Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 281523 9 pageshttpdxdoiorg1011552013281523
Research ArticleHybrid Modeling of Flotation Height in Air Flotation OvenBased on Selective Bagging Ensemble Method
Shuai Hou Fuan Hua Wu Lv Zhaodong Wang Yujia Liu and Guodong Wang
The State Key Laboratory of Rolling and Automation Northeastern University Shenyang 110819 China
Correspondence should be addressed to Shuai Hou houshuai20072163com
Received 20 September 2013 Accepted 14 November 2013
Academic Editor Didier Georges
Copyright copy 2013 Shuai Hou et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The accurate prediction of the flotation height is very necessary for the precise control of the air flotation oven process thereforeavoiding the scratch and improving production quality In this paper a hybrid flotation height predictionmodel is developed Firstlya simplified mechanismmodel is introduced for capturing the main dynamic behavior of the processThereafter for compensationof the modeling errors existing between actual system and mechanism model an error compensation model which is establishedbased on the proposed selective bagging ensemble method is proposed for boosting prediction accuracy In the framework of theselective bagging ensemble method negative correlation learning and genetic algorithm are imposed on bagging ensemble methodfor promoting cooperation property between based learners As a result a subset of base learners can be selected from the originalbagging ensemble for composing a selective bagging ensemble which can outperform the original one in prediction accuracy with acompact ensemble size Simulation results indicate that the proposed hybridmodel has a better prediction performance in flotationheight than other algorithmsrsquo performance
1 Introduction
Air flotation oven is a type of advanced heat treatmentequipment By virtue of the air flotation ovens a variety ofstrips with high surface quality and high performance can beobtained [1] Due to its excellent performance a considerableattention and many excellent researches on this topic havebeen reported in the literature [1ndash9] In air flotation oventhe flotation height of the strip is an important factor How-ever the flotation height is difficult be measure because ofhigh-temperature work environment and signal interferencewhich is an obstacle to the optimal control of the process andmay reduce the product quality Therefore the research onthe prediction of flotation height becomes more and moreattractive in the air flotation oven [1 5 9] based on whichhigh-precision control can be realized As a result high-product quality can be finally obtained
Mechanismmodeling based on fluidmechanics and solidmechanics is a way for establishing the prediction modelof flotation height There are some mechanism models thatcan be found in the literature [1ndash8] Greenrsquos function and
Galerkinrsquos method are applied to the research of air flota-tion oven The theoretical calculation and experiment arereported The flotation height of strip is predicted in theorycalculation and compared with experiment result [1] Thebasic theory governing of air flotation oven is discussedwhichhas been used to predict the flotation height of air cushioncraft [3] The flotation height is given which is based on theextensional resiliency model of an air-floated web [5] Theformula of flotation height is given which is based on thestriprsquos lateral deflection The governing partial differentialequations are applied to the lateral deflection of strip [6] Insummary the mechanism models are good tools for processanalysis However there are some drawbacks One majordrawback is that the mechanism model should be based onstrict assumptions such as linearity assumption and indepen-dence assumption among variables As a result the predictionaccuracy of the mechanism model will be decreased Fur-thermore the mechanism models generally have a complexstructure whichmakes them difficult to adjust Moreover themechanism model may involve partial-differential part orintegral part that is hard to solve and the computational cost is
2 Mathematical Problems in Engineering
considerable which makes it unsuitable for online industrialcontrol The above drawbacks limit the application of mech-anism method to the real world and bring a low predictionaccuracy in flotation height prediction
In the past decades process modeling by machine learn-ing algorithms has drawn more and more attention and hasbeen applied to the industrial process successfully [8ndash19]Various machine learning algorithms have the advantages ofhigh accuracy and simple modeling process The machinelearning process can automatically extract knowledge fromtraining data by which the difficult-to-measure variableflotation height can be predicted by the easy-to-measure vari-ables According to previous studies machine learning canlearn the complex process or nonlinear relationship betweeninput-output variables very well Finally a simple structuremodel can be derived [11] Neural network and SVM are twopopular machine learning algorithms [12 13] They possessgood learning ability and have been widely used in variousprocess modeling problems However neural network andSVM have their own drawbacks There are some parametersin these learning algorithms which are hardly determinedMoreover these learning algorithms easily overfit the trainingdata As a result the prediction performance becomes badFor solving these problems ensemble learning has beenproposed recently [20ndash24] Ensemble learning constructs ahighly accurate prediction model by combining an ensembleof several neural network or SVMs The individual NN orSVM in the ensemble needs only to be moderately accurateon the training set Many research studies prove that theensemble model shows better prediction performance com-pared with the individual models
Ensemble learning has drawnmany researchersrsquo attentionin the literature recently [20ndash27] Bagging is a famous ensem-ble learning algorithmwhich has already been widely used toimprove the accuracy of classification and regression prob-lems [21ndash24] The advantage of bagging is the good perfor-mance of robustness [21 22] The disadvantage of bagging isthat the individualmodels are not cooperatedwith each otherwhich may establish a relatively large ensemble size and lowaccurate ensemble learning model NCL is another famousensemble learning method [25ndash27] which explicitly pro-motes cooperation between individual models Thereforeits learning ability is perfect A drawback of NCL is that theoverfitting problem may occur In summary the commonproblems of various ensemble learning algorithms are thedetermination of the optimal ensemble size the training ofthe base learners and the fusion strategy of the ensemble
In this paper a hybrid flotation height prediction modelis developed for combining the well generalization perfor-mance of mechanism modeling method and the excellentlearning ability ofmachine learning algorithms In the frame-work of the proposed hybrid model a simplified mechanismmodel is introduced for description of the main knowledgeand complemented by an error compensation model inthe air flotation process The simplified mechanism modelis based on thin jet model which is a branch of fluidmechanics and is very suitable for description of the behaviorin air flotation oven Furthermore in order to compensatethe modeling error of the simplified mechanism model
and improve the flotation height prediction accuracy anerror compensation model is introduced for describing theunknown structure part that is hardlymodeled by themecha-nisticway Because of the excellent ability ofmachine learningin nonlinearity problem and complex process problem theerror compensation model is established on the basis ofmachine learning algorithms In the current study an errorcompensation model is proposed which is a modificationalgorithm based on existing ensemble learning algorithmsThe proposed ensemble method is basically a selective bag-ging ensemble method where GA NCL and bagging arecombined in the way that the base learners are selected fromoriginal bagging ensemble by GA and NCL The proposedmethod can retain the robustness property of bagging whilstfurther improving its prediction accuracy by thewell learningability of NCL method
The remainder of this paper is organized as follows InSection 2 the details of the ground effect theories and themathematical mechanism model of floatation height are pre-sented In Section 3 the proposed selective bagging ensemblemethod (SBE) is introduced Section 4 reports the hybridmodel based on mechanism model and selective baggingensemble model Section 5 reports the experimental resultsSection 6 draws conclusions and future research directions
2 Mathematical Mechanism Model ofthe Flotation Height
21 Brief Review of Air Flotation Process High quality pro-duction of cold rolled metal alloy strips and coating metalstrips requires continuous heat treatment including alu-minum strip copper strip and steel strip Air flotation ovensare used for effectively coating and heating strips where themetal strip can suspend in the air without contacting any-thingTherefore coating destruction is avoided and good sur-face quality can be finally realized Furthermore it can pro-vide the necessary temperature uniformity along the widthand length of strip As a result compared with conventionalcontinuous furnaces air flotation oven can product betterperformance and quality product in the heat treatment pro-cess of cold-rolled metal strip Commonly air flotationoven is followed by a sufficiently fast cooling equipment forguaranteeing desired material properties such as hardnessand grain size
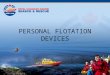
This paper studies an air flotation oven that is specificallyused for the heat treatment of aluminum strip which isschematically shown in Figure 1 The aluminum strips passthrough between the upper nozzles and lower nozzles at aconstant speedThe aluminum strip is suspended and heatedby the hot air emerging from the upper nozzles and lowernozzles which are arranged on upper surface and lower sur-face of air flotation oven
It can be seen from Figure 1 that there are two slit nozzleson top surface of the upper nozzles and lower nozzle inparallelThe air is ejected from these slit nozzles and squirtedonto the surface of the aluminum strip The external wallwhich is parallel to the slit has the angle against the airflotation oven The ratio of the flow rate of the upper nozzle
Mathematical Problems in Engineering 3
Aluminum strip
middot middot middotmiddot middot middot
middot middot middotmiddot middot middot
hd
Pt1 Pt1 Pt1
Pt2 Pt2
Figure 1 Aluminum strip and air bars in air flotation oven
Figure 2 The single nozzle and the floating aluminum strip
to the lower nozzle is adjusted by the blowerrsquos rotating speedFurthermore the changes of the blowerrsquos rotating speed caninfluence the pressure of the lower nozzle 119875
1199051and that of the
