Embed Size (px)
Citation preview

Research ArticleModeling and Analysis of an Air-Breathing FlexibleHypersonic Vehicle
Xi-bin Zhang12 and Qun Zong2
1 School of Science Tianjin University of Science and Technology Tianjin 300222 China2 College of Electrical Engineering amp Automation Tianjin University Tianjin 300072 China
Correspondence should be addressed to Xi-bin Zhang brookygo163com
Received 24 December 2013 Revised 31 March 2014 Accepted 31 March 2014 Published 28 April 2014
Academic Editor Ricardo Femat
Copyright copy 2014 X-b Zhang and Q Zong This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
By using light-weighted material in hypersonic vehicle the vehicle body can be easily deformed The mutual couplings inaerodynamics flexible structure and propulsion system will bring great challenges for vehicle modeling In this work engineeringestimated method is used to calculate the aerodynamic forces moments and flexible modes to get the physics-based model ofan air-breathing flexible hypersonic vehicle The model which contains flexible effects and viscous effects can capture the physicalcharacteristics of high-speed flight To overcome the analytical intractability of themodel a simplified control-orientedmodel of thehypersonic vehicle is presented with curve fitting approximations The control-oriented model can not only reduce the complexityof the model but also retain aero-flexible structure-propulsion interactions of the physics-based model and can be applied fornonlinear control
1 Introduction
Hypersonic vehicle (HSV) which can travel faster than 5times the speed of sound has wide range of applications inmilitary and civilian areas The research on such vehicle hasreceived tremendous attention in the fields of aeronautics andastronautics in recent years Unlike conventional aircraft thepropulsion system of hypersonic vehicle is highly integratedinto the airframe which will cause strong couplings betweenthe airframe and propulsion system Furthermore high-speed flight flexible structure and low natural frequency canresult in the bending of fore-body and aft-body of vehiclewhich will affect the airflow characteristics through the inletand exit of the engine and hence the aerodynamic layout onthe vehicle surfaces The high couplings among the aerody-namics flexible structure and propulsion system make themodeling and control of such vehicle very challenging [1]
From the 1990s several researchers have paid moreattention to the development of the modeling of the hyper-sonic vehicle The first attempt at a comprehensive analyticalmodel of a flexible HSV was presented by Chavez et alNewtonian impact theory was utilized to calculate the forces
and moments on the vehicle The first flexible mode was esti-mated by a complete NASTRAN analysis and the couplingsbetween the rigid and flexible dynamic were considered[2] Clark et al developed a two-dimensional CFD-basedmodel of a full-scale generic air-breathing hypersonic flightvehicle (CSULA-GHV) The modeling procedure includesconfiguration design CFD simulations and elasticity andaerodynamic interaction [3 4] Bolender et al used a com-bination of oblique shock Prandtl-Meyer expansion theory[5] and piston theory [6 7] to calculate the aerodynamicforces andmoments and conducted the first principles model(FPM) with X-43A vehicle geometry The model is a non-linear physics-based model that can capture the couplingsamong the aerodynamics flexible structural dynamics andpropulsion system To overcome the difficulty for controllerdesign Parker et al [8] Fiorentini et al [9] and Sigth-orsson et al [10] presented several control-oriented modelsby replacing complex aerodynamic force functions in FPMmodel with curve fitting method respectively Frendreis etal developed a comprehensive aerothermoelastic-propulsionmodel of a six-degree-of-freedom dynamics of a generichypersonic vehicle [11 12] The three-dimensional model
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 264247 9 pageshttpdxdoiorg1011552014264247
2 Mathematical Problems in Engineering
Cowl doorShock
Shear layer
L
L1 L2 L3
1205911
1205912
1205913120575e
xB
zB
hen
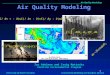
Figure 1 The side view of X-43A HSV
extends the 3D flight dynamics analysis framework to includethe effects of flexibility and unsteady aerodynamics Basedon these models several studies on the robust guidance andnonlinear control systems design have been published inrecent years The controller design methods provide robuststability and performance for theHSV systems under varyingflight conditions [13ndash17]
The HSV model should contain the real physical char-acteristics and can be applied for nonlinear control Theunsteady flexible effects which are omitted in the existingcontrol-orientedmodels are significant in aeroservoelasticityanalysis For conducting a high-fidelity control-orientedmodel which can capture the inherent couplings of vehiclewe concentrate on the influence of flexible effects on theaerodynamic and propulsion system and present an air-breathing flexible HSV model by analyzing the physicalcharacteristics of vehicle flight Compressible flow theory andEckertrsquos reference temperature method are used to calculatethe complex forces andmoments which contain the unsteadyflexible effects and viscous effects By replacing the compli-cated aerodynamic forceswith curve fitting approximations asimplified control-oriented model is obtained with the inter-actions of aerodynamics flexible structure and propulsionsystem The stability analysis and pole-zero analysis are usedto analyze the dynamic characteristic of the vehicle modelThe results show that the control-oriented model reduces thecomplexity of the physics-based model and is convenient fornonlinear control
2 Hypersonic Vehicle Modeling
The hypersonic vehicle which typically has a tightly inte-grated airframe and scramjet propulsion system is quitedifferent from traditional aircraft Figure 1 shows the sideview of X-43A hypersonic vehicle and the literature [3]presents the detailed parameters of such vehicle The lowerfore-body surface of the vehicle has two functions one is toproduce lift andnose-uppitchingmoment another is to act asa compression system to slow the flow velocity and increasethe pressure and temperature at the inlet to the engine Theaft-body surface acts as an expansion nozzle to produce liftthrust and nose-down pitching moment [2] The scramjetengine is located underside the vehicle with a translating cowldoor which is used to maintain a shock-on-lip condition
for off-design flight conditions [3] In this vehicle theairframe and propulsion system cannot separate from eachother Furthermore the flexible structure bending affects thepressure distribution on the vehicle and the performanceof propulsion system Therefore the aerodynamic-flexiblestructure-propulsion interactions should be included in thehypersonic vehicle modeling
21 Flexible Structure We assume that the fuselage struc-ture is a uniform free-free beam and the displacementsare sufficiently small to satisfy Hookersquos Law and only thetransverse displacements of the beam are considered Theassumed modes approach [18] is used to calculate the naturalfrequencies and mode shapes of the vehicle This methodhas the advantage of simplicity and can achieve the desiredaccuracy The method is based on Lagrangersquos equations
119889
119889119905(120597119879
120597 119902119894
) minus120597119879
120597119902119894
+120597119881
120597119902119894
= 119891119894 119894 = 1 2 (1)
where 119879 is the total kinetic energy 119881 is the potential energyof the system and 119891
119894is the generalized force
The displacement of the flexible structure is
120596 (119909 119905) =
119899
sum
119894=1
Φ119894 (119909) 120578119894 (119905) (2)
where 120578119894is the generalized model coordinate and the func-
tions Φ119894(119909) 119894 = 1 2 119899 are the assumed modes which
must be linearly independent satisfy all of the geometricboundary conditions of the flexible structure and possessall the required derivatives The free-free beam meets thesatisfaction and we can take the mode shapes of the free-freebeam to be the assumed modes
Calculating the kinetic energy 119879 and potential energy 119881and substituting them into (1) then the Lagrangersquos equationscan become
119872 120578 + 119870120578 = 119891 (3)
where 119891= [1198911 sdot sdot sdot 119891119899] and the mass matrix 119872
119899times119899and the
stiffness matrix119870119899times119899
are symmetricBy setting 119891 = 0 120578 = minus120596
2120578 we can get the unforced
harmonic dynamics of the system (1205962119868 minus119872
minus1119870)120578 = 0
Then the natural frequencies of the flexible structure arethe square roots of the eigenvalues of 119872minus1119870 and the modeshapes are the combinations of the assumedmodesΦ
119894(119909) 119894 =
1 2 119899 with the coefficients of the eigenvectors of119872minus1119870The primary effects of flexible structure on the aerody-
namic and propulsion system are in the form of deflectionsof the fore-body and aft-body as shown in Figure 2 whichis a simplification figure of the flexible vehicle model andonly the first flexible mode is considered [3 7] Suppose thata bending deflection 120579 of the beam is sufficiently small thenwe can replace the deflection by the deflection angle
120579 (119909 119905) asymp tan 120579 (119909 119905) = 120597120596 (119909 119905)
120597119909 (4)
Mathematical Problems in Engineering 3
Flexible Rigid
Δ1205911120578 Δ1205912120578
Figure 2 The flexible vehicle model
By using the principle of separation of variables we obtainthe deflection caused by the 119894th flexible mode
120579119894 (119909 119905) =
120597
120597119909[120593119894 (119909) 120578119894 (119905)] =
119889120593119894 (119909)
119889119909120578119894 (119905) (5)
where 120593119894(119909) is the mode shape and 120578
119894(119905) is the generalized
coordinateConsidering 119899 flexible modes the fore-body deflection
can be written as
Δ1205911=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=0
120578119894 (119905) (6)
The aft-body deflection is
Δ1205912=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=119871
120578119894 (119905) (7)
Bending of the fore-body and aft-body together canchange the airflow characteristics of vehicle surfaces then itwill affect the engine inlet condition and alter the aerody-namic performance
22 Aerodynamic Model Aerodynamic modeling is animportant issue in hypersonic vehicle modeling The cou-plings between the flexible dynamics and rigid dynamicsalways occur through the aerodynamic forces and momentsOblique shock relations Prandtl-Meyer theory and pistontheory can be employed to estimate the aerodynamic forcesand moments on the vehicle
221 Aerodynamic Forces Shock and expansion waves arecommon physical phenomena in hypersonic flows By usingthe oblique shock and Prandtl-Meyer theory we can calculatethe pressure Mach number and temperature behind theshock or expansion wave [3] Furthermore the flexible effectsaffect the wave structure on the vehicle surface and canchange the angle of attack and control angles which in turnchange the pressures on vehicle surfaces
For the upper surface if 120572 + Δ1205911lt 1205911 an oblique shock
wave forms on the upper surface if120572+Δ1205911gt 1205911 an expansion
fan forms on the upper surface if 120572 + Δ1205911= 1205911 then the
upper surface experiences the freestream By using obliqueshock and Prandtl-Meyer theory we can obtain the force andmoment on the upper surface which can be resolved into 119909-and 119911-body axes components
119865119909up = minus119901up119871 tan 1205911
119865119911up = 119901up119871
119872up = 119911up119865119909up minus 119909up119865119911up (8)
Similar to the upper surface of the vehicle the forces andmoments on the lower fore-body surface engine nacelle andelevator surface can be obtained respectively The pressureover the aft-body surface is affected by the exhaust gases fromthe propulsion system By calculating the lower fore-bodysurface pressure the inner pressure in the engine and theposition of the shear layer we can get the force and momenton the aft-body surface [2] Then the resultant aerodynamicforces and moments on the 119909- and 119911-body axes 119865
119909119903 119865119911119903119872119903
are summarized from the individual components
222 Unsteady Flexible Effects When traveling at high speedthe interactions between the fluid and the flexible structureof such vehicle may lead to unsteady aerodynamic effectsUnderstanding the consequences of unsteady aerodynamiccaused by flexible effects is significant to the development offlexible vehicle modeling
Assuming that the flexible effects only occur in the z-direction and the engine is rigid the unsteady flexible effectshere are considered as small perturbations of deformationvelocity and angular rate
(119909 119905) =
infin
sum
119894=1
120593119894 (119909) 120578
119894 (119905) = Φ sdot 120578 (9)
120579 =
119899
sum
119894=1
119889120593119894 (119909)
119889119909120578119894 (119905) = Φ sdot 120578 (10)
Piston theory is applied to compute the unsteady aero-dynamic effects behind oblique shock waves and expansionfans The pressure on the surface is given by [7]
119875
119875119894
= (1 +120574 minus 1
2
119908119894
119886119894
)
2120574(120574minus1)
(11)
According to the first-order linear piston theory theinfinitesimal force due to the pressure is
119889119865 = minus119875119889119860119899 = minus (119875119894+ 120588119894119886119894[119881119894sdot 119899]) 119889119860119899 (12)
where 119875119894is the local pressure behind the shock or expansion
wave 119881119894is the velocity of the surface to the steady flow 120588
119894 119886119894
are the atmospheric density and sonic speed respectively 119899is the outward pointing surface normal and 119889119860 is the surfaceelement
For the upper surface the velocity due to the flexibledeformation velocity and angular rate perturbations is
119881up = 1198811cos 1205911
997888119894 + (119881
1sin 1205911+ (119909 119905))
997888119896 + (Φ sdot 120578) times 119903up
(13)
where 1198811 119903up are the velocity of the flow and the position
vector of a point on the upper surface respectively
4 Mathematical Problems in Engineering
Substituting the velocity 119881up into (12) the unsteady forceand moment on the upper surface can be written as
Δ119865up119909 = int
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909) + Φ sdot 120578] sin 120591
1119889119909
Δ119865up119911 = minusint
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909)
+Φ sdot 120578] cos 1205911119889119909
Δ119872up = 119911upΔ119865up119909 minus 119909upΔ119865up119911
(14)
For the lower fore-body surface the unsteady force andmoment are given by
Δ119865119889119891119909
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] sin 1205912119889119909
Δ119865119889119891119911
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] cos 1205912119889119909
Δ119872119889119891= 119911119889119891Δ119865119889119891119909
minus 119909119889119891Δ119865119889119891119911
(15)
For the lower aft-body surface the unsteady force andmoment are given by
Δ119865119889119886119909
= int
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times sin (1205911+ 1205913) 119889119909
Δ119865119889119886119911
= minusint
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times cos (1205911+ 1205913) 119889119909
Δ119872119889119886= minus 119911
119889119886Δ119865119889119886119909
minus 119909119889119886Δ119865119889119886119911
(16)
Summarize the unsteady forces and moments on eachsurface and denote 119865
119909fle 119865119911fle119872fle as the unsteady flexibleaerodynamic of vehicle then we can get the total body forceand moment
119865119909= 119865119909119903+ 119865119909fle
119865119911= 119865119911119903+ 119865119911fle
119872 = 119872119903+119872fle
(17)
223 Viscous Effects The inviscid flow cannot describe thereal airflow characteristicsWith highMach flight the viscousfluid moves relatively to the vehicle which can generateviscous friction and can result in boundary layer effect andaerodynamic heating The flow temperature changes and itis difficult to calculate the aerodynamic parameters insidethe boundary layer Similar to the literature [19] Eckertrsquosreference temperaturemethod is used to compute the viscousskin friction on each surface of the vehicle The referencetemperaturewhich is a function of theMach number (119872) andtemperature (119879) at the edge of the boundary layer as well asthe wall (skin) temperature 119879
119908can be written as
119879lowast= 119879[1 +119872
2+ 058 (
119879119908
119879minus 1)] (18)
Based on the reference temperature we can calculatethe density 120588lowast the viscosity 120583lowast Reynolds number Relowast andthe skin friction coefficient 119862
119891with the perfect gas law and
Sutherlandrsquos formulaThen the shear stress on the surface canbe computed by
120591119908= (
1
2120588infin1198812
infin)119862119891 (19)
Integrating (19) the skin friction drag can be given by
119865vis = int120591119908119889119909 (20)
Then the normal and axial forces are obtained as follows
119873vis = 119865vis sin120573 119860vis = 119865vis cos120573 (21)
where 120573 is the surface inclination to the body axisBy using the coordinate transformation the additional
lift drag and moment of viscous effects can be written as
119871vis = 119873vis cos120572 minus 119860vis sin120572
119863vis = 119873vis sin120572 minus 119860vis cos120572
119872vis = 119873vis119909 + 119860vis119911
(22)
We consider the viscous skin friction on the uppersurface lower fore-body surface lower aft-body surfacesurface below the engine nacelle and control surfaces Bycalculating the additional lift drag and moment on eachsurface we can get the total additional lift119871vis additional drag119863vis and additional moment119872vis
Translating the force 119865119909 119865119911into the lift and drag acting
on the vehicle and taking the viscous effects into account thetotal lift drag and pitching moment are
119871 = 119865119909sin120572 minus 119865
119911cos120572 + 119871vis
119863 = minus 119865119909cos120572 minus 119865
119911sin120572 + 119863vis
119872 = 119872119903+119872fle +119872vis
(23)
The flexible and viscous effects are included in force andmoment formulations in (23) If we assume a rigid structuresuch that 120578
1= 1205782= 1205783= 1205781= 1205782= 1205783= 0 and viscous effect
is excluded then (23) is steady aerodynamic forces of a rigidbody vehicle
Mathematical Problems in Engineering 5
224 Generalized Forces In this paper we present the load-ings on the upper surface lower surface and control surfacethe generalized forces for the first three flexible modes can bewritten as
119873119894= int
119871
0
120593119894 (119909) 119901up 119889119909 minus int
119871119891
0
120593119894 (119909) 119901119889119891 119889119909
minus int
119871
119871119891+119871119899
120593119894 (119909) 119901119889119886 119889119909 minus int
119871119899
119871119891
120593119894 (119909) 119901119890119899 119889119909 + 120593119894 (119909119890) 119865119890
119894 = 1 2 3
(24)
where119901up119901119889119891119901119889119886119901119890119899 are the pressures on the upper surfacelower fore-body surface engine nacelle and lower aft-bodysurface respectively119865
119890is the force act on the elevator surface
120593119894(119909) is the mode shape which is calculated by the assumed
mode method
23Thrust Similar to the literature [20] the scramjet engineconsists of 3 sections a diffuser a combustor and an internalnozzle We assume that the airflow into the engine is parallelto the direction of the body axis By avoiding the mass flowimpinges at the inlet a translating cowl door is added toincrease the mass flow through the engine module Withquasi-one-dimensional aerothermoanalysis of the flow inthe propulsion system and the momentum theorem thethrust is given by
119879 = 119886(119881119890minus 119881infin) + (119901
119890minus 119901infin)119860119890
119887 (25)
where 119886is the air mass flow through the engine
119886is
dependent on the fore-body deflection Δ1205911 angle of attack
120572 and the freestream 119881119890and 119901
119890are the airflow velocity and
pressure at the engine exit respectively 119881infin
is the freestreamairflow velocity and 119860
119890119887 is the exit area per unit width
24 Equations of Motion Assume that the earth is flat andthe fuselage is free-free beam The equations of motion ofthe longitudinal dynamics for the hypersonic vehicle basedon Lagrangersquos equations are presented in [3] By ignoringthe weak inertial coupling terms the flexible mode shapesare orthogonal to the rigid body rotation which decouplesthe flexible modes and the rigid body modes and thecouplings between the rigid and flexible modes are includedin the aerodynamic forces and moments Then the simplifiedlongitudinal dynamics of a flexible vehicle written in thestability axis coordinate system are [8 10]
=1
119898(119879 cos120572 minus 119863) minus 119892 sin (120579 minus 120572)
=1
119898119881(minus119879 sin120572 minus 119871) + 119876 +
119892
119881cos (120579 minus 120572)
119902 =119868119910119910
119872
120579 = 119902
0 200 400 600 800 1000minus04
minus03
minus02
minus01
0
01
02
03
Position (01ft)
1st mode shape2nd mode shape3rd mode shape
Nor
mal
ized
disp
lace
men
t
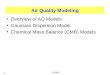
Figure 3 The mode shapes of the flexible structure
ℎ = 119881 sin (120579 minus 120572) 120578119894+ 2120577119894120596119894120578119894+ 1205962
119894120578119894= 119873119894 119894 = 1 2 3
(26)
where the rigid body states are 119881 120572 119902 120579 ℎ in which 119881120572 119902 120579 ℎ are the vehicle speed angle of attack pitch ratepitch acceleration and height respectivelyThe flexible statesare 120578
1 1205781 1205782 1205782 1205783 1205783 120577 is the structure damping 120596
119894is the
frequency and 120578119894is the generalized coordinate The control
input elevator deflection 120575119890 throttle 120601 and the couplings
between the rigid and flexible modes will appear explicitly inthe forces and moment 119871 119863 119879 119872 119873
119894which are calculated
in the above sections
3 Control-Oriented Modeling
31 Flexible Modes The natural frequencies of the flexiblestructure are the square roots of the eigenvalues of119872minus1119870 byusing the assumed modes method in Section 21 we obtainthe first three natural frequencies
1205961= 197437 rads 120596
2= 477851 rads
1205963= 948203 rads
(27)
The first three mode shapes are shown in Figure 3 thedeflections of the fore-body and aft-body are presented by
Δ1205911= Φ1(1205781 120578
21205783)119879 Δ120591
2= Φ2(1205781 120578
21205783)119879 (28)
where Φ1= (1205931015840
1(0) 1205931015840
2(0) 1205931015840
3(0)) and Φ
2= (1205931015840
1(119871) 1205931015840
2(119871)
1205931015840
3(119871))We assume that the generalized coordinates are constant
then Δ1205911
= minus23835 deg Δ1205912
= 07047 deg It can beseen that the fore-body deflection is changed significantlycompared to the aft-body deflection
32 Flexible and Viscous Effects For analyzing the contribu-tions of flexible and viscous effects to the aerodynamic we
6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Cowl doorShock
Shear layer
L
L1 L2 L3
1205911
1205912
1205913120575e
xB
zB
hen
Figure 1 The side view of X-43A HSV
extends the 3D flight dynamics analysis framework to includethe effects of flexibility and unsteady aerodynamics Basedon these models several studies on the robust guidance andnonlinear control systems design have been published inrecent years The controller design methods provide robuststability and performance for theHSV systems under varyingflight conditions [13ndash17]
The HSV model should contain the real physical char-acteristics and can be applied for nonlinear control Theunsteady flexible effects which are omitted in the existingcontrol-orientedmodels are significant in aeroservoelasticityanalysis For conducting a high-fidelity control-orientedmodel which can capture the inherent couplings of vehiclewe concentrate on the influence of flexible effects on theaerodynamic and propulsion system and present an air-breathing flexible HSV model by analyzing the physicalcharacteristics of vehicle flight Compressible flow theory andEckertrsquos reference temperature method are used to calculatethe complex forces andmoments which contain the unsteadyflexible effects and viscous effects By replacing the compli-cated aerodynamic forceswith curve fitting approximations asimplified control-oriented model is obtained with the inter-actions of aerodynamics flexible structure and propulsionsystem The stability analysis and pole-zero analysis are usedto analyze the dynamic characteristic of the vehicle modelThe results show that the control-oriented model reduces thecomplexity of the physics-based model and is convenient fornonlinear control
2 Hypersonic Vehicle Modeling
The hypersonic vehicle which typically has a tightly inte-grated airframe and scramjet propulsion system is quitedifferent from traditional aircraft Figure 1 shows the sideview of X-43A hypersonic vehicle and the literature [3]presents the detailed parameters of such vehicle The lowerfore-body surface of the vehicle has two functions one is toproduce lift andnose-uppitchingmoment another is to act asa compression system to slow the flow velocity and increasethe pressure and temperature at the inlet to the engine Theaft-body surface acts as an expansion nozzle to produce liftthrust and nose-down pitching moment [2] The scramjetengine is located underside the vehicle with a translating cowldoor which is used to maintain a shock-on-lip condition
for off-design flight conditions [3] In this vehicle theairframe and propulsion system cannot separate from eachother Furthermore the flexible structure bending affects thepressure distribution on the vehicle and the performanceof propulsion system Therefore the aerodynamic-flexiblestructure-propulsion interactions should be included in thehypersonic vehicle modeling
21 Flexible Structure We assume that the fuselage struc-ture is a uniform free-free beam and the displacementsare sufficiently small to satisfy Hookersquos Law and only thetransverse displacements of the beam are considered Theassumed modes approach [18] is used to calculate the naturalfrequencies and mode shapes of the vehicle This methodhas the advantage of simplicity and can achieve the desiredaccuracy The method is based on Lagrangersquos equations
119889
119889119905(120597119879
120597 119902119894
) minus120597119879
120597119902119894
+120597119881
120597119902119894
= 119891119894 119894 = 1 2 (1)
where 119879 is the total kinetic energy 119881 is the potential energyof the system and 119891
119894is the generalized force
The displacement of the flexible structure is
120596 (119909 119905) =
119899
sum
119894=1
Φ119894 (119909) 120578119894 (119905) (2)
where 120578119894is the generalized model coordinate and the func-
tions Φ119894(119909) 119894 = 1 2 119899 are the assumed modes which
must be linearly independent satisfy all of the geometricboundary conditions of the flexible structure and possessall the required derivatives The free-free beam meets thesatisfaction and we can take the mode shapes of the free-freebeam to be the assumed modes
Calculating the kinetic energy 119879 and potential energy 119881and substituting them into (1) then the Lagrangersquos equationscan become
119872 120578 + 119870120578 = 119891 (3)
where 119891= [1198911 sdot sdot sdot 119891119899] and the mass matrix 119872
119899times119899and the
stiffness matrix119870119899times119899
are symmetricBy setting 119891 = 0 120578 = minus120596
2120578 we can get the unforced
harmonic dynamics of the system (1205962119868 minus119872
minus1119870)120578 = 0
Then the natural frequencies of the flexible structure arethe square roots of the eigenvalues of 119872minus1119870 and the modeshapes are the combinations of the assumedmodesΦ
119894(119909) 119894 =
1 2 119899 with the coefficients of the eigenvectors of119872minus1119870The primary effects of flexible structure on the aerody-
namic and propulsion system are in the form of deflectionsof the fore-body and aft-body as shown in Figure 2 whichis a simplification figure of the flexible vehicle model andonly the first flexible mode is considered [3 7] Suppose thata bending deflection 120579 of the beam is sufficiently small thenwe can replace the deflection by the deflection angle
120579 (119909 119905) asymp tan 120579 (119909 119905) = 120597120596 (119909 119905)
120597119909 (4)
Mathematical Problems in Engineering 3
Flexible Rigid
Δ1205911120578 Δ1205912120578
Figure 2 The flexible vehicle model
By using the principle of separation of variables we obtainthe deflection caused by the 119894th flexible mode
120579119894 (119909 119905) =
120597
120597119909[120593119894 (119909) 120578119894 (119905)] =
119889120593119894 (119909)
119889119909120578119894 (119905) (5)
where 120593119894(119909) is the mode shape and 120578
119894(119905) is the generalized
coordinateConsidering 119899 flexible modes the fore-body deflection
can be written as
Δ1205911=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=0
120578119894 (119905) (6)
The aft-body deflection is
Δ1205912=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=119871
120578119894 (119905) (7)
Bending of the fore-body and aft-body together canchange the airflow characteristics of vehicle surfaces then itwill affect the engine inlet condition and alter the aerody-namic performance
22 Aerodynamic Model Aerodynamic modeling is animportant issue in hypersonic vehicle modeling The cou-plings between the flexible dynamics and rigid dynamicsalways occur through the aerodynamic forces and momentsOblique shock relations Prandtl-Meyer theory and pistontheory can be employed to estimate the aerodynamic forcesand moments on the vehicle
221 Aerodynamic Forces Shock and expansion waves arecommon physical phenomena in hypersonic flows By usingthe oblique shock and Prandtl-Meyer theory we can calculatethe pressure Mach number and temperature behind theshock or expansion wave [3] Furthermore the flexible effectsaffect the wave structure on the vehicle surface and canchange the angle of attack and control angles which in turnchange the pressures on vehicle surfaces
For the upper surface if 120572 + Δ1205911lt 1205911 an oblique shock
wave forms on the upper surface if120572+Δ1205911gt 1205911 an expansion
fan forms on the upper surface if 120572 + Δ1205911= 1205911 then the
upper surface experiences the freestream By using obliqueshock and Prandtl-Meyer theory we can obtain the force andmoment on the upper surface which can be resolved into 119909-and 119911-body axes components
119865119909up = minus119901up119871 tan 1205911
119865119911up = 119901up119871
119872up = 119911up119865119909up minus 119909up119865119911up (8)
Similar to the upper surface of the vehicle the forces andmoments on the lower fore-body surface engine nacelle andelevator surface can be obtained respectively The pressureover the aft-body surface is affected by the exhaust gases fromthe propulsion system By calculating the lower fore-bodysurface pressure the inner pressure in the engine and theposition of the shear layer we can get the force and momenton the aft-body surface [2] Then the resultant aerodynamicforces and moments on the 119909- and 119911-body axes 119865
119909119903 119865119911119903119872119903
are summarized from the individual components
222 Unsteady Flexible Effects When traveling at high speedthe interactions between the fluid and the flexible structureof such vehicle may lead to unsteady aerodynamic effectsUnderstanding the consequences of unsteady aerodynamiccaused by flexible effects is significant to the development offlexible vehicle modeling
Assuming that the flexible effects only occur in the z-direction and the engine is rigid the unsteady flexible effectshere are considered as small perturbations of deformationvelocity and angular rate
(119909 119905) =
infin
sum
119894=1
120593119894 (119909) 120578
119894 (119905) = Φ sdot 120578 (9)
120579 =
119899
sum
119894=1
119889120593119894 (119909)
119889119909120578119894 (119905) = Φ sdot 120578 (10)
Piston theory is applied to compute the unsteady aero-dynamic effects behind oblique shock waves and expansionfans The pressure on the surface is given by [7]
119875
119875119894
= (1 +120574 minus 1
2
119908119894
119886119894
)
2120574(120574minus1)
(11)
According to the first-order linear piston theory theinfinitesimal force due to the pressure is
119889119865 = minus119875119889119860119899 = minus (119875119894+ 120588119894119886119894[119881119894sdot 119899]) 119889119860119899 (12)
where 119875119894is the local pressure behind the shock or expansion
wave 119881119894is the velocity of the surface to the steady flow 120588
119894 119886119894
are the atmospheric density and sonic speed respectively 119899is the outward pointing surface normal and 119889119860 is the surfaceelement
For the upper surface the velocity due to the flexibledeformation velocity and angular rate perturbations is
119881up = 1198811cos 1205911
997888119894 + (119881
1sin 1205911+ (119909 119905))
997888119896 + (Φ sdot 120578) times 119903up
(13)
where 1198811 119903up are the velocity of the flow and the position
vector of a point on the upper surface respectively
4 Mathematical Problems in Engineering
Substituting the velocity 119881up into (12) the unsteady forceand moment on the upper surface can be written as
Δ119865up119909 = int
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909) + Φ sdot 120578] sin 120591
1119889119909
Δ119865up119911 = minusint
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909)
+Φ sdot 120578] cos 1205911119889119909
Δ119872up = 119911upΔ119865up119909 minus 119909upΔ119865up119911
(14)
For the lower fore-body surface the unsteady force andmoment are given by
Δ119865119889119891119909
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] sin 1205912119889119909
Δ119865119889119891119911
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] cos 1205912119889119909
Δ119872119889119891= 119911119889119891Δ119865119889119891119909
minus 119909119889119891Δ119865119889119891119911
(15)
For the lower aft-body surface the unsteady force andmoment are given by
Δ119865119889119886119909
= int
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times sin (1205911+ 1205913) 119889119909
Δ119865119889119886119911
= minusint
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times cos (1205911+ 1205913) 119889119909
Δ119872119889119886= minus 119911
119889119886Δ119865119889119886119909
minus 119909119889119886Δ119865119889119886119911
(16)
Summarize the unsteady forces and moments on eachsurface and denote 119865
119909fle 119865119911fle119872fle as the unsteady flexibleaerodynamic of vehicle then we can get the total body forceand moment
119865119909= 119865119909119903+ 119865119909fle
119865119911= 119865119911119903+ 119865119911fle
119872 = 119872119903+119872fle
(17)
223 Viscous Effects The inviscid flow cannot describe thereal airflow characteristicsWith highMach flight the viscousfluid moves relatively to the vehicle which can generateviscous friction and can result in boundary layer effect andaerodynamic heating The flow temperature changes and itis difficult to calculate the aerodynamic parameters insidethe boundary layer Similar to the literature [19] Eckertrsquosreference temperaturemethod is used to compute the viscousskin friction on each surface of the vehicle The referencetemperaturewhich is a function of theMach number (119872) andtemperature (119879) at the edge of the boundary layer as well asthe wall (skin) temperature 119879
119908can be written as
119879lowast= 119879[1 +119872
2+ 058 (
119879119908
119879minus 1)] (18)
Based on the reference temperature we can calculatethe density 120588lowast the viscosity 120583lowast Reynolds number Relowast andthe skin friction coefficient 119862
119891with the perfect gas law and
Sutherlandrsquos formulaThen the shear stress on the surface canbe computed by
120591119908= (
1
2120588infin1198812
infin)119862119891 (19)
Integrating (19) the skin friction drag can be given by
119865vis = int120591119908119889119909 (20)
Then the normal and axial forces are obtained as follows
119873vis = 119865vis sin120573 119860vis = 119865vis cos120573 (21)
where 120573 is the surface inclination to the body axisBy using the coordinate transformation the additional
lift drag and moment of viscous effects can be written as
119871vis = 119873vis cos120572 minus 119860vis sin120572
119863vis = 119873vis sin120572 minus 119860vis cos120572
119872vis = 119873vis119909 + 119860vis119911
(22)
We consider the viscous skin friction on the uppersurface lower fore-body surface lower aft-body surfacesurface below the engine nacelle and control surfaces Bycalculating the additional lift drag and moment on eachsurface we can get the total additional lift119871vis additional drag119863vis and additional moment119872vis
Translating the force 119865119909 119865119911into the lift and drag acting
on the vehicle and taking the viscous effects into account thetotal lift drag and pitching moment are
119871 = 119865119909sin120572 minus 119865
119911cos120572 + 119871vis
119863 = minus 119865119909cos120572 minus 119865
119911sin120572 + 119863vis
119872 = 119872119903+119872fle +119872vis
(23)
The flexible and viscous effects are included in force andmoment formulations in (23) If we assume a rigid structuresuch that 120578
1= 1205782= 1205783= 1205781= 1205782= 1205783= 0 and viscous effect
is excluded then (23) is steady aerodynamic forces of a rigidbody vehicle
Mathematical Problems in Engineering 5
224 Generalized Forces In this paper we present the load-ings on the upper surface lower surface and control surfacethe generalized forces for the first three flexible modes can bewritten as
119873119894= int
119871
0
120593119894 (119909) 119901up 119889119909 minus int
119871119891
0
120593119894 (119909) 119901119889119891 119889119909
minus int
119871
119871119891+119871119899
120593119894 (119909) 119901119889119886 119889119909 minus int
119871119899
119871119891
120593119894 (119909) 119901119890119899 119889119909 + 120593119894 (119909119890) 119865119890
119894 = 1 2 3
(24)
where119901up119901119889119891119901119889119886119901119890119899 are the pressures on the upper surfacelower fore-body surface engine nacelle and lower aft-bodysurface respectively119865
119890is the force act on the elevator surface
120593119894(119909) is the mode shape which is calculated by the assumed
mode method
23Thrust Similar to the literature [20] the scramjet engineconsists of 3 sections a diffuser a combustor and an internalnozzle We assume that the airflow into the engine is parallelto the direction of the body axis By avoiding the mass flowimpinges at the inlet a translating cowl door is added toincrease the mass flow through the engine module Withquasi-one-dimensional aerothermoanalysis of the flow inthe propulsion system and the momentum theorem thethrust is given by
119879 = 119886(119881119890minus 119881infin) + (119901
119890minus 119901infin)119860119890
119887 (25)
where 119886is the air mass flow through the engine
119886is
dependent on the fore-body deflection Δ1205911 angle of attack
120572 and the freestream 119881119890and 119901
119890are the airflow velocity and
pressure at the engine exit respectively 119881infin
is the freestreamairflow velocity and 119860
119890119887 is the exit area per unit width
24 Equations of Motion Assume that the earth is flat andthe fuselage is free-free beam The equations of motion ofthe longitudinal dynamics for the hypersonic vehicle basedon Lagrangersquos equations are presented in [3] By ignoringthe weak inertial coupling terms the flexible mode shapesare orthogonal to the rigid body rotation which decouplesthe flexible modes and the rigid body modes and thecouplings between the rigid and flexible modes are includedin the aerodynamic forces and moments Then the simplifiedlongitudinal dynamics of a flexible vehicle written in thestability axis coordinate system are [8 10]
=1
119898(119879 cos120572 minus 119863) minus 119892 sin (120579 minus 120572)
=1
119898119881(minus119879 sin120572 minus 119871) + 119876 +
119892
119881cos (120579 minus 120572)
119902 =119868119910119910
119872
120579 = 119902
0 200 400 600 800 1000minus04
minus03
minus02
minus01
0
01
02
03
Position (01ft)
1st mode shape2nd mode shape3rd mode shape
Nor
mal
ized
disp
lace
men
t
Figure 3 The mode shapes of the flexible structure
ℎ = 119881 sin (120579 minus 120572) 120578119894+ 2120577119894120596119894120578119894+ 1205962
119894120578119894= 119873119894 119894 = 1 2 3
(26)
where the rigid body states are 119881 120572 119902 120579 ℎ in which 119881120572 119902 120579 ℎ are the vehicle speed angle of attack pitch ratepitch acceleration and height respectivelyThe flexible statesare 120578
1 1205781 1205782 1205782 1205783 1205783 120577 is the structure damping 120596
119894is the
frequency and 120578119894is the generalized coordinate The control
input elevator deflection 120575119890 throttle 120601 and the couplings
between the rigid and flexible modes will appear explicitly inthe forces and moment 119871 119863 119879 119872 119873
119894which are calculated
in the above sections
3 Control-Oriented Modeling
31 Flexible Modes The natural frequencies of the flexiblestructure are the square roots of the eigenvalues of119872minus1119870 byusing the assumed modes method in Section 21 we obtainthe first three natural frequencies
1205961= 197437 rads 120596
2= 477851 rads
1205963= 948203 rads
(27)
The first three mode shapes are shown in Figure 3 thedeflections of the fore-body and aft-body are presented by
Δ1205911= Φ1(1205781 120578
21205783)119879 Δ120591
2= Φ2(1205781 120578
21205783)119879 (28)
where Φ1= (1205931015840
1(0) 1205931015840
2(0) 1205931015840
3(0)) and Φ
2= (1205931015840
1(119871) 1205931015840
2(119871)
1205931015840
3(119871))We assume that the generalized coordinates are constant
then Δ1205911
= minus23835 deg Δ1205912
= 07047 deg It can beseen that the fore-body deflection is changed significantlycompared to the aft-body deflection
32 Flexible and Viscous Effects For analyzing the contribu-tions of flexible and viscous effects to the aerodynamic we
6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Flexible Rigid
Δ1205911120578 Δ1205912120578
Figure 2 The flexible vehicle model
By using the principle of separation of variables we obtainthe deflection caused by the 119894th flexible mode
120579119894 (119909 119905) =
120597
120597119909[120593119894 (119909) 120578119894 (119905)] =
119889120593119894 (119909)
119889119909120578119894 (119905) (5)
where 120593119894(119909) is the mode shape and 120578
119894(119905) is the generalized
coordinateConsidering 119899 flexible modes the fore-body deflection
can be written as
Δ1205911=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=0
120578119894 (119905) (6)
The aft-body deflection is
Δ1205912=
119899
sum
119894=1
119889120593119894 (119909)
119889119909
1003816100381610038161003816100381610038161003816119909=119871
120578119894 (119905) (7)
Bending of the fore-body and aft-body together canchange the airflow characteristics of vehicle surfaces then itwill affect the engine inlet condition and alter the aerody-namic performance
22 Aerodynamic Model Aerodynamic modeling is animportant issue in hypersonic vehicle modeling The cou-plings between the flexible dynamics and rigid dynamicsalways occur through the aerodynamic forces and momentsOblique shock relations Prandtl-Meyer theory and pistontheory can be employed to estimate the aerodynamic forcesand moments on the vehicle
221 Aerodynamic Forces Shock and expansion waves arecommon physical phenomena in hypersonic flows By usingthe oblique shock and Prandtl-Meyer theory we can calculatethe pressure Mach number and temperature behind theshock or expansion wave [3] Furthermore the flexible effectsaffect the wave structure on the vehicle surface and canchange the angle of attack and control angles which in turnchange the pressures on vehicle surfaces
For the upper surface if 120572 + Δ1205911lt 1205911 an oblique shock
wave forms on the upper surface if120572+Δ1205911gt 1205911 an expansion
fan forms on the upper surface if 120572 + Δ1205911= 1205911 then the
upper surface experiences the freestream By using obliqueshock and Prandtl-Meyer theory we can obtain the force andmoment on the upper surface which can be resolved into 119909-and 119911-body axes components
119865119909up = minus119901up119871 tan 1205911
119865119911up = 119901up119871
119872up = 119911up119865119909up minus 119909up119865119911up (8)
Similar to the upper surface of the vehicle the forces andmoments on the lower fore-body surface engine nacelle andelevator surface can be obtained respectively The pressureover the aft-body surface is affected by the exhaust gases fromthe propulsion system By calculating the lower fore-bodysurface pressure the inner pressure in the engine and theposition of the shear layer we can get the force and momenton the aft-body surface [2] Then the resultant aerodynamicforces and moments on the 119909- and 119911-body axes 119865
119909119903 119865119911119903119872119903
are summarized from the individual components
222 Unsteady Flexible Effects When traveling at high speedthe interactions between the fluid and the flexible structureof such vehicle may lead to unsteady aerodynamic effectsUnderstanding the consequences of unsteady aerodynamiccaused by flexible effects is significant to the development offlexible vehicle modeling
Assuming that the flexible effects only occur in the z-direction and the engine is rigid the unsteady flexible effectshere are considered as small perturbations of deformationvelocity and angular rate
(119909 119905) =
infin
sum
119894=1
120593119894 (119909) 120578
119894 (119905) = Φ sdot 120578 (9)
120579 =
119899
sum
119894=1
119889120593119894 (119909)
119889119909120578119894 (119905) = Φ sdot 120578 (10)
Piston theory is applied to compute the unsteady aero-dynamic effects behind oblique shock waves and expansionfans The pressure on the surface is given by [7]
119875
119875119894
= (1 +120574 minus 1
2
119908119894
119886119894
)
2120574(120574minus1)
(11)
According to the first-order linear piston theory theinfinitesimal force due to the pressure is
119889119865 = minus119875119889119860119899 = minus (119875119894+ 120588119894119886119894[119881119894sdot 119899]) 119889119860119899 (12)
where 119875119894is the local pressure behind the shock or expansion
wave 119881119894is the velocity of the surface to the steady flow 120588
119894 119886119894
are the atmospheric density and sonic speed respectively 119899is the outward pointing surface normal and 119889119860 is the surfaceelement
For the upper surface the velocity due to the flexibledeformation velocity and angular rate perturbations is
119881up = 1198811cos 1205911
997888119894 + (119881
1sin 1205911+ (119909 119905))
997888119896 + (Φ sdot 120578) times 119903up
(13)
where 1198811 119903up are the velocity of the flow and the position
vector of a point on the upper surface respectively
4 Mathematical Problems in Engineering
Substituting the velocity 119881up into (12) the unsteady forceand moment on the upper surface can be written as
Δ119865up119909 = int
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909) + Φ sdot 120578] sin 120591
1119889119909
Δ119865up119911 = minusint
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909)
+Φ sdot 120578] cos 1205911119889119909
Δ119872up = 119911upΔ119865up119909 minus 119909upΔ119865up119911
(14)
For the lower fore-body surface the unsteady force andmoment are given by
Δ119865119889119891119909
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] sin 1205912119889119909
Δ119865119889119891119911
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] cos 1205912119889119909
Δ119872119889119891= 119911119889119891Δ119865119889119891119909
minus 119909119889119891Δ119865119889119891119911
(15)
For the lower aft-body surface the unsteady force andmoment are given by
Δ119865119889119886119909
= int
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times sin (1205911+ 1205913) 119889119909
Δ119865119889119886119911
= minusint
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times cos (1205911+ 1205913) 119889119909
Δ119872119889119886= minus 119911
119889119886Δ119865119889119886119909
minus 119909119889119886Δ119865119889119886119911
(16)
Summarize the unsteady forces and moments on eachsurface and denote 119865
119909fle 119865119911fle119872fle as the unsteady flexibleaerodynamic of vehicle then we can get the total body forceand moment
119865119909= 119865119909119903+ 119865119909fle
119865119911= 119865119911119903+ 119865119911fle
119872 = 119872119903+119872fle
(17)
223 Viscous Effects The inviscid flow cannot describe thereal airflow characteristicsWith highMach flight the viscousfluid moves relatively to the vehicle which can generateviscous friction and can result in boundary layer effect andaerodynamic heating The flow temperature changes and itis difficult to calculate the aerodynamic parameters insidethe boundary layer Similar to the literature [19] Eckertrsquosreference temperaturemethod is used to compute the viscousskin friction on each surface of the vehicle The referencetemperaturewhich is a function of theMach number (119872) andtemperature (119879) at the edge of the boundary layer as well asthe wall (skin) temperature 119879
119908can be written as
119879lowast= 119879[1 +119872
2+ 058 (
119879119908
119879minus 1)] (18)
Based on the reference temperature we can calculatethe density 120588lowast the viscosity 120583lowast Reynolds number Relowast andthe skin friction coefficient 119862
119891with the perfect gas law and
Sutherlandrsquos formulaThen the shear stress on the surface canbe computed by
120591119908= (
1
2120588infin1198812
infin)119862119891 (19)
Integrating (19) the skin friction drag can be given by
119865vis = int120591119908119889119909 (20)
Then the normal and axial forces are obtained as follows
119873vis = 119865vis sin120573 119860vis = 119865vis cos120573 (21)
where 120573 is the surface inclination to the body axisBy using the coordinate transformation the additional
lift drag and moment of viscous effects can be written as
119871vis = 119873vis cos120572 minus 119860vis sin120572
119863vis = 119873vis sin120572 minus 119860vis cos120572
119872vis = 119873vis119909 + 119860vis119911
(22)
We consider the viscous skin friction on the uppersurface lower fore-body surface lower aft-body surfacesurface below the engine nacelle and control surfaces Bycalculating the additional lift drag and moment on eachsurface we can get the total additional lift119871vis additional drag119863vis and additional moment119872vis
Translating the force 119865119909 119865119911into the lift and drag acting
on the vehicle and taking the viscous effects into account thetotal lift drag and pitching moment are
119871 = 119865119909sin120572 minus 119865
119911cos120572 + 119871vis
119863 = minus 119865119909cos120572 minus 119865
119911sin120572 + 119863vis
119872 = 119872119903+119872fle +119872vis
(23)
The flexible and viscous effects are included in force andmoment formulations in (23) If we assume a rigid structuresuch that 120578
1= 1205782= 1205783= 1205781= 1205782= 1205783= 0 and viscous effect
is excluded then (23) is steady aerodynamic forces of a rigidbody vehicle
Mathematical Problems in Engineering 5
224 Generalized Forces In this paper we present the load-ings on the upper surface lower surface and control surfacethe generalized forces for the first three flexible modes can bewritten as
119873119894= int
119871
0
120593119894 (119909) 119901up 119889119909 minus int
119871119891
0
120593119894 (119909) 119901119889119891 119889119909
minus int
119871
119871119891+119871119899
120593119894 (119909) 119901119889119886 119889119909 minus int
119871119899
119871119891
120593119894 (119909) 119901119890119899 119889119909 + 120593119894 (119909119890) 119865119890
119894 = 1 2 3
(24)
where119901up119901119889119891119901119889119886119901119890119899 are the pressures on the upper surfacelower fore-body surface engine nacelle and lower aft-bodysurface respectively119865
119890is the force act on the elevator surface
120593119894(119909) is the mode shape which is calculated by the assumed
mode method
23Thrust Similar to the literature [20] the scramjet engineconsists of 3 sections a diffuser a combustor and an internalnozzle We assume that the airflow into the engine is parallelto the direction of the body axis By avoiding the mass flowimpinges at the inlet a translating cowl door is added toincrease the mass flow through the engine module Withquasi-one-dimensional aerothermoanalysis of the flow inthe propulsion system and the momentum theorem thethrust is given by
119879 = 119886(119881119890minus 119881infin) + (119901
119890minus 119901infin)119860119890
119887 (25)
where 119886is the air mass flow through the engine
119886is
dependent on the fore-body deflection Δ1205911 angle of attack
120572 and the freestream 119881119890and 119901
119890are the airflow velocity and
pressure at the engine exit respectively 119881infin
is the freestreamairflow velocity and 119860
119890119887 is the exit area per unit width
24 Equations of Motion Assume that the earth is flat andthe fuselage is free-free beam The equations of motion ofthe longitudinal dynamics for the hypersonic vehicle basedon Lagrangersquos equations are presented in [3] By ignoringthe weak inertial coupling terms the flexible mode shapesare orthogonal to the rigid body rotation which decouplesthe flexible modes and the rigid body modes and thecouplings between the rigid and flexible modes are includedin the aerodynamic forces and moments Then the simplifiedlongitudinal dynamics of a flexible vehicle written in thestability axis coordinate system are [8 10]
=1
119898(119879 cos120572 minus 119863) minus 119892 sin (120579 minus 120572)
=1
119898119881(minus119879 sin120572 minus 119871) + 119876 +
119892
119881cos (120579 minus 120572)
119902 =119868119910119910
119872
120579 = 119902
0 200 400 600 800 1000minus04
minus03
minus02
minus01
0
01
02
03
Position (01ft)
1st mode shape2nd mode shape3rd mode shape
Nor
mal
ized
disp
lace
men
t
Figure 3 The mode shapes of the flexible structure
ℎ = 119881 sin (120579 minus 120572) 120578119894+ 2120577119894120596119894120578119894+ 1205962
119894120578119894= 119873119894 119894 = 1 2 3
(26)
where the rigid body states are 119881 120572 119902 120579 ℎ in which 119881120572 119902 120579 ℎ are the vehicle speed angle of attack pitch ratepitch acceleration and height respectivelyThe flexible statesare 120578
1 1205781 1205782 1205782 1205783 1205783 120577 is the structure damping 120596
119894is the
frequency and 120578119894is the generalized coordinate The control
input elevator deflection 120575119890 throttle 120601 and the couplings
between the rigid and flexible modes will appear explicitly inthe forces and moment 119871 119863 119879 119872 119873
119894which are calculated
in the above sections
3 Control-Oriented Modeling
31 Flexible Modes The natural frequencies of the flexiblestructure are the square roots of the eigenvalues of119872minus1119870 byusing the assumed modes method in Section 21 we obtainthe first three natural frequencies
1205961= 197437 rads 120596
2= 477851 rads
1205963= 948203 rads
(27)
The first three mode shapes are shown in Figure 3 thedeflections of the fore-body and aft-body are presented by
Δ1205911= Φ1(1205781 120578
21205783)119879 Δ120591
2= Φ2(1205781 120578
21205783)119879 (28)
where Φ1= (1205931015840
1(0) 1205931015840
2(0) 1205931015840
3(0)) and Φ
2= (1205931015840
1(119871) 1205931015840
2(119871)
1205931015840
3(119871))We assume that the generalized coordinates are constant
then Δ1205911
= minus23835 deg Δ1205912
= 07047 deg It can beseen that the fore-body deflection is changed significantlycompared to the aft-body deflection
32 Flexible and Viscous Effects For analyzing the contribu-tions of flexible and viscous effects to the aerodynamic we
6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Substituting the velocity 119881up into (12) the unsteady forceand moment on the upper surface can be written as
Δ119865up119909 = int
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909) + Φ sdot 120578] sin 120591
1119889119909
Δ119865up119911 = minusint
119871
0
120588up119886up [(Φ sdot 120578) (119909 tan 12059121minus 119909)
+Φ sdot 120578] cos 1205911119889119909
Δ119872up = 119911upΔ119865up119909 minus 119909upΔ119865up119911
(14)
For the lower fore-body surface the unsteady force andmoment are given by
Δ119865119889119891119909
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] sin 1205912119889119909
Δ119865119889119891119911
= int
1198711
0
120588119889119891120572119889119891[(Φ sdot 120578) (119909 tan 1205912
2minus 119909)
+Φ sdot 120578] cos 1205912119889119909
Δ119872119889119891= 119911119889119891Δ119865119889119891119909
minus 119909119889119891Δ119865119889119891119911
(15)
For the lower aft-body surface the unsteady force andmoment are given by
Δ119865119889119886119909
= int
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times sin (1205911+ 1205913) 119889119909
Δ119865119889119886119911
= minusint
119871
1198711+1198712
120588119889119886119886119889119886
times Φ sdot 120578 [(119871 minus 119909) tan (1205911 + 1205913) minus 119871 tan 1205911]
times sin (1205911+ 1205913) + (minus (Φ sdot 120578) 119909 + Φ sdot 120578)
times cos (1205911+ 1205913) 119889119909
Δ119872119889119886= minus 119911
119889119886Δ119865119889119886119909
minus 119909119889119886Δ119865119889119886119911
(16)
Summarize the unsteady forces and moments on eachsurface and denote 119865
119909fle 119865119911fle119872fle as the unsteady flexibleaerodynamic of vehicle then we can get the total body forceand moment
119865119909= 119865119909119903+ 119865119909fle
119865119911= 119865119911119903+ 119865119911fle
119872 = 119872119903+119872fle
(17)
223 Viscous Effects The inviscid flow cannot describe thereal airflow characteristicsWith highMach flight the viscousfluid moves relatively to the vehicle which can generateviscous friction and can result in boundary layer effect andaerodynamic heating The flow temperature changes and itis difficult to calculate the aerodynamic parameters insidethe boundary layer Similar to the literature [19] Eckertrsquosreference temperaturemethod is used to compute the viscousskin friction on each surface of the vehicle The referencetemperaturewhich is a function of theMach number (119872) andtemperature (119879) at the edge of the boundary layer as well asthe wall (skin) temperature 119879
119908can be written as
119879lowast= 119879[1 +119872
2+ 058 (
119879119908
119879minus 1)] (18)
Based on the reference temperature we can calculatethe density 120588lowast the viscosity 120583lowast Reynolds number Relowast andthe skin friction coefficient 119862
119891with the perfect gas law and
Sutherlandrsquos formulaThen the shear stress on the surface canbe computed by
120591119908= (
1
2120588infin1198812
infin)119862119891 (19)
Integrating (19) the skin friction drag can be given by
119865vis = int120591119908119889119909 (20)
Then the normal and axial forces are obtained as follows
119873vis = 119865vis sin120573 119860vis = 119865vis cos120573 (21)
where 120573 is the surface inclination to the body axisBy using the coordinate transformation the additional
lift drag and moment of viscous effects can be written as
119871vis = 119873vis cos120572 minus 119860vis sin120572
119863vis = 119873vis sin120572 minus 119860vis cos120572
119872vis = 119873vis119909 + 119860vis119911
(22)
We consider the viscous skin friction on the uppersurface lower fore-body surface lower aft-body surfacesurface below the engine nacelle and control surfaces Bycalculating the additional lift drag and moment on eachsurface we can get the total additional lift119871vis additional drag119863vis and additional moment119872vis
Translating the force 119865119909 119865119911into the lift and drag acting
on the vehicle and taking the viscous effects into account thetotal lift drag and pitching moment are
119871 = 119865119909sin120572 minus 119865
119911cos120572 + 119871vis
119863 = minus 119865119909cos120572 minus 119865
119911sin120572 + 119863vis
119872 = 119872119903+119872fle +119872vis
(23)
The flexible and viscous effects are included in force andmoment formulations in (23) If we assume a rigid structuresuch that 120578
1= 1205782= 1205783= 1205781= 1205782= 1205783= 0 and viscous effect
is excluded then (23) is steady aerodynamic forces of a rigidbody vehicle
Mathematical Problems in Engineering 5
224 Generalized Forces In this paper we present the load-ings on the upper surface lower surface and control surfacethe generalized forces for the first three flexible modes can bewritten as
119873119894= int
119871
0
120593119894 (119909) 119901up 119889119909 minus int
119871119891
0
120593119894 (119909) 119901119889119891 119889119909
minus int
119871
119871119891+119871119899
120593119894 (119909) 119901119889119886 119889119909 minus int
119871119899
119871119891
120593119894 (119909) 119901119890119899 119889119909 + 120593119894 (119909119890) 119865119890
119894 = 1 2 3
(24)
where119901up119901119889119891119901119889119886119901119890119899 are the pressures on the upper surfacelower fore-body surface engine nacelle and lower aft-bodysurface respectively119865
119890is the force act on the elevator surface
120593119894(119909) is the mode shape which is calculated by the assumed
mode method
23Thrust Similar to the literature [20] the scramjet engineconsists of 3 sections a diffuser a combustor and an internalnozzle We assume that the airflow into the engine is parallelto the direction of the body axis By avoiding the mass flowimpinges at the inlet a translating cowl door is added toincrease the mass flow through the engine module Withquasi-one-dimensional aerothermoanalysis of the flow inthe propulsion system and the momentum theorem thethrust is given by
119879 = 119886(119881119890minus 119881infin) + (119901
119890minus 119901infin)119860119890
119887 (25)
where 119886is the air mass flow through the engine
119886is
dependent on the fore-body deflection Δ1205911 angle of attack
120572 and the freestream 119881119890and 119901
119890are the airflow velocity and
pressure at the engine exit respectively 119881infin
is the freestreamairflow velocity and 119860
119890119887 is the exit area per unit width
24 Equations of Motion Assume that the earth is flat andthe fuselage is free-free beam The equations of motion ofthe longitudinal dynamics for the hypersonic vehicle basedon Lagrangersquos equations are presented in [3] By ignoringthe weak inertial coupling terms the flexible mode shapesare orthogonal to the rigid body rotation which decouplesthe flexible modes and the rigid body modes and thecouplings between the rigid and flexible modes are includedin the aerodynamic forces and moments Then the simplifiedlongitudinal dynamics of a flexible vehicle written in thestability axis coordinate system are [8 10]
=1
119898(119879 cos120572 minus 119863) minus 119892 sin (120579 minus 120572)
=1
119898119881(minus119879 sin120572 minus 119871) + 119876 +
119892
119881cos (120579 minus 120572)
119902 =119868119910119910
119872
120579 = 119902
0 200 400 600 800 1000minus04
minus03
minus02
minus01
0
01
02
03
Position (01ft)
1st mode shape2nd mode shape3rd mode shape
Nor
mal
ized
disp
lace
men
t
Figure 3 The mode shapes of the flexible structure
ℎ = 119881 sin (120579 minus 120572) 120578119894+ 2120577119894120596119894120578119894+ 1205962
119894120578119894= 119873119894 119894 = 1 2 3
(26)
where the rigid body states are 119881 120572 119902 120579 ℎ in which 119881120572 119902 120579 ℎ are the vehicle speed angle of attack pitch ratepitch acceleration and height respectivelyThe flexible statesare 120578
1 1205781 1205782 1205782 1205783 1205783 120577 is the structure damping 120596
119894is the
frequency and 120578119894is the generalized coordinate The control
input elevator deflection 120575119890 throttle 120601 and the couplings
between the rigid and flexible modes will appear explicitly inthe forces and moment 119871 119863 119879 119872 119873
119894which are calculated
in the above sections
3 Control-Oriented Modeling
31 Flexible Modes The natural frequencies of the flexiblestructure are the square roots of the eigenvalues of119872minus1119870 byusing the assumed modes method in Section 21 we obtainthe first three natural frequencies
1205961= 197437 rads 120596
2= 477851 rads
1205963= 948203 rads
(27)
The first three mode shapes are shown in Figure 3 thedeflections of the fore-body and aft-body are presented by
Δ1205911= Φ1(1205781 120578
21205783)119879 Δ120591
2= Φ2(1205781 120578
21205783)119879 (28)
where Φ1= (1205931015840
1(0) 1205931015840
2(0) 1205931015840
3(0)) and Φ
2= (1205931015840
1(119871) 1205931015840
2(119871)
1205931015840
3(119871))We assume that the generalized coordinates are constant
then Δ1205911
= minus23835 deg Δ1205912
= 07047 deg It can beseen that the fore-body deflection is changed significantlycompared to the aft-body deflection
32 Flexible and Viscous Effects For analyzing the contribu-tions of flexible and viscous effects to the aerodynamic we
6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
224 Generalized Forces In this paper we present the load-ings on the upper surface lower surface and control surfacethe generalized forces for the first three flexible modes can bewritten as
119873119894= int
119871
0
120593119894 (119909) 119901up 119889119909 minus int
119871119891
0
120593119894 (119909) 119901119889119891 119889119909
minus int
119871
119871119891+119871119899
120593119894 (119909) 119901119889119886 119889119909 minus int
119871119899
119871119891
120593119894 (119909) 119901119890119899 119889119909 + 120593119894 (119909119890) 119865119890
119894 = 1 2 3
(24)
where119901up119901119889119891119901119889119886119901119890119899 are the pressures on the upper surfacelower fore-body surface engine nacelle and lower aft-bodysurface respectively119865
119890is the force act on the elevator surface
120593119894(119909) is the mode shape which is calculated by the assumed
mode method
23Thrust Similar to the literature [20] the scramjet engineconsists of 3 sections a diffuser a combustor and an internalnozzle We assume that the airflow into the engine is parallelto the direction of the body axis By avoiding the mass flowimpinges at the inlet a translating cowl door is added toincrease the mass flow through the engine module Withquasi-one-dimensional aerothermoanalysis of the flow inthe propulsion system and the momentum theorem thethrust is given by
119879 = 119886(119881119890minus 119881infin) + (119901
119890minus 119901infin)119860119890
119887 (25)
where 119886is the air mass flow through the engine
119886is
dependent on the fore-body deflection Δ1205911 angle of attack
120572 and the freestream 119881119890and 119901
119890are the airflow velocity and
pressure at the engine exit respectively 119881infin
is the freestreamairflow velocity and 119860
119890119887 is the exit area per unit width
24 Equations of Motion Assume that the earth is flat andthe fuselage is free-free beam The equations of motion ofthe longitudinal dynamics for the hypersonic vehicle basedon Lagrangersquos equations are presented in [3] By ignoringthe weak inertial coupling terms the flexible mode shapesare orthogonal to the rigid body rotation which decouplesthe flexible modes and the rigid body modes and thecouplings between the rigid and flexible modes are includedin the aerodynamic forces and moments Then the simplifiedlongitudinal dynamics of a flexible vehicle written in thestability axis coordinate system are [8 10]
=1
119898(119879 cos120572 minus 119863) minus 119892 sin (120579 minus 120572)
=1
119898119881(minus119879 sin120572 minus 119871) + 119876 +
119892
119881cos (120579 minus 120572)
119902 =119868119910119910
119872
120579 = 119902
0 200 400 600 800 1000minus04
minus03
minus02
minus01
0
01
02
03
Position (01ft)
1st mode shape2nd mode shape3rd mode shape
Nor
mal
ized
disp
lace
men
t
Figure 3 The mode shapes of the flexible structure
ℎ = 119881 sin (120579 minus 120572) 120578119894+ 2120577119894120596119894120578119894+ 1205962
119894120578119894= 119873119894 119894 = 1 2 3
(26)
where the rigid body states are 119881 120572 119902 120579 ℎ in which 119881120572 119902 120579 ℎ are the vehicle speed angle of attack pitch ratepitch acceleration and height respectivelyThe flexible statesare 120578
1 1205781 1205782 1205782 1205783 1205783 120577 is the structure damping 120596
119894is the
frequency and 120578119894is the generalized coordinate The control
input elevator deflection 120575119890 throttle 120601 and the couplings
between the rigid and flexible modes will appear explicitly inthe forces and moment 119871 119863 119879 119872 119873
119894which are calculated
in the above sections
3 Control-Oriented Modeling
31 Flexible Modes The natural frequencies of the flexiblestructure are the square roots of the eigenvalues of119872minus1119870 byusing the assumed modes method in Section 21 we obtainthe first three natural frequencies
1205961= 197437 rads 120596
2= 477851 rads
1205963= 948203 rads
(27)
The first three mode shapes are shown in Figure 3 thedeflections of the fore-body and aft-body are presented by
Δ1205911= Φ1(1205781 120578
21205783)119879 Δ120591
2= Φ2(1205781 120578
21205783)119879 (28)
where Φ1= (1205931015840
1(0) 1205931015840
2(0) 1205931015840
3(0)) and Φ
2= (1205931015840
1(119871) 1205931015840
2(119871)
1205931015840
3(119871))We assume that the generalized coordinates are constant
then Δ1205911
= minus23835 deg Δ1205912
= 07047 deg It can beseen that the fore-body deflection is changed significantlycompared to the aft-body deflection
32 Flexible and Viscous Effects For analyzing the contribu-tions of flexible and viscous effects to the aerodynamic we
6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Figure 4 The trend of lift with AOA
Figure 5 The trend of drag with AOA
observe the trend of forces with angle of attack and othervariables frozen at certain conditions From Figures 4 and 5we can see that the viscous drag is large compared to the liftThis is because the viscous forces act parallel to the surfaceand there is an increase in the drag acting on the vehicleOn the other hand the flexible effects are relatively smallcompared to the viscous effects
We can conclude that the viscous effects are significantcontributor to the drag and should be included in theaerodynamic modeling The flexible effects do not makesignificant contribution to the forces but cannot be ignoredhere because the lowest frequency will change with theaerodynamic heating and mass decreasing [17] and will beclose to the rigid modes which can bring the couplingbetween the rigid and flexible dynamic [21]
Figure 6 shows the trend of thrust with the fore-bodydeflection The thrust decreases as the fore-body deflectionincreases this is because the bending of vehicle body canresult in not enough airflow flown into the engine which willthen affect the propulsion system
Figure 6 Thrust versus Δ1205911
33 Control-OrientedModel Themodel in Section 2 capturesinteractions among the aerodynamics structural dynamicsand propulsion of the hypersonic vehicle and the strongcouplings between the rigid and flexible modes result inintractable systems for nonlinear control By replacing com-plex force and moment functions with curve fitting approx-imations neglecting certain weak couplings a simplifiedcontrol-orientedmodel can be obtainedThemodel should besimple enough to facilitate controller design and capture theinherent features which are included in physics-basedmodelBy analyzing the couplings from the aerodynamic data of themodel we choose the variables and the functions of forcesand moments which are
119871 asymp 119902119878119862119871(119872119886 120572 120575
119890 120578 120578)
119863 asymp 119902119878119862119863(119872119886 120572 120575
119890 120578 120578)
119879 asymp 119902119878119862119879(119872119886 120572 120601 120575
119890 120578 120578)
119872 asymp 119911119879119879 + 119902119888119878119862
119872(119872119886 120572 120575
119890 120578 120578)
119873119894asymp 119902119878119862
119873119894
(119872119886 120572 120575119890 120578 120578) 119894 = 1 2 3
(29)
where 120578 = (1205781 1205782 1205783) and 120578 = ( 120578
1 1205782 1205783) reflect the unsteady
effects on the aerodynamic forces and momentsBased on the aerodynamic data from the physics-based
model we can get the forces and moments coefficients byusing the curve fitting method
119862119871= 119862119872119886
119871119872119886 + 119862
120572
119871120572 + 119862
120575119890
119871120575119890+ 1198621205781
1198711205781+ 1198621205783
1198711205783+ 1198621205782
1198711205782+ 1198620
119871
119862119863= 119862119872119886
119863119872119886 + 119862
120572
119863120572 + 119862
120575119890
119863120575119890+ 1198621205781
1198631205781
+ 1198621205783
1198631205783+ 119862119872119886120572
119863119872119886 sdot 120572 + 119862
119872119886120575119888
119863119872119886 sdot 120575
119890
+ 119862120572120575119890
119863120572 sdot 120575119890+ 1198621205722
1198631205722+ 1198621205752
119890
1198631205752
119890+ 119862119900
119863
119862119879= 119862119872119886
119879119872119886 + 119862
120572
119879120572 + 119862
120601
119879120601 + 119862
1205723120601
1198791205723120601
+ 1198621205722120601
1198791205722120601 + 119862
120572120601
119879120572 sdot 120601 + 119862
119872119886120601
119879119872119886 sdot 120601
+ 1198621205781
1198791205781+ 1198621205782
1198791205782+ 1198621205783
1198791205783+ 119862119900
119879
Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 1 The range of the variables
Variables Range Variables Range119881 (fts) 7500sim11000 120578
2minus003sim004
120572 (deg) minus5sim5 1205783
minus0003sim0004120575119890(deg) minus10sim10 120578
1minus3sim4
120601 005sim15 1205782
minus03sim041205781
minus03sim04 1205783
minus003sim004
Table 2 The coefficients of fits for the lift
Terms Values Terms Values119862
Ma119871
minus000578253 1198621205783
119871minus00954033
119862120572
119871584425 119862
1205782
119871minus000413381
119862120575119890
1198710755975 119862
0
11987100621356
1198621205781
119871minus00522466
Table 3 The coefficients of fits for the drag
Terms Values Terms Values119862
Ma119863
00201306 119862Ma120575119890119863
minus000383177119862120572
1198630203794 119862
120572120575119890
119863198468
119862120575119890
11986300325529 119862
1205722
119863772588
1198621205781
11986300025028 119862
1205752
119890
1198630945984
1198621205783
119863000496105 119862
0
119863minus0109122
119862Ma120572119863
minus00241477
119862119872= 119862119872119886
119872119872119886 + 119862
120572
119872120572 + 119862
120575119890
119872120575119890
+ 1198621205781
1198721205781+ 1198621205782
1198721205782+ 1198621205783
1198721205783+ 1198620
119872
119862119873119894
= 119862119872119886
119873119894
119872119886 + 119862120572
119873119894
120572 + 119862120575119890
119873119894
120575119890
+ 1198621205781
119873119894
1205781+ 1198621205782
119873119894
1205782+ 1198621205783
119873119894
1205783+ 1198620
119873119894
119894 = 1 2 3
(30)
The forces and moments coefficients are all the functionsof rigid states flexible modes and control inputs where thelift and general force functions contain linear terms withrespect to each variable Throttle term is omitted in thefunction of the lift drag and general force because of littleinfluence on the fitting accuracy Adding the cross-terms andhigher-order terms can increase the fit accuracy in the dragand thrust functions The forces and moment contain steadystates and unsteady flexible effects
The fit functions (30) reduce the complexity of theaerodynamic model in Section 2 and the containing ofthe unsteady flexible effects 120578 in polynomials reflects thecouplings between the flexible structure and aeropropulsionsystemThe ranges of variables in the fit functions are shownin Table 1 and Tables 2 3 4 5 and 6 show the values of thefit coefficients
Table 4 The coefficients of fits for the thrust
Terms Values Terms Values119862
Ma119879
00059 119862Ma120601119879
minus1268976
119862120572
119879minus04255 119862
1205781
1198791323165
119862120601
119879minus07297 119862
1205782
119879minus93163
1198621205723120601
11987900081 119862
1205783
11987901239
1198621205722120601
119879001 119862
0
119879minus00429
119862120572120601
11987900157
Table 5 The coefficients of fits for the pitching moment
Terms Values Terms Values119862
Ma119872
052405 1198621205782
119872minus0116657
119862120572
119872317904 119862
1205783
119872minus00868456
119862120575119890
119872minus251464 119862
0
119872minus0887385
1198621205781
119872minus0325935
Table 6 The coefficients of fits for the generalized forces
Terms Values Terms Values119862
Ma1198731
minus00003 1198621205781
119873200009
119862120572
1198731minus04515 119862
1205782
1198732minus00012
119862120575119890
1198731minus01517 119862
1205783
119873200021
1198621205781
119873100042 119862
0
119873200015
1198621205782
11987310001 119862
Ma1198733
00005
1198621205783
119873100087 119862
120572
1198733minus01365
1198620
1198731minus00027 119862
120575119890
1198733minus00527
119862Ma1198732
minus00006 1198621205781
119873300009
119862120572
1198732minus01236 119862
1205782
119873300003
119862120575119890
1198732minus00869 119862
1205783
11987330002
119862120575119888
1198732minus00926 119862
0
1198733minus00044
119862120575119890
1198732minus00864
To validate the goodness of the fit functions we examinethe three-dimensional plots of the aerodynamic forces andmoments with variables under certain flight conditionsFigures 7 and 8 show the trend of lift and pitching momentwith 120572 120575
119890 and 119872119886 we can see that the trend of the fit
curve and the interpolation surface of the experimental datais approximated The 119875 value is 0 and the coefficient ofdetermination is above 09 in the fitting which shows that thefit functions are very significantThe fitting errors are 006720009 0232 00057 00066 00029 and 00021 respectivelyThen we can conclude that the goodness of the fit is high andthe fittings meet the accuracy requirement
8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
758
859
9510
minus01
minus005
0
005
01minus1
minus05
0
05
1
Mach
Angle of attack (rad)
Coe
ffici
ent o
f lift
Figure 7 Lift versus 120572 and119872119886
Figure 8 Pitching moment versus 120572 and 120575119890
4 Dynamic Analysis
For the analysis of the dynamic stability the vehicle istrimmed in steady level flight at an altitude of 85000 ft andMach 8 then the vehicle model is linearized at the trimcondition in Table 7The pole-zeromap is shown in Figure 9where the input is the elevator deflection 120575
119890and the output is
the velocity 119881 We can see that the vehicle has an unstableshort period mode an unstable long period mode and threestable flexible modesThe flexible modes are pairs of complexconjugate poles and have negative real parts The RHP zeroin Figure 9 shows that the vehicle model is unstable and thenonminimum phase phenomenon exists
5 Conclusions
Based on the longitudinal geometry of an air-breathinghypersonic vehicle this work uses the engineering estimatedmethod to calculate the aerodynamics steady forces andmoments viscous effects and unsteady flexible effects Aphysics-based vehicle model which contains aeroflexiblestructure-propulsion interactions is developed With the
minus15 minus10 minus5 0 5 10 15minus100
minus50
0
50
100Pole-zero map
Real axis (sminus1)
Imag
inar
y ax
is (s
minus1)
Figure 9 The pole-zero map
Table 7 Trim at Mach 885000 ft height for the model
States Value States Value119881 (Ma) 8 120578
3(ftsdotslug) minus00019934
ℎ (ft) 85000 120575119890(∘) 79968
120572 (∘) 05758 120601 0519141205781(ftsdotslug) minus015266 120578
2(ftsdotslug) minus0013716
curve fitting approximation method a simplified control-oriented model is presented where the forces moments andthrust are the polynomial functions of the states and controlinputs The simulations show that the flexible and viscouseffects can change the aerodynamic layout on the vehicleand should not be omitted in vehicle modeling The control-oriented model retains the couplings between the rigid andflexible dynamics and can be applied for controller design
Conflict of Interests
Theauthors declare that there is no commercial or associativeinterest that represents a conflict of interests in connectionwith the work submitted
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China under Grant no 61273092the Foundation for Key Program of Ministry of EducationChina under Grant no 311012 Tianjin Basic ResearchKey Foundation under Grants nos 11JCZDJC2510012JCZDJC30300
References
[1] J J McNamara and P P Friedmann ldquoAeroelastic andaerothermoelastic analysis of hypersonic vehicles currentstatus and future trendsrdquo in Proceedings of the 48thAIAAASMEASCEAHSASC Structures Structural Dynamicsand Materials Conference pp 3814ndash3868 Honolulu HawaiiUSA April 2007
Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[2] F R Chavez and D K Schmidt ldquoAnalytical aeropropul-siveaeroelastic hypersonic-vehicle model with dynamic anal-ysisrdquo Journal of Guidance Control and Dynamics vol 17 no 6pp 1308ndash1319 1994
[3] A Clark M D Mirmirani C Wu S Choi and M KuipersldquoAn aero-propulsion integrated elastic model of a genericairbreathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and Exhibit pp3699ndash3718 Keystone Colo USA August 2006
[4] A Clark C Wu M Mirmirani S Choi and M KuipersldquoDevelopment of an airframe-propulsion integrated generichypersonic vehicle modelrdquo in Proceedings of the 44th AIAAAerospace Sciences Meeting and Exhibit AIAA 2006-218 pp2625ndash2654 Reno Nev USA January 2006
[5] M A Bolender and D B Doman ldquoNonlinear longitudinaldynamical model of an air-breathing hypersonic vehiclerdquo Jour-nal of Spacecraft and Rockets vol 44 no 2 pp 374ndash387 2007
[6] M W Oppenheimer and D B Doman ldquoA hypersonic vehiclemodel developedwith piston theoryrdquo inProceedings of the AIAAAtmospheric Flight Mechanics Conference AIAA-2006-6637 pp1241ndash1260 Keystone Colo USA August 2006
[7] M W Oppenheimer T Skujins M A Bolender and D BDoman ldquoA flexible hypersonic vehicle model developed withpiston theoryrdquo in Proceedings of the AIAA Atmospheric FlightMechanics Conference and Exhibit AIAA 2007-6396 pp 396ndash420 Hilton Head Island SC USA August 2007
[8] J T Parker A Serrani S Yurkovich M A Bolender and D BDoman ldquoControl-orientedmodeling of an air-breathing hyper-sonic vehiclerdquo Journal of Guidance Control and Dynamics vol30 no 3 pp 856ndash869 2007
[9] L Fiorentini A Serrani M A Bolender and D B DomanldquoNonlinear robust adaptive control of flexible air-breathinghypersonic vehiclesrdquo Journal of Guidance Control and Dynam-ics vol 32 no 2 pp 401ndash416 2009
[10] D O Sigthorsson and A Serrani ldquoDevelopment of linearparameter-varying models of hypersonic air-breathing vehi-clesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Chicago Ill USA August 2009
[11] S G V Frendreis T Skujins and C E S Cesnik ldquoSix-degree-of-freedom simulation of hypersonic vehiclesrdquo in Proceedings ofthe AIAAAtmospheric FlightMechanics Conference Chicago IllUSA August 2009
[12] S G V Frendreis and C E S Cesnik ldquo3D simulation of flexiblehypersonic vehiclesrdquo in Proceedings of the AIAA AtmosphericFlight Mechanics Conference Toronto Canada August 2010
[13] J T Parker A Serrani S Yurkovich M A Bolender andD B Doman ldquoApproximate feedback linearization of an air-breathing hypersonic vehiclerdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA 2006-6556 Keystone Colo USA 2006
[14] H Li Y Si L Wu X Hu and H Gao ldquoMulti-objectivefault-tolerant output tracking control of a flexible air-breathinghypersonic vehiclerdquo Proceedings of the Institution of MechanicalEngineers I Journal of Systems and Control Engineering vol 224no 6 pp 647ndash667 2010
[15] H Li Y Si L Wu X Hu and H Gao ldquoGuaranteed cost controlwith poles assignment for a flexible air-breathing hypersonicvehiclerdquo International Journal of Systems Science vol 42 no 5pp 863ndash876 2011
[16] H Li L Wu H Gao X Hu and Y Si ldquoReference output track-ing control for a flexible air-breathing hypersonic vehicle via
output feedbackrdquo Optimal Control Applications and Methodsvol 33 no 4 pp 461ndash487 2012
[17] Q Zong J Wang and Y Tao ldquoAdaptive high-order dynamicsliding mode control for a flexible air-breathing hypersonicvehiclerdquo International Journal of Robust and Nonlinear Controlvol 23 no 15 pp 1718ndash1736 2013
[18] T Williams M A Bolender D B Doman and O MoratayaldquoAn aerothermal flexible mode analysis of a hypersonic vehiclerdquoin Proceedings of the AIAA Atmospheric Flight Mechanics Con-ference and Exhibit pp 1391ndash1412 Keystone Colo USA August2006
[19] M W Oppenheimer D B Doman J J McNamara and A JCuller ldquoViscous effects for a hypersonic vehicle modelrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit AIAA 2008-6382 Honolulu Hawaii USA August2008
[20] F Poulain andOChatillon ldquoNonlinear control of a airbreathinghypersonic vehiclerdquo inProceedings of the 16thAIAADLRDGLRInternational Space Planes and Hypersonic Systems and Tech-nologies Conference Bremen Germany October 2009
[21] J Levin P A Ioannou and M D Mirmirani ldquoAdaptive modesuppression scheme for an aeroelastic airbreathing hypersoniccruise vehiclerdquo in Proceedings of the AIAAGuidance Navigationand Control Conference and Exhibit Honolulu Hawaii USAAugust 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of