proceso de sintonizacion y se presentan los resultados. El documento concluye con una seccionde conclusiones.
2. Preliminares
Definicion 1 (Logica trivalente de Kleene). Se denotara por K el algebra de valores de verdad〈K = {0, 1/2, 1} ;∨,∧,′ , 0, 1〉, con el orden usual para sus elementos (0 < 1/2 < 1), donde lasoperaciones disyuncion (∨) y conjuncion (∧) entre a, b ∈ K estan dadas por a ∨ b = max {a, b}y a ∧ b = min {a, b}. El complemento (′) de a ∈ K es a′ = 1 − a. Tambien se identificara elelemento 1/2 con la letra u. En la Tabla I(b) se muestran estas operaciones logicas actuando sobreK.
Definicion 2 (Logica bivalente de Boole). La restriccion de K al conjunto B = {0, 1} se conocecomo logica bivalente de Boole (logica clasica o logica booleana) y se denota con la letra B. En laTabla I(a) se muestran las operaciones logicas actuando sobre B.
Tabla I. (a) Operaciones logicas disyuncion (∨), conjuncion (∧) y complemento (′) en logica bivalente de Boole. (b)Operaciones logicas disyuncion (∨), conjuncion (∧) y complemento (′) en logica trivalente de Kleene.
(a)∨ 0 10 0 11 1 1
∧ 0 10 0 01 0 1
′
0 11 0
(b)∨ 0 u 10 0 u 1u u u 11 1 1 1
∧ 0 u 10 0 0 0u 0 u u1 0 u 1
′
0 1u u1 0
Definicion 3 (Logica difusa estandar). Se denotara por I el algebra de valores de verdad con-formada por 〈I = [0, 1] ;∨,∧,′ , 0, 1〉, con el orden usual para sus elementos, donde las opera-ciones disyuncion (∨) y conjuncion (∧) entre a, b ∈ I estan dadas por a ∨ b = max {a, b} ya ∧ b = min {a, b}. El complemento (′) de a ∈ I es a′ = 1− a.
Observacion 1. AunqueK e I no estan definidas sobre los mismos conjuntos de valores de verdad,K e I tienen la misma logica proposicional [13], es decir, sus proposiciones logicas son las mismas.Como consecuencia, K permite la elaboracion de tablas de verdad y obtencion de formulas logicaspara I, lo cual serıa imposible para esta ultima debido a su caracter infinito.
Definicion 4 (Funciones de logica bivalente, trivalente y multivalente). Una funcion f de n vari-ables se dice funcion de logica bivalente (FLB) (o funcion booleana) si es una aplicacion de Bn aB, se dice funcion de logica trivalente (FLT) (o funcion kleeneana) si es una aplicacion de Kn aK, y se dice funcion de logica multivalente (FLM) si es una aplicacion de In a I .
Observacion 2. Una caracterizacion de funciones kleenanas desde un punto de vista mas generalse encuentra en [14]. Para el proposito de este artıculo, una funcion kleeneana es una aplicacion deKn a K.
10 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
Definicion 5 (Formulas bien formadas). Sea V un conjunto finito de variables. Dadas las con-stantes 0, u y 1, y los sımbolos ∧, ∨ y ′, el conjunto de formulas bien formadas F esta definidorecursivamente como:
1. 0, 1, u ∈ F y si x ∈ V entonces x ∈ F .
2. Si f ∈ F y g ∈ F entonces f ∧ g ∈ F , f ∨ g ∈ F y f ′ ∈ F .
Los elementos de F son llamados formulas bien formadas, formulas logicas o simplemente formu-las.
Es conocido que toda FLB es representable a traves de una formula que no involucra la constanteu en ella. Esto es consecuencia del teorema de expansion de Boole. Sin embargo, esto no siemprees cierto para las FLT. Una clase importante de FLT, llamadas regulares, son aquellas que puedenser representadas por formulas.
Definicion 6. Se define sobre K el siguiente orden parcial3: 0 �a u, 1 �a u, y a �a a para todoa ∈ K. La relacion �a no compara 0 y 1. Esta relacion es extendida a Kn como sigue: Seana = (a1, . . . , an) ,b = (b1, . . . , bn) ∈ Kn, entonces a �a b si, y solo si, ai �a bi para todoi = 1, 2, . . . , n.
Definicion 7 (Regularidad). Sea f : Kn → K una FLT. f se dice regular si, y solo si, f(a) ∈ B ={0, 1} implica f(a) = f(b) para todo b �a a.
Mukaidono [6] demostro que la regularidad es condicion necesaria y suficiente para que una FLTsea representable a traves de una formula. En esencia, este autor mostro que el conjunto F y elconjunto de las FLT regulares (FLTR) es el mismo. Dado que una FLB (o FLTR) puede tener masde una formula, entonces cada FLB (o FLTR) se identificara con su formula canonica, tambienllamada forma normal4.
Ahora, dada una tabla de verdad asociada a una FLB (o FLTR) es de interes conocer su formanormal (conjuntiva y/o disyuntiva). El siguiente procedimiento tomado y adaptado de [13] se usapara este fin. En [13], [15]–[17] se probo la existencia y unicidad de las formas normales.
Metodo 1 (Forma normal disyuntiva [13]). 1. Para las filas que tienen valor 1 en la columnade f que debe ser puesta en su forma normal disyuntiva: Formar la conjuncion de las vari-ables que tienen valor 1 con los complementos de las variables que tienen valor 0 (omitir lasvariables que tienen valor u).
2. Para las filas que tienen valor u en la columna de f que debe ser puesta en su forma normaldisyuntiva: Formar la conjuncion de las variables que tienen valor 1 con los complementos delas variables que tienen valor 0 y la conjuncion tanto de la variable como de su complementopara las que tienen valor u.
3Mukaidono [6] llama ambiguedad a la relacion �a.4En el conjunto F dos formulas son equivalentes si, y solo si, representan la misma funcion. Esto define una relacion
de equivalencia sobre F . Una forma normal (o canonica) es un representante de cada clase de equivalencia [13], [15]–[17].
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 11

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
3. Formar la disyuncion de las conjunciones obtenidas en los dos pasos anteriores. En casode no existir conjunciones se obtendra una disyuncion vacıa que representa la forma normaldisyuntiva para 0.
La forma normal disyuntiva kleeneana de f , denotada FNDK(f), se obtiene al descartar conjun-ciones que tienen los mismos (o posiblemente mas) literales que otras conjunciones.
Observacion 3. La forma normal disyuntiva booleana de f , denotada FNDB(f), se obtiene sigu-iendo los pasos 1 y 3 del Metodo 1, teniendo en cuenta el valor de f solo en la filas de la tabla deverdad donde aparecen unos y ceros exclusivamente.
Observacion 4. Las correspondientes formas normales conjuntivas (kleeneana y booleana), de-notadas FNCK(f) y FNCB(f) respectivamente, se obtienen del Metodo 1 intercambiando laspalabras conjuncion por disyuncion, disyuncion por conjuncion, ceros por unos, y unos por ceros.
