Embed Size (px)
Citation preview

Research ArticleControl of Synchronization and Stability for NonlinearComplex Dynamical Networks with Different DimensionalSimilar Nodes and Coupling Time-Varying Delay
Luo Yi-ping Luo Xin Deng Fei and Hu Jun-qiang
Hunan Institute of Engineering Xiangtan Hunan 411104 China
Correspondence should be addressed to Luo Xin 97646021qqcom
Received 10 January 2015 Revised 25 March 2015 Accepted 30 March 2015
Academic Editor Xinggang Yan
Copyright copy 2015 Luo Yi-ping et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper discusses the stability and synchronization for the nonlinear coupled complex networks with different dimensionalnodes and the external coupling satisfies the condition of dissipationThe definition of synchronization of the complex dynamicalnetworks is proposed as the manifold By Lyapunov stability theorem the decentralized controllers with similar parameters aredesigned to synchronize such dynamical networks asymptotically in which the characteristics are variable delayed Finally anumerical example is given to illustrate the effectiveness of the designed method
1 Introduction
Extensively existing in various phenomena of all kinds ofareas in the world such as social network and World WideWeb (WWW) complex dynamical networks have receivedmore and more attention in recent years [1 2] A lotof researchers have analyzed coupling complex dynamicalnetworks and got abundant results [3ndash7] Representativephenomenon in complex dynamical networks is synchro-nization among all dynamical nodes So in the past few yearssynchronization is the interesting subject for researchers [8ndash10] As a result widespread and varied criteria for stabilityand synchronization in dynamical network have been derived[11ndash14] For instance [13] discussed the adaptive pinningsynchronization in complex networks with nondelay andvariable delay coupling Reference [14] designed controllerswith synchronization conditions to achieve the synchroniza-tion of nonlinear coupled dynamic complex networks withunanimous delay Anyway the existing works on this topicnormally focus on the dynamical complex networkwith samedimensions of nodes
However attributes of individual nodemight be differentSuch as the Super Smart Grid every user as a node possessessimilar but discrepant equipment and every kind of equip-ment of user is one dimension of node By using different
dimensions of node to express different attributes of user wecan define the Super Smart Grid as complex networks withdifferent dimensional similar nodes
Though [15] mentioned that one synchronization schemeis applicable to the complex networks in which the nodescontain different dimensions both the nodes and couplingof nodes are linear In reality of engineering the nonlinearcoupling might be more complicated than the linear systemRecently [16] also researched coupled complex dynamicalnetworks with different dimensions nodes which discussedthe asymptotic synchronization of this network by decentral-ized dynamical compensation controllers without mention-ing time delay As we all know time delay widely exists in var-ious phenomena of nature engineering networks biologicalsystem and human social activities Generally speaking timedelay is inevitable because the information spread througha complex network that is characterized by limited speed oflong distance signal transmission Furthermore in some realsituations delay is varied which is called time-varying delay
All of the above discussions are to construct the nonlinearcomplex dynamical networks with different dimensionalsimilar nodes and coupling time-varying delay In this paperwe assumed that the dimension of individual node in thiscoupled complex dynamical network is different Since nodeshave some similar behaviors and state connections we define
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 271759 6 pageshttpdxdoiorg1011552015271759
2 Mathematical Problems in Engineering
the synchronization of the dynamical networks as the man-ifold Considering the time-varying delay in this networkthe decentralized control strategies are designed to achievethe stability and synchronization asymptotically for similarnodes of complex dynamical networks In the end numericalexamples are given to demonstrate the effectiveness of ourproposed results Finally Section 5 presents conclusions
2 Formulation of the Problemand Preliminaries
Here we consider a complex dynamical network which hassimilar nodes with different dimensions and coupling time-varying delay
119894= 119864
119894119909
119894
+
119873
sum
119895=1119895 =119894
119888
119894119895(ℎ
119894119895(119909
119895 (119905 minus 120591 (119905))) minus ℎ
119894119894(119909
119894 (119905 minus 120591 (119905))))
+ 119865
119894119906
119894
(1)
where the 119894th node satisfies 119894 = 1 2 119873 119909
119894isin 119877
119899119894 and119909
119894= (119909
1198941 119909
1198942 119909
119894119899119894)
119879 and 119906
119894isin 119877
119898times119899119894 is the control inputof node 119894 Respectively 119864
119894isin 119877
119899119894times119899119894 119865
119894isin 119877
119899119894times119898 both areknown as constant matrices The sufficiently smooth ℎ
119894119895are
the nonlinear vector fields defined as 119877
119899119895rarr 119877
119899119894(119894 119895 =
1 2 119873) 119888
119894119895isin 119877 are the outer coupling configuration
parameters 119888
119894119895shows the coupling strength and topology of
the dynamical network and satisfies 119888
119894119894= minus sum
119873
119895=1119895 =119894119888
119894119895 And
119888
119894119895= 0 if there is a connection between node 119894 and node
119895 (119894 = 119895) otherwise 119888
119894119895= 0 The diagonal elements of matrix
are defined as 119862 = (119888
119894119895)
119873times119873
Assumption 1 Consider network (1) of 119873 different dimen-sional nodes There exist 119873 matrixes 119878
119894isin 119877
1198991times119899119894(119878
119894= 0)
119861
119894isin 119877
119898times119899119894 and 119906
119894= 119861
119894119909
119894+ 119860
119894V119894conforming to
119878
119894(119864
119894+ 119865
119894119861
119894) = (119864
1+ 119865
1119860
1) 119878
119894
119878
119894119865
119894= 119865
1
(2)
where 119894 = 1 119873
Assumption 2 Under Assumption 1 conditions there exist119867
119894isin 119877
1198991times1198991 and 119894 = 1 119873 satisfying
119878
119894ℎ
119894119895(119909
119894 (119905 minus 120591 (119905))) = 119867
119894119878
119895119909
119895 (119905 minus 120591 (119905)) (3)
Remark 3 Notice every node of the complex dynamical net-work has its own dimensions and there is no certain connec-tion for the dimension among different nodes Assumption 1shows 119873 matrixes 119864
119894+ 119865
119894119861
119894have some same eigenvalues
