Embed Size (px)
Citation preview

Research ArticleDynamic Analysis and Design Optimization of Series HydraulicHybrid System through Power Bond Graph Approach
R. Ramakrishnan, Somashekhar S. Hiremath, and M. Singaperumal
Precision Engineering and Instrumentation Laboratory, Department of Mechanical Engineering,Indian Institute of Technology Madras, Chennai-600036, India
Correspondence should be addressed to Somashekhar S. Hiremath; [email protected]
Received 30 September 2013; Revised 25 December 2013; Accepted 26 December 2013; Published 1 April 2014
Academic Editor: Tang-Hsien Chang
Copyright © 2014 R. Ramakrishnan et al. This is an open access article distributed under the Creative Commons AttributionLicense, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properlycited.
The availability of natural gas and crude oil resources has been declining over the years. In automobile sector, the consumption ofcrude oil is 63% of total crude oil production in the world. Hence, automobile industries are placing more emphasis on energyefficient hydraulic hybrid systems, which can replace their conventional transmission systems. Series hydraulic hybrid system(SHHS) is a multidomain mechatronics system with two distinct power sources that includes prime mover and hydropneumaticaccumulator. It replaces the conventional transmission system to drive the vehicle. The sizing of the subsystems in SHHS playsa major role in improving the energy efficiency of the vehicle. In this paper, a power bond graph approach is used to model thedynamics of the SHHS.The obtained simulation results indicate the energy flow during variousmodes of operations. It also includesthe dynamic response of hydropneumatic accumulator, prime mover, and system output speed. Further, design optimization of thesystem is carried out to optimize the process parameters for maximizing the system energy efficiency. This leads to increase in fueleconomy and environmentally friendly vehicle.
1. Introduction
The transportation sector consumes 63% of world crude oilproduction and causes 17% of total environmental pollutionacross the world. In this scenario, high cost and shortageof crude oil have created a need for energy saving, efficient,and environmental friendly transport system [1]. To mitigatethis situation, a hybrid system technology was adopted todevelop an energy efficient transportation vehicle. This sys-tem consists of two distinct power sources and kinetic energyrecovery technology, whichmakes this technology a potentialsolution for the design of energy efficient transmission. Thepossible combinations of two distinct power sources are gaso-line/hydraulic (hydraulic hybrid), gasoline/electric (electrichybrid), and fuel cell/battery (fuel cell hybrid). Typically,one source converts the fuel into energy and another sourceis a storage unit. During mechanical friction braking in aconventional vehicle, kinetic energy in the wheel is lost asheat energy. However, hybrid system has the capability toregenerate the kinetic energy into useful energy through amethod called regenerative braking.Thus, the hybrid systems
turn out to be a hot topic for researchers in automotivecompanies and research institutes all over the world [2, 3].
Generally, these systems can be classified into two catego-ries—electric hybrids and hydraulic hybrids. The electrichybrid system is the most common and commercially avail-able hybrid system in the market such as Honda Insight,Toyota Prius, Ford Escape, and so forth. An electric batteryis a major sub-subsystem in an electric hybrid vehicle, whichstores the regenerated energy and delivers the same energyduring acceleration of the vehicle [4, 5]. In the electric system,the round-trip efficiency for the battery is about 81%, whereasthe round-trip efficiency for a hydropneumatic accumulatoris 94% which has been proven by Parker Hannifin in theirCumulo systems [6]. As per the higher round-trip efficiencyof the energy storage devices, the energy recovering efficiencyof hydraulic system is improved to 63% when compared to53% in electrical system. Hydropneumatic accumulator in ahydraulic hybrid possesses very high power density and quickcharging capability of regenerated energy, when compared toits counterparts. Therefore, this characteristic in the opera-tion of accumulator is utilized in high power requirement
Hindawi Publishing CorporationInternational Journal of Vehicular TechnologyVolume 2014, Article ID 972049, 19 pageshttp://dx.doi.org/10.1155/2014/972049

2 International Journal of Vehicular Technology
applications such as heavy vehicles and construction andagriculturemachinery.The hydropneumatic accumulator hasrelatively poor energy density in comparison with a battery[7]. However, sizing of hydropneumatic accumulator inhydraulic hybrid dictates the energy density or energy storagecapability of accumulator.
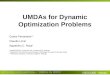
As per the literature, hydraulic hybrid systems are clas-sified based on configurations into two systems, namely,parallel and series hydraulic hybrid system as shown inFigure 1 [8–10]. In parallel hydraulic hybrid system, the powerfrom the prime mover takes a parallel path via mechanicaltransmission as well as hydraulic transmission to reachthe output shaft as shown in Figure 1(a). These systemshave better power transmission efficiency, but it has poorcontrollability on power distribution in the system due totransmission of power in two different domains [11]. On theother hand, the system input power to the series hydraulichybrid takes purely a hydraulic domain of power transmis-sion as shown in Figure 1(b). Independent control of thewheels in series configuration provides better controllabilityaspect when compared to parallel configuration [12].
SHHS in a vehicle is propelled by a system,which includessubsystems such as primemover (gasoline engine), hydraulicmotor/pump, and hydropneumatic accumulators in seriesconfiguration as shown in Figure 1(b). During braking modeof the vehicle, hydraulic regeneration pump converts thekinetic energy in the wheel into useful hydraulic energythrough hydraulic regenerative braking and the regeneratedenergy is stored in the high-pressure hydropneumatic accu-mulator. The energy efficiency of the vehicle is enhancedby using the stored regenerated energy in the accumulatorto power hydraulic traction motor during the subsequentacceleration of the vehicle [13]. There is plenty of literaturefocused on parallel hydraulic hybrid systems but the litera-tures devoted to series hydraulic hybrid systems are limitedand an overview is provided in the following paragraphs.
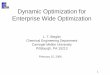
A modeling methodology for hybrid vehicle was pro-posed in 1997 and then a computermodel of SHHSwas devel-oped and investigations focused only on urban passengervehicle.This study shows that hydraulic hybrid power train isa feasible concept and fuel economy in addition to emissionreduction can be done considerably [14]. Filipi and Kimdeveloped hydraulic hybrid propulsion for heavy duty vehi-cles which combines both simulation and engine in the looptechniques to maximize fuel economy and emission benefits[15]. Ramakrishnan et al. [16] developed theoretical modelto investigate the effect of various system parameters suchas volumetric displacement of regeneration pump, prechargepressure of accumulator on the system output power inseries hydraulic hybrid system with hydrostatic regenera-tive braking. Figure 2 shows the comparative study madebetween Filipi andKim andRamakrishnan et al. series hybridconfiguration. Figure 2(a) shows the driving cycle used forthe Filipi and Kim configuration and Figure 2(b) showthe corresponding simulation results of the output powervariation.Thedevelopedmodel was comparedwith Filipi andKim model by inputting the same driving cycle as shown inFigure 2(a). It was observed that the developed system showsdrastic improvement in output power. The simulation result
using this driving cycle for the proposed system is shown inFigure 2(c). Comparison of Figure 2(b) and Figure 2(c) showsthat output power of the proposed SHHS is higher than theoutput power delivered by Filipi and Kim configuration. Theproposed system shows better ability to deliver the powerduring the acceleration phase (165th second to 205th second)and during the hydraulic regenerative braking (278th secondto 330th second). In view of a better energy managementcontrol strategy, the system incorporates an accumulatorcentric control strategy to manage the power based on stateof charge of accumulator and control the hydraulic energydelivered from the accumulator.
The system parameters like accumulator volume andsystem pressure of hydraulic hybrid driveline are optimized.A control strategy for passenger cars based on dividing theaccumulator volume into two parts, one for regeneration andthe other for road decoupling, has been proposed by Wu etal. [17]. The main target of researchers is to obtain optimumengine speed for a list of different control parameters inthe system like angular velocity and torque combinations. Aparametric study on hybrid vehicle as discussed by Sinoquetet al. [18] focused on variations of the size of the power traincomponents and optimization of the power split between theprime mover and electric motor with respect to fuel con-sumption. It was reported that system parameters are effec-tively decided using design optimization. On the other hand,researches pertaining to design optimization of hydraulichybrid system are meager. In this paper, a power bond graphapproach is used to model the dynamics of a series hydraulichybrid system. The simulation results analyze the variousmodes of operation, dynamic response of hydr-pneumaticaccumulator, primemover, and system output speed. Further,a design optimization of the system is carried out tomaximizethe system energy efficiency. This leads to increase in fueleconomy and environmentally friendly vehicle.
2. Series Hydraulic Hybrid System
The proposed configuration of the SHHS is as shown inFigure 3. The major subsystems of SHHS are a prime mover,a master hydraulic pump, a hydraulic traction motor, ahydraulic regeneration pump, and a hydropneumatic accu-mulator arranged in a series configuration. The masterhydraulic pump coupled with prime mover acts as thehydraulic power source, which converts the mechanicalenergy into hydraulic energy. According to the operatingmode, master hydraulic pump and hydropneumatic accu-mulator power the hydraulic traction motor. The hydraulicregeneration pump and the hydraulic traction motor areconnected to the wheel through a differential gear box unit.The description of the other components such as hydraulichose, gearbox, hydraulic tank, pressure relief valve, andnonreturn valve in the circuit and the operationmethodologyare detailed in the earlier work of the authors [19].
The working principle of SHHS is as shown in Figure 4.The system is divided into three operating modes, namely,acceleration mode, cruising mode, and braking mode of thevehicle.

