Embed Size (px)
Citation preview

Research ArticleConstruction of Fuzzy Map for Autonomous Mobile RobotsBased on Fuzzy Confidence Model
Jung-Fu Hou1 Yau-Zen Chang1 Ming-Hsi Hsu1 Shih-Tseng Lee2 and Chieh-Tsai Wu2
1 Department of Mechanical Engineering Chang Gung University Taoyuan 33302 Taiwan2Department of Neurosurgery Chang Gung Memorial Hospital Taoyuan 33305 Taiwan
Correspondence should be addressed to Yau-Zen Chang zenmailcguedutw
Received 15 January 2014 Revised 23 April 2014 Accepted 25 April 2014 Published 16 June 2014
Academic Editor Leo Chen
Copyright copy 2014 Jung-Fu Hou et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper presents the use of fuzzy models to explicitly consider sensor uncertainty and finite resolution in solving the SLAM(simultaneous localization and mapping) problem for autonomous mobile robots The approach establishes fuzzy confidencemodels in describing occupied obstacles and available space The problem is transformed into an optimization task of minimizingthe alignment error between newly scanned local fuzzy maps and selected parts of a developing global fuzzy map In aligning localfuzzy maps into a global fuzzy map we developed a prediction strategy to crop the most potential part from the sensed local fuzzymaps to be overlapped with the global fuzzy map A mobile vehicle equipped with a laser range finder the Hokuyo URG-04LX isused to demonstrate the procedure of fuzzy map building Experimental results show that the proposed architecture is effective ingenerating a comprehensive global fuzzy map which is suitable for both human comprehension and path design during real-timenavigation
1 Introduction
An essential task of an autonomous mobile robot is todetermine its location and construct a map of its environ-ment usually denoted as the work of solving the SLAM(simultaneous localization andmapping) problem [1ndash3] Self-localization is about finding the location of a robot in a mapwhile mapping is about constructing a referable map whenthe robot ismoving in an unknownor changing environment
Autonomous map construction has been under extensiveresearch for decades [4ndash9] For instance Chong andKleeman[5] used a sonar sensor and a positioning sensor and Jaradatand Langari [6] used a sonar sensor in developing the OGM(occupancy grid map) method where the environment issimplified into occupied and vacant grids Guivant et al [7]used encoders in cooperation with a laser range finder forpositioningDavison andKita [8] combined an accelerometerand two dynamic video cameras to construct irregular mapsTomono [9] used baselines as the basis for a video camera tochoose the characteristic points for map reconstruction
There are various kinds of sensors developed for thesetasks such as sonar [10 11] laser range finders [12] and video
cameras [13] Sonar is effective in detecting range but only anarrow region can be detected at one time Laser range finderscan effectively provide 2D environmental information at highrefresh rate up to 10 frames per sec but may fail to senseblack objects and complex 3D obstacles Moreover videocameras can emulate the capability of human eyes but hugecomputing power is required for real-time implementation
An early work [14] proposed a fuzzy model for the sonarsensing but the paper lacks detailed procedures for the SLAMproblem Inspired by the research this paper presents the useof a fuzzymodel to explicitly consider sensor uncertainty andfinite resolution of laser range finders in solving the SLAMproblem
Our proposed system is realized by establishing a fuzzyconfidencemodel which is composed of sensed obstacles andassured space based on sensor readings The SLAM problemis transformed into an optimization task of minimizing thealignment error between newly scanned local fuzzymaps andselected parts of a developing global fuzzy map The task isthen solved by the Cuckoo search optimization algorithm[15 16] Being a nature-inspired meta-heuristic algorithm
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 526781 8 pageshttpdxdoiorg1011552014526781
2 Mathematical Problems in Engineering
0120588 minus 120575r 120588 r120588 + 120575r
f120588
K0
Figure 1 The profile of a confidence function 119891120588which varies
around a given range reading 120588
the algorithmcan efficiently provide a set of optimal solutionswithin a reasonable number of cost function evaluations
To ease the search a prediction strategy is applied suchthat only the most promising portions of the newly scannedlocal fuzzy maps and last fuzzy maps are involved in theregistration The search starts with adequate knowledge ofmoving direction which makes essentially no assumptionabout the environment and is able to incrementally build aglobal map in real time A specific laser range finder theHokuyo URG-04LX is used to demonstrate the use of theconfidence model in the building of fuzzy maps
2 Certainty Model of the Sensor
21 Characteristics of the Laser Range Finder Most dis-tance sensors such as laser range finders suffer from bothmeasurement error and finite resolution which introduceuncertainties deteriorating with distance Knowledge aboutthese uncertainties may be described explicitly by fuzzymembership functions in order to build confidence models
To model the knowledge of measurement error in termsof the degree of certainty confidence level for the existenceof an obstacle can be described as a function symmetric to agiven range reading 120588 Assuming that 1198700 is a parameter cor-responding to the maximum confidence level the confidencefunction 119891120588 can be described as [14]
119891120588 (119903) =
1198700 sdot [1 minus (119903 minus 120588
120575119903)2
] for 1003816100381610038161003816119903 minus 1205881003816100381610038161003816 le 120575119903
0 otherwise(1)
The profile of119891120588 is depicted in Figure 1 where 120575119903 is the boundofmeasurement error According to the figure the confidencelevel decreases along a parabolic shaped trajectory towardzero as the distance to the range reading 120588 increases
For a typical distance sensor the effects of finite lateralresolution can be formulated into another confidence func-tion similar to (1) Hence we create a hybrid function 119861120588120601
to represent the level of confidence for the combination ofmeasurement error and finite resolution as
119861120588120601 (119903 120579)
=
119870119903120579 sdot [1 minus (119903 minus 120588
120575119903)2
]
times[1 minus (120579 minus 120601
120575120579)2
] when 1003816100381610038161003816119903 minus 1205881003816100381610038161003816 le120575119903
1003816100381610038161003816120579 minus 1206011003816100381610038161003816 le120575120579
0 otherwise(2)
As depicted in Figure 2 the profile of the confidencelevel 119861120588120601 is in the polar coordinate system (119903 120579) which issymmetric to both the range reading 120588 and angular reading120601 where 120575119903 is the bound of longitudinal distance error and 120575120601is the bound of finite lateral resolution The confidence leveldecreases toward zero as the distance to the range reading 120588or angular reading 120601 increases
Information about the existence of obstacles is crucial forthe construction for maps providing valuable environmentknowledge to the human supervisor On the other hand theinformation of free space between the sensor and the obsta-cles is vital for navigation of moving robots since sensorscannot provide information behind obstaclesThe confidencefunction which describes the availability of free space fornavigation is defined as a function 119875120588120601(119903 120579) correspondingto a set of range reading 120588 and angular reading 120601 in the polarcoordinate system
