Embed Size (px)
Citation preview

Research ArticleDynamic Analysis of a Phytoplankton-Fish Model withBiological and Artificial Control
Yapei Wang12 Min Zhao23 Xinhong Pan12 and Chuanjun Dai23
1 School of Mathematics and Information Science Wenzhou University Wenzhou Zhejiang 325035 China2 Zhejiang Provincial Key Laboratory for Water Environment and Marine Biological Resources ProtectionWenzhou University Wenzhou Zhejiang 325035 China
3 School of Life and Environmental Science Wenzhou University Wenzhou Zhejiang 325035 China
Correspondence should be addressed to Min Zhao zmcntomcom
Received 24 October 2013 Accepted 17 January 2014 Published 17 March 2014
Academic Editor Zhan Zhou
Copyright copy 2014 Yapei Wang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
We investigate a nonlinear model of the interaction between phytoplankton and fish which uses a pair of semicontinuous systemswith biological and artificial control First the existence of an order-1 periodic solution to the system is analyzed using a Poincaremap and a geometric method The stability conditions of the order-1 periodic solution are obtained by a theoretical mathematicalanalysis Furthermore based on previous analysis we investigate the bifurcation in the order-1 periodic solution and prove thatthe order-1 periodic solution breaks up an order-1 periodic solution at least In addition the transcritical bifurcation of the systemis described Finally we provide a series of numerical results that illustrate the feasibility of the theoretical results Based on thetheoretical and numerical results we analyzed the feasibility of biological and artificial control which showed that biologicaland artificial methods can control phytoplankton blooms These results are expected to be useful for the study of phytoplanktondynamics in aquatic ecosystems
1 Introduction
Phytoplankton plays an important role in ecology and theclimate because it participates in the global carbon cycleas the base of the food chain [1] A feature of planktonpopulations is the occurrence of rapid population explosionsand almost equally rapid declines which are separated byperiods of almost stationary high or low population levels[2] This phenomenon is known as a ldquobloomrdquo In specificenvironmental conditions lakes reservoir andmarinewatersmay experience plankton or algae blooms [3 4] For exampleeutrophication may cause blue-green algae which are verysmall plankton species with rapid rates of reproduction tobloom frequently in the Zeya Reservoir in Wenzhou whichis located in a subtropical regionThis may degrade the waterquality and could deprive millions of people of drinkingwater In particular some types of phytoplankton are rich inneurotoxins which can cause substantial mortality in fishwhile the toxins absorbed by shellfishmay cause paralysis anddeath in sea birds and humans [5] Thus it is very importantto control the growth of phytoplankton
In general physical methods (eg artificial refloata-tion and removal using machines) chemical methods (egadding chemical reagents to the water) and biological meth-ods (eg releasing natural enemies or competitors) are usedto kill phytoplankton or restrain their growth when bloomsoccur However physical methods are rarely effective in pre-venting phytoplankton blooms while chemical methodsmaycause secondary pollution Furthermore the phytoplanktoncontinues to reproduce when the concentration of chemicalreagents in the water drops to certain levels In particularwhen the chemical reagents beyond a certain level the algaeremoval rate may reach 100 within 24 h [6] It may bepossible to break the ecological balance but this is not thegoal In the present study physical and chemical methods arereferred to as artificial methods
In the food chain phytoplankton is not the top trophiclevel and some higher trophic levels such as filter-feedingfish capture and feed upon phytoplankton Thus biologicalmethods can be used to control the growth of phytoplanktonin an effective manner Liu and Xie [7] conducted in situenclosure experiments in a lake over the course of three
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2014 Article ID 914647 15 pageshttpdxdoiorg1011552014914647
2 Discrete Dynamics in Nature and Society
years and showed that intense stocking with filter-feedingfishes that is silver carp (Hypophthalmichthys molitrix) andbighead carp (Aristichthys nobilis) played a decisive role inthe elimination of blue algae blooms from the lakeThe resultsindicated that silver carp and bighead carp controlled the bluealgae blooms effectively and the effective biomass requiredto contain the blooms was determined to be 46ndash50 gm3 Inanother study [8] a mesocosm experiment was conducted toassess the impact of a moderate silver carp biomass (41 gm3
or 850 kgha) on the plankton community and the waterquality of the eutrophic Paranoa Reservoir (Brasılia Brazil)The results as well as other successful examples of blue-greencontrol using silver carp in lakes and reservoirs [9ndash11] suggestthat the use of silver carp is a promising management tool forsuppressing excess filamentous blue-green algae such as thatin Paranoa Reservoir and for controllingMicrocystis bloomsin critical areas [8]
In addition the use of biological methods can reducepollution protect the ecological balance and bring economicbenefits However the effects of biological method maybe very slow Thus we need to compare the suitability ofusing biological methods and artificial methods at the sametime The use of chemical reagents may be reduced withbiological method thereby reducing the negative effects ofchemical methods Based on previous research we used thetheory of impulsive differential equations [12ndash14] to develop aphytoplankton-fishmodel to investigate the feasibility of bio-logical and artificial methods Many researchers have studiedsome ecological systemswith impulsive differential equations[15ndash22] including the use of biological and chemical controls
In our model a logistic growth function represents thegross rate of phytoplankton production Based on previousstudies [2 23 24] a Holling type-III function representsthe interaction between the phytoplankton and the fishthat is predation of the phytoplankton Furthermore basedon the work of Wyatt and Horwood [25] Uye [26] andLevin and Segel [27] Truscott and Brindley [2] discussed therationality of using a Holling type-III function to investigatethe interaction between phytoplankton and zooplanktonWeconsider that the model is reasonable although zooplanktonis replaced by fish in our model It is known that some filter-feeding fish feed on phytoplankton so the population densityof phytoplankton can control the rate of fish production Inthis system the loss of fish occurs via death and naturalpredation by higher trophic levels in the food web Thus weassume a linear loss of fish
According to other studies [28 29] some phytoplanktonblooms may be controlled within a short period of time(lt24 h) using artificial methods In our model we assumethat the time unit is a day and the artificial and biologicalmethods are modeled using impulsive differential equationsThe model is described as follows
119889119909
119889119905
= 119903119909 (1 minus
119909
119870
) minus
1198861199092119910
119887 + 1199092
119889119910
119889119905
=
1205761198861199092119910
119887 + 1199092minus 119898119910
119909 lt ℎ
Δ119909 = minus119901119909
Δ119910 = 119902119910 + 120591119909 = ℎ
(1)
where 119909 denotes the phytoplankton population density unit120583gL 119910 denotes the fish population density unit 120583gL 119903 isthe intrinsic growth rate of phytoplankton population 119886 isthe maximum predation rate of the fish 120576 is the conversionefficiency 119870 is the carrying capacity 119887 is a half-saturationconstant and 119898 is the mortality and respiration rate of fishwhile the termΔ119909 = minus119901119909 whereΔ119909 = 119909(119905+)minus119909(119905) representsartificial control and the term Δ119910 = (1 + 119902)119910 + 120591 where Δ119910 =119910(119905
+) minus 119910(119905) represents biological control The parameters
119901 isin (0 1) represent the control levels of artificial methodsℎ gt 0 denotes the critical value of a phytoplankton bloomand 120591 ge 0 119902 gt 0 represents the release level of fish requiredto control phytoplankton and we set Δ119909 = 120572(119909 119910) = minus119901119909Δ119910 = 120573(119909 119910) = 119902119910 + 120591
The rest of this paper is organized as follows In Section 2we provide some preliminary details which are the theo-retical basis of the following investigation Next we discussthe existence of an order-1 periodic solution attractor andbifurcation in Section 3 which provides a theoretical basisfor the study of the biological method In addition somenumerical results are presented in Section 4 which illustratethe validity of the theory In the final section we discuss thefeasibility of the artificial and biological methods
2 Preliminaries
Given the following autonomous system with impulsivecontrol
119889119909
119889119905
= 119875 (119909 119910)
119889119910
119889119905
= 119876 (119909 119910) (119909 119910) notin 119873
Δ119909 = 119891 (119909 119910) Δ119910 = 119892 (119909 119910) (119909 119910) isin 119873
(2)
where 119905 isin 119877 (119909 119910) isin 1198772 and 119875119876 119891 119892 1198772rarr 119877 119873 sub 119877
2
are the set of impulses it is assumed that 119875 119876 119891 119892 are allcontinuous with respect to 119909 119910 in 1198772 so the points in119873 sub 119877
2
lie on a line For each point 119878(119909 119910) isin 119873 119868 1198772rarr 119877
2 isdefined
119868 (119878) = 119878+= (119909
+ 119910
+) isin 119877
2
119909+= 119909 + 119891 (119909 119910) 119910
+= 119910 + 119892 (119909 119910)
(3)
Let 119872 = 119868(119873) be the phase set of 119873 where 119873 cap 119872 = 120601System (2) is generally known as a semicontinuous dynamicsystem
Definition 1 Let Γ be an order-1 periodic solution of system(2) where Γ is
(1) orbitally stable if forall120576 gt 0 exist119901 isin 119873 119901 isin Γ and exist120575 gt 0such thatforall119901
1isin cup(119901 120575)120588(120587(119901
1 119905) Γ) lt 120576when 119905 gt 119905
0
(2) orbitally attractive if forall120576 gt 0 and forall1199012isin 119873 exist119879 gt 0
such that 120588(120587(1199012 119905) Γ) lt 120576 when 119905 gt 119879 + 119905
0
Discrete Dynamics in Nature and Society 3
(3) orbitally asymptotically stable if it is orbitally stableand orbitally attractive
In the present study cup(119901 120575) denotes the 120575-neighborhood ofthe point 119901 isin 119873 120588(120587(119901
1 119905) Γ) is the distance from 120587(119901
1 119905) to
Γ and 120587(1199011 119905) is the solution of system (2) that satisfies the
initial condition 120587(1199011 1199050) = 119901
1
Definition 2 The phase plane is divided into two parts basedon the trajectory of the differential equations that constitutethe order-1 cycle The section that contains the impulse lineand the trajectory is known as the inside of the order-1 cycle
Definition 3 Assuming that119872 and119873 are both straight lineswe define a new number axis 119897 on 119873 It is assumed that 119873intersects with the 119909-axis at point119876The point119876 is the originon the number axis 119897 and both the positive direction andunit length are consistent with the coordinate axis 119910 Forany point 119860 isin 119897 let 119897(119860) = 119886 be a coordinate of point 119860Furthermore supposing that the trajectory through point 119860via 119896th impulses intersects119873 at point 119861
119896 then set 119897(119861
119896) = 119887
119896
The point 119861119896is called the order-119896 successor point of point 119860
and119865119896(119860) is known as the order-k successor function of point
119860 where 119865119896(119860) = 119897(119861
119896) minus 119897(119860) = 119887
119896minus 119886 119896 = 1 2
Lemma 4 (see [16]) The order-1 successor function 1198651(119860) is
continuous
Lemma 5 (see [30]) The 119879-periodic solution (119909 119910) =
(120585(119905) 120578(119905)) of the system
119889119909
119889119905
= 119875 (119909 119910)
119889119910
119889119905
= 119876 (119909 119910) 120601 (119909 119910) = 0
Δ119909 = 120585 (119909 119910) Δ119910 = 120578 (119909 119910) 120601 (119909 119910) = 0
(4)
is orbitally asymptotically stable if the Floquet multiplier 120583satisfies the condition |120583| lt 1 where
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
(5)
with
Δ119896= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
(6)
and 119875 119876 120597120572120597119909 120597120572120597119910 120597120573120597119909 120597120573120597119910 120597120601120597119909 120597120601120597119910which are calculated for the points (120585(119905
119896) 120578(119905
119896))
119875+
= 119875(120585(119905+
119896) 120578(119905
+
119896)) and 119876
+= 119876(120585(119905
+
119896) 120578(119905
+
119896)) where
120601(119909 119910) is a sufficiently smooth function so grad 120601(119909 119910) = 0and 119905
119896(119896 isin 119873) is the time of the kth jump