Una forma de obtener formulas en I es por medio de K (debido a la igualdad de sus logicasproposicionales [13]). Dado que B es una restriccion de K, una manera de lograr lo anterior espartir de una FLB f , luego extender f a una FLTR g, y posteriormente encontrar una formula parag. La formula encontrada para g en K es la misma que en I, sin embargo, esta formula en I esuna FLM. En [5] se propuso el Metodo 2 para extender una FLB a una (o mas) FLTR. De acuerdoa [5, Teorema 3.1], dada f una FLB el Metodo 2 garantiza que siempre es posible encontrar a lomenos una FLTR g que es extension de f , pero no necesariamente unica.
Definicion 8. Sea β : Kn → N : a → β(a), donde N = {0, 1, 2, . . . , n}, definida5 como elnumero total de u en a ∈ Kn.
Metodo 2 (Extension [5]). 1. Dada una FLB f : Bn → B de n variables x1, . . . , xn construiruna tabla de verdad de 2n filas y n+1 columnas (n columnas para x1, . . . , xn y 1 columna paraf ). Estas filas tendran las 2n combinaciones de valores para x1, . . . , xn y los correspondientesvalores para f (los cuales son representados como fi ∈ B, i = 0, 1, . . . , 2n − 1) como semuestra en la Tabla II(a).
2. A la tabla elaborada en el numeral 1, agregar 3n − 2n nuevas filas. Primero aquellas(n1
)2n−1
filas cuya combinacion de valores de las variables tienen solamente una u (nivel de am-biguedad β = 1), enseguida aquellas
(n2
)2n−2 filas cuya combinacion de valores de las vari-
ables tienen dos u (nivel de ambiguedad β = 2), y ası sucesivamente. Al final, la tablafinaliza con aquella
(nn
)2n−n = 1 fila que tiene n valores u en la combinacion de valores de
sus variables (nivel de ambiguedad β = n), como se muestra en Tabla II(b). Cada grupo defilas agregado previamente es separado por una lınea horizontal que representa la separacionentre diferentes niveles de ambiguedad β. El nivel de ambiguedad es creciente.
3. Hacer gi = fi para i = 0, 1, 2, . . . , 2n − 1.
4. Para cada grupo con nivel de ambiguedad β = 1, 2, . . . , n hacer lo siguiente:
(a) Para la j-esima fila considerada dentro del grupo con nivel de ambiguedad β, con j =1, 2, . . . ,
(nβ
)2n−β , encontrar aquellas 2β filas en el grupo inmediatamente previo con
5El valor β(a) ∈ N se conoce como el nivel de ambiguedad de a [5, Definicion 2.6]. Por ejemplo, si a,b ∈ K4 talque a = (0, u, u, 1) y b = (0, 1, 0, 1), entonces β(a) = 2 y β(b) = 0, es decir, a tiene dos u y b tiene cero u.
12 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
Tabla II. (a) FLB inicial f : Bn → B dada como una tabla de verdad. (b) FsLTR g : Kn → K (extensiones de f )dadas como tabla de verdad.
(a)x1 x2 · · · xn f
2n
filas
0 0 · · · 0 f00 0 · · · 1 f1...
.... . .
......
1 1 · · · 1 f2n−1
(b)β x1 x2 · · · xn g
2n
filas
0
0 0 · · · 0 g0 = f00 0 · · · 1 g1 = f1...
.... . .
......
1 1 · · · 1 g2n−1 = f2n−1
( n 1
) 2n−1
filas
1
u 0 · · · 0 g2n
u 0 · · · 1 g2n+1
......
. . ....
...1 1 · · · u
( n 2
) 2n−2
filas
2
u u · · · 0u u · · · 1...
.... . .
......
1 1 · · · u...
......
......
......
1fil
a n u u · · · u g3n−1
nivel de ambiguedad β − 1 cambiando uno por uno cada u por 0 y 1 sobre la j-esimafila. Estas 2β filas son inmediatamente menos o igual de ambiguas que la j-esima filade acuerdo a la relacion �a definida sobre K y extendida sobre Kn (Definicion 6).
(b) Para cada una de las 2β filas encontradas en el numeral 4a, encontrar el conjunto devalores mas o igual de ambiguos al respectivo valor g de esa fila. Escribir este conjuntoen una columna separada.
(c) El conjunto de valores que g puede tomar sobre la j-esima fila considerada es la inter-seccion de aquellos conjuntos encontrados en el numeral 4b. Si g puede tomar mas deun valor, crear tantas nuevas columnas para nuevas funciones g como sea posible. Paracada g creada, repetir el numeral 4.
Como se menciono anteriormente, la forma de extender una FLB a una FLTR no es unica. Si f esuna FLB y Ef = {fi}i=1,2,...,L es el conjunto de todas las FLTR que son extension de f , entoncesEf ordenado en el sentido de la Definicion 9 forma una estructura de retıculo [1] con mınimo ymaximo. El conjunto Ef es finito dado que L ≤ 33
n , donde n es el numero de variables de f .
Definicion 9. Sea f una FLB y sean g y h dos FLTR que son extension de f . Se dira que g esmenor o igual que h, denotado g � h, si y solo si, g(x) ≤ h(x) para todo x en el dominio de g y h.
Definicion 10 (Funciones extremas). Sean f una FLB y Ef = {fi}i=1,2,...,L el conjunto de todas lasFLTR que son extensiones de f . Se denotara por fM a la extension maxima en Ef tal que fi � fMpara toda i = 1, 2, . . . , L y similarmente por fm a la extension mınima en Ef tal que fm � fi parai = 1, 2, . . . , L.
Por definicion fM =∨Li=1 fi y fm =
∧Li=1 fi. Si L es grande (y tambien desconocido a priori)
las anteriores expresiones pueden ser poco utiles para su calculo. La siguiente proposicion, de-mostrada en [1], da expresiones simples para fM y fm que no requieren del conocimiento previode la totalidad de extensiones.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 13

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
Proposicion 1. [1] Sea f una FLB. La forma normal conjuntiva booleana de f es igual a fM y laforma normal disyuntiva booleana de f es igual a fm.
Las formulas correspondientes para fM y fm sobre logica difusa son FLM. Estas dos FLM puedenser operadas a traves de combinacion convexa (Definicion 11) para obtener otras FLM, en partic-ular, todas las extensiones en Ef vıa la Proposicion 2. La siguiente es una definicion general dadapor Zadeh [8].
Definicion 11 (Combinacion convexa). [8] Sean f : X → I , g : X → I y λ : X → I funcionesdefinidas sobre un conjunto X no vacıo. La combinacion convexa de f y g con coeficiente λ,denotada por 〈f, g;λ〉, es una funcion 〈f, g;λ〉 : X → I dada por
〈f, g;λ〉 (x) = λ(x)f(x) + (1− λ(x))g(x), x ∈ X.
Proposicion 2. [18], [19] Sean f : X → I , g : X → I y h : X → I funciones definidas sobre X .Entonces f ∧ g � h � f ∨ g si, y solo si, existe λ : X → I tal que h = 〈f, g;λ〉.
La Proposicion 2 aplicada a fM y fm, las extensiones maxima y mınima del conjunto Ef ={fi}i=1,2,...,L, tomando X = In lleva a fm ∧ fM = fm � fi � fM = fm ∨ fM si, y solo si, existeλi : X → I tal que fi = 〈fm, fM ;λi〉, i = 1, 2, . . . , L. Entonces todas las extensiones regularesde una FLB pueden ser obtenidas vıa combinacion convexa. Ademas, con otras elecciones de λtambien se pueden obtener otras FLM entre fm y fM que no estan en Ef .
