Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 148537 12 pageshttpdxdoiorg1011552013148537
Research ArticleApproximations for Large Deflection of a Cantilever Beam undera Terminal Follower Force and Nonlinear Pendulum
H Vaacutezquez-Leal1 Y Khan2 A L Herrera-May3 U Filobello-Nino1
A Sarmiento-Reyes4 V M Jimeacutenez-Fernaacutendez1 D Pereyra-Diacuteaz1 A Perez-Sesma1
R Castaneda-Sheissa1 A Diacuteaz-Sanchez4 and J Huerta-Chua5
1 Electronic Instrumentation and Atmospheric Sciences School University of Veracruz Cto Gonzalo Aguirre Beltran SN91000 Xalapa VER Mexico
2Department of Mathematics Zhejiang University Hangzhou 310027 China3Micro and Nanotechnology Research Center University of Veracruz Calzada Ruiz Cortines 455 94292 Boca del Rio VER Mexico4National Institute for Astrophysics Optics and Electronics Luis Enrique Erro No 1 Sta Marıa 72840 Tonantzintla PUE Mexico5 Facultad de Ingenieria Civil Universidad Veracruzana Venustiano Carranza SN Col Revolucion CP 93390 Poza RicaVER Mexico
Correspondence should be addressed to H Vazquez-Leal hvazquezuvmx
Received 13 November 2012 Accepted 16 January 2013
Academic Editor Gerhard-WilhelmWeber
Copyright copy 2013 H Vazquez-Leal et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
In theoretical mechanics field solutionmethods for nonlinear differential equations are very important becausemany problems aremodelled using such equations In particular large deflection of a cantilever beam under a terminal follower force and nonlinearpendulum problem can be described by the same nonlinear differential equation Therefore in this work we propose someapproximate solutions for both problems using nonlinearities distribution homotopy perturbationmethod homotopy perturbationmethod and combinations with Laplace-Pade posttreatment We will show the high accuracy of the proposed cantilever solutionswhich are in good agreement with other reported solutions Finally for the pendulum case the proposed approximation was usefulto predict accurately the period for an angle up to 17999999999∘ yielding a relative error of 001222747
1 Introduction
Solving nonlinear differential equations is an importantissue in science because many physical phenomena aremodelled using such equations During last century theapproximate solution of such equations was a task per-formed by hand usingmethods like the perturbationmethodNowadays symbolic software like Maple or Mathematicaallow researchers to calculate highly accurate approximatesolutions using newmethods like the homotopy perturbationmethod (HPM) [1ndash38] The HPMmethod is one of the mostfamous analytic techniques for nonlinear differential equa-tions which is widely applied in science and engineering
In [28 39] was reported the nonlinearities distributionhomotopy perturbation method (NDHPM) as an extendedversion of HPM that allows the distribution of the nonlin-earities between the different iterations of HPMmethodThe
main advantage of this process is the increase in the numberof possible iterations by constructing easier to solve linearequations for HPM procedure Additionally several worksreported that a Laplace-Pade posttreatment [40ndash49] of powerseries solutions obtained by HPM can improve accuracy andconvergence to the exact solution Therefore in this workwe propose the use of the aforementioned methods to obtainapproximate solutions for two nonlinear problems related byto same nonlinear differential equation The first one is thelarge deflection of a cantilever beam under a terminal fol-lower force [50ndash55] This kind of structures arises in marineriser and other practical applications of civil engineeringThe mathematical formulation of such a problem yields anonlinear two-point boundary-value problem which usuallycan be solved by numerical methods [50] The second one isthe nonlinear pendulum problem [56ndash58] which is modelled
2 Mathematical Problems in Engineering
by the same equation of the Cantileverrsquos case study Thependulum or systems containing the pendulums are well-studied complex phenomen [59] For both problems theresults exhibited high accuracy using our proposed solutionswhich are in good agreement to the results reported by otherworks In particular for the pendulum case we succeededto predict accurately the period until an initial angle up to17999999999
∘ achieving a relative error of 001222747This paper is organized as follows In Section 2 the basic
idea of theHPMmethod is providedWe give an introductionto NDHPM method in Section 3 In Section 4 the basicconcept of Pade approximants is explainedThe Laplace-Padecoupling with NDHPM and HPM methods is presented inSection 5 In Sections 6 and 7 the cantilever and pendulumproblems are solved respectively In addition a discussion onthe results is presented in Section 8 Finally a brief conclusionis given in Section 9
2 Basic Concept of HPM
It can be considered that a nonlinear differential equation canbe expressed as
119860 (119906) minus 119891 (119903) = 0 where 119903 isin Ω (1)
having boundary condition as
119861(119906120597119906
120597120578) = 0 where 119903 isin Γ (2)
where 119860 is a general differential operator 119891(119903) is a knownanalytic function 119861 is a boundary operator Γ is the boundaryof domain Ω and 120597119906120597120578 denotes differentiation along thenormal drawn outwards from Ω [50] The 119860 operatorgenerally can be divided into two operators 119871 and119873 whichare linear and nonlinear operators respectively Hence (1)can be rewritten as
119871 (119906) + 119873 (119906) minus 119891 (119903) = 0 (3)
Now a possible homotopy formulation is
119867(V 119901) = (1 minus 119901) [119871 (V) minus 119871 (1199060)]
+ 119901 (119871 (V) + 119873 (V) minus 119891 (119903)) = 0 119901 isin [0 1]
(4)
where 1199060is the initial approximation for (3) which satisfies
the boundary conditions and 119901 is known as the perturbationhomotopy parameter
For the HPMmethod [4ndash7] we assume that the solutionfor (4) can be written as a power series of 119901
V = 1199010
V0+ 1199011
V1+ 1199012
V2+ sdot sdot sdot (5)
Considering that 119901 rarr 1 results that the approximatesolution of (1) is
119906 = lim119901rarr1
V = V0+ V1+ V2+ sdot sdot sdot (6)
The series (6) is convergent on most cases as reported in[4 7 20 21]
3 HPM Method with NonlinearitiesDistribution
Recent reports [28 39] have introduced the NDHPMmethod which eases the searching process of solutions for (3)and reduces the complexity of solving differential equationsAs first step a modified homotopy is introduced
119867(V 119901) = (1 minus 119901) [119871 (V) minus 119871 (1199060)]
+ 119901 (119871 (V) + 119873 (V 119901) minus 119891 (119903 119901)) = 0
119901 isin [0 1]
(7)
It can be noticed that the homotopy function (7) isessentially the same as (4) except for the nonlinear operator119873 and the nonhomogeneous function 119891 which embedsthe homotopy parameter 119901 The arbitrary introduction of 119901within the differential equation is a strategy to redistribute thenonlinearities between the successive iterations of the HPMmethod and thus increase the probabilities of finding thesought solution
Again we establish that
V =infin
sum
119894=0
V119894119901119894
(8)
Considering that 119901 rarr 1 turns out that the approximatesolution for (1) is
119906 = lim119901rarr1
V =infin
sum
119894=0
V119894 (9)
The convergence of the NDHPM method is exposed in[28]
4 Padeacute Approximants
A rational approximation to 119891(119909) on [119886 119887] is the quotientof two polynomials 119875