It further means that the state of different nodes containssimilar behaviors
Lemma 4 (see [17]) For any vectors 119909 119910 isin 119877
119899times119899 and positivedefinite matrix 119882 isin 119877
119899times119899 the following matrix inequity holds2119909
119879119910 le 119909
119879119882119909 + 119910
119879119882
minus1119910
3 Synchronization for Complex Network byDecentralized Controllers
In this section based on Assumptions 1ndash2 and Lemma 4 atfirst we propose the definition of synchronization manifoldand then synthesise the decentralized dynamical compensa-tion controllers to synchronize the complex network asymp-totically
Definition 5 A complex dynamical network is said to achievethe asymptotical synchronization if
119878
1119909
1= 119878
2119909
2= sdot sdot sdot = 119878
119894119909
119894= 119904 (119905) as 119905 997888rarr infin (4)
where 119904(119905) isin 119877
1198991 is a solution of targeted state satisfying
119904 (119905) = 119865
1119904 (119905) (5)
For our synchronization scheme we define the error vectorsas
119890
119894= 119878
119894119909
119894minus 119904 (119905) (6)
From (5) and (6) Assumptions 1 and 2 the dynamical errorequation is given as
119890 = 119878
119894
119894minus 119904 (119905) = 119878
119894[
[
119864
119894119909
119894+ 119865
119894119906
119894
+
119873
sum
119895=1119895 =119894
119888
119894119895(ℎ
119894119895(119909
119895 (119905 minus 120591 (119905))) minus ℎ
119894119894(119909
119894 (119905 minus 120591 (119905))))
]
]
minus 119864
1119904 (119905) = 119878
119894[
[
(119864
119894+ 119865
119894119861
119894) 119909
119894+ 119865
119894119860
119894V119894
+
119873
sum
119895=1
119888
119894119895ℎ
119894119895(119909
119895 (119905 minus 120591 (119905)))
]
]
minus 119864
1119904 (119905) minus
119873
sum
119895=1
119888
119894119895119867
119894119904 (119905)
= (119864
119894+ 119865
1119861
1) 119878
119894119909
119894+ 119865
1119860
1V119894
+
119873
sum
119895=1
119888
119894119895119867
119894119878
119895119909
119895 (119905 minus 120591 (119905)) minus 119864
1119904 (119905)
minus
119873
sum
119895=1
119888
119894119895119867
119894119904 (119905 minus 120591 (119905)) = 119864
1119890
119894+ 119865
1119861
1119878
119894119909
119894+ 119865
1119860
1V1
+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(7)
where 119867
119894 isin 119877
1198991times1198991(119894 = 1 119873) are norm-bounded
which means there is a constant 119872 satisfying
1003817
1003817
1003817
1003817
119867
119894
1003817
1003817
1003817
1003817
le 119872 (8)
Mathematical Problems in Engineering 3
Theorem 6 In this section one decentralized dynamical com-pensation controller is designed to achieve our synchronizationas mentioned before which is
119906
119894= 119861
119894119909
119894+ 119860
119894V119894
V119894
= 119889
119894119860
minus1
1119865
minus1
1119877119890
119894minus 119860
minus1
1119861
1119878
119894119909
119894
(9)
where 119894 = 1 119873 constant 119896
119894gt 0 119865
minus1
1119877is a right inverse
matrix for 119865
1and satisfies 119865
1119865
minus1
1119877= 119868
1198991 which generally means
119865
1has full row rankHere from (9) error dynamical systems (7) become the
following form
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(10)
Select 119888 = max1lt119894lt119873
|119888
119894119895| and 120575 = max eig((119864
119879
1+ 119864
1)2) If there
exists a constant 120574 satisfying
(120575 + 119889
119894+
119888119872119873
2
+ 120574) lt 0 (11)
120574 gt
119888119872119873
2
gt 0(12)
then the error dynamical systems will achieve asymptoticalsynchronization
Proof First we select the following Lyapunov function can-didate
119881 (119905) =
119873
sum
119894=1
119890
119879
119894119890
119894
2
(13)
The derivative of 119881(119905) along the trajectories with errordynamical systems is
119881 (119905) =
119873
sum
119894=1
(
119890
119879
119894119890
119894
2
+
119890
119879
119894119890
119894
2
)
=
119873
sum
119894=1
[
119890
119879
119894(119865
119879
1+ 119865
1) 119890
119894
2
+ 119889
119894119890
119879
119894119890
119894]
+
119873
sum
119894=1
119873
sum
119895=1
119888
119894119895119890
119879
119894119867
119894119890
119895 (119905 minus 120591 (119905))
le (120575 + 119889) 119890
119879
119894119890
119894+
119873
sum
119894=1
119873
sum
119895=1
1003816
1003816
1003816
1003816
1003816
119888
119894119895
1003816
1003816
1003816
1003816
1003816
1003817
1003817
1003817
1003817
119867
119894
1003817
1003817
1003817
1003817
1003816
1003816
1003816
1003816
1003816
119890
119879
119894119890
119895 (119905 minus 120591 (119905))
1003816
1003816
1003816
1003816
1003816
(14)
where 119889 = max1lt119894lt119873
|119889
119894| By Lemma 4 (11) (12) and the
parameters we set before we derive the following inequation
119881 (119905) le (120575 + 119889 +
119888119872119873
2
)
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
le minus120574
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
(15)
If there exists a function 119892(120576) satisfying (12) where
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) (16)
we derive the following results
119892 (0) lt 0
119892 (infin) gt 0
119892 (120576) gt 0
(17)
Then from 0 to infin we can find 120576 gt 0 to suit
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) = 0(18)
Set
119872
0= supminus120591le119904le0
119881 (119904)
119882 (119905) = exp (120576120591) 119881 (119905) 119905 ge 0
(19)
119876 (119905) = 119882 (119905) minus ℎ119872
0 ℎ gt 1 (20)
Hence based on Lyapunov lemma it is available to make thestate of dynamics systems achieve synchronization asymp-totically under manifold (4) if we can prove 119876(119905) lt 0 119905 isin
(minus120591 infin)Firstly because of 119876(119905) = 119882(119905) minus ℎ119872
0 then 119876(119905) lt
0 119905 isin (minus120591 0) Secondly the target is to prove the followinginequation
119876 (119905) lt 0 119905 isin (0 infin) (21)
If there exists 119905
0isin (0 infin) which satisfies
119876 (119905
0) = 0
119876 (119905
0) gt 0
(22)
119876 (119905) lt 0 minus120591 le 119905 le 119905
0 (23)
4 Mathematical Problems in Engineering
the time derivative of 119876(119905
0) is
119876 (119905
0) = 120576119882 (119905
0) + exp (120576119905
0)
119881 (119905
0)
le 120576119882 (119905
0) minus 120574 exp (120576119905
0) 119881 (119905
0)
+
119888119872119873
2
exp (120576119905
0) 119881 (119905
0minus 120591 (119905))
le (120576 minus 120574) 119882 (119905
0)
+
119888119872119873
2
exp (120576120591) 119882 (119905
0minus 120591 (119905))
lt (120576 minus 120574 +
119888119872119873
2
exp (120576120591)) ℎ119872
0
(24)
It is clear that there is a contradiction between (22) and (24)so (19) is positive and according to hypothesis (19) we setℎ rarr 1 then
119881 (119905) lt exp (minus120576119905) 119872
0 (25)
The proving for Theorem 6 ends