3. Sistema de inferencia difusa basado en relaciones booleanasy kleeneanas (FIS-BKR)
El sistema de inferencia difusa basado en relaciones6 booleanas y kleeneanas (Fuzzy InferenceSystem based on Boolean and Kleenean Relations (FIS-BKR)) fue propuesto por primera vez enel ano 2001 por Soriano et. al. [3]. La propuesta original ha sido ampliada considerablemente trascasi 16 anos de investigacion continua y varios nombres han aparecido con el tiempo. La Figura 1muestra el diagrama de bloques actual. A continuacion se presenta el metodo de diseno propuestoen [7].
Fusificador El fusificador usado es unitario (o singleton en ingles). Para un x∗ dado, el con-junto difuso unitario A (singleton) a la salida del fusificador esta definido por la funcion depertenencia:
µA(x) =
{1, x = x∗,
0, x 6= x∗,
donde x = (x1, . . . , xn) ∈ X es el vector de variables de entrada, x∗ = (x∗1, . . . , x∗n) ∈ X es
un valor particular tomado en la entrada del fusificador y X = X1 × · · · × Xn ⊆ Rn es eluniverso de entrada.
6La palabra relacion usada originalmente por Soriano et. al. [3] (y conservada hasta la actualidad) siempre ha sidousada como sinonimo de la palabra formula. Nunca ha tomado el significado clasico de las matematicas como unsubconjunto del producto cartesiano de conjuntos. Por razones historicas se ha conservado esta palabra queriendodecir que se trata de un modelo basado en formulas.
14 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
Base de reglas
Motor
“si...entonces...”
Fusificador Defusificador
x ∈ X
Concresor
y ∈ Y
de
inferencia
Figura 1. Sistema de inferencia difusa basado en relaciones booleanas y kleeneanas (FIS-BKR). Tomado de [7]
Base de reglas Para la j-esima salida yj (j = 1, 2, . . . ,m) del vector de salidas y ∈ Y , dondey = (y1, . . . , ym) y Y = Y1 × · · · × Ym ⊆ Rm, una regla tıpica de la base de reglas lucecomo:
Si x1 (no) es A1 y/o · · · y/o xn (no) es An entonces yj (no) es B,
donde Ai (i = 1, 2, . . . , n) es uno de los posibles conjuntos difusos formulados sobre el i-esimo universo de entrada Xi y B es uno de los posibles conjuntos difusos formulados sobreel j-esimo universo de salida Yj .
(a)
(b)
Figura 2. (a) Ejemplo de formulacion de conjuntos difusos en el i-esimo universo de entrada Xi (i = 1, 2, . . . , n). Semuestra la funcion de pertenencia de uno de los conjuntos difusos A. (b) Ejemplo de formulacion de conjuntos difusosen el j-esimo universo de salida Yj (j = 1, 2, . . . ,m). Se muestra la funcion de pertenencia de uno de los conjuntosdifusos B con su valor caracterıstico v ∈ Yj llamado actuador virtual.
Las operaciones logicas “y”, “o” y “no” son las dadas por la logica difusa estandar7 y/o logicabooleana. La formulacion de los conjuntos difusos sobre cada universo de entrada y salida
7Es conocido que cualquier operacion logica difusa (tipo-1) siempre se reduce a la correspondiente de la logicabooleana cuando el conjunto de valores de verdad I es cambiado por B. Ademas, por simplicidad en la explicacion,en este artıculo se usa la operacion de complemento estandar a′ = 1− a, a ∈ I , en la logica difusa. Sin embargo, estaoperacion puede ser cambiada por cualquiera que sea monotona decreciente e involutiva sin alterar significativamentelo que se dice en este documento. Ver [7] para mas detalles.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 15

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
puede seguir algun criterio (Figura 2(a) y Figura 2(b)), por ejemplo, puede obedecer a ladefinicion de particion difusa [17, def. 7.4.1]. Ademas, cada conjunto difuso B formuladosobre el j-esimo universo de salida Yj ⊆ R debe tener un unico valor caracterıstico v ∈ Yjllamado actuador virtual.
Motor de inferencia El diseno del motor de inferencia se realiza en dos etapas:
1. En la primera se hace una aproximacion a traves de logica booleana,
2. y en la segunda se hace una extension a la logica difusa estandar a traves de logicatrivalente.
A continuacion se explican los pasos a seguir en cada etapa.
Etapa 1: Aproximacion a traves de logica booleana
1. Aproximacion de conjuntos difusos mediante conjuntos bivalentes Todos los con-juntos de los antecedentes de las reglas son aproximados mediante conjuntos biva-lentes, esto es, si A es uno de los posibles conjuntos difusos formulados sobre el i-esimo universo de entrada Xi ⊆ R (i = 1, 2, . . . , n), entonces este conjunto es aproxi-mado mediante un conjunto bivalente A con funcion de pertenencia bivalente (es decir,µA ∈ {0, 1}).
2. Codificacion bivalente de las regiones aproximadas de operacion Cada conjuntobivalente A formulado en el paso anterior realiza una particion del universo de entradaXi (i = 1, 2, . . . , n) en la siguiente forma:
(a) Codificacion con 0: para aquellos xi ∈ Xi tales que µA(xi) = 0 y(b) Codificacion con 1: para aquellos xi ∈ Xi tales que µA(xi) = 1.
En este paso es posible realizar una codificacion bivalente de todas las posibles regionesaproximadas de operacion8 mediante una tabla de verdad de logica bivalente (ceros yunos), basados en la particion descrita anteriormente. Cada codificacion corresponderaa una fila de la tabla. Si despues de codificar todas las posibles regiones aproximadas deoperacion aun existen codigos por asignar, estos codigos son tratados como condicionesno importa.
3. Asignacion de las acciones del sistema en las regiones aproximadas de operacionSobre la tabla de verdad del paso anterior, crear una funcion booleana f por cada actu-ador virtual v ∈ Yj (j = 1, 2, . . . ,m) perteneciente a cada conjunto difusoB formuladosobre el j-esimo universo de salida Yj ⊆ R. El valor de f ∈ {0, 1} en la respectiva cod-ificacion (fila de la tabla) dependera de la accion que tomara el sistema en la respectivaregion aproximada de operacion. Cada funcion f es llamada salida de activacion (delrespectivo actuador virtual v) y correspondera con una columna de la tabla. Sobre lasfilas de la tabla consideradas como condiciones no importa el valor de f es arbitrario ypuede ser elegido con algun criterio dado por el disenador.
8Una region de operacion es un subconjunto del universo de entrada X = X1 × · · · ×Xn ⊆ Rn.
16 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
4. Obtencion de formulas Para cada funcion booleana f creada en el paso anterior obtenersu forma normal (disyuntiva o conjuntiva) booleana, donde las variables de dicha formulason las funciones de pertenencia de cada conjunto bivalente.
5. Simplificacion (optimizacion) de formulas Para cada formula obtenida en el paso an-terior aplicar la version de logica booleana del metodo de simplificacion9 (optimizacion)de formulas propuesto en [20].