Lemma 6 (see [31]) Let 119865 119877 times 119877 rarr 119877 be a one-parameterfamily of the 1198622 map that satisfies
(i) 119865(0 120583) = 0 (ii) (120597119865120597119909)(0 0) = 1 (iii) (1205972119865120597119909120597120583)(0 0) gt 0 (iv) (12059721198651205971199092)(0 0) lt 0
119865 has two branches of fixed points for 120583 near zero The firstbranch is 119909
1(120583) = 0 for all 120583 The second bifurcating branch
1199092(120583) changes its value from negative to positive as 120583 increases
through 120583 = 0 with 1199092(0) = 0 The fixed points of the first
branch are stable if 120583 lt 0 and unstable if 120583 gt 0 whereas thoseof the bifurcating branch have the opposite stability
3 Main Results
First we consider the case of system (1) without an impulsiveeffectWe set119875(119909 119910) = 119903119909(1minus119909119870)minus1198861199092119910(119887+1199092)119876(119909 119910) =120576119886119909
2119910(119887+119909
2)minus119898119910 and the equilibriumof system (1) without
the impulsive effect implies 119875(119909 119910) = 0 119876(119909 119910) = 0 so wecan obtain the following equilibrium under the conditions120576119886 gt 119898 and119870 gt 119909
lowast
(i) 1198640= (0 0) (total extinction)
(ii) 1198641= (119870 0) (extinction of the fish)
(iii) 1198642= (119909
lowast 119910
lowast) = (radic119898119887(120576119886 minus 119898) 120576119887119903(119870 minus 119909
lowast)(120576119886 minus
119898)119909lowast119870) (coexistence of phytoplankton and fish)
Both 119909 = 0 and 119910 = 0 are the trajectory of system (1) withoutan impulsive effect Thus the first quadrant is the invariantset
Indeed according to biological studies the phytoplank-ton stable state 119909lowast should be smaller than the parameter119870 because parameter 119870 is the maximum carrying capacityThus we only need to assume the condition 120576119886 gt 119898 In system(1) without an impulsive effect 119886 is the maximum predationrate of the fish 120576 is the maximum conversion and 120576119886 denotesthe maximum growth rate If condition 120576119886 le 119898 holds thatis the growth rate of the fishes is below the mortality rate ofthe fishes then the fishes may become extinct In system (1)without an impulsive effect based on a direct calculation theequilibrium 119864
0is always saddle Thus the equilibrium 119864
1is
locally asymptotical stable when the condition 120576119886 le 119898 holdsThen the solution of system (1) without an impulsive effectwill converge toward the equilibrium 119864
1in a certain field
that is the fishes will become extinct and the phytoplanktonwill bloom Phytoplankton blooms are observed frequentlybut the growth rate of fishes being less than the mortalityrate of fishes is usually rare in real life Therefore we assumethat condition 120576119886 gt 119898 holds in full Obviously 119910 = 119891(119909) =
119903(1minus119909119870)(119887+1199092)119886119909
2 is a vertical line and119909 = radic119898119887(120576119886 minus 119898)is a horizontal isocline By direct calculation the equilibrium119864lowast is locally asymptotically stable under the condition (120576119886 minus2119898)119870 gt minus2119898119909
lowast and the index of the equilibrium 119864lowast is +1
Throughout this paper we assume that the condition (119886120576 minus2119898)119870 gt minus2119898119909
lowast always holds based on ecological studies andwe let119873(119909 = ℎ) and119872(119909 = (1minus119901)ℎ) be the impulsive set andphase set respectively with the point 119874 = 119873 cap 119910 = 119891(119909)the point 119867 = 119872 cap 119910 = 119891(119909) and ℎ lt 119909
lowast For the case
where 119909lowastlt ℎ lt 119870 similar results can be obtained using the
same method
4 Discrete Dynamics in Nature and Society
(minus minus)
(minus +)
(+ minus)
(+ +)E0
E2
E1
x = K
(dxdt) = 0
(dydt) = 0
Figure 1 Direction of the trajectory in system (1) without animpulsive effect in the first quadrant
From 119891(119909) we know that the line 119909 = 0 is the asymptoteof the curve 119910 = 119891(119909) and 119910 gt 0 when 119909 lt 119870 119910 = 0 when119909 = 119870 119910 lt 0 when 119909 gt 119870 In addition when 119909 lt 119870the function 119891(119909) is a monotonically decreasing functionThe first quadrant is split into four parts by the isocline (seeFigure 1)
31 Existence of an Order-1 Periodic Solution for System (1)
311 The Case Where 120591 = 0 In this subsection we derivesome basic properties of the following subsystem of system(1) where fish 119910(119905) are absent
119889119909
119889119905
= 119903119909 (
119870 minus 119909
119870
) 119909 lt ℎ
Δ119909 = minus119901119909 119909 = ℎ
(7)
Setting 1199090= 119909(0) = (1 minus 119901)ℎ produces the following solution
of system (7) 119909(119905) = 119870(1 minus 119901)ℎ exp(119903(119905 minus 119899119879))(119870 minus (1 minus
119901)ℎ+ (1 minus119901)ℎ exp(119903(119905 minus 119899119879))) If we let 119879 = (1119903) ln((119870minus (1minus119901)ℎ)(119870 minus ℎ)(1 minus 119901)) 119909(119879) = ℎ and 119909(119879+) = (1 minus 119901)ℎ thismeans that system (1) has the following semitrivial periodicsolution
119909 (119905) =
119870 (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))119870 minus (1 minus 119901) ℎ + (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))
119910 (119905) = 0
(8)
where 119905 isin (119899119879 (119899 + 1)119879] 119899 isin 119873 which is implied by (120585(119905) 0)Thus the following theorem is obtained
Theorem 7 There exists a semitrivial periodic solution (8) tosystem (1) which is orbitally asymptotically stable if
0 lt 119902 lt Ψminus1minus 1 (9)
where Ψ = ((119870 minus (1 minus 119901)ℎ)(119870 minus ℎ)(1 minus 119901))minus119898119903
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp(minus 120576119886119870radic119887
119903 (119887 + 1198702)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(10)
Proof It is known that 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 +
1199092) 119876(119909 119910) = 120576119886119909
2119910(119887 + 119909
2) minus 119898119910 120572(119909 119910) = minus119901119909
120573(119909 119910) = 119902119910 120601(119909 119910) = 119909 minus ℎ (120585(119879) 120578(119879)) = (ℎ 0)and (120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ 0) Using Lemma 5 and astraightforward calculation it is possible to obtain
120597119875
120597119909
= 119903 (1 minus
2
119870
119909) minus
2119886119887119909119910
(119887 + 1199092)2
120597119876
120597119910
=
1205761198861199092
119887 + 1199092minus 119898
120597120572
120597119909
= minus119901
120597120572
120597119910
= 0
120597120573
120597119909
= 0
120597120573
120597119910
= 119902
120597120601
120597119909
= 1
120597120601
120597119910
= 0
Δ1= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
=
119875+(120585 (119879
+) 120578 (119879
+)) (1 + 119902)
119875 (120585 (119879) 120578 (119879))
= (1 minus 119901) (1 + 119902)
119870 minus (1 minus 119901) ℎ
119870 minus ℎ
(11)
Furthermore
exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= exp[int119879
0
(119903 (1 minus
2
119870
120585 (119905)) +
120576119886(120585 (119905))2
119887 + (120585 (119905))2minus 119898)119889119905]
Discrete Dynamics in Nature and Society 5
y
xM N
E2
B
B
+
B+
A
D
F
EC
C
(a)
y
x
xM N
E2
B
B
+
A
D
F
EC
C
B+
(b)
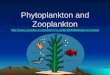
Figure 2 The proof of Theorems 9 and 10
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
119903minus119898119903
(
119870 minus ℎ
119870 minus (1 minus 119901) ℎ
)
2
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp( minus 120576119886119870radic119887
119903 (119887 + 1198702)
times ( arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(12)
Therefore it is possible to obtain the Floquet multiplier 120583by direct calculation as follows
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= (1 + 119902)Ψ
(13)
Thus |120583| lt 1 if (9) holds This completes the proof
Remark 8 If 119902lowast = Ψminus1minus 1 a bifurcation may occur when
119902 = 119902lowast for |120583| = 1 whereas a positive periodic solution may
emerge if 119902 gt 119902lowast
Theorem 9 There exists a positive order-1 periodic solution tosystem (1) if 119902 gt 119902
lowast where the semitrivial periodic solution isorbitally unstable
Proof Because ℎ lt 119909lowast both119872 and119873 are in the left 1198642 The
trajectory that passes through point 119860 where 119860 = 119872 cap 119910 =
119891(119909) tangents to119872 at point 119860 and intersects 119873 at point 119861Thus there may be three possible cases for the phase point(119861+) for point 119861 as follows (see Figure 2(a))
Case 1 (119910119860= 119910
119861+) In this case it is obvious that 119860119861119860 is an
order-1 periodic solution
Case 2 (119910119860lt 119910
119861+)The point 119861+ is the order-1 successor point
of point 119860 so the order-1 successor function of point 119860 isgreater than zero that is 119865
1(119860) = 119910
119861+ minus 119910
119860gt 0 In addition
the trajectory with the initial point 119861+ intersects impulsiveset119873 at point 119862 and reaches 119862+ via the impulsive effect Dueto the disjointedness of the trajectory and impulsive line insystem (1) it is easy to see that point119862+ is located below point119861+ Therefore the successor function 119865
1(119861
+) lt 0 According
to Lemma 4 there exists a point 119866 isin 119872 such that 1198651(119866) = 0
hence there exists an order-1 periodic solution
Case 3 (119910119860
gt 119910119861+) According to 119910
119860gt 119910
119861+ the order-
1 successor point of point 119860 is located below point 119860 so1198651(119860) lt 0 If we suppose that 119901
0is a crossover point of
the semitrivial periodic solution and impulsive set becausethe semitrivial periodic solution is orbitally unstable then
6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
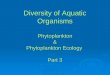
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
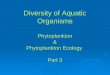
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
years and showed that intense stocking with filter-feedingfishes that is silver carp (Hypophthalmichthys molitrix) andbighead carp (Aristichthys nobilis) played a decisive role inthe elimination of blue algae blooms from the lakeThe resultsindicated that silver carp and bighead carp controlled the bluealgae blooms effectively and the effective biomass requiredto contain the blooms was determined to be 46ndash50 gm3 Inanother study [8] a mesocosm experiment was conducted toassess the impact of a moderate silver carp biomass (41 gm3
or 850 kgha) on the plankton community and the waterquality of the eutrophic Paranoa Reservoir (Brasılia Brazil)The results as well as other successful examples of blue-greencontrol using silver carp in lakes and reservoirs [9ndash11] suggestthat the use of silver carp is a promising management tool forsuppressing excess filamentous blue-green algae such as thatin Paranoa Reservoir and for controllingMicrocystis bloomsin critical areas [8]
In addition the use of biological methods can reducepollution protect the ecological balance and bring economicbenefits However the effects of biological method maybe very slow Thus we need to compare the suitability ofusing biological methods and artificial methods at the sametime The use of chemical reagents may be reduced withbiological method thereby reducing the negative effects ofchemical methods Based on previous research we used thetheory of impulsive differential equations [12ndash14] to develop aphytoplankton-fishmodel to investigate the feasibility of bio-logical and artificial methods Many researchers have studiedsome ecological systemswith impulsive differential equations[15ndash22] including the use of biological and chemical controls
In our model a logistic growth function represents thegross rate of phytoplankton production Based on previousstudies [2 23 24] a Holling type-III function representsthe interaction between the phytoplankton and the fishthat is predation of the phytoplankton Furthermore basedon the work of Wyatt and Horwood [25] Uye [26] andLevin and Segel [27] Truscott and Brindley [2] discussed therationality of using a Holling type-III function to investigatethe interaction between phytoplankton and zooplanktonWeconsider that the model is reasonable although zooplanktonis replaced by fish in our model It is known that some filter-feeding fish feed on phytoplankton so the population densityof phytoplankton can control the rate of fish production Inthis system the loss of fish occurs via death and naturalpredation by higher trophic levels in the food web Thus weassume a linear loss of fish
According to other studies [28 29] some phytoplanktonblooms may be controlled within a short period of time(lt24 h) using artificial methods In our model we assumethat the time unit is a day and the artificial and biologicalmethods are modeled using impulsive differential equationsThe model is described as follows
119889119909
119889119905
= 119903119909 (1 minus
119909
119870
) minus
1198861199092119910
119887 + 1199092
119889119910
119889119905
=
1205761198861199092119910
119887 + 1199092minus 119898119910
119909 lt ℎ