Remark 7 Compared with other similar published resultsthis paper discussed the complex dynamical networks withtime-varying delay with designing different controllers Bydefining a new function 119881 we find a new way to proverelevant problems and get some results for complex dynam-ical networks with time-varying delay Under the researchconditions of similar literatures having no time delay it isavailable to accept that the method in this paper can simplifythe process and save cost of control while we discuss one kindof complex dynamical network without uncertain parts
4 Numerical Examples
The following dynamical error equation illustrates the theo-retical effectiveness of our proposed synchronization themesderived in Section 3 To put it simply we choose a ten-node network in which the first node has 2 dimensions thesecond node has 3 dimensions and the rest of them have 4dimensions Consider
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(26)
where we choose the upper bound about time-varying delayas 120591 = 01 and without loss of generality the parameters fordynamical error equation are chosen as follows
119864
1= (
minus2 5
0 3
)
119864
2= (
minus2 2 3
0 1 2
0 0 1
)
119864
3= sdot sdot sdot = 119864
10= (
minus2 2 3 5
0 1 2 minus1
0 0 1 0
0 0 0 rand + 2
)
119861
1= (
1 0
0 1
)
119861
2= (
1 minus1 minus2
0 1 minus1
)
119861
119894= (
1 minus1 minus2 minus3
0 1 minus1 1
)
119860
119895= (
minus1 0
3 2
)
(27)
where 119894 = 3 4 10 119895 = 1 2 10 Consider
119878
1= (
1 0
0 1
)
119878
2= (
1 3 0
0 1 0
)
119878
3= sdot sdot sdot = 119878
10= (
1 3 0 0
0 1 0 0
)
(28)
Consider the connection type for dynamical network so wechoose the outer coupling matrix as
119862
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
minus1 0 0 0 1 0 0 0 0 0
1 minus3 minus1 1 0 0 1 0 0 1
0 1 minus5 1 1 1 1 minus1 0 1
1 1 1 minus8 1 1 0 1 1 1
0 0 1 1 minus3 0 0 1 0 0
0 1 1 1 0 minus6 1 1 1 0
0 1 0 0 0 1 minus3 0 1 0
0 0 0 1 1 0 0 minus2 0 0
0 0 0 0 0 0 1 0 minus1 0
0 1 0 0 0 0 0 0 0 minus1
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)10times10
(29)
Mathematical Problems in Engineering 5
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
minus4
minus6
e
i1
(t)
t
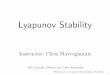
Figure 1 State of error for the first dimension of nodes
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
e
i2
(t)
t
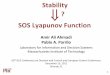
Figure 2 State of error for the second dimension of nodes
In this example initial conditions of each node are chosen as
119909
0
1= [1 2]
119909
0
2= [3 4 5]
119909
0
3= [minus05 2 1 4]
119909
0
4= [1 12 0 1]
119909
0
5= [minus5 4 3 5]
119909
0
6= [2 minus4 2 1]
119909
0
7= [minus2 3 minus1 1]
119909
0
8= [3 1 1 0]
119909
0
9= [0 5 3 2]
119909
0
10= [2 1 minus05 2]
(30)
Besides according to Theorem 6 and the assumptions weproposed before 119867
119894 lt 1 = 119872 and 120575 = 4 Also we are able
to find out 119889
119894lt minus10 after calculating these parameters The
results are shown in Figures 1 and 2 which exhibit that thedynamical networks achieve synchronization asymptotically
5 Conclusions
In this paper for the coupling time-varying delay com-plex networks with different dimensional similar nodes thedecentralized controllers are designed to synchronize suchnetworks According to the results of numerical example justif the nodes contain similar behaviors by Lyapunov stabilitytheorem we can find decentralized controllers with similarparameters to verify that our stability and synchronizationcontrol theme in this paper is effective
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by Natural Science Foundation ofChina under Grant no 11372107 and no 61174211
References
[1] H Liu J Chen J-A Lu andMCao ldquoGeneralized synchroniza-tion in complex dynamical networks via adaptive couplingsrdquoPhysica A vol 389 no 8 pp 1759ndash1770 2010
[2] X F Wang and G Chen ldquoComplex networks small-worldscale-free and beyondrdquo IEEE Circuits and Systems Magazinevol 3 no 1 pp 6ndash20 2003
[3] X Wang and J Z Huang ldquoEditorial uncertainty in learningfrom big datardquo Fuzzy Sets and Systems vol 258 pp 1ndash4 2015
[4] C Vitolo Y Elkhatib D Reusser C J Macleod and WBuytaert ldquoWeb technologies for environmental Big DatardquoEnvironmental Modelling amp Software vol 63 pp 185ndash198 2015
[5] W J Mallon ldquoBig datardquo Journal of Shoulder and Elbow Surgeryvol 22 no 9 p 1153 2013
[6] K Kambatla G Kollias V Kumar andAGrama ldquoTrends in bigdata analyticsrdquo Journal of Parallel and Distributed Computingvol 74 no 7 pp 2561ndash2573 2014
[7] C Zheng M Sun Y Tao and L Tian ldquoAdaptive-impulsivecontrol for generalized projective synchronization between twocomplex networkswith time delayrdquo inProceedings of the ChineseControl and Decision Conference (CCDC rsquo10) pp 3574ndash3578Xuzhou China May 2010
[8] H R Karimi ldquoRobust synchronization and fault detection ofuncertain master-slave systems withmixed time-varying delaysand nonlinear perturbationsrdquo International Journal of ControlAutomation and Systems vol 9 no 4 pp 671ndash680 2011
[9] D H Ji J H Park W J Yoo S C Won and S M LeeldquoSynchronization criterion for Lurrsquoe type complex dynamicalnetworks with time-varying delayrdquo Physics Letters A vol 374no 10 pp 1218ndash1227 2010
6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
the synchronization of the dynamical networks as the man-ifold Considering the time-varying delay in this networkthe decentralized control strategies are designed to achievethe stability and synchronization asymptotically for similarnodes of complex dynamical networks In the end numericalexamples are given to demonstrate the effectiveness of ourproposed results Finally Section 5 presents conclusions
2 Formulation of the Problemand Preliminaries
Here we consider a complex dynamical network which hassimilar nodes with different dimensions and coupling time-varying delay
119894= 119864
119894119909
119894
+
119873
sum
119895=1119895 =119894
119888
119894119895(ℎ
119894119895(119909
119895 (119905 minus 120591 (119905))) minus ℎ
119894119894(119909
119894 (119905 minus 120591 (119905))))
+ 119865
119894119906
119894
(1)
where the 119894th node satisfies 119894 = 1 2 119873 119909
119894isin 119877
119899119894 and119909
119894= (119909
1198941 119909
1198942 119909
119894119899119894)
119879 and 119906
119894isin 119877
119898times119899119894 is the control inputof node 119894 Respectively 119864
119894isin 119877
119899119894times119899119894 119865
119894isin 119877
119899119894times119898 both areknown as constant matrices The sufficiently smooth ℎ
119894119895are
the nonlinear vector fields defined as 119877
119899119895rarr 119877
119899119894(119894 119895 =
1 2 119873) 119888
119894119895isin 119877 are the outer coupling configuration
parameters 119888
119894119895shows the coupling strength and topology of