119875120588120601 (119903 120579)
=
(119903 minus 120588
120575119903)2
sdot [1 minus (120579 minus 120593
120575120579)2
] when 120588 minus 120575119903 le 119903 le 1205881003816100381610038161003816120579 minus 120601
1003816100381610038161003816 le120575120579
1 minus (120579 minus 120593
120575120579)2
when 119903 lt 120588 minus 1205751199031003816100381610038161003816120579 minus 120601
1003816100381610038161003816 le 120575120579
0 otherwise(3)
The profile of 119875119903120579 is depicted in Figure 3 We have thatthe 3D shape is the opposite to that of Figure 2 According tothe figure we have full confidence about the available spacebetween the observer and a measured obstacle located at(120588 120601) On the contrary we have little confidence about thespace behind the sensed obstacle
22 Certainty Model of a Specific Laser Range Finder TheHokuyo URG-04LX is a popular laser range finder (LRF)which uses a 785 nm semiconductor laser beam It has a fixedscanning range of 60 to 300∘ with a 036∘ angular resolutionand a 100 msec scan rate The data transfer rate can be set at9Mbps when connected via USB
The LRF has a quoted range of effective measurementbetween 20 and 4095mmThemeasurement error isplusmn10mmfor distances of less than 1m For greater distances theerror is plusmn1 of the range readings [17 18] The variation of
Mathematical Problems in Engineering 3
Con
fiden
ce le
vel
120601 minus 120575120579
120601 + 120575120579
120601
120588 minus 120575r120588
120588 + 120575r
Figure 2 The confidence function 119861120588120601
of a distance sensor com-bines the effects of measurement error and finite resolution arounda set of range reading 120588 and angular reading 120601
Con
fiden
ce le
vel
120588 minus 120575r120588 120588 + 120575r
Figure 3 The confidence function 119875119903120579
represents the confidencein the availability of space based on range reading 120588 and angularreading 120601
measurement error in terms of measured distance is depictedin Figure 4 As confidence in measured values decreases withthe increase of measurement error the complementary curveto the measurement error curve is defined as the confidencecurve and illustrated in the figure which can be fitted by a 6thorder polynomial function
119870119903120579 (119903) = 470 times 10minus21 times 1199036 minus 596 times 10minus17 times 1199035 + 282
times 10minus13 times 1199034 minus 596 times 10minus10 times 1199033 + 456
times 10minus7 times 1199032 minus 112 times 10minus4 times 119903 + 076
(4)
The confidence level which is a function of range readingas shown in Figure 4 is used as the parameter 119870119903120579 in (2)with 120575120579 being 036∘ In order to further clarify how theconfidence levels vary with distance measure 5 confidencelevels with respect to corresponding obstacle detections aredemonstrated in Figure 5 where the dotted green curve isgenerated by the closed form of (4)
0 500 1000 1500 2000 2500 3000 3500 40000
20
40
Mea
sure
men
t err
or (m
m)
Range reading (mm)
0
05
1
Con
fiden
ce le
vel
Measurement error
Confidence level
Figure 4 Graphic illustration of measurement error as a functionof the range reading The complementary curve is used as the con-fidence function
0 500 1000 1500 2000minus1
minus05
00
02
04
06
08
Range reading (mm)
Con
fiden
ce
Figure 5 Profile of confidence functions corresponding to differentrange readings
23 Aggregation for Fuzzy Map Construction The construc-tion of a local fuzzy map of obstacles at time 119905 denoted as119872119900(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Occupied = 119872119900 (119905) = ⋃119896
119861119903120579 (120588119896 (119905) 120601119896 (119905)) (5)
Similarly a local fuzzy map of space at time 119905 denotedas 119872119904(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Space = 119872119904 (119905) = ⋃119896
119875119903120579 (120588119896 (119905) 120601119896 (119905)) (6)
4 Mathematical Problems in Engineering
1
2
(a) 2D fuzzy map
0
2000
4000
6000minus50000
5000
005
1
1
2
(b) 3D fuzzy map
Figure 6 Illustration of fuzzymaps showing both the occupied obstacles and available spaceThe space is in the darkest color in the diagrams
Furthermore to construct a fuzzy map simultaneouslysuitable for human comprehension and path design the oc-cupied obstacles and available space should be integratedtogether
120583Map = 119872all (119905) = (03 cup 119872119900 (119905)) cap 119872119904 (119905)
= min (max (03119872119900 (119905)) 119872119904 (119905)) (7)
where 119872119904(119905) is the complement of 119872119904(119905) and the value 03is selected to distinguish uncertain regions from assuredoccupied and space regions
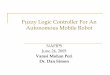
A practical implementation of (7) is demonstrated inFigure 6where the trianglesmarkedwith 1 and 2 are the initialand final positions respectively of a moving robot carrying alaser range finder Figures 6(a) and 6(b) are two-dimensionaldiagram and three-dimensional diagram respectively Notethat the space is in the darkest color showing the least levelwhich is suitable for path planningThe largest areaswith grayvalue assigned as 03 in this example are the regions behindsensed obstacles and hence unknown to the sensor
3 Experimental Study
31 Registration between Local Fuzzy Maps The concept ofregistration is based on the similarities between two localfuzzy maps sensed at different instances As a robot movesthe scene changes with the emergence and disappearanceof objects and boundaries These extra items on the mapsincrease the difficulty in the judge of matching between twosucceeding local maps leading to erroneous results To alle-viate the difficulty and enhance robustness and correctnessin the search of coordinate transformation for alignment aprediction algorithm is proposed The algorithm exploits theknowledge of currentmove direction to crop local maps fromthe sensed maps
Let119872119900(119905)|(119909119910) and119872119900(119905 + 1)|(119909119910)
be the local fuzzy mapssensed at 119905 and 119905 + 1 which have been transformed intorectangular coordinates from their polar coordinate counter-parts 119872119900(119905) and 119872119900(119905 + 1) respectively Besides let 119901119896(119905)
Mo(t)
Mo(t + 1)
Mo(t)
Mo(t + 1)t + 1
t
Obstacle A
Obstacle BΔXt
Figure 7 The cropping of local maps for registration by the use ofestimated motion
and 119901119895(119905 + 1) be position vectors with confidence values at119872119900(119905)|(119909119910) and119872119900(119905 + 1)|
(119909119910) respectivelyThe problem is to
find coordinate transformations 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905)such that the fuzzy maps are aligned with each other HereΔ119883119905 is a vector of displacement and rotation for the robotto move between 119905 and 119905 + 1 To begin with the predictionprocedure a rough estimation of Δ119883119905 denoted as Δ119883119905 isgenerated based on current moving command Partial localfuzzy maps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) that are cropped
from119872119900(119905 + 1) and119872119900(119905) are defined as
119900(119905 + 1)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119896 (119905) | 119901119896 (119905) isin 119872119900(119905)1003816100381610038161003816(119909119910)
cap 119872119900(119905 + 1)1003816100381610038161003816(119909119910)
(8)
119900(119905)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119895 (119905 + 1) |