upper nozzle 1198751199052
During the air flotation process flotation height is animportant variable which is defined as the distance betweenthe rigid web and lower nozzles If the floating strips areclose to the upper or lower nozzles strip scratch may occurwhichmay cause the product to abandonTherefore flotationheight should be controlled in a proper position in order toguarantee sufficient margin between the upper nozzles andlower nozzles After theoretical analysis the flotation height isdetermined by various parameters such as air density densityof the aluminum alloy strip thickness upper nozzle pressure1198751199051 and lower nozzle pressure 119875
1199052
22 Mechanism Model of Flotation Height Generally alu-minum strip has strong hardness When the aluminum stripis floating in the air the deflection of aluminum strip is smallwhich can be seen in Figure 2Therefore in the developmentof the proposedmechanismmodel the aluminum strip shapeis considered as straight in the horizontal direction Basedon the above consideration ground effect theory is appliedin this study which is proven to be useful for describing theaerodynamic characteristics of pressure-pad air bars in airflotation oven [1 3 5 6]
The ground effect theories are worked under the follow-ing assumption [3]
(1) the thickness of jet flow is much smaller than theflotation height (119887ℎ ≪ 1) and does not change alongthe path of the jet
(2) the flow profile across the jet is uniform
(3) the jet speed does not change along the path of the jet
(4) the path of the jet flow has a constant curvature andis tangent to the ground
(5) the pressure in the region surrounded by the twostreams of air jet is constant
On the basis of ground effect theories the vertical forcebalance for the air jet requires
1205881198871198812
119895(1 + cos 120579) = 119875
119888lowast ℎ (1)
where 120588 is the air density 119887 is the slit nozzlersquos width 119881119895is the
air velocity and 119875119888is the cushion pressure (gage pressure)
The effective total pressure (gage pressure) of the air jet afterthe nozzle is
119901119895
=119875119888
2+
1205881198812
119895
2 (2)
where the static pressure is assumed to be the average of theambient pressure and the cushion pressure because these twopressures are acting on the two sides of the air jet nozzleSubstituting (1) into (2) the pressure ratio is as follows
119875119888
119875119905
=2 (1 + cos 120579)
ℎ119887 + 1 + cos 120579 (3)
The lift force per unit length of air bar is
119865 = 119875119888119908 + 2120588119887119881
2
119905sin 120579 (4)
where 119908 is the distance between the two slot nozzlesThe lastterm in (4) is the momentum change of two air jets in thevertical direction By eliminating 119875
119888and 120588119887119881
2
119905from (4) using
(1) and (3) the equation is as follows
119865 =119875119888
119875119905
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 119875119905lowast 119887 (5)
The lower floatation force 1198651 is
1198651 =1198751198881
1198751199051
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 1198991
lowast 1198751199051
lowast 119887 (6)
where ℎ119889is the distance between the bottom surface of upper
nozzles and the top surface of lower nozzles (seen in Figure 1)and 119899
1is the number of lower nozzles The upper floatation
nozzlersquos flotation is ℎ119889
minus ℎ The upper nozzles force 1198652 is
1198652 =1198751198882
1198751199052
lowast (119908
119887+
ℎ119889
minus ℎ
119887
2 sin 120579
1 + cos 120579) 1198992
lowast 1198751199052
lowast 119887 (7)
where 1198992is the number of upper nozzles The strip will float
at a height where the combination of the aluminum striprsquosweight and the air force due to the upper nozzle just balancesthe upward force due to the lower nozzles [5] Consider
1198651 minus 1198652 = 119866 (8)
4 Mathematical Problems in Engineering
where1198651 is lower floatation force1198652 is upper floatation forceand 119866 is the weight of the strip Substituting (6) and (7) into(8) (9) is as follows
[4119887 sin 120579 (11989911198751199051
minus 11989921198751199052
) minus 119866] ℎ2
+ [ℎ119889119866 minus 4ℎ
119889119887 sin 120579 (119899
11198751199051
minus 11989921198751199052
) + 2119887 (1 + cos) 120579]
times (11989911198751199051
+ 11989921198751199052
) (119908 minus 2119887) sin 120579ℎ + 119887 (1 + cos 120579)
times ℎ119889119866 + 119887 (1 + cos 120579) [119866 minus 2119908 (119899
11198751199051
minus 11989921198751199052
)]
minus 2ℎ11988911990811989911198751199051
+ 4ℎ119889119887 sin 120579119899
21198751199052
= 0
(9)
The flotation height ℎ can be solved from (9)
3 Selective Bagging EnsembleUsing NCL and GA
In this study LSSVR is used as the base learning algorithmThemain contribution of current study focuses on the design-ing of ensemble method while LSSVR is directly used with-out modification Therefore LSSVR will not be introducedand the details of it can be founded in [28 29]
In the following the basic principle of bagging and NCLis firstly introduced Thereafter a selective bagging ensemblewill be proposed
31 The Basic Idea of Bagging For bagging algorithm eachtraining subset contains 119899 learning samples which is drawnrandomly with replacement from the original training set ofsize119873 Such a training subset is called a bootstrap replicate ofthe original set Instead of making predictions from a singlemodel that is fitted to the observed data a number of predic-tions models are developed to predict the relationship bet-ween input and output variables Each model is developedfrom the multiple models which are combined to improvemodel accuracy and robustness [21 22]
Let 119879 = (119909119901 119910119901 119901 = 1 119873) denote a regression type
training set and the SVM algorithm uses 119879 to construct aregression predictor 119865
119877(119909 119879) to predict 119910 values Let 119865 be a
bagging ensemble algorithm obtained as a simple averagingcombination of 119872 predictors that is
119865 (119909119901) =
1
119872
119872
sum
119894=1
119891119894(119909119901) (10)
where 119872 is the number of the individual SVM in the ensem-ble algorithm 119891
119894(119909119901) is the output of SVM 119894 on the data set
and 119865(119909119901) is the output of the ensemble algorithm on the
data set
32 The Basic Idea of NCL NCL implicitly creates differenttraining sets by encouraging different individual models tolearn different parts or aspects of the training data so that all
networks can be trained simultaneously and interactively onthe same training data set 119879 [29 30] as follows
119862119894= (119891119894(119909119901) minus 119865 (119909
119901))
times sum
119895 = 1
(119891119894(119909119901) minus 119865 (119909
119901)) = minus (119891
119894(119909119901) minus 119865 (119909
119901))2
(11)
The error function 119864119894for SVR 119894 in negative correlation learn-
ing is defined as
119864119894=
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (12)
The parameter 0 le 120582 le 1 is used to adjust the strength ofthe penaltyThe simple averaging of the ensemble in negativecorrelation learning is defined as
119864119894=
1
119872
119872
sum
119894=1
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (13)
33 Selective Bagging Using NCL In bagging ensemble algo-rithm the accuracy of the individual model is not wellcontrolled If there are some uncorrected individual modelswith large bias the overall prediction performance of theensemble model may deteriorate Therefore the accuracy ofthe individual model is managed in this paperThe individualmodel with undesirable precision is retrained until its desiredaccuracy is obtained
Moreover the individual models in the original baggingensemble are trained independently There is insufficientcooperation between them which may worse the overallprediction performance Furthermore the original baggingensemble is inefficient due to its relatively large ensemble sizeIn order to address above two problems NCL algorithm isintroduced to bagging ensemble algorithm so the coopera-tion between individual models can be improved By virtueof NCL the individual models cooperated with each other inthe original bagging ensemble and the redundant individualmodels with no contribution to prediction accuracy can bepruned from original bagging ensemble
Bymodification ofNCL the error function119864119894for 119894th indi-
vidual model in selective bagging is as follows
119864119894= 119908119894sdot
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (14)
Similar to NCL the parameter 0 le 120582 le 1 is used to adjustthe strength of the penalty The simple average of selectivebagging is shown as follows
119864 =
119872
sum
119894=1
119908119894
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894))
subject to sum
119894
119908119894= 1 0 le 119908
119894le 05 119894 = 2 3 119872
(15)
Then the remaining problem is the determination of theweight 119908
119894 which will be described in the following section
Mathematical Problems in Engineering 5
Input variablesFloatation process Online tested by laboratory
Mechanism model
Error compensationmodel
The floatationheight predictedby hybrid model
+
+
+
minus
Figure 3 Hybrid model structure
34 Solving the Selective Bagging Ensemble Problem UsingGenetic Algorithm In our proposed algorithm genetic algo-rithm is used to solve the optimization problem (15)Theopti-mal subset is selected from the pool of the ensemble algo-rithms
In genetic algorithm the chromosomes are representedby a binary string of length 119870 times 119899 in which 119870 is fixed inalgorithm main Individual algorithm is encoded in a binarylength of size 119899 To illustrate this point the individual SVRalgorithms are encoded as follows (in1 = 0000 in2 = 0001
inGA119901 = 1111) and the chromosomes are encoded as fol-lows (ch1 = 00000000 ch2 = 001011 chGA119901 = 111001)
In the chromosomes of existing population individualsare repeatedly selected for breeding until the new populationis saturated The fitness proportionate selection of roulette-wheel is applied to this proposed algorithm and the fitnessfunction is (15) The chromosomes will be selected crossedover and mutated in the optimal process In the selectingprocess the standard elitism approach is adopted so the evo-lution process can become more stable and converges earlierDuring the crossover and mutation processes the single-point crossover method and flip-flop single-point mutationis applied Generally the average fitness function will beimproved according to the genetic operators of crossoverandmutationHowever undesired chromosomesmay appearrepeatedly in the process For example in the two chromo-somes (110100 100110) 119899 = 3 and 119870 = 2 if single point cross-over point occurs the new spring will be (110110 100100)Similarly given a chromosome 111101 if mutation happensat the second point the new offspring will be 111111 Undersuch circumstances the chromosomes are treated as badindividuals for evolution