Δ119909 = minus119901119909
Δ119910 = 119902119910 + 120591119909 = ℎ
(1)
where 119909 denotes the phytoplankton population density unit120583gL 119910 denotes the fish population density unit 120583gL 119903 isthe intrinsic growth rate of phytoplankton population 119886 isthe maximum predation rate of the fish 120576 is the conversionefficiency 119870 is the carrying capacity 119887 is a half-saturationconstant and 119898 is the mortality and respiration rate of fishwhile the termΔ119909 = minus119901119909 whereΔ119909 = 119909(119905+)minus119909(119905) representsartificial control and the term Δ119910 = (1 + 119902)119910 + 120591 where Δ119910 =119910(119905
+) minus 119910(119905) represents biological control The parameters
119901 isin (0 1) represent the control levels of artificial methodsℎ gt 0 denotes the critical value of a phytoplankton bloomand 120591 ge 0 119902 gt 0 represents the release level of fish requiredto control phytoplankton and we set Δ119909 = 120572(119909 119910) = minus119901119909Δ119910 = 120573(119909 119910) = 119902119910 + 120591
The rest of this paper is organized as follows In Section 2we provide some preliminary details which are the theo-retical basis of the following investigation Next we discussthe existence of an order-1 periodic solution attractor andbifurcation in Section 3 which provides a theoretical basisfor the study of the biological method In addition somenumerical results are presented in Section 4 which illustratethe validity of the theory In the final section we discuss thefeasibility of the artificial and biological methods
2 Preliminaries
Given the following autonomous system with impulsivecontrol
119889119909
119889119905
= 119875 (119909 119910)
119889119910
119889119905
= 119876 (119909 119910) (119909 119910) notin 119873
Δ119909 = 119891 (119909 119910) Δ119910 = 119892 (119909 119910) (119909 119910) isin 119873
(2)
where 119905 isin 119877 (119909 119910) isin 1198772 and 119875119876 119891 119892 1198772rarr 119877 119873 sub 119877
2
are the set of impulses it is assumed that 119875 119876 119891 119892 are allcontinuous with respect to 119909 119910 in 1198772 so the points in119873 sub 119877
2
lie on a line For each point 119878(119909 119910) isin 119873 119868 1198772rarr 119877
2 isdefined
119868 (119878) = 119878+= (119909
+ 119910
+) isin 119877
2
119909+= 119909 + 119891 (119909 119910) 119910
+= 119910 + 119892 (119909 119910)
(3)
Let 119872 = 119868(119873) be the phase set of 119873 where 119873 cap 119872 = 120601System (2) is generally known as a semicontinuous dynamicsystem
Definition 1 Let Γ be an order-1 periodic solution of system(2) where Γ is
(1) orbitally stable if forall120576 gt 0 exist119901 isin 119873 119901 isin Γ and exist120575 gt 0such thatforall119901
1isin cup(119901 120575)120588(120587(119901
1 119905) Γ) lt 120576when 119905 gt 119905
0
(2) orbitally attractive if forall120576 gt 0 and forall1199012isin 119873 exist119879 gt 0
such that 120588(120587(1199012 119905) Γ) lt 120576 when 119905 gt 119879 + 119905
0
Discrete Dynamics in Nature and Society 3
(3) orbitally asymptotically stable if it is orbitally stableand orbitally attractive
In the present study cup(119901 120575) denotes the 120575-neighborhood ofthe point 119901 isin 119873 120588(120587(119901
1 119905) Γ) is the distance from 120587(119901
1 119905) to
Γ and 120587(1199011 119905) is the solution of system (2) that satisfies the
initial condition 120587(1199011 1199050) = 119901
1
Definition 2 The phase plane is divided into two parts basedon the trajectory of the differential equations that constitutethe order-1 cycle The section that contains the impulse lineand the trajectory is known as the inside of the order-1 cycle
Definition 3 Assuming that119872 and119873 are both straight lineswe define a new number axis 119897 on 119873 It is assumed that 119873intersects with the 119909-axis at point119876The point119876 is the originon the number axis 119897 and both the positive direction andunit length are consistent with the coordinate axis 119910 Forany point 119860 isin 119897 let 119897(119860) = 119886 be a coordinate of point 119860Furthermore supposing that the trajectory through point 119860via 119896th impulses intersects119873 at point 119861
119896 then set 119897(119861
119896) = 119887
119896
The point 119861119896is called the order-119896 successor point of point 119860
and119865119896(119860) is known as the order-k successor function of point
119860 where 119865119896(119860) = 119897(119861
119896) minus 119897(119860) = 119887
119896minus 119886 119896 = 1 2
Lemma 4 (see [16]) The order-1 successor function 1198651(119860) is
continuous
Lemma 5 (see [30]) The 119879-periodic solution (119909 119910) =
(120585(119905) 120578(119905)) of the system
119889119909
119889119905
= 119875 (119909 119910)
119889119910
119889119905
= 119876 (119909 119910) 120601 (119909 119910) = 0
Δ119909 = 120585 (119909 119910) Δ119910 = 120578 (119909 119910) 120601 (119909 119910) = 0
(4)
is orbitally asymptotically stable if the Floquet multiplier 120583satisfies the condition |120583| lt 1 where
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
(5)
with
Δ119896= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
(6)
and 119875 119876 120597120572120597119909 120597120572120597119910 120597120573120597119909 120597120573120597119910 120597120601120597119909 120597120601120597119910which are calculated for the points (120585(119905
119896) 120578(119905
119896))
119875+
= 119875(120585(119905+
119896) 120578(119905
+
119896)) and 119876
+= 119876(120585(119905
+
119896) 120578(119905
+
119896)) where
120601(119909 119910) is a sufficiently smooth function so grad 120601(119909 119910) = 0and 119905
119896(119896 isin 119873) is the time of the kth jump
Lemma 6 (see [31]) Let 119865 119877 times 119877 rarr 119877 be a one-parameterfamily of the 1198622 map that satisfies
(i) 119865(0 120583) = 0 (ii) (120597119865120597119909)(0 0) = 1 (iii) (1205972119865120597119909120597120583)(0 0) gt 0 (iv) (12059721198651205971199092)(0 0) lt 0
119865 has two branches of fixed points for 120583 near zero The firstbranch is 119909
1(120583) = 0 for all 120583 The second bifurcating branch
1199092(120583) changes its value from negative to positive as 120583 increases
through 120583 = 0 with 1199092(0) = 0 The fixed points of the first
branch are stable if 120583 lt 0 and unstable if 120583 gt 0 whereas thoseof the bifurcating branch have the opposite stability
3 Main Results
First we consider the case of system (1) without an impulsiveeffectWe set119875(119909 119910) = 119903119909(1minus119909119870)minus1198861199092119910(119887+1199092)119876(119909 119910) =120576119886119909
2119910(119887+119909
2)minus119898119910 and the equilibriumof system (1) without
the impulsive effect implies 119875(119909 119910) = 0 119876(119909 119910) = 0 so wecan obtain the following equilibrium under the conditions120576119886 gt 119898 and119870 gt 119909
lowast
(i) 1198640= (0 0) (total extinction)
(ii) 1198641= (119870 0) (extinction of the fish)
(iii) 1198642= (119909
lowast 119910
lowast) = (radic119898119887(120576119886 minus 119898) 120576119887119903(119870 minus 119909
lowast)(120576119886 minus
119898)119909lowast119870) (coexistence of phytoplankton and fish)
Both 119909 = 0 and 119910 = 0 are the trajectory of system (1) withoutan impulsive effect Thus the first quadrant is the invariantset
Indeed according to biological studies the phytoplank-ton stable state 119909lowast should be smaller than the parameter119870 because parameter 119870 is the maximum carrying capacityThus we only need to assume the condition 120576119886 gt 119898 In system(1) without an impulsive effect 119886 is the maximum predationrate of the fish 120576 is the maximum conversion and 120576119886 denotesthe maximum growth rate If condition 120576119886 le 119898 holds thatis the growth rate of the fishes is below the mortality rate ofthe fishes then the fishes may become extinct In system (1)without an impulsive effect based on a direct calculation theequilibrium 119864
0is always saddle Thus the equilibrium 119864
1is
locally asymptotical stable when the condition 120576119886 le 119898 holdsThen the solution of system (1) without an impulsive effectwill converge toward the equilibrium 119864
1in a certain field
that is the fishes will become extinct and the phytoplanktonwill bloom Phytoplankton blooms are observed frequentlybut the growth rate of fishes being less than the mortalityrate of fishes is usually rare in real life Therefore we assumethat condition 120576119886 gt 119898 holds in full Obviously 119910 = 119891(119909) =
119903(1minus119909119870)(119887+1199092)119886119909
2 is a vertical line and119909 = radic119898119887(120576119886 minus 119898)is a horizontal isocline By direct calculation the equilibrium119864lowast is locally asymptotically stable under the condition (120576119886 minus2119898)119870 gt minus2119898119909
lowast and the index of the equilibrium 119864lowast is +1
Throughout this paper we assume that the condition (119886120576 minus2119898)119870 gt minus2119898119909
lowast always holds based on ecological studies andwe let119873(119909 = ℎ) and119872(119909 = (1minus119901)ℎ) be the impulsive set andphase set respectively with the point 119874 = 119873 cap 119910 = 119891(119909)the point 119867 = 119872 cap 119910 = 119891(119909) and ℎ lt 119909
lowast For the case
where 119909lowastlt ℎ lt 119870 similar results can be obtained using the
same method
4 Discrete Dynamics in Nature and Society
(minus minus)
(minus +)
(+ minus)
(+ +)E0
E2
E1
x = K
(dxdt) = 0
(dydt) = 0
Figure 1 Direction of the trajectory in system (1) without animpulsive effect in the first quadrant
From 119891(119909) we know that the line 119909 = 0 is the asymptoteof the curve 119910 = 119891(119909) and 119910 gt 0 when 119909 lt 119870 119910 = 0 when119909 = 119870 119910 lt 0 when 119909 gt 119870 In addition when 119909 lt 119870the function 119891(119909) is a monotonically decreasing functionThe first quadrant is split into four parts by the isocline (seeFigure 1)
31 Existence of an Order-1 Periodic Solution for System (1)
311 The Case Where 120591 = 0 In this subsection we derivesome basic properties of the following subsystem of system(1) where fish 119910(119905) are absent
119889119909
119889119905
= 119903119909 (
119870 minus 119909
119870
) 119909 lt ℎ
Δ119909 = minus119901119909 119909 = ℎ
(7)
Setting 1199090= 119909(0) = (1 minus 119901)ℎ produces the following solution
of system (7) 119909(119905) = 119870(1 minus 119901)ℎ exp(119903(119905 minus 119899119879))(119870 minus (1 minus
119901)ℎ+ (1 minus119901)ℎ exp(119903(119905 minus 119899119879))) If we let 119879 = (1119903) ln((119870minus (1minus119901)ℎ)(119870 minus ℎ)(1 minus 119901)) 119909(119879) = ℎ and 119909(119879+) = (1 minus 119901)ℎ thismeans that system (1) has the following semitrivial periodicsolution
119909 (119905) =
119870 (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))119870 minus (1 minus 119901) ℎ + (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))
119910 (119905) = 0
(8)
where 119905 isin (119899119879 (119899 + 1)119879] 119899 isin 119873 which is implied by (120585(119905) 0)Thus the following theorem is obtained
Theorem 7 There exists a semitrivial periodic solution (8) tosystem (1) which is orbitally asymptotically stable if
0 lt 119902 lt Ψminus1minus 1 (9)
where Ψ = ((119870 minus (1 minus 119901)ℎ)(119870 minus ℎ)(1 minus 119901))minus119898119903
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp(minus 120576119886119870radic119887
119903 (119887 + 1198702)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(10)
Proof It is known that 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 +
1199092) 119876(119909 119910) = 120576119886119909
2119910(119887 + 119909
2) minus 119898119910 120572(119909 119910) = minus119901119909
120573(119909 119910) = 119902119910 120601(119909 119910) = 119909 minus ℎ (120585(119879) 120578(119879)) = (ℎ 0)and (120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ 0) Using Lemma 5 and astraightforward calculation it is possible to obtain
120597119875
120597119909
= 119903 (1 minus
2
119870
119909) minus
2119886119887119909119910
(119887 + 1199092)2
120597119876
120597119910
=
1205761198861199092
119887 + 1199092minus 119898
120597120572
120597119909
= minus119901
120597120572
120597119910
= 0
120597120573
120597119909
= 0
120597120573
120597119910
= 119902
120597120601
120597119909
= 1
120597120601
120597119910
= 0
Δ1= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
=
119875+(120585 (119879
+) 120578 (119879
+)) (1 + 119902)
119875 (120585 (119879) 120578 (119879))
= (1 minus 119901) (1 + 119902)
119870 minus (1 minus 119901) ℎ
119870 minus ℎ
(11)
Furthermore
exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= exp[int119879
0
(119903 (1 minus
2
119870
120585 (119905)) +
120576119886(120585 (119905))2
119887 + (120585 (119905))2minus 119898)119889119905]
Discrete Dynamics in Nature and Society 5
y
xM N
E2
B
B
+
B+
A
D
F
EC
C
(a)
y
x
xM N
E2
B
B
+
A
D
F
EC
C
B+
(b)
Figure 2 The proof of Theorems 9 and 10