119901119895 (119905 + 1) isin 119872119900 (119905 + 1)1003816100381610038161003816(119909119910) cap 119872119900 (119905)
1003816100381610038161003816(119909119910)
(9)
The relationship between the local fuzzy maps is illus-trated in Figure 7 Besides the homogeneous transformation
Mathematical Problems in Engineering 5
tt+1T
Cuckoo search
Update global fuzzy map
LRF
Confidencefuzzy model
Prediction and cropping
Coordinate transform
120590 120601
Mo(t) = Mo(t + 1)
Mo(t)|(xy) Mo(t + 1)|(xy)
Mo(t + 1)|(xy)
Mo(t + 1)|(r120579)
Mo(t)|(xy) Mo(t + 1)|(xy)
Figure 8 Flowchart of the generation of a global fuzzy map
matrices 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905) can be easily obtainedby exploiting the relationship 119905+1
119905 119879(Δ119883119905) = 119905119905+1119879 (Δ119883119905)
minus1
=119905
119905+1119879 (Δ119883119905)119879
32 System Flowchart This section presents an alternativesolution to simultaneous localization and mapping (SLAM)problem by direct registration of fuzzy maps of obstacles
As shown in the flowchart of Figure 8 the data 120588 120601sensed by the laser range finder are firstly aggregated intoa local fuzzy map 119872119900(119905 + 1) in polar coordinates andtransformed into rectangular coordinate system denoted as119872119900(119905 + 1)|
(119909119910)The prediction algorithmof (8) and (9) is then
used to crop from this local fuzzy map119872119900(119905)|(119909119910) and the lastlocal fuzzy map 119872119900(119905 + 1)|
(119909119910)to generate two fuzzy maps
119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) for registration by the Cuckoosearch [14] where a cost function of overlap between themis maximized The registration results in a homogeneoustransformationmatrix 119905
119905+1119879 to be used for the local fuzzymap119872119900(119905 + 1) to be integrated into the global fuzzy map in realtime The procedure iterates with the movement of the robotand the receiving of sensed data
The data 120588 120593 sensed by the laser range finder arefirstly aggregated into a local fuzzy map 119872119900(119905 + 1) in polarcoordinates and transformed into rectangular coordinatesystem denoted as 119872119900(119905 + 1)|
(119909119910) The prediction algorithm
of (8) and (9) is then used to crop from this local fuzzymap119872119900(119905)|(119909119910) and the last local fuzzy map119872119900(119905 + 1)|
(119909119910)to
generate two fuzzy maps 119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) forregistration by the Cuckoo search [15] where a cost functionof overlap between them is maximized The registrationresults in a homogeneous transformation matrix 119905
119905+1119879 to beused for the local fuzzy map 119872119900(119905 + 1) to be integrated intothe global fuzzy map in real timeThe procedure iterates withthe movement of the robot and the receiving of sensed data
Figure 9 illustrates a situation of two cropped local fuzzymaps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) for registration After
successful registration by the Cuckoo search an optimaltransformation matrix 119905
119905+1119879 is obtained that has maximumoverlapping for these two fuzzy maps as shown in Figure 10
4 Experimental Results
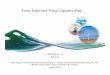
Amoving robot of three omniwheels (or poly wheels) is builtfor experimental study the robot is equipped with a HokuyoURG-04LX laser range finder and a notebook of Intel Core i5and 4GB RAM as shown in Figure 11
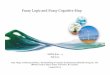
The proposed procedure was successfully implemented togenerate a global fuzzy map shown in Figure 12 In additionto the corridor a closed passage is selected for robustnessevaluation of the approachThe generated global fuzzymap isdemonstrated in Figure 13 showing that the proposedmethod
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
0120588 minus 120575r 120588 r120588 + 120575r
f120588
K0
Figure 1 The profile of a confidence function 119891120588which varies
around a given range reading 120588
the algorithmcan efficiently provide a set of optimal solutionswithin a reasonable number of cost function evaluations
To ease the search a prediction strategy is applied suchthat only the most promising portions of the newly scannedlocal fuzzy maps and last fuzzy maps are involved in theregistration The search starts with adequate knowledge ofmoving direction which makes essentially no assumptionabout the environment and is able to incrementally build aglobal map in real time A specific laser range finder theHokuyo URG-04LX is used to demonstrate the use of theconfidence model in the building of fuzzy maps
2 Certainty Model of the Sensor
21 Characteristics of the Laser Range Finder Most dis-tance sensors such as laser range finders suffer from bothmeasurement error and finite resolution which introduceuncertainties deteriorating with distance Knowledge aboutthese uncertainties may be described explicitly by fuzzymembership functions in order to build confidence models
To model the knowledge of measurement error in termsof the degree of certainty confidence level for the existenceof an obstacle can be described as a function symmetric to agiven range reading 120588 Assuming that 1198700 is a parameter cor-responding to the maximum confidence level the confidencefunction 119891120588 can be described as [14]
119891120588 (119903) =
1198700 sdot [1 minus (119903 minus 120588
120575119903)2
] for 1003816100381610038161003816119903 minus 1205881003816100381610038161003816 le 120575119903
0 otherwise(1)
The profile of119891120588 is depicted in Figure 1 where 120575119903 is the boundofmeasurement error According to the figure the confidencelevel decreases along a parabolic shaped trajectory towardzero as the distance to the range reading 120588 increases
For a typical distance sensor the effects of finite lateralresolution can be formulated into another confidence func-tion similar to (1) Hence we create a hybrid function 119861120588120601
to represent the level of confidence for the combination ofmeasurement error and finite resolution as
119861120588120601 (119903 120579)
=
119870119903120579 sdot [1 minus (119903 minus 120588
120575119903)2
]
times[1 minus (120579 minus 120601
120575120579)2
] when 1003816100381610038161003816119903 minus 1205881003816100381610038161003816 le120575119903
1003816100381610038161003816120579 minus 1206011003816100381610038161003816 le120575120579
0 otherwise(2)
As depicted in Figure 2 the profile of the confidencelevel 119861120588120601 is in the polar coordinate system (119903 120579) which issymmetric to both the range reading 120588 and angular reading120601 where 120575119903 is the bound of longitudinal distance error and 120575120601is the bound of finite lateral resolution The confidence leveldecreases toward zero as the distance to the range reading 120588or angular reading 120601 increases
Information about the existence of obstacles is crucial forthe construction for maps providing valuable environmentknowledge to the human supervisor On the other hand theinformation of free space between the sensor and the obsta-cles is vital for navigation of moving robots since sensorscannot provide information behind obstaclesThe confidencefunction which describes the availability of free space fornavigation is defined as a function 119875120588120601(119903 120579) correspondingto a set of range reading 120588 and angular reading 120601 in the polarcoordinate system
119875120588120601 (119903 120579)
=
(119903 minus 120588
120575119903)2
sdot [1 minus (120579 minus 120593
120575120579)2