the dynamical network and satisfies 119888
119894119894= minus sum
119873
119895=1119895 =119894119888
119894119895 And
119888
119894119895= 0 if there is a connection between node 119894 and node
119895 (119894 = 119895) otherwise 119888
119894119895= 0 The diagonal elements of matrix
are defined as 119862 = (119888
119894119895)
119873times119873
Assumption 1 Consider network (1) of 119873 different dimen-sional nodes There exist 119873 matrixes 119878
119894isin 119877
1198991times119899119894(119878
119894= 0)
119861
119894isin 119877
119898times119899119894 and 119906
119894= 119861
119894119909
119894+ 119860
119894V119894conforming to
119878
119894(119864
119894+ 119865
119894119861
119894) = (119864
1+ 119865
1119860
1) 119878
119894
119878
119894119865
119894= 119865
1
(2)
where 119894 = 1 119873
Assumption 2 Under Assumption 1 conditions there exist119867
119894isin 119877
1198991times1198991 and 119894 = 1 119873 satisfying
119878
119894ℎ
119894119895(119909
119894 (119905 minus 120591 (119905))) = 119867
119894119878
119895119909
119895 (119905 minus 120591 (119905)) (3)
Remark 3 Notice every node of the complex dynamical net-work has its own dimensions and there is no certain connec-tion for the dimension among different nodes Assumption 1shows 119873 matrixes 119864
119894+ 119865
119894119861
119894have some same eigenvalues
It further means that the state of different nodes containssimilar behaviors
Lemma 4 (see [17]) For any vectors 119909 119910 isin 119877
119899times119899 and positivedefinite matrix 119882 isin 119877
119899times119899 the following matrix inequity holds2119909
119879119910 le 119909
119879119882119909 + 119910
119879119882
minus1119910
3 Synchronization for Complex Network byDecentralized Controllers
In this section based on Assumptions 1ndash2 and Lemma 4 atfirst we propose the definition of synchronization manifoldand then synthesise the decentralized dynamical compensa-tion controllers to synchronize the complex network asymp-totically
Definition 5 A complex dynamical network is said to achievethe asymptotical synchronization if
119878
1119909
1= 119878
2119909
2= sdot sdot sdot = 119878
119894119909
119894= 119904 (119905) as 119905 997888rarr infin (4)
where 119904(119905) isin 119877
1198991 is a solution of targeted state satisfying
119904 (119905) = 119865
1119904 (119905) (5)
For our synchronization scheme we define the error vectorsas
119890
119894= 119878
119894119909
119894minus 119904 (119905) (6)
From (5) and (6) Assumptions 1 and 2 the dynamical errorequation is given as
119890 = 119878
119894
119894minus 119904 (119905) = 119878
119894[
[
119864
119894119909
119894+ 119865
119894119906
119894
+
119873
sum
119895=1119895 =119894
119888
119894119895(ℎ
119894119895(119909
119895 (119905 minus 120591 (119905))) minus ℎ
119894119894(119909
119894 (119905 minus 120591 (119905))))
]
]
minus 119864
1119904 (119905) = 119878
119894[
[
(119864
119894+ 119865
119894119861
119894) 119909
119894+ 119865
119894119860
119894V119894
+
119873
sum
119895=1
119888
119894119895ℎ
119894119895(119909
119895 (119905 minus 120591 (119905)))
]
]
minus 119864
1119904 (119905) minus
119873
sum
119895=1
119888
119894119895119867
119894119904 (119905)
= (119864
119894+ 119865
1119861
1) 119878
119894119909
119894+ 119865
1119860
1V119894
+
119873
sum
119895=1
119888
119894119895119867
119894119878
119895119909
119895 (119905 minus 120591 (119905)) minus 119864
1119904 (119905)
minus
119873
sum
119895=1
119888
119894119895119867
119894119904 (119905 minus 120591 (119905)) = 119864
1119890
119894+ 119865
1119861
1119878
119894119909
119894+ 119865
1119860
1V1
+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(7)
where 119867
119894 isin 119877
1198991times1198991(119894 = 1 119873) are norm-bounded
which means there is a constant 119872 satisfying
1003817
1003817
1003817
1003817
119867
119894
1003817
1003817
1003817
1003817
le 119872 (8)
Mathematical Problems in Engineering 3
Theorem 6 In this section one decentralized dynamical com-pensation controller is designed to achieve our synchronizationas mentioned before which is
119906
119894= 119861
119894119909
119894+ 119860
119894V119894
V119894
= 119889
119894119860
minus1
1119865
minus1
1119877119890
119894minus 119860
minus1
1119861
1119878
119894119909
119894
(9)
where 119894 = 1 119873 constant 119896
119894gt 0 119865
minus1
1119877is a right inverse
matrix for 119865
1and satisfies 119865
1119865
minus1
1119877= 119868
1198991 which generally means
119865
1has full row rankHere from (9) error dynamical systems (7) become the
following form
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(10)
Select 119888 = max1lt119894lt119873
|119888
119894119895| and 120575 = max eig((119864
119879
1+ 119864
1)2) If there
exists a constant 120574 satisfying
(120575 + 119889
119894+
119888119872119873
2
+ 120574) lt 0 (11)
120574 gt
119888119872119873
2
gt 0(12)
then the error dynamical systems will achieve asymptoticalsynchronization
Proof First we select the following Lyapunov function can-didate
119881 (119905) =
119873
sum
119894=1
119890
119879
119894119890
119894
2
(13)
The derivative of 119881(119905) along the trajectories with errordynamical systems is
119881 (119905) =
119873
sum
119894=1
(
119890
119879
119894119890
119894
2
+
119890
119879
119894119890
119894
2
)
=
119873
sum
119894=1
[
119890
119879
119894(119865
119879
1+ 119865
1) 119890
119894
2
+ 119889
119894119890
119879
119894119890
119894]
+
119873
sum
119894=1
119873
sum
119895=1
119888
119894119895119890
119879
119894119867
119894119890
119895 (119905 minus 120591 (119905))
le (120575 + 119889) 119890
119879
119894119890
119894+
119873
sum
119894=1
119873
sum
119895=1
1003816
1003816
1003816
1003816
1003816
119888
119894119895
1003816
1003816
1003816
1003816
1003816
1003817
1003817
1003817
1003817
119867
119894
1003817
1003817
1003817
1003817
1003816
1003816
1003816
1003816
1003816
119890
119879
119894119890
119895 (119905 minus 120591 (119905))
1003816
1003816
1003816
1003816
1003816
(14)
where 119889 = max1lt119894lt119873
|119889
119894| By Lemma 4 (11) (12) and the
parameters we set before we derive the following inequation
119881 (119905) le (120575 + 119889 +
119888119872119873
2
)
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
le minus120574
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
(15)
If there exists a function 119892(120576) satisfying (12) where
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) (16)
we derive the following results
119892 (0) lt 0
119892 (infin) gt 0
119892 (120576) gt 0
(17)
Then from 0 to infin we can find 120576 gt 0 to suit
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) = 0(18)
Set
119872
0= supminus120591le119904le0
119881 (119904)
119882 (119905) = exp (120576120591) 119881 (119905) 119905 ge 0
(19)
119876 (119905) = 119882 (119905) minus ℎ119872