Etapa 2: Extension a la logica difusa mediante logica trivalente de Kleene
1. Retrosustitucion de conjuntos difusos Todos los conjuntos bivalentes A usados comoaproximacion en la primera etapa son nuevamente sustituidos por los originales con-juntos difusos A. Las funciones de pertenencia de estos ultimos son multivalentes (esdecir, µA ∈ [0, 1]).
2. Codificacion trivalente de las regiones de operacion Dado un ε ∈ [0, 1] definido porel disenador, tal que 0 < ε ≤ ξ, donde ξ es el punto fijo10 de la operacion logica “no”(o complemento (′)), cada conjunto difuso A formulado en el paso anterior realiza unaparticion del universo de entrada Xi en la siguiente forma:
(a) Codificacion con 0: para aquellos xi ∈ Xi tales que µA(xi) ∈ [0, ε),(b) Codificacion con u: para aquellos xi ∈ Xi tales que µA(xi) ∈ [ε, ε′] y(c) Codificacion con 1: para aquellos xi ∈ Xi tales que µA(xi) ∈ (ε′, 1].
En este paso es posible realizar una codificacion trivalente de todas las posibles regionesde operacion mediante una tabla de verdad de logica trivalente (0, u y 1), basadosen la particion descrita anteriormente. Cada codificacion correspondera con una filade la tabla. Esta codificacion trivalente debe preservar en su totalidad la codificacionbivalente obtenida en la primera etapa. De esta forma la tabla de verdad de logicatrivalente es una extension de la correspondiente de logica bivalente.
3. Extension a la logica difusa (por medio de la logica trivalente de Kleene) Usar elmetodo de extension (Metodo 2) para extender cada funcion booleana f (salidas deactivacion) obtenida en la primera etapa a una (o varias) funciones kleeneanas regularesf .
4. Seleccion de las extensiones regulares adecuadas Por cada funcion booleana f obtenidaen la primera etapa, seleccionar una funcion kleeneana regular f (de las varias exis-tentes) encontradas en el paso anterior. Esta seleccion puede hacerse con algun criterioque depende de la aplicacion.
5. Obtencion de formulas logicas difusas Para cada funcion kleeneana regular f selec-cionada en el paso anterior obtener su forma normal (disyuntiva o conjuntiva) klee-neana.
9El metodo de simplificacion de formulas propuesto en [20] no se explica en este documento debido a considera-ciones de espacio.
10El punto fijo del complemento (′) es un valor ξ ∈ [0, 1] tal que ξ′ = ξ. Este valor existe y es unico para todocomplemento monotono decreciente e involutivo. Por ejemplo, para el complemento a′ = 1 − a de la logica difusaestandar usada en este documento se tiene ξ = 1/2.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 17

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
6. Simplificacion (optimizacion) de formulas logicas difusas Para cada formula obtenidaen el paso anterior aplicar la version de logica trivalente de Kleene del metodo de sim-plificacion (optimizacion) de formulas propuesto en [20].
Defusificador El vector de salidas y ∈ Y , donde y = (y1, . . . , ym) y Y = Y1×· · ·×Ym ⊆ Rm, secalcula por medio de un defusificador basado en formulas logicas (booleanas y/o kleeneanas).Estas formulas ponderan el valor del respectivo actuador.
v1j
v2j
vkj
f1j
f2j
fkj
yj+
++
.
.
.
×
×
×
×
×
×Figura 3. Diagrama de bloques del defusificador para la j-esima salida yj (j = 1, 2, . . . ,m), basado en las formulaslogicas (booleanas y/o kleeneanas) fij (i = 1, 2, . . . , k) y actuadores virtuales vij
La j-esima salida yj (j = 1, 2, . . . ,m), correspondiente al j-esimo universo de salida Yjdonde se tienen k actuadores virtuales vij (i = 1, 2, . . . , k) que estan siendo ponderados pork formulas logicas fij dadas por el motor de inferencia, esta dada por (Figura 3):
yj = f1jv1j + f2jv2j + · · ·+ fkjvkj =k∑
i=1
fijvij.
De acuerdo a Espitia y Soriano [9], [21], vij es llamado actuador virtual, fij es llamadasalida de activacion y el producto fijvij es llamado salida virtual. Estos nombres corre-sponden al hecho que en logica booleana fij ∈ {0, 1} y en logica difusa fij ∈ [0, 1], por lotanto fij (al ser adimensional y construido usando la respectiva logica) actua como un acti-vador/desactivador del actuador vij . Ademas, vij al ser un elemento del respectivo universode salida Yi tiene las mismas dimensiones de este ultimo, por lo que funciona como un actu-ador. El termino virtual corresponde al hecho que vij (dependiendo de la aplicacion) podrıa(o no) tener alguna correspondencia con algun elemento fısico real donde el sistema difusoesta actuando.
Concresor Historicamente se ha denominado Concresor a la union entre el Motor de Inferencia yel Defusificador (Figura 1). El Concresor es aquel bloque que realiza la concrecion11 de lainformacion difusa.
11(Del lat. concretıo, -onis). Accion y efecto de concretar [22].
18 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
4. FIS-BKR con combinador convexoEn algunas aplicaciones la seleccion de las extensiones regulares en el paso 4 de la segunda etapadel diseno del motor de inferencia puede ser una tarea difıcil, principalmente por su gran numero.La propuesta dada en [1] esta en la adicion de un bloque llamado Combinador Convexo12 justo antesdel defusificador y despues del motor de inferencia. Esto permite integrar todas las extensionesregulares kleeneanas. En la Figura 4 se muestra el diagrama de bloques del combinador convexo.
1− λij(x)
FNDB(fij)fij
+
+
×
×
×
×FNCB(fij)
λij(x)
Figura 4. Diagrama de bloques del combinador convexo con coeficiente λij(x) ∈ [0, 1] para la i-esima funcionbooleana fij (i = 1, 2, . . . , k) formulada sobre el j-esimo universo de salida (j = 1, 2, . . . ,m). FNCB(fij) yFNDB(fij) corresponden a la forma normal conjuntiva y disyuntiva booleanas de fij , respectivamente.
El proceso de diseno del FIS-BKR con combinador convexo es el mismo al presentado en laSeccion 3 con las siguientes modificaciones en el diseno del motor de inferencia:
Etapa 1: Aproximacion a traves de logica booleana
1. Aproximacion de conjuntos difusos mediante conjuntos bivalentes. Igual al paso 1,etapa 1, Seccion 3.
2. Codificacion bivalente de las regiones aproximadas de operacion Igual al paso 2, etapa 1,Seccion 3.
3. Asignacion de las acciones del sistema en las regiones aproximadas de operacion Igualal paso 3, etapa 1, Seccion 3.
4. Obtencion de formulas Para cada funcion booleana f creada en el paso anterior obtener suforma normal disyuntiva y conjuntiva booleana, donde las variables de dicha formula son lasfunciones de pertenencia de cada conjunto bivalente. La forma normal disyuntiva booleanade f corresponde a fm (extension regular mınima) y la forma normal conjuntiva booleana def corresponde a fM (extension regular maxima).