] when 120588 minus 120575119903 le 119903 le 1205881003816100381610038161003816120579 minus 120601
1003816100381610038161003816 le120575120579
1 minus (120579 minus 120593
120575120579)2
when 119903 lt 120588 minus 1205751199031003816100381610038161003816120579 minus 120601
1003816100381610038161003816 le 120575120579
0 otherwise(3)
The profile of 119875119903120579 is depicted in Figure 3 We have thatthe 3D shape is the opposite to that of Figure 2 According tothe figure we have full confidence about the available spacebetween the observer and a measured obstacle located at(120588 120601) On the contrary we have little confidence about thespace behind the sensed obstacle
22 Certainty Model of a Specific Laser Range Finder TheHokuyo URG-04LX is a popular laser range finder (LRF)which uses a 785 nm semiconductor laser beam It has a fixedscanning range of 60 to 300∘ with a 036∘ angular resolutionand a 100 msec scan rate The data transfer rate can be set at9Mbps when connected via USB
The LRF has a quoted range of effective measurementbetween 20 and 4095mmThemeasurement error isplusmn10mmfor distances of less than 1m For greater distances theerror is plusmn1 of the range readings [17 18] The variation of
Mathematical Problems in Engineering 3
Con
fiden
ce le
vel
120601 minus 120575120579
120601 + 120575120579
120601
120588 minus 120575r120588
120588 + 120575r
Figure 2 The confidence function 119861120588120601
of a distance sensor com-bines the effects of measurement error and finite resolution arounda set of range reading 120588 and angular reading 120601
Con
fiden
ce le
vel
120588 minus 120575r120588 120588 + 120575r
Figure 3 The confidence function 119875119903120579
represents the confidencein the availability of space based on range reading 120588 and angularreading 120601
measurement error in terms of measured distance is depictedin Figure 4 As confidence in measured values decreases withthe increase of measurement error the complementary curveto the measurement error curve is defined as the confidencecurve and illustrated in the figure which can be fitted by a 6thorder polynomial function
119870119903120579 (119903) = 470 times 10minus21 times 1199036 minus 596 times 10minus17 times 1199035 + 282
times 10minus13 times 1199034 minus 596 times 10minus10 times 1199033 + 456
times 10minus7 times 1199032 minus 112 times 10minus4 times 119903 + 076
(4)
The confidence level which is a function of range readingas shown in Figure 4 is used as the parameter 119870119903120579 in (2)with 120575120579 being 036∘ In order to further clarify how theconfidence levels vary with distance measure 5 confidencelevels with respect to corresponding obstacle detections aredemonstrated in Figure 5 where the dotted green curve isgenerated by the closed form of (4)
0 500 1000 1500 2000 2500 3000 3500 40000
20
40
Mea
sure
men
t err
or (m
m)
Range reading (mm)
0
05
1
Con
fiden
ce le
vel
Measurement error
Confidence level
Figure 4 Graphic illustration of measurement error as a functionof the range reading The complementary curve is used as the con-fidence function
0 500 1000 1500 2000minus1
minus05
00
02
04
06
08
Range reading (mm)
Con
fiden
ce
Figure 5 Profile of confidence functions corresponding to differentrange readings
23 Aggregation for Fuzzy Map Construction The construc-tion of a local fuzzy map of obstacles at time 119905 denoted as119872119900(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Occupied = 119872119900 (119905) = ⋃119896
119861119903120579 (120588119896 (119905) 120601119896 (119905)) (5)
Similarly a local fuzzy map of space at time 119905 denotedas 119872119904(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Space = 119872119904 (119905) = ⋃119896
119875119903120579 (120588119896 (119905) 120601119896 (119905)) (6)
4 Mathematical Problems in Engineering
1
2
(a) 2D fuzzy map
0
2000
4000
6000minus50000
5000
005
1
1
2
(b) 3D fuzzy map
Figure 6 Illustration of fuzzymaps showing both the occupied obstacles and available spaceThe space is in the darkest color in the diagrams
Furthermore to construct a fuzzy map simultaneouslysuitable for human comprehension and path design the oc-cupied obstacles and available space should be integratedtogether
120583Map = 119872all (119905) = (03 cup 119872119900 (119905)) cap 119872119904 (119905)
= min (max (03119872119900 (119905)) 119872119904 (119905)) (7)
where 119872119904(119905) is the complement of 119872119904(119905) and the value 03is selected to distinguish uncertain regions from assuredoccupied and space regions
A practical implementation of (7) is demonstrated inFigure 6where the trianglesmarkedwith 1 and 2 are the initialand final positions respectively of a moving robot carrying alaser range finder Figures 6(a) and 6(b) are two-dimensionaldiagram and three-dimensional diagram respectively Notethat the space is in the darkest color showing the least levelwhich is suitable for path planningThe largest areaswith grayvalue assigned as 03 in this example are the regions behindsensed obstacles and hence unknown to the sensor
3 Experimental Study
31 Registration between Local Fuzzy Maps The concept ofregistration is based on the similarities between two localfuzzy maps sensed at different instances As a robot movesthe scene changes with the emergence and disappearanceof objects and boundaries These extra items on the mapsincrease the difficulty in the judge of matching between twosucceeding local maps leading to erroneous results To alle-viate the difficulty and enhance robustness and correctnessin the search of coordinate transformation for alignment aprediction algorithm is proposed The algorithm exploits theknowledge of currentmove direction to crop local maps fromthe sensed maps
Let119872119900(119905)|(119909119910) and119872119900(119905 + 1)|(119909119910)
be the local fuzzy mapssensed at 119905 and 119905 + 1 which have been transformed intorectangular coordinates from their polar coordinate counter-parts 119872119900(119905) and 119872119900(119905 + 1) respectively Besides let 119901119896(119905)
Mo(t)
Mo(t + 1)
Mo(t)
Mo(t + 1)t + 1
t
Obstacle A
Obstacle BΔXt
Figure 7 The cropping of local maps for registration by the use ofestimated motion
and 119901119895(119905 + 1) be position vectors with confidence values at119872119900(119905)|(119909119910) and119872119900(119905 + 1)|
(119909119910) respectivelyThe problem is to
find coordinate transformations 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905)such that the fuzzy maps are aligned with each other HereΔ119883119905 is a vector of displacement and rotation for the robotto move between 119905 and 119905 + 1 To begin with the predictionprocedure a rough estimation of Δ119883119905 denoted as Δ119883119905 isgenerated based on current moving command Partial localfuzzy maps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) that are cropped
from119872119900(119905 + 1) and119872119900(119905) are defined as
119900(119905 + 1)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119896 (119905) | 119901119896 (119905) isin 119872119900(119905)1003816100381610038161003816(119909119910)
cap 119872119900(119905 + 1)1003816100381610038161003816(119909119910)
(8)
119900(119905)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119895 (119905 + 1) |
119901119895 (119905 + 1) isin 119872119900 (119905 + 1)1003816100381610038161003816(119909119910) cap 119872119900 (119905)
1003816100381610038161003816(119909119910)
(9)
The relationship between the local fuzzy maps is illus-trated in Figure 7 Besides the homogeneous transformation