0 ℎ gt 1 (20)
Hence based on Lyapunov lemma it is available to make thestate of dynamics systems achieve synchronization asymp-totically under manifold (4) if we can prove 119876(119905) lt 0 119905 isin
(minus120591 infin)Firstly because of 119876(119905) = 119882(119905) minus ℎ119872
0 then 119876(119905) lt
0 119905 isin (minus120591 0) Secondly the target is to prove the followinginequation
119876 (119905) lt 0 119905 isin (0 infin) (21)
If there exists 119905
0isin (0 infin) which satisfies
119876 (119905
0) = 0
119876 (119905
0) gt 0
(22)
119876 (119905) lt 0 minus120591 le 119905 le 119905
0 (23)
4 Mathematical Problems in Engineering
the time derivative of 119876(119905
0) is
119876 (119905
0) = 120576119882 (119905
0) + exp (120576119905
0)
119881 (119905
0)
le 120576119882 (119905
0) minus 120574 exp (120576119905
0) 119881 (119905
0)
+
119888119872119873
2
exp (120576119905
0) 119881 (119905
0minus 120591 (119905))
le (120576 minus 120574) 119882 (119905
0)
+
119888119872119873
2
exp (120576120591) 119882 (119905
0minus 120591 (119905))
lt (120576 minus 120574 +
119888119872119873
2
exp (120576120591)) ℎ119872
0
(24)
It is clear that there is a contradiction between (22) and (24)so (19) is positive and according to hypothesis (19) we setℎ rarr 1 then
119881 (119905) lt exp (minus120576119905) 119872
0 (25)
The proving for Theorem 6 ends
Remark 7 Compared with other similar published resultsthis paper discussed the complex dynamical networks withtime-varying delay with designing different controllers Bydefining a new function 119881 we find a new way to proverelevant problems and get some results for complex dynam-ical networks with time-varying delay Under the researchconditions of similar literatures having no time delay it isavailable to accept that the method in this paper can simplifythe process and save cost of control while we discuss one kindof complex dynamical network without uncertain parts
4 Numerical Examples
The following dynamical error equation illustrates the theo-retical effectiveness of our proposed synchronization themesderived in Section 3 To put it simply we choose a ten-node network in which the first node has 2 dimensions thesecond node has 3 dimensions and the rest of them have 4dimensions Consider
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(26)
where we choose the upper bound about time-varying delayas 120591 = 01 and without loss of generality the parameters fordynamical error equation are chosen as follows
119864
1= (
minus2 5
0 3
)
119864
2= (
minus2 2 3
0 1 2
0 0 1
)
119864
3= sdot sdot sdot = 119864
10= (
minus2 2 3 5
0 1 2 minus1
0 0 1 0
0 0 0 rand + 2
)
119861
1= (
1 0
0 1
)
119861
2= (
1 minus1 minus2
0 1 minus1
)
119861
119894= (
1 minus1 minus2 minus3
0 1 minus1 1
)
119860
119895= (
minus1 0
3 2
)
(27)
where 119894 = 3 4 10 119895 = 1 2 10 Consider
119878
1= (
1 0
0 1
)
119878
2= (
1 3 0
0 1 0
)
119878
3= sdot sdot sdot = 119878
10= (
1 3 0 0
0 1 0 0
)
(28)
Consider the connection type for dynamical network so wechoose the outer coupling matrix as
119862
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
minus1 0 0 0 1 0 0 0 0 0
1 minus3 minus1 1 0 0 1 0 0 1
0 1 minus5 1 1 1 1 minus1 0 1
1 1 1 minus8 1 1 0 1 1 1
0 0 1 1 minus3 0 0 1 0 0
0 1 1 1 0 minus6 1 1 1 0
0 1 0 0 0 1 minus3 0 1 0
0 0 0 1 1 0 0 minus2 0 0
0 0 0 0 0 0 1 0 minus1 0
0 1 0 0 0 0 0 0 0 minus1
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)10times10
(29)
Mathematical Problems in Engineering 5
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
minus4
minus6
e
i1
(t)
t
Figure 1 State of error for the first dimension of nodes
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
e
i2
(t)
t
Figure 2 State of error for the second dimension of nodes
In this example initial conditions of each node are chosen as
119909
0
1= [1 2]
119909
0
2= [3 4 5]
119909
0
3= [minus05 2 1 4]
119909
0
4= [1 12 0 1]
119909
0
5= [minus5 4 3 5]
119909
0
6= [2 minus4 2 1]
119909
0
7= [minus2 3 minus1 1]
119909
0
8= [3 1 1 0]
119909
0
9= [0 5 3 2]
119909
0
10= [2 1 minus05 2]
(30)
Besides according to Theorem 6 and the assumptions weproposed before 119867
119894 lt 1 = 119872 and 120575 = 4 Also we are able
to find out 119889
119894lt minus10 after calculating these parameters The
results are shown in Figures 1 and 2 which exhibit that thedynamical networks achieve synchronization asymptotically
5 Conclusions
In this paper for the coupling time-varying delay com-plex networks with different dimensional similar nodes thedecentralized controllers are designed to synchronize suchnetworks According to the results of numerical example justif the nodes contain similar behaviors by Lyapunov stabilitytheorem we can find decentralized controllers with similarparameters to verify that our stability and synchronizationcontrol theme in this paper is effective
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by Natural Science Foundation ofChina under Grant no 11372107 and no 61174211
References
[1] H Liu J Chen J-A Lu andMCao ldquoGeneralized synchroniza-tion in complex dynamical networks via adaptive couplingsrdquoPhysica A vol 389 no 8 pp 1759ndash1770 2010
[2] X F Wang and G Chen ldquoComplex networks small-worldscale-free and beyondrdquo IEEE Circuits and Systems Magazinevol 3 no 1 pp 6ndash20 2003
[3] X Wang and J Z Huang ldquoEditorial uncertainty in learningfrom big datardquo Fuzzy Sets and Systems vol 258 pp 1ndash4 2015
[4] C Vitolo Y Elkhatib D Reusser C J Macleod and WBuytaert ldquoWeb technologies for environmental Big DatardquoEnvironmental Modelling amp Software vol 63 pp 185ndash198 2015
[5] W J Mallon ldquoBig datardquo Journal of Shoulder and Elbow Surgeryvol 22 no 9 p 1153 2013
[6] K Kambatla G Kollias V Kumar andAGrama ldquoTrends in bigdata analyticsrdquo Journal of Parallel and Distributed Computingvol 74 no 7 pp 2561ndash2573 2014
[7] C Zheng M Sun Y Tao and L Tian ldquoAdaptive-impulsivecontrol for generalized projective synchronization between twocomplex networkswith time delayrdquo inProceedings of the ChineseControl and Decision Conference (CCDC rsquo10) pp 3574ndash3578Xuzhou China May 2010
[8] H R Karimi ldquoRobust synchronization and fault detection ofuncertain master-slave systems withmixed time-varying delaysand nonlinear perturbationsrdquo International Journal of ControlAutomation and Systems vol 9 no 4 pp 671ndash680 2011
[9] D H Ji J H Park W J Yoo S C Won and S M LeeldquoSynchronization criterion for Lurrsquoe type complex dynamicalnetworks with time-varying delayrdquo Physics Letters A vol 374no 10 pp 1218ndash1227 2010
6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Theorem 6 In this section one decentralized dynamical com-pensation controller is designed to achieve our synchronizationas mentioned before which is
119906
119894= 119861
119894119909
119894+ 119860
119894V119894
V119894
= 119889