5. Simplificacion (optimizacion) de formulas Este paso no se realiza.
Etapa 2: Extension a la logica difusa mediante logica trivalente de Kleene
1. Retrosustitucion de conjuntos difusos Igual al paso 1, etapa 2, Seccion 3.
12El uso de combinadores convexos para combinar dos o mas respuestas es una idea con antecedentes. Por ejemplo,en [23] se usa sobre filtros adaptativos.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 19

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
2. Codificacion trivalente de las regiones de operacion Este paso no se realiza.
3. Extension a la logica difusa (por medio de la logica trivalente de Kleene) Este paso no serealiza.
4. Seleccion de las extensiones regulares adecuadas Este paso no se realiza.
5. Obtencion de formulas logicas difusas Este paso no se realiza.
6. Simplificacion (optimizacion) de formulas logicas difusas Este paso no se realiza.
7. Obtencion de combinaciones convexas Para cada extension mınima fm y maxima fM en-contrada en la etapa 1 obtener su combinacion convexa difusa con coeficiente λ definido porel disenador. El coeficiente λ pueder ser seleccionado con algun criterio dependiendo de laaplicacion.
5. AplicacionLa siguiente aplicacion muestra el uso del metodo de diseno de controladores FIS-BKR con combi-nador convexo difuso. Esta aplicacion fue presentada por Espitia [9] y Salazar [20], y previamentepor Lara [12], Hernandez [11] y Tunyasrirut [10] donde se propusieron otras soluciones de controlempleando logica difusa.
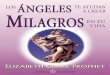
5.1. Modelo dinamicoSe desea mantener el nivel h(t), siendo t la variable tiempo, de cierta cantidad de lıquido en untanque cilındrico en posicion horizontal donde el flujo de salida φs(t) varıa a traves de la valvulaVS . Existen dos valvulas de flujo de entrada. La primera (VG) deja entrar un flujo grande φg(t) delıquido mientras que la segunda (VP ) deja entrar un flujo pequeno φp(t). El flujo total de entradaesta dado por φe(t) = φg(t) + φp(t) como se muestra en la Figura 5(a). Las variables y constantesdel sistema con sus unidades se muestran en la Tabla III.
Tabla III. Variables y constantes del sistema de llenado de un tanque cilındrico en posicion horizontalSımbolo Significado Valor UnidadH Altura del tanque 0.4 m
R = H/2 Radio del tanque 0.2 mh Altura del nivel del lıquido m
Href Altura de referencia 0.3 mL Longitud del tanque 0.6 mρ Densidad del lıquido kg/m3
v Volumen del lıquido dentro del tanque m3
m = ρv Masa del lıquido kgφe = φg + φp Flujo total de entrada m3/s
φg Flujo de entrada por la valvula VG m3/sφp Flujo de entrada por la valvula VP m3/s
φs = CVS
√h Flujo de salida por la valvula VS m3/s
CVSConstante de la valvula VS 1.6× 10−4 m5/2/s
vp Actuador virtual asociado a la valvula VP 0.5× 10−4 m3/svg Actuador virtual asociado a la valvula VG 1.5× 10−4 m3/s
20 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
(a) (b)
Figura 5. (a) Sistema de llenado de un tanque cilındrico en posicion horizontal. (b) Geometrıa del tanque cilındricoen posicion horizontal
La Figura 5(b) muestra la geometrıa del tanque donde (r/2)2 + (R − h)2 = R2, por lo tantoal despejar r se tiene r = 2
√2Rh− h2. El diferencial de volumen del lıquido en el tanque esta
dado por dv = Lrdh = 2L√Hh− h2dh, siendo H = 2R. Para esta aplicacion se supone que la
densidad del lıquido del tanque (ρ) es constante y la misma que la del lıquido entrante y saliente.La ecuacion de conservacion de la masa para este sistema es: dm/dt = dme/dt − dms/dt dondem es la masa de lıquido del tanque, me es la masa entrante y ms la masa saliente. Esta ecuacion sepuede simplificar a dv/dt = φe − φs donde φe = dve/dt y φs = dvs/dt son los flujos de entrada ysalida, ve y vs son los volumenes de lıquido entrante y saliente, y usando las ecuaciones m = ρv,me = ρve y ms = ρvs. Sustituyendo el diferencial de volumen dv encontrado antes y despejandopara dh/dt se obtiene: dh/dt = (φe − φs)/(2L
√Hh− h2). Dado que la valvula de salida se
encuentra en la parte inferior del tanque y actua por accion de la gravedad, el flujo de salida estadado por φs = CVS
√h, dondeCVS es la constante de la valvula VS . Se obtiene entonces la siguiente
ecuacion que modela el sistema:
dh
dt=
φe − CVS√h
2L√Hh− h2
, 0 ≤ h ≤ H.
La Figura 6(a) presenta un diagrama de bloques de la anterior ecuacion diferencial.
5.2. Diseno de un controlador FIS-BKR con combinador convexo
La Figura 6(b) muestra el diagrama de bloques de la estrategia de control elegida. Esta consiste enun esquema de retroalimentacion de la variable nivel h, comparada contra una altura de referenciaHref , para obtener el error e = Href −h, que junto a su derivada, seran las entradas del controladorFIS-BKR con combinador convexo tipo proporcional-derivativo (PD). La salida del controlador esel flujo de entrada al tanque φe.
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 21

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
(a) (b)
Figura 6. (a) Diagrama de bloques del sistema de llenado del tanque cilındrico en posicion horizontal. (b) Controlusando FIS-BKR con combinador convexo.
Aproximacion a traves de logica booleana Para el error de nivel e se definen dos conceptos:error positivo (EP ) y error negativo (EN ) con las siguientes funciones de pertenencia (Figura 7):
µEP(e) =
{1, e ≥ 0.02 m,
0, otro caso,µEN
(e) =
{1, e ≤ −0.02 m,
0, otro caso.(1)
Para la variable de/dt se define un solo concepto: derivada positiva (DP ) con la siguiente funcionde pertenencia:
µDP(de/dt) =
{1, de/dt ≥ 0 m/s,
0, otro caso.(2)
Para la variable de flujo de entrada φe se definen cuatro conceptos: flujo grande (FG), flujo mediano(FM ), flujo pequeno (FP ) y flujo nulo (FN ) con las siguientes punciones de pertenencia:
µFG(φe) =
{1, φe = vp + vg = 2× 10−4 m3/s,
0, otro caso,µFM
(φe) =
{1, φe = vg = 1.5× 10−4 m3/s,
0, otro caso,
µFP(φe) =
{1, φe = vp = 0.5× 10−4 m3/s,
0, otro caso,µFN
(φe) =
{1, φe = 0 m3/s,
0, otro caso.
La Tabla IV muestra las acciones de control, similares a las presentadas en [9], con funciones deactivacion f y F para las valvulas VG y VP para ası obtener los valores de flujo grande, mediano,pequeno y nulo con la activacion y desactivacion de VG y VP .