International Journal of Vehicular Technology 3
Diff
eren
tial
Gasoline engine
Tank
Hydropneumatic accumulator
Propeller shaftHydraulic pump/motor
Wheel
Hydraulic power pathMechanical power path
(a)
Diff
eren
tial
Tank
Hydropneumatic accumulator
Hydraulic pump/motor
Wheel
Hydraulic power path
Gasoline engine
(b)
Figure 1: Hybrid configuration, (a) parallel hydraulic and (b) series hydraulic.
0
100
200
300
400
500
600
0 50 100 150 200 250 300 350
−150
−100
−50
0
50
100
150
0
5
10
15
20
25
30 (a) Input to both systems
(b) Filipi and Kim system
(c) Ramakrishnan et al. system
(165, 0)
(165, 0)
(165, 0)
(330, 0)
(330, 0)
(330, 0)
(205, 047)
(205, 036)
(205, 021)
(278, 024)
(278, 066)
(278, 158)
Vehi
cle sp
eed
(m/s
)O
utpu
t pow
er (k
W)
Out
put p
ower
(kW
)
Driving cycle time (s)
Figure 2: Comparative study between Filipi and Kim [15] andRamakrishnan et al. [16] systems.
(i) When the vehicle is in acceleration mode, energyfrom two power sources (prime mover and hydropneumaticaccumulator) are used to propel the vehicle; that is, hydraulicenergy from two sources are supplied simultaneously topower the hydraulic traction motor.
(ii) During the cruising mode of the vehicle, hydraulicenergy from hydropneumatic accumulator is cutoff and thepower from the prime mover is only used to drive thevehicle. The volumetric flow rate from the master hydraulic
pump is varied by changing the speed of the prime moverlike BLDC servomotor. Therefore, the speed of the tractionhydraulic motor or velocity of the vehicle is varied by changein hydraulic volumetric flow rate from the master hydraulicpump to the traction hydraulic motor.
(iii) In the braking mode, hydraulic energy from primemover and hydropneumatic accumulator is cutoff. An energyrecovery method called hydraulic regenerative brakingthrough displacement factor control is proposed in this work.Displacement factor control method is an energy recoveryprocess in which the controller adjusts the displacementfactor of servo-controlled variable displacement hydraulicregeneration pump and the pumping cycle starts. As aresult, the applied torque or load on the hydraulic tractionmotor increases. Thus, hydraulic regenerative braking offersresistance to the wheel rotation in braking of the vehicle. Inaddition to that, this method converts kinetic energy in thewheels (usually lost as heat energy due to mechanical frictionbraking) into useful hydraulic energy. Once the accumulatoris charged with hydraulic energy through hydraulic regener-ative braking, potential energy stored in the accumulator willincrease the SoC level in the accumulator, which can be usedin the next acceleration cycle.
An accumulator centric energy management controlstrategy is used to control the control variables such as inputspeed of the prime mover, flow rate from the accumulator,and displacement factor for hydraulic regenerative braking.As per this strategy, flow rate into and out of the accumulatoris decided by these three factors and they are regenerativebraking energy, instantaneous state of charge (SoC) of theaccumulator and power requirement. During acceleration ofthe vehicle, the controller will operate the primemover in thehigh efficiency region and control the hydraulic flow fromthe accumulator through proportional control valve to runtractionmotor until low SoCpoint or level is reached. Beyondthis point, the prime mover will supply the energy to thevehicle in constant velocity mode.

4 International Journal of Vehicular Technology
Fuzzy logic controller
P
Front axle
Master hydraulicpump
Tank
Hydropneumaticaccumulator
Hydraulic traction motor
Gear box
Variable displacement
regeneration pump
PFCV
PRV
Rearaxle
Wheel
NRVDifferential
Braking signal
Driver
Prime mover
NRV
PRV
H1 H2
H3
Figure 3: Configuration of series hydraulic hybrid system [19].
Initialization and acceleration request
Prime mover drives the master hydraulic pump
High torque demand from the vehicle
Master hydraulic pump and accumulator power the
traction motor
The power from traction motor accelerates the vehicle
Constant velocity request
Prime mover drives the master hydraulic pump
Constant torque demand from the vehicle
Master hydraulic pump powers the traction motor and accumulator power is
cutoff
Traction motor maintains constant velocity
Braking request
The power from prime-mover is cutoff
Regenerative hydraulic braking applied
Regeneration pump brakes the vehicle and absorbs the
useless kinetic energy
Energy regenerated is stored in hydraulic accumulator
Acceleration modeCruising mode
Deceleration mode
Figure 4: Working principle of series hydraulic hybrid system.
3. Modeling of System Dynamics
Modeling of system dynamics involves obtaining a mathe-matical form of description to predict the dynamic behaviorof a system in terms of physical variables. Despite thedifferences in the physical variables used to characterize thesystems in various disciplines, certain fundamental similar-ities exist. Exploiting these similarities in a defined manner,the task of modeling is simplified and our overall insight into
the dynamic performance of physical systems is increased[21]. Energy is the unified concept in this approach. Thus,power bond graphmodeling procedure would be appropriatefor modeling the dynamics of series hydraulic hybrid system,where energy flow during various operating modes is ofcommon interest.
Bond graph is a powerful tool tomodel a system involvingmechanical, hydraulics, thermal, and electrical elements suchas the hydraulic hybrid system. The SHHS is a multidomain,

International Journal of Vehicular Technology 5
Table 1: Effort and flow in various domains.
Domains Effort (𝑒) Flow (𝑓)Electrical Voltage, (V) Current, (A)Mechanical
Translational Force, (N) Velocity, (m/s)Rotational Torque, (Nm) Angular velocity, (rad/s)
Hydraulic Pressure, (Pa) Volumetric flow, (m3/s)
nonlinear mechatronics system, which consists of severalphysical and process parameters like accumulator size, initialaccumulator gas pressure, accumulator precharge pressure,master hydraulic pump-displacement, hydraulic regener-ation pump-displacement, and hydraulic traction motor-displacement [22]. The design of these parameters is acomplex and tedious process. Therefore, an optimizationprocedure has to be adopted in order to decide the systemparameters by satisfying the essential objective functions.To optimize such a physical system, a mathematical modelrepresenting the physical system under consideration isessential. Hence, bond graph modeling technique is used tomodel the nonlinear multidomain dynamic SHHS.
3.1. Power Bond Graph Approach . Bond graph modelingis a graphical, computer aided modeling methodology thatis particularly suited for the concurrent design of multidis-ciplinary systems or engineering systems like mechanical,electrical, hydraulic, or pneumatic components, includinginteractions of physical effects from various energy domains[23]. In a bond graph model, a physical system is representedby basic passive elements that are able to interchange power:resistance (𝑅), capacitance (𝐶), and inertia (𝐼) [24]. As energycan flow back and forth between two power ports of differentnodes, a half arrow is added to each bond indicating areference direction of the energy flow. Furthermore, it is auseful modeling construct to represent the amount of power,𝑃(𝑡), at each time, 𝑡, by the product of two conjugate variables,which are called effort, 𝑒, and flow, 𝑓, respectively [25, 26].
Table 1 lists the effort and flow variables in the variousdomains [27]. After the system is represented by bond graphelements, the next step consists of assigning the powerbonds and active bonds between elements. Power bonds areassigned according to the direction of positive power flow.This power convention can be set arbitrarily. Once the powerbonds are assigned, causality must be established within thebond graph. This causality analysis is determined by rulesdescribed in bond graph theory [28]. Causality in bond graphmodel is indicated with a vertical stroke at the start or endof the bond arrow to define the power components direction,that is, effort and flow direction. A causal stroke located at theend of a power bond indicated that effort is the driving forceto the element, while a stroke located at the beginning of thebond indicates that flow is the input to the element [29, 30].Causality of each type of element is summarized in Table 2.
3.2. System Modeling. The various subsystems such as themaster hydraulic pump, traction hydraulic motor, hydraulic
Table 2: Causality for bond graph elements.
Causality type Elements Interpretation
FixedSE
𝑒1
f1
Se
SF
e1
f1
Sf
Constrained
TF
e1
f1
e2
f2TF
e1
f1
e2
f2TF
GY
e1
f1
e2
f2GY
e1
f1
e2
f2
GY
Constrained
Zerojunction
f1
f3 f2
0
Onejunction
e1
e3 e2
1
Preferred𝐶
e1
f1
C
𝐼
e1
f1
I
Free𝑅
e1
f1
R
e1
f1
R
regeneration pump, hydropneumatic accumulator, propor-tional control valve, and other hydraulic components asshown in Figure 3 is modeled in power bond graph systemmodel as seen in Figure 5. The details of the modeling inpower bond graph approach are available in [31]. Modulatedsource of flow (MSf) represents the prime mover, wherethe flow output from the pump can be varied accordingto the input speed signal from the controller. Rest of thesystem determines the effort into the modulated sourceof flow. One junction number 1 (1-Jn-1) shows the torqueloss due to mechanical friction at the input shaft of mas-ter hydraulic pump. The transformer TF: 𝐷MP stands forvolumetric displacement of master hydraulic pump, whichconverts the effort and flow in mechanical rotational domainto a hydraulics domain. Flow losses due to leakage and