119873(119909) and 119876
119872(119909) of degrees 119873 and 119872
respectively We use the notation 119877119873119872
(119909) to denote thisquotient The 119877
119873119872(119909) Pade approximations to a function
119891(119909) are given by [49 60]
119877119873119872
=119875119873(119909)
119876119872(119909)
for 119886 le 119909 le 119887 (10)
The method of Pade requires that 119891(119909) and its derivativeshould be continuous at 119909 = 0 The polynomials used in (10)are
119875119873(119909) = 119901
0+ 1199011119909 + 11990121199092
+ sdot sdot sdot + 119901119873(119909)
119876119872(119909) = 119902
0+ 1199021119909 + 11990221199092
+ sdot sdot sdot + 119902119872(119909)
(11)
The polynomials in (11) are constructed so that 119891(119909) and119877119873119872
(119909) agree at119909 = 0 and their derivatives up to119873+119872 agreeat 119909 = 0 For the case where 119876
0(119909) = 1 the approximation
is just the Maclaurin expansion for 119891(119909) For a fixed valueof 119873 + 119872 the error is the smallest when 119875
119873(119909) and 119876
119872(119909)
Mathematical Problems in Engineering 3
have the same degree or when119875119873(119909) has a degree higher than
119876119872(119909)Notice that the constant coefficient of119876
119872is 1199020minus1 This is
permissible because it can be noted that 0 and119877119873119872
(119909) are notchangedwhen both119875
119873(119909) and119876
119872(119909) are divided by the same
constant Hence the rational function119877119873119872
(119909) has119873+119872+1
unknown coefficients Assume that 119891(119909) is analytic and hasthe Maclaurin expansion
119891 (119909) = 1198860+ 1198861119909 + 11988621199092
+ sdot sdot sdot + 119886119896119909119896
+ sdot sdot sdot (12)
And from the difference 119891(119909)119876119872(119909) minus 119875
119873(119909) = 119885(119909)
lceil
infin
sum
119894=0
119886119894119909119894
rceillceil
119872
sum
119894=0
119902119894119909119894
rceil minus lceil
119873
sum
119894=0
119901119894119909119894
rceil = lceil
infin
sum
119894=119873+119872+1
119888119894119909119894
rceil (13)
The lower index 119895 = 119873 +119872 + 1 in the summation at theright side of (13) is chosen because the first119873+119872 derivativesof 119891(119883) and 119877
119873119872(119909) should agree at 119909 = 0
When the left side of (13) ismultiplied out and coefficientsof the powers of 119909119894 are set equal to zero for 119896 = 0 1 2 119873+
119872 this results in a system of119873 +119872 + 1 linear equations
1198860minus 1199010= 0
11990211198860+ 1198861minus 1199011= 0
11990221198860+ 11990211198861+ 1198862minus 1199012= 0
11990231198860+ 11990221198861+ 11990211198862+ 1198863minus 1199013= 0
119902119872119886119873minus119872
1003816100381610038161003816119902119872minus1119886119873minus119872minus11003816100381610038161003816 119886119873 minus 119901119873 = 0
(14)
119902119872119886119873minus119872+1
+ 119902119872minus1
119886119873minus119872+2
+ sdot sdot sdot + 1199021119886119873+ 119886119873+2
= 0
119902119872119886119873minus119872+2
+ 119902119872minus1
119886119873minus119872+3
+ sdot sdot sdot + 1199021119886119873+1
+ 119886119873+3
= 0
119902119872119886119873+ 119902119872119886119873+1
+ sdot sdot sdot + 1199021119886119873+119872+1
+ 119886119873+119872
= 0
(15)
Notice that in each equation the sum of the subscripts onthe factors of each product is the same and this sum increasesconsecutively from 0 to 119873 + 119872 The 119872 equations in (15)involve only the unknowns 119902
1 1199022 119902
119872and must be solved
first Then the equations in (14) are successively used to find1199011 1199012 119901
119873[49]
5 Laplace-Padeacute Posttreatment ofPower Series Solutions
The coupling of Laplace transform and Pade approximant[40] is used to deal with the lost information of truncatedpower series [41ndash49] The process can be summarized asfollows
(1) First Laplace transformation is applied to a powerseries solution obtained by HPM or NDHPM meth-ods
(2) Next 1119905 is written in place of 119904
Undeformed position
Deformed position
119875120572
119875120572
119904
119909
120579(0)
119910
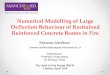
Figure 1 A cantilever beam under terminal follower force
(3) Afterwards we convert the transformed series into ameromorphic function by forming its Pade approxi-mant of order [119873119872]119873 and119872 are arbitrarily chosesbut they should be smaller than the power seriesorder In this step the Pade approximant extendsthe domain of the truncated series solution to obtainbetter accuracy and convergence
(4) Then 1119904 is written in place of 119905(5) Finally by using the inverse Laplace 119904 transformation
we obtain the modified approximate solution
The Laplace-Pade posttreatment of HPM and NDHPMmethods will be referred throughout the rest of this paper asLPHPM and LPNDHPM respectively
6 Solution of Cantilever Problem
Beams subjected to follower load arise in many problemsof structural engineering like lumbar spine in biomechanicssmart structures applications and loads applied to struc-tural components by cables in tension among others Thegoverning equations of such structures involve the effectsof nonlinearities due to large deformations and materialproperties [50ndash55]
In this work we study the large-deflection problem ofa cantilever beam under a tip-concentrated follower forceas depicted in Figure 1 The angle 120572 of inclination of theforce with respect to the deformed axis of the beam remainsunchanged during deformation We assume that the centerof the Cartesian system (119909 119910) is located at the fixed endand 120579 is the local angle of inclination of the centroidalaxis beam Therefore the mathematical formulation of thisproblem yields the following nonlinear two-point boundary-value problem
12057910158401015840
+ 120582 sin [120579 + 120572 minus 120579 (0)] = 0 1205791015840
(0) = 0 120579 (1) = 0
(16)
where prime denotes differentiation with respect to 120578 Addi-tionally the related dimensionless quantities are defined as
120578 =119904
119897 120585 =
119909
119897 120577 =
119910
119897 120582 =
1198972
119875
119864119897 (17)
where 119897 represents the length of the originally straight elasticcantilever beam 119864119897 is the flexural rigidity 119904 is the arc length
4 Mathematical Problems in Engineering
measured from the tip and 119875 is the terminal follower forcewith constant angle 120572
In [50] is reported that (16) can be reduced to an initial-value problem by the following transformation
120601 (120578) = 120579 (120578) + 120572 minus 120579 (0) (18)
resulting in the following initial value problem
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (19)
with the extra condition
120601 (1) minus 120572 + 120579 (0) = 0 (20)
where the slope of 120579(120578) can be obtained by using (18) and (20)resulting in the following
120579 (120578) = 120601 (120578) minus 120601 (1) (21)
Finally the deformed curve of beamaxis can be calculatedfrom solution of the slope 120579(120578) as
120585 (120578) = int
1
120578
cos (120579) 119889
120577 (120578) = int
1
120578
sin (120579) 119889(22)
61 Solution Obtained by Using NDHPMMethod In order tocircumvent difficulties due to the nonlinear sin term of (19)we propose to use a seventh-order Taylor series expansionresulting in the following
12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
) = 0
120601 (0) = 120572 1206011015840