119894119860
minus1
1119865
minus1
1119877119890
119894minus 119860
minus1
1119861
1119878
119894119909
119894
(9)
where 119894 = 1 119873 constant 119896
119894gt 0 119865
minus1
1119877is a right inverse
matrix for 119865
1and satisfies 119865
1119865
minus1
1119877= 119868
1198991 which generally means
119865
1has full row rankHere from (9) error dynamical systems (7) become the
following form
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(10)
Select 119888 = max1lt119894lt119873
|119888
119894119895| and 120575 = max eig((119864
119879
1+ 119864
1)2) If there
exists a constant 120574 satisfying
(120575 + 119889
119894+
119888119872119873
2
+ 120574) lt 0 (11)
120574 gt
119888119872119873
2
gt 0(12)
then the error dynamical systems will achieve asymptoticalsynchronization
Proof First we select the following Lyapunov function can-didate
119881 (119905) =
119873
sum
119894=1
119890
119879
119894119890
119894
2
(13)
The derivative of 119881(119905) along the trajectories with errordynamical systems is
119881 (119905) =
119873
sum
119894=1
(
119890
119879
119894119890
119894
2
+
119890
119879
119894119890
119894
2
)
=
119873
sum
119894=1
[
119890
119879
119894(119865
119879
1+ 119865
1) 119890
119894
2
+ 119889
119894119890
119879
119894119890
119894]
+
119873
sum
119894=1
119873
sum
119895=1
119888
119894119895119890
119879
119894119867
119894119890
119895 (119905 minus 120591 (119905))
le (120575 + 119889) 119890
119879
119894119890
119894+
119873
sum
119894=1
119873
sum
119895=1
1003816
1003816
1003816
1003816
1003816
119888
119894119895
1003816
1003816
1003816
1003816
1003816
1003817
1003817
1003817
1003817
119867
119894
1003817
1003817
1003817
1003817
1003816
1003816
1003816
1003816
1003816
119890
119879
119894119890
119895 (119905 minus 120591 (119905))
1003816
1003816
1003816
1003816
1003816
(14)
where 119889 = max1lt119894lt119873
|119889
119894| By Lemma 4 (11) (12) and the
parameters we set before we derive the following inequation
119881 (119905) le (120575 + 119889 +
119888119872119873
2
)
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
le minus120574
119873
sum
119894=1
119890
119879
119894119890
119894
+
119888119872119873
2
119873
sum
119895=1
119890
119879
119895(119905 minus 120591 (119905)) 119890
119895 (119905 minus 120591 (119905))
(15)
If there exists a function 119892(120576) satisfying (12) where
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) (16)
we derive the following results
119892 (0) lt 0
119892 (infin) gt 0
119892 (120576) gt 0
(17)
Then from 0 to infin we can find 120576 gt 0 to suit
119892 (120576) = 120576 minus 120574 +
119888119872119873
2
exp (120576120591) = 0(18)
Set
119872
0= supminus120591le119904le0
119881 (119904)
119882 (119905) = exp (120576120591) 119881 (119905) 119905 ge 0
(19)
119876 (119905) = 119882 (119905) minus ℎ119872
0 ℎ gt 1 (20)
Hence based on Lyapunov lemma it is available to make thestate of dynamics systems achieve synchronization asymp-totically under manifold (4) if we can prove 119876(119905) lt 0 119905 isin
(minus120591 infin)Firstly because of 119876(119905) = 119882(119905) minus ℎ119872
0 then 119876(119905) lt
0 119905 isin (minus120591 0) Secondly the target is to prove the followinginequation
119876 (119905) lt 0 119905 isin (0 infin) (21)
If there exists 119905
0isin (0 infin) which satisfies
119876 (119905
0) = 0
119876 (119905
0) gt 0
(22)
119876 (119905) lt 0 minus120591 le 119905 le 119905
0 (23)
4 Mathematical Problems in Engineering
the time derivative of 119876(119905
0) is
119876 (119905
0) = 120576119882 (119905
0) + exp (120576119905
0)
119881 (119905
0)
le 120576119882 (119905
0) minus 120574 exp (120576119905
0) 119881 (119905
0)
+
119888119872119873
2
exp (120576119905
0) 119881 (119905
0minus 120591 (119905))
le (120576 minus 120574) 119882 (119905
0)
+
119888119872119873
2
exp (120576120591) 119882 (119905
0minus 120591 (119905))
lt (120576 minus 120574 +
119888119872119873
2
exp (120576120591)) ℎ119872
0
(24)
It is clear that there is a contradiction between (22) and (24)so (19) is positive and according to hypothesis (19) we setℎ rarr 1 then
119881 (119905) lt exp (minus120576119905) 119872
0 (25)
The proving for Theorem 6 ends
Remark 7 Compared with other similar published resultsthis paper discussed the complex dynamical networks withtime-varying delay with designing different controllers Bydefining a new function 119881 we find a new way to proverelevant problems and get some results for complex dynam-ical networks with time-varying delay Under the researchconditions of similar literatures having no time delay it isavailable to accept that the method in this paper can simplifythe process and save cost of control while we discuss one kindof complex dynamical network without uncertain parts
4 Numerical Examples
The following dynamical error equation illustrates the theo-retical effectiveness of our proposed synchronization themesderived in Section 3 To put it simply we choose a ten-node network in which the first node has 2 dimensions thesecond node has 3 dimensions and the rest of them have 4dimensions Consider
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(26)
where we choose the upper bound about time-varying delayas 120591 = 01 and without loss of generality the parameters fordynamical error equation are chosen as follows
119864
1= (
minus2 5
0 3
)
119864
2= (
minus2 2 3
0 1 2
0 0 1
)
119864
3= sdot sdot sdot = 119864
10= (
minus2 2 3 5
0 1 2 minus1
0 0 1 0
0 0 0 rand + 2
)
119861
1= (
1 0
0 1
)
119861
2= (
1 minus1 minus2
0 1 minus1
)
119861
119894= (
1 minus1 minus2 minus3
0 1 minus1 1
)
119860
119895= (
minus1 0
3 2
)
(27)
where 119894 = 3 4 10 119895 = 1 2 10 Consider
119878
1= (
1 0
0 1
)
119878
2= (
1 3 0
0 1 0
)
119878
3= sdot sdot sdot = 119878
10= (
1 3 0 0
0 1 0 0
)
(28)
Consider the connection type for dynamical network so wechoose the outer coupling matrix as
119862
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
minus1 0 0 0 1 0 0 0 0 0
1 minus3 minus1 1 0 0 1 0 0 1
0 1 minus5 1 1 1 1 minus1 0 1
1 1 1 minus8 1 1 0 1 1 1
0 0 1 1 minus3 0 0 1 0 0
0 1 1 1 0 minus6 1 1 1 0
0 1 0 0 0 1 minus3 0 1 0
0 0 0 1 1 0 0 minus2 0 0
0 0 0 0 0 0 1 0 minus1 0
0 1 0 0 0 0 0 0 0 minus1
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)10times10
(29)
Mathematical Problems in Engineering 5
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
minus4
minus6
e
i1
(t)
t
Figure 1 State of error for the first dimension of nodes
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
e
i2
(t)
t
Figure 2 State of error for the second dimension of nodes
In this example initial conditions of each node are chosen as
119909
0
1= [1 2]
119909
0
2= [3 4 5]
119909
0
3= [minus05 2 1 4]
119909
0
4= [1 12 0 1]
119909
0
5= [minus5 4 3 5]
119909
0
6= [2 minus4 2 1]
119909
0
7= [minus2 3 minus1 1]
119909
0
8= [3 1 1 0]
119909
0
9= [0 5 3 2]
119909