Mathematical Problems in Engineering 5
tt+1T
Cuckoo search
Update global fuzzy map
LRF
Confidencefuzzy model
Prediction and cropping
Coordinate transform
120590 120601
Mo(t) = Mo(t + 1)
Mo(t)|(xy) Mo(t + 1)|(xy)
Mo(t + 1)|(xy)
Mo(t + 1)|(r120579)
Mo(t)|(xy) Mo(t + 1)|(xy)
Figure 8 Flowchart of the generation of a global fuzzy map
matrices 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905) can be easily obtainedby exploiting the relationship 119905+1
119905 119879(Δ119883119905) = 119905119905+1119879 (Δ119883119905)
minus1
=119905
119905+1119879 (Δ119883119905)119879
32 System Flowchart This section presents an alternativesolution to simultaneous localization and mapping (SLAM)problem by direct registration of fuzzy maps of obstacles
As shown in the flowchart of Figure 8 the data 120588 120601sensed by the laser range finder are firstly aggregated intoa local fuzzy map 119872119900(119905 + 1) in polar coordinates andtransformed into rectangular coordinate system denoted as119872119900(119905 + 1)|
(119909119910)The prediction algorithmof (8) and (9) is then
used to crop from this local fuzzy map119872119900(119905)|(119909119910) and the lastlocal fuzzy map 119872119900(119905 + 1)|
(119909119910)to generate two fuzzy maps
119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) for registration by the Cuckoosearch [14] where a cost function of overlap between themis maximized The registration results in a homogeneoustransformationmatrix 119905
119905+1119879 to be used for the local fuzzymap119872119900(119905 + 1) to be integrated into the global fuzzy map in realtime The procedure iterates with the movement of the robotand the receiving of sensed data
The data 120588 120593 sensed by the laser range finder arefirstly aggregated into a local fuzzy map 119872119900(119905 + 1) in polarcoordinates and transformed into rectangular coordinatesystem denoted as 119872119900(119905 + 1)|
(119909119910) The prediction algorithm
of (8) and (9) is then used to crop from this local fuzzymap119872119900(119905)|(119909119910) and the last local fuzzy map119872119900(119905 + 1)|
(119909119910)to
generate two fuzzy maps 119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) forregistration by the Cuckoo search [15] where a cost functionof overlap between them is maximized The registrationresults in a homogeneous transformation matrix 119905
119905+1119879 to beused for the local fuzzy map 119872119900(119905 + 1) to be integrated intothe global fuzzy map in real timeThe procedure iterates withthe movement of the robot and the receiving of sensed data
Figure 9 illustrates a situation of two cropped local fuzzymaps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) for registration After
successful registration by the Cuckoo search an optimaltransformation matrix 119905
119905+1119879 is obtained that has maximumoverlapping for these two fuzzy maps as shown in Figure 10
4 Experimental Results
Amoving robot of three omniwheels (or poly wheels) is builtfor experimental study the robot is equipped with a HokuyoURG-04LX laser range finder and a notebook of Intel Core i5and 4GB RAM as shown in Figure 11
The proposed procedure was successfully implemented togenerate a global fuzzy map shown in Figure 12 In additionto the corridor a closed passage is selected for robustnessevaluation of the approachThe generated global fuzzymap isdemonstrated in Figure 13 showing that the proposedmethod
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Con
fiden
ce le
vel
120601 minus 120575120579
120601 + 120575120579
120601
120588 minus 120575r120588
120588 + 120575r
Figure 2 The confidence function 119861120588120601
of a distance sensor com-bines the effects of measurement error and finite resolution arounda set of range reading 120588 and angular reading 120601
Con
fiden
ce le
vel
120588 minus 120575r120588 120588 + 120575r
Figure 3 The confidence function 119875119903120579
represents the confidencein the availability of space based on range reading 120588 and angularreading 120601
measurement error in terms of measured distance is depictedin Figure 4 As confidence in measured values decreases withthe increase of measurement error the complementary curveto the measurement error curve is defined as the confidencecurve and illustrated in the figure which can be fitted by a 6thorder polynomial function
119870119903120579 (119903) = 470 times 10minus21 times 1199036 minus 596 times 10minus17 times 1199035 + 282
times 10minus13 times 1199034 minus 596 times 10minus10 times 1199033 + 456
times 10minus7 times 1199032 minus 112 times 10minus4 times 119903 + 076
(4)
The confidence level which is a function of range readingas shown in Figure 4 is used as the parameter 119870119903120579 in (2)with 120575120579 being 036∘ In order to further clarify how theconfidence levels vary with distance measure 5 confidencelevels with respect to corresponding obstacle detections aredemonstrated in Figure 5 where the dotted green curve isgenerated by the closed form of (4)
0 500 1000 1500 2000 2500 3000 3500 40000
20
40
Mea
sure
men
t err
or (m
m)
Range reading (mm)
0
05
1
Con
fiden
ce le
vel
Measurement error
Confidence level
Figure 4 Graphic illustration of measurement error as a functionof the range reading The complementary curve is used as the con-fidence function
0 500 1000 1500 2000minus1
minus05
00
02
04
06
08
Range reading (mm)
Con
fiden
ce
Figure 5 Profile of confidence functions corresponding to differentrange readings
23 Aggregation for Fuzzy Map Construction The construc-tion of a local fuzzy map of obstacles at time 119905 denoted as119872119900(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Occupied = 119872119900 (119905) = ⋃119896
119861119903120579 (120588119896 (119905) 120601119896 (119905)) (5)
Similarly a local fuzzy map of space at time 119905 denotedas 119872119904(119905) is based on the aggregation of several sets of rangereading and angular reading (120588119896 120579119896) in polar coordinates
120583Space = 119872119904 (119905) = ⋃119896
119875119903120579 (120588119896 (119905) 120601119896 (119905)) (6)
4 Mathematical Problems in Engineering
1
2
(a) 2D fuzzy map
0
2000
4000
6000minus50000
5000
005
1
1
2
(b) 3D fuzzy map
Figure 6 Illustration of fuzzymaps showing both the occupied obstacles and available spaceThe space is in the darkest color in the diagrams
Furthermore to construct a fuzzy map simultaneouslysuitable for human comprehension and path design the oc-cupied obstacles and available space should be integratedtogether
120583Map = 119872all (119905) = (03 cup 119872119900 (119905)) cap 119872119904 (119905)
= min (max (03119872119900 (119905)) 119872119904 (119905)) (7)
where 119872119904(119905) is the complement of 119872119904(119905) and the value 03is selected to distinguish uncertain regions from assuredoccupied and space regions
A practical implementation of (7) is demonstrated inFigure 6where the trianglesmarkedwith 1 and 2 are the initialand final positions respectively of a moving robot carrying alaser range finder Figures 6(a) and 6(b) are two-dimensionaldiagram and three-dimensional diagram respectively Notethat the space is in the darkest color showing the least levelwhich is suitable for path planningThe largest areaswith grayvalue assigned as 03 in this example are the regions behindsensed obstacles and hence unknown to the sensor
3 Experimental Study