Tabla IV. Tabla de verdad para las funciones de activacion f y F de VP y VG respectivamenteµEP
µENµDP
f F Regla1 0 1 1 1 Si e es EP y e no es EN y de/dt es DP entonces φe es FG
1 0 0 1 0 Si e es EP y e no es EN y de/dt no es DP entonces φe es FP
0 1 1 0 1 Si e no es EP y e es EN y de/dt es DP entonces φe es FM
0 1 0 0 1 Si e no es EP y e es EN y de/dt no es DP entonces φe es FM
0 0 1 0 0 Si e no es EP y e no es EN y de/dt es DP entonces φe es FN
0 0 0 0 0 Si e no es EP y e no es EN y de/dt no es DP entonces φe es FN
22 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
−0.05 0 0.050
0.2
0.4
0.6
0.8
1
Error [m]
Per
tenen
cia
Error positivo
Error negativo
(a)
−0.05 0 0.050
0.2
0.4
0.6
0.8
1
Derivada de error [m/s]
Per
ten
enci
a
Derivada positiva
(b)
Figura 7. (a) Conjuntos asociados al error positivo y negativo. (b) Conjunto asociado a la derivada del error positiva
Extension a la logica difusa estandar y uso del combinador convexo El primer paso consisteen suavizar los conceptos booleanos cambiandolos por difusos. Los conjuntos difusos para losrespectivos conceptos del antecedente son los siguientes:
µEP(e) =
0, e < 0 m,
25e, 0 m ≤ e ≤ 0.04 m,
1, e > 0.04 m,
µEN(e) =
1, e < −0.04 m,
−25e −0.04 m ≤ e ≤ 0 m,
0 e > 0 m,
µDP(de/dt) =
0, de/dt < −0.02 m/s,
25de/dt+ 0.5, −0.02 m/s ≤ de/dt ≤ 0.02 m/s
1, de/dt > 0.02 m/s.
Las funciones de pertenencia para los conjuntos difusos del consecuente son los mismos que parael caso booleano.
−0.05 0 0.050
0.5
1
Error [m]
Pertenen
cia
Error negativo
Error positivo
(a)
−0.05 0 0.050
0.5
1
Derivada de error [m/s]
Pertenen
cia
Derivada positiva
(b)
Figura 8. (a) Conjuntos difusos asociados al error positivo y negativo. (b) Conjunto difuso asociado a la derivada delerror positiva
Las formas normales (disyuntiva y conjuntiva) booleanas para las funciones de activacion f y F dela Tabla IV llevan a las extensiones kleeneanas extremas asociadas a f y F , las cuales son:
fm =(µEP∧ µ′EN
∧ µDP
)∨(µEP∧ µ′EN
∧ µ′DP
),
fM =(µEP∨ µ′EN
∨ µ′DP
)∧(µEP∨ µ′EN
∨ µDP
)∧(µEP∨ µEN
∨ µ′DP
)∧ (µEP
∨ µEN∨ µDP
) ,
Fm =(µEP∧ µ′EN
∧ µDP
)∨(µ′EP∧ µEN
∧ µDP
)∨(µ′EP∧ µEN
∧ µ′DP
),
FM =(µ′EP∨ µEN
∨ µDP
)∧(µEP∨ µEN
∨ µ′DP
)∧ (µEP
∨ µEN∨ µDP
) .
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 23

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
Estas formulas en logica trivalente de Kleene pueden ser entendidas como formulas en logica di-fusa estandar basados en la teorıa expuesta en [13], [15]–[17].
Los coeficientes de la combinacion convexa fueron tomados como conjuntos difusos con perte-nencia constante. Esto significa que λi(x) = λi ∈ [0, 1] para todo x, con i = 1, 2. Las expresionespara las funciones de activacion f y F estan dadas por:
f = λ1fM + (1− λ1)fm, λ1 ∈ [0, 1] , (3)F = λ2FM + (1− λ2)Fm, λ2 ∈ [0, 1] . (4)
Para obtener la accion de control (flujo de entrada) φe se ponderan (3) y (4) con actuadores virtualesvp = 0.5× 10−4 m3/s y vg = 1.5× 10−4 m3/s como sigue:
φe = vp · f + vg ·F. (5)
Notar que las unidades de φe son las mismas que las unidades de los actuadores virtuales vp y vgdado que las funciones de activacion f y F son adimensionales. La Figura 9 muestra las superficiesde control extremas para el flujo de entrada.
−0.05
0
0.05
−0.05
0
0.050
1
2
x 10−4
Derivada de error [m/s]Error [m]
Flu
jo d
e en
trad
a [m
3/s
]
(a)
−0.05
0
0.05
−0.05
0
0.050
1
2
x 10−4
Derivada de error [m/s]Error [m]
Flu
jo d
e en
trad
a [m
3/s
]
(b)
Figura 9. Superficies de control para el flujo de entrada φe cuando: (a) λ1 = 0 y λ2 = 0, (b) λ1 = 1 y λ2 = 1.
Cabe anotar que si las expresiones (3) y (4) son evaluadas para los conceptos de logica booleana(1) y (2), las extensiones maxima y mınimas coinciden. Esto implica que f = fM = fm y F =FM = Fm, es decir, no hay sensiblidad a los parametros de la combinacion λ. En la Figura 10 semuestra el diagrama de bloques del controlador FIS-BKR disenado.
5.3. ResultadosLa implementacion del sistema de control se realizo mediante la simulacion del sistema dinamicoen el entorno de programacion visual Simulink de MATLAB13. Se uso un tiempo de simulacionTs = 5000 s y pasos de tiempo de4t = 5 s. Teniendo como flujo de entrada al tanque:
φe = 0.5× 10−4 · (λ1fM + (1− λ1)fm) + 1.5× 10−4 · (λ2FM + (1− λ2)Fm) . (6)
13Los archivos de simulacion se pueden encontrar en el repositorio publico [24].
24 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
Figura 10. Diagrama de bloques del controlador FIS-BKR con combinador convexo disenado
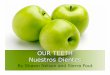
Al variar los parametros λ1 y λ2, el sistema controlado presenta distintas repuestas temporales.En la Figura 11 se presenta la respuesta del controlador booleano (sin suavizacion de los concep-tos), al tiempo que se exhiben respuestas para algunos parametros de combinacion convexa. Seobserva que los controladores presentan error en estado estacionario y diferentes tiempos de es-tablecimiento. Llama la atencion la respuesta del sistema para los parametros λ1 = 0 y λ2 = 0puesto que no hay establecimiento alguno del nivel. La razon de este comportamiento esta asociadaa la magnitud del flujo de entrada que en este caso es la accion de control mınima posible (ecuacion(6)). Este comportamiento muestra clara evidencia de un hecho importante: no todo controladorFIS-BKR disenado a partir de un controlador booleano que aproxima la referencia controla el sis-tema.
En la Figura 11 se observa que el control booleano presenta cierta variabilidad consecuencia dela discontinuidad de los conceptos, situacion que no ocurre cuando estos son suavizados, como sepropone en la metodologıa de diseno de controladores FIS-BKR.
Evaluacion de ındices de desempeno Es de nuestro interes evaluar para el sistema controladolos ındices de desempeno ITSE e ISE. Para este caso se uso la definicion discreta de tales ındicesdonde se remplaza la integral por una sumatoria y los valores de error son muestreados. Estosındices estan definidos por:
ISE =
√∫ Ts
0
e2(t)dt, ITSE =
√∫ Ts
0
te2(t)dt,
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 25

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Tiempo [s]
Niv
el [
m]
Respuestas Temporales Para Distintos Parámetros
λ1
λ2
0 0
1 0
0 1
1 1
0.52941 0.058824
Control Booleano
0.28
0.29
0.3
Figura 11. Respuesta temporal de la variable nivel para el sistema controlado para diferentes coeficientes de combi-nacion convexa.