In our method the optimization problem (15) is solvedin a sequential wayThe ensemble size increases progressivelyand the ensemble size is finally confined by a simple approachSpecifically genetic algorithm is firstly used to solve the opti-mization problem (15) with a fixed ensemble size 2Thereforeit can select two individual models from a pool of individualmodels to compose an ensemble model 119864
2 Similarly an
ensemble model 1198643with three individual models can then be
establishedThereafter comparison is carried out between 1198642
and 1198643 If the value of objective function of 119864
3is smaller than
1198642 the algorithm is expanded to find the best ensemble with
four individual models and so on The algorithm convergesand the increment of ensemble size stops when the value
of objective function corresponding to the ensemble modelincreases It can be concluded that the minimum ensembleerror and the optimal ensemble size can be obtained by thisensemble way In each iteration it can be found that geneticalgorithm (GA) is used to search for the best ensemble size 119870
thatminimizes the fitness function (15)The selection processis explained in main algorithm
The hybrid selective ensemble process is as follows
Algorithm Main
Step 1 Generate training subset 119879119894from 119879 by bootstrap sam-
pling algorithm Train an individual model 119891119894on the training
subset 119879119894by SVM algorithm
Step 2 Calculate the training error 119864119894of 119891119894by (14) If 119864
119894gt 1198901
repeat Step 1 otherwise if 119894 = 119894 + 1 build SVMmodel 119891119894with
119879119894
Step 3 119870 = 2
Step 4 Find the best ensemble individual models of 119870 and119870 + 1 models by GA
Step 5 If the 119891119894is selected in Step 4 then 119908
119894= 1119870
otherwise 119908119894= 0
Step 6 Evaluate ensemble error En119870and En
119870+1on validation
set 119863V by (15) Evaluate En119870+1 on 119863V
Step 7 If En119870
gt En119870+1
and 119870 = 119870 + 1 repeat Step 4otherwise go to Step 8
Step 8 Output 119865(119909119901) = (1119870) sum
119870
119894=1119891119894(119909119901)
4 Hybrid Model Based on Selective BaggingEnsemble Method
In this paper a hybrid flotation height prediction model isdeveloped which is made up of mechanism model and datamodel The data model is a new method based on selectivebagging ensemble and it is used as the error compensationmodel of hybrid model The structure of the hybrid modelis shown in Figure 3 Based on the mechanism analysisthe input variables of the hybrid model are determined air
6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
considerable which makes it unsuitable for online industrialcontrol The above drawbacks limit the application of mech-anism method to the real world and bring a low predictionaccuracy in flotation height prediction
In the past decades process modeling by machine learn-ing algorithms has drawn more and more attention and hasbeen applied to the industrial process successfully [8ndash19]Various machine learning algorithms have the advantages ofhigh accuracy and simple modeling process The machinelearning process can automatically extract knowledge fromtraining data by which the difficult-to-measure variableflotation height can be predicted by the easy-to-measure vari-ables According to previous studies machine learning canlearn the complex process or nonlinear relationship betweeninput-output variables very well Finally a simple structuremodel can be derived [11] Neural network and SVM are twopopular machine learning algorithms [12 13] They possessgood learning ability and have been widely used in variousprocess modeling problems However neural network andSVM have their own drawbacks There are some parametersin these learning algorithms which are hardly determinedMoreover these learning algorithms easily overfit the trainingdata As a result the prediction performance becomes badFor solving these problems ensemble learning has beenproposed recently [20ndash24] Ensemble learning constructs ahighly accurate prediction model by combining an ensembleof several neural network or SVMs The individual NN orSVM in the ensemble needs only to be moderately accurateon the training set Many research studies prove that theensemble model shows better prediction performance com-pared with the individual models
Ensemble learning has drawnmany researchersrsquo attentionin the literature recently [20ndash27] Bagging is a famous ensem-ble learning algorithmwhich has already been widely used toimprove the accuracy of classification and regression prob-lems [21ndash24] The advantage of bagging is the good perfor-mance of robustness [21 22] The disadvantage of bagging isthat the individualmodels are not cooperatedwith each otherwhich may establish a relatively large ensemble size and lowaccurate ensemble learning model NCL is another famousensemble learning method [25ndash27] which explicitly pro-motes cooperation between individual models Thereforeits learning ability is perfect A drawback of NCL is that theoverfitting problem may occur In summary the commonproblems of various ensemble learning algorithms are thedetermination of the optimal ensemble size the training ofthe base learners and the fusion strategy of the ensemble
In this paper a hybrid flotation height prediction modelis developed for combining the well generalization perfor-mance of mechanism modeling method and the excellentlearning ability ofmachine learning algorithms In the frame-work of the proposed hybrid model a simplified mechanismmodel is introduced for description of the main knowledgeand complemented by an error compensation model inthe air flotation process The simplified mechanism modelis based on thin jet model which is a branch of fluidmechanics and is very suitable for description of the behaviorin air flotation oven Furthermore in order to compensatethe modeling error of the simplified mechanism model
and improve the flotation height prediction accuracy anerror compensation model is introduced for describing theunknown structure part that is hardlymodeled by themecha-nisticway Because of the excellent ability ofmachine learningin nonlinearity problem and complex process problem theerror compensation model is established on the basis ofmachine learning algorithms In the current study an errorcompensation model is proposed which is a modificationalgorithm based on existing ensemble learning algorithmsThe proposed ensemble method is basically a selective bag-ging ensemble method where GA NCL and bagging arecombined in the way that the base learners are selected fromoriginal bagging ensemble by GA and NCL The proposedmethod can retain the robustness property of bagging whilstfurther improving its prediction accuracy by thewell learningability of NCL method
The remainder of this paper is organized as follows InSection 2 the details of the ground effect theories and themathematical mechanism model of floatation height are pre-sented In Section 3 the proposed selective bagging ensemblemethod (SBE) is introduced Section 4 reports the hybridmodel based on mechanism model and selective baggingensemble model Section 5 reports the experimental resultsSection 6 draws conclusions and future research directions
2 Mathematical Mechanism Model ofthe Flotation Height
21 Brief Review of Air Flotation Process High quality pro-duction of cold rolled metal alloy strips and coating metalstrips requires continuous heat treatment including alu-minum strip copper strip and steel strip Air flotation ovensare used for effectively coating and heating strips where themetal strip can suspend in the air without contacting any-thingTherefore coating destruction is avoided and good sur-face quality can be finally realized Furthermore it can pro-vide the necessary temperature uniformity along the widthand length of strip As a result compared with conventionalcontinuous furnaces air flotation oven can product betterperformance and quality product in the heat treatment pro-cess of cold-rolled metal strip Commonly air flotationoven is followed by a sufficiently fast cooling equipment forguaranteeing desired material properties such as hardnessand grain size
This paper studies an air flotation oven that is specificallyused for the heat treatment of aluminum strip which isschematically shown in Figure 1 The aluminum strips passthrough between the upper nozzles and lower nozzles at aconstant speedThe aluminum strip is suspended and heatedby the hot air emerging from the upper nozzles and lowernozzles which are arranged on upper surface and lower sur-face of air flotation oven
It can be seen from Figure 1 that there are two slit nozzleson top surface of the upper nozzles and lower nozzle inparallelThe air is ejected from these slit nozzles and squirtedonto the surface of the aluminum strip The external wallwhich is parallel to the slit has the angle against the airflotation oven The ratio of the flow rate of the upper nozzle
Mathematical Problems in Engineering 3
Aluminum strip
middot middot middotmiddot middot middot
middot middot middotmiddot middot middot
hd
Pt1 Pt1 Pt1
Pt2 Pt2
Figure 1 Aluminum strip and air bars in air flotation oven
Figure 2 The single nozzle and the floating aluminum strip
to the lower nozzle is adjusted by the blowerrsquos rotating speedFurthermore the changes of the blowerrsquos rotating speed caninfluence the pressure of the lower nozzle 119875
1199051and that of the
upper nozzle 1198751199052
During the air flotation process flotation height is animportant variable which is defined as the distance betweenthe rigid web and lower nozzles If the floating strips areclose to the upper or lower nozzles strip scratch may occurwhichmay cause the product to abandonTherefore flotationheight should be controlled in a proper position in order toguarantee sufficient margin between the upper nozzles andlower nozzles After theoretical analysis the flotation height isdetermined by various parameters such as air density densityof the aluminum alloy strip thickness upper nozzle pressure1198751199051 and lower nozzle pressure 119875
1199052
22 Mechanism Model of Flotation Height Generally alu-minum strip has strong hardness When the aluminum stripis floating in the air the deflection of aluminum strip is smallwhich can be seen in Figure 2Therefore in the developmentof the proposedmechanismmodel the aluminum strip shapeis considered as straight in the horizontal direction Basedon the above consideration ground effect theory is appliedin this study which is proven to be useful for describing theaerodynamic characteristics of pressure-pad air bars in airflotation oven [1 3 5 6]
The ground effect theories are worked under the follow-ing assumption [3]
(1) the thickness of jet flow is much smaller than theflotation height (119887ℎ ≪ 1) and does not change alongthe path of the jet
(2) the flow profile across the jet is uniform
(3) the jet speed does not change along the path of the jet
(4) the path of the jet flow has a constant curvature andis tangent to the ground