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
119903minus119898119903
(
119870 minus ℎ
119870 minus (1 minus 119901) ℎ
)
2
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp( minus 120576119886119870radic119887
119903 (119887 + 1198702)
times ( arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(12)
Therefore it is possible to obtain the Floquet multiplier 120583by direct calculation as follows
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= (1 + 119902)Ψ
(13)
Thus |120583| lt 1 if (9) holds This completes the proof
Remark 8 If 119902lowast = Ψminus1minus 1 a bifurcation may occur when
119902 = 119902lowast for |120583| = 1 whereas a positive periodic solution may
emerge if 119902 gt 119902lowast
Theorem 9 There exists a positive order-1 periodic solution tosystem (1) if 119902 gt 119902
lowast where the semitrivial periodic solution isorbitally unstable
Proof Because ℎ lt 119909lowast both119872 and119873 are in the left 1198642 The
trajectory that passes through point 119860 where 119860 = 119872 cap 119910 =
119891(119909) tangents to119872 at point 119860 and intersects 119873 at point 119861Thus there may be three possible cases for the phase point(119861+) for point 119861 as follows (see Figure 2(a))
Case 1 (119910119860= 119910
119861+) In this case it is obvious that 119860119861119860 is an
order-1 periodic solution
Case 2 (119910119860lt 119910
119861+)The point 119861+ is the order-1 successor point
of point 119860 so the order-1 successor function of point 119860 isgreater than zero that is 119865
1(119860) = 119910
119861+ minus 119910
119860gt 0 In addition
the trajectory with the initial point 119861+ intersects impulsiveset119873 at point 119862 and reaches 119862+ via the impulsive effect Dueto the disjointedness of the trajectory and impulsive line insystem (1) it is easy to see that point119862+ is located below point119861+ Therefore the successor function 119865
1(119861
+) lt 0 According
to Lemma 4 there exists a point 119866 isin 119872 such that 1198651(119866) = 0
hence there exists an order-1 periodic solution
Case 3 (119910119860
gt 119910119861+) According to 119910
119860gt 119910
119861+ the order-
1 successor point of point 119860 is located below point 119860 so1198651(119860) lt 0 If we suppose that 119901
0is a crossover point of
the semitrivial periodic solution and impulsive set becausethe semitrivial periodic solution is orbitally unstable then
6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
(3) orbitally asymptotically stable if it is orbitally stableand orbitally attractive
In the present study cup(119901 120575) denotes the 120575-neighborhood ofthe point 119901 isin 119873 120588(120587(119901
1 119905) Γ) is the distance from 120587(119901
1 119905) to
Γ and 120587(1199011 119905) is the solution of system (2) that satisfies the
initial condition 120587(1199011 1199050) = 119901
1
Definition 2 The phase plane is divided into two parts basedon the trajectory of the differential equations that constitutethe order-1 cycle The section that contains the impulse lineand the trajectory is known as the inside of the order-1 cycle
Definition 3 Assuming that119872 and119873 are both straight lineswe define a new number axis 119897 on 119873 It is assumed that 119873intersects with the 119909-axis at point119876The point119876 is the originon the number axis 119897 and both the positive direction andunit length are consistent with the coordinate axis 119910 Forany point 119860 isin 119897 let 119897(119860) = 119886 be a coordinate of point 119860Furthermore supposing that the trajectory through point 119860via 119896th impulses intersects119873 at point 119861
119896 then set 119897(119861
119896) = 119887
119896
The point 119861119896is called the order-119896 successor point of point 119860
and119865119896(119860) is known as the order-k successor function of point
119860 where 119865119896(119860) = 119897(119861
119896) minus 119897(119860) = 119887
119896minus 119886 119896 = 1 2
Lemma 4 (see [16]) The order-1 successor function 1198651(119860) is
continuous
Lemma 5 (see [30]) The 119879-periodic solution (119909 119910) =
(120585(119905) 120578(119905)) of the system
119889119909
119889119905
= 119875 (119909 119910)
119889119910
119889119905
= 119876 (119909 119910) 120601 (119909 119910) = 0
Δ119909 = 120585 (119909 119910) Δ119910 = 120578 (119909 119910) 120601 (119909 119910) = 0
(4)
is orbitally asymptotically stable if the Floquet multiplier 120583satisfies the condition |120583| lt 1 where
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
(5)
with
Δ119896= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
(6)
and 119875 119876 120597120572120597119909 120597120572120597119910 120597120573120597119909 120597120573120597119910 120597120601120597119909 120597120601120597119910which are calculated for the points (120585(119905
119896) 120578(119905
119896))
119875+
= 119875(120585(119905+
119896) 120578(119905
+
119896)) and 119876
+= 119876(120585(119905
+
119896) 120578(119905
+
119896)) where
120601(119909 119910) is a sufficiently smooth function so grad 120601(119909 119910) = 0and 119905
119896(119896 isin 119873) is the time of the kth jump
Lemma 6 (see [31]) Let 119865 119877 times 119877 rarr 119877 be a one-parameterfamily of the 1198622 map that satisfies
(i) 119865(0 120583) = 0 (ii) (120597119865120597119909)(0 0) = 1 (iii) (1205972119865120597119909120597120583)(0 0) gt 0 (iv) (12059721198651205971199092)(0 0) lt 0
119865 has two branches of fixed points for 120583 near zero The firstbranch is 119909
1(120583) = 0 for all 120583 The second bifurcating branch
1199092(120583) changes its value from negative to positive as 120583 increases
through 120583 = 0 with 1199092(0) = 0 The fixed points of the first
branch are stable if 120583 lt 0 and unstable if 120583 gt 0 whereas thoseof the bifurcating branch have the opposite stability
3 Main Results
First we consider the case of system (1) without an impulsiveeffectWe set119875(119909 119910) = 119903119909(1minus119909119870)minus1198861199092119910(119887+1199092)119876(119909 119910) =120576119886119909
2119910(119887+119909
2)minus119898119910 and the equilibriumof system (1) without
the impulsive effect implies 119875(119909 119910) = 0 119876(119909 119910) = 0 so wecan obtain the following equilibrium under the conditions120576119886 gt 119898 and119870 gt 119909
lowast
(i) 1198640= (0 0) (total extinction)
(ii) 1198641= (119870 0) (extinction of the fish)
(iii) 1198642= (119909
lowast 119910
lowast) = (radic119898119887(120576119886 minus 119898) 120576119887119903(119870 minus 119909
lowast)(120576119886 minus
119898)119909lowast119870) (coexistence of phytoplankton and fish)
Both 119909 = 0 and 119910 = 0 are the trajectory of system (1) withoutan impulsive effect Thus the first quadrant is the invariantset
Indeed according to biological studies the phytoplank-ton stable state 119909lowast should be smaller than the parameter119870 because parameter 119870 is the maximum carrying capacityThus we only need to assume the condition 120576119886 gt 119898 In system(1) without an impulsive effect 119886 is the maximum predationrate of the fish 120576 is the maximum conversion and 120576119886 denotesthe maximum growth rate If condition 120576119886 le 119898 holds thatis the growth rate of the fishes is below the mortality rate ofthe fishes then the fishes may become extinct In system (1)without an impulsive effect based on a direct calculation theequilibrium 119864
0is always saddle Thus the equilibrium 119864
1is
locally asymptotical stable when the condition 120576119886 le 119898 holdsThen the solution of system (1) without an impulsive effectwill converge toward the equilibrium 119864
1in a certain field
that is the fishes will become extinct and the phytoplanktonwill bloom Phytoplankton blooms are observed frequentlybut the growth rate of fishes being less than the mortalityrate of fishes is usually rare in real life Therefore we assumethat condition 120576119886 gt 119898 holds in full Obviously 119910 = 119891(119909) =
119903(1minus119909119870)(119887+1199092)119886119909
2 is a vertical line and119909 = radic119898119887(120576119886 minus 119898)is a horizontal isocline By direct calculation the equilibrium119864lowast is locally asymptotically stable under the condition (120576119886 minus2119898)119870 gt minus2119898119909
lowast and the index of the equilibrium 119864lowast is +1
Throughout this paper we assume that the condition (119886120576 minus2119898)119870 gt minus2119898119909
lowast always holds based on ecological studies andwe let119873(119909 = ℎ) and119872(119909 = (1minus119901)ℎ) be the impulsive set andphase set respectively with the point 119874 = 119873 cap 119910 = 119891(119909)the point 119867 = 119872 cap 119910 = 119891(119909) and ℎ lt 119909
lowast For the case
where 119909lowastlt ℎ lt 119870 similar results can be obtained using the
same method
4 Discrete Dynamics in Nature and Society
(minus minus)
(minus +)
(+ minus)
(+ +)E0
E2
E1
x = K
(dxdt) = 0
(dydt) = 0
Figure 1 Direction of the trajectory in system (1) without animpulsive effect in the first quadrant
From 119891(119909) we know that the line 119909 = 0 is the asymptoteof the curve 119910 = 119891(119909) and 119910 gt 0 when 119909 lt 119870 119910 = 0 when119909 = 119870 119910 lt 0 when 119909 gt 119870 In addition when 119909 lt 119870the function 119891(119909) is a monotonically decreasing functionThe first quadrant is split into four parts by the isocline (seeFigure 1)
31 Existence of an Order-1 Periodic Solution for System (1)
311 The Case Where 120591 = 0 In this subsection we derivesome basic properties of the following subsystem of system(1) where fish 119910(119905) are absent
119889119909
119889119905
= 119903119909 (
119870 minus 119909
119870
) 119909 lt ℎ
Δ119909 = minus119901119909 119909 = ℎ
(7)
Setting 1199090= 119909(0) = (1 minus 119901)ℎ produces the following solution
of system (7) 119909(119905) = 119870(1 minus 119901)ℎ exp(119903(119905 minus 119899119879))(119870 minus (1 minus
119901)ℎ+ (1 minus119901)ℎ exp(119903(119905 minus 119899119879))) If we let 119879 = (1119903) ln((119870minus (1minus119901)ℎ)(119870 minus ℎ)(1 minus 119901)) 119909(119879) = ℎ and 119909(119879+) = (1 minus 119901)ℎ thismeans that system (1) has the following semitrivial periodicsolution
119909 (119905) =
119870 (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))119870 minus (1 minus 119901) ℎ + (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))
119910 (119905) = 0
(8)
where 119905 isin (119899119879 (119899 + 1)119879] 119899 isin 119873 which is implied by (120585(119905) 0)Thus the following theorem is obtained
Theorem 7 There exists a semitrivial periodic solution (8) tosystem (1) which is orbitally asymptotically stable if
0 lt 119902 lt Ψminus1minus 1 (9)
where Ψ = ((119870 minus (1 minus 119901)ℎ)(119870 minus ℎ)(1 minus 119901))minus119898119903
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp(minus 120576119886119870radic119887
119903 (119887 + 1198702)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(10)
Proof It is known that 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 +
1199092) 119876(119909 119910) = 120576119886119909
2119910(119887 + 119909
2) minus 119898119910 120572(119909 119910) = minus119901119909
120573(119909 119910) = 119902119910 120601(119909 119910) = 119909 minus ℎ (120585(119879) 120578(119879)) = (ℎ 0)and (120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ 0) Using Lemma 5 and astraightforward calculation it is possible to obtain
120597119875
120597119909
= 119903 (1 minus
2
119870
119909) minus
2119886119887119909119910
(119887 + 1199092)2
120597119876
120597119910
=
1205761198861199092
119887 + 1199092minus 119898
120597120572
120597119909
= minus119901
120597120572
120597119910
= 0
120597120573
120597119909
= 0
120597120573
120597119910
= 119902
120597120601
120597119909
= 1
120597120601
120597119910
= 0
Δ1= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
=
119875+(120585 (119879
+) 120578 (119879
+)) (1 + 119902)
119875 (120585 (119879) 120578 (119879))
= (1 minus 119901) (1 + 119902)
119870 minus (1 minus 119901) ℎ
119870 minus ℎ
(11)
Furthermore
exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= exp[int119879
0
(119903 (1 minus
2
119870
120585 (119905)) +
120576119886(120585 (119905))2
119887 + (120585 (119905))2minus 119898)119889119905]
Discrete Dynamics in Nature and Society 5
y
xM N
E2
B
B
+
B+
A
D
F
EC
C
(a)
y
x
xM N
E2
B
B
+
A
D
F
EC
C
B+
(b)
Figure 2 The proof of Theorems 9 and 10
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
119903minus119898119903
(
119870 minus ℎ
119870 minus (1 minus 119901) ℎ
)
2
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp( minus 120576119886119870radic119887
119903 (119887 + 1198702)
times ( arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(12)
Therefore it is possible to obtain the Floquet multiplier 120583by direct calculation as follows
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= (1 + 119902)Ψ
(13)
Thus |120583| lt 1 if (9) holds This completes the proof
Remark 8 If 119902lowast = Ψminus1minus 1 a bifurcation may occur when