6 International Journal of Vehicular Technology
R
R
R
C
MTF
1
R
0
C
R
Se
0
1
I
1
R
R
1
MR
C
TF
Controller
Acceleration
Deceleration
SOC
Input speed
Valve signal
Regeneration control
Virtual driver
Prime mover
Pump torque loss
Master pump with flow loss
Hose 1 and NRV 3
Loss in hose 2
Traction motor with flow loss
PRV
Vehicle dynamics
TankTorque loss attraction motor
Regeneration pumpwith flow loss Loss in hose 3 Accumulator NRV 1
Propotional control valve
Torque loss at regeneration
pump
RPRV
CTM
DRP
rw
TTM
TBRP
TBTM
RH3
CRP
RAD
JVM
TRP
CA
PA qa
TVD
VV
FAD
FRF
FVM
BRP
BTM
RLR
q
qcr
qlr PH3
NRV 2
RRN1
RN2
PD
qd
PC
qc qd
qd
PFCV
FVD
Mechanical rotational domainMechanical translational domain Hydraulics domain
Control and sensor signals
MSf
R
1𝜔PM
1 Jn-1
𝜔MP
TMP
BMP
TMP
TBMP
R R
RC
10 0TF qmp q1
CMP
DMP
PMP
PH1
RH1
qlp
RLP
0-Jn-1
qcp1-Jn-2
P4
RN3
q2
P2q3
P2
PCH qch
0-Jn-2
1-Jn-3R1
qprv
1-Jn-41q3
P3
RH2R
PH2
R
0qtm
PTM
qlm
qcm
0-Jn-3TF
RLM
1-Jn-6
DTM𝜔TM
𝜔TM
𝜔TM
𝜔TM
𝜔TM
0-Jn-4
RRF
PRPq4
1-Jn-7
ΔP2
ΔP1
ΔP3
0-Jn-5
1-Jn-8
1-Jn-5
PMP
Δ
rp
Figure 5: Power bond graph model of series hydraulic hybrid system.
compressibility of hydraulic oil in the master hydraulic pumpare considered at 0-Jn-1.
The master hydraulic pump delivers the energy to thetraction hydraulic motor through losses such as pressureloss at 1-Jn-2 and 1-Jn-4, which corresponds to pressuredrop across hydraulic hoses 1 and 2, respectively. Afterconsidering the flow losses due to leakage and compressibilityof hydraulic oil at traction hydraulic motor, the actual flowrate (𝑞tm) powers the traction hydraulic motor. Vehicledynamics resistance and frictional resistances determine the
torque at the traction hydraulic motor. The transformer TF:𝑅𝑤, which represents the radius of the wheel, transforms
the rotational domain parameters into translational domain.The longitudinal vehicle dynamics resistance such as rollingresistance, aerodynamic resistance, and vehicle inertia areconsidered at 1-Jn-6. Torque losses at traction motor andregeneration pump are added into the model at 1-Jn-5 toobtain the actual torque at respective shafts.
The displacement of the regeneration pump (𝐷RP) isrepresented as modulated transformer (MTF) in the model,

International Journal of Vehicular Technology 7
which converts themechanical rotation into hydraulic energyand modulation represents the possibility of the variation ofthe displacement factor of the regeneration pump. Hydraulicregenerative braking is carried out by varying the displace-ment factor of the regeneration pump, which loads the wheeland regenerates the useless kinetic energy into hydraulicenergy during braking. At 0-Jn-4, the flow from the regener-ation pump is reduced due to flow losses such as leakage andloss due to compliance effect of oil (𝐶). The NRV 2 elementthatwas considered at 1-Jn-7 allows flow rate 𝑞
4to the hydrop-
neumatic accumulator represented by compliance element(𝐶𝐴).Themodulated resistance (MR) stands for proportional
control valve, which discharges the stored regenerated energyin the hydropneumatic accumulator to the traction hydraulicmotor via NRV 1 resistive element (𝑅
𝑁1).
Generally, all mechanical rotational subsystems such asprime mover, master hydraulic pump, traction hydraulicmotor, and regeneration pump are kinetic energy parts in thesystem.However, themain kinetic energy part of the system isthe hydraulic regenerative braking subsystem,which includesthe traction hydraulic motor, regeneration hydraulic pump,and the vehicle. The useless kinetic energy in the tractionhydraulic motor during braking phase is absorbed by theregeneration hydraulic pump and stored in the potentialenergy element hydropneumatic accumulator as potentialenergy by compressing the nitrogen gas. Hydraulic tank,which stores the hydraulic energy, is considered a potentialenergy element.
The following is a summary of the assumptions that weremade, when developing the bond graph dynamic model of aSHHS.
(1) The prime mover dynamics is considered as idealcondition and without any losses in the prime mover.
(2) The reservoir (tank) pressure is at atmospheric pres-sure. As only gauge pressures are considered.
(3) Gas compression and expansion in the hydropneu-matic accumulator is assumed to be obeying isen-tropic law.
(4) The proportional control valve dynamics is assumedto be based on orifice theory.
(5) The leakage flow through the cross-ports in the pumpare laminar.
(6) Possible dynamical behavior of the pressure in thetransmission lines between regeneration pump, accu-mulator, and proportional control valve is assumed tobe negligible.
(7) Ineffective volumes, that is, the volume of the fluid inthe hoses between themaster hydraulic pump and thehydraulic motor, are neglected.
(8) The hydraulic pump and motor are assumed to berigid, that is, no compliance in the walls. The stiffnessof the hydraulic pump or motor walls is five timeshigher than that of the hydraulic oil. Therefore, whenoperating the system, compliance effect from pumpor motor walls is negligible compared to the oilcompliance.
(9) The inertial effect in all the hydraulic components andfluids are neglected.
Thevarious hardware components used in themodel are indi-cated in detail and mathematical model of each subsystemderived from junctions of bond graph model is explained inthe followings sections.
3.3. Modeling Information of Subsystems. The subsystemsconsidered in modeling a SHHS are prime mover, masterhydraulic pump, pressure loss in hydraulic hose 1, pressurerelief valve, pressure loss in hose 2, traction hydraulic motor,vehicle dynamics, regeneration hydraulic pump, pressureloss in hydraulic hose 3, nonreturn valve, hydropneumaticaccumulator, and proportional control valve. The dynamicsof the each subsystem is explained as below.
(a) Prime Mover (PM). The prime mover of SHHS modelrepresents an ideal rotary actuator.The actuator ismounted tothe fixed world and applies an angular velocity. This angularvelocity can be set to a (variable) value given by the inputsignal omega; the torque is determined by the rest of thesystem.
(b)Master Hydraulic Pump (MP).Themaster hydraulic pumpis considered as a fixed displacement axial piston pump and isrepresented as transformer (TF) element named MP. Torqueloss at the input shaft ofmaster hydraulic pump is representedas pumpmechanical efficiency friction coefficient (𝐵MP). Theeffort loss at 1-Jn-1 is implemented using a resistance elementwith the above said friction coefficient. At 1-Jn-1, the followingequation shows the torque at the prime mover shaft:
𝑇PM = 𝐵MP𝜔MP + 𝑇MP. (1)
The following equation gives the speed of the master hydrau-lic pump shaft or prime mover at 1-Jn-1:
𝜔PM = 𝜔MP =
𝑞mp
𝐷MP. (2)
After torque loss, the following equation gives the torque atmaster hydraulic pump shaft:
𝑇MP = 𝑇PM − 𝐵MP𝑞mp
𝐷MP. (3)
The ideal transformer TF-element (MP) converts theeffort (𝑇MP) and flow (𝜔MP) in rotational mechanical domaininto effort (𝑃MP) and flow (𝑞mp) in the hydraulic domain.Thehydraulic flow losses due to various leakages such as internal,external, and cross-port leakages are considered as a singleresistive element𝑅LP at 0-Jn-1.The flow loss due to compress-ibility or effect of bulk modulus of hydraulic oil is consideredat this junction and is represented as compliance element(𝐶MP) and the compressibility of hydraulic oil is denoted as𝐶MP. The element 𝐶MP is assigned an integral causality andit represents the state variable (𝑉
𝑖—instantaneous volume) at
this junction.

8 International Journal of Vehicular Technology
The hydraulic flow rate (𝑞1) is equivalent to ideal hydrau-
lic flow rate (𝑞mp)minus leakage flow loss (𝑞lp) and flow lossdue to compressibility of oil (𝑞cp) is shown as
𝑞1= 𝑞mp − 𝑞lp − 𝑞cp. (4)
The following shows the hydraulic flow rate from the masterhydraulic pump in terms of the state variable and resistanceelements:
𝑞1= 𝑞2= 𝐷MP𝜔MP −
𝑃MP𝑅LP
−
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
. (5)
The parameter 𝑅LP is the leakage resistance of the pumpobtained by measuring the amount of bypass fluid from thecase drain port for three different speeds of the pump over aperiod of time and with constant working temperature [32].
Pressure at the output port of master hydraulic pump isgiven as
𝑃MP =
𝑇MP𝐷MP
. (6)
(c) Pressure Loss in Hydraulic Hose 1. The pressure dropacross the hose between master hydraulic pump and four-way junction, which connects pressure relief valve (PRV)and proportional control valve, is considered in this dynamicsystem model. In 1-Jn-2, the resistance 𝑅
𝐻1is provided to
the effort (𝑃MP), which creates a pressure drop across thehydraulic hose. The pressure (𝑃MP) at the master hydraulicpump is shown as
𝑃MP = 𝑃𝐻1
+ 𝑃2+ Δ𝑃4. (7)
The following equation shows the pressure 𝑃2at the four-way
junction end of hose:
𝑃2= 𝑃MP − 𝑅
𝐻1𝑞2− Δ𝑃4. (8)
(d) Pressure Relief Valve. The effect of pressure relief valveis reflected at 0-Jn-2. The flow rate to the traction hydraulicmotor is determined by flow rates across the PRV andproportional control valve through nonreturn valve (NRV) 1.At 0-Jn-2, effort remains constant and the following equationgives the flow rate (𝑞
3) to the traction hydraulic motor:
𝑞3= 𝑞2− 𝑞prv − 𝑞ch. (9)
The following shows the flow rate through the PRV:
𝑞prv = (Δ𝑃5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5. (10)
Substituting (10) in (9) gives the flow variable (𝑞3) in terms of
NRV 1 and PRV dynamics shown as
𝑞3= 𝑞2− [(Δ𝑃
5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5] − 𝑞ch. (11)
(e) Pressure Loss at Hydraulic Hose 2. The pressure dropacross the hose between 0-Jn-2 and traction hydraulic motor
is considered in this dynamic system model. At 1-Jn-4, theresistance 𝑅
𝐻2is provided to the effort (𝑃
2), which creates
a pressure drop across the hydraulic hose. At 1-Jn-4, flowremains constant and the junction equation is shown asfollows:
𝑃2= 𝑃𝐻2
+ 𝑃3. (12)
The pressure (𝑃3) at the traction hydraulic motor end of
hydraulic hose is shown as follows:
𝑃3= 𝑃TM = 𝑃
2− 𝑅𝐻2𝑞3. (13)
(f) Traction Hydraulic Motor (TM). The traction hydraulicmotor is considered as a fixed displacement axial pistonpump and it is represented as transformer (TF) element. Thehydraulic flow rate (𝑞tm) at the traction hydraulic motor isequivalent to cumulative hydraulic flow rate (𝑞
3) frommaster
hydraulic pump and hydropneumatic accumulator minusleakage flow loss and flow loss due to compressibility of oilat traction hydraulic motor is shown as follows:
𝑞tm = 𝑞3− 𝑞lm − 𝑞cm. (14)
The following equation shows the hydraulic flow rate tothe traction hydraulic motor in terms of the state variable(volume of oil and pressure drop) and resistance elements(leakage resistance):
𝑞tm = 𝑞2− 𝑞ch − (Δ𝑃
5− 𝑃set) 𝐺0
− 𝐺PRVΔ𝑃5 −𝑃3
𝑅LM−
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
.
(15)
The following equation gives the pressure at the tractionhydraulic motor:
𝑃TM =
𝑇TM𝐷TM
. (16)
The ideal transformer TF-element converts the effort (𝑃TM)and flow (𝑞mp) in the hydraulic domain into effort (𝑇TM) andflow (𝜔TM) in the rotational mechanical domain. Torque lossat the output shaft of traction hydraulic motor is representedas motor mechanical efficiency friction coefficient (𝐵TM) at1-Jn-5.
(g) Vehicle Dynamics. It consists of torque due to vehiclemass,aerodynamic force, and rolling resistance force. Characteris-tics of the vehicle (Honda Brio) are discussed below.
The following equation shows the radius of the wheel, 𝑟𝑤
from the tire dimensions:
𝑟𝑤= 0.5 × 𝑑rim + 0.01 × 𝐻 × 𝑤. (17)
The total vehicle mass, 𝑚veh accounting for wheel inertiaeffect in linear motion is shown as follows:
𝑚veh = 𝑚 + 4 ×
𝐽𝑤
𝑟2
𝑤
. (18)