(5) the pressure in the region surrounded by the twostreams of air jet is constant
On the basis of ground effect theories the vertical forcebalance for the air jet requires
1205881198871198812
119895(1 + cos 120579) = 119875
119888lowast ℎ (1)
where 120588 is the air density 119887 is the slit nozzlersquos width 119881119895is the
air velocity and 119875119888is the cushion pressure (gage pressure)
The effective total pressure (gage pressure) of the air jet afterthe nozzle is
119901119895
=119875119888
2+
1205881198812
119895
2 (2)
where the static pressure is assumed to be the average of theambient pressure and the cushion pressure because these twopressures are acting on the two sides of the air jet nozzleSubstituting (1) into (2) the pressure ratio is as follows
119875119888
119875119905
=2 (1 + cos 120579)
ℎ119887 + 1 + cos 120579 (3)
The lift force per unit length of air bar is
119865 = 119875119888119908 + 2120588119887119881
2
119905sin 120579 (4)
where 119908 is the distance between the two slot nozzlesThe lastterm in (4) is the momentum change of two air jets in thevertical direction By eliminating 119875
119888and 120588119887119881
2
119905from (4) using
(1) and (3) the equation is as follows
119865 =119875119888
119875119905
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 119875119905lowast 119887 (5)
The lower floatation force 1198651 is
1198651 =1198751198881
1198751199051
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 1198991
lowast 1198751199051
lowast 119887 (6)
where ℎ119889is the distance between the bottom surface of upper
nozzles and the top surface of lower nozzles (seen in Figure 1)and 119899
1is the number of lower nozzles The upper floatation
nozzlersquos flotation is ℎ119889
minus ℎ The upper nozzles force 1198652 is
1198652 =1198751198882
1198751199052
lowast (119908
119887+
ℎ119889
minus ℎ
119887
2 sin 120579
1 + cos 120579) 1198992
lowast 1198751199052
lowast 119887 (7)
where 1198992is the number of upper nozzles The strip will float
at a height where the combination of the aluminum striprsquosweight and the air force due to the upper nozzle just balancesthe upward force due to the lower nozzles [5] Consider
1198651 minus 1198652 = 119866 (8)
4 Mathematical Problems in Engineering
where1198651 is lower floatation force1198652 is upper floatation forceand 119866 is the weight of the strip Substituting (6) and (7) into(8) (9) is as follows
[4119887 sin 120579 (11989911198751199051
minus 11989921198751199052
) minus 119866] ℎ2
+ [ℎ119889119866 minus 4ℎ
119889119887 sin 120579 (119899
11198751199051
minus 11989921198751199052
) + 2119887 (1 + cos) 120579]
times (11989911198751199051
+ 11989921198751199052
) (119908 minus 2119887) sin 120579ℎ + 119887 (1 + cos 120579)
times ℎ119889119866 + 119887 (1 + cos 120579) [119866 minus 2119908 (119899
11198751199051
minus 11989921198751199052
)]
minus 2ℎ11988911990811989911198751199051
+ 4ℎ119889119887 sin 120579119899
21198751199052
= 0
(9)
The flotation height ℎ can be solved from (9)
3 Selective Bagging EnsembleUsing NCL and GA
In this study LSSVR is used as the base learning algorithmThemain contribution of current study focuses on the design-ing of ensemble method while LSSVR is directly used with-out modification Therefore LSSVR will not be introducedand the details of it can be founded in [28 29]
In the following the basic principle of bagging and NCLis firstly introduced Thereafter a selective bagging ensemblewill be proposed
31 The Basic Idea of Bagging For bagging algorithm eachtraining subset contains 119899 learning samples which is drawnrandomly with replacement from the original training set ofsize119873 Such a training subset is called a bootstrap replicate ofthe original set Instead of making predictions from a singlemodel that is fitted to the observed data a number of predic-tions models are developed to predict the relationship bet-ween input and output variables Each model is developedfrom the multiple models which are combined to improvemodel accuracy and robustness [21 22]
Let 119879 = (119909119901 119910119901 119901 = 1 119873) denote a regression type
training set and the SVM algorithm uses 119879 to construct aregression predictor 119865
119877(119909 119879) to predict 119910 values Let 119865 be a
bagging ensemble algorithm obtained as a simple averagingcombination of 119872 predictors that is
119865 (119909119901) =
1
119872
119872
sum
119894=1
119891119894(119909119901) (10)
where 119872 is the number of the individual SVM in the ensem-ble algorithm 119891
119894(119909119901) is the output of SVM 119894 on the data set
and 119865(119909119901) is the output of the ensemble algorithm on the
data set
32 The Basic Idea of NCL NCL implicitly creates differenttraining sets by encouraging different individual models tolearn different parts or aspects of the training data so that all
networks can be trained simultaneously and interactively onthe same training data set 119879 [29 30] as follows
119862119894= (119891119894(119909119901) minus 119865 (119909
119901))
times sum
119895 = 1
(119891119894(119909119901) minus 119865 (119909
119901)) = minus (119891
119894(119909119901) minus 119865 (119909
119901))2
(11)
The error function 119864119894for SVR 119894 in negative correlation learn-
ing is defined as
119864119894=
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (12)
The parameter 0 le 120582 le 1 is used to adjust the strength ofthe penaltyThe simple averaging of the ensemble in negativecorrelation learning is defined as
119864119894=
1
119872
119872
sum
119894=1
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (13)
33 Selective Bagging Using NCL In bagging ensemble algo-rithm the accuracy of the individual model is not wellcontrolled If there are some uncorrected individual modelswith large bias the overall prediction performance of theensemble model may deteriorate Therefore the accuracy ofthe individual model is managed in this paperThe individualmodel with undesirable precision is retrained until its desiredaccuracy is obtained
Moreover the individual models in the original baggingensemble are trained independently There is insufficientcooperation between them which may worse the overallprediction performance Furthermore the original baggingensemble is inefficient due to its relatively large ensemble sizeIn order to address above two problems NCL algorithm isintroduced to bagging ensemble algorithm so the coopera-tion between individual models can be improved By virtueof NCL the individual models cooperated with each other inthe original bagging ensemble and the redundant individualmodels with no contribution to prediction accuracy can bepruned from original bagging ensemble
Bymodification ofNCL the error function119864119894for 119894th indi-
vidual model in selective bagging is as follows
119864119894= 119908119894sdot
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (14)
Similar to NCL the parameter 0 le 120582 le 1 is used to adjustthe strength of the penalty The simple average of selectivebagging is shown as follows
119864 =
119872
sum
119894=1
119908119894
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894))
subject to sum
119894
119908119894= 1 0 le 119908
119894le 05 119894 = 2 3 119872
(15)
Then the remaining problem is the determination of theweight 119908
119894 which will be described in the following section
Mathematical Problems in Engineering 5
Input variablesFloatation process Online tested by laboratory
Mechanism model
Error compensationmodel
The floatationheight predictedby hybrid model
+
+
+
minus
Figure 3 Hybrid model structure
34 Solving the Selective Bagging Ensemble Problem UsingGenetic Algorithm In our proposed algorithm genetic algo-rithm is used to solve the optimization problem (15)Theopti-mal subset is selected from the pool of the ensemble algo-rithms
In genetic algorithm the chromosomes are representedby a binary string of length 119870 times 119899 in which 119870 is fixed inalgorithm main Individual algorithm is encoded in a binarylength of size 119899 To illustrate this point the individual SVRalgorithms are encoded as follows (in1 = 0000 in2 = 0001
inGA119901 = 1111) and the chromosomes are encoded as fol-lows (ch1 = 00000000 ch2 = 001011 chGA119901 = 111001)
In the chromosomes of existing population individualsare repeatedly selected for breeding until the new populationis saturated The fitness proportionate selection of roulette-wheel is applied to this proposed algorithm and the fitnessfunction is (15) The chromosomes will be selected crossedover and mutated in the optimal process In the selectingprocess the standard elitism approach is adopted so the evo-lution process can become more stable and converges earlierDuring the crossover and mutation processes the single-point crossover method and flip-flop single-point mutationis applied Generally the average fitness function will beimproved according to the genetic operators of crossoverandmutationHowever undesired chromosomesmay appearrepeatedly in the process For example in the two chromo-somes (110100 100110) 119899 = 3 and 119870 = 2 if single point cross-over point occurs the new spring will be (110110 100100)Similarly given a chromosome 111101 if mutation happensat the second point the new offspring will be 111111 Undersuch circumstances the chromosomes are treated as badindividuals for evolution
In our method the optimization problem (15) is solvedin a sequential wayThe ensemble size increases progressivelyand the ensemble size is finally confined by a simple approachSpecifically genetic algorithm is firstly used to solve the opti-mization problem (15) with a fixed ensemble size 2Thereforeit can select two individual models from a pool of individualmodels to compose an ensemble model 119864
2 Similarly an
ensemble model 1198643with three individual models can then be
establishedThereafter comparison is carried out between 1198642
and 1198643 If the value of objective function of 119864
3is smaller than
1198642 the algorithm is expanded to find the best ensemble with
four individual models and so on The algorithm convergesand the increment of ensemble size stops when the value
of objective function corresponding to the ensemble modelincreases It can be concluded that the minimum ensembleerror and the optimal ensemble size can be obtained by thisensemble way In each iteration it can be found that geneticalgorithm (GA) is used to search for the best ensemble size 119870
thatminimizes the fitness function (15)The selection processis explained in main algorithm
The hybrid selective ensemble process is as follows
Algorithm Main
Step 1 Generate training subset 119879119894from 119879 by bootstrap sam-
pling algorithm Train an individual model 119891119894on the training
subset 119879119894by SVM algorithm
Step 2 Calculate the training error 119864119894of 119891119894by (14) If 119864
119894gt 1198901
repeat Step 1 otherwise if 119894 = 119894 + 1 build SVMmodel 119891119894with
119879119894
Step 3 119870 = 2