31 Registration between Local Fuzzy Maps The concept ofregistration is based on the similarities between two localfuzzy maps sensed at different instances As a robot movesthe scene changes with the emergence and disappearanceof objects and boundaries These extra items on the mapsincrease the difficulty in the judge of matching between twosucceeding local maps leading to erroneous results To alle-viate the difficulty and enhance robustness and correctnessin the search of coordinate transformation for alignment aprediction algorithm is proposed The algorithm exploits theknowledge of currentmove direction to crop local maps fromthe sensed maps
Let119872119900(119905)|(119909119910) and119872119900(119905 + 1)|(119909119910)
be the local fuzzy mapssensed at 119905 and 119905 + 1 which have been transformed intorectangular coordinates from their polar coordinate counter-parts 119872119900(119905) and 119872119900(119905 + 1) respectively Besides let 119901119896(119905)
Mo(t)
Mo(t + 1)
Mo(t)
Mo(t + 1)t + 1
t
Obstacle A
Obstacle BΔXt
Figure 7 The cropping of local maps for registration by the use ofestimated motion
and 119901119895(119905 + 1) be position vectors with confidence values at119872119900(119905)|(119909119910) and119872119900(119905 + 1)|
(119909119910) respectivelyThe problem is to
find coordinate transformations 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905)such that the fuzzy maps are aligned with each other HereΔ119883119905 is a vector of displacement and rotation for the robotto move between 119905 and 119905 + 1 To begin with the predictionprocedure a rough estimation of Δ119883119905 denoted as Δ119883119905 isgenerated based on current moving command Partial localfuzzy maps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) that are cropped
from119872119900(119905 + 1) and119872119900(119905) are defined as
119900(119905 + 1)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119896 (119905) | 119901119896 (119905) isin 119872119900(119905)1003816100381610038161003816(119909119910)
cap 119872119900(119905 + 1)1003816100381610038161003816(119909119910)
(8)
119900(119905)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119895 (119905 + 1) |
119901119895 (119905 + 1) isin 119872119900 (119905 + 1)1003816100381610038161003816(119909119910) cap 119872119900 (119905)
1003816100381610038161003816(119909119910)
(9)
The relationship between the local fuzzy maps is illus-trated in Figure 7 Besides the homogeneous transformation
Mathematical Problems in Engineering 5
tt+1T
Cuckoo search
Update global fuzzy map
LRF
Confidencefuzzy model
Prediction and cropping
Coordinate transform
120590 120601
Mo(t) = Mo(t + 1)
Mo(t)|(xy) Mo(t + 1)|(xy)
Mo(t + 1)|(xy)
Mo(t + 1)|(r120579)
Mo(t)|(xy) Mo(t + 1)|(xy)
Figure 8 Flowchart of the generation of a global fuzzy map
matrices 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905) can be easily obtainedby exploiting the relationship 119905+1
119905 119879(Δ119883119905) = 119905119905+1119879 (Δ119883119905)
minus1
=119905
119905+1119879 (Δ119883119905)119879
32 System Flowchart This section presents an alternativesolution to simultaneous localization and mapping (SLAM)problem by direct registration of fuzzy maps of obstacles
As shown in the flowchart of Figure 8 the data 120588 120601sensed by the laser range finder are firstly aggregated intoa local fuzzy map 119872119900(119905 + 1) in polar coordinates andtransformed into rectangular coordinate system denoted as119872119900(119905 + 1)|
(119909119910)The prediction algorithmof (8) and (9) is then
used to crop from this local fuzzy map119872119900(119905)|(119909119910) and the lastlocal fuzzy map 119872119900(119905 + 1)|
(119909119910)to generate two fuzzy maps
119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) for registration by the Cuckoosearch [14] where a cost function of overlap between themis maximized The registration results in a homogeneoustransformationmatrix 119905
119905+1119879 to be used for the local fuzzymap119872119900(119905 + 1) to be integrated into the global fuzzy map in realtime The procedure iterates with the movement of the robotand the receiving of sensed data
The data 120588 120593 sensed by the laser range finder arefirstly aggregated into a local fuzzy map 119872119900(119905 + 1) in polarcoordinates and transformed into rectangular coordinatesystem denoted as 119872119900(119905 + 1)|
(119909119910) The prediction algorithm
of (8) and (9) is then used to crop from this local fuzzymap119872119900(119905)|(119909119910) and the last local fuzzy map119872119900(119905 + 1)|
(119909119910)to
generate two fuzzy maps 119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) forregistration by the Cuckoo search [15] where a cost functionof overlap between them is maximized The registrationresults in a homogeneous transformation matrix 119905
119905+1119879 to beused for the local fuzzy map 119872119900(119905 + 1) to be integrated intothe global fuzzy map in real timeThe procedure iterates withthe movement of the robot and the receiving of sensed data
Figure 9 illustrates a situation of two cropped local fuzzymaps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) for registration After
successful registration by the Cuckoo search an optimaltransformation matrix 119905
119905+1119879 is obtained that has maximumoverlapping for these two fuzzy maps as shown in Figure 10
4 Experimental Results
Amoving robot of three omniwheels (or poly wheels) is builtfor experimental study the robot is equipped with a HokuyoURG-04LX laser range finder and a notebook of Intel Core i5and 4GB RAM as shown in Figure 11
The proposed procedure was successfully implemented togenerate a global fuzzy map shown in Figure 12 In additionto the corridor a closed passage is selected for robustnessevaluation of the approachThe generated global fuzzymap isdemonstrated in Figure 13 showing that the proposedmethod
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
1
2
(a) 2D fuzzy map
0
2000
4000
6000minus50000
5000
005
1
1
2
(b) 3D fuzzy map
Figure 6 Illustration of fuzzymaps showing both the occupied obstacles and available spaceThe space is in the darkest color in the diagrams
Furthermore to construct a fuzzy map simultaneouslysuitable for human comprehension and path design the oc-cupied obstacles and available space should be integratedtogether
120583Map = 119872all (119905) = (03 cup 119872119900 (119905)) cap 119872119904 (119905)
= min (max (03119872119900 (119905)) 119872119904 (119905)) (7)
where 119872119904(119905) is the complement of 119872119904(119905) and the value 03is selected to distinguish uncertain regions from assuredoccupied and space regions
A practical implementation of (7) is demonstrated inFigure 6where the trianglesmarkedwith 1 and 2 are the initialand final positions respectively of a moving robot carrying alaser range finder Figures 6(a) and 6(b) are two-dimensionaldiagram and three-dimensional diagram respectively Notethat the space is in the darkest color showing the least levelwhich is suitable for path planningThe largest areaswith grayvalue assigned as 03 in this example are the regions behindsensed obstacles and hence unknown to the sensor
3 Experimental Study
31 Registration between Local Fuzzy Maps The concept ofregistration is based on the similarities between two localfuzzy maps sensed at different instances As a robot movesthe scene changes with the emergence and disappearanceof objects and boundaries These extra items on the mapsincrease the difficulty in the judge of matching between twosucceeding local maps leading to erroneous results To alle-viate the difficulty and enhance robustness and correctnessin the search of coordinate transformation for alignment aprediction algorithm is proposed The algorithm exploits theknowledge of currentmove direction to crop local maps fromthe sensed maps