International Journal of Vehicular Technology 9
The inertial resistance force, 𝐹VM is obtained through thefollowing:
𝐹VM = 𝑚veh𝑔 sin [arctan (0.01 × 𝛼)] . (19)
Road configuration, the resistance force due to aerodynamicdrag, 𝐹AD is calculated as follows:
𝐹AD = 0.5𝜌air𝐶𝑥𝑎𝑠(𝑉V + 𝑉wind)2
. (20)
The following equation gives the rolling friction resistanceforce, 𝐹RF as shown below:
𝐹RF = 𝑚veh𝑔 (𝑓 + 𝑘𝑉V) . (21)
At 1-Jn-6, the force due to vehicle dynamics is shown asfollows:
𝐹VD = 𝐹VM + 𝐹RF + 𝐹AD. (22)
The ideal transformer TF-element (𝑟𝑤) converts effort (𝐹VD)
and flow (𝑉V) in the mechanical translation domain intothe effort (𝑇VD) and flow (𝜔TM) in the mechanical rotationdomain. At 1-Jn-5, flow remains unchanged; (23) shows thetorque at the traction motor:
𝑇TM = 𝑇RP + 𝑇VD + 𝑇BTM + 𝑇BRP. (23)
The following equation gives the torque at the traction motorin terms of vehicle characteristics:
𝑇TM = 𝑇RP + 𝑟𝑤(𝐹VM + 𝐹RF + 𝐹AD) + 𝐵TM𝜔TM + 𝐵RP𝜔TM.
(24)
(h) Regeneration Pump (RP). It is considered as a variabledisplacement axial piston pump and it is represented as mod-ulated transformer (MTF) element. Torque loss at the inputshaft ofmaster hydraulic pump is represented as regenerationpump mechanical efficiency friction coefficient (𝐵RP). Theeffort loss at 1-Jn-5 is implemented and the following equationshows the torque at regeneration pump:
𝑇RP = 𝑇TM − 𝑟𝑤(𝐹VM + 𝐹RF + 𝐹AD) − 𝐵TM𝜔TM − 𝐵RP𝜔TM.
(25)
The following equation gives speed of the regeneration pumpshaft or prime mover at 1-Jn-5:
𝜔RP = 𝜔TM =
𝑞rp
𝐷RP. (26)
The ideal modulated transformer MTF-element converts theeffort (𝑇TM) and flow (𝜔TM) in the rotational mechanicaldomain into effort (𝑃RP) and flow (𝑞rp) in the hydraulicdomain. The hydraulic flow losses due to various leakagessuch as internal, external, and cross-port leakages are con-sidered as a single resistive element 𝑅RP at 0-Jn-4. The flowloss due to compressibility of hydraulic oil is considered andis represented as compliance element. The compressibility ofhydraulic oil is denoted as 𝐶RP.
The hydraulic flow rate (𝑞4), after flow loss, is equivalent
to ideal hydraulic flow rate (𝑞rp)minus leakage flow loss (𝑞lr)and flow loss (𝑞cr) due to compressibility of oil is shown asfollows:
𝑞4= 𝑞𝑐= 𝑞rp − 𝑞lr − 𝑞cr. (27)
The following equation shows the hydraulic flow rate fromthe regeneration pump in terms of the state variable andresistance elements:
𝑞4= 𝑞𝑐= 𝐷RP𝜔tm −
𝑃RP𝑅LR
−
𝐵
𝑉03
𝑑𝑃RP𝑑𝑡
. (28)
Pressure at the output port of regeneration pump is shown asfollows:
𝑃RP =
1
𝐷RP(𝑇TM − 𝑟
𝑤(𝐹VM + 𝐹RF + 𝐹AD)
−𝐵TM𝜔TM − 𝐵RP𝜔TM) .
(29)
(i) Pressure Loss in Hydraulic Hose 3. The pressure dropacross the hose between regeneration pump and NRV 2 isconsidered in this model. In 1-Jn-6, flow remains unchangedand the resistance 𝑅
𝐻3is provided to the effort (𝑃RP),
which creates a pressure drop across the hydraulic hose. Thefollowing equation shows the pressure 𝑃
4at the NRV 2 end of
hydraulic hose 3:
𝑃𝐶= 𝑃𝑅𝑃
− 𝑞4𝑅𝐻3
− 𝑞4𝑅𝑁1. (30)
(j) NRV. This valve allows unidirectional flow towards thehydraulic accumulator from regeneration pump. Duringacceleration of the vehicle, NRV 2 restricts flow throughregeneration pump. The following equation shows the pres-sure at nonreturn end of NRV 2 and flow rate remains thesame across the NRV 2:
Δ𝑃2= 𝑃RP − 𝑃
𝑐− 𝑞4𝑅𝐻3. (31)
(k)Hydropneumatic Accumulator.The inert gas (nitrogen gas)is compressed and expanded under isentropic conditions.Pressure of the fluid in the accumulator is computed by theuse of an algebraic equation derived from the isentropic law,𝑃𝑉𝛾 = constant. Input of the subsystem is the flow to the
accumulator, 𝑞𝑎. At any time, the pressure of gas is equal to the
pressure of the fluid in the accumulator and it is representedas 𝑃gas = 𝑃
𝐴. The total volume (𝑉
𝑎) of accumulator is equal to
the sum of the volume of gas (𝑉gas) and the volume of fluid(𝑉oil) and is constant at any time as shown as follows:
𝑑𝑉𝑎
𝑑𝑡
=
𝑑𝑉gas
𝑑𝑡
+
𝑑𝑉oil𝑑𝑡
= 0. (32)
On the other hand, the variation of fluid volume is equal tothe input flow (𝑞
𝑎) as written as
𝑑𝑉oil𝑑𝑡
= 𝑞𝑎. (33)