Step 4 Find the best ensemble individual models of 119870 and119870 + 1 models by GA
Step 5 If the 119891119894is selected in Step 4 then 119908
119894= 1119870
otherwise 119908119894= 0
Step 6 Evaluate ensemble error En119870and En
119870+1on validation
set 119863V by (15) Evaluate En119870+1 on 119863V
Step 7 If En119870
gt En119870+1
and 119870 = 119870 + 1 repeat Step 4otherwise go to Step 8
Step 8 Output 119865(119909119901) = (1119870) sum
119870
119894=1119891119894(119909119901)
4 Hybrid Model Based on Selective BaggingEnsemble Method
In this paper a hybrid flotation height prediction model isdeveloped which is made up of mechanism model and datamodel The data model is a new method based on selectivebagging ensemble and it is used as the error compensationmodel of hybrid model The structure of the hybrid modelis shown in Figure 3 Based on the mechanism analysisthe input variables of the hybrid model are determined air
6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Aluminum strip
middot middot middotmiddot middot middot
middot middot middotmiddot middot middot
hd
Pt1 Pt1 Pt1
Pt2 Pt2
Figure 1 Aluminum strip and air bars in air flotation oven
Figure 2 The single nozzle and the floating aluminum strip
to the lower nozzle is adjusted by the blowerrsquos rotating speedFurthermore the changes of the blowerrsquos rotating speed caninfluence the pressure of the lower nozzle 119875
1199051and that of the
upper nozzle 1198751199052
During the air flotation process flotation height is animportant variable which is defined as the distance betweenthe rigid web and lower nozzles If the floating strips areclose to the upper or lower nozzles strip scratch may occurwhichmay cause the product to abandonTherefore flotationheight should be controlled in a proper position in order toguarantee sufficient margin between the upper nozzles andlower nozzles After theoretical analysis the flotation height isdetermined by various parameters such as air density densityof the aluminum alloy strip thickness upper nozzle pressure1198751199051 and lower nozzle pressure 119875
1199052
22 Mechanism Model of Flotation Height Generally alu-minum strip has strong hardness When the aluminum stripis floating in the air the deflection of aluminum strip is smallwhich can be seen in Figure 2Therefore in the developmentof the proposedmechanismmodel the aluminum strip shapeis considered as straight in the horizontal direction Basedon the above consideration ground effect theory is appliedin this study which is proven to be useful for describing theaerodynamic characteristics of pressure-pad air bars in airflotation oven [1 3 5 6]
The ground effect theories are worked under the follow-ing assumption [3]
(1) the thickness of jet flow is much smaller than theflotation height (119887ℎ ≪ 1) and does not change alongthe path of the jet
(2) the flow profile across the jet is uniform
(3) the jet speed does not change along the path of the jet
(4) the path of the jet flow has a constant curvature andis tangent to the ground
(5) the pressure in the region surrounded by the twostreams of air jet is constant
On the basis of ground effect theories the vertical forcebalance for the air jet requires
1205881198871198812
119895(1 + cos 120579) = 119875
119888lowast ℎ (1)
where 120588 is the air density 119887 is the slit nozzlersquos width 119881119895is the
air velocity and 119875119888is the cushion pressure (gage pressure)
The effective total pressure (gage pressure) of the air jet afterthe nozzle is
119901119895
=119875119888
2+
1205881198812
119895
2 (2)
where the static pressure is assumed to be the average of theambient pressure and the cushion pressure because these twopressures are acting on the two sides of the air jet nozzleSubstituting (1) into (2) the pressure ratio is as follows
119875119888
119875119905
=2 (1 + cos 120579)
ℎ119887 + 1 + cos 120579 (3)
The lift force per unit length of air bar is
119865 = 119875119888119908 + 2120588119887119881
2
119905sin 120579 (4)
where 119908 is the distance between the two slot nozzlesThe lastterm in (4) is the momentum change of two air jets in thevertical direction By eliminating 119875
119888and 120588119887119881
2
119905from (4) using
(1) and (3) the equation is as follows
119865 =119875119888
119875119905
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 119875119905lowast 119887 (5)
The lower floatation force 1198651 is
1198651 =1198751198881
1198751199051
lowast (119908
119887+
ℎ
119887
2 sin 120579
1 + cos 120579) 1198991
lowast 1198751199051
lowast 119887 (6)
where ℎ119889is the distance between the bottom surface of upper
nozzles and the top surface of lower nozzles (seen in Figure 1)and 119899
1is the number of lower nozzles The upper floatation
nozzlersquos flotation is ℎ119889
minus ℎ The upper nozzles force 1198652 is
1198652 =1198751198882
1198751199052
lowast (119908
119887+
ℎ119889
minus ℎ
119887
2 sin 120579
1 + cos 120579) 1198992
lowast 1198751199052
lowast 119887 (7)
where 1198992is the number of upper nozzles The strip will float
at a height where the combination of the aluminum striprsquosweight and the air force due to the upper nozzle just balancesthe upward force due to the lower nozzles [5] Consider
1198651 minus 1198652 = 119866 (8)
4 Mathematical Problems in Engineering
where1198651 is lower floatation force1198652 is upper floatation forceand 119866 is the weight of the strip Substituting (6) and (7) into(8) (9) is as follows
[4119887 sin 120579 (11989911198751199051
minus 11989921198751199052
) minus 119866] ℎ2
+ [ℎ119889119866 minus 4ℎ
119889119887 sin 120579 (119899
11198751199051
minus 11989921198751199052
) + 2119887 (1 + cos) 120579]
times (11989911198751199051
+ 11989921198751199052
) (119908 minus 2119887) sin 120579ℎ + 119887 (1 + cos 120579)
times ℎ119889119866 + 119887 (1 + cos 120579) [119866 minus 2119908 (119899
11198751199051
minus 11989921198751199052
)]
minus 2ℎ11988911990811989911198751199051
+ 4ℎ119889119887 sin 120579119899
21198751199052
= 0
(9)
The flotation height ℎ can be solved from (9)
3 Selective Bagging EnsembleUsing NCL and GA
In this study LSSVR is used as the base learning algorithmThemain contribution of current study focuses on the design-ing of ensemble method while LSSVR is directly used with-out modification Therefore LSSVR will not be introducedand the details of it can be founded in [28 29]
In the following the basic principle of bagging and NCLis firstly introduced Thereafter a selective bagging ensemblewill be proposed
31 The Basic Idea of Bagging For bagging algorithm eachtraining subset contains 119899 learning samples which is drawnrandomly with replacement from the original training set ofsize119873 Such a training subset is called a bootstrap replicate ofthe original set Instead of making predictions from a singlemodel that is fitted to the observed data a number of predic-tions models are developed to predict the relationship bet-ween input and output variables Each model is developedfrom the multiple models which are combined to improvemodel accuracy and robustness [21 22]
Let 119879 = (119909119901 119910119901 119901 = 1 119873) denote a regression type
training set and the SVM algorithm uses 119879 to construct aregression predictor 119865
119877(119909 119879) to predict 119910 values Let 119865 be a
bagging ensemble algorithm obtained as a simple averagingcombination of 119872 predictors that is
119865 (119909119901) =
1
119872
119872
sum
119894=1
119891119894(119909119901) (10)
where 119872 is the number of the individual SVM in the ensem-ble algorithm 119891
119894(119909119901) is the output of SVM 119894 on the data set
and 119865(119909119901) is the output of the ensemble algorithm on the
data set
32 The Basic Idea of NCL NCL implicitly creates differenttraining sets by encouraging different individual models tolearn different parts or aspects of the training data so that all
networks can be trained simultaneously and interactively onthe same training data set 119879 [29 30] as follows
119862119894= (119891119894(119909119901) minus 119865 (119909
119901))
times sum
119895 = 1
(119891119894(119909119901) minus 119865 (119909
119901)) = minus (119891
119894(119909119901) minus 119865 (119909
119901))2
(11)
The error function 119864119894for SVR 119894 in negative correlation learn-
ing is defined as
119864119894=
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (12)
The parameter 0 le 120582 le 1 is used to adjust the strength ofthe penaltyThe simple averaging of the ensemble in negativecorrelation learning is defined as
119864119894=
1
119872
119872
sum
119894=1
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (13)
33 Selective Bagging Using NCL In bagging ensemble algo-rithm the accuracy of the individual model is not wellcontrolled If there are some uncorrected individual modelswith large bias the overall prediction performance of theensemble model may deteriorate Therefore the accuracy ofthe individual model is managed in this paperThe individualmodel with undesirable precision is retrained until its desiredaccuracy is obtained
Moreover the individual models in the original baggingensemble are trained independently There is insufficientcooperation between them which may worse the overallprediction performance Furthermore the original baggingensemble is inefficient due to its relatively large ensemble sizeIn order to address above two problems NCL algorithm isintroduced to bagging ensemble algorithm so the coopera-tion between individual models can be improved By virtueof NCL the individual models cooperated with each other inthe original bagging ensemble and the redundant individualmodels with no contribution to prediction accuracy can bepruned from original bagging ensemble
Bymodification ofNCL the error function119864119894for 119894th indi-
vidual model in selective bagging is as follows
119864119894= 119908119894sdot
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (14)
Similar to NCL the parameter 0 le 120582 le 1 is used to adjustthe strength of the penalty The simple average of selectivebagging is shown as follows
119864 =
119872
sum
119894=1
119908119894
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894))
subject to sum
119894
119908119894= 1 0 le 119908
119894le 05 119894 = 2 3 119872
(15)
Then the remaining problem is the determination of theweight 119908
119894 which will be described in the following section
Mathematical Problems in Engineering 5
Input variablesFloatation process Online tested by laboratory
Mechanism model
Error compensationmodel
The floatationheight predictedby hybrid model
+
+
+
minus
Figure 3 Hybrid model structure
34 Solving the Selective Bagging Ensemble Problem UsingGenetic Algorithm In our proposed algorithm genetic algo-rithm is used to solve the optimization problem (15)Theopti-mal subset is selected from the pool of the ensemble algo-rithms