119902 = 119902lowast for |120583| = 1 whereas a positive periodic solution may
emerge if 119902 gt 119902lowast
Theorem 9 There exists a positive order-1 periodic solution tosystem (1) if 119902 gt 119902
lowast where the semitrivial periodic solution isorbitally unstable
Proof Because ℎ lt 119909lowast both119872 and119873 are in the left 1198642 The
trajectory that passes through point 119860 where 119860 = 119872 cap 119910 =
119891(119909) tangents to119872 at point 119860 and intersects 119873 at point 119861Thus there may be three possible cases for the phase point(119861+) for point 119861 as follows (see Figure 2(a))
Case 1 (119910119860= 119910
119861+) In this case it is obvious that 119860119861119860 is an
order-1 periodic solution
Case 2 (119910119860lt 119910
119861+)The point 119861+ is the order-1 successor point
of point 119860 so the order-1 successor function of point 119860 isgreater than zero that is 119865
1(119860) = 119910
119861+ minus 119910
119860gt 0 In addition
the trajectory with the initial point 119861+ intersects impulsiveset119873 at point 119862 and reaches 119862+ via the impulsive effect Dueto the disjointedness of the trajectory and impulsive line insystem (1) it is easy to see that point119862+ is located below point119861+ Therefore the successor function 119865
1(119861
+) lt 0 According
to Lemma 4 there exists a point 119866 isin 119872 such that 1198651(119866) = 0
hence there exists an order-1 periodic solution
Case 3 (119910119860
gt 119910119861+) According to 119910
119860gt 119910
119861+ the order-
1 successor point of point 119860 is located below point 119860 so1198651(119860) lt 0 If we suppose that 119901
0is a crossover point of
the semitrivial periodic solution and impulsive set becausethe semitrivial periodic solution is orbitally unstable then
6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
(minus minus)
(minus +)
(+ minus)
(+ +)E0
E2
E1
x = K
(dxdt) = 0
(dydt) = 0
Figure 1 Direction of the trajectory in system (1) without animpulsive effect in the first quadrant
From 119891(119909) we know that the line 119909 = 0 is the asymptoteof the curve 119910 = 119891(119909) and 119910 gt 0 when 119909 lt 119870 119910 = 0 when119909 = 119870 119910 lt 0 when 119909 gt 119870 In addition when 119909 lt 119870the function 119891(119909) is a monotonically decreasing functionThe first quadrant is split into four parts by the isocline (seeFigure 1)
31 Existence of an Order-1 Periodic Solution for System (1)
311 The Case Where 120591 = 0 In this subsection we derivesome basic properties of the following subsystem of system(1) where fish 119910(119905) are absent
119889119909
119889119905
= 119903119909 (
119870 minus 119909
119870
) 119909 lt ℎ
Δ119909 = minus119901119909 119909 = ℎ
(7)
Setting 1199090= 119909(0) = (1 minus 119901)ℎ produces the following solution
of system (7) 119909(119905) = 119870(1 minus 119901)ℎ exp(119903(119905 minus 119899119879))(119870 minus (1 minus
119901)ℎ+ (1 minus119901)ℎ exp(119903(119905 minus 119899119879))) If we let 119879 = (1119903) ln((119870minus (1minus119901)ℎ)(119870 minus ℎ)(1 minus 119901)) 119909(119879) = ℎ and 119909(119879+) = (1 minus 119901)ℎ thismeans that system (1) has the following semitrivial periodicsolution
119909 (119905) =
119870 (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))119870 minus (1 minus 119901) ℎ + (1 minus 119901) ℎ exp (119903 (119905 minus 119899119879))
119910 (119905) = 0
(8)
where 119905 isin (119899119879 (119899 + 1)119879] 119899 isin 119873 which is implied by (120585(119905) 0)Thus the following theorem is obtained
Theorem 7 There exists a semitrivial periodic solution (8) tosystem (1) which is orbitally asymptotically stable if
0 lt 119902 lt Ψminus1minus 1 (9)
where Ψ = ((119870 minus (1 minus 119901)ℎ)(119870 minus ℎ)(1 minus 119901))minus119898119903
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp(minus 120576119886119870radic119887
119903 (119887 + 1198702)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(10)
Proof It is known that 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 +
1199092) 119876(119909 119910) = 120576119886119909
2119910(119887 + 119909
2) minus 119898119910 120572(119909 119910) = minus119901119909
120573(119909 119910) = 119902119910 120601(119909 119910) = 119909 minus ℎ (120585(119879) 120578(119879)) = (ℎ 0)and (120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ 0) Using Lemma 5 and astraightforward calculation it is possible to obtain
120597119875
120597119909
= 119903 (1 minus
2
119870
119909) minus
2119886119887119909119910
(119887 + 1199092)2
120597119876
120597119910
=
1205761198861199092
119887 + 1199092minus 119898
120597120572
120597119909
= minus119901
120597120572
120597119910
= 0
120597120573
120597119909
= 0
120597120573
120597119910
= 119902
120597120601
120597119909
= 1
120597120601
120597119910
= 0
Δ1= (119875
+(
120597120573
120597119910
120597120601
120597119909
minus
120597120573
120597119909
120597120601
120597119910
+
120597120601
120597119909
)
+ 119876+(
120597120572
120597119909
120597120601
120597119910
minus
120597120572
120597119910
120597120601
120597119909
+
120597120601
120597119910
))
times (119875
120597120601
120597119909
+ 119876
120597120601
120597119910
)
minus1
=
119875+(120585 (119879
+) 120578 (119879
+)) (1 + 119902)
119875 (120585 (119879) 120578 (119879))
= (1 minus 119901) (1 + 119902)
119870 minus (1 minus 119901) ℎ
119870 minus ℎ
(11)
Furthermore
exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= exp[int119879
0
(119903 (1 minus
2
119870
120585 (119905)) +
120576119886(120585 (119905))2
119887 + (120585 (119905))2minus 119898)119889119905]
Discrete Dynamics in Nature and Society 5
y
xM N
E2
B
B
+
B+
A
D
F
EC
C
(a)
y
x
xM N
E2
B
B
+
A
D
F
EC
C
B+
(b)
Figure 2 The proof of Theorems 9 and 10
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
119903minus119898119903
(
119870 minus ℎ
119870 minus (1 minus 119901) ℎ
)
2
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp( minus 120576119886119870radic119887
119903 (119887 + 1198702)
times ( arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(12)
Therefore it is possible to obtain the Floquet multiplier 120583by direct calculation as follows
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= (1 + 119902)Ψ
(13)
Thus |120583| lt 1 if (9) holds This completes the proof
Remark 8 If 119902lowast = Ψminus1minus 1 a bifurcation may occur when
119902 = 119902lowast for |120583| = 1 whereas a positive periodic solution may
emerge if 119902 gt 119902lowast
Theorem 9 There exists a positive order-1 periodic solution tosystem (1) if 119902 gt 119902
lowast where the semitrivial periodic solution isorbitally unstable
Proof Because ℎ lt 119909lowast both119872 and119873 are in the left 1198642 The
trajectory that passes through point 119860 where 119860 = 119872 cap 119910 =
119891(119909) tangents to119872 at point 119860 and intersects 119873 at point 119861Thus there may be three possible cases for the phase point(119861+) for point 119861 as follows (see Figure 2(a))
Case 1 (119910119860= 119910
119861+) In this case it is obvious that 119860119861119860 is an
order-1 periodic solution
Case 2 (119910119860lt 119910
119861+)The point 119861+ is the order-1 successor point
of point 119860 so the order-1 successor function of point 119860 isgreater than zero that is 119865
1(119860) = 119910
119861+ minus 119910
119860gt 0 In addition
the trajectory with the initial point 119861+ intersects impulsiveset119873 at point 119862 and reaches 119862+ via the impulsive effect Dueto the disjointedness of the trajectory and impulsive line insystem (1) it is easy to see that point119862+ is located below point119861+ Therefore the successor function 119865
1(119861
+) lt 0 According
to Lemma 4 there exists a point 119866 isin 119872 such that 1198651(119866) = 0
hence there exists an order-1 periodic solution
Case 3 (119910119860
gt 119910119861+) According to 119910
119860gt 119910
119861+ the order-
1 successor point of point 119860 is located below point 119860 so1198651(119860) lt 0 If we suppose that 119901
0is a crossover point of
the semitrivial periodic solution and impulsive set becausethe semitrivial periodic solution is orbitally unstable then
6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
y
xM N
E2
B
B
+
B+
A
D
F
EC
C
(a)
y
x
xM N
E2
B
B
+
A
D
F
EC
C
B+
(b)
Figure 2 The proof of Theorems 9 and 10
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
119903minus119898119903
(
119870 minus ℎ
119870 minus (1 minus 119901) ℎ
)
2
12057811205782
1205781= (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
1205782= exp( minus 120576119886119870radic119887
119903 (119887 + 1198702)
times ( arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(12)
Therefore it is possible to obtain the Floquet multiplier 120583by direct calculation as follows
120583 =
119899
prod
119896=1
Δ119896
times exp [int119879
0
(
120597119875
120597119909
(120585 (119905) 120578 (119905)) +
120597119876
120597119910
(120585 (119905) 120578 (119905))) 119889119905]
= (1 + 119902)Ψ
(13)
Thus |120583| lt 1 if (9) holds This completes the proof
Remark 8 If 119902lowast = Ψminus1minus 1 a bifurcation may occur when
119902 = 119902lowast for |120583| = 1 whereas a positive periodic solution may
emerge if 119902 gt 119902lowast
Theorem 9 There exists a positive order-1 periodic solution tosystem (1) if 119902 gt 119902
lowast where the semitrivial periodic solution isorbitally unstable
Proof Because ℎ lt 119909lowast both119872 and119873 are in the left 1198642 The
trajectory that passes through point 119860 where 119860 = 119872 cap 119910 =
119891(119909) tangents to119872 at point 119860 and intersects 119873 at point 119861Thus there may be three possible cases for the phase point(119861+) for point 119861 as follows (see Figure 2(a))
Case 1 (119910119860= 119910
119861+) In this case it is obvious that 119860119861119860 is an
order-1 periodic solution
Case 2 (119910119860lt 119910
119861+)The point 119861+ is the order-1 successor point
of point 119860 so the order-1 successor function of point 119860 isgreater than zero that is 119865
1(119860) = 119910
119861+ minus 119910
119860gt 0 In addition
the trajectory with the initial point 119861+ intersects impulsiveset119873 at point 119862 and reaches 119862+ via the impulsive effect Dueto the disjointedness of the trajectory and impulsive line insystem (1) it is easy to see that point119862+ is located below point119861+ Therefore the successor function 119865
1(119861
+) lt 0 According
to Lemma 4 there exists a point 119866 isin 119872 such that 1198651(119866) = 0
hence there exists an order-1 periodic solution
Case 3 (119910119860
gt 119910119861+) According to 119910
119860gt 119910
119861+ the order-
1 successor point of point 119860 is located below point 119860 so1198651(119860) lt 0 If we suppose that 119901
0is a crossover point of
the semitrivial periodic solution and impulsive set becausethe semitrivial periodic solution is orbitally unstable then
6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
there exists a point 1198670isin cup(119901
0 120575) such that 119865
1(119867
0) gt 0
According to Lemma 4 there exists a point 1198700isin 119872 such
that 1198651(119870
0) = 0 Therefore there exists an order-1 periodic
solution in system (1)This completes the proof
312The Case 120591 gt 0 In this case we suppose that ℎ lt 119909lowast andthe following theorem is described
Theorem 10 There exists a positive order-1 periodic solutionfor system (1) if 120591 gt 0 and ℎ lt 119909lowast
Proof The method for this proof is similar to the methodfor Theorem 9 (see Figure 2(b)) The main difference is theproof for the case 119910
119860gt 119910
119861+ Suppose that point 119863 is a
crossover point for a semitrivial periodic solution and a phasesetThe trajectorywith initial point119863 intersects the impulsiveset at point 119864 Obviously 119910
119863= 119910
119864= 0 Because 120591 gt 0
119910119865= (1 + 119902)119910
119864+ 120591 gt 0 = 119910
119863 Thus there exists a positive
order-1 periodic solution for system (1) which completes theproof
Remark 11 If there exists a positive order-1 periodic solutionΓ for system (1) when ℎ lt 119909
lowast set point 119878 = Γ cap 119873 then119910119878lt 119910
119874
In summary system (1) has a stable semitrivial periodicsolution or a positive order-1 periodic solution when 120591 ge 0Furthermore using the analogue of the Poincare criterionthe stability of the positive order-1 periodic solution isobtained
Theorem 12 For any 120591 gt 0 119902 gt 0 or 120591 = 0 119902 ge 119902lowast the order-1periodic solution of system (1) is orbitally asymptotically stableif the following condition holds100381610038161003816100381610038161003816100381610038161003816
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902) exp(int119879
0
119866 (119905) 119889119905)
100381610038161003816100381610038161003816100381610038161003816
lt 1
(14)
where 119866(119905) = (120597119875120597119860)(120585(119905) 120578(119905)) + (120597119876120597119865)(120585(119905) 120578(119905))
Proof We suppose that the period of the order-1 periodicsolution is 119879 so the order-1 periodic solution intersects withthe impulsive set at 119875(ℎ 120578