10 International Journal of Vehicular Technology
The following equation shows the gas volume variation:
𝑑𝑉gas
𝑑𝑡
= −𝑞𝑎. (34)
Let us consider nominal volume (𝑉0gas) and precharge pres-
sure (𝑃0gas), from isentropic law (𝛾 = 1.4) is shown as follows:
𝑃gas(𝑉gas)𝛾
= 𝑃0gas(𝑉0gas)
𝛾
= const. (35)
Finally, the pressure in the accumulator is shown as follows:
𝑃gas =𝑃0gas(𝑉0gas)
𝛾
∫ 𝑞𝑎𝑑𝑡
. (36)
(l) Proportional Flow Control Valve (PFCV). The regeneratedenergy stored during the braking is discharged to tractionmotor using the proportional control valve at subsequentacceleration of the vehicle. At proportional control valve, thefollowing equation shows the discharge flow rate from theproportional control valve at 1-Jn-8:
𝑞𝑑= 𝐶𝑑𝐴√
2Δ𝑃3
𝜌
+ 𝐺LP ⋅ Δ𝑃3. (37)
The following equation shows the pressure difference acrossthe proportional control valve:
Δ𝑃3= 𝑃CH − 𝑃
𝐷. (38)
4. Parametric Study
Figure 6 shows the typical federal urban driving cycle [20]used as an input for the series hydraulic hybrid systemmodel. It represents the velocity of the vehicle versus timeand it consists of several acceleration and braking phasesbetween 0 second and 600 seconds of driving cycle time.Thefocus of present simulation study starts from 134th secondto 492th second for one acceleration and deceleration cycle.The dynamic characteristics of series hydraulic hybrid systemin a vehicle are studied and analyzed through simulation.Input system parameters used for simulation in power bondgraph model are shown in Table 3. These parameters arechosen from the published literatures.The system simulationand design optimization of series hydraulic hybrid systemconsiders a commercially available 65 kW Honda car. It isdefined in the vehicle dynamic subsystem model beforestarting the system simulation and design optimization.The specifications selected from the Honda car as inputparameters to the model are listed in Table 3. The systembehavior is analyzed as below from 134th second onwards.
Figure 7 shows the variation of various parameters ofinterest with respect to driving cycle time for 2 cycles of thefederal urban driving cycle. Several points of interest andcorresponding parameters values are indicated.The points ofinterest on the driving cycle are start of acceleration (134 s),end of acceleration (164 s), start of braking (460 s), and end
Driving cycle time (s)0 100 200 300 400 500 594
0
5
10
15
20
25
30
35
40 BrakingAcceleration
Velo
city
(m/s
)
Figure 6: Federal urban driving cycle [20].
of braking (492 s). Figure 7(a) shows the input speed tothe master hydraulic pump. During acceleration of vehicle,prime mover as well as hydropneumatic accumulator simul-taneously powers the hydraulic traction motor. The angularspeed of the pump increases from 0 to 134 rad/s at 164th ofdriving cycle time, thus delivering the hydraulic energy to thehydraulic tractionmotor.The vehicle starts accelerating from134th second to 165th second in the driving cycle.
The hydraulic traction motor is powered by the hydraulicenergy from the master hydraulic pump and the hydraulicaccumulator to meet the power demand at the wheels. Thechange in flow rate of hydraulic oil from the accumulatorbetween 134th and 165th second as seen in Figure 7(b) showsthe discharge of hydraulic energy from the hydropneumaticaccumulator. Here, negative sign of the volumetric flow rateindicates the discharge of oil from the accumulator and pos-itive sign indicates the charging of oil into the accumulator.
The hydraulic oil volume in the hydraulic accumulatordecreases from the initial stored value of 6.3 × 10
−3m3 to1.7 × 10
−3m3 as shown in Figure 7(c). The correspondingchange in accumulator oil pressure is from 22MPa to 12MPaas shown in Figure 7(d). It is also observed from Figure 7(e)that hydraulic traction motor speed increases from 0 to192 rad/s at 165th second of driving cycle time due to thecombined power from the two sources. The variables in thesystem parameters indicate that the prime mover as wellas hydropneumatic accumulator simultaneously deliver thepower to the hydraulic traction motor in the accelerationmode of the system.
In cruising or constant velocity drive of vehicle, hydraulicpower from the hydropneumatic accumulator is suspendedand only prime mover supplies power to drive the hydraulictractionmotor; that is, input speed remains steady from 166thsecond to 459th second in cycle time as shown in Figure 7(a).At the same time, hydropneumatic accumulator gets chargedand discharged with respect to the acceleration and braking.Theflow rate fromhydropneumatic accumulator after the endof acceleration (164 s) until start of the braking (460 s) in totaldriving cycle time substantiates the charging and dischargingof the accumulator as shown in Figure 7(b). Hydropneumatic

International Journal of Vehicular Technology 11
Table 3: Input parameters to power bond graph model.
Parameters Quantity Description𝐵MP (Nms) 1.65 × 10−1 Master pump mechanical efficiency friction coefficient
𝐵RP (Nms) 1.65 × 10−1 Regeneration pump mechanical efficiency frictioncoefficient
𝐵TM (Nms) 1.65 × 10−1 Traction motor mechanical efficiency frictioncoefficient
𝐷MP (m3/rev) 1.1 × 10−5 Volumetric displacement of master pump
𝑅LP (Pa-s/m3) 1 × 103 Master pump internal leakage resistance
𝑉𝑎( m3) 0.015 Nominal volume of accumulator
𝑃0gas (Pa) 9 × 106 Precharge pressure of accumulator𝑃prv (Pa) 40 × 106 Maximum operating pressure𝐷TM (m3/rev) 8.3 × 10−6 Volumetric displacement of traction motor
𝐷RP (m3/rev) 1.5 × 10−5 Volumetric displacement of hydraulic regeneration
pump𝐹VH (N) 9500 Resistant force due to vehicle moment of inertia𝐹RF (N) 8.45 Vehicle rolling resistance force𝑟𝑊(m) 0.175 Radius of the wheel
𝑎𝑠(m2) 0.5 Front area of the vehicle
accumulator volume and oil pressure remains steady duringthe cruising mode as shown in Figure 7(c) and Figure 7(d)from 166 to 459th second in cycle time.
In the braking phase of the vehicle between 460th and492th second of the driving cycle time, the volumetric flow ofoil to the accumulator takes place as shown in Figure 7(b). Inaddition, the hydropneumatic accumulator volume expandsadiabatically from 1.4 × 10
−3m3 to 6.4 × 10−3m3 as shown
in Figure 7(c) and volumetric flow rate from hydraulicregeneration pump increases to amaximumof 2.1×10−4m3/sand then gradually reduces to zero flow rate as shown inFigure 7(g). At the same time, pressure also rises from 12MPato 22MPa as shown in Figure 7(d). It is observed that fromthe above response that 5 × 10
−3m3 of hydraulic oil volumeis stored in the accumulator. The input speed to the pumpdecreases from 141 to 0 rad/s as shown in Figure 7(a) andcorrespondingly system output speed; that is, speed of thetraction motor decreases from 192 to 0 rad/s as shown inFigure 7(e).
The instantaneous output power of the systemas shown inFigure 7(f) substantiates the variation in the power variables.The useless kinetic energy available during braking is recov-ered using hydraulic regeneration, which can be seen fromthe response curves in Figure 7(g) and Figure 7(e). Moreover,hydraulic regenerative braking helps in improving the energyefficiency and fuel economy and reduces mechanical brakewear and reduces emissions from the engine.
The system input power and the corresponding outputpower variations with respect to driving cycle time for onecycle are shown in Figure 8(a) and Figure 8(b), respectively.These are used to evaluate the energy consumed and energydelivered by the system. Moreover, energy recovered duringbraking is evaluated from the instantaneous hydraulic regen-eration power as shown in Figure 8(c). To understand thesystem energy efficiency trends, the energy values for one
driving cycle are calculated by the areas under the curve inFigure 8. Input energy consumed and output energy deliveredby the system for the given federal urban driving cycle are9389 kJ and 8646 kJ, respectively, as shown in Figure 9. Theenergy efficiency of the system (𝜂EE) is evaluated as 92%from ratio of the input energy consumed and output energydelivered by the system.The hydraulic regeneration efficiency(𝜂RE) of 16.4% is achieved, which is the ratio of energyrecovered or regenerated energy (𝑅
𝐸)—213 kJ from available
braking energy (𝐵𝐸) of 1300 kJ as shown in Figure 9.
5. Design Optimization
5.1. Objective Function Formulation. Parametric design opti-mization is an essential procedure for designing the physicaland process parameters of series hydraulic hybrid system forbetter performance and energy efficiency. Optimal systemparameters values are determined by maximizing systemenergy efficiency using Broydon Fletcher Goldfarb Shanno(BFGS) optimizationmethod [33].Thismethod not only usesthe gradient of a function but also the second order gradientto determine the search direction.The second order gradientis estimated based on previous search directions. The searchdirection is kept for each new step until a minimum has beenfound. Then a new search direction is determined and theprocess continues.
From the junction equations and subsystem equations inthe system model derived earlier, the input power (𝑃IN) tothe system is derived as a function of system parameters asfollows:
𝑃IN = 𝜔PM𝐷MP (𝑅𝐻1𝑞2 + 𝑃𝐻2
+
𝑇TM𝐷TM
+ Δ𝑃4)
+
𝜔PM𝐵MP𝐷MP
(𝑞tm +
𝑃3
𝑅LM+
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡

12 International Journal of Vehicular Technology
0 100 200 300 400 500 600 700 800 900 100011001200
Driving cycle time (s)
0
50
100
150
200
250
Syste
m in
put s
peed
(rad
/s)
(492, 0)(134, 0)
Cycle 2Cycle 1
(460, 141)(164, 134)
−3.0 × 10−4
× 10−4−1.0
× 10−41.0
× 10−43.0
(492, 0)
(460, 2.15 × 10−4)
(164, −4.15 × 10−5)(134, 0)
Accu
mul
ator
oil
flow
rate
(m3/s
)
(460, 1.4 × 10−3)
(492, 6.4 × 10−3)
(164, 1.7 × 10−3)
(134, 6.3 × 10−3)
Accu
mul
ator
oil v
olum
e (m
3)
0
5
10
15
20
(460, 12)
(492, 22)
(164, 12)
(134, 22)
Accu
mul
ator
oil p
ress
ure (
MPa
)
0
50
100
150
200
250
(460, 192)
(492, 0)
(164, 192)
(134, 0)
(492, 0)(134, 0)
Syste
m o
utpu
tsp
eed
(rad
/s)
0
10
20
30
(460, 22)
(164, 18)
Syste
m o
utpu
tpo
wer
(kW
)
(492, 0)
(460, 2.15 ×10−4)
Rege
nera
tion
flow
rate
(m3/s
)
0.0×10−4
×10−42.0
4.0 × 10−3
0.0 × 10−3
(a)
(b)
(c)
(d)
(e)
(f)
(g)
Figure 7: System parameters versus driving cycle time.
+ [(Δ𝑃5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5] − 𝑞ch
+
(𝑅𝐻1𝑞2+ 𝑃𝐻2
+ 𝑇TM/𝐷TM + Δ𝑃4)
𝑅LP) .
(39)
The following equation shows the output power (𝑃OUT)delivered from the system as a function of system parameters:
𝑃OUT = (
𝑇MP𝐷MP
− 𝑅𝐻1𝑞2− Δ𝑃42− 𝑅𝐻2𝑞3)
× (𝐷MP𝜔MP −𝑇MP
𝐷MP𝑅LP−
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
−
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
−
𝑇TM𝐷TM𝑅LM
− 𝑃0gas(𝑉0gas)
𝛾 𝑑𝑃gas
𝑑𝑡
− (Δ𝑃5− 𝑃set) 𝐺0 − 𝐺PRVΔ𝑃5) .
(40)Detailed derivation of input power equation is available at theAppendix. Objective functions of the system are derived asshown below.