(0) = 0
(23)
and by using (7) and (23) we establish the following homo-topy equation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
119901 minus1
5040V7
1199012
)) = 0
(24)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylorrsquos expansion and linearoperator 119871 is
V10158401015840
+ 120582V (25)
and trial function 1206010is
1206010= 120572 cos (120582120578) (26)
Substituting (8) into (24) and reordering and equatingterms with the same 119901 powers we obtain the following linearset of differential equations
1199010
V10158401015840
0
+ 120582V0= 0 V
0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V1minus1
6120582V3
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+ 120582V2+
1
120120582V5
0
minus1
2120582V2
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
1199013
V10158401015840
3
+ 120582V3minus1
2120582V0V2
1
minus1
5040120582V7
0
+1
24120582V4
0
V1minus1
2120582V2
0
V2= 0
V3(0) = 0 V
1015840
3
(0) = 0
(27)
By solving (27) we obtain
V0= 120572 cos (120578)
V1= minus
1
481205723
(minus cos (120578) +cos3 (120578) minus 3 sin (120578) 120578)
V2=
1
153601205725
(23 cos (120578)
minus 60cos2 (120578) sin (120578) 120578
+ 15 sin (120578) 120578 minus 35cos3 (120578)
+12cos5 (120578) minus 30 cos (120578) 2
1205782
)
V3= minus
1
51609601205727
( minus 593 cos (120578)
+ 1148cos3 (120578) minus 609 sin (120578) 120578
minus 735cos5 (120578) + 1365 cos (120578) 2
1205782
+ 180cos7 (120578) minus 1260 sin (120578)
times 120578cos7 (120578) 119909 + 2100cos2 (120578)
times sin (120578) 120578 + 210 sin (120578) 3
1205783
minus18902
cos3 (120578) 1205782) (28)
where = radic120582Substituting solutions (28) into (8) and calculating the
limit when 119901 rarr 1 results in the third-order approximation
120601 (120578) = lim119901rarr1
(
3
sum
119894=0
V119894119901119894
) = V0+ V1+ V2+ V3 (29)
Mathematical Problems in Engineering 5
62 Solution Calculated by Using HPM and LPHPMMethodsBy using (4) and (23) we establish the following homotopyequation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
minus1
5040V7
)) = 0
(30)
where linear operator 119871 is
V10158401015840
(31)
and trial function 1206010is
1206010= 120572 (32)
Substituting (5) into (30) and reordering and equatingterms with the same 119901 powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
minus1
5040120582V7
0
minus1
6120582V3
0
+ 120582V0+
1
120120582V5
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+1
24120582V4
0
V1+ 120582V1minus1
2120582V2
0
V1minus
1
720120582V6
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
(33)
By solving (33) we obtain
V0= 120572
V1= (
1
100801205821205727
+1
121205821205723
minus1
2120582120572 minus
1
2401205821205725
) 1205782
V2= (minus
1
12096001205822
12057211
minus1
18901205822
1205727
+1
1801205822
1205725
+41
14515201205822
1205729
minus1
361205822
1205723
+1
241205822
120572 +1
870912001205822
12057213
) 1205784
(34)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (34) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (35)
Expression (35) is too long to be written here neverthe-less it can be simplified if we consider a particular case Forinstance when 120572 = 1205872 it results in the following
119906 (120578) = minus 50091602 times 10minus5
12057810
1205825
minus 37265881 times 10minus5
1205784
1205822
+ 00041842058401205786
1205823
+ 7200012957 times 10minus17
12057836
12058218
minus 049992155051205782
120582
+ 348692001 times 10minus9
12057816
1205828
minus 436006 times 10minus12
12057826
12058213
minus 14 times 10minus15
12057834
12058217
minus 3618364186 times 10minus7
12057812
1205826
+ 789 times 10minus14
12057830
12058215
minus 2448310334 times 10minus12
12057824
12058212
+ 2455105652 times 10minus10
12057822
12058211
+ 0000000816190899312057814
1205827
minus 1686 times 10minus15
11990932
12058216
minus 1409132166 times 10minus8
12057818
1205829
+ 4567238741 times 10minus11
12057820
12058210
+ 707 times 10minus14
12057828
12058214
+ 1570796327 minus 7024412 times 10minus6
1205788
1205824
(36)By using (36) and (21) we can calculate approximately
the deflection angle 120579(0) nevertheless accuracy can beincreased applying the Laplace-Pade posttreatment FirstLaplace transformation is applied to (36) then 1120578 is writtenin place of 119904 Afterwards Pade approximant [88] is appliedand 1119904 is written in place of 120578 Finally by using theinverse Laplace 119904 transformation we obtain the modifiedapproximate solution For instance for 120582 = 1375 the resultof LPHPM is
119906 (120578) = minus 01295812455566806
times 10minus3 exp (minus5536309139671352120578)
times cos (1454887311024889120578)+ 03532982009243434
times 10minus4 exp (minus5536309139671352120578)
times sin (1454887311024889120578)
minus 02686099209980136
times 10minus1 cos (8783120641372600120578)
+ 1597916481385812
times cos (3150018868129787120578)minus 01295812455566806
times 10minus3 exp (5536309139671352120578)
times cos (1454887311024889120578)
minus 03532982009243434
times 10minus4 exp (5536309139671352120578)
times sin (1454887311024889120578) (37)
6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
by the same equation of the Cantileverrsquos case study Thependulum or systems containing the pendulums are well-studied complex phenomen [59] For both problems theresults exhibited high accuracy using our proposed solutionswhich are in good agreement to the results reported by otherworks In particular for the pendulum case we succeededto predict accurately the period until an initial angle up to17999999999
∘ achieving a relative error of 001222747This paper is organized as follows In Section 2 the basic
idea of theHPMmethod is providedWe give an introductionto NDHPM method in Section 3 In Section 4 the basicconcept of Pade approximants is explainedThe Laplace-Padecoupling with NDHPM and HPM methods is presented inSection 5 In Sections 6 and 7 the cantilever and pendulumproblems are solved respectively In addition a discussion onthe results is presented in Section 8 Finally a brief conclusionis given in Section 9
2 Basic Concept of HPM
It can be considered that a nonlinear differential equation canbe expressed as
119860 (119906) minus 119891 (119903) = 0 where 119903 isin Ω (1)
having boundary condition as
119861(119906120597119906
120597120578) = 0 where 119903 isin Γ (2)
where 119860 is a general differential operator 119891(119903) is a knownanalytic function 119861 is a boundary operator Γ is the boundaryof domain Ω and 120597119906120597120578 denotes differentiation along thenormal drawn outwards from Ω [50] The 119860 operatorgenerally can be divided into two operators 119871 and119873 whichare linear and nonlinear operators respectively Hence (1)can be rewritten as
119871 (119906) + 119873 (119906) minus 119891 (119903) = 0 (3)
Now a possible homotopy formulation is
119867(V 119901) = (1 minus 119901) [119871 (V) minus 119871 (1199060)]
+ 119901 (119871 (V) + 119873 (V) minus 119891 (119903)) = 0 119901 isin [0 1]
(4)
where 1199060is the initial approximation for (3) which satisfies
the boundary conditions and 119901 is known as the perturbationhomotopy parameter
For the HPMmethod [4ndash7] we assume that the solutionfor (4) can be written as a power series of 119901
V = 1199010
V0+ 1199011
V1+ 1199012
V2+ sdot sdot sdot (5)
Considering that 119901 rarr 1 results that the approximatesolution of (1) is
119906 = lim119901rarr1
V = V0+ V1+ V2+ sdot sdot sdot (6)
The series (6) is convergent on most cases as reported in[4 7 20 21]