0) and the phase set at 119875+((1 minus
119901)ℎ (1 + 119902)1205780+ 120591) Let (120585(119905) 120578(119905)) be the expression of
the order-1 periodic solution The difference between thiscase and the case in Theorem 7 is that (120585(119879) 120578(119879)) =
(ℎ 1205780)(120585(119879+) 120578(119879+)) = ((1 minus 119901)ℎ (1 + 119902)120578
0+ 120591) while the
others are the same Thus we have
Δ1=
119875 ((1 minus 119901) ℎ (1 + 119902) 1205780+ 120591)
119875 (ℎ 1205780)
(1 + 119902)
1205832= Δ
1exp(int
119879
0
119866 (119905) 119889119905)
(15)
According to condition (14) |1205832| lt 1 so the order-1 periodic
solution is orbitally stable according to the analogue of thePoincare criterion This completes the proof
Theorem 13 In system (1) if the conditions (1+119902)119910119874+120591 lt 119910
119867
and ℎ lt 119909lowast hold then the set Ω where Ω = [(1 minus 119901)ℎ ℎ] times
[0 119891(119909)](119909 isin [(1 minus 119901)ℎ ℎ]) is an attractor There is also noorder-119896 (119896 ge 2) periodic solution
Proof In the region Φ = (0 ℎ] times (0 +infin) forall(1199090 119910
0) isin Φ
there exists a time 1199051such that the trajectory 120593(119905 119909
0 119910
0) of
system (1) reaches the impulsive set119873 at point 119871 when 119905 = 1199051
and 119910119871lt 119910
119874 Via the impulsive effect the trajectory reaches
the phase set 119872 and then lim119905rarr+infin
inf 119909(119905) ge (1 minus 119901)ℎ inaddition lim
119905rarr+infinsup 119909(119905) le ℎ Because (1 + 119902)119910
119874+ 120591 lt
119910119867 (1 + 119902)119910
119871+ 120591 lt 119910
119867 Furthermore the trajectory of the
differential equation is not intersectant From system (1) weknow that the impulsive line is also not intersectant Thuslim
119905rarr+infinsup119910(119905) le 119891(119909) (119909 isin [(1 minus 119901)ℎ ℎ]) Therefore the
set Ω is a global attractor in the regionΦSupposing that there exists an order-119896 (119896 ge 2) periodic
solution to system (1) the initial point of the order-119896 periodicsolution must be above the point 119867 We set the initial pointas 119869 andthen 119910
119869gt 119910
119867 and we suppose that the 119896th point of
the order-119896 periodic solution that reaches the impulsive set ispoint 119885 Then (1 + 119902)119910
119885+ 120591 = 119910
119869and 119910
119885lt 119910
119874 However
(1 + 119902)119910119874+ 120591 lt 119910
119867 Therefore this is a contradiction Hence
there is no order-119896 (119896 ge 2) periodic solutionThis completes the proof
32 The Bifurcation
321 Transcritical Bifurcation In this subsection we discussthe bifurcation near the semitrivial periodic solution Thefollowing Poincare map 119875 is used
119910+
119896= (1 + 119902) 120590 (119910
+
119896minus1) (16)
where we choose section 1198780= (1 minus 119901)ℎ as a Poincare section
If we set 0 le 119906 = 119910+119896at a sufficiently small value the map can
be written as follows
119906 997891997888rarr (1 + 119902) 120590 (119906) equiv 119866 (119906 119902) (17)
Using Lemma 6 the following theorem can be obtained
Theorem 14 A transcritical bifurcation occurs when 119902 = 119902lowast
120591 = 0 Correspondingly system (1) has a stable positive periodicsolution when 119902 isin (119902lowast 119902lowast + 120575) with 120575 gt 0
Proof Thevalues of1205901015840(119906) and12059010158401015840(119906)must be calculated at119906 =0 where 0 le 119906 le 119906
0 In this case 119906
0= 119903(1 minus ℎ119870)(119887 + ℎ
2)119886ℎ
Thus system (1) can be transformed as follows
119889119910
119889119909
=
119876 (119909 119910)
119875 (119909 119910)
(18)
where 119875(119909 119910) = 119903119909(1 minus 119909119870) minus 1198861199092119910(119887 + 119909
2) 119876(119909 119910) =
1205761198861199092119910(119887 + 119909
2) minus 119898119910
Let (119909 119910(119909 1199090 119910
0)) be an orbit of system (18) and 119909
0=
(1 minus 119901)ℎ 1199100= 119906 0 le 119906 le 119906
0 Then
119910 (119909 (1 minus 119901) ℎ 119906) equiv 119910 (119909 119906)
(1 minus 119901) ℎ le 119909 le ℎ 0 le 119906 le 1199060
(19)
Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
Using (19)
120597119910 (119909 119906)
120597119906
= exp[int119909
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
) 119889119904]
1205972119910 (119909 119906)
1205971199062
=
120597119910 (119909 119906)
120597119906
int
119909
(1minus119901)ℎ
1205972
1205971199102(
119876 (119904 119910 (119904 119906))
119875 (119904 119910 (119904 119906))
)
120597119910 (119904 119906)
120597119906
119889119904
(20)
it can be deduced simply that 120597119910(119909 119906)120597119906 gt 0 and
1205901015840(0)
=
120597119910 (ℎ 0)
120597119906
= exp(intℎ
(1minus119901)ℎ
120597
120597119910
(
119876 (119904 119910 (119904 0))
119875 (119904 119910 (119904 0))
) 119889119904)
= exp(intℎ
(1minus119901)ℎ
(1205761198861199042 (119887 + 119904
2)) minus 119898
119903119904 (1 minus (119904119870))
119889119904)
= (
119870 minus (1 minus 119901) ℎ
(119870 minus ℎ) (1 minus 119901)
)
minus119898119903
times (
(119870 minus (1 minus 119901) ℎ)2(119887 + ℎ
2)
(119887 + ((1 minus 119901) ℎ)2) (119870 minus ℎ)
2)
12057611988611987022119903(119887+119870
2)
times exp( minus120576119886119870radic119887
119903 (1198702+ 119887)
times (arctan( (ℎ119870 + 119887)
radic119887 (119870 minus ℎ)
)
minus arctan(119870 (1 minus 119901) ℎ + 119887
radic119887 (119870 minus (1 minus 119901) ℎ)
)))
(21)
Thus 1205901015840(0) = ΨFurthermore
12059010158401015840(0) = 120590
1015840(0) int
ℎ
(1minus119901)ℎ
119898(119904)
120597119910 (119904 0)
120597119906
119889119904 (22)
where 119898(119904) = (1205972120597119910
2)(119876(119904 119910(119904 0))119875(119904 119910(119904 0))) =
(1205761198861199042(119887+119904
2))minus119898(119903119904(1 minus (119904119870)))
3 119904 isin [(1minus119901)ℎ ℎ] Because119904 le ℎ lt 119909
lowast it can be determined that 119898(119904) lt 0 119904 isin
[(1 minus 119901)ℎ ℎ] Therefore
12059010158401015840(0) lt 0 (23)
Thenext step is to checkwhether the following conditionsare satisfied
(a) It is easy to see that 119866(0 119902) = 0 119902 isin (0 infin)
(b) Using (21) 120597119866(0 119902)120597119906 = (1 + 119902)1205901015840(0) = (1 + 119902)Ψ
which yields 120597119866(0 119902lowast)120597119906 = 1Thismeans that (0 119902lowast)is a fixed point with an eigenvalue of 1 in map (16)
(c) Because (21) holds 1205972119866(0 119902lowast)120597119906120597119902 = 1205901015840(0) gt 0(d) Finally inequality (23) implies that 1205972119866(0 119902lowast)1205971199062 =
(1 + 119902lowast)120590
10158401015840(0) lt 0
These conditions satisfy the conditions of Lemma 6 Thiscompletes the proof
In the region Φ = (0 ℎ] times (0 +infin) 119889119910119889119905 lt 0 alwaysholds Thus forall(119909
0 119910
0) isin Φ the trajectory 120593(119909 119909
0 119910
0) first
intersects the phase set 119872 at point 120588 and the impulsive set119873 at point 120587 respectively then 119910
120587lt 119910
120588 Therefore there is
always a certain pair of (119902 120591) such that 119910120588= (1 + 119902)119910
120587+ 120591
for 119902 gt 0 120591 ge 0 Thus in the region Φ there exists anorder-1 periodic solution in system (1) In addition the order-1 periodic solution is unique when the initial point of theorder-1 periodic solution in the phase set is above point 119867This is obvious because of the disjointedness of the trajectoryof the differential equation
322 The Bifurcation of the Order-1 Periodic Solution In thissubsection we discuss the bifurcation of an order-1 periodicsolution with variable parameters The following theorem isrequired
Theorem 15 The rotation direction of the pulse line is clock-wise when 119902 changes from 119902 = 0 to 119902 gt 0
Proof Let 120579 be the angle of the pulse line and the x-axis Then tan 120579 = Δ119910Δ119909 = 120573(119909 119910)120572(119909 119910) so 120579 =
tanminus1(120572(119909 119910)120573(119909 119910)) Furthermore 120597120579120597119902 = (1(1205722+
1205732))
10038161003816100381610038161003816
120572 120573
120597120572120597119902 120597120573120597119902
10038161003816100381610038161003816= 1(120572
2+ 120573
2)(minus119901119909119910) lt 0 Therefore 120579 is
a monotonically decreasing function of 119902 This completes theproof
The existence of an order-1 periodic solution was provedin the previous analysis so we assume that there exists anorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1and 120591 ge 0 where
the crossover points of Γlowastfor119872 and 119873 are points 119877 and 119885
respectively Thus the following theorem can be stated
Theorem 16 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
1 120591 gt 0 and 119910
119877gt 119910
119867
then there exists a unique order-1 periodic solution Γlowastlowast
insidethe order-1 periodic solution Γ
lowastwhen 119902 = 119902
1minus 120599 if 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowast
is orbitally asymptotically stable
Proof The order-1 periodic solution breaks when 119902 changes(see Figure 3(a)) According to Theorem 15 point 119861
1 which
is the phase point of point 119885 is located below point 119877 when119902 = 119902
1minus 120599 and 120599 gt 0 is sufficiently small Because 119910+ =
119910 + 119902119910 + 120591 (in this case 119910 gt 0) is a monotonically increasingand continuing function of 119902 there exists 120599
1gt 0 such that
1199101198621
lt 119910119867lt 119910
1198611
lt 119910119877when 119902 = 119902
1minus120599
1 Figure 3(a) shows that
point 1198611is the order-1 successor point of point 119877 while point
1198601is the order-1 successor point of point 119861
1 so 119865
1(119877) lt 0
8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
y
xNM
Z
D1
E1
C1
R
A1
B1
(a)
y
B2
A2
C2
D
S2
G2
E2
H2
xNM
(b)
Figure 3 The proof of Theorem 16
1198651(119861
1) gt 0Therefore there exists a point119870
1between point119877
and 1198611such that 119865
1(119870
1) = 0 According to the disjointedness
of the differential trajectories the order-1 periodic solutionΓlowastlowast
is inside the order-1 periodic solution 1198771198621119885119877
Next the orbital stability can be established based on thefollowing proof (see Figure 3(b))
The order-1 periodic solution 1198771198621119885119877 is orbitally asymp-
totically stable so according to the disjointedness of thepulse line there exists a point 119878 between point 119877 and119867 suchthat 119865
1(119878) gt 0 119865
2(119878) gt 0 We suppose that the reduction in
1199021is 120599 gt 0If 120599 = 0 point 119861
2is the order-1 successor point of point 119878
andpoint1198632is the order-2 successor point of point 119878 Because
of 1199101198612
= (1 + 1199021)119910
1198662
+ 120591 1199101198632
= (1 + 1199021)119910
1198672
+ 120591 1198651(119878) =
1199101198612
minus 119910119878= (1 + 119902
1)119910
1198662
+ 120591 minus 119910119878gt 0 119865
2(119878) = 119910
1198632
minus 119910119878=
(1 + 1199021)119910
1198672
+ 120591 minus 119910119878gt 0
If 120599 gt 0 the order-1 and order-2 successor points of point119878 are points 119860
2and 119862
2 respectively where 119910
1198602
= (1 + 1199021minus
120599)1199101198662
+ 120591 1199101198622
= (1 + 1199021minus 120599)119910
1198642
+ 120591 Therefore 1198651(119878) =
1199101198602
minus 119910119878= (1 + 119902
1minus 120599)119910
1198662
+ 120591 minus 119910119878 119865
2(119878) = 119910
1198622
minus 119910119878= 120591 minus
119910119878+ (1+119902
1minus 120599)119910
1198642
and in order to distinguish the successorfunctions between 120599 = 0 and 120599 gt 0 we set 119865
1(119878) = 119865
1
1(119878) and
1198652(119878) = 119865
2
2(119878)
Therefore we have the following 11986511(119878) = (1+119902
1minus120599)119910
1198662
+
120591minus119910119878= (1+119902
1)119910
1198662
+120591minus119910119878minus120599119910
1198662
because (1+1199021)119910
1198662
+120591minus119910119878gt
0 so 11986511(119878) gt 0when 0 lt 120599 lt ((1+119902
1)119910
1198662
+120591minus119910119878)119910
1198662
define997888997888997888997888rarr
12059911In addition
1198652(119878) minus 119865
2
2(119878)
= (1 + 1199021) 119910
1198672
+ 120591 minus 119910119878minus (1 + 119902
1minus 120599) 119910
1198642
minus 120591 + 119910119878
(24)
Obviously 1198652(119878) minus 119865
2
2(119878) lt 0 when 0 lt 120599 lt (1 +
119902lowast)(119910
1198642
minus 1199101198672
)1199101198672
define997888997888997888997888rarr 120599
22 where 119910
1198642
gt 1199101198672
from
Figure 3(b) If we set 120599lowast = min(12059911 120599
22) then 1198651
1(119878) gt 0
and 11986522(119878) gt 0 when 120599 isin (0 120599
lowast) Next we will prove that
the trajectory initialization point 119878 is attracted by Γlowastlowast We set
119889119899= 119865
2119899minus1
2119899minus1(119878) minus 119865
2119899
2119899(119878)(119899 isin 119873) where 1198652119899
2119899(119878) denotes the
order-2n successor of point 119878Because 1198651
1(119878) gt 0 and 1198652
2(119878) gt 0 the following results
hold
1198651
1(119878) gt 119865
3
3(119878) gt sdot sdot sdot gt 119865
2119899minus1
2119899minus1(119878) (25a)