International Journal of Vehicular Technology 13
(460, 20.48)
0
5
10
15
20
25
30
35
Syste
m in
putp
ower
(kW
)
(164, 18.82)
(460, 18.57)
(164, 16.72)
(134, 0)
0
5
10
15
20
25
30
35
Syste
m o
nput
pow
er (k
W)
(492, 0)
(492, 0)
(134, 0)
0 100 200 300 400 500 600
0
1
2
3(460, 3)
(492, 0)Rege
nera
ted
hydr
aulic
pow
er (k
W)
Driving cycle time (s)
(a)
(b)
(c)
Figure 8: System input, output, and regeneration power plots.
0
1
2
3
4
5
6
7
8
9
10×103
Inputenergy
Outputenergy
Regeneratedenergy
Available brakingenergy
Syste
m en
ergy
(kJ)
𝜂EE -92%
𝜂RE -16.4%
Eout-8646
BE-1300
RE -213
Ein -9389
Figure 9: System efficiency study.
The following equation shows the system output energy(𝐸OUT):
𝐸OUT = ∫
𝑇
0
𝑃OUT𝑑𝑡. (41)
The following equation shows the system input energy (𝐸IN):
𝐸IN = ∫
𝑇
0
𝑃IN𝑑𝑡. (42)
The two objective functions for the multiobjective opti-mization problems are maximize system output energy andminimize system input energy for the supplied input power.
The energy efficiency of the system, 𝜂EE, which is theratio of system energy delivered to the system to the energyconsumed, is formulated as shown in (43). The compositefunction-maximize energy efficiency is given as
𝜂EE = (
𝐸OUT𝐸IN
) × 100. (43)
The system parameters are optimized with compositefunction-maximizing energy efficiency, which satisfies boththe objective functions-maximize system output energy andminimize system input energy. However, the design opti-mization process and energy management control strategywill be responsible for maximizing the designated cost func-tion in (43).
Mainly two constraints are imposed and they are asfollows. (1) Accumulator size—energy density of hydrop-neumatic accumulator depends on its own size. However,oversized accumulator would increase vehicle weight andvehicle fuel consumption at the same time.
(2) Precharge pressure—power density of the hydropneu-matic accumulator depends on precharge pressure. Usually,precharge is 0.9 times theminimum accumulator pressure. Inthis system, the lower the precharge pressure provides higherpower density.
The system simulation is carried out for each set of inputvariables (design variables) to determine the output variables,that is, input, output energy, and energy efficiency of the sys-tem. Optimization results will be discussed in the followingsubsection.
5.2. Results and Discussion. Thedesign optimization of serieshydraulic hybrid system considers optimizing the key systemparameters or design variables such as precharge pressure(𝑃0gas), nominal volume of accumulator (𝑉
𝑎), volumetric
displacement of master hydraulic pump (𝐷MP), and tractionhydraulic motor (𝐷TM) which has direct effect on the energyefficiency of the system. The parametric simulation study isused to identify the upper bound and lower bound values ofthese parameters. Table 4 tabulates the input parameters ofdesign variables considered for the optimization. The designoptimization process is a process in which the key systemparameters or design variables are varied from lower boundlimit to upper bound limit with a step size value and thedetailed procedure for the optimization process is given in[31]. The different combination of these design variablesvalues form a design ID or parameter set. The maximumsystem energy efficiency for the particular optimal parameterset or design ID is as shown in Figure 10. It is found that,after several iterations, the system energy efficiency reachesmaximum of 95.6% and is found at 34th iteration. Duringthe optimization, the energy efficiency of the system increasesfrom 91.8% to 95.6% and design ID 34 withmaximum energyefficiency of 95.6% is chosen as a global optimal point.
Table 5 tabulates the corresponding design ID orparameter set for the 34th iteration (global optimal point)

14 International Journal of Vehicular Technology
Table 4: Input parameters to design optimization process.
Design variables Lower bound value Upper bound value Step size𝑉𝑎(m3) 0.008 0.02 0.001
𝐷MP (m3/rev) 6 × 10−6 1.4 × 10−5 1 × 10−6
𝐷TM (m3/rev) 8 × 10−6 6.8 × 10−5 0.1 × 10−6
𝑃0gas (Pa) 6 × 106 1.5 × 107 1 × 106
Table 5: Design optimization-optimal values.
Design variables Initial values Optimal values𝑉𝑎(m3) 0.015 0.008
𝐷MP (m3/rev) 1.1 × 10−5 1.4 × 10−5
𝐷TM (m3/rev) 8.3 × 10−6 8 × 10−6
𝑃0gas (Pa) 9 × 106 9.4 × 106
91.5
92
92.5
93
93.5
94
94.5
95
95.5
96
0 10 20 30 40 50
Syste
m en
ergy
effici
ency
(%)
Iterations34
Global optimal point
Figure 10: System energy efficiency versus iterations.
such as accumulator size—0.008m3, precharge pressure ofaccumulator—9.4 × 10
6N/m2, volumetric displacement ofmaster hydraulic pump—1.4 × 10
−5m3/rev, and volumetricdisplacement of traction hydraulic motor—8 × 10
−6m3/rev.It also tabulates the initial values before optimization of thedesign variables. The optimal design variables values in thedesign ID-34 was inputted into the systemmodel and systemsimulation is repeated.
Figure 11 shows the trend of total input energy and outputenergy of the system (before and after optimization of thesystem) over the period of driving cycle. The variations ofenergy with cycle time after optimization are higher thanthose before optimization of system parameters. It can beobserved that 14705 kJ of output energy is delivered by theoptimal system for the given input energy of 14063 kJ whencompared to 8646 kJ of output energy for the correspondinginput energy of 9389 kJ in the nonoptimal system. However,the system energy efficiency after optimization has increasedby 3.6% from the initial value of 92% before optimizationto 95.6% after optimization. Figure 12 shows the change ininstantaneous input power and output power of the system.It was observed that, the trend of instantaneous output power
0 100 200 300 400 500 6000
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
9389
8646
14063
14705
(2)
(1)(4)
(3)(4)
(3)
(2)(1)
Syste
m en
ergy
(kJ)
×103
Input energy consumed before optimizationOutput energy delivered before optimizationInput energy consumed after optimizationOutput energy delivered after optimization
𝜂EE = 95.5% after optimization
𝜂EE = 92% before optimization
Driving cycle time (s)
Figure 11: System energy before and after optimization.
in the optimal system as shown in Figure 12(d) after opti-mization has improved when compared to the output powerin nonoptimal system as shown in Figure 12(b). Similarly,instantaneous input power of optimal system as shown inFigure 12(c) is higher than input power in the nonoptimalsystem as shown in Figure 12(a) for the correspondingsupplied input power.
6. Conclusion
In this paper, a unified power bond graphmodeling approachhas been used to model the dynamics of a series hydraulichybrid system. An initial comparison of the proposed systembehavior against a reference configuration of series hybridfrom literature showed a substantial improvement in theoutput power delivered. Simulation results explain variousmodes of operation in system and also describe the dynamicresponse of hydropneumatic accumulator, prime mover, andsystemoutput speed.The optimization problem is formulatedfor maximizing the system energy efficiency to obtain the

International Journal of Vehicular Technology 15In
put p
ower
bef
ore
optim
izat
ion
(kW
)
05101520253035
0 100 200 300 400 500 600
Driving cycle time (s)
(a)
Out
put p
ower
bef
ore
optim
izat
ion
(kW
)
05101520253035
0 100 200 300 400 500 600
Driving cycle time (s)
(b)
Inpu
t pow
er aft
erop
timiz
atio
n (k
W)
0 100 200 300 400 500 600
Driving cycle time (s)
0
10
20
30
40
50
(c)
Out
put p
ower
after
optim
izat
ion
(kW
)
0 100 200 300 400 500 600
0
10
20
30
40
50
Driving cycle time (s)
(d)Figure 12: System power versus time.
optimal key system parameters. Optimization of key com-ponent sizes in series hydraulic hybrid system is carriedout. Optimization results show that system energy efficiencyhas increased by 3.6% (increased from 92% to 95.6%) whencompared to system output energy in nonoptimized system.Thus, system is designed by parameter optimization basedon the composite objective function. This procedure leadsto better performance and indirectly leads to better fuelefficiency.
Appendix
The detailed derivation of equations for input power andoutput power of the system is derived as follows.
Input Power (𝑃IN).The input power of the system is a functionof torque at prime mover and speed input to the system isshown as follows:
𝑃IN = 𝑇PM𝜔PM. (A.1)
From (1) and (2), the torque at the prime mover is derived asfollows:
𝑇PM = 𝐷MP𝑃MP + 𝐵MP𝑞mp
𝐷MP. (A.2)
Substituting (4) in (A.2) gives the torque at prime mover interms of actual flow rate at master hydraulic pump as follows:
𝑇PM = 𝐷MP𝑃MP +𝐵MP𝐷MP
(𝑞1+ 𝑞lp + 𝑞cp) . (A.3)
From (5) and (A.3), (A.4) can be written as
𝑇PM = 𝐷MP𝑃MP +𝐵MP𝐷MP
(𝑞1+
𝑃MP𝑅LP
+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
) . (A.4)
Substituting (7) in (A.4) gives the torque at prime mover interms of 𝑃
2, 𝑞4, and 𝑅
𝐻1as follows:
𝑇PM = 𝐷MP (𝑅𝐻1𝑞2 + 𝑃2+ Δ𝑃4)
+
𝐵MP𝐷MP
(𝑞1+
(𝑅𝐻1𝑞2+ 𝑃2+ Δ𝑃4)
𝑅LP+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
) .
(A.5)
From (11) and (A.5), (A.6) can be written as
𝑇PM = 𝐷MP (𝑅𝐻1𝑞2 + 𝑃2+ Δ𝑃4)
+
𝐵MP𝐷MP
(𝑞3+ [(Δ𝑃
5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5] − 𝑞ch
+
(𝑅𝐻1𝑞2+ 𝑃2+ Δ𝑃4)
𝑅LP+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
) .
(A.6)
The following equation can be written by substituting (12),(15), and (16) in (A.6):
𝑇PM = 𝐷MP (𝑅𝐻1𝑞2 + 𝑃𝐻2
+
𝑇TM𝐷TM
+ Δ𝑃4)
+
𝐵MP𝐷MP
(𝑞tm +
𝑃3
𝑅LM+
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
+ [(Δ𝑃5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5] − 𝑞ch
+
(𝑅𝐻1𝑞2+ 𝑃𝐻2
+ 𝑇TM/𝐷TM + Δ𝑃4)
𝑅LP) .
(A.7)
Finally, the input power to the system is derived as a functionof system parameters as shown in (A.8), which correspondsto (39):
𝑃IN = 𝜔PM𝐷MP (𝑅𝐻1𝑞2 + 𝑃𝐻2
+
𝑇TM𝐷TM
+ Δ𝑃4)

16 International Journal of Vehicular Technology
+
𝜔PM𝐵MP𝐷MP
(𝑞tm +
𝑃3
𝑅LM+
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
+
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
+ [(Δ𝑃5− 𝑃set) 𝐺0 + 𝐺prvΔ𝑃5] − 𝑞ch
+
(𝑅𝐻1𝑞2+ 𝑃𝐻2
+ 𝑇TM/𝐷TM + Δ𝑃4)
𝑅LP) .
(A.8)
Output Power (𝑃OUT). The output power of the system is afunction of torque at prime mover and speed input to thesystem as shown below:
𝑃OUT = 𝑇TM𝜔TM. (A.9)
At transformer element TF: 𝐷TM, torque at traction motorcan be written as
𝑇TM = 𝐷TM𝑃TM. (A.10)
Substituting (13) in (A.10) would arrive at
𝑇TM = 𝐷TM (𝑃2− 𝑅𝐻2𝑞3) . (A.11)
From (8) and (A.9), (A.12) can be written as
𝑇TM = 𝐷TM (𝑃MP − 𝑅𝐻1𝑞2− Δ𝑃42− 𝑅𝐻2𝑞3) . (A.12)
Substituting (6) in (A.12) would arrive at (A.13)
𝑇TM = 𝐷TM (
𝑇MP𝐷MP
− 𝑅𝐻1𝑞2− Δ𝑃42− 𝑅𝐻2𝑞3) . (A.13)
Speed of the traction motor in the transformer element TF:𝐷TM can be written as
𝜔TM =
𝑞tm𝐷TM
. (A.14)
Substituting (15) in (A.14) would arrive at
𝜔TM =
1
𝐷TM(𝑞2− 𝑞ch − (Δ𝑃
5− 𝑃set) 𝐺0
−𝐺PRVΔ𝑃5 −𝑃3
𝑅LM−
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
) .
(A.15)
From (5), (6), (36), and (A.15), the speed of the tractionmotorshaft can be written in terms of input prime mover speed as
𝜔TM =
1
𝐷TM(𝐷MP𝜔MP −
𝑇MP𝐷MP𝑅LP
−
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
−
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
−
𝑇TM𝐷TM𝑅LM
− 𝑃0gas(𝑉0gas)
𝛾 𝑑𝑃gas
𝑑𝑡
− (Δ𝑃5− 𝑃set) 𝐺0 − 𝐺PRVΔ𝑃5) .
(A.16)
Finally, the output power to the system is derived as a functionof system parameters as shown in (A.17), which correspondsto (40):
𝑃OUT = (
𝑇MP𝐷MP
− 𝑅𝐻1𝑞2− Δ𝑃42− 𝑅𝐻2𝑞3)
× (𝐷MP𝜔MP −𝑇MP
𝐷MP𝑅LP−
𝑉01
𝐵
𝑑𝑃MP𝑑𝑡
−
𝑉02
𝐵
𝑑𝑃3
𝑑𝑡
−
𝑇TM𝐷TM𝑅LM
− 𝑃0gas(𝑉0gas)
𝛾 𝑑𝑃gas
𝑑𝑡
− (Δ𝑃5− 𝑃set) 𝐺𝑜 − 𝐺PRVΔ𝑃5) .
(A.17)
Nomenclature
Δ𝑃1: Pressure drop across NRV 1 (Pa)
Δ𝑃2: Pressure drop across NRV 2 (Pa)
Δ𝑃3: Pressure drop across proportionalcontrol valve (Pa)
Δ𝑃4: Pressure drop across NRV 3 (Pa)
Δ𝑃5: Pressure drop across pressure reliefvalve (Pa)
𝐴: Area of orifice in proportional controlvalve (m2)
𝑎𝑠: Vehicle active front area (m2)
𝐵: Effective bulk modulus of hydraulic oil(Pa)
𝐵MP: Master pump mechanical efficiencyfriction coefficient (Nm s)
𝐵RP: Regeneration pump mechanicalefficiency friction coefficient (Nm s)
𝐵TM: Traction motor mechanical efficiencyfriction coefficient (Nm s)
𝐶𝐴: Compliance effect in hydropneumatic
accumulator (m3/Pa)𝐶𝑑: Coefficient of discharge (−)
𝐶MP: Compliance effect in master pump(m3/Pa)
𝐶RP: Compliance effect in regenerationpump (m3/Pa)
𝐶TM: Compliance effect in traction motor(m3/Pa)
𝐶𝑥: Air penetration coefficient (−)
𝐷MP: Volumetric displacement of masterpump (m3/rev)
𝑑rim: Diameter of the wheel (m)𝐷RP: Volumetric displacement of
regeneration pump (m3/rev)𝐷TM: Volumetric displacement of traction
motor (m3/rev)𝐹AD: Aerodynamic resistance force (N)𝐹RF: Rolling resistance force (N)𝐹VD: Resistance force due to vehicle
dynamics (N)

International Journal of Vehicular Technology 17
𝐹VM: Resistant force due to vehicle momentof inertia (N)
𝑔: Acceleration due to gravity (m/s2)𝐺LP: Conductance of proportional control
valve (m3/Pa-s)𝐺0: Conductance of open pressure relief
valve (m3/Pa-s)𝐺PRV: Conductance of closed pressure relief
valve (m3/Pa-s)𝐻: Height of the tire (m)𝐽VM: Moment of inertia in vehicle wheel
(kgm3)𝐽𝑤: Inertia of the wheel (kg-m2)
𝑚: Mass of the vehicle (kg)𝑚veh: Total mass of the vehicle (kg)𝑃2: Pressure at zero junction-2 end of
hydraulic hose 1 (Pa)𝑃3: Pressure at one junction-4 end of
hydraulic hose 2 (Pa)𝑃𝐴: Pressure of accumulator at any time (Pa)
𝑃𝐶: Pressure of accumulator during
regeneration (Pa)𝑃CH: Pressure at outlet port of NRV 1 (Pa)𝑃CL1: Cracking pressure of NRV 1 (Pa)𝑃CL2: Cracking pressure of NRV 2 (Pa)𝑃𝐷: Pressure of accumulator during
discharge (Pa)𝑃𝐻1: Pressure drop across hydraulic hose 1
(Pa)𝑃𝐻2: Pressure drop across hydraulic hose 2
(Pa)𝑃𝐻3: Pressure drop across hydraulic hose 3
(Pa)𝑃MP: Pressure at outlet port of master pump
(Pa)𝑃0gas: Precharge pressure of gas in the
accumulator (Pa)𝑃PV: Pressure at outlet port of proportional
control valve (Pa)𝑃RP: Pressure at regeneration pump outlet
(Pa)𝑃set: Set pressure of accumulator at any time
(Pa)𝑃TM: Pressure at inlet port of traction motor
(Pa)𝑞1: Actual flow rate from master pump
(m3/s)𝑞2: Flow rate at zero junction-2 end of
hydraulic hose 1 (m3/s)𝑞3: Flow rate to the traction motor (m3/s)
𝑞4: Actual flow rate to regeneration pump
(m3/s)𝑞𝑎: Flow rate at inlet port of accumulator
(m3/s)𝑞𝑐: Flow rate into the accumulator (m3/s)
𝑞ch: Flow rate from NRV 1 (m3/s)𝑞cm: Flow rate due to compressibility in
traction motor (m3/s)
𝑞cp: Flow loss due to compressibility of oil inmaster pump (m3/s)
𝑞cr: Flow loss due to compressibility of oil inregeneration pump (m3/s)
𝑞𝑑: Flow rate from the accumulator during
discharge (m3/s)𝑞lm: Flow rate due to leakage in traction
motor (m3/s)𝑞lp: Flow loss due to leakage in master
pump (m3/s)𝑞lr: Flow loss due to leakage in regeneration
pump (m3/s)𝑞mp: Ideal flow rate of master pump (m3/s)𝑞prv: Flow rate through pressure relief valve
(m3/s)𝑞pv: Flow rate at outlet port of proportional
control valve (m3/s)𝑞rp: Ideal flow rate of regeneration pump
(m3/s)𝑞tm: Actual flow rate to traction motor
(m3/s)𝑅AD: Aerodynamic resistance (Ns/m)𝑅𝐻1: Line resistance in hydraulic hose 1
(Pa-s/m3)𝑅𝐻2: Line resistance in hydraulic hose 2
(Pa-s/m3)𝑅𝐻3: Line resistance in hydraulic hose 3
(Pa-s/m3)𝑅LM: Traction motor internal leakage
resistance (Pa-s/m3)𝑅LP: Master pump internal leakage resistance
(Pa-s/m3)𝑅LR: Regeneration pump internal leakage
resistance (Pa-s/m3)𝑅𝑁1: Resistance at NRV 1 (Pa-s/m3)
𝑅𝑁2: Resistance at NRV 2 (Pa-s/m3)
𝑅𝑁3: Resistance at NRV 3 (Pa-s/m3)
𝑅PRV: Resistance offered by pressure reliefvalve (Pa-s/m3)
𝑅RF: Rolling friction resistance (Ns/m)𝑟𝑤: Radius of the wheel (m)
𝑇BMP: Torque loss due to mechanical frictionin master pump (Nm)
𝑇BRP: Torque loss due to mechanical frictionin regeneration pump (Nm)
𝑇BTM: Torque loss due to mechanical frictionin traction motor (Nm)
𝑇MP: Torque at master pump (Nm)𝑇PM: Torque at prime mover (Nm)𝑇RP: Torque at regeneration pump shaft
(Nm)𝑇TM: Torque at traction hydraulic motor shaft
(Nm)𝑇VD: Torque applied due to vehicle dynamics
(Nm)𝑉0gas: Initial volume of gas in the accumulator
(m3)

18 International Journal of Vehicular Technology
𝑉01: Volume of oil under pressure at zero
junction-1 (m3)𝑉02: Volume of oil under pressure at zero
junction-3 (m3)𝑉03: Volume of oil under pressure at zero
junction-4 (m3)𝑉𝑉: Linear velocity of the vehicle (m/s)
𝑉wind: Input wind velocity (m/s)𝑤: Width of the tire (m)𝛼: Slope of the road (degrees)𝛾: Isentropic index of gas (−)𝜌: Density of hydraulic oil (kg/m3)𝜌air: Density of the air (Kg/m3)𝜔MP: Speed at master pump shaft (rad/s)𝜔PM: Speed of prime mover (rad/s)𝜔TM: Speed at traction hydraulic motor shaft
(rad/s)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
References
[1] A. E. Fuhs, Hybrid Vehicles and the Future of Personal Trans-portation, CRC Press, 2009.
[2] E. Karden, S. Ploumen, B. Fricke, T. Miller, and K. Snyder,“Energy storage devices for future hybrid electric vehicles,”Journal of Power Sources, vol. 168, no. 1, pp. 2–11, 2007.
[3] J. Liu and H. Peng, “A systematic design approach for twoplanetary gear split hybrid vehicles,” Vehicle System Dynamics,vol. 48, no. 11, pp. 1395–1412, 2010.
[4] P. Shakouri, A. Ordys, P. Darnell, and P. Kavanagh, “Fuelefficiency by coasting in the vehicle,” International Journal ofVehicular Technology, vol. 2013, Article ID 391650, 14 pages,2013.
[5] C. Shen, P. Shan, and T. Gao, “A comprehensive overviewof hybrid electric vehicles,” International Journal of VehicularTechnology, vol. 2011, Article ID 571683, 7 pages, 2011.
[6] K. E. Rydberg, “Energy efficient hydraulic hybrid drives,” inProceedings of the 11th Scandinavian International Conference onFluid Power (SICFP ’09), pp. 1–14, Linkoping, June 2009.
[7] E. Dincmen and B. A. Guvenc, “A control strategy for parallelhybrid electric vehicles based on extremum seeking,” VehicleSystem Dynamics, vol. 50, no. 2, pp. 199–227, 2012.
[8] C. Ji, Y. Zhu, C. Liang, and X. Liu, “Simulation study on theoperating characteristics of a hybrid hydraulic passenger carwith a power split transmission,” International Journal of VehicleSystem Dynamics, vol. 51, no. 10, pp. 1518–1532, 2013.
[9] J. D. Van de Ven, M. W. Olson, and P. Y. Li, “Developmentof hydro-mechanical hydraulic hybrid drive with independentwheel torque control for an urban passenger vehicle,” in Pro-ceedings of the International Fluid Power Exposition, pp. 11–15,Las Vegas, Nev, USA, March 2008.
[10] Y. J. Kim and Z. Filipi, “Series hydraulic hybrid propulsion fora light truck- optimizing the thermostatic power management,”SAE Transactions, Journal of Engines, vol. 116, Article ID 2007-24-0080, pp. 1597–1609, 2007.
[11] B. Wu, C.-C. Lin, Z. Filipi, H. Peng, and D. Assanis, “Optimalpower management for a hydraulic hybrid delivery truck,”Vehicle System Dynamics, vol. 42, no. 1-2, pp. 23–40, 2004.
[12] Y. J. Kim and Z. Filipi, “Simulation study of a series hydraulichybrid propulsion system for a light truck,” Society of Automo-bile Engineers Paper 2007-01-4151,University ofMichigan, 2007.
[13] R. Ramakrishnan, S. S.Hiremath, andM. Singaperumal, “Powerbond graph modeling of series hydraulic hybrid system,” inProceedings of the International Conference on Fluid Mechanicsand Fluid Power, paper 608, pp. 1–8, IIT Madras, 2010.
[14] F. T. Elder and D. R. Otis, “Simulation of a hydraulic hybridpowertrain,” American Society of Mechanical Engineers, ArticleID 73-ICT-50, pp. 1–6, 1973.
[15] Z. Filipi and Y. J. Kim, “Hydraulic hybrid propulsion forheavy vehicles: combining the simulation and engine-in-the-loop techniques to maximize the fuel economy and emissionbenefits,” Oil and Gas Science and Technology, vol. 65, no. 1, pp.155–178, 2010.
[16] R. Ramakrishnan, S. S. Hiremath, andM. Singaperumal, “Theo-retical investigations on the effect of system parameters in serieshydraulic hybrid systemwith hydrostatic regenerative braking,”The Journal of Mechanical Science and Technology, vol. 26, no. 5,pp. 1321–1331, 2012.
[17] P. Wu, N. Luo, F. J. Fronczak, and N. H. Beachley, “Fuel econ-omy and operating characteristics of hydro-pneumatic energystorage automobile,” Tech. Rep. 851678, Society of AutomobileEngineers, 1985.
[18] D. Sinoquet, G. Rousseau, and Y. Milhau, “Design optimizationand optimal control for hybrid vehicles,” Optimization andEngineering, vol. 12, no. 1-2, pp. 199–213, 2011.
[19] S. S. Hiremath, R. Ramakrishnan, and M. Singaperumal,“Optimization of process parameters in series hydraulic hybridsystem,” in Proceedings of 13th Scandinavian Conference on FluidPower, pp. 199–205, Linkoping University, 2013.
[20] R. E. Kruse and T. A. Huls, “Development of the federal urbandriving schedule,” SAE Paper 730553, Society of AutomobileEngineers, 1973.
[21] M. Singaperumal and S. S. Hiremath, “Investigations on actua-tor dynamics through theoretical and finite element approach,”Mathematical Problems in Engineering, vol. 2010, Article ID191898, 22 pages, 2010.
[22] G. Pease and J. M. Henderson, “Simulation of a hydraulichybrid vehicle using bond graphs,” Journal of Mechanisms,Transmissions, and Automation in Design, vol. 110, no. 3, pp.365–369, 1988.
[23] W. Borutzky, “Bond graph modelling and simulation of mul-tidisciplinary systems—an introduction,” Simulation ModellingPractice andTheory, vol. 17, no. 1, pp. 3–21, 2009.
[24] B. W. Barnard and P. Dransfield, “Predicting response of aproposed hydraulic control system using bond graphs,” Trans-actions of the ASME Journal of Dynamic Systems, Measurementand Control, vol. 99, no. 1, pp. 1–8, 1977.
[25] D. Hrovat and W. E. Tobler, “Bond graph modeling of automo-tive power trains,” Journal of the Franklin Institute, vol. 328, no.5-6, pp. 623–662, 1991.
[26] P. Dransfield, “Using bond graph in simulating an Electro-Hydraulic System,” Journal of the Franklin Institute, vol. 308, no.3, pp. 173–184, 1979.
[27] M. Filippa, C. Mi, J. Shen, and R. C. Stevenson, “Modeling of ahybrid electric vehicle powertrain test cell using bond graphs,”IEEE Transactions on Vehicular Technology, vol. 54, no. 3, pp.837–845, 2005.

International Journal of Vehicular Technology 19
[28] Q. Zhao and F. Gao, “Bond graph modeling of hydraulicsix-degree-of-freedom motion simulator,” Proceedings of theInstitution of Mechanical Engineers C, vol. 226, no. 12, pp. 2887–2901, 2012.
[29] W. Borutzky, B. Barnard, and J. U. Thoma, “Describing bondgraph models of hydraulic components in Modelica,” Mathe-matics and Computers in Simulation, vol. 53, no. 4–6, pp. 381–387, 2000.
[30] S.-J. Lee and P.-H. Chang, “Modeling of a hydraulic excavatorbased on bond graph method and its parameter estimation,”Journal of Mechanical Science and Technology, vol. 26, no. 1, pp.195–204, 2012.
[31] C. Kleijn, “Getting Started with 20-sim 4. 1. 20-Sim cor-poration Pvt,” 2009, http://www.20sim.com/downloads/files/20sim41GettingStartedManual.pdf.
[32] K. Dasgupta, “Analysis of a hydrostatic transmission systemusing low speed high torque motor,” Mechanism and MachineTheory, vol. 35, no. 10, pp. 1481–1499, 2000.
[33] J. D. Head and M. C. Zerner, “A Broyden-Fletcher-Goldfarb-Shanno optimization procedure for molecular geometries,”International Journal of Chemical Physics Letters, vol. 122, no.3, pp. 264–270, 1985.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of