In genetic algorithm the chromosomes are representedby a binary string of length 119870 times 119899 in which 119870 is fixed inalgorithm main Individual algorithm is encoded in a binarylength of size 119899 To illustrate this point the individual SVRalgorithms are encoded as follows (in1 = 0000 in2 = 0001
inGA119901 = 1111) and the chromosomes are encoded as fol-lows (ch1 = 00000000 ch2 = 001011 chGA119901 = 111001)
In the chromosomes of existing population individualsare repeatedly selected for breeding until the new populationis saturated The fitness proportionate selection of roulette-wheel is applied to this proposed algorithm and the fitnessfunction is (15) The chromosomes will be selected crossedover and mutated in the optimal process In the selectingprocess the standard elitism approach is adopted so the evo-lution process can become more stable and converges earlierDuring the crossover and mutation processes the single-point crossover method and flip-flop single-point mutationis applied Generally the average fitness function will beimproved according to the genetic operators of crossoverandmutationHowever undesired chromosomesmay appearrepeatedly in the process For example in the two chromo-somes (110100 100110) 119899 = 3 and 119870 = 2 if single point cross-over point occurs the new spring will be (110110 100100)Similarly given a chromosome 111101 if mutation happensat the second point the new offspring will be 111111 Undersuch circumstances the chromosomes are treated as badindividuals for evolution
In our method the optimization problem (15) is solvedin a sequential wayThe ensemble size increases progressivelyand the ensemble size is finally confined by a simple approachSpecifically genetic algorithm is firstly used to solve the opti-mization problem (15) with a fixed ensemble size 2Thereforeit can select two individual models from a pool of individualmodels to compose an ensemble model 119864
2 Similarly an
ensemble model 1198643with three individual models can then be
establishedThereafter comparison is carried out between 1198642
and 1198643 If the value of objective function of 119864
3is smaller than
1198642 the algorithm is expanded to find the best ensemble with
four individual models and so on The algorithm convergesand the increment of ensemble size stops when the value
of objective function corresponding to the ensemble modelincreases It can be concluded that the minimum ensembleerror and the optimal ensemble size can be obtained by thisensemble way In each iteration it can be found that geneticalgorithm (GA) is used to search for the best ensemble size 119870
thatminimizes the fitness function (15)The selection processis explained in main algorithm
The hybrid selective ensemble process is as follows
Algorithm Main
Step 1 Generate training subset 119879119894from 119879 by bootstrap sam-
pling algorithm Train an individual model 119891119894on the training
subset 119879119894by SVM algorithm
Step 2 Calculate the training error 119864119894of 119891119894by (14) If 119864
119894gt 1198901
repeat Step 1 otherwise if 119894 = 119894 + 1 build SVMmodel 119891119894with
119879119894
Step 3 119870 = 2
Step 4 Find the best ensemble individual models of 119870 and119870 + 1 models by GA
Step 5 If the 119891119894is selected in Step 4 then 119908
119894= 1119870
otherwise 119908119894= 0
Step 6 Evaluate ensemble error En119870and En
119870+1on validation
set 119863V by (15) Evaluate En119870+1 on 119863V
Step 7 If En119870
gt En119870+1
and 119870 = 119870 + 1 repeat Step 4otherwise go to Step 8
Step 8 Output 119865(119909119901) = (1119870) sum
119870
119894=1119891119894(119909119901)
4 Hybrid Model Based on Selective BaggingEnsemble Method
In this paper a hybrid flotation height prediction model isdeveloped which is made up of mechanism model and datamodel The data model is a new method based on selectivebagging ensemble and it is used as the error compensationmodel of hybrid model The structure of the hybrid modelis shown in Figure 3 Based on the mechanism analysisthe input variables of the hybrid model are determined air
6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
where1198651 is lower floatation force1198652 is upper floatation forceand 119866 is the weight of the strip Substituting (6) and (7) into(8) (9) is as follows
[4119887 sin 120579 (11989911198751199051
minus 11989921198751199052
) minus 119866] ℎ2
+ [ℎ119889119866 minus 4ℎ
119889119887 sin 120579 (119899
11198751199051
minus 11989921198751199052
) + 2119887 (1 + cos) 120579]
times (11989911198751199051
+ 11989921198751199052
) (119908 minus 2119887) sin 120579ℎ + 119887 (1 + cos 120579)
times ℎ119889119866 + 119887 (1 + cos 120579) [119866 minus 2119908 (119899
11198751199051
minus 11989921198751199052
)]
minus 2ℎ11988911990811989911198751199051
+ 4ℎ119889119887 sin 120579119899
21198751199052
= 0
(9)
The flotation height ℎ can be solved from (9)
3 Selective Bagging EnsembleUsing NCL and GA
In this study LSSVR is used as the base learning algorithmThemain contribution of current study focuses on the design-ing of ensemble method while LSSVR is directly used with-out modification Therefore LSSVR will not be introducedand the details of it can be founded in [28 29]
In the following the basic principle of bagging and NCLis firstly introduced Thereafter a selective bagging ensemblewill be proposed
31 The Basic Idea of Bagging For bagging algorithm eachtraining subset contains 119899 learning samples which is drawnrandomly with replacement from the original training set ofsize119873 Such a training subset is called a bootstrap replicate ofthe original set Instead of making predictions from a singlemodel that is fitted to the observed data a number of predic-tions models are developed to predict the relationship bet-ween input and output variables Each model is developedfrom the multiple models which are combined to improvemodel accuracy and robustness [21 22]
Let 119879 = (119909119901 119910119901 119901 = 1 119873) denote a regression type
training set and the SVM algorithm uses 119879 to construct aregression predictor 119865
119877(119909 119879) to predict 119910 values Let 119865 be a
bagging ensemble algorithm obtained as a simple averagingcombination of 119872 predictors that is
119865 (119909119901) =
1
119872
119872
sum
119894=1
119891119894(119909119901) (10)
where 119872 is the number of the individual SVM in the ensem-ble algorithm 119891
119894(119909119901) is the output of SVM 119894 on the data set
and 119865(119909119901) is the output of the ensemble algorithm on the
data set
32 The Basic Idea of NCL NCL implicitly creates differenttraining sets by encouraging different individual models tolearn different parts or aspects of the training data so that all
networks can be trained simultaneously and interactively onthe same training data set 119879 [29 30] as follows
119862119894= (119891119894(119909119901) minus 119865 (119909
119901))
times sum
119895 = 1
(119891119894(119909119901) minus 119865 (119909
119901)) = minus (119891
119894(119909119901) minus 119865 (119909
119901))2
(11)
The error function 119864119894for SVR 119894 in negative correlation learn-
ing is defined as
119864119894=
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (12)
The parameter 0 le 120582 le 1 is used to adjust the strength ofthe penaltyThe simple averaging of the ensemble in negativecorrelation learning is defined as
119864119894=
1
119872
119872
sum
119894=1
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (13)
33 Selective Bagging Using NCL In bagging ensemble algo-rithm the accuracy of the individual model is not wellcontrolled If there are some uncorrected individual modelswith large bias the overall prediction performance of theensemble model may deteriorate Therefore the accuracy ofthe individual model is managed in this paperThe individualmodel with undesirable precision is retrained until its desiredaccuracy is obtained
Moreover the individual models in the original baggingensemble are trained independently There is insufficientcooperation between them which may worse the overallprediction performance Furthermore the original baggingensemble is inefficient due to its relatively large ensemble sizeIn order to address above two problems NCL algorithm isintroduced to bagging ensemble algorithm so the coopera-tion between individual models can be improved By virtueof NCL the individual models cooperated with each other inthe original bagging ensemble and the redundant individualmodels with no contribution to prediction accuracy can bepruned from original bagging ensemble
Bymodification ofNCL the error function119864119894for 119894th indi-
vidual model in selective bagging is as follows
119864119894= 119908119894sdot
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894)) (14)
Similar to NCL the parameter 0 le 120582 le 1 is used to adjustthe strength of the penalty The simple average of selectivebagging is shown as follows
119864 =
119872
sum
119894=1
119908119894
119873
sum
119901=1
(1
2(119891119894(119909119901) minus 119865(119909
119901)2
+ 120582119862119894))
subject to sum
119894
119908119894= 1 0 le 119908
119894le 05 119894 = 2 3 119872
(15)
Then the remaining problem is the determination of theweight 119908
119894 which will be described in the following section
Mathematical Problems in Engineering 5
Input variablesFloatation process Online tested by laboratory
Mechanism model
Error compensationmodel
The floatationheight predictedby hybrid model
+
+
+
minus
Figure 3 Hybrid model structure
34 Solving the Selective Bagging Ensemble Problem UsingGenetic Algorithm In our proposed algorithm genetic algo-rithm is used to solve the optimization problem (15)Theopti-mal subset is selected from the pool of the ensemble algo-rithms
In genetic algorithm the chromosomes are representedby a binary string of length 119870 times 119899 in which 119870 is fixed inalgorithm main Individual algorithm is encoded in a binarylength of size 119899 To illustrate this point the individual SVRalgorithms are encoded as follows (in1 = 0000 in2 = 0001
inGA119901 = 1111) and the chromosomes are encoded as fol-lows (ch1 = 00000000 ch2 = 001011 chGA119901 = 111001)
In the chromosomes of existing population individualsare repeatedly selected for breeding until the new populationis saturated The fitness proportionate selection of roulette-wheel is applied to this proposed algorithm and the fitnessfunction is (15) The chromosomes will be selected crossedover and mutated in the optimal process In the selectingprocess the standard elitism approach is adopted so the evo-lution process can become more stable and converges earlierDuring the crossover and mutation processes the single-point crossover method and flip-flop single-point mutationis applied Generally the average fitness function will beimproved according to the genetic operators of crossoverandmutationHowever undesired chromosomesmay appearrepeatedly in the process For example in the two chromo-somes (110100 100110) 119899 = 3 and 119870 = 2 if single point cross-over point occurs the new spring will be (110110 100100)Similarly given a chromosome 111101 if mutation happensat the second point the new offspring will be 111111 Undersuch circumstances the chromosomes are treated as badindividuals for evolution