Let119872119900(119905)|(119909119910) and119872119900(119905 + 1)|(119909119910)
be the local fuzzy mapssensed at 119905 and 119905 + 1 which have been transformed intorectangular coordinates from their polar coordinate counter-parts 119872119900(119905) and 119872119900(119905 + 1) respectively Besides let 119901119896(119905)
Mo(t)
Mo(t + 1)
Mo(t)
Mo(t + 1)t + 1
t
Obstacle A
Obstacle BΔXt
Figure 7 The cropping of local maps for registration by the use ofestimated motion
and 119901119895(119905 + 1) be position vectors with confidence values at119872119900(119905)|(119909119910) and119872119900(119905 + 1)|
(119909119910) respectivelyThe problem is to
find coordinate transformations 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905)such that the fuzzy maps are aligned with each other HereΔ119883119905 is a vector of displacement and rotation for the robotto move between 119905 and 119905 + 1 To begin with the predictionprocedure a rough estimation of Δ119883119905 denoted as Δ119883119905 isgenerated based on current moving command Partial localfuzzy maps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) that are cropped
from119872119900(119905 + 1) and119872119900(119905) are defined as
119900(119905 + 1)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119896 (119905) | 119901119896 (119905) isin 119872119900(119905)1003816100381610038161003816(119909119910)
cap 119872119900(119905 + 1)1003816100381610038161003816(119909119910)
(8)
119900(119905)10038161003816100381610038161003816(119909119910) = 119905+1
119905 119879 (Δ119883119905) 119901119895 (119905 + 1) |
119901119895 (119905 + 1) isin 119872119900 (119905 + 1)1003816100381610038161003816(119909119910) cap 119872119900 (119905)
1003816100381610038161003816(119909119910)
(9)
The relationship between the local fuzzy maps is illus-trated in Figure 7 Besides the homogeneous transformation
Mathematical Problems in Engineering 5
tt+1T
Cuckoo search
Update global fuzzy map
LRF
Confidencefuzzy model
Prediction and cropping
Coordinate transform
120590 120601
Mo(t) = Mo(t + 1)
Mo(t)|(xy) Mo(t + 1)|(xy)
Mo(t + 1)|(xy)
Mo(t + 1)|(r120579)
Mo(t)|(xy) Mo(t + 1)|(xy)
Figure 8 Flowchart of the generation of a global fuzzy map
matrices 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905) can be easily obtainedby exploiting the relationship 119905+1
119905 119879(Δ119883119905) = 119905119905+1119879 (Δ119883119905)
minus1
=119905
119905+1119879 (Δ119883119905)119879
32 System Flowchart This section presents an alternativesolution to simultaneous localization and mapping (SLAM)problem by direct registration of fuzzy maps of obstacles
As shown in the flowchart of Figure 8 the data 120588 120601sensed by the laser range finder are firstly aggregated intoa local fuzzy map 119872119900(119905 + 1) in polar coordinates andtransformed into rectangular coordinate system denoted as119872119900(119905 + 1)|
(119909119910)The prediction algorithmof (8) and (9) is then
used to crop from this local fuzzy map119872119900(119905)|(119909119910) and the lastlocal fuzzy map 119872119900(119905 + 1)|
(119909119910)to generate two fuzzy maps
119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) for registration by the Cuckoosearch [14] where a cost function of overlap between themis maximized The registration results in a homogeneoustransformationmatrix 119905
119905+1119879 to be used for the local fuzzymap119872119900(119905 + 1) to be integrated into the global fuzzy map in realtime The procedure iterates with the movement of the robotand the receiving of sensed data
The data 120588 120593 sensed by the laser range finder arefirstly aggregated into a local fuzzy map 119872119900(119905 + 1) in polarcoordinates and transformed into rectangular coordinatesystem denoted as 119872119900(119905 + 1)|
(119909119910) The prediction algorithm
of (8) and (9) is then used to crop from this local fuzzymap119872119900(119905)|(119909119910) and the last local fuzzy map119872119900(119905 + 1)|
(119909119910)to
generate two fuzzy maps 119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) forregistration by the Cuckoo search [15] where a cost functionof overlap between them is maximized The registrationresults in a homogeneous transformation matrix 119905
119905+1119879 to beused for the local fuzzy map 119872119900(119905 + 1) to be integrated intothe global fuzzy map in real timeThe procedure iterates withthe movement of the robot and the receiving of sensed data
Figure 9 illustrates a situation of two cropped local fuzzymaps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) for registration After
successful registration by the Cuckoo search an optimaltransformation matrix 119905
119905+1119879 is obtained that has maximumoverlapping for these two fuzzy maps as shown in Figure 10
4 Experimental Results
Amoving robot of three omniwheels (or poly wheels) is builtfor experimental study the robot is equipped with a HokuyoURG-04LX laser range finder and a notebook of Intel Core i5and 4GB RAM as shown in Figure 11
The proposed procedure was successfully implemented togenerate a global fuzzy map shown in Figure 12 In additionto the corridor a closed passage is selected for robustnessevaluation of the approachThe generated global fuzzymap isdemonstrated in Figure 13 showing that the proposedmethod
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
tt+1T
Cuckoo search
Update global fuzzy map
LRF
Confidencefuzzy model
Prediction and cropping
Coordinate transform
120590 120601
Mo(t) = Mo(t + 1)
Mo(t)|(xy) Mo(t + 1)|(xy)
Mo(t + 1)|(xy)
Mo(t + 1)|(r120579)
Mo(t)|(xy) Mo(t + 1)|(xy)
Figure 8 Flowchart of the generation of a global fuzzy map
matrices 119905+1119905 119879(Δ119883119905) and
119905
119905+1119879(Δ119883119905) can be easily obtainedby exploiting the relationship 119905+1
119905 119879(Δ119883119905) = 119905119905+1119879 (Δ119883119905)
minus1
=119905
119905+1119879 (Δ119883119905)119879
32 System Flowchart This section presents an alternativesolution to simultaneous localization and mapping (SLAM)problem by direct registration of fuzzy maps of obstacles
As shown in the flowchart of Figure 8 the data 120588 120601sensed by the laser range finder are firstly aggregated intoa local fuzzy map 119872119900(119905 + 1) in polar coordinates andtransformed into rectangular coordinate system denoted as119872119900(119905 + 1)|
(119909119910)The prediction algorithmof (8) and (9) is then
used to crop from this local fuzzy map119872119900(119905)|(119909119910) and the lastlocal fuzzy map 119872119900(119905 + 1)|
(119909119910)to generate two fuzzy maps
119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) for registration by the Cuckoosearch [14] where a cost function of overlap between themis maximized The registration results in a homogeneoustransformationmatrix 119905
119905+1119879 to be used for the local fuzzymap119872119900(119905 + 1) to be integrated into the global fuzzy map in realtime The procedure iterates with the movement of the robotand the receiving of sensed data
The data 120588 120593 sensed by the laser range finder arefirstly aggregated into a local fuzzy map 119872119900(119905 + 1) in polarcoordinates and transformed into rectangular coordinatesystem denoted as 119872119900(119905 + 1)|
(119909119910) The prediction algorithm
of (8) and (9) is then used to crop from this local fuzzymap119872119900(119905)|(119909119910) and the last local fuzzy map119872119900(119905 + 1)|