1198652
2(119878) lt 119865
4
4(119878) lt sdot sdot sdot lt 119865
2119899
2119899(119878) (25b)
1198652119899minus1
2119899minus1(119878) gt 119865
2119899
2119899(119878) (25c)
0 lt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (25d)
When 119899 = 1 2 3 the expression (25a) (25b) (25c) (25d)obviously holds Suppose that (25a) (25b) (25c) (25d) holdswhen 119899 = 119895 Now we set 119899 = 119895 + 1 For the trajectoryinitialization point order-2119895 minus 1 successor point of point 119878its order-1 successor point is the order-2119895 successor pointof point 119878 its order-2 successor point is the order-2119895 + 1
successor point of point 119878 and its order-3 successor pointis the order-2119895 + 2 successor point of point 119878 Thus it isobvious that 1198652119895minus1
2119895minus1gt 119865
2119895+1
2119895+1 1198652119895
2119895lt 119865
2119895+2
2119895+2 1198652119895+1
2119895+1(119878) gt 119865
2119895+2
2119895+2(119878)
and 119889119895+1
lt 119889119895 Therefore (25a) (25b) (25c) (25d) holds
Moreover based on 0 lt 119889119899= 120572
119899minus1119889119899minus1
(0 lt 120572119899lt 1) it is
known that 119889119899= 120572
1 120572
119899minus11198891 Because 0 lt 120572
119899lt 1 then
lim119899rarr+infin
119889119899= 0 Thus 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin where
120587(119905 119878) is the trajectory initialization point 119878 in system (1)Similarly if119910
119878gt 119910
119877 then there exist 120599
lowastlowastsuch that1198651
1(119878) lt
0 and 11986522(119878) lt 0 when 120599 isin (0 120599
lowastlowast) The following results
hold
1198651
1(119878) lt 119865
3
3(119878) lt sdot sdot sdot lt 119865
2119899minus1
2119899minus1(119878) (26a)
Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
1 2 3 4
012
010
008
y
x
q = 01
q = 001
(a)
0
0
2
4
6
8
01 02 0403
y
q
q = 00456
(b)
Figure 4 (a) Trajectories based on the initial point (05 01) in system (1) where the black symbol denotes the initial point (05 01) the redcurve denotes the trajectory when 119902 = 01 the blue curve denotes the trajectory when 119902 = 001 and the arrow denotes the direction of thetrajectory (b) Bifurcation diagram of system (1) where the red symbol denotes the bifurcation point the dashed line implies the instabilityof the semitrivial solution and the black solid line represents the maximum value of population 119910 which is stable where 119901 = 08 120591 = 0
1198652
2(119878) gt 119865
4
4(119878) gt sdot sdot sdot gt 119865
2119899
2119899(119878) (26b)
1198652119899
2119899(119878) gt 119865
2119899minus1
2119899minus1(119878) (26c)
0 gt 119889119899= 120572
119899minus1119889119899minus1 (0 lt 120572
119899lt 1) (26d)
Then 120587(119905 119878) rarr Γlowastlowast 119905 rarr +infin where 120587(119905 119878) is the
trajectory initialization point 119878 in system (1)Similarly using the disjointedness of the trajectory of the
differential equation and the impulsive line we set 119878lowastas the
arbitrary point between point119877 and point 119878 in phase line andwe can prove 120587(119905 119878) rarr Γ
lowastlowast 119905 rarr +infin Thus Γ
lowastlowastis orbitally
attractiveBecause Γ
lowastlowastis unique and orbitally attractive there exists
a 1198790such that 120588(120587(119905 119901
0) Γ
lowastlowast) lt 120576
0for forall120576
0gt 0 and 119901
0isin
119872(1199010gt 119910
119867) set 119901
lowastlowast= Γ
lowastlowastcap 119872 In addition there must
be a 1198791ge 119879
0 such that 120587(119879
1 119901
0) = 120587(119879
1 119901
0) cap 119872 if we set
120587(1198791 119901
0) = 119901
1We arbitrarily take the point119901
2between point
119901lowastlowast
and point1199011 then 120588(120587(119905 119901
2) Γ
lowastlowast) lt 120576
0when 119905 ge 119905
0 If
we set 120575 = |1199101199011
minus 119910119901lowastlowast
| clearly only 120575 is determined by 1205760
Therefore forall1205760gt 0 exist120575(120576
0) such that 120588(120587(119905 119901) Γ
lowastlowast) lt 120576
0for
forall119901 isin 119880(119901lowastlowast 120575) when 119905 ge 119905
0 Thus Γ
lowastlowastis orbitally stable
Then Γlowastlowast
is orbitally asymptotically stableThis completes the proof
Note 1 Theorem 16 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 lt 119902
1
Similar to the method used for the proof of Theorem 16the following theorem exists (the proof is omitted)
Theorem 17 In system (1) supposing that there exists anorder-1 periodic solution when 119902 = 119902
2 120591 ge 0 and 119910
119877lt 119910
119867
then there exists an order-1 periodic solution Γlowastlowastlowast
inside theorder-1 periodic solution Γ
lowastwhen 119902 = 119902
1+ 120599 where 120599 gt 0 is
sufficiently small In addition if Γlowastis orbitally asymptotically
stable then Γlowastlowastlowast
is orbitally stable at least
Note 2 Theorem 17 means that an order-1 periodic solutionmoves toward the inside of the order-1 periodic solution Γ
lowast
along the phase set and the impulsive set when 119902 changesappropriately from 119902 = 119902
1to 119902 gt 119902
1
4 Numerical Simulation and Analysis
In this section numerical simulations are presented thatverify the correctness of the theoretical results In particularusing these results we analyze the feasibility of the artificialand biological methods and the role of the controlling factoris also discussed The zooplankton population in the originalmodel was replaced with a fish population in our model[2] but the parameter values used were still those from theprevious study [2] that is 119903 = 03day 119870 = 108 120583gL119886 = 07day 119887 = 3249 120583gL 120576 = 005 and 119898 = 0012dayTherefore 119864
2= (119909
lowast 119910
lowast) asymp (41172 49503) which is a
stable focus Thus ℎ = 38 120583gL was assumed
41 Numerical Simulation In this subsection assuming that119901 = 08 the semitrivial solution of system (1) is described asfollows
119909 (119905) =
8208 exp (03119905 minus 1638119899)10724 + 076 exp (03119905 minus 1638119899)
119910 (119905) = 0
(27)
10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
10
20
30
1 2 3 4M
x
y
N
(a)
10
0 300 600 900
20
30
M
N
x
t
y
(b)
Figure 5 (a) An order-1 periodic solution to system (1) (b)The time-series that corresponds to the order-1 periodic solution where the bluecurve denotes population 119910 and the red curve denotes population 119909 (119902 = 1 120591 = 0 119901 = 08)
where 119905 isin (546119899 546(119899 + 1)] 119899 isin 119873 and the period119879 asymp 546 day According to Theorem 7 the semitrivialsolution is orbitally asymptotically stable when 0 lt 119902 lt
00456 From Theorem 14 a transcritical bifurcation occurswhen 119902 = 119902
lowastasymp 00456 that is the semitrivial solution is
unstable when 119902 ge 119902lowast Thus an order-1 periodic solution
appears Figure 4 verifies the correctness of these results InFigure 4(a) the trajectory is far from the semitrivial solution(red curve) when 119902 = 01 gt 119902
lowast while the trajectory
converges towards the semitrivial solution (blue curve) when119902 = 001 lt 119902
lowast where their initial points are the same In
Figure 4(b) we can see that a transcritical bifurcation occurswhen 119902 asymp 00456 When 0 lt 119902 lt 00456 the semitrivialsolution is stable If 119902 gt 00456 however an order-1 periodicsolution emerges that coexists with the semitrivial solutionHowever the semitrivial solution is unstable whereas theorder-1 periodic solution is stable
According to Theorems 9 and 12 there should be anorder-1 periodic solution to system (1) when 120591 gt 0 or 120591 =
0 and 119902 gt 00456 This is shown in Figures 5 and 6(a)Figure 5 shows an order-1 periodic solution when 119902 = 1 and120591 = 0 Figure 5(a) is the phase diagram and Figure 5(b) isthe time series plot with respect to Figure 5(a) In Figure 5we can see that population 119910 reaches its minimum valuewhen population 119909 reaches its maximum value Howeverpopulation 119909 does not reach its minimum value whenpopulation 119910 reaches its maximum value In Figure 5(b)when population 119910 reaches its maximum value population 119909reaches the value represented by the cyan line which is clearlynot the minimum value
Figure 6(a) shows that there exists an order-1 periodicsolution to system (1) when 120591 = 08 and 119902 = 1 In Figure 6(a)the black trajectory is an order-1 periodic solutionThe yellowcurve is the trajectory of system (1) Clearly these trajectories
are attracted by the order-1 periodic solutionThe trajectoriesof the differential equation do not meet each other in system(1) so Figure 6(a) implies that the order-1 periodic solutionis orbitally stable Thus the proof of Theorem 16 where theorder-1 periodic solution is orbitally asymptotic stable if atrajectory of system (1) is attracted by an order-1 periodicsolution is correct From 119891(ℎ)(1 + 119902) + 120591 = 119891((1 minus 119901)ℎ)we can obtain 119902 asymp 2625 when 120591 = 0 Thus accordingto Theorem 14 there exists an attractor in system (1) when119902 lt 2625 Figure 6(b) shows an attractor of system (1) where119902 = 0005
From Theorems 16 and 17 there is an order-1 periodicsolution when 119902 = 119902
1 while an order-1 periodic solution
splits away from the order-1 periodic solutionwhen 119902 gt 1199021 In
Figure 7(a) when 1199021= 10 the ordinate of the order-1 periodic
119910119877asymp 55 gt 185 asymp 119910
119867 Thus according to Theorem 16 there
exists a unique order-1 periodic solution inside the order-1periodic solution when 119902 = 119902
1minus 120599 We set 120599 as equal to
2 and 5 respectively The results are shown in Figure 7(a)From the expression 119902 = 119902
1minus 120599 and Theorem 16 an order-
1 periodic solution moves toward the inside of the order-1periodic solution along the phase set and the impulsive setwhen 119902 changes appropriately from 119902 = 119902
1to 119902 lt 119902
1 This is
shown clearly in Figure 7(a) Figure 7(b) shows the validity ofTheorem 17 where 119910
119877asymp 9 lt 185 asymp 119910
119867 120591 = 01
These numerical simulations prove that the theoreticalresult is correct Next we analyze the feasibility of anapproach including artificial and biological methods usingthe theoretical results and the numerical simulation
42 Numerical Analysis The question we need to answeris whether artificial and biological methods can controlphytoplankton blooms We also need to know which methodis better Figure 8 illustrates the difference In Figure 8(a)
Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 11
12
9
6
3
0
y
0 1 2 3 4
x
M N
(a)
0
0
2
4
6
8
10
1 2 3 4
x
M N
y
(b)
Figure 6 (a) The black curve denotes an order-1 periodic solution to system (1) where the yellow curve denotes the trajectory in system (1)and the black symbol denotes the initial point 120591 = 08 119902 = 1 119901 = 08 (b)The region that comprises the red line blue line and black curve isan attractor in system (1) where the green curve denotes the trajectory of system (1) and the black symbol denotes the initial point 119902 = 0005120591 = 0 119901 = 08
20
20
40
4M
x
y
N
q = 10
q = 8
q = 5
(a)
q = 12
q = 1
q = 08
6
8
10
y
1 2 3 4M
x
N
(b)
Figure 7 Bifurcation of an order-1 periodic solution (a) 119910119877asymp 55 gt 185 asymp 119910
119867 119901 = 08 120591 = 0 (b) 119910
119877asymp 9 lt 185 asymp 119910
119867 119901 = 08 120591 = 01
only the biological method is considered where the red curvecorresponds to the right vertical axis while the blue curveand the green curve correspond to the left vertical axis wherethe initial densities of phytoplankton and fish are 3120583gL and5 120583gL respectively In Figure 8(a) when 119902 equals 2 and 5respectively the biological method alone cannot control thegrowth of phytoplanktonWhen the density of phytoplanktonis below the critical value ℎ phytoplankton blooms occurWhen 119902 = 40 the growth of phytoplankton is controlled
However the density of fish released is 40 times the existingdensity of fish but we do not knowwhether all of the releasedfish can be accommodated by the current environment Inaddition when 119902 = 40 we find that blooms occur from the200th day in Figure 8(a)
In Figure 8(b) only the artificial method is consideredand the initial densities of the phytoplankton and fishare 3 120583gL and 5 120583gL respectively Clearly the density ofphytoplankton remains below the critical value ℎ because of
12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Discrete Dynamics in Nature and Society
99
66
33
0 100 200
1
2
3
x
t
x
q = 2
q = 5
q = 40
(a)
0 600200 400
t
3
2
1
x
(b)
0 600200 400
t
3
4
2
1
xq = 10 q = 20
(c)
Figure 8 Time-series of system (1) (a) Only with the biological method 119901 = 0 120591 = 0 (b) only with the artificial method 119902 = 0 120591 = 0 (c)with the biological and artificial methods 119901 = 08 120591 = 0 where the red curve denotes the case without control
artificial control However too many phytoplankton bloomsoccur within 600 days Figure 8(b) shows that too muchartificial control is required when only the artificial methodis used Indeed if the density of fish is much lower andcertain conditions are satisfied such as the nutrient levels andsufficient illumination phytoplankton blooms occur againafter several days of artificial control These phenomena havebeen observed in reality