In our method the optimization problem (15) is solvedin a sequential wayThe ensemble size increases progressivelyand the ensemble size is finally confined by a simple approachSpecifically genetic algorithm is firstly used to solve the opti-mization problem (15) with a fixed ensemble size 2Thereforeit can select two individual models from a pool of individualmodels to compose an ensemble model 119864
2 Similarly an
ensemble model 1198643with three individual models can then be
establishedThereafter comparison is carried out between 1198642
and 1198643 If the value of objective function of 119864
3is smaller than
1198642 the algorithm is expanded to find the best ensemble with
four individual models and so on The algorithm convergesand the increment of ensemble size stops when the value
of objective function corresponding to the ensemble modelincreases It can be concluded that the minimum ensembleerror and the optimal ensemble size can be obtained by thisensemble way In each iteration it can be found that geneticalgorithm (GA) is used to search for the best ensemble size 119870
thatminimizes the fitness function (15)The selection processis explained in main algorithm
The hybrid selective ensemble process is as follows
Algorithm Main
Step 1 Generate training subset 119879119894from 119879 by bootstrap sam-
pling algorithm Train an individual model 119891119894on the training
subset 119879119894by SVM algorithm
Step 2 Calculate the training error 119864119894of 119891119894by (14) If 119864
119894gt 1198901
repeat Step 1 otherwise if 119894 = 119894 + 1 build SVMmodel 119891119894with
119879119894
Step 3 119870 = 2
Step 4 Find the best ensemble individual models of 119870 and119870 + 1 models by GA
Step 5 If the 119891119894is selected in Step 4 then 119908
119894= 1119870
otherwise 119908119894= 0
Step 6 Evaluate ensemble error En119870and En
119870+1on validation
set 119863V by (15) Evaluate En119870+1 on 119863V
Step 7 If En119870
gt En119870+1
and 119870 = 119870 + 1 repeat Step 4otherwise go to Step 8
Step 8 Output 119865(119909119901) = (1119870) sum
119870
119894=1119891119894(119909119901)
4 Hybrid Model Based on Selective BaggingEnsemble Method
In this paper a hybrid flotation height prediction model isdeveloped which is made up of mechanism model and datamodel The data model is a new method based on selectivebagging ensemble and it is used as the error compensationmodel of hybrid model The structure of the hybrid modelis shown in Figure 3 Based on the mechanism analysisthe input variables of the hybrid model are determined air
6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Input variablesFloatation process Online tested by laboratory
Mechanism model
Error compensationmodel
The floatationheight predictedby hybrid model
+
+
+
minus
Figure 3 Hybrid model structure
34 Solving the Selective Bagging Ensemble Problem UsingGenetic Algorithm In our proposed algorithm genetic algo-rithm is used to solve the optimization problem (15)Theopti-mal subset is selected from the pool of the ensemble algo-rithms
In genetic algorithm the chromosomes are representedby a binary string of length 119870 times 119899 in which 119870 is fixed inalgorithm main Individual algorithm is encoded in a binarylength of size 119899 To illustrate this point the individual SVRalgorithms are encoded as follows (in1 = 0000 in2 = 0001
inGA119901 = 1111) and the chromosomes are encoded as fol-lows (ch1 = 00000000 ch2 = 001011 chGA119901 = 111001)
In the chromosomes of existing population individualsare repeatedly selected for breeding until the new populationis saturated The fitness proportionate selection of roulette-wheel is applied to this proposed algorithm and the fitnessfunction is (15) The chromosomes will be selected crossedover and mutated in the optimal process In the selectingprocess the standard elitism approach is adopted so the evo-lution process can become more stable and converges earlierDuring the crossover and mutation processes the single-point crossover method and flip-flop single-point mutationis applied Generally the average fitness function will beimproved according to the genetic operators of crossoverandmutationHowever undesired chromosomesmay appearrepeatedly in the process For example in the two chromo-somes (110100 100110) 119899 = 3 and 119870 = 2 if single point cross-over point occurs the new spring will be (110110 100100)Similarly given a chromosome 111101 if mutation happensat the second point the new offspring will be 111111 Undersuch circumstances the chromosomes are treated as badindividuals for evolution
In our method the optimization problem (15) is solvedin a sequential wayThe ensemble size increases progressivelyand the ensemble size is finally confined by a simple approachSpecifically genetic algorithm is firstly used to solve the opti-mization problem (15) with a fixed ensemble size 2Thereforeit can select two individual models from a pool of individualmodels to compose an ensemble model 119864
2 Similarly an
ensemble model 1198643with three individual models can then be
establishedThereafter comparison is carried out between 1198642
and 1198643 If the value of objective function of 119864
3is smaller than
1198642 the algorithm is expanded to find the best ensemble with
four individual models and so on The algorithm convergesand the increment of ensemble size stops when the value
of objective function corresponding to the ensemble modelincreases It can be concluded that the minimum ensembleerror and the optimal ensemble size can be obtained by thisensemble way In each iteration it can be found that geneticalgorithm (GA) is used to search for the best ensemble size 119870
thatminimizes the fitness function (15)The selection processis explained in main algorithm
The hybrid selective ensemble process is as follows
Algorithm Main
Step 1 Generate training subset 119879119894from 119879 by bootstrap sam-
pling algorithm Train an individual model 119891119894on the training
subset 119879119894by SVM algorithm
Step 2 Calculate the training error 119864119894of 119891119894by (14) If 119864
119894gt 1198901
repeat Step 1 otherwise if 119894 = 119894 + 1 build SVMmodel 119891119894with
119879119894
Step 3 119870 = 2
Step 4 Find the best ensemble individual models of 119870 and119870 + 1 models by GA
Step 5 If the 119891119894is selected in Step 4 then 119908
119894= 1119870
otherwise 119908119894= 0
Step 6 Evaluate ensemble error En119870and En
119870+1on validation
set 119863V by (15) Evaluate En119870+1 on 119863V
Step 7 If En119870
gt En119870+1
and 119870 = 119870 + 1 repeat Step 4otherwise go to Step 8
Step 8 Output 119865(119909119901) = (1119870) sum
119870
119894=1119891119894(119909119901)
4 Hybrid Model Based on Selective BaggingEnsemble Method
In this paper a hybrid flotation height prediction model isdeveloped which is made up of mechanism model and datamodel The data model is a new method based on selectivebagging ensemble and it is used as the error compensationmodel of hybrid model The structure of the hybrid modelis shown in Figure 3 Based on the mechanism analysisthe input variables of the hybrid model are determined air
6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Upper fan
Pressure sensorAir flotation oven
Lower fan Inverter
Figure 4 The diagram of air flotation system
density the upper nozzlersquos pressure the lower nozzlersquos pres-sure the strip thickness and aluminum strip density Theflotation height in air flotation oven is predicted based on thehybrid model
In the hybrid model the error compensation model isused to compensate the flotation height modeling error ofmechanism model As a result the prediction error of mech-anism model can be well compensated
5 Practical Application and Experiments
The proposed flotation height prediction model is validatedon an experimental equipment which is located in The StateKey laboratory of Rolling and Automation in NortheasternUniversity A set of experimental data collected from thisexperimental air flotation oven The experimental air flota-tion oven can be seen in Figure 4
From Figure 4 the air flotation oven system consists oflower fan upper fan two inverters pressure sensor and soforth The size of the air flotation system is 3 times 3 times 22mTheinverter is SIEMENS MM440 The pressure sensor is U-tubewhose range is 0ndash2000 Pa and resolution is 10 Pa The uppernozzle pressure and lower nozzle pressure aremeasured byU-tubes A Leica hand-hold distance finder is used to measurethe flotation height The range and resolution of hand-holddistance finder are 50m and 1mm respectively The hand-hold distance finder is just used for convenient measurementunder experimental conditions and it does not exist in indus-try process
The inner flow guide structure of air flotation oven isshown in Figure 5The air flotation oven consists of upper aircontainer lower air container upper nozzles lower nozzlesand so forth
In air flotation oven the speeds of upper and lower fanare respectively controlled by a variable-frequency inverterrespectively (AC drive) The air successively flows throughfans air containers and nozzles and finally is ejected to thesurface of aluminum strip
The upper and lower jet speeds are adjusted by fans Alu-minum strip floats on a fixed height under different speed
Upper fan
Lower fan
Flow guide structure
Upper air container
Floating aluminum strip
Lower air container
middot middot middotmiddot middot middot
middot middot middot middot middot middotPt1
Pt1Pt1
Pt2Pt2
Figure 5 The inner flow guide structure of air flotation device
ratio of upper fan and lower fan Under experimental con-ditions the ranges of jet speeds and mach numbers are 0ndash25ms and 0ndash00735 (incompressible fluid) The mechanicalstructure let fluid flow along the length direction of experi-ment equipment so two-dimensional air flow is considered
In our experiment the width of aluminum strip is300mm The thickness of the strip varies from 04mm to2mm at the interval of 02mm Finally 850 samples thatcover various working conditions are collected for trainingthe hybrid model Additionally 32 samples that specified to 4given working conditions are collected for testing the hybridmodel and process analysis
In practical experiment there is measuring error in pro-cess data because of the instrumentation precision and inter-fering signalWith the deviation of process data the accuracyof the model will be degraded The abnormal data shouldbe eliminated The statistics discriminant method of Pautacriteria is applied in the experimentThe principle of Pauta isas follows sample data set is 119883 = 119909
1 1199092 119909
119899 and 119883 is the
average value Deviation value is V119894= 119909119894minus 119883 (119894 = 1 2 119899)
The standard deviation is calculated according to Bayesianformula as follows
120590 = radic