0
10= [2 1 minus05 2]
(30)
Besides according to Theorem 6 and the assumptions weproposed before 119867
119894 lt 1 = 119872 and 120575 = 4 Also we are able
to find out 119889
119894lt minus10 after calculating these parameters The
results are shown in Figures 1 and 2 which exhibit that thedynamical networks achieve synchronization asymptotically
5 Conclusions
In this paper for the coupling time-varying delay com-plex networks with different dimensional similar nodes thedecentralized controllers are designed to synchronize suchnetworks According to the results of numerical example justif the nodes contain similar behaviors by Lyapunov stabilitytheorem we can find decentralized controllers with similarparameters to verify that our stability and synchronizationcontrol theme in this paper is effective
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by Natural Science Foundation ofChina under Grant no 11372107 and no 61174211
References
[1] H Liu J Chen J-A Lu andMCao ldquoGeneralized synchroniza-tion in complex dynamical networks via adaptive couplingsrdquoPhysica A vol 389 no 8 pp 1759ndash1770 2010
[2] X F Wang and G Chen ldquoComplex networks small-worldscale-free and beyondrdquo IEEE Circuits and Systems Magazinevol 3 no 1 pp 6ndash20 2003
[3] X Wang and J Z Huang ldquoEditorial uncertainty in learningfrom big datardquo Fuzzy Sets and Systems vol 258 pp 1ndash4 2015
[4] C Vitolo Y Elkhatib D Reusser C J Macleod and WBuytaert ldquoWeb technologies for environmental Big DatardquoEnvironmental Modelling amp Software vol 63 pp 185ndash198 2015
[5] W J Mallon ldquoBig datardquo Journal of Shoulder and Elbow Surgeryvol 22 no 9 p 1153 2013
[6] K Kambatla G Kollias V Kumar andAGrama ldquoTrends in bigdata analyticsrdquo Journal of Parallel and Distributed Computingvol 74 no 7 pp 2561ndash2573 2014
[7] C Zheng M Sun Y Tao and L Tian ldquoAdaptive-impulsivecontrol for generalized projective synchronization between twocomplex networkswith time delayrdquo inProceedings of the ChineseControl and Decision Conference (CCDC rsquo10) pp 3574ndash3578Xuzhou China May 2010
[8] H R Karimi ldquoRobust synchronization and fault detection ofuncertain master-slave systems withmixed time-varying delaysand nonlinear perturbationsrdquo International Journal of ControlAutomation and Systems vol 9 no 4 pp 671ndash680 2011
[9] D H Ji J H Park W J Yoo S C Won and S M LeeldquoSynchronization criterion for Lurrsquoe type complex dynamicalnetworks with time-varying delayrdquo Physics Letters A vol 374no 10 pp 1218ndash1227 2010
6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
the time derivative of 119876(119905
0) is
119876 (119905
0) = 120576119882 (119905
0) + exp (120576119905
0)
119881 (119905
0)
le 120576119882 (119905
0) minus 120574 exp (120576119905
0) 119881 (119905
0)
+
119888119872119873
2
exp (120576119905
0) 119881 (119905
0minus 120591 (119905))
le (120576 minus 120574) 119882 (119905
0)
+
119888119872119873
2
exp (120576120591) 119882 (119905
0minus 120591 (119905))
lt (120576 minus 120574 +
119888119872119873
2
exp (120576120591)) ℎ119872
0
(24)
It is clear that there is a contradiction between (22) and (24)so (19) is positive and according to hypothesis (19) we setℎ rarr 1 then
119881 (119905) lt exp (minus120576119905) 119872
0 (25)
The proving for Theorem 6 ends
Remark 7 Compared with other similar published resultsthis paper discussed the complex dynamical networks withtime-varying delay with designing different controllers Bydefining a new function 119881 we find a new way to proverelevant problems and get some results for complex dynam-ical networks with time-varying delay Under the researchconditions of similar literatures having no time delay it isavailable to accept that the method in this paper can simplifythe process and save cost of control while we discuss one kindof complex dynamical network without uncertain parts
4 Numerical Examples
The following dynamical error equation illustrates the theo-retical effectiveness of our proposed synchronization themesderived in Section 3 To put it simply we choose a ten-node network in which the first node has 2 dimensions thesecond node has 3 dimensions and the rest of them have 4dimensions Consider
119890
119894= 119864
1119890
119894+ 119889
119894119890
119894+
119873
sum
119895=1
119888
119894119895119867
119894119890
119895 (119905 minus 120591 (119905))
(119894 = 1 119873)
(26)
where we choose the upper bound about time-varying delayas 120591 = 01 and without loss of generality the parameters fordynamical error equation are chosen as follows
119864
1= (
minus2 5
0 3
)
119864
2= (
minus2 2 3
0 1 2
0 0 1
)
119864
3= sdot sdot sdot = 119864
10= (
minus2 2 3 5
0 1 2 minus1
0 0 1 0
0 0 0 rand + 2
)
119861
1= (
1 0
0 1
)
119861
2= (
1 minus1 minus2
0 1 minus1
)
119861
119894= (
1 minus1 minus2 minus3
0 1 minus1 1
)
119860
119895= (
minus1 0
3 2
)
(27)
where 119894 = 3 4 10 119895 = 1 2 10 Consider
119878
1= (
1 0
0 1
)
119878
2= (
1 3 0
0 1 0
)
119878
3= sdot sdot sdot = 119878
10= (
1 3 0 0
0 1 0 0
)
(28)
Consider the connection type for dynamical network so wechoose the outer coupling matrix as
119862
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
minus1 0 0 0 1 0 0 0 0 0
1 minus3 minus1 1 0 0 1 0 0 1
0 1 minus5 1 1 1 1 minus1 0 1
1 1 1 minus8 1 1 0 1 1 1
0 0 1 1 minus3 0 0 1 0 0
0 1 1 1 0 minus6 1 1 1 0
0 1 0 0 0 1 minus3 0 1 0
0 0 0 1 1 0 0 minus2 0 0
0 0 0 0 0 0 1 0 minus1 0
0 1 0 0 0 0 0 0 0 minus1
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)10times10
(29)
Mathematical Problems in Engineering 5
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
minus4
minus6
e
i1
(t)
t
Figure 1 State of error for the first dimension of nodes
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
e
i2
(t)
t
Figure 2 State of error for the second dimension of nodes
In this example initial conditions of each node are chosen as
119909
0
1= [1 2]
119909
0
2= [3 4 5]
119909
0
3= [minus05 2 1 4]
119909
0
4= [1 12 0 1]
119909
0
5= [minus5 4 3 5]
119909
0
6= [2 minus4 2 1]
119909
0
7= [minus2 3 minus1 1]
119909
0
8= [3 1 1 0]
119909
0
9= [0 5 3 2]
119909
0
10= [2 1 minus05 2]
(30)
Besides according to Theorem 6 and the assumptions weproposed before 119867
119894 lt 1 = 119872 and 120575 = 4 Also we are able
to find out 119889
119894lt minus10 after calculating these parameters The
results are shown in Figures 1 and 2 which exhibit that thedynamical networks achieve synchronization asymptotically
5 Conclusions
In this paper for the coupling time-varying delay com-plex networks with different dimensional similar nodes thedecentralized controllers are designed to synchronize suchnetworks According to the results of numerical example justif the nodes contain similar behaviors by Lyapunov stabilitytheorem we can find decentralized controllers with similarparameters to verify that our stability and synchronizationcontrol theme in this paper is effective