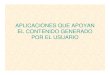
donde e(t) = Href − h(t) es el error de nivel y Ts es el tiempo de simulacion. Estos criteriosde un solo numero dan cuenta del cuadrado del error en el tiempo. El primero favorece sistemascon respuestas que se acercan a una referencia dada, mientras que el segundo, por tener en cuentael tiempo usado para alcanzarla, es menor para sistemas que lo hacen rapidamente. La Figura 12muestra como cambian los anteriores ındices de desempeno con la variacion de los parametros λ1y λ2.
00.2
0.40.6
0.81
0
0.5
1
0.022
0.024
0.026
0.028
0.03
0.032
0.034
Parámetro λ2
Superficie ISE en función de λ1 y λ
2
Parámetro λ1
Valo
r IS
E
(a)
00.2
0.40.6
0.81
0
0.5
1
0.15
0.2
0.25
Parámetro λ2
Superficie ITSE en función de λ1 y λ
2
Parámetro λ1
Valo
r IT
SE
(b)
Figura 12. (a) Valores del ındice ISE para diferentes valores de λ1 y λ2. (b) Valores del ındice ITSE para diferentesvalores de λ1 y λ2.
El proceso de optimizacion de los ındices ISE e ITSE se realizo mediante la evaluacion de unarejilla de 16 × 16 puntos en el dominio [0, 1] × [0, 1], el cual tomo un tiempo de 35 minutos y 30segundos14. Se obtuvieron los parametros optimos λ1 = 0.52941 y λ2 = 0.058824 para ambos
14Proceso ejecutado en un equipo de computo con: procesador: AMD A8 2.90 GHz, memoria RAM: 4 GB, sistema
26 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
ındices. La Tabla V resume los valores que optimizan los ındices de estudio, ademas de presentarel desempeno del sistema de control booleano.
Tabla V. Indices ISE e ITSE para las extensiones extremas fm, fM , Fm, FM y valores de los coeficientes λ1 y λ2 queminimizan ambos ındices (negrilla).λ1 λ2 ISE ITSE0 0 0.0496 1.15560 1 0.0350 0.14311 0 0.0221 0.33641 1 0.0351 0.3405
0.5294 0.0588 0.0224 0.1116Booleano 0.0255 0.2389
En este caso el proceso de optimizacion llevo a una mejora de hasta el 1.427% para ISE y de hasta21.99% para el ITSE con respecto al desempeno de las extensiones extremas. Sin embargo, cabenotar que no se puede concluir que este controlador optimo sea mejor que cualquier extension alge-braica ya que esta aplicacion se limito exclusivamente a coeficientes con pertenencia constante. Porotro lado, la simple validacion de si lo es o no resulta una tarea extensa como se vera a continuacion.
Conteo de extensiones Por ultimo, con el fin de mostrar al lector lo complejo que puede serbuscar la mejor extension algebraica dado un ındice de desempeno por el metodo tradicional(Seccion 3), en la Tabla VI se muestran las extensiones posibles de la funcion f de la Tabla IVobtenidas al aplicar el Metodo 2.
Tabla VI. Posibilidades para extender regularmente la funcion booleana f de la Tabla IV.
(a)Cantidad de u’s
(nivel de ambiguedad) µEPµEN
µDPf
0
1 0 1 11 0 0 10 1 1 00 1 0 00 0 1 00 0 0 01 1 1 -1 1 0 -
1
u 0 1 uu 0 0 uu 1 1 -u 1 0 -1 u 1 -1 u 0 -
(b)Cantidad de u’s
(nivel de ambiguedad) µEPµEN
µDPf
1
0 u 1 0, u0 u 0 0, u1 1 u -1 0 u 1, u0 1 u 0, u0 0 u 0, u
2
u u 1 uu u 0 u1 u u -0 u u 0, uu 1 u -u 0 u u
3 u u u u
Donde “-” representa una condicion de no importa y pueden valer 0, 1 o u, teniendo en cuentalas condiciones de regularidad. Para conocer la cantidad de extensiones es necesario realizar elproducto de las posibilidades de cada fila, lo cual, sin tener en cuenta las condiciones de no importa,es de a lo menos 26 = 64. Esta serıa la cantidad de funciones kleeneanas regulares que se tendrıan
operativo: Windows 10 de 64 bit, Version MATLAB: 7.12.0 (R2011a).
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 27

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
que evaluar como mınimo para elegir la mejor, no sin antes encontrar sus formulas logicas lo cualde por sı es una tarea ardua.
6. Conclusiones y comentarios finales
Este artıculo presento nueva evidencia de las caracterısticas favorables de controladores FIS-BKRcon combinador convexo difuso cuando se evaluaron los ındices de desempeno ISE e ITSE. Basa-dos en hechos teoricos se puede asegurar que la estrategia de control FIS-BKR con combinadorconvexo difuso y su metodologıa de diseno generalizan el FIS-BKR actual, permitiendo ası traba-jar con un modelo mas completo, como lo demuestra una mejora en el desempeno de 1.427% parael ISE y 21.99% en el caso del ITSE, comparados con las alternativas extremas del FIS-BKR y uncontrolador basado en logica booleana.
Por el caracter global que tienen las funciones extremas, se puede decir que la informacionobtenida de la etapa de diseno con logica booleana esta siendo incorporada sin sesgo alguno ysin mayor complejidad; ya que se obtiene a partir de las alternativas extremas, sin necesidad depasar por metodos computacionalmente costosos de deduccion de formulas que requieren otras ex-tensiones, solucionando en cierto modo algunas de las desventajas mencionadas por Salazar en [7].
Tanto el estudio de la simplificacion de formulas representadas mediante formas normales, comola caracterizacion de las familias de coeficientes-parametro para el proceso de sintonizacion serıanimportantes aportes en la fundamentacion del uso del combinador convexo, que por su novedad,ha sido poco estudiada. Ası mismo, consideramos que el estudio de otras tecnicas de optimizacionen dominios compactos para el proceso de sintonizacion, diferentes al de “fuerza bruta” que fueutilizada, es indispensable cuando la cantidad de parametros sea considerablemente grande, ya quehacerlo con una tecnica poco sofisticada podrıa resultar inviable.