119899
sum
119894=1
[V2119894
(119899 minus 1)] (16)
If the sample data 1199091015840
119894deviation value is |V
119894| ge 3120590 the sample
data should be eliminatedComprising the hybrid selective bagging ensemblemodel
(SBEH) single SVM hybrid model (SVMH) basic bagginghybrid model (BBH) and mechanism model (MM) are alsoapplied to this experiment There are eight parameters thatshould be tuned in our selective ensemblemethod SEH (GA
119892
GA119901 GA119888 GA119898 base learner size individual error limit value
1198901 and 120582) three parameters for BBH (1205902 and 120574 for base
learner and ensemble size) two parameters for SVMH (1205902and 120574) The base learner size of our proposed method andBBH ensemble have been set to 128
In SBEH model maximum number of generations GA119892
population size GA119901 crossover rate GA
119888 the mutation rate
GA119898of the genetic algorithm individual error control 119890
1 and
the penalty parameter120582have been fixed to 200 128 075 002
Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
25
20
15
10
5
0
40 60 80 100 120 140 160
BBHrsquos prediction valueMMrsquos prediction valueSVRHrsquos prediction value
SBEHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(a) Thickness = 1mm upper pressure = 0 Pa
30
25
20
15
10
5
0
0 50 100 150 200
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(b) Thickness = 1mm upper pressure = 65 Pa
35
30
25
20
15
10
5
0
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction valueBBHrsquos prediction value
SVRHrsquos prediction valueActual value
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(c) Thickness = 2mm upper pressure = 0 Pa
150 200 250 300 350
SBEHrsquos prediction valueMMrsquos prediction value
BBHrsquos prediction value
SVRHrsquos prediction valueActual value
30
25
20
15
10
5
0
Flot
atio
n he
ight
(mm
)
Lower nozzles pressure (Pa)
(d) Thickness = 2mm upper pressure = 65 Pa
Figure 6 The prediction and actual flotation height under different work condition
10 and 04 respectively The bootstrap sampling size of BBHhave been fixed to roughly 60of the training set Parameters1205902 and 120574 of single SVM hybrid model and BBH model has
been fixed to 4 and 212Different information about the predictive capacity of the
model can bemeasured through RMSE andMAETheRMSEand MAE are defined as
RMSE = radic1
119873
119873
sum
119894=1
(119884119894observed
minus 119884119894estimate
)2
MAE =1
119873
119873
sum
119894=1
10038161003816100381610038161003816119884119894observed
minus 119884119894estimate
10038161003816100381610038161003816
(17)
where 119873 is the number of individual models and 119884119894is the
flotation heightThe experiment is carried on an experimental air flotation
oven In Figure 6 thickness of the aluminum strip is 1mmand 2mm The width of the aluminum strip is 300mm Theflotation height is tested under different lower nozzle pressure1198751199051and upper nozzle pressure 119875
1199052 The prediction value and
actual value of flotation height are shown in Figure 6Figure 6 shows the predicted flotation height based on the
proposed hybrid selective bagging ensemble method Hybridselective bagging ensemble model has better generalizationability and is precise than other models Table 1 shows RMSEand MAE of SBEH SVMH MM and BBH model
From Table 1 it can be concluded that our proposedapproach SBEH outperforms the other three algorithms
8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 1 Comparison of four models
Model RMSE MAEMM 907 757963BBH 20503 1559259SVMH 23868 1988889SBEH 1195385 0903704
According to the above experimental results the appli-cation of hybrid method SBEH can bring improvements asshown in Figure 5 andTable 1These results reveal that hybridensemble method is the more dominated than the mecha-nism algorithm The possible reason may be that fluid inter-action that exists between different nozzles and the fluidinteraction is not well described by mechanism model whilethe hybrid ensemble method is able to learn the fluid inter-action process by its data model part that possesses goodself-learning ability The other possible reason may be thatthese assumptions in mechanism model and other unknownfactors in process are learned by date model part of hybridensemble method Furthermore it can be found from thecomparison result that the proposed hybrid model outper-forms the single SVR hybrid model and basic bagging hybridmodel Therefore it can be concluded that the proposedhybrid method is able to further improve the predictionperformance in the prediction of flotation height
6 Conclusions
In this paper a mathematical mechanism model of flotationheight in air flotation oven is firstly developed Thereafter ahybrid model is designed by the proposed selective baggingensemble method This proposed model can compensate theerror of the mechanism model The proposed hybrid modelcan combine the well generalization performance of mecha-nism modeling method and the excellent learning ability ofmachine learning algorithms Thereby better flotation heightprediction performance can be obtained The simulationresults show that the proposed hybrid selective baggingensemblemodel does consistently improve the predicted pre-cision versus MMmodel BBHmodel and SVMHmodel forflotation height In summary the proposed hybrid modelingalgorithmhas a good potential in the actual air flotation oven
Acknowledgments
Theauthors gratefully acknowledge supports provided by Sci-ence and Technology Projects in Liaoning Province L2013113and the Fundamental Research Funds for the Central Univer-sities of China under Project N110604011
References
[1] H-K Cho Flow-Induced Vibration of A Web Floating Over aPressure-Pad Air Bar Oklahoma State University 2005
[2] H Cho An Alytical and Computational Study of the Asymmetryof Webs Pass Gover Konkuk University 1997
[3] M J Davies and D HWood ldquoThe basic aerodynamics of flota-tionrdquo Journal of Fluids Engineering Transactions of the ASMEvol 105 no 3 pp 323ndash328 1983
[4] Y B Chang R P Swanson and P M Moretti ldquoResiliency of anair-floated webrdquo in Proceedings of the 5th International Confer-ence on Web Handling pp 543ndash558 1999
[5] Y B Chang R P Swanson andPMMoretti ldquoLongitudinal andout-of-plane stiffness of a web in an air-flotation ovenrdquo in Pro-ceedings of the ASME International Mechanical EngineeringCongress and Exposition (IMECE rsquo99) pp 435ndash443 November1999
[6] P M Moretti ldquoLateral deflections of Webs in air-flotationovensrdquo Journal of Applied Mechanics Transactions ASME vol71 no 3 pp 314ndash320 2004
[7] H Cho Pressure-PadAir Bars Oklahoma State University 1999[8] M Wu and Y Zhao ldquoKnowledge-based approach to assembly
sequence planning for wind-driven generatorrdquo MathematicalProblems in Engineering vol 2013 Article ID 908316 7 pages2013
[9] M Stepnicka P Cortez J Peralta Donate and L StepnickovaldquoForecasting seasonal time series with computational intelli-gence on recent methods and the potential of their combina-tionsrdquo Expert Systems with Applications vol 40 no 6 pp 1981ndash1992 2013
[10] Y-J Lee and S-Y Huang ldquoReduced support vector machinesa statistical theoryrdquo IEEE Transactions on Neural Networks vol18 no 1 pp 1ndash13 2007
[11] C Chen J Xia J Liu and G Feng ldquoNonlinear inversion ofpotential-field data using a hybrid-encoding genetic algorithmrdquoComputers amp Geosciences vol 32 no 2 pp 230ndash239 2006
[12] S-Z Gao J-S Wang and N Zhao ldquoFault diagnosis method ofpolymerization Kettle equipment based on rough sets and BPneural networkrdquo Mathematical Problems in Engineering vol2013 Article ID 768018 12 pages 2013
[13] R Stoean and C Stoean ldquoModeling medical decision makingby support vector machines explaining by rules of evolutionaryalgorithms with feature selectionrdquo Expert Systems with Applica-tions vol 40 no 7 pp 2677ndash2686 2013
[14] D Wang and M Alhamdoosh ldquoEvolutionary extreme learningmachine ensembles with size controlrdquoNeurocomputing vol 102pp 98ndash110 2013
[15] S-W Fei and Y Sun ldquoForecasting dissolved gases content inpower transformer oil based on support vector machine withgenetic algorithmrdquo Electric Power Systems Research vol 78 no3 pp 507ndash514 2008
[16] W Chu and Z Ghahramani ldquoGaussian processes for ordinalregressionrdquo Journal of Machine Learning Research vol 6 pp1019ndash1041 2005
[17] M C Kennedy and A OrsquoHagan ldquoBayesian calibration ofcomputer modelsrdquo Journal of the Royal Statistical Society B vol63 no 3 pp 425ndash464 2001
[18] C E Rasmussen and C K I Williams Gaussian Processes forMachine Learning Adaptive Computation and Machine Learn-ing MIT Press Cambridge Mass USA 2006
[19] D Hernandez-Lobato G Martınez-Munoz and A SuarezldquoEmpirical analysis and evaluation of approximate techniquesfor pruning regression bagging ensemblesrdquo Neurocomputingvol 74 no 12-13 pp 2250ndash2264 2011
[20] Z-H Zhou J Wu andW Tang ldquoEnsembling neural networksmany could be better than allrdquoArtificial Intelligence vol 137 no1-2 pp 239ndash263 2002
Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[21] T Chen and J Ren ldquoBagging for Gaussian process regressionrdquoNeurocomputing vol 72 no 7ndash9 pp 1605ndash1610 2009
[22] K Wang T Chen and R Lau ldquoBagging for robust non-linearmultivariate calibration of spectroscopyrdquo Chemometrics andIntelligent Laboratory Systems vol 105 no 1 pp 1ndash6 2011
[23] L Breiman ldquoBagging predictorsrdquoMachine Learning vol 24 no2 pp 123ndash140 1996
[24] M Behzad K Asghari M Eazi and M Palhang ldquoGeneraliza-tion performance ofsupport vector machines and neural net-works in runoff modelingrdquo Expert Systems with Applicationsvol 36 no 4 pp 7624ndash7629 2009
[25] X Yao and Y Liu ldquoMaking use of population information inevolutionary artificial neural networksrdquo IEEE Transactions onSystems Man and Cybernetics B vol 28 no 3 pp 417ndash4251998
[26] Y Liu and X Yao ldquoSimultaneous training of negatively corre-lated neural networks in an ensemblerdquo IEEE Transactions onSystems Man and Cybernetics B vol 29 no 6 pp 716ndash7251999
[27] S Masoudnia R Ebrahimpour and S A A Abbaszadeh Ara-nib ldquoCombining features of negative correlation learning withmixture of experts in proposed ensemblemethodsrdquoApplied SoftComputing vol 12 no 11 pp 3539ndash3551 2012
[28] S Ismail A Shabri and R Samsudin ldquoA hybrid model ofself-organizing maps (SOM) and least square support vectormachine (LSSVM) for time-series forecastingrdquo Expert Systemswith Applications vol 38 no 8 pp 10574ndash10578 2011
[29] S Li and L-K Dai ldquoClassification of gasoline brand and originby Raman spectroscopy and a novel R-weighted LSSVM algo-rithmrdquo Fuel vol 96 pp 146ndash152 2012
[30] G Hu Z Mao D He and F Yang ldquoHybrid modeling for theprediction of leaching rate in leaching process based onnegativecorrelation learning bagging ensemble algorithmrdquo Computersand Chemical Engineering vol 35 no 12 pp 2611ndash2617 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of