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by Natural Science Foundation ofChina under Grant no 11372107 and no 61174211
References
[1] H Liu J Chen J-A Lu andMCao ldquoGeneralized synchroniza-tion in complex dynamical networks via adaptive couplingsrdquoPhysica A vol 389 no 8 pp 1759ndash1770 2010
[2] X F Wang and G Chen ldquoComplex networks small-worldscale-free and beyondrdquo IEEE Circuits and Systems Magazinevol 3 no 1 pp 6ndash20 2003
[3] X Wang and J Z Huang ldquoEditorial uncertainty in learningfrom big datardquo Fuzzy Sets and Systems vol 258 pp 1ndash4 2015
[4] C Vitolo Y Elkhatib D Reusser C J Macleod and WBuytaert ldquoWeb technologies for environmental Big DatardquoEnvironmental Modelling amp Software vol 63 pp 185ndash198 2015
[5] W J Mallon ldquoBig datardquo Journal of Shoulder and Elbow Surgeryvol 22 no 9 p 1153 2013
[6] K Kambatla G Kollias V Kumar andAGrama ldquoTrends in bigdata analyticsrdquo Journal of Parallel and Distributed Computingvol 74 no 7 pp 2561ndash2573 2014
[7] C Zheng M Sun Y Tao and L Tian ldquoAdaptive-impulsivecontrol for generalized projective synchronization between twocomplex networkswith time delayrdquo inProceedings of the ChineseControl and Decision Conference (CCDC rsquo10) pp 3574ndash3578Xuzhou China May 2010
[8] H R Karimi ldquoRobust synchronization and fault detection ofuncertain master-slave systems withmixed time-varying delaysand nonlinear perturbationsrdquo International Journal of ControlAutomation and Systems vol 9 no 4 pp 671ndash680 2011
[9] D H Ji J H Park W J Yoo S C Won and S M LeeldquoSynchronization criterion for Lurrsquoe type complex dynamicalnetworks with time-varying delayrdquo Physics Letters A vol 374no 10 pp 1218ndash1227 2010
6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
minus4
minus6
e
i1
(t)
t
Figure 1 State of error for the first dimension of nodes
0 05 1 15 2 25 3
0
2
4
6
8
10
12
minus2
e
i2
(t)
t
Figure 2 State of error for the second dimension of nodes
In this example initial conditions of each node are chosen as
119909
0
1= [1 2]
119909
0
2= [3 4 5]
119909
0
3= [minus05 2 1 4]
119909
0
4= [1 12 0 1]
119909
0
5= [minus5 4 3 5]
119909
0
6= [2 minus4 2 1]
119909
0
7= [minus2 3 minus1 1]
119909
0
8= [3 1 1 0]
119909
0
9= [0 5 3 2]
119909
0
10= [2 1 minus05 2]
(30)
Besides according to Theorem 6 and the assumptions weproposed before 119867
119894 lt 1 = 119872 and 120575 = 4 Also we are able
to find out 119889
119894lt minus10 after calculating these parameters The
results are shown in Figures 1 and 2 which exhibit that thedynamical networks achieve synchronization asymptotically
5 Conclusions
In this paper for the coupling time-varying delay com-plex networks with different dimensional similar nodes thedecentralized controllers are designed to synchronize suchnetworks According to the results of numerical example justif the nodes contain similar behaviors by Lyapunov stabilitytheorem we can find decentralized controllers with similarparameters to verify that our stability and synchronizationcontrol theme in this paper is effective
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by Natural Science Foundation ofChina under Grant no 11372107 and no 61174211
References
[1] H Liu J Chen J-A Lu andMCao ldquoGeneralized synchroniza-tion in complex dynamical networks via adaptive couplingsrdquoPhysica A vol 389 no 8 pp 1759ndash1770 2010
[2] X F Wang and G Chen ldquoComplex networks small-worldscale-free and beyondrdquo IEEE Circuits and Systems Magazinevol 3 no 1 pp 6ndash20 2003
[3] X Wang and J Z Huang ldquoEditorial uncertainty in learningfrom big datardquo Fuzzy Sets and Systems vol 258 pp 1ndash4 2015
[4] C Vitolo Y Elkhatib D Reusser C J Macleod and WBuytaert ldquoWeb technologies for environmental Big DatardquoEnvironmental Modelling amp Software vol 63 pp 185ndash198 2015
[5] W J Mallon ldquoBig datardquo Journal of Shoulder and Elbow Surgeryvol 22 no 9 p 1153 2013
[6] K Kambatla G Kollias V Kumar andAGrama ldquoTrends in bigdata analyticsrdquo Journal of Parallel and Distributed Computingvol 74 no 7 pp 2561ndash2573 2014
[7] C Zheng M Sun Y Tao and L Tian ldquoAdaptive-impulsivecontrol for generalized projective synchronization between twocomplex networkswith time delayrdquo inProceedings of the ChineseControl and Decision Conference (CCDC rsquo10) pp 3574ndash3578Xuzhou China May 2010
[8] H R Karimi ldquoRobust synchronization and fault detection ofuncertain master-slave systems withmixed time-varying delaysand nonlinear perturbationsrdquo International Journal of ControlAutomation and Systems vol 9 no 4 pp 671ndash680 2011
[9] D H Ji J H Park W J Yoo S C Won and S M LeeldquoSynchronization criterion for Lurrsquoe type complex dynamicalnetworks with time-varying delayrdquo Physics Letters A vol 374no 10 pp 1218ndash1227 2010
6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
[10] N Li Y Zhang J Hu and Z Nie ldquoSynchronization for generalcomplex dynamical networks with sampled-datardquo Neurocom-puting vol 74 no 5 pp 805ndash811 2011
[11] T Chen X Liu and W Lu ldquoPinning complex networks by asingle controllerrdquo IEEE Transactions on Circuits and Systems IRegular Papers vol 54 no 6 pp 1317ndash1326 2007
[12] X F Wang and G Chen ldquoPinning control of scale-freedynamical networksrdquo Physica A Statistical Mechanics and ItsApplications vol 310 no 3-4 pp 521ndash531 2002
[13] Y Liang X Wang and J Eustace ldquoAdaptive synchronization incomplex networks with non-delay and variable delay couplingsvia pinning controlrdquo Neurocomputing vol 123 pp 292ndash2982014
[14] B Zhuo ldquoPinning synchronization of a class of complexdynamical network with doupling delayrdquo International Journalof Nonlinear Science vol 9 no 2 pp 207ndash212 2010
[15] Y H Wang Y Q Fan Q Y Wang and Y Zhang ldquoStabilizationand synchronization of complex dynamical networks withdifferent dynamics of nodes via decentralized controllersrdquo IEEETransactions on Circuits and Systems I Regular Papers vol 59no 8 pp 1786ndash1795 2012
[16] L Zhang Y Wang and Q Wang ldquoSynchronization for non-linearly coupled complex dynamical networks with differentdimensional nodesrdquo in Proceedings of the 26th Chinese Controland Decision Conference (CCDC rsquo14) pp 3632ndash3637 IEEEChangsha China May- June 2014
[17] JWu and L Jiao ldquoSynchronization in complex delayed dynami-cal networks with nonsymmetric couplingrdquo Physica A vol 386no 1 pp 513ndash530 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of






![Appendix A Lyapunov Stability - Springer978-3-642-41572-2/1.pdf · Appendix A Lyapunov Stability Lyapunov stability theory [1] plays a central role in systems theory and engineering](https://img.pdfslide.us/doc/110x75/5ad5ee947f8b9a6d708d794b/appendix-a-lyapunov-stability-springer-978-3-642-41572-21pdfappendix-a-lyapunov.jpg)