(119909119910)to
generate two fuzzy maps 119900(119905 + 1)|(119909119910)
and 119900(119905)|(119909119910) forregistration by the Cuckoo search [15] where a cost functionof overlap between them is maximized The registrationresults in a homogeneous transformation matrix 119905
119905+1119879 to beused for the local fuzzy map 119872119900(119905 + 1) to be integrated intothe global fuzzy map in real timeThe procedure iterates withthe movement of the robot and the receiving of sensed data
Figure 9 illustrates a situation of two cropped local fuzzymaps 119900(119905 + 1)|
(119909119910)and 119900(119905)|(119909119910) for registration After
successful registration by the Cuckoo search an optimaltransformation matrix 119905
119905+1119879 is obtained that has maximumoverlapping for these two fuzzy maps as shown in Figure 10
4 Experimental Results
Amoving robot of three omniwheels (or poly wheels) is builtfor experimental study the robot is equipped with a HokuyoURG-04LX laser range finder and a notebook of Intel Core i5and 4GB RAM as shown in Figure 11
The proposed procedure was successfully implemented togenerate a global fuzzy map shown in Figure 12 In additionto the corridor a closed passage is selected for robustnessevaluation of the approachThe generated global fuzzymap isdemonstrated in Figure 13 showing that the proposedmethod
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 9 Two local fuzzy maps before registration (a) 2D Fuzzy maps (b) 3D fuzzy maps
0
500
1000
1500
2000
2500
3000
3500
4000
minus1000010002000
M(t)
M(t + 1)
(a)
0
1000
2000
3000
4000
minus2000minus10000100020003000
005
1
M(t)
M(t + 1)
(b)
Figure 10 Two local fuzzy maps after registration showing maximum overlapping when compared with Figure 9 (a) 2D fuzzy maps (b) 3Dfuzzy maps
is effective in generating a comprehensible and useful fuzzymap of the environment by the introduction of confidencefuzzy model and the use of the laser range finder
5 Conclusion
This study proposes an effective SLAM algorithm usingfuzzy confidence functions of the laser range finder Thefuzzy confidence functions are functions of both range andanger readings of the sensor which explicitly take sensoruncertainty and finite resolution into consideration Based on
the fuzzy functions we are able to aggregate sensed data intolocal fuzzy maps by fuzzy union
In aligning local fuzzy maps into a global fuzzy map wedeveloped a prediction strategy to crop the most potentialpart to be overlapped with global fuzzy map from the sensedlocal fuzzy mapsThis strategy is experimentally evaluated tobe effective in finding homogeneous transformationmatricesby the Cuckoo search in real time
In addition to the occupied obstacles confidence fuzzyfunctions for available space are also implemented The inte-gration of occupied obstacles and available space allows us to
Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
(a) (b)
Figure 11 Experimental setup (a) A moving robot equipped with three omniwheels (b) A scenario of a corridor with obstacles along thepassage
(a)
0 2000 4000 6000 8000 10000 12000 14000 16000minus4000
minus2000
0
20000051
(b)
Figure 12 A global fuzzy map generated with the arrangement of Figure 11 (a) 2D fuzzy map (b) 3D fuzzy map
(a)
minus4000
minus2000
0
2000
4000
6000
8000
minus10000minus500005000
005
1
(b)
Figure 13 A comprehensive global fuzzy map of a closed passage generated by the proposed approach (a) 2D fuzzy map (b) 3D fuzzy map
generate a comprehensive global fuzzymap that is suitable forboth human comprehension and path design Performance ofthe proposed architecture is verified by experiment results ofa real-time mobile vehicle
Indeed fuzzy path planning seems to be more amenableto the proposed fuzzy map than its nonfuzzy counterpartsFurther research aimed at exploiting the benefits of fuzzymaps to include measurement errors and uncertainty as
8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
an integral part of amap to improve reliability and robustnessis needed to elucidate their role in navigation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are enormously grateful for the support fromthe National Science Foundation Taiwan under Contractnos NSC 100-2221-E-182-008 NSC 101-2221-E-182-006 andNSC 102-2221-E-182-073 Chang Gung University and ChangGung Memorial Hospital Taiwan under Contract nosCMRPD1C0021 CMRPD2C0051 and CMRPD2C0052
References
[1] H Durrant-Whyte and T Bailey ldquoSimultaneous localizationand mapping part Irdquo IEEE Robotics and Automation Magazinevol 13 no 2 pp 99ndash108 2006
[2] T Bailey and H Durrant-Whyte ldquoSimultaneous localizationand mapping (SLAM) part IIrdquo IEEE Robotics and AutomationMagazine vol 13 no 3 pp 108ndash117 2006
[3] T Sebastian Exploring Artificial Intelligence in the New Millen-nium Morgan Kaufmann San Francisco Calif USA 2003
[4] S Thrun W Burgard and D Fox Probabilistic Robotics TheMIT Press Cambridge Mass USA 2005
[5] K S Chong and L Kleeman ldquoMobile robot map building froman advanced sonar array and accurate odometryrdquo TechnicalReport MECSE 1996
[6] M A K Jaradat and R Langari ldquoLine map construction usinga mobile robot with a sonar sensorrdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo05) pp 1251ndash1256 Monterey Calif USAJuly 2005
[7] J Guivant ENebot and S Baiker ldquoAutonomous navigation andmap building using laser range sensors in outdoor applicationsrdquoJournal of Robotic System vol 17 no 10 pp 565ndash583 2000
[8] A J Davison and N Kita ldquo3D simultaneous localisationand map-building using active vision for a robot moving onundulating terrainrdquo in Proceedings of the IEEE Computer SocietyConference on Computer Vision and Pattern Recognition ppI384ndashI391 Kauai Hawaii USA December 2001
[9] M Tomono ldquo3-D localization andmapping using a single cam-era based on structure-from-motion with automatic baselineselectionrdquo in Proceedings of the IEEE International Conferenceon Robotics and Automation pp 3342ndash3347 Barcelona SpainApril 2005
[10] S Guadarrama and A Ruiz-Mayor ldquoApproximate robotic map-ping from sonar data by modeling perceptions with antonymsrdquoInformation Sciences vol 180 no 21 pp 4164ndash4188 2010
[11] S Noykov and C Roumenin ldquoOccupancy grids building bysonar andmobile robotrdquoRobotics andAutonomous Systems vol55 no 2 pp 162ndash175 2007
[12] A Diosi and L Kleeman ldquoFast laser scan matching using polarcoordinatesrdquo International Journal of Robotics Research vol 26no 10 pp 1125ndash1153 2007
[13] A J Davison I D Reid N D Molton and O StasseldquoMonoSLAM real-time single camera SLAMrdquo IEEE Transac-tions on Pattern Analysis andMachine Intelligence vol 29 no 6pp 1052ndash1067 2007
[14] G Oriolo G Ulivi and M Vendittelli ldquoFuzzy maps a new toolfor mobile robot perception and planningrdquo Journal of RoboticSystems vol 14 no 3 pp 179ndash197 1997
[15] X-S Yang and S Deb ldquoCuckoo search via Levy flightsrdquo inProceedings of the World Congress on Nature and BiologicallyInspired Computing (NABIC rsquo09) pp 210ndash214 CoimbatoreIndia December 2009
[16] X-S Yang ldquoBat algorithm and cuckoo search a tutorialrdquoStudies in Computational Intelligence vol 427 pp 421ndash434 2013
[17] K-H Lee and R Ehsani ldquoComparison of two 2D laser scannersfor sensing object distances shapes and surface patternsrdquoComputers and Electronics in Agriculture vol 60 no 2 pp 250ndash262 2008
[18] R Breda ldquoExperimentalmeasurement of parameters of the spa-tial scanner Hokuyo URG-04LXrdquo Przeglad Elektrotechnicznyvol 88 no 5 pp 132ndash135 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of