Referencias[1] J. Soriano and J. Chacon, “Concresor based on kleenean relations using convex combinator,” in The 2016 IEEE
International Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver, BC, Canada, Jul. 2016, pp. 133–139.https://doi.org/10.1109/FUZZ-IEEE.2016.7737679. ↑ 8, 9, 13, 14, 19
[2] G. Pangalos and G. Lichtenberg, “Approach to boolean controller design by algebraic relaxation for heating sys-tems,” in Proceedings of the 4th IFAC Conference on Analysis and Design of Hybrid Systems (ADHS 12), vol. 45,no. 9, Eindhoven, The Netherlands, Jun. 2012, pp. 210–215. https://doi.org/10.3182/20120606-3-NL-3011.00070.↑ 8
[3] J. J. Soriano, O. L. Gonzalez Melo, F. V. Munar Fontecha, and A. A. Ramos Acosta, “Propuesta de concresorbasado en relaciones booleanas,” Ingenierıa, vol. 6, no. 2, pp. 42–50, 2001, Bogota. Colombia. ↑ 8, 14
[4] E. H. Mamdani and S. Assilian, “An experiment in linguistic synthesis with a fuzzy logic controller,” Interna-tional journal of man-machine studies, vol. 7, no. 1, pp. 1–13, 1975. https://doi.org/10.1016/S0020-7373(75)80002-2.↑ 9
[5] O. Salazar, J. Soriano, and H. Serrano, “From binary logic functions to fuzzy logic functions,” Applied Mathe-matical Sciences, vol. 7, no. 103, pp. 5129–5138, 2013, ISSN 1312-885X. ↑ 9, 12
[6] M. Mukaidono, “Regular ternary logic functions—ternary logic functions suitable for treating ambiguity,” IEEETransactions on Computers, vol. C-35, no. 2, pp. 179–183, Feb. 1986. https://doi.org/10.1109/TC.1986.1676738.↑ 9, 11
28 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS

J. D. Chacon • J. Soriano •O. Salazar
[7] O. Salazar, “Metodo de diseno y optimizacion de controladores difusos FIS-BBR cuasi-estandar por mediode logicas clasica y trivalente de kleene,” Trabajo de grado en Maestrıa en Ingenierıa Industrial, UniversidadDistrital Francisco Jose de Caldas. Facultad de Ingenierıa, Bogota D.C., Colombia, 2014. ↑ 9, 14, 15, 28
[8] L. A. Zadeh, “Fuzzy sets,” Information and Control, vol. 8, no. 3, pp. 338–353, 1965. https://doi.org/10.1016/S0019-9958(65)90241-X. ↑ 9, 14
[9] H. E. Espitia, “Aplicacion del concresor basado en relaciones booleanas para sistemas de logica difusa tipo dos,”Trabajo de grado en Maestrıa en Ingenierıa Industrial, Universidad Distrital Francisco Jose de Caldas. Facultadde Ingenierıa, Bogota D.C., Colombia, Jul. 2009. ↑ 9, 18, 20, 22
[10] S. Tunyasrirut and S. Wangnipparnto, “Level control in horizontal tank by fuzzy-pid cascade controller,” WorldAcademy of Science, Engineering and Technology, vol. 25, pp. 78–82, 2007. ↑ 9, 20
[11] J. Hernandez S. and C. Cuadra A., “Estrategias comparativas de control difuso y control con arreglo inversonyquist en sistemas multivariables alineales,” Revista Facultad de Ingenierıa, vol. 9, pp. 53–58, 2001. ↑ 9, 20
[12] F. Lara-Rojo, E. N. Sanchez, and D. Zaldıvar-Navarro, “Real-time fuzzy microcontroller for a didactic levelsystem,” in Electro 2001, 2001, pp. 153–158. ↑ 9, 20
[13] M. Gehrke, C. Walker, and E. Walker, “Normal forms and truth tables for fuzzy logics,” Fuzzy Sets and Systems,vol. 138, no. 1, pp. 25–51, Aug. 2003. https://doi.org/10.1016/S0165-0114(02)00566-3. ↑ 10, 11, 12, 24
[14] N. Takagi, K. Nakashima, H. Kikuchi, and M. Mukaidono, “A characterization of kleenean functions,” in Pro-ceedings of the 25th International Symposium on Multiple-Valued Logic, Bloomington, Indiana, May 1995, pp.236–241. https://doi.org/10.1109/ISMVL.1995.513537. ↑ 10
[15] M. Gehrke, C. Walker, and E. Walker, “A mathematical setting for fuzzy logic,” International Journal of Uncer-tainty, Fuzziness and Knowledge-Based Systems, vol. 5, no. 3, pp. 223–238, Jun. 1997. https://doi.org/10.1142/S021848859700021X. ↑ 11, 24
[16] ——, “Some comments on fuzzy normal forms,” in Proceedings of the ninth IEEE International Conference onFuzzy Systems, vol. 2, San Antonio, Texas, May 2000, pp. 593–598. ↑ 11, 24
[17] H. T. Nguyen and E. A. Walker, A First Course in Fuzzy Logic, 3rd ed. Boca Raton, Florida: Chapman &Hall/CRC, 2006. ↑ 11, 16, 24
[18] O. Salazar and J. Soriano, “Convex combination and its application to fuzzy sets and interval-valued fuzzy setsI,” Applied Mathematical Sciences, vol. 9, no. 22, pp. 1061–1068, 2015, ISSN 1312-885X. ↑ 14
[19] ——, “Convex combination and its application to fuzzy sets and interval-valued fuzzy sets II,” Applied Mathe-matical Sciences, vol. 9, no. 22, pp. 1069–1076, 2015, ISSN 1312-885X. ↑ 14
[20] O. Salazar, “Metodo de simplificacion de formulas booleanas, borrosas cuasi-estandar y borrosas cuasi-estandarde intervalo por medio de algebras finitas,” Trabajo de grado en Ingenierıa Electronica, Universidad DistritalFrancisco Jose de Caldas. Facultad de Ingenierıa, Bogota D.C., Colombia, May 2011. ↑ 17, 18, 20
[21] H. E. Espitia and J. J. Soriano, “Sistema de inferencia difusa basado en relaciones booleanas,” Ingenierıa, vol. 15,no. 2, pp. 52–66, 2010, Bogota. Colombia. ↑ 18
[22] R. A. E., Diccionario de la lengua espanola, 22nd ed. Espasa Calpe, S.A., 2003, edicion Electronica. Version1.0. ↑ 18
[23] J. Arenas-Garcıa, A. R. Figueiras-Vidal, and A. H. Sayed, “Mean-square performance of a convex combinationof two adaptive filters,” IEEE Transactions on Signal Processing, vol. 54, no. 3, pp. 1078–1090, Mar. 2006.https://doi.org/10.1109/TSP.2005.863126. ↑ 19
[24] J. D. Chacon. (2017). [Online]. Available: https://github.com/juandados/ConvexCombinator. ↑ 24
Juan David Chacon LeonIngeniero Electronico, Universidad Distrital Francisco Jose de Caldas. Matematico, Universidad Nacional de Colom-bia, sede Bogota. Magister en Ciencias Matematicas, Universidad Nacional de Colombia, sede Bogota. Correoelectronico: [email protected]
INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS 29

Sistema de Inferencia Difusa basado en Relaciones Booleanas y Kleeneanas con Combinador Convexo
Jose Jairo Soriano MendezIngeniero Electronico, Universidad Distrital Francisco Jose de Caldas. Ingeniero Quımico, Universidad Nacional deColombia, sede Bogota. Magister en Ingenierıa Industrial, Universidad Distrital Francisco Jose de Caldas. Correoelectronico: [email protected]
Omar Salazar MoralesIngeniero Electronico, Universidad Distrital Francisco Jose de Caldas. Magister en Ingenierıa Industrial, UniversidadDistrital Francisco Jose de Caldas. Magister en Ciencias Matematicas, Universidad Nacional de Colombia, sede Bo-gota. Estudiante de Doctorado en Ciencias Matematicas, Universidad Nacional de Colombia, sede Bogota. Correoelectronico: [email protected]
30 INGENIERIA • VOL. 23 • NO. 1 • ISSN 0121-750X • E-ISSN 2344-8393 • UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS