Embed Size (px)
Citation preview

Research ArticleLow-Complexity Spatial-Temporal FilteringMethod via Compressive Sensing for InterferenceMitigation in a GNSS Receiver
Chung-Liang Chang1 and Guo-Shing Huang2
1 Department of Biomechatronics Engineering National Pingtung University of Science and Technology No 1 Shuefu RoadNeipu Pingtung County 91201 Taiwan
2Department of Electronic Engineering National Chin-Yi University of Technology No 57 Sec 2 Zhongshan RoadTaiping District Taichung 41170 Taiwan
Correspondence should be addressed to Chung-Liang Chang chungliangmailnpustedutw
Received 17 February 2014 Revised 17 April 2014 Accepted 22 April 2014 Published 28 May 2014
Academic Editor Hon Tat Hui
Copyright copy 2014 C-L Chang and G-S HuangThis is an open access article distributed under theCreativeCommonsAttributionLicense which permits unrestricted use distribution and reproduction in anymedium provided the originalwork is properly cited
A compressive sensing based array processing method is proposed to lower the complexity and computation load of arraysystem and to maintain the robust antijam performance in global navigation satellite system (GNSS) receiver Firstly the spatialand temporal compressed matrices are multiplied with array signal which results in a small size array system Secondly the 2-dimensional (2D) minimum variance distortionless response (MVDR) beamformer is employed in proposed system to mitigatethe narrowband and wideband interference simultaneouslyThe iterative process is performed to find optimal spatial and temporalgain vector by MVDR approach which enhances the steering gain of direction of arrival (DOA) of interest Meanwhile the nullgain is set at DOA of interference Finally the simulated navigation signal is generated offline by the graphic user interface tool andemployed in the proposed algorithmThe theoretical analysis results using the proposed algorithm are verified based on simulatedresults
1 Introduction
The global navigation satellite system (GNSS) has beenwidely used in military satellite attitude control missionand civilian applications such as vehicle positioning andmobile navigation The user can utilize a GNSS receiver toknow the current location including longitude latitude andtime At present two bands L1 and L2 are employed inglobal positioning system (GPS) to meet the high-precisionpositioning demands such as during military operationsHowever most of low cost GNSS receivers are equipped withonly single frequency (L1) band which results in low antijamcapabilityThe accuracy and precision of user location can beaffected by unintentional or intentional interferences Thusthe antijam module needs to be embedded in the receiverto maintain positioning performance The antenna array andpre- or postprocessing techniques are common methods tomitigate or cancel interferences Among them only antenna
array technique can obtain the best antijam performance(about 30 to 50 dB) However the pre- or postprocessingtechniques are widely used in current interior GNSS receiverdesign because of low cost and complexity The spatial-temporal adaptive processing (STAP) techniques have beenproposed to perform 2D filtering on radar or navigationsignals tomitigate narrowbandwideband (NBWB) interfer-ences multipath and other uncertainties [1ndash7] Neverthelessit is necessary to increase the number of antennas and timedelay elements to obtain better antijam performance forantenna array processing [8] Thus the major challengesfor a perfect GNSS receiver design include reducing theweight complexity and computation time in antenna arrayprocessing to maintain good acquisition performance andinterference resistance
In 2008 Candes and Wakin proposed a compres-sive sensing approach for acquiring the sparse signal andreconstruction from the compressed measurements [9]
Hindawi Publishing CorporationInternational Journal of Antennas and PropagationVolume 2014 Article ID 501025 8 pageshttpdxdoiorg1011552014501025
2 International Journal of Antennas and Propagation
This technique includes three components the sparse trans-form of the signal including ordered discrete Hadamardtransform (DHT) and discrete cosine transform (DCT)the sparse signal with linearnonlinear measurement andsignal reconstruction such as robust uncertainty principles[10] orthogonal matching pursuit method [11] and iterativethresholding [12] This technique has been widely used inbiomedicine radar wireless communication and other fieldapplications [13ndash15] The compressive sensing (CS) basedapproach has been applied to array processing to estimateDoppler-direction-of-arrival (DDOA) for beamforming byusing less number of array antennas and less number ofsamplessnapshots for each antenna [16 17] In this paper theCS based spatial-temporal array processing with minimumvariance distortionless response (MVDR) is proposed tomitigate the narrowbandwideband interferences The timedelay elements different from the previous research [18] areadded into each antenna allowing us to effectively mitigateinterference through STAP compressed measurement usinga MVDR beamformer
2 Methodology
21 Signal Model Assume that 119897th navigation satellite signal119911119897 is received from the antenna frontend at 119896th (119896 =
1 2 119870) time instant which can be represented as follows
119903 (119896) =
119871
sum
119897=1
radic120588119897119863119897 (119896) 119862119897 (119896 minus 120591119897) exp (1198952120587 (119891119897119865119904) 119896 + 120593119897)⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟119911119897
+ V (119896)
(1)
where 119871 depicts the number of light of sight (LOS) navigationsatellite signal in the sky 120588119897 is signal power 119863119897 and 119862119897 depictthe navigation message bit and pseudo random noise (PRN)code of 119897th satellite with time delay 120591119897 119891119897 represents analogintermediate frequency (IF) and V(119896) is interference termwhich consists of WBNB interferences and Gaussian noise119865119904 = 119870119879 denotes the Nyquist sampling rate (Hz) which isequal to119870119879 where 119879 and119870 denote a short observation andthe data length of signal reception respectively
As for array processing the aggregate signal 119909119899 receivedat 119899th input of array system of 119873 antenna elements is givenby
x (119896) = [1199091 1199092 sdot sdot sdot 119909119899 sdot sdot sdot 119909119873]119867
=
119871
sum
119897=1
a119897 (120579119897 120601119897) 119911119897 (119896) + v1015840 (119896) (2)
where 119909119899 denotes the incoming signals on 119899th antennaelement and v1015840 is an additional interference term of 119873-dimension a119897 denotes the array response vector with respectto 119899th navigation signal source at elevation 120579119897 and azimuth 120601119897Assume that the basic matrixΨ120579120601 is determined in the angledomain of size119873 times119872
2
120572(1198722
120572≫ 119873) as
Ψ120579120601 = [a11 (1205791 1206011) a12 (1205791 1206012) sdot sdot sdot a1119872120572 (1205791 120601119872120572) a21 (1205792 1206011) a22 (1205792 1206012) sdot sdot sdot a119872120572119872120572 (120579119872120572 120601119872120572)] (3)
where
a119906V (120579119906 120601V)
=[1 1198861 (120579119906 120601V) 1198862 (120579119906 120601V) sdot sdot sdot 119886119873minus1 (120579119906 120601V)]
119879
radic119873
(4)
and 119872120572 represents the number of azimuth and elevationsearch grid and a119906V(120579119906 120601V) illustrates the steering vectorfrom the direction of arrival at azimuth 120601V and elevation 120579119906Meanwhile the basic matrix Ψ119891 in the frequency domain ofsize 119870 times119872120573 (119872120573 ≫ 119870) is defined as
Ψ119891 = [1 f1 f2 sdot sdot sdot f119872120573]
f119898 =[1 119890
1198952120587(119891119898119865119904) 1198901198954120587(119891119898119865119904) sdot sdot sdot 119890
1198952120587(119891119898119865119904)(119870minus1)]119879
radic119870
(5)
where119872120573 is frequency search grid and f119898 denotes the Fourierbasis vector for 119891119898 Combining (3) and (4) (1) can be
rewritten as matrix X with a size of 119873 times 119870 and 119909(119899 119896) as itscoefficient on the 119899th row and the 119896th column
X = Ψ120579120601UΨ119879
119891 (6)
where U is a 1198722
120572times 119872120573 sparse matrix including 119869 nonzeros
coefficients Assume that the DOA of 119897th signal at (120579119897 120601119897) andDoppler frequency 119891119897 are aligned on the search grids (if 119872120572
and119872120573 are large enough) indexed by 119901119897 and119898119897 respectivelyand U(119901119897 119898119897) = radic120588119897119863119897119862119897
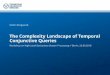
22 Compressive Spatial-Temporal Array Processing Figure 1depicts the proposed CS based array system architectureFirstly the spatial compressed matrixΦ119901 with a size of 119875times119873
(119875 lt 119873) is determined to reduce the original dimension119873 ofspatial array matrix to a lower dimension 119875 of array matrixThen 119875 channel analog data is converted to digital samplesinstead of original 119873 channel data Subsequently the analogto digital converter (ADC) with a Nyquist sampling rate ischanged into an analog to information (A2I) converter witha sub-Nyquist sampling rate by a switch The original signal
International Journal of Antennas and Propagation 3
middot middot middot
middot middot middot
middot middot middot
middot middot middot
middot middot middot
+
+
+
+
+
+
+
+
+
times
times
times
times
times
times
times
times
x1(k)
x1(k)
x2(k)
x2(k)
xN(k)
xN(k)
y1(k)
y2(k)
yp(k)
Φp(1 1)
Φp(1 2)
Φp(1 N)
Φp(P 1)
Φp(P 2)
Φp(PN)
A2I converterΦq
A2I converterΦq
A2I converterΦq
wp1
wp2
wpP P
N
wq
b120579120601bf
(QE)Fs
B minus 1B1 2 3
2D-MVDR
Sub-Nyquist sampling rate
1
2 1
2
⋱
⋰
Figure 1 Block diagram of CS based spatial-temporal array system
samples 119870 of temporal domain are divided into 119861 = 119870119864
block due to A2I converter to carry out the block-wisecompression The temporal compression matrix Φ119902 of size119876times119864 (119876 lt 119864) is defined and indicated as a sampling processin A2I converter with119876119864 ratio of Nyquist sampling rateTheA2I converter performs subsampling process that transformsthe 119864 samples per block to 119876 samples it results in total1198701015840= 119861119876 samples for outputThe independent and identically
distributed (iid) coefficients in spatial-temporal compres-sion matrices (Φ119901 and Φ119902) are assumed to be randomlydistributed (eg Bernoulli Gaussian etc) which satisfiesrestricted isometry property (RIP) with high probability [19]During the hardware implementation process the onoffselection switch or a phase shifterattenuator can be used toimplement the multiplication with coefficients from spatialcompressive matrix Φ119901 The mixer and integrators can be
used to be implemented in multiplication with coefficientsfrom Φ119902 due to the fact that A2I converter operates on theanalog signal after ADC The A2I converter then outputsthe digital signal The smaller 119875 and 119876 are the lower theimplementation complexity of A2I converter is To simplifythe notation the digital baseband version is employed in allequations Assume that the array signal at 119896th index in (6) isrewritten as
X = [X1 X2 sdot sdot sdot X119894 sdot sdot sdot X119861]119873times119870 (7)
where 119894 = 1 2 119887 119861 denotes the block index andthe length of each block is 119864 which is equal to 1119861 coarseacquisition (CA) code periodX119894 is the uncompressed signalof size119873 times 119864
X119894 = [x (((119887 minus 1) 119864 + 1) 119879119904) x (((119887 minus 1) 119864 + 2) 119879119904) sdot sdot sdot x (((119887 minus 1) 119864 + 119864) 119879119904)]119873times119864 (8)
4 International Journal of Antennas and Propagation
After the compressed spatial-temporal process (7) and (8)become
Z = [Z1 Z2 sdot sdot sdot Z119861]119875times1198701015840 (9)
Z119894 = [Φ119901X119894Φ119867
119902]119875times119876
(10)
whereZ119894 indicate the 119894th compressive spatial-temporalmatrixwith a size of 119875 times 119876 Then (9) can be rewritten as
Z = Φ119886X(IB otimesΦ119887)119879= Ψ120579120601UΨ
119879
119891 (11)
where Ψ120579120601 and Ψ119891 denote compressed angle and frequencybasis matrix respectively
Consider
Ψ120579120601 = Φ119886Ψ120579120601
Ψ119891 = (IB otimesΦ119887)Ψ119891
(12)
Assume frequency basis matrix Ψ119891 is divided into 119861 subma-trices each with 119876 rows Then the matrix Ψ119891119894 depicts 119894thsubmatrix ofΨ119891 Equation (10) can be rewritten as
Z119894 = Ψ120579120601UΨ119879
119891119894 (13)
23 2-Dimensional MVDR Beamformer Assume that theDOA of a desired signal and Doppler frequency are knowna priori The optimum MVDR beamformers w119901 and w119902 canbe found by employing iterative procedures Thus spatialgain vector w119901 can be found by solving the constrainedminimization problem
argminw119901w119867
119901Rw119901
subject to w119867
119901b120579120601 = 1
(14)
where b120579120601119875times1 = [1 1198861 sdot sdot sdot 119886119887 sdot sdot sdot 119886119875minus1]119879 depicts the null
steering vector with the coefficient 119886119887 R119875times119875 = ZZ119867119861 andZ119875times119861 = Z119875times119861119876(I119861 otimeswlowast
119902119876times1) with a size of 119875times119861 The Lagrange
multiplier method [20] is utilized to solve minimizationproblem in (14) and the solution of MVDR beamformer is asfollows
w119901 =Rminus1b120579120601
b119867120579120601Rminus1b120579120601
(15)
In addition the temporal gain vectorw119902 can also be found viaconstraint minimization problem
argminw119902w119867
119902R1015840w119902
subject to w119867
119902b119891 (1205960) = 1
b119891119876times1 (1205960) = [1 119890minus1198951205960 sdot sdot sdot 119890
minus119895(119876minus1)1205960]119879
(16)
where 1205960 is angular frequency of special interest [sdot]119879 denotes
transposition without conjugation and R1015840119876times119876
= Z1015840 Z1015840119867
119861Z1015840 = [Z119867
1Z1198672
sdot sdot sdot Z119867119861]119876times119861119875
and Z1015840119876times119861
= Z1015840119876times119861119875
(I119861otimes wlowast
119901119875times1)
with a size of 119876 times 119861 Meanwhile the method of Lagrangemultiplier is employed to solve minimization problem in(16) and the solution is explicitly given by the MVDRbeamformer
w119902 =R1015840minus1b119891
b119867119891R1015840minus1b119891
(17)
The gain vector w119901 is a beamformer for (120579119897 120601119897) and w119902 is acertain DDOA for beamforming
The spatial correlationmatrixR is calculated to obtain thenew gain vectorw119901Therefore thew119902 is utilized as a bandpassfilter centered at frequency119891119898 to acquire the filtered signal ZThe temporal correlation matrix R1015840 is calculated to find thenew gain vector w119902 Consequently to compute the temporalgain vector w119901 is used as spatial filter steered to (120579119897 120601119897) toobtain the beamformed signal Z1015840 The MVDR method isutilized to solvew119901 andw119902 which looks for a spatial-temporalfilter to reject the great amount of out-of-band power whilepassing component at angle (120579119897 120601119897) or frequency 119891119898 withno distortion In the following assume that the compressedspatial-temporal gain vector w119875119876times1 is equal to w119902 otimes w119901 thetotal output power of the system is w119867
Λw where Λ119875119876times119875119876 =
RotimesR1015840 and the corresponding optimal signal to interference-plus-noise ratio (SINR) is given by
SINRopt = 1205902
119889b119867Λminus1b (18)
where b119875119876times1 = b119891 otimes b120579120601 denotes 119875119876-dimensional com-pressed spatial-temporal steering vector of the special interestand 1205902
119889is signal power of interestTheminimum sum of error
square is as follows
1205852
min = 1 minus w119867Λw (19)
24 Performance Comparison This section explores the dif-ference between proposed method and other traditionalSTAP algorithms in terms of system complexity and com-putation efficiency The advantage of proposed compressionmethod is that it can reduce the computation time duringmatrix multiplication of STAP algorithms and also thelogic gate count The performance difference of reduced-rank power minimization (PM) [21] MSNWF [22] MVDR[23] and compressive MVDR (C-MVDR) of beamformingalgorithm with regard to convergence rate steady state errornumerical stability and system complexity is demonstratedand compared in Table 1 It can also be concluded thatarray signal after the compression process passing throughMVDR beamformer can yield better beam patternThe errorconvergence rate of proposed method is superior to thatwithout compression Also C-MVDR and MSNWF both arelower in steady state error in contrast toMVDR and reduced-rank PM without compression The system complexity ofproposedmethod is lower than that of othermethods Table 2
International Journal of Antennas and Propagation 5
Table 1 Performance comparison of different beamforming algorithms
Performance criteria AlgorithmReduced-rank PM MSNWF MVDR C-MVDR
Converge rate Fast Fast Medium FastSteady state error Large Small Medium SmallNumerical stability Unstable (CS PC principle) Stable Stable Stable (satisfy RIP condition)System complexity Medium Medium (depend on 119869) High Low (depend on 119875 and 119876)
Table 2 Complexity comparison of STAP algorithms in different update procedures
Algorithm Evaluationfactors
IntermediateCon-strained matrix Update weight vector Total complexity Computation load
(per snapshot)
Reduced-rank PMMUX 119873119864119869 + 119869
2+ 119869 119873119864119869
2+ 119873119864119869 + 119869 119873119864119869
2+ 2119873119864119869 + 119869
2+ 2119869
119874 [119873119864119869]ADD 3119873119864119869 minus 2119873119864 + 1198692minus 1 3119873119864119869 minus 119873119864 minus 119869 minus 1 6119873119864119869 minus 3119873119864 + 119869
2minus 119869 minus 2
MEM 2119873119864 2119873119864 + 119873119864119869 + 119869 119873119864119869 + 4119873119864 + 119869
MSNWFMUX 119873119864119869 + 119869 119873119864119869 + 2119869 2119873119864119869 + 3119869
119874 [119873119864119869]ADD 119873119864119869 119873119864119869 + 2119869 2119873119864119869 + 2119869
MEM 119873119864 119873119864 + 2 2119873119864 + 2
MVDRMUX 3119873119864 3(119873119864)
3+ (119873119864)
23(119873119864)
3+ (119873119864)
2+ 3119873119864
119874 [(119873119864)3]ADD 2(119873119864)
2minus 2119873119864 3(119873119864)
3minus 2(119873119864)
2minus 119873119864 3(119873119864)
3minus 3119873119864
MEM (119873119864)2+ 119864
2119873119864 (119873119864)
2+ 119864
2+ 119873119864
C-MVDRMUX 3119875119876 3(119875119876)
3+ (119875119876)
23(119875119876)
3+ (119875119876)
2+ 3119875119876
119874 [(119875119876)3]ADD 2(119875119876)
2minus 2119875119876 3(119875119876)
3minus 2(119875119876)
2minus 119875119876 3(119875119876)
3minus 3119875119876
MEM (119875119876)2+ 119876
2119875119876 (119875119876)
2+ 119876
2+ 119875119876
WBI
NBI
23249
15
1314
29
12
3
11
1
2
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
260∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
(a)
0
NBI
23249
15
1314
29
12
3
11
1
2
WBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0∘
0∘90∘
60∘
60∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
30∘
(b)
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘13
15
14
29
2623
12
24 9
31
11
2
WBI
NBI
(c)
13
15
14
29
23
12
249
31
11
2
WBI
NBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
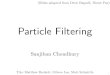
(d)Figure 2 The gain patterns with and without compression measurement (1198701015840
= 3600 119876 = 17 and 119861 = 200) (a) without compressionmeasurement (4 antennas) (b) with compression measurement (4 antennas) (c) without compression measurement (9 antennas) (d) withcompression measurement (9 antennas)
6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
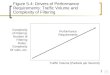
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Antennas and Propagation
This technique includes three components the sparse trans-form of the signal including ordered discrete Hadamardtransform (DHT) and discrete cosine transform (DCT)the sparse signal with linearnonlinear measurement andsignal reconstruction such as robust uncertainty principles[10] orthogonal matching pursuit method [11] and iterativethresholding [12] This technique has been widely used inbiomedicine radar wireless communication and other fieldapplications [13ndash15] The compressive sensing (CS) basedapproach has been applied to array processing to estimateDoppler-direction-of-arrival (DDOA) for beamforming byusing less number of array antennas and less number ofsamplessnapshots for each antenna [16 17] In this paper theCS based spatial-temporal array processing with minimumvariance distortionless response (MVDR) is proposed tomitigate the narrowbandwideband interferences The timedelay elements different from the previous research [18] areadded into each antenna allowing us to effectively mitigateinterference through STAP compressed measurement usinga MVDR beamformer
2 Methodology
21 Signal Model Assume that 119897th navigation satellite signal119911119897 is received from the antenna frontend at 119896th (119896 =
1 2 119870) time instant which can be represented as follows
119903 (119896) =
119871
sum
119897=1
radic120588119897119863119897 (119896) 119862119897 (119896 minus 120591119897) exp (1198952120587 (119891119897119865119904) 119896 + 120593119897)⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟119911119897
+ V (119896)
(1)
where 119871 depicts the number of light of sight (LOS) navigationsatellite signal in the sky 120588119897 is signal power 119863119897 and 119862119897 depictthe navigation message bit and pseudo random noise (PRN)code of 119897th satellite with time delay 120591119897 119891119897 represents analogintermediate frequency (IF) and V(119896) is interference termwhich consists of WBNB interferences and Gaussian noise119865119904 = 119870119879 denotes the Nyquist sampling rate (Hz) which isequal to119870119879 where 119879 and119870 denote a short observation andthe data length of signal reception respectively
As for array processing the aggregate signal 119909119899 receivedat 119899th input of array system of 119873 antenna elements is givenby
x (119896) = [1199091 1199092 sdot sdot sdot 119909119899 sdot sdot sdot 119909119873]119867
=
119871
sum
119897=1
a119897 (120579119897 120601119897) 119911119897 (119896) + v1015840 (119896) (2)
where 119909119899 denotes the incoming signals on 119899th antennaelement and v1015840 is an additional interference term of 119873-dimension a119897 denotes the array response vector with respectto 119899th navigation signal source at elevation 120579119897 and azimuth 120601119897Assume that the basic matrixΨ120579120601 is determined in the angledomain of size119873 times119872
2
120572(1198722
120572≫ 119873) as
Ψ120579120601 = [a11 (1205791 1206011) a12 (1205791 1206012) sdot sdot sdot a1119872120572 (1205791 120601119872120572) a21 (1205792 1206011) a22 (1205792 1206012) sdot sdot sdot a119872120572119872120572 (120579119872120572 120601119872120572)] (3)
where
a119906V (120579119906 120601V)
=[1 1198861 (120579119906 120601V) 1198862 (120579119906 120601V) sdot sdot sdot 119886119873minus1 (120579119906 120601V)]
119879
radic119873
(4)
and 119872120572 represents the number of azimuth and elevationsearch grid and a119906V(120579119906 120601V) illustrates the steering vectorfrom the direction of arrival at azimuth 120601V and elevation 120579119906Meanwhile the basic matrix Ψ119891 in the frequency domain ofsize 119870 times119872120573 (119872120573 ≫ 119870) is defined as
Ψ119891 = [1 f1 f2 sdot sdot sdot f119872120573]
f119898 =[1 119890
1198952120587(119891119898119865119904) 1198901198954120587(119891119898119865119904) sdot sdot sdot 119890
1198952120587(119891119898119865119904)(119870minus1)]119879
radic119870
(5)
where119872120573 is frequency search grid and f119898 denotes the Fourierbasis vector for 119891119898 Combining (3) and (4) (1) can be
rewritten as matrix X with a size of 119873 times 119870 and 119909(119899 119896) as itscoefficient on the 119899th row and the 119896th column
X = Ψ120579120601UΨ119879
119891 (6)
where U is a 1198722
120572times 119872120573 sparse matrix including 119869 nonzeros
coefficients Assume that the DOA of 119897th signal at (120579119897 120601119897) andDoppler frequency 119891119897 are aligned on the search grids (if 119872120572
and119872120573 are large enough) indexed by 119901119897 and119898119897 respectivelyand U(119901119897 119898119897) = radic120588119897119863119897119862119897
22 Compressive Spatial-Temporal Array Processing Figure 1depicts the proposed CS based array system architectureFirstly the spatial compressed matrixΦ119901 with a size of 119875times119873
(119875 lt 119873) is determined to reduce the original dimension119873 ofspatial array matrix to a lower dimension 119875 of array matrixThen 119875 channel analog data is converted to digital samplesinstead of original 119873 channel data Subsequently the analogto digital converter (ADC) with a Nyquist sampling rate ischanged into an analog to information (A2I) converter witha sub-Nyquist sampling rate by a switch The original signal
International Journal of Antennas and Propagation 3
middot middot middot
middot middot middot
middot middot middot
middot middot middot
middot middot middot
+
+
+
+
+
+
+
+
+
times
times
times
times
times
times
times
times
x1(k)
x1(k)
x2(k)
x2(k)
xN(k)
xN(k)
y1(k)
y2(k)
yp(k)
Φp(1 1)
Φp(1 2)
Φp(1 N)
Φp(P 1)
Φp(P 2)
Φp(PN)
A2I converterΦq
A2I converterΦq
A2I converterΦq
wp1
wp2
wpP P
N
wq
b120579120601bf
(QE)Fs
B minus 1B1 2 3
2D-MVDR
Sub-Nyquist sampling rate
1
2 1
2
⋱
⋰
Figure 1 Block diagram of CS based spatial-temporal array system
samples 119870 of temporal domain are divided into 119861 = 119870119864
block due to A2I converter to carry out the block-wisecompression The temporal compression matrix Φ119902 of size119876times119864 (119876 lt 119864) is defined and indicated as a sampling processin A2I converter with119876119864 ratio of Nyquist sampling rateTheA2I converter performs subsampling process that transformsthe 119864 samples per block to 119876 samples it results in total1198701015840= 119861119876 samples for outputThe independent and identically
distributed (iid) coefficients in spatial-temporal compres-sion matrices (Φ119901 and Φ119902) are assumed to be randomlydistributed (eg Bernoulli Gaussian etc) which satisfiesrestricted isometry property (RIP) with high probability [19]During the hardware implementation process the onoffselection switch or a phase shifterattenuator can be used toimplement the multiplication with coefficients from spatialcompressive matrix Φ119901 The mixer and integrators can be
used to be implemented in multiplication with coefficientsfrom Φ119902 due to the fact that A2I converter operates on theanalog signal after ADC The A2I converter then outputsthe digital signal The smaller 119875 and 119876 are the lower theimplementation complexity of A2I converter is To simplifythe notation the digital baseband version is employed in allequations Assume that the array signal at 119896th index in (6) isrewritten as
X = [X1 X2 sdot sdot sdot X119894 sdot sdot sdot X119861]119873times119870 (7)
where 119894 = 1 2 119887 119861 denotes the block index andthe length of each block is 119864 which is equal to 1119861 coarseacquisition (CA) code periodX119894 is the uncompressed signalof size119873 times 119864
X119894 = [x (((119887 minus 1) 119864 + 1) 119879119904) x (((119887 minus 1) 119864 + 2) 119879119904) sdot sdot sdot x (((119887 minus 1) 119864 + 119864) 119879119904)]119873times119864 (8)
4 International Journal of Antennas and Propagation
After the compressed spatial-temporal process (7) and (8)become
Z = [Z1 Z2 sdot sdot sdot Z119861]119875times1198701015840 (9)
Z119894 = [Φ119901X119894Φ119867
119902]119875times119876
(10)
whereZ119894 indicate the 119894th compressive spatial-temporalmatrixwith a size of 119875 times 119876 Then (9) can be rewritten as
Z = Φ119886X(IB otimesΦ119887)119879= Ψ120579120601UΨ
119879
119891 (11)
where Ψ120579120601 and Ψ119891 denote compressed angle and frequencybasis matrix respectively
Consider
Ψ120579120601 = Φ119886Ψ120579120601
Ψ119891 = (IB otimesΦ119887)Ψ119891
(12)
Assume frequency basis matrix Ψ119891 is divided into 119861 subma-trices each with 119876 rows Then the matrix Ψ119891119894 depicts 119894thsubmatrix ofΨ119891 Equation (10) can be rewritten as
Z119894 = Ψ120579120601UΨ119879
119891119894 (13)
23 2-Dimensional MVDR Beamformer Assume that theDOA of a desired signal and Doppler frequency are knowna priori The optimum MVDR beamformers w119901 and w119902 canbe found by employing iterative procedures Thus spatialgain vector w119901 can be found by solving the constrainedminimization problem
argminw119901w119867
119901Rw119901
subject to w119867
119901b120579120601 = 1
(14)
where b120579120601119875times1 = [1 1198861 sdot sdot sdot 119886119887 sdot sdot sdot 119886119875minus1]119879 depicts the null
steering vector with the coefficient 119886119887 R119875times119875 = ZZ119867119861 andZ119875times119861 = Z119875times119861119876(I119861 otimeswlowast
119902119876times1) with a size of 119875times119861 The Lagrange
multiplier method [20] is utilized to solve minimizationproblem in (14) and the solution of MVDR beamformer is asfollows
w119901 =Rminus1b120579120601
b119867120579120601Rminus1b120579120601
(15)
In addition the temporal gain vectorw119902 can also be found viaconstraint minimization problem
argminw119902w119867
119902R1015840w119902
subject to w119867
119902b119891 (1205960) = 1
b119891119876times1 (1205960) = [1 119890minus1198951205960 sdot sdot sdot 119890
minus119895(119876minus1)1205960]119879
(16)
where 1205960 is angular frequency of special interest [sdot]119879 denotes
transposition without conjugation and R1015840119876times119876
= Z1015840 Z1015840119867
119861Z1015840 = [Z119867
1Z1198672
sdot sdot sdot Z119867119861]119876times119861119875
and Z1015840119876times119861
= Z1015840119876times119861119875
(I119861otimes wlowast
119901119875times1)
with a size of 119876 times 119861 Meanwhile the method of Lagrangemultiplier is employed to solve minimization problem in(16) and the solution is explicitly given by the MVDRbeamformer
w119902 =R1015840minus1b119891
b119867119891R1015840minus1b119891
(17)
The gain vector w119901 is a beamformer for (120579119897 120601119897) and w119902 is acertain DDOA for beamforming
The spatial correlationmatrixR is calculated to obtain thenew gain vectorw119901Therefore thew119902 is utilized as a bandpassfilter centered at frequency119891119898 to acquire the filtered signal ZThe temporal correlation matrix R1015840 is calculated to find thenew gain vector w119902 Consequently to compute the temporalgain vector w119901 is used as spatial filter steered to (120579119897 120601119897) toobtain the beamformed signal Z1015840 The MVDR method isutilized to solvew119901 andw119902 which looks for a spatial-temporalfilter to reject the great amount of out-of-band power whilepassing component at angle (120579119897 120601119897) or frequency 119891119898 withno distortion In the following assume that the compressedspatial-temporal gain vector w119875119876times1 is equal to w119902 otimes w119901 thetotal output power of the system is w119867
Λw where Λ119875119876times119875119876 =
RotimesR1015840 and the corresponding optimal signal to interference-plus-noise ratio (SINR) is given by
SINRopt = 1205902
119889b119867Λminus1b (18)
where b119875119876times1 = b119891 otimes b120579120601 denotes 119875119876-dimensional com-pressed spatial-temporal steering vector of the special interestand 1205902
119889is signal power of interestTheminimum sum of error
square is as follows
1205852
min = 1 minus w119867Λw (19)
24 Performance Comparison This section explores the dif-ference between proposed method and other traditionalSTAP algorithms in terms of system complexity and com-putation efficiency The advantage of proposed compressionmethod is that it can reduce the computation time duringmatrix multiplication of STAP algorithms and also thelogic gate count The performance difference of reduced-rank power minimization (PM) [21] MSNWF [22] MVDR[23] and compressive MVDR (C-MVDR) of beamformingalgorithm with regard to convergence rate steady state errornumerical stability and system complexity is demonstratedand compared in Table 1 It can also be concluded thatarray signal after the compression process passing throughMVDR beamformer can yield better beam patternThe errorconvergence rate of proposed method is superior to thatwithout compression Also C-MVDR and MSNWF both arelower in steady state error in contrast toMVDR and reduced-rank PM without compression The system complexity ofproposedmethod is lower than that of othermethods Table 2
International Journal of Antennas and Propagation 5
Table 1 Performance comparison of different beamforming algorithms
Performance criteria AlgorithmReduced-rank PM MSNWF MVDR C-MVDR
Converge rate Fast Fast Medium FastSteady state error Large Small Medium SmallNumerical stability Unstable (CS PC principle) Stable Stable Stable (satisfy RIP condition)System complexity Medium Medium (depend on 119869) High Low (depend on 119875 and 119876)
Table 2 Complexity comparison of STAP algorithms in different update procedures
Algorithm Evaluationfactors
IntermediateCon-strained matrix Update weight vector Total complexity Computation load
(per snapshot)
Reduced-rank PMMUX 119873119864119869 + 119869
2+ 119869 119873119864119869
2+ 119873119864119869 + 119869 119873119864119869
2+ 2119873119864119869 + 119869
2+ 2119869
119874 [119873119864119869]ADD 3119873119864119869 minus 2119873119864 + 1198692minus 1 3119873119864119869 minus 119873119864 minus 119869 minus 1 6119873119864119869 minus 3119873119864 + 119869
2minus 119869 minus 2
MEM 2119873119864 2119873119864 + 119873119864119869 + 119869 119873119864119869 + 4119873119864 + 119869
MSNWFMUX 119873119864119869 + 119869 119873119864119869 + 2119869 2119873119864119869 + 3119869
119874 [119873119864119869]ADD 119873119864119869 119873119864119869 + 2119869 2119873119864119869 + 2119869
MEM 119873119864 119873119864 + 2 2119873119864 + 2
MVDRMUX 3119873119864 3(119873119864)
3+ (119873119864)
23(119873119864)
3+ (119873119864)
2+ 3119873119864
119874 [(119873119864)3]ADD 2(119873119864)
2minus 2119873119864 3(119873119864)
3minus 2(119873119864)
2minus 119873119864 3(119873119864)
3minus 3119873119864
MEM (119873119864)2+ 119864
2119873119864 (119873119864)
2+ 119864
2+ 119873119864
C-MVDRMUX 3119875119876 3(119875119876)
3+ (119875119876)
23(119875119876)
3+ (119875119876)
2+ 3119875119876
119874 [(119875119876)3]ADD 2(119875119876)
2minus 2119875119876 3(119875119876)
3minus 2(119875119876)
2minus 119875119876 3(119875119876)
3minus 3119875119876
MEM (119875119876)2+ 119876
2119875119876 (119875119876)
2+ 119876
2+ 119875119876
WBI
NBI
23249
15
1314
29
12
3
11
1
2
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
260∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
(a)
0
NBI
23249
15
1314
29
12
3
11
1
2
WBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0∘
0∘90∘
60∘
60∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
30∘
(b)
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘13
15
14
29
2623
12
24 9
31
11
2
WBI
NBI
(c)
13
15
14
29
23
12
249
31
11
2
WBI
NBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
(d)Figure 2 The gain patterns with and without compression measurement (1198701015840
= 3600 119876 = 17 and 119861 = 200) (a) without compressionmeasurement (4 antennas) (b) with compression measurement (4 antennas) (c) without compression measurement (9 antennas) (d) withcompression measurement (9 antennas)
6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 3
middot middot middot
middot middot middot
middot middot middot
middot middot middot
middot middot middot
+
+
+
+
+
+
+
+
+
times
times
times
times
times
times
times
times
x1(k)
x1(k)
x2(k)
x2(k)
xN(k)
xN(k)
y1(k)
y2(k)
yp(k)
Φp(1 1)
Φp(1 2)
Φp(1 N)
Φp(P 1)
Φp(P 2)
Φp(PN)
A2I converterΦq
A2I converterΦq
A2I converterΦq
wp1
wp2
wpP P
N
wq
b120579120601bf
(QE)Fs
B minus 1B1 2 3
2D-MVDR
Sub-Nyquist sampling rate
1
2 1
2
⋱
⋰
Figure 1 Block diagram of CS based spatial-temporal array system
samples 119870 of temporal domain are divided into 119861 = 119870119864
block due to A2I converter to carry out the block-wisecompression The temporal compression matrix Φ119902 of size119876times119864 (119876 lt 119864) is defined and indicated as a sampling processin A2I converter with119876119864 ratio of Nyquist sampling rateTheA2I converter performs subsampling process that transformsthe 119864 samples per block to 119876 samples it results in total1198701015840= 119861119876 samples for outputThe independent and identically
distributed (iid) coefficients in spatial-temporal compres-sion matrices (Φ119901 and Φ119902) are assumed to be randomlydistributed (eg Bernoulli Gaussian etc) which satisfiesrestricted isometry property (RIP) with high probability [19]During the hardware implementation process the onoffselection switch or a phase shifterattenuator can be used toimplement the multiplication with coefficients from spatialcompressive matrix Φ119901 The mixer and integrators can be
used to be implemented in multiplication with coefficientsfrom Φ119902 due to the fact that A2I converter operates on theanalog signal after ADC The A2I converter then outputsthe digital signal The smaller 119875 and 119876 are the lower theimplementation complexity of A2I converter is To simplifythe notation the digital baseband version is employed in allequations Assume that the array signal at 119896th index in (6) isrewritten as
X = [X1 X2 sdot sdot sdot X119894 sdot sdot sdot X119861]119873times119870 (7)
where 119894 = 1 2 119887 119861 denotes the block index andthe length of each block is 119864 which is equal to 1119861 coarseacquisition (CA) code periodX119894 is the uncompressed signalof size119873 times 119864
X119894 = [x (((119887 minus 1) 119864 + 1) 119879119904) x (((119887 minus 1) 119864 + 2) 119879119904) sdot sdot sdot x (((119887 minus 1) 119864 + 119864) 119879119904)]119873times119864 (8)
4 International Journal of Antennas and Propagation
After the compressed spatial-temporal process (7) and (8)become
Z = [Z1 Z2 sdot sdot sdot Z119861]119875times1198701015840 (9)
Z119894 = [Φ119901X119894Φ119867
119902]119875times119876
(10)
whereZ119894 indicate the 119894th compressive spatial-temporalmatrixwith a size of 119875 times 119876 Then (9) can be rewritten as
Z = Φ119886X(IB otimesΦ119887)119879= Ψ120579120601UΨ
119879
119891 (11)
where Ψ120579120601 and Ψ119891 denote compressed angle and frequencybasis matrix respectively
Consider
Ψ120579120601 = Φ119886Ψ120579120601
Ψ119891 = (IB otimesΦ119887)Ψ119891
(12)
Assume frequency basis matrix Ψ119891 is divided into 119861 subma-trices each with 119876 rows Then the matrix Ψ119891119894 depicts 119894thsubmatrix ofΨ119891 Equation (10) can be rewritten as
Z119894 = Ψ120579120601UΨ119879
119891119894 (13)
23 2-Dimensional MVDR Beamformer Assume that theDOA of a desired signal and Doppler frequency are knowna priori The optimum MVDR beamformers w119901 and w119902 canbe found by employing iterative procedures Thus spatialgain vector w119901 can be found by solving the constrainedminimization problem
argminw119901w119867
119901Rw119901
subject to w119867
119901b120579120601 = 1
(14)
where b120579120601119875times1 = [1 1198861 sdot sdot sdot 119886119887 sdot sdot sdot 119886119875minus1]119879 depicts the null
steering vector with the coefficient 119886119887 R119875times119875 = ZZ119867119861 andZ119875times119861 = Z119875times119861119876(I119861 otimeswlowast
119902119876times1) with a size of 119875times119861 The Lagrange
multiplier method [20] is utilized to solve minimizationproblem in (14) and the solution of MVDR beamformer is asfollows
w119901 =Rminus1b120579120601
b119867120579120601Rminus1b120579120601
(15)
In addition the temporal gain vectorw119902 can also be found viaconstraint minimization problem
argminw119902w119867
119902R1015840w119902
subject to w119867
119902b119891 (1205960) = 1
b119891119876times1 (1205960) = [1 119890minus1198951205960 sdot sdot sdot 119890
minus119895(119876minus1)1205960]119879
(16)
where 1205960 is angular frequency of special interest [sdot]119879 denotes
transposition without conjugation and R1015840119876times119876
= Z1015840 Z1015840119867
119861Z1015840 = [Z119867
1Z1198672
sdot sdot sdot Z119867119861]119876times119861119875
and Z1015840119876times119861
= Z1015840119876times119861119875
(I119861otimes wlowast
119901119875times1)
with a size of 119876 times 119861 Meanwhile the method of Lagrangemultiplier is employed to solve minimization problem in(16) and the solution is explicitly given by the MVDRbeamformer
w119902 =R1015840minus1b119891
b119867119891R1015840minus1b119891
(17)
The gain vector w119901 is a beamformer for (120579119897 120601119897) and w119902 is acertain DDOA for beamforming
The spatial correlationmatrixR is calculated to obtain thenew gain vectorw119901Therefore thew119902 is utilized as a bandpassfilter centered at frequency119891119898 to acquire the filtered signal ZThe temporal correlation matrix R1015840 is calculated to find thenew gain vector w119902 Consequently to compute the temporalgain vector w119901 is used as spatial filter steered to (120579119897 120601119897) toobtain the beamformed signal Z1015840 The MVDR method isutilized to solvew119901 andw119902 which looks for a spatial-temporalfilter to reject the great amount of out-of-band power whilepassing component at angle (120579119897 120601119897) or frequency 119891119898 withno distortion In the following assume that the compressedspatial-temporal gain vector w119875119876times1 is equal to w119902 otimes w119901 thetotal output power of the system is w119867
Λw where Λ119875119876times119875119876 =
RotimesR1015840 and the corresponding optimal signal to interference-plus-noise ratio (SINR) is given by
SINRopt = 1205902
119889b119867Λminus1b (18)
where b119875119876times1 = b119891 otimes b120579120601 denotes 119875119876-dimensional com-pressed spatial-temporal steering vector of the special interestand 1205902
119889is signal power of interestTheminimum sum of error
square is as follows
1205852
min = 1 minus w119867Λw (19)
24 Performance Comparison This section explores the dif-ference between proposed method and other traditionalSTAP algorithms in terms of system complexity and com-putation efficiency The advantage of proposed compressionmethod is that it can reduce the computation time duringmatrix multiplication of STAP algorithms and also thelogic gate count The performance difference of reduced-rank power minimization (PM) [21] MSNWF [22] MVDR[23] and compressive MVDR (C-MVDR) of beamformingalgorithm with regard to convergence rate steady state errornumerical stability and system complexity is demonstratedand compared in Table 1 It can also be concluded thatarray signal after the compression process passing throughMVDR beamformer can yield better beam patternThe errorconvergence rate of proposed method is superior to thatwithout compression Also C-MVDR and MSNWF both arelower in steady state error in contrast toMVDR and reduced-rank PM without compression The system complexity ofproposedmethod is lower than that of othermethods Table 2
International Journal of Antennas and Propagation 5
Table 1 Performance comparison of different beamforming algorithms
Performance criteria AlgorithmReduced-rank PM MSNWF MVDR C-MVDR
Converge rate Fast Fast Medium FastSteady state error Large Small Medium SmallNumerical stability Unstable (CS PC principle) Stable Stable Stable (satisfy RIP condition)System complexity Medium Medium (depend on 119869) High Low (depend on 119875 and 119876)
Table 2 Complexity comparison of STAP algorithms in different update procedures
Algorithm Evaluationfactors
IntermediateCon-strained matrix Update weight vector Total complexity Computation load
(per snapshot)
Reduced-rank PMMUX 119873119864119869 + 119869
2+ 119869 119873119864119869
2+ 119873119864119869 + 119869 119873119864119869
2+ 2119873119864119869 + 119869
2+ 2119869
119874 [119873119864119869]ADD 3119873119864119869 minus 2119873119864 + 1198692minus 1 3119873119864119869 minus 119873119864 minus 119869 minus 1 6119873119864119869 minus 3119873119864 + 119869
2minus 119869 minus 2
MEM 2119873119864 2119873119864 + 119873119864119869 + 119869 119873119864119869 + 4119873119864 + 119869
MSNWFMUX 119873119864119869 + 119869 119873119864119869 + 2119869 2119873119864119869 + 3119869
119874 [119873119864119869]ADD 119873119864119869 119873119864119869 + 2119869 2119873119864119869 + 2119869
MEM 119873119864 119873119864 + 2 2119873119864 + 2
MVDRMUX 3119873119864 3(119873119864)
3+ (119873119864)
23(119873119864)
3+ (119873119864)
2+ 3119873119864
119874 [(119873119864)3]ADD 2(119873119864)
2minus 2119873119864 3(119873119864)
3minus 2(119873119864)
2minus 119873119864 3(119873119864)
3minus 3119873119864
MEM (119873119864)2+ 119864
2119873119864 (119873119864)
2+ 119864
2+ 119873119864
C-MVDRMUX 3119875119876 3(119875119876)
3+ (119875119876)
23(119875119876)
3+ (119875119876)
2+ 3119875119876
119874 [(119875119876)3]ADD 2(119875119876)
2minus 2119875119876 3(119875119876)
3minus 2(119875119876)
2minus 119875119876 3(119875119876)
3minus 3119875119876
MEM (119875119876)2+ 119876
2119875119876 (119875119876)
2+ 119876
2+ 119875119876
WBI
NBI
23249
15
1314
29
12
3
11
1
2
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
260∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
(a)
0
NBI
23249
15
1314
29
12
3
11
1
2
WBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0∘
0∘90∘
60∘
60∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
30∘
(b)
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘13
15
14
29
2623
12
24 9
31
11
2
WBI
NBI
(c)
13
15
14
29
23
12
249
31
11
2
WBI
NBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
(d)Figure 2 The gain patterns with and without compression measurement (1198701015840
= 3600 119876 = 17 and 119861 = 200) (a) without compressionmeasurement (4 antennas) (b) with compression measurement (4 antennas) (c) without compression measurement (9 antennas) (d) withcompression measurement (9 antennas)
6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Antennas and Propagation
After the compressed spatial-temporal process (7) and (8)become
Z = [Z1 Z2 sdot sdot sdot Z119861]119875times1198701015840 (9)
Z119894 = [Φ119901X119894Φ119867
119902]119875times119876
(10)
whereZ119894 indicate the 119894th compressive spatial-temporalmatrixwith a size of 119875 times 119876 Then (9) can be rewritten as
Z = Φ119886X(IB otimesΦ119887)119879= Ψ120579120601UΨ
119879
119891 (11)
where Ψ120579120601 and Ψ119891 denote compressed angle and frequencybasis matrix respectively
Consider
Ψ120579120601 = Φ119886Ψ120579120601
Ψ119891 = (IB otimesΦ119887)Ψ119891
(12)
Assume frequency basis matrix Ψ119891 is divided into 119861 subma-trices each with 119876 rows Then the matrix Ψ119891119894 depicts 119894thsubmatrix ofΨ119891 Equation (10) can be rewritten as
Z119894 = Ψ120579120601UΨ119879
119891119894 (13)
23 2-Dimensional MVDR Beamformer Assume that theDOA of a desired signal and Doppler frequency are knowna priori The optimum MVDR beamformers w119901 and w119902 canbe found by employing iterative procedures Thus spatialgain vector w119901 can be found by solving the constrainedminimization problem
argminw119901w119867
119901Rw119901
subject to w119867
119901b120579120601 = 1
(14)
where b120579120601119875times1 = [1 1198861 sdot sdot sdot 119886119887 sdot sdot sdot 119886119875minus1]119879 depicts the null
steering vector with the coefficient 119886119887 R119875times119875 = ZZ119867119861 andZ119875times119861 = Z119875times119861119876(I119861 otimeswlowast
119902119876times1) with a size of 119875times119861 The Lagrange
multiplier method [20] is utilized to solve minimizationproblem in (14) and the solution of MVDR beamformer is asfollows
w119901 =Rminus1b120579120601
b119867120579120601Rminus1b120579120601
(15)
In addition the temporal gain vectorw119902 can also be found viaconstraint minimization problem
argminw119902w119867
119902R1015840w119902
subject to w119867
119902b119891 (1205960) = 1
b119891119876times1 (1205960) = [1 119890minus1198951205960 sdot sdot sdot 119890
minus119895(119876minus1)1205960]119879
(16)
where 1205960 is angular frequency of special interest [sdot]119879 denotes
transposition without conjugation and R1015840119876times119876
= Z1015840 Z1015840119867
119861Z1015840 = [Z119867
1Z1198672
sdot sdot sdot Z119867119861]119876times119861119875
and Z1015840119876times119861
= Z1015840119876times119861119875
(I119861otimes wlowast
119901119875times1)
with a size of 119876 times 119861 Meanwhile the method of Lagrangemultiplier is employed to solve minimization problem in(16) and the solution is explicitly given by the MVDRbeamformer
w119902 =R1015840minus1b119891
b119867119891R1015840minus1b119891
(17)
The gain vector w119901 is a beamformer for (120579119897 120601119897) and w119902 is acertain DDOA for beamforming
The spatial correlationmatrixR is calculated to obtain thenew gain vectorw119901Therefore thew119902 is utilized as a bandpassfilter centered at frequency119891119898 to acquire the filtered signal ZThe temporal correlation matrix R1015840 is calculated to find thenew gain vector w119902 Consequently to compute the temporalgain vector w119901 is used as spatial filter steered to (120579119897 120601119897) toobtain the beamformed signal Z1015840 The MVDR method isutilized to solvew119901 andw119902 which looks for a spatial-temporalfilter to reject the great amount of out-of-band power whilepassing component at angle (120579119897 120601119897) or frequency 119891119898 withno distortion In the following assume that the compressedspatial-temporal gain vector w119875119876times1 is equal to w119902 otimes w119901 thetotal output power of the system is w119867
Λw where Λ119875119876times119875119876 =
RotimesR1015840 and the corresponding optimal signal to interference-plus-noise ratio (SINR) is given by
SINRopt = 1205902
119889b119867Λminus1b (18)
where b119875119876times1 = b119891 otimes b120579120601 denotes 119875119876-dimensional com-pressed spatial-temporal steering vector of the special interestand 1205902
119889is signal power of interestTheminimum sum of error
square is as follows
1205852
min = 1 minus w119867Λw (19)
24 Performance Comparison This section explores the dif-ference between proposed method and other traditionalSTAP algorithms in terms of system complexity and com-putation efficiency The advantage of proposed compressionmethod is that it can reduce the computation time duringmatrix multiplication of STAP algorithms and also thelogic gate count The performance difference of reduced-rank power minimization (PM) [21] MSNWF [22] MVDR[23] and compressive MVDR (C-MVDR) of beamformingalgorithm with regard to convergence rate steady state errornumerical stability and system complexity is demonstratedand compared in Table 1 It can also be concluded thatarray signal after the compression process passing throughMVDR beamformer can yield better beam patternThe errorconvergence rate of proposed method is superior to thatwithout compression Also C-MVDR and MSNWF both arelower in steady state error in contrast toMVDR and reduced-rank PM without compression The system complexity ofproposedmethod is lower than that of othermethods Table 2
International Journal of Antennas and Propagation 5
Table 1 Performance comparison of different beamforming algorithms
Performance criteria AlgorithmReduced-rank PM MSNWF MVDR C-MVDR
Converge rate Fast Fast Medium FastSteady state error Large Small Medium SmallNumerical stability Unstable (CS PC principle) Stable Stable Stable (satisfy RIP condition)System complexity Medium Medium (depend on 119869) High Low (depend on 119875 and 119876)
Table 2 Complexity comparison of STAP algorithms in different update procedures
Algorithm Evaluationfactors
IntermediateCon-strained matrix Update weight vector Total complexity Computation load
(per snapshot)
Reduced-rank PMMUX 119873119864119869 + 119869
2+ 119869 119873119864119869
2+ 119873119864119869 + 119869 119873119864119869
2+ 2119873119864119869 + 119869
2+ 2119869
119874 [119873119864119869]ADD 3119873119864119869 minus 2119873119864 + 1198692minus 1 3119873119864119869 minus 119873119864 minus 119869 minus 1 6119873119864119869 minus 3119873119864 + 119869
2minus 119869 minus 2
MEM 2119873119864 2119873119864 + 119873119864119869 + 119869 119873119864119869 + 4119873119864 + 119869
MSNWFMUX 119873119864119869 + 119869 119873119864119869 + 2119869 2119873119864119869 + 3119869
119874 [119873119864119869]ADD 119873119864119869 119873119864119869 + 2119869 2119873119864119869 + 2119869
MEM 119873119864 119873119864 + 2 2119873119864 + 2
MVDRMUX 3119873119864 3(119873119864)
3+ (119873119864)
23(119873119864)
3+ (119873119864)
2+ 3119873119864
119874 [(119873119864)3]ADD 2(119873119864)
2minus 2119873119864 3(119873119864)
3minus 2(119873119864)
2minus 119873119864 3(119873119864)
3minus 3119873119864
MEM (119873119864)2+ 119864
2119873119864 (119873119864)
2+ 119864
2+ 119873119864
C-MVDRMUX 3119875119876 3(119875119876)
3+ (119875119876)
23(119875119876)
3+ (119875119876)
2+ 3119875119876
119874 [(119875119876)3]ADD 2(119875119876)
2minus 2119875119876 3(119875119876)
3minus 2(119875119876)
2minus 119875119876 3(119875119876)
3minus 3119875119876
MEM (119875119876)2+ 119876
2119875119876 (119875119876)
2+ 119876
2+ 119875119876
WBI
NBI
23249
15
1314
29
12
3
11
1
2
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
260∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
(a)
0
NBI
23249
15
1314
29
12
3
11
1
2
WBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0∘
0∘90∘
60∘
60∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
30∘
(b)
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘13
15
14
29
2623
12
24 9
31
11
2
WBI
NBI
(c)
13
15
14
29
23
12
249
31
11
2
WBI
NBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
(d)Figure 2 The gain patterns with and without compression measurement (1198701015840
= 3600 119876 = 17 and 119861 = 200) (a) without compressionmeasurement (4 antennas) (b) with compression measurement (4 antennas) (c) without compression measurement (9 antennas) (d) withcompression measurement (9 antennas)
6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 5
Table 1 Performance comparison of different beamforming algorithms
Performance criteria AlgorithmReduced-rank PM MSNWF MVDR C-MVDR
Converge rate Fast Fast Medium FastSteady state error Large Small Medium SmallNumerical stability Unstable (CS PC principle) Stable Stable Stable (satisfy RIP condition)System complexity Medium Medium (depend on 119869) High Low (depend on 119875 and 119876)
Table 2 Complexity comparison of STAP algorithms in different update procedures
Algorithm Evaluationfactors
IntermediateCon-strained matrix Update weight vector Total complexity Computation load
(per snapshot)
Reduced-rank PMMUX 119873119864119869 + 119869
2+ 119869 119873119864119869
2+ 119873119864119869 + 119869 119873119864119869
2+ 2119873119864119869 + 119869
2+ 2119869
119874 [119873119864119869]ADD 3119873119864119869 minus 2119873119864 + 1198692minus 1 3119873119864119869 minus 119873119864 minus 119869 minus 1 6119873119864119869 minus 3119873119864 + 119869
2minus 119869 minus 2
MEM 2119873119864 2119873119864 + 119873119864119869 + 119869 119873119864119869 + 4119873119864 + 119869
MSNWFMUX 119873119864119869 + 119869 119873119864119869 + 2119869 2119873119864119869 + 3119869
119874 [119873119864119869]ADD 119873119864119869 119873119864119869 + 2119869 2119873119864119869 + 2119869
MEM 119873119864 119873119864 + 2 2119873119864 + 2
MVDRMUX 3119873119864 3(119873119864)
3+ (119873119864)
23(119873119864)
3+ (119873119864)
2+ 3119873119864
119874 [(119873119864)3]ADD 2(119873119864)
2minus 2119873119864 3(119873119864)
3minus 2(119873119864)
2minus 119873119864 3(119873119864)
3minus 3119873119864
MEM (119873119864)2+ 119864
2119873119864 (119873119864)
2+ 119864
2+ 119873119864
C-MVDRMUX 3119875119876 3(119875119876)
3+ (119875119876)
23(119875119876)
3+ (119875119876)
2+ 3119875119876
119874 [(119875119876)3]ADD 2(119875119876)
2minus 2119875119876 3(119875119876)
3minus 2(119875119876)
2minus 119875119876 3(119875119876)
3minus 3119875119876
MEM (119875119876)2+ 119876
2119875119876 (119875119876)
2+ 119876
2+ 119875119876
WBI
NBI
23249
15
1314
29
12
3
11
1
2
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
260∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
(a)
0
NBI
23249
15
1314
29
12
3
11
1
2
WBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0∘
0∘90∘
60∘
60∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
30∘
(b)
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘13
15
14
29
2623
12
24 9
31
11
2
WBI
NBI
(c)
13
15
14
29
23
12
249
31
11
2
WBI
NBI
minus50
minus45
minus40
minus35
minus30
minus25
minus20
minus15
minus10
minus5
0
0∘
0∘90∘
60∘
60∘30∘
30∘120∘
150∘
180∘
240∘
210∘
270∘300∘
330∘
26
(d)Figure 2 The gain patterns with and without compression measurement (1198701015840
= 3600 119876 = 17 and 119861 = 200) (a) without compressionmeasurement (4 antennas) (b) with compression measurement (4 antennas) (c) without compression measurement (9 antennas) (d) withcompression measurement (9 antennas)
6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Antennas and Propagation
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
(a) Original (119864 = 5 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
set (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(b) Compressed (119864 = 9 taps)
AOA (deg)
Dop
pler
freq
uenc
y off
est (
kHz)
0 30 60 90
002040608
1
WBI
NBI
Pow
er g
ain
(dB)
0
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(c) Compressed (119864 = 20 taps)
Pow
er g
ain
(dB)
0
AOA (deg)
Dop
pler
freq
uenc
y (k
Hz)
0 30 60 90
002040608
1
NBI
WBI
minus10
minus20
minus30
minus40
minus50
minus60
minus70
minus80
minus90 minus60 minus30minus1
minus08
minus06
minus04
minus02
(d) Compressed (119864 = 50 taps)
Figure 3The angle-frequency spectrum with and without compression measurement (1198701015840119870 = 07) (a) without compression measurement
(b) with compression measurement under 9 delay taps (c) with compression measurement under 20 delay taps (d) with compressionmeasurement under 50 delay taps
illustrates the relation between system complexities of differ-ent STAP algorithms in different update procedures [24]Theimplementation difference of each algorithm is assessed usingthe number of multiplier (MUX) adder (ADD) and datamemory (MEM) Table 2 shows that with the reduction of119873and 119864 the total computation time of C-MVDR will decreaseby cube root as opposed to that of MVDR In addition thetotal hardware implementation complexity will reduce a lot
3 Simulation Results
The analysis and assessment of the proposed system areillustrated and verified in this section Uniform rectangulararray (URA) with half of wavelength spacing is utilized in theproposed system under no mutual coupling condition Thenumber of antenna elements is associated with the numberof narrowbandwideband interferences that can be cancelledby the STAP algorithm All antennas are assumed to be idealand have an omnidirectional radiation pattern In general thenumber of broadband interferences that can be eliminated bythe spatial-temporal filtering corresponds to119875minus1 [4] Assumethat IF frequency of GNSS signal is 125MHz with a sampling
rate of 119865119904 = 5MHz and the reception data length is 119879 = 1ms(equal to 119870 = 119865119904119879 = 5000 samples) The compressionmatrices Φ119901 and Φ119902 are generated using random Gaussiandistribution The Monte Carlo simulation is conducted for500 runs to assess the performance of proposed system underjammed environment
First the GPS YUMA almanacs data [25] and MATLABsoftware are employed to simulate the distribution of LOSsatellites (total thirteen) in the sky All GPS satellite signals arereceived at different azimuth and elevation with minus15sim minus10 dBSNR in average Assume that incident direction of widebandinterference is at azimuth 330 degree and 53 elevation degreeand the direction of arrival of narrowband interference is atazimuth 110 degree and 38 elevation degree All the INR ofinterference is set at 30 dB The number of tap delay elementis 119861 = 10 Figures 2(a) and 2(b) show the 3D gain pattern asa function of azimuth and elevation angle with and withoutcompression measurement under 4 antennas respectivelyThe spatial and temporal compression ratio is set as 120581 =
075 and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 =
200) respectively Figures 2(a) and 2(b) illustrate that bothmethods can effectively mitigate interference In particular
International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 7
Figure 2(b) shows that the proposed method yields betterwideband and narrowband interference mitigation perfor-mance When the antenna number is increased to 9 and thespatial and temporal compression ratio is set as 120581 = 075
and 120578 = 072 (1198701015840= 3600 119876 = 17 and 119861 = 200)
respectively a null has been steered toward its DOA in aparticular frequency (minus473 dB forWBI andminus451 dB forNBI)for each interference (see Figures 2(c) and 2(d)) Thus theGNSS signals arriving from the same direction can still bedistinguished in the frequency domain by a compressionspatial-temporal process For the wideband interference anull should be placed in its entire frequency band (seeFigure 3)
In Figure 3 at an elevation of 53 degree where thewideband interference is received a null is steered towardthat direction for all frequencies Meanwhile increasing thenumber of delay tap can obtain the deep null gain towardinterference direction However the increasing number oftime delay taps will result in more sidelobes within theDoppler frequency range (plusmn02 KHz) of the desired signalWhen the estimation of AOA andDoppler shift is inaccuratethe directivity outputs SINR which can be observed inFigure 4 However the increasing number of time delay tapswill result in more sidelobes within the Doppler frequencyrange (plusmn02 KHz) of the desired signal When the estimationof AOA and Doppler shift is inaccurate the directivity gainof the desired signal will reduce a lot which will also reduceoutput SINR as observed in Figure 4
A comparison of the two realizations in terms of SINRimprovement varying with the number of delay tap isdepicted in Figure 4 The SINR improvement is definedas the difference between the output and input SINR [426] It is found that increasing the number of delay tapscontinuously does not improve the antijam performancewhich simultaneously denotes output SINR It is due to theincrement of time delay taps that can lead to the desired signalcomponent to be partially mitigated or cancelled whichresults in poor SINR improvement performance Selectingthe appropriate number of delay taps is important to enhancesystem antijam performance
The comparison of hardware implementation complexityof proposed system and traditional STAP under differentspace compression ratio and time compression ratio is illus-trated in Figure 5 The definition of total complexity is thesum of the number of adders subtractors and multipliersThis value indicates that the hardware implementation costwill be lower if the space and time compression ratio is lowerNevertheless when the space and time compression ratio isbelow the lower limit the proposed method fails to mitigateinterferenceThe analysis is feasible if the number of antennasand time delay taps is more than four and five respectively
4 Conclusions
The combination of compressive spatial-temporal filter withan MVDR processing can mitigate narrowband and wide-band interferences in GNSS receiver As long as spatial-temporal compression matrices can satisfy RIP with highprobability and adopt suitable tap number the proposed
0 5 10 15 20 25 30 35 40 45
0
2
4
6
8
10
12
Number of tap delay
SIN
R im
prov
men
t (dB
)
CompressedOriginal
Quadratic fit (compressed)Quadratic fit (original)
minus4
minus2
Figure 4 SINR improvement as a function of number of delay taps
20 40 60 80 100 120 140
Tota
l com
plex
ity
Original
107
106
105
104
103
120581 = 095 120578 = 095
120581 = 075 120578 = 072
120581 = 065 120578 = 06
120581 = 055 120578 = 06
120581 = 04 120578 = 06 (boundary)
Snapshot (P times Q)
Figure 5 Comparison of hardware complexity under differentspatial compression ratio (120581) and temporal compression ratio (120578)
method can obtain robust interference mitigation perfor-mance The compression process consumes system compu-tation time that can significantly reduce time after MVDRfor a compressed sample In terms of total system compu-tation time the use of compression sensors is still betterthan not using them The reduced hardware implementationcomplexity and computation load aremore apparent with theincreasing number of antennas and time delay taps In theproposedmethod the interferences can be distinguished by aspatial-temporal process within the sameDOA of signals anda null gain is placed in its entire frequency band In additionthe compression method applied to spatial-temporal signalreception model can reduce the hardware complexity and
8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Antennas and Propagation
computation time up to 735-fold with a temporal compres-sive ratio of 072 during interferencemitigation process underfour antenna elements This method is conducive for futureantijam module miniaturization
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The authors would like to thank the Ministry of Scienceand Technology of Taiwan for financial support to this work(Grant no NSC 102-2221-E-020-007)
References
[1] R L Fante and J J Vaccaro ldquoWideband cancellation of inter-ference in a GPS receive arrayrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 36 no 2 pp 549ndash564 2000
[2] T K Sarkar and R Adve ldquoSpace-time adaptive processing usingcircular arraysrdquo IEEE Antennas and Propagation Magazine vol43 no 1 pp 138ndash143 2001
[3] P Xiong M J Medley and S N Batalama ldquoSpatial andTemporal Processing for Global Navigation Satellite Systemsthe GPS receiver paradigmrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 39 no 4 pp 1471ndash1484 2003
[4] C-L Chang ldquoSelf-tuning synthesis filter against mutual cou-pling and interferences for GNSS and its implementation onembedded boardrdquo EURASIP Journal on Advances in SignalProcessing vol 2010 Article ID 123625 2010
[5] S Daneshmand A Broumandan J Nielsen and G LachapelleldquoInterference and multipath mitigation utilising a two-stagebeamformer for global navigation satellite systems applica-tionsrdquo IET Radar Sonar amp Navigation vol 7 no 1 pp 55ndash662013
[6] J FDegurse L Savy SMarcos and J PMolinie ldquoDeterministicaided STAP for target detection in heterogeneous situationsrdquoInternational Journal of Antennas and Propagation vol 2013Article ID 826935 10 pages 2013
[7] H Keshvadi A Broumandan and G Lachapelle ldquoSpatialcharacterization of GNSS multipath channelsrdquo InternationalJournal of Antennas and Propagation vol 2012 Article ID236464 15 pages 2012
[8] C-L Chang ldquoMultiplexing scheme for anti-jamming globalnavigation satellite system receiversrdquo IET Radar Sonar andNavigation vol 6 no 6 pp 443ndash457 2012
[9] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[10] E J Candes andT Tao ldquoNear-optimal signal recovery from ran-dom projections universal encoding strategiesrdquo IEEE Transac-tions on InformationTheory vol 52 no 12 pp 5406ndash5425 2006
[11] J A Tropp and A C Gilbert ldquoSignal recovery from randommeasurements via orthogonal matching pursuitrdquo IEEE Trans-actions on Information Theory vol 53 no 12 pp 4655ndash46662007
[12] T Blumensath and M E Davies ldquoIterative thresholding forsaparse approximationsrdquo Journal of Fourier Analysis and Appli-cations vol 14 no 5-6 pp 629ndash654 2008
[13] A Majumdar R K Ward and T Aboulnasr ldquoCompressedsensing based real-time dynamic MRI reconstructionrdquo IEEETransactions on Medical Imaging vol 31 no 12 pp 2253ndash22662012
[14] J Yang J Thompson X Huang T Jin and Z Zhou ldquoRandom-frequency SAR imaging based on compressed sensingrdquo IEEETransactions on Geoscience and Remote Sensing vol 51 no 2pp 983ndash994 2013
[15] W U Bajwa J Haupt A M Sayeed and R Nowak ldquoCom-pressed channel sensing a new approach to estimating sparsemultipath channelsrdquo Proceedings of the IEEE vol 98 no 6 pp1058ndash1076 2010
[16] A C Gurbuz J H McClellan and V Cevher ldquoA compressivebeamforming methodrdquo in Proceedings of the IEEE Interna-tional Conference on Acoustics Speech and Signal Processing(ICASSP rsquo08) pp 2617ndash2620 April 2008
[17] YWang G Leus and A Pandharipande ldquoDirection estimationusing compressive sampling array processingrdquo in Proceedingsof the IEEESP 15th Workshop on Statistical Signal Processing(SSP rsquo09) pp 626ndash629 Cardiff UK September 2009
[18] C-L Chang and G-S Huang ldquoSpatial compressive arrayprocessing scheme against multiple narrowband interferencesfor GNSSrdquo in Proceedings of the IEEE 1st AESS EuropeanConference on Satellite Telecommunications (ESTEL rsquo12) RomeItaly October 2012
[19] R Baraniuk M Davenport R DeVore and M Wakin ldquoAsimple proof of the restricted isometry property for randommatricesrdquo Constructive Approximation vol 28 no 3 pp 253ndash263 2008
[20] S Hyakin Adaptive Filter Theory Prentice Hall Upper SaddleRiver NJ USA 4th edition 2002
[21] Y T J Morton L L Liou D M Lin J B Y Tsui and Q ZhouldquoInterference cancellation using power minimization and self-coherence properties of GPS signalsrdquo in Proceedings of the 17thInternational Technical Meeting of the Satellite Division of theInstitute ofNavigation (IONGNSS rsquo04) pp 132ndash143 LongBeachCalif USA September 2004
[22] W L Myrick M D Zoltowski and J S Goldstein ldquoAnti-jamspace-time preprocessor for GPS based on multistage nestedWiener filterrdquo in Proceedings of the IEEE Military Communica-tions Conference (MILCOM rsquo99) pp 675ndash681 November 1999
[23] J Li P Stoica and Z Wang ldquoOn robust capon beamformingand diagonal loadingrdquo IEEE Transactions on Signal Processingvol 51 no 7 pp 1702ndash1715 2003
[24] C L Chang and B HWu ldquoAnalysis of performance and imple-mentation complexity of array processing in anti-jammingGNSS receiversrdquo Electrical and Electronic Engineering vol 1 no2 pp 79ndash84 2011
[25] T S Kelso ldquoGPS YUMA Almanacsrdquo 2012 httpscelestrakcomGPSalmanacYuma
[26] J-C Juang and C-L Chang ldquoPerformance analysis of GPSpseudolite interference mitigation using adaptive spatial beam-formingrdquo in Proceedings of the 61st Annual Meeting of TheInstitute of Navigation pp 1179ndash1187 Cambridge Mass USAJune 2005
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of