In Figure 8(c) both the artificial and biological methodsare considered where the initial densities of phytoplanktonand fish are 3120583gL and 5 120583gL respectively and 119901 = 08 Thered curve represents the change in the phytoplankton densitywithout artificial and biological control From Figure 8(c) itis clear that the density of phytoplankton remains above thecritical value ℎ several times during the 600-day period whenthe artificial and biological methods are not implementedFigure 8(c) shows that a phytoplankton bloom occurs threetimeswhen 119902 = 10 and twice in about 500 daysWhen 119902 = 20there are two phytoplankton blooms with one in about 500
days Compared with Figures 8(a) and 8(b) it is clear that theresults shown in Figure 8(c) are much better Thus both theartificial and biological methods should be used
According to Theorem 7 when 0 lt 119902 lt 119902lowast the
semitrivial periodic solution is orbitally asymptotically stableFrom Figure 4(a) however we find that the time interval ofphytoplankton blooms is much shorter when 0 lt 119902 lt 119902
lowast
This suggests that too much artificial control is neededThus119902 should be larger than 119902
lowastand the value of 119902
lowastwith respect to
119901 and ℎ is given in Figure 9(a) In addition fromTheorem 14when 0 lt 119902 lt ((119870 minus (1 minus 119901)ℎ)(119887 + ((1 minus 119901)ℎ)
2)(1 minus
119901)(119870 minus ℎ)(119887 + ℎ2)) minus (119886119870ℎ120591119903(119870 minus ℎ)(119887 + ℎ
2)) minus 1
define997888997888997888997888rarr 119902
+
there exists an attractor in system (1) In Figure 6(b) whenartificial and biological controls are implemented althoughthe phytoplankton blooms are contained the density ofphytoplankton still increases because the released fish cannotcontrol the growth of phytoplankton In Figure 7(a) thereleased fish controlled the growth of phytoplankton onlywhen the value of 119902 is beyond a certain value Indeed
Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 13
01
005
0
0906
03
1
2
3
4
p
h
q
(a)
20
10
0
q
0906
03p
1
2
3
4
h
(b)
0 2 4 6 8 10
q
240
160
80
0
T
(c)
Figure 9 (a) Relationship between 119902lowastwith respect to 119901 and ℎ fromTheorem 7 120591 = 0 (b) The relationship between 119902
+with respect to 119901 and
ℎ fromTheorem 14 120591 = 0 (c) The relationship of the time interval between two controls with respect to 119902 119901 = 08 ℎ = 38 120591 = 0
from Theorem 14 we know that the value is 119902+ Figure 9(b)
shows the relationships among the value 119902+ 119901 and ℎ The
released fish always controlled the growth of phytoplanktonwithin a certain period of time when 119902 gt 119902
+ We set the
values of ℎ 120591 and 119901 to 38 120583gL 0 120583gL and 08 120583gLrespectivelyThe relationship between 119902 and the average timeinterval 119879 which is the time between two implementedcontrols is shown in Figure 9(c) for 1000 days where theinitial densities of phytoplankton and fish are 3 120583gL and 5120583gL respectively Figure 9(c) shows that the time interval119879 also increases when 119902 increases that is the frequency ofphytoplankton blooms decreases with increased biologicalcontrol Indeed according to Theorems 16 and 17 the order-1 periodic solution moves the phase set and the impulsemoves from the bottom to top with the increase in 119902 If theorder-1 periodic solution is stable the trajectorywill convergetoward the order-1 periodic solution It is clear that the timerequired to reach 119909 = ℎ increases which is exactly whatwe hoped Thus phytoplankton blooms can be controlledusing artificial and biologicalmethods togetherTherefore weshould replace the artificial method with biological methodsas much as possible This is feasible according to a previousanalysis
5 Conclusion and Discussion
In this study we developed a phytoplankton-fish model withartificial and biological control which we studied analyticallyand numerically To investigate the feasibility of artificial andbiological methods theoretical mathematical results wererequired Thus we studied the existence and stability of asemitrivial periodic solution and an order-1 periodic solutionof system (1) initially and we proved that a positive periodicsolution emerged from the semi-trivial periodic solution viatranscritical bifurcation using bifurcation theory In additionwe discussed the bifurcation of an order-1 periodic solutionWe proved that an order-1 periodic solution emerged fromthe existing order-1 periodic solution These results are veryuseful when studying the biological and artificial control ofphytoplankton blooms We also described several numericalsimulations which verified the theoretical results
Based on previous theoretical and numerical resultswe showed that phytoplankton blooms can be controlledusing artificial and biological methods In particular wedemonstrated the feasibility of amethodwhere asmany fishesas possible are released and as little phytoplankton is removedas possible that is the artificial method should be replaced
14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Discrete Dynamics in Nature and Society
by biological methods as much as possible However theresults were not very good when we only used a biologicalmethod Likewise if only the artificial method was usedtoo much artificial control was required Thus our studydemonstrated that artificial and biological methods shouldbe used that is integrated management Furthermore wesuggest that fish (or zooplankton) should be released whenthe density of phytoplankton reaches a critical biologicalvalue Moreover when the density of phytoplankton reachesthe bloomrsquos critical value phytoplankton should be removedusing the artificial method The results may be better usingthis approach The corresponding theoretical results wereobtained using the method proposed in the present study
Although ourmodel is simple and it can only abstract realworld phenomena the model reproduced many real-worldfeatures First when only artificial method is considered inour model the density of phytoplankton can be restrainedIn reality artificial method is the main method controllingphytoplankton bloom at present so the method is effectiveSecond when only biological method is considered in ourmodel the density of phytoplankton cannot be below criticalvalue right now In reality when phytoplankton bloomoccurs biological method is hardly applied Third in recentyears people control phytoplankton bloom occurs usingfish-farming When phytoplankton bloom occurs peopleremove the phytoplankton using chemical reagentThe resultis better While our model shows that adopting biologicalmethod and artificial method at the same is much betterFurthermore our model predicts that the intensity of bio-logical method and artificial method is beyond a certainlevelthen the phytoplankton bloom can be controlled Basedon the analysis of our model we can obtain many results thatagreed with realityThese results are expected to be useful forstudying algae in Zeya Reservoir and other ecosystems
Conflict of Interests
The authors declare that they have no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (Grant no 31170338) by the KeyProgram of Zhejiang Provincial Natural Science Foundationof China (Grant no LZ12C03001) and by the National KeyBasic Research Program of China (973 Program Grant no2012CB426510)
References
[1] R Reigada R M Hillary M A Bees J M Sancho andF Sagues ldquoPlankton blooms induced by turbulent flowsrdquoProceedings of the Royal Society B vol 270 no 1517 pp 875ndash8802003
[2] J E Truscott and J Brindley ldquoOcean plankton populations asexcitable mediardquo Bulletin of Mathematical Biology vol 56 no5 pp 981ndash998 1994
[3] M Sandulescu C Lopez and U Feudel ldquoPlankton blooms invortices the role of biological and hydrodynamic timescalesrdquoNonlinear Processes in Geophysics vol 14 no 4 pp 443ndash4542007
[4] A Huppert B Blasius R Olinky and L Stone ldquoA model forseasonal phytoplankton bloomsrdquo Journal of Theoretical Biologyvol 236 no 3 pp 276ndash290 2005
[5] P Almeida Machado ldquoDinoflagellate blooms on the BrazilianSouth Atlantic coastrdquo in Toxic Dinoflagellate Blooms Taylor andSeliger Ed p 29 Elsevier Amsterdam The Netherlands 1978
[6] P Wu Z M Yu G P Yang and X X Song ldquoRemediation fromharmful algae bloom with organo-clay processed surfactantrdquoOceanologia et Limnologia Sinica vol 37 no 6 pp 511ndash5162006
[7] J K Liu andP Xie ldquoUnraveling the enigma of the disappearanceof water bloom from the east lake (Lake Donghu) of WuhanrdquoResources and Environment in the Yangtze Basin vol 8 no 3pp 312ndash319 1999
[8] F L R M Starling ldquoControl of eutrophication by silver carp(Hypophthalmichthys molitrix) in the tropical Paranoa Reser-voir (Brasılia Brazil) a mesocosm experimentrdquo Hydrobiologiavol 257 no 3 pp 143ndash152 1993
[9] A D Carruthers et al Effect of Silver Carp on Blue-GreenAlgal Blooms in Lake Orakai vol 68 of Fisheries EnvironmentalReport Ministry of Agriculture and Fisheries Wellington NewZealand 1986
[10] H Leventer and B Teltsch ldquoThe contribution of silver carp(Hypophthalmichthys molitrix) to the biological control ofNetofa reservoirsrdquoHydrobiologia vol 191 no 1 pp 47ndash55 1990
[11] T Miura ldquoThe effects of planktivorous fishes on the planktoncommunity in a eutrophic lakerdquoHydrobiologia vol 200-201 no1 pp 567ndash579 1990
[12] V Lakshmikantham D D Bainov and P S Simeonov Theoryof Impulsive Differential Equations vol 6 World ScientificSingapore 1989
[13] D D Bainov and P S Simeonov Impulsive Differential Equa-tions Asymptotic Properties of the Solutions World ScientificSingapore 1993
[14] D D Bainov and V C Covachev Impulsive DifferentialEquations with a Small Parameter vol 24 World ScientificSingapore 1994
[15] C J Dai M Zhao and L S Chen ldquoComplex dynamic behaviorof three-species ecological model with impulse perturbationsand seasonal disturbancesrdquo Mathematics and Computers inSimulation vol 84 pp 83ndash97 2012
[16] L S Chen ldquoPest control and geometric theory of semi-dynamical systemsrdquo Journal of BeihuaUniversity vol 12 pp 1ndash92011
[17] C J Dai M Zhao and L S Chen ldquoDynamic complexity of anIvlev-type prey-predator system with impulsive state feedbackcontrolrdquo Journal of Applied Mathematics vol 2012 Article ID534276 17 pages 2012
[18] W B Wang J H Shen and J J Nieto ldquoPermanence andperiodic solution of predator-prey system with holling typefunctional response and impulsesrdquoDiscrete Dynamics in Natureand Society vol 2007 Article ID 81756 15 pages 2007
[19] C J Dai M Zhao and L S Chen ldquoHomoclinic bifurcationin semi-continuous dynamic systemsrdquo International Journal ofBiomathematics vol 5 no 6 pp 1ndash19 2012
[20] L N Qian Q S Lu Q Meng and Z Feng ldquoDynamicalbehaviors of a prey-predator system with impulsive controlrdquo
Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 15
Journal of Mathematical Analysis and Applications vol 363 no1 pp 345ndash356 2010
[21] H Baek ldquoExtinction and permanence of a three-species Lotka-Volterra system with impulsive control strategiesrdquo DiscreteDynamics in Nature and Society vol 2008 Article ID 75240318 pages 2008
[22] C J Dai and M Zhao ldquoMathematical and dynamic analysis ofa prey-predator model in the presence of alternative prey withimpulsive state feedback controlrdquo Discrete Dynamics in Natureand Society vol 2012 Article ID 724014 19 pages 2012
[23] D L deAngelis S M Bartell and A L Brenkert ldquoEffects ofnutrient recycling and food-chain length on resiliencerdquo TheAmerican Naturalist vol 134 no 5 pp 778ndash805 1989
[24] A M Edwards ldquoAdding detritus to a nutrient-phytoplankton-zooplankton model a dynamical-systems approachrdquo Journal ofPlankton Research vol 23 no 4 pp 389ndash413 2001
[25] T Wyatt and J Horwood ldquoModel which generates red tidesrdquoNature vol 244 no 5413 pp 238ndash240 1973
[26] S Uye ldquoImpact of copepod grazing on the red tide flagellateChattonella antiquardquo Marine Biology vol 92 no 1 pp 35ndash431986
[27] S A Levin and L A Segel ldquoHypothesis for origin of planktonicpatchinessrdquo Nature vol 259 no 5545 p 659 1976
[28] G Pan M M Zhang H Yan H Zou and H Chen ldquoKineticsand mechanism of removing Microcystis aeruginosa using clayflocculationrdquo Environmental Science vol 24 no 5 pp 1ndash102003
[29] H Zou G Pan and H Chen ldquoFlocculation and removal ofwater bloom cellsMicrocystis aeruginosa by Chitosan-ModifiedClaysrdquo Environmental Science vol 25 no 6 pp 40ndash43 2004
[30] P S Simeonov and D D Bainov ldquoOrbital stability of periodicsolutions of autonomous systems with impulse effectrdquo Interna-tional Journal of Systems Science vol 19 no 12 pp 2561ndash25851988
[31] S N Rasband Chaotic Dynamics of Nonlinear Systems JohnWiley amp Sons New York NY USA 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

![Environmental Protection Division...marine aquatic ecosystem, including phytoplankton, zooplankton, benthos, macrophytes and fish. “aquatic life water use” [AW] means the use of](https://img.pdfslide.us/doc/110x75/600a50d3a2bb500f19706d9f/environmental-protection-division-marine-aquatic-ecosystem-including-phytoplankton.jpg)