3 HPM Method with NonlinearitiesDistribution
Recent reports [28 39] have introduced the NDHPMmethod which eases the searching process of solutions for (3)and reduces the complexity of solving differential equationsAs first step a modified homotopy is introduced
119867(V 119901) = (1 minus 119901) [119871 (V) minus 119871 (1199060)]
+ 119901 (119871 (V) + 119873 (V 119901) minus 119891 (119903 119901)) = 0
119901 isin [0 1]
(7)
It can be noticed that the homotopy function (7) isessentially the same as (4) except for the nonlinear operator119873 and the nonhomogeneous function 119891 which embedsthe homotopy parameter 119901 The arbitrary introduction of 119901within the differential equation is a strategy to redistribute thenonlinearities between the successive iterations of the HPMmethod and thus increase the probabilities of finding thesought solution
Again we establish that
V =infin
sum
119894=0
V119894119901119894
(8)
Considering that 119901 rarr 1 turns out that the approximatesolution for (1) is
119906 = lim119901rarr1
V =infin
sum
119894=0
V119894 (9)
The convergence of the NDHPM method is exposed in[28]
4 Padeacute Approximants
A rational approximation to 119891(119909) on [119886 119887] is the quotientof two polynomials 119875
119873(119909) and 119876
119872(119909) of degrees 119873 and 119872
respectively We use the notation 119877119873119872
(119909) to denote thisquotient The 119877
119873119872(119909) Pade approximations to a function
119891(119909) are given by [49 60]
119877119873119872
=119875119873(119909)
119876119872(119909)
for 119886 le 119909 le 119887 (10)
The method of Pade requires that 119891(119909) and its derivativeshould be continuous at 119909 = 0 The polynomials used in (10)are
119875119873(119909) = 119901
0+ 1199011119909 + 11990121199092
+ sdot sdot sdot + 119901119873(119909)
119876119872(119909) = 119902
0+ 1199021119909 + 11990221199092
+ sdot sdot sdot + 119902119872(119909)
(11)
The polynomials in (11) are constructed so that 119891(119909) and119877119873119872
(119909) agree at119909 = 0 and their derivatives up to119873+119872 agreeat 119909 = 0 For the case where 119876
0(119909) = 1 the approximation
is just the Maclaurin expansion for 119891(119909) For a fixed valueof 119873 + 119872 the error is the smallest when 119875
119873(119909) and 119876
119872(119909)
Mathematical Problems in Engineering 3
have the same degree or when119875119873(119909) has a degree higher than
119876119872(119909)Notice that the constant coefficient of119876
119872is 1199020minus1 This is
permissible because it can be noted that 0 and119877119873119872
(119909) are notchangedwhen both119875
119873(119909) and119876
119872(119909) are divided by the same
constant Hence the rational function119877119873119872
(119909) has119873+119872+1
unknown coefficients Assume that 119891(119909) is analytic and hasthe Maclaurin expansion
119891 (119909) = 1198860+ 1198861119909 + 11988621199092
+ sdot sdot sdot + 119886119896119909119896
+ sdot sdot sdot (12)
And from the difference 119891(119909)119876119872(119909) minus 119875
119873(119909) = 119885(119909)
lceil
infin
sum
119894=0
119886119894119909119894
rceillceil
119872
sum
119894=0
119902119894119909119894
rceil minus lceil
119873
sum
119894=0
119901119894119909119894
rceil = lceil
infin
sum
119894=119873+119872+1
119888119894119909119894
rceil (13)
The lower index 119895 = 119873 +119872 + 1 in the summation at theright side of (13) is chosen because the first119873+119872 derivativesof 119891(119883) and 119877
119873119872(119909) should agree at 119909 = 0
When the left side of (13) ismultiplied out and coefficientsof the powers of 119909119894 are set equal to zero for 119896 = 0 1 2 119873+
119872 this results in a system of119873 +119872 + 1 linear equations
1198860minus 1199010= 0
11990211198860+ 1198861minus 1199011= 0
11990221198860+ 11990211198861+ 1198862minus 1199012= 0
11990231198860+ 11990221198861+ 11990211198862+ 1198863minus 1199013= 0
119902119872119886119873minus119872
1003816100381610038161003816119902119872minus1119886119873minus119872minus11003816100381610038161003816 119886119873 minus 119901119873 = 0
(14)
119902119872119886119873minus119872+1
+ 119902119872minus1
119886119873minus119872+2
+ sdot sdot sdot + 1199021119886119873+ 119886119873+2
= 0
119902119872119886119873minus119872+2
+ 119902119872minus1
119886119873minus119872+3
+ sdot sdot sdot + 1199021119886119873+1
+ 119886119873+3
= 0
119902119872119886119873+ 119902119872119886119873+1
+ sdot sdot sdot + 1199021119886119873+119872+1
+ 119886119873+119872
= 0
(15)
Notice that in each equation the sum of the subscripts onthe factors of each product is the same and this sum increasesconsecutively from 0 to 119873 + 119872 The 119872 equations in (15)involve only the unknowns 119902
1 1199022 119902
119872and must be solved
first Then the equations in (14) are successively used to find1199011 1199012 119901
119873[49]
5 Laplace-Padeacute Posttreatment ofPower Series Solutions
The coupling of Laplace transform and Pade approximant[40] is used to deal with the lost information of truncatedpower series [41ndash49] The process can be summarized asfollows
(1) First Laplace transformation is applied to a powerseries solution obtained by HPM or NDHPM meth-ods
(2) Next 1119905 is written in place of 119904
Undeformed position
Deformed position
119875120572
119875120572
119904
119909
120579(0)
119910
Figure 1 A cantilever beam under terminal follower force
(3) Afterwards we convert the transformed series into ameromorphic function by forming its Pade approxi-mant of order [119873119872]119873 and119872 are arbitrarily chosesbut they should be smaller than the power seriesorder In this step the Pade approximant extendsthe domain of the truncated series solution to obtainbetter accuracy and convergence
(4) Then 1119904 is written in place of 119905(5) Finally by using the inverse Laplace 119904 transformation
we obtain the modified approximate solution
The Laplace-Pade posttreatment of HPM and NDHPMmethods will be referred throughout the rest of this paper asLPHPM and LPNDHPM respectively
6 Solution of Cantilever Problem
Beams subjected to follower load arise in many problemsof structural engineering like lumbar spine in biomechanicssmart structures applications and loads applied to struc-tural components by cables in tension among others Thegoverning equations of such structures involve the effectsof nonlinearities due to large deformations and materialproperties [50ndash55]
In this work we study the large-deflection problem ofa cantilever beam under a tip-concentrated follower forceas depicted in Figure 1 The angle 120572 of inclination of theforce with respect to the deformed axis of the beam remainsunchanged during deformation We assume that the centerof the Cartesian system (119909 119910) is located at the fixed endand 120579 is the local angle of inclination of the centroidalaxis beam Therefore the mathematical formulation of thisproblem yields the following nonlinear two-point boundary-value problem
12057910158401015840
+ 120582 sin [120579 + 120572 minus 120579 (0)] = 0 1205791015840
(0) = 0 120579 (1) = 0
(16)
where prime denotes differentiation with respect to 120578 Addi-tionally the related dimensionless quantities are defined as
120578 =119904
119897 120585 =
119909
119897 120577 =
119910
119897 120582 =
1198972
119875
119864119897 (17)
where 119897 represents the length of the originally straight elasticcantilever beam 119864119897 is the flexural rigidity 119904 is the arc length
4 Mathematical Problems in Engineering
measured from the tip and 119875 is the terminal follower forcewith constant angle 120572
In [50] is reported that (16) can be reduced to an initial-value problem by the following transformation
120601 (120578) = 120579 (120578) + 120572 minus 120579 (0) (18)
resulting in the following initial value problem
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (19)
with the extra condition
120601 (1) minus 120572 + 120579 (0) = 0 (20)
where the slope of 120579(120578) can be obtained by using (18) and (20)resulting in the following
120579 (120578) = 120601 (120578) minus 120601 (1) (21)
Finally the deformed curve of beamaxis can be calculatedfrom solution of the slope 120579(120578) as
120585 (120578) = int
1
120578
cos (120579) 119889
120577 (120578) = int
1
120578
sin (120579) 119889(22)
61 Solution Obtained by Using NDHPMMethod In order tocircumvent difficulties due to the nonlinear sin term of (19)we propose to use a seventh-order Taylor series expansionresulting in the following
12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
) = 0
120601 (0) = 120572 1206011015840
(0) = 0
(23)
and by using (7) and (23) we establish the following homo-topy equation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
119901 minus1
5040V7
1199012
)) = 0
(24)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylorrsquos expansion and linearoperator 119871 is
V10158401015840
+ 120582V (25)
and trial function 1206010is
1206010= 120572 cos (120582120578) (26)
Substituting (8) into (24) and reordering and equatingterms with the same 119901 powers we obtain the following linearset of differential equations
1199010
V10158401015840
0
+ 120582V0= 0 V
0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V1minus1
6120582V3
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+ 120582V2+
1
120120582V5
0
minus1
2120582V2
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
1199013
V10158401015840
3
+ 120582V3minus1
2120582V0V2
1
minus1
5040120582V7
0
+1
24120582V4
0
V1minus1
2120582V2
0
V2= 0
V3(0) = 0 V
1015840
3
(0) = 0
(27)
By solving (27) we obtain
V0= 120572 cos (120578)
V1= minus
1
481205723
(minus cos (120578) +cos3 (120578) minus 3 sin (120578) 120578)
V2=
1
153601205725
(23 cos (120578)
minus 60cos2 (120578) sin (120578) 120578
+ 15 sin (120578) 120578 minus 35cos3 (120578)
+12cos5 (120578) minus 30 cos (120578) 2
1205782
)
V3= minus
1
51609601205727
( minus 593 cos (120578)
+ 1148cos3 (120578) minus 609 sin (120578) 120578
minus 735cos5 (120578) + 1365 cos (120578) 2
1205782
+ 180cos7 (120578) minus 1260 sin (120578)
times 120578cos7 (120578) 119909 + 2100cos2 (120578)
times sin (120578) 120578 + 210 sin (120578) 3
1205783
minus18902
cos3 (120578) 1205782) (28)
where = radic120582Substituting solutions (28) into (8) and calculating the
limit when 119901 rarr 1 results in the third-order approximation
120601 (120578) = lim119901rarr1
(
3
sum
119894=0
V119894119901119894
) = V0+ V1+ V2+ V3 (29)
Mathematical Problems in Engineering 5
62 Solution Calculated by Using HPM and LPHPMMethodsBy using (4) and (23) we establish the following homotopyequation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
minus1
5040V7
)) = 0
(30)
where linear operator 119871 is
V10158401015840
(31)
and trial function 1206010is
1206010= 120572 (32)
Substituting (5) into (30) and reordering and equatingterms with the same 119901 powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
minus1
5040120582V7
0
minus1
6120582V3
0
+ 120582V0+
1
120120582V5
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+1
24120582V4
0
V1+ 120582V1minus1
2120582V2
0
V1minus
1
720120582V6
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
(33)
By solving (33) we obtain
V0= 120572
V1= (
1
100801205821205727
+1
121205821205723
minus1
2120582120572 minus
1
2401205821205725
) 1205782
V2= (minus
1
12096001205822
12057211
minus1
18901205822
1205727
+1
1801205822
1205725
+41
14515201205822
1205729
minus1
361205822
1205723
+1
241205822
120572 +1
870912001205822
12057213
) 1205784
(34)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (34) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (35)
Expression (35) is too long to be written here neverthe-less it can be simplified if we consider a particular case Forinstance when 120572 = 1205872 it results in the following
119906 (120578) = minus 50091602 times 10minus5
12057810
1205825
minus 37265881 times 10minus5
1205784
1205822
+ 00041842058401205786
1205823
+ 7200012957 times 10minus17
12057836
12058218
minus 049992155051205782
120582
+ 348692001 times 10minus9
12057816
1205828
minus 436006 times 10minus12
12057826
12058213
minus 14 times 10minus15
12057834
12058217
minus 3618364186 times 10minus7
12057812
1205826
+ 789 times 10minus14
12057830
12058215
minus 2448310334 times 10minus12
12057824
12058212
+ 2455105652 times 10minus10
12057822
12058211
+ 0000000816190899312057814
1205827
minus 1686 times 10minus15
11990932
12058216
minus 1409132166 times 10minus8
12057818
1205829
+ 4567238741 times 10minus11
12057820
12058210
+ 707 times 10minus14
12057828
12058214
+ 1570796327 minus 7024412 times 10minus6
1205788
1205824
(36)By using (36) and (21) we can calculate approximately
the deflection angle 120579(0) nevertheless accuracy can beincreased applying the Laplace-Pade posttreatment FirstLaplace transformation is applied to (36) then 1120578 is writtenin place of 119904 Afterwards Pade approximant [88] is appliedand 1119904 is written in place of 120578 Finally by using theinverse Laplace 119904 transformation we obtain the modifiedapproximate solution For instance for 120582 = 1375 the resultof LPHPM is
119906 (120578) = minus 01295812455566806
times 10minus3 exp (minus5536309139671352120578)
times cos (1454887311024889120578)+ 03532982009243434
times 10minus4 exp (minus5536309139671352120578)
times sin (1454887311024889120578)
minus 02686099209980136
times 10minus1 cos (8783120641372600120578)
+ 1597916481385812
times cos (3150018868129787120578)minus 01295812455566806
times 10minus3 exp (5536309139671352120578)
times cos (1454887311024889120578)
minus 03532982009243434
times 10minus4 exp (5536309139671352120578)
times sin (1454887311024889120578) (37)
6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
have the same degree or when119875119873(119909) has a degree higher than
119876119872(119909)Notice that the constant coefficient of119876
119872is 1199020minus1 This is
permissible because it can be noted that 0 and119877119873119872
(119909) are notchangedwhen both119875
119873(119909) and119876
119872(119909) are divided by the same
constant Hence the rational function119877119873119872
(119909) has119873+119872+1
unknown coefficients Assume that 119891(119909) is analytic and hasthe Maclaurin expansion
119891 (119909) = 1198860+ 1198861119909 + 11988621199092
+ sdot sdot sdot + 119886119896119909119896
+ sdot sdot sdot (12)
And from the difference 119891(119909)119876119872(119909) minus 119875
119873(119909) = 119885(119909)
lceil
infin
sum
119894=0
119886119894119909119894
rceillceil
119872
sum
119894=0
119902119894119909119894
rceil minus lceil
119873
sum
119894=0
119901119894119909119894
rceil = lceil
infin
sum
119894=119873+119872+1
119888119894119909119894
rceil (13)
The lower index 119895 = 119873 +119872 + 1 in the summation at theright side of (13) is chosen because the first119873+119872 derivativesof 119891(119883) and 119877
119873119872(119909) should agree at 119909 = 0
When the left side of (13) ismultiplied out and coefficientsof the powers of 119909119894 are set equal to zero for 119896 = 0 1 2 119873+
119872 this results in a system of119873 +119872 + 1 linear equations
1198860minus 1199010= 0
11990211198860+ 1198861minus 1199011= 0
11990221198860+ 11990211198861+ 1198862minus 1199012= 0
11990231198860+ 11990221198861+ 11990211198862+ 1198863minus 1199013= 0
119902119872119886119873minus119872
1003816100381610038161003816119902119872minus1119886119873minus119872minus11003816100381610038161003816 119886119873 minus 119901119873 = 0
(14)
119902119872119886119873minus119872+1
+ 119902119872minus1
119886119873minus119872+2
+ sdot sdot sdot + 1199021119886119873+ 119886119873+2
= 0
119902119872119886119873minus119872+2
+ 119902119872minus1
119886119873minus119872+3
+ sdot sdot sdot + 1199021119886119873+1
+ 119886119873+3
= 0
119902119872119886119873+ 119902119872119886119873+1
+ sdot sdot sdot + 1199021119886119873+119872+1
+ 119886119873+119872
= 0
(15)
Notice that in each equation the sum of the subscripts onthe factors of each product is the same and this sum increasesconsecutively from 0 to 119873 + 119872 The 119872 equations in (15)involve only the unknowns 119902
1 1199022 119902
119872and must be solved
first Then the equations in (14) are successively used to find1199011 1199012 119901
119873[49]
5 Laplace-Padeacute Posttreatment ofPower Series Solutions
The coupling of Laplace transform and Pade approximant[40] is used to deal with the lost information of truncatedpower series [41ndash49] The process can be summarized asfollows
(1) First Laplace transformation is applied to a powerseries solution obtained by HPM or NDHPM meth-ods
(2) Next 1119905 is written in place of 119904
Undeformed position
Deformed position
119875120572
119875120572
119904
119909
120579(0)
119910
Figure 1 A cantilever beam under terminal follower force
(3) Afterwards we convert the transformed series into ameromorphic function by forming its Pade approxi-mant of order [119873119872]119873 and119872 are arbitrarily chosesbut they should be smaller than the power seriesorder In this step the Pade approximant extendsthe domain of the truncated series solution to obtainbetter accuracy and convergence
(4) Then 1119904 is written in place of 119905(5) Finally by using the inverse Laplace 119904 transformation
we obtain the modified approximate solution
The Laplace-Pade posttreatment of HPM and NDHPMmethods will be referred throughout the rest of this paper asLPHPM and LPNDHPM respectively
6 Solution of Cantilever Problem
Beams subjected to follower load arise in many problemsof structural engineering like lumbar spine in biomechanicssmart structures applications and loads applied to struc-tural components by cables in tension among others Thegoverning equations of such structures involve the effectsof nonlinearities due to large deformations and materialproperties [50ndash55]
In this work we study the large-deflection problem ofa cantilever beam under a tip-concentrated follower forceas depicted in Figure 1 The angle 120572 of inclination of theforce with respect to the deformed axis of the beam remainsunchanged during deformation We assume that the centerof the Cartesian system (119909 119910) is located at the fixed endand 120579 is the local angle of inclination of the centroidalaxis beam Therefore the mathematical formulation of thisproblem yields the following nonlinear two-point boundary-value problem
12057910158401015840
+ 120582 sin [120579 + 120572 minus 120579 (0)] = 0 1205791015840
(0) = 0 120579 (1) = 0
(16)
where prime denotes differentiation with respect to 120578 Addi-tionally the related dimensionless quantities are defined as
120578 =119904
119897 120585 =
119909
119897 120577 =
119910
119897 120582 =
1198972
119875
119864119897 (17)
where 119897 represents the length of the originally straight elasticcantilever beam 119864119897 is the flexural rigidity 119904 is the arc length
4 Mathematical Problems in Engineering
measured from the tip and 119875 is the terminal follower forcewith constant angle 120572
In [50] is reported that (16) can be reduced to an initial-value problem by the following transformation
120601 (120578) = 120579 (120578) + 120572 minus 120579 (0) (18)
resulting in the following initial value problem
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (19)
with the extra condition
120601 (1) minus 120572 + 120579 (0) = 0 (20)
where the slope of 120579(120578) can be obtained by using (18) and (20)resulting in the following
120579 (120578) = 120601 (120578) minus 120601 (1) (21)
Finally the deformed curve of beamaxis can be calculatedfrom solution of the slope 120579(120578) as
120585 (120578) = int
1
120578
cos (120579) 119889
120577 (120578) = int
1
120578
sin (120579) 119889(22)
61 Solution Obtained by Using NDHPMMethod In order tocircumvent difficulties due to the nonlinear sin term of (19)we propose to use a seventh-order Taylor series expansionresulting in the following
12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
) = 0
120601 (0) = 120572 1206011015840
(0) = 0
(23)
and by using (7) and (23) we establish the following homo-topy equation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
119901 minus1
5040V7
1199012
)) = 0
(24)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylorrsquos expansion and linearoperator 119871 is
V10158401015840
+ 120582V (25)
and trial function 1206010is
1206010= 120572 cos (120582120578) (26)
Substituting (8) into (24) and reordering and equatingterms with the same 119901 powers we obtain the following linearset of differential equations
1199010
V10158401015840
0
+ 120582V0= 0 V
0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V1minus1
6120582V3
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+ 120582V2+
1
120120582V5
0
minus1
2120582V2
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
1199013
V10158401015840
3
+ 120582V3minus1
2120582V0V2
1
minus1
5040120582V7
0
+1
24120582V4
0
V1minus1
2120582V2
0
V2= 0
V3(0) = 0 V
1015840
3
(0) = 0
(27)
By solving (27) we obtain
V0= 120572 cos (120578)
V1= minus
1
481205723
(minus cos (120578) +cos3 (120578) minus 3 sin (120578) 120578)
V2=
1
153601205725
(23 cos (120578)
minus 60cos2 (120578) sin (120578) 120578
+ 15 sin (120578) 120578 minus 35cos3 (120578)
+12cos5 (120578) minus 30 cos (120578) 2
1205782
)
V3= minus
1
51609601205727
( minus 593 cos (120578)
+ 1148cos3 (120578) minus 609 sin (120578) 120578
minus 735cos5 (120578) + 1365 cos (120578) 2
1205782
+ 180cos7 (120578) minus 1260 sin (120578)
times 120578cos7 (120578) 119909 + 2100cos2 (120578)
times sin (120578) 120578 + 210 sin (120578) 3
1205783
minus18902
cos3 (120578) 1205782) (28)
where = radic120582Substituting solutions (28) into (8) and calculating the
limit when 119901 rarr 1 results in the third-order approximation
120601 (120578) = lim119901rarr1
(
3
sum
119894=0
V119894119901119894
) = V0+ V1+ V2+ V3 (29)
Mathematical Problems in Engineering 5
62 Solution Calculated by Using HPM and LPHPMMethodsBy using (4) and (23) we establish the following homotopyequation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
minus1
5040V7
)) = 0
(30)
where linear operator 119871 is
V10158401015840
(31)
and trial function 1206010is
1206010= 120572 (32)
Substituting (5) into (30) and reordering and equatingterms with the same 119901 powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
minus1
5040120582V7
0
minus1
6120582V3
0
+ 120582V0+
1
120120582V5
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+1
24120582V4
0
V1+ 120582V1minus1
2120582V2
0
V1minus
1
720120582V6
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
(33)
By solving (33) we obtain
V0= 120572
V1= (
1
100801205821205727
+1
121205821205723
minus1
2120582120572 minus
1
2401205821205725
) 1205782
V2= (minus
1
12096001205822
12057211
minus1
18901205822
1205727
+1
1801205822
1205725
+41
14515201205822
1205729
minus1
361205822
1205723
+1
241205822
120572 +1
870912001205822
12057213
) 1205784
(34)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (34) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (35)
Expression (35) is too long to be written here neverthe-less it can be simplified if we consider a particular case Forinstance when 120572 = 1205872 it results in the following
119906 (120578) = minus 50091602 times 10minus5
12057810
1205825
minus 37265881 times 10minus5
1205784
1205822
+ 00041842058401205786
1205823
+ 7200012957 times 10minus17
12057836
12058218
minus 049992155051205782
120582
+ 348692001 times 10minus9
12057816
1205828
minus 436006 times 10minus12
12057826
12058213
minus 14 times 10minus15
12057834
12058217
minus 3618364186 times 10minus7
12057812
1205826
+ 789 times 10minus14
12057830
12058215
minus 2448310334 times 10minus12
12057824
12058212
+ 2455105652 times 10minus10
12057822
12058211
+ 0000000816190899312057814
1205827
minus 1686 times 10minus15
11990932
12058216
minus 1409132166 times 10minus8
12057818
1205829
+ 4567238741 times 10minus11
12057820
12058210
+ 707 times 10minus14
12057828
12058214
+ 1570796327 minus 7024412 times 10minus6
1205788
1205824
(36)By using (36) and (21) we can calculate approximately
the deflection angle 120579(0) nevertheless accuracy can beincreased applying the Laplace-Pade posttreatment FirstLaplace transformation is applied to (36) then 1120578 is writtenin place of 119904 Afterwards Pade approximant [88] is appliedand 1119904 is written in place of 120578 Finally by using theinverse Laplace 119904 transformation we obtain the modifiedapproximate solution For instance for 120582 = 1375 the resultof LPHPM is
119906 (120578) = minus 01295812455566806
times 10minus3 exp (minus5536309139671352120578)
times cos (1454887311024889120578)+ 03532982009243434
times 10minus4 exp (minus5536309139671352120578)
times sin (1454887311024889120578)
minus 02686099209980136
times 10minus1 cos (8783120641372600120578)
+ 1597916481385812
times cos (3150018868129787120578)minus 01295812455566806
times 10minus3 exp (5536309139671352120578)
times cos (1454887311024889120578)
minus 03532982009243434
times 10minus4 exp (5536309139671352120578)
times sin (1454887311024889120578) (37)
6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
measured from the tip and 119875 is the terminal follower forcewith constant angle 120572
In [50] is reported that (16) can be reduced to an initial-value problem by the following transformation
120601 (120578) = 120579 (120578) + 120572 minus 120579 (0) (18)
resulting in the following initial value problem
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (19)
with the extra condition
120601 (1) minus 120572 + 120579 (0) = 0 (20)
where the slope of 120579(120578) can be obtained by using (18) and (20)resulting in the following
120579 (120578) = 120601 (120578) minus 120601 (1) (21)
Finally the deformed curve of beamaxis can be calculatedfrom solution of the slope 120579(120578) as
120585 (120578) = int
1
120578
cos (120579) 119889
120577 (120578) = int
1
120578
sin (120579) 119889(22)
61 Solution Obtained by Using NDHPMMethod In order tocircumvent difficulties due to the nonlinear sin term of (19)we propose to use a seventh-order Taylor series expansionresulting in the following
12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
) = 0
120601 (0) = 120572 1206011015840
(0) = 0
(23)
and by using (7) and (23) we establish the following homo-topy equation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
119901 minus1
5040V7
1199012
)) = 0
(24)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylorrsquos expansion and linearoperator 119871 is
V10158401015840
+ 120582V (25)
and trial function 1206010is
1206010= 120572 cos (120582120578) (26)
Substituting (8) into (24) and reordering and equatingterms with the same 119901 powers we obtain the following linearset of differential equations
1199010
V10158401015840
0
+ 120582V0= 0 V
0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V1minus1
6120582V3
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+ 120582V2+
1
120120582V5
0
minus1
2120582V2
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
1199013
V10158401015840
3
+ 120582V3minus1
2120582V0V2
1
minus1
5040120582V7
0
+1
24120582V4
0
V1minus1
2120582V2
0
V2= 0
V3(0) = 0 V
1015840
3
(0) = 0
(27)
By solving (27) we obtain
V0= 120572 cos (120578)
V1= minus
1
481205723
(minus cos (120578) +cos3 (120578) minus 3 sin (120578) 120578)
V2=
1
153601205725
(23 cos (120578)
minus 60cos2 (120578) sin (120578) 120578
+ 15 sin (120578) 120578 minus 35cos3 (120578)
+12cos5 (120578) minus 30 cos (120578) 2
1205782
)
V3= minus
1
51609601205727
( minus 593 cos (120578)
+ 1148cos3 (120578) minus 609 sin (120578) 120578
minus 735cos5 (120578) + 1365 cos (120578) 2
1205782
+ 180cos7 (120578) minus 1260 sin (120578)
times 120578cos7 (120578) 119909 + 2100cos2 (120578)
times sin (120578) 120578 + 210 sin (120578) 3
1205783
minus18902
cos3 (120578) 1205782) (28)
where = radic120582Substituting solutions (28) into (8) and calculating the
limit when 119901 rarr 1 results in the third-order approximation
120601 (120578) = lim119901rarr1
(
3
sum
119894=0
V119894119901119894
) = V0+ V1+ V2+ V3 (29)
Mathematical Problems in Engineering 5
62 Solution Calculated by Using HPM and LPHPMMethodsBy using (4) and (23) we establish the following homotopyequation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
minus1
5040V7
)) = 0
(30)
where linear operator 119871 is
V10158401015840
(31)
and trial function 1206010is
1206010= 120572 (32)
Substituting (5) into (30) and reordering and equatingterms with the same 119901 powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
minus1
5040120582V7
0
minus1
6120582V3
0
+ 120582V0+
1
120120582V5
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+1
24120582V4
0
V1+ 120582V1minus1
2120582V2
0
V1minus
1
720120582V6
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
(33)
By solving (33) we obtain
V0= 120572
V1= (
1
100801205821205727
+1
121205821205723
minus1
2120582120572 minus
1
2401205821205725
) 1205782
V2= (minus
1
12096001205822
12057211
minus1
18901205822
1205727
+1
1801205822
1205725
+41
14515201205822
1205729
minus1
361205822
1205723
+1
241205822
120572 +1
870912001205822
12057213
) 1205784
(34)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (34) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (35)
Expression (35) is too long to be written here neverthe-less it can be simplified if we consider a particular case Forinstance when 120572 = 1205872 it results in the following
119906 (120578) = minus 50091602 times 10minus5
12057810
1205825
minus 37265881 times 10minus5
1205784
1205822
+ 00041842058401205786
1205823
+ 7200012957 times 10minus17
12057836
12058218
minus 049992155051205782
120582
+ 348692001 times 10minus9
12057816
1205828
minus 436006 times 10minus12
12057826
12058213
minus 14 times 10minus15
12057834
12058217
minus 3618364186 times 10minus7
12057812
1205826
+ 789 times 10minus14
12057830
12058215
minus 2448310334 times 10minus12
12057824
12058212
+ 2455105652 times 10minus10
12057822
12058211
+ 0000000816190899312057814
1205827
minus 1686 times 10minus15
11990932
12058216
minus 1409132166 times 10minus8
12057818
1205829
+ 4567238741 times 10minus11
12057820
12058210
+ 707 times 10minus14
12057828
12058214
+ 1570796327 minus 7024412 times 10minus6
1205788
1205824
(36)By using (36) and (21) we can calculate approximately
the deflection angle 120579(0) nevertheless accuracy can beincreased applying the Laplace-Pade posttreatment FirstLaplace transformation is applied to (36) then 1120578 is writtenin place of 119904 Afterwards Pade approximant [88] is appliedand 1119904 is written in place of 120578 Finally by using theinverse Laplace 119904 transformation we obtain the modifiedapproximate solution For instance for 120582 = 1375 the resultof LPHPM is
119906 (120578) = minus 01295812455566806
times 10minus3 exp (minus5536309139671352120578)
times cos (1454887311024889120578)+ 03532982009243434
times 10minus4 exp (minus5536309139671352120578)
times sin (1454887311024889120578)
minus 02686099209980136
times 10minus1 cos (8783120641372600120578)
+ 1597916481385812
times cos (3150018868129787120578)minus 01295812455566806
times 10minus3 exp (5536309139671352120578)
times cos (1454887311024889120578)
minus 03532982009243434
times 10minus4 exp (5536309139671352120578)
times sin (1454887311024889120578) (37)
6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
62 Solution Calculated by Using HPM and LPHPMMethodsBy using (4) and (23) we establish the following homotopyequation
(1 minus 119901) (119871 (V) minus 119871 (1206010))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
+1
120V5
minus1
5040V7
)) = 0
(30)
where linear operator 119871 is
V10158401015840
(31)
and trial function 1206010is
1206010= 120572 (32)
Substituting (5) into (30) and reordering and equatingterms with the same 119901 powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
minus1
5040120582V7
0
minus1
6120582V3
0
+ 120582V0+
1
120120582V5
0
= 0
V1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
+1
24120582V4
0
V1+ 120582V1minus1
2120582V2
0
V1minus
1
720120582V6
0
V1= 0
V2(0) = 0 V
1015840
2
(0) = 0
(33)
By solving (33) we obtain
V0= 120572
V1= (
1
100801205821205727
+1
121205821205723
minus1
2120582120572 minus
1
2401205821205725
) 1205782
V2= (minus
1
12096001205822
12057211
minus1
18901205822
1205727
+1
1801205822
1205725
+41
14515201205822
1205729
minus1
361205822
1205723
+1
241205822
120572 +1
870912001205822
12057213
) 1205784
(34)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (34) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (35)
Expression (35) is too long to be written here neverthe-less it can be simplified if we consider a particular case Forinstance when 120572 = 1205872 it results in the following
119906 (120578) = minus 50091602 times 10minus5
12057810
1205825
minus 37265881 times 10minus5
1205784
1205822
+ 00041842058401205786
1205823
+ 7200012957 times 10minus17
12057836
12058218
minus 049992155051205782
120582
+ 348692001 times 10minus9
12057816
1205828
minus 436006 times 10minus12
12057826
12058213
minus 14 times 10minus15
12057834
12058217
minus 3618364186 times 10minus7
12057812
1205826
+ 789 times 10minus14
12057830
12058215
minus 2448310334 times 10minus12
12057824
12058212
+ 2455105652 times 10minus10
12057822
12058211
+ 0000000816190899312057814
1205827
minus 1686 times 10minus15
11990932
12058216
minus 1409132166 times 10minus8
12057818
1205829
+ 4567238741 times 10minus11
12057820
12058210
+ 707 times 10minus14
12057828
12058214
+ 1570796327 minus 7024412 times 10minus6
1205788
1205824
(36)By using (36) and (21) we can calculate approximately
the deflection angle 120579(0) nevertheless accuracy can beincreased applying the Laplace-Pade posttreatment FirstLaplace transformation is applied to (36) then 1120578 is writtenin place of 119904 Afterwards Pade approximant [88] is appliedand 1119904 is written in place of 120578 Finally by using theinverse Laplace 119904 transformation we obtain the modifiedapproximate solution For instance for 120582 = 1375 the resultof LPHPM is
119906 (120578) = minus 01295812455566806
times 10minus3 exp (minus5536309139671352120578)
times cos (1454887311024889120578)+ 03532982009243434
times 10minus4 exp (minus5536309139671352120578)
times sin (1454887311024889120578)
minus 02686099209980136
times 10minus1 cos (8783120641372600120578)
+ 1597916481385812
times cos (3150018868129787120578)minus 01295812455566806
times 10minus3 exp (5536309139671352120578)
times cos (1454887311024889120578)
minus 03532982009243434
times 10minus4 exp (5536309139671352120578)
times sin (1454887311024889120578) (37)
6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
On one side for 120582 = 1375 the exact result is 120579(0) = 180∘[51] On the other side by using (21) we can calculate thedeflection angle using (36) and (37) approximations resultingin 240146
∘ and 1791119∘ respectively Therefore for this
case the Laplace-Pade posttreatment was relevant in orderto deal with the HPM truncated power series resulting anotorious increase of accuracy (see Table 1)
63 Power Series Solution by Using NDHPM and Laplace-Pade Posttreatment By using (7) and (23) we establish thefollowing homotopy equation
(1 minus 119901) (119871 (V) minus 119871 (1199060))
+ 119901 (V10158401015840
+ 120582(V minus1
6V3
119901 +1
120V5
1199012
minus1
5040V7
1199013
)) = 0
(38)
where homotopy parameter 119901 has been arbitrarily embeddedinto the power series of Taylor expansion linear operator 119871and trial function120601
0are taken from (31) and (32) respectively
Substituting (8) into (38) reordering and equating termswith the same 119901 powers we obtain the following set of lineardifferential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582V0= 0 V
1(0) = 0 V
1015840
1
(0) = 0
1199012
V10158401015840
2
minus1
6120582V3
0
+ 120582V1= 0 V
2(0) = 0 V
1015840
2
(0) = 0
(39)
Solving (39) we obtain
V0= 120572
V1= minus
1
21205821205721205782
V2=
1
241205822
1205721205784
+1
121205821205723
1205782
(40)
where the subsequent iterations are calculated using MapleCAS software
Substituting solutions (40) into (8) and calculating thelimit when 119901 rarr 1 we can obtain the 18th-order approxi-mation
120601 (120578) = lim119901rarr1
(
18
sum
119894=0
V119894119901119894
) (41)
Expression (41) is too long to be written here neverthe-less it can be simplified considering a particular case Forinstance a terminal follower normal angle 120572 = 1205872 resulting
120601 (120578) = 4222646520 times 10minus42
12058218
12057836
+ 1140293002
times 10minus24
12058217
12057834
+ 4131839790 times 10minus17
12058216
12057832
+ 1098177235 times 10minus12
12058215
12057830
+ 7059044113
times 10minus10
12058214
12057828
+ 5042078503 times 10minus8
12058213
12057826
+ 8416343250 times 10minus7
12058212
12057824
+ 4617471554
times 10minus6
12058211
12057822
+ 9600210952 times 10minus6
12058210
12057820
+ 777303550 times 10minus6
1205829
12057818
+ 232539526
times 10minus6
1205828
12057816
+ 10311191 times 10minus6
1205827
12057814
minus 3576556 times 10minus7
1205826
12057812
minus 500915992
times 10minus5
1205825
12057810
minus 7024403934 times 10minus6
1205788
1205824
+ 4184205821 times 10minus3
1205786
1205823
minus 3726587
times 10minus5
1205822
1205784
minus 049992155051205821205782
+ 1570796327
(42)
In order to increase accuracy of 120579(0) (42) is transformedby the Pade approximation and Laplace transformation FirstLaplace transformation is applied to (42) and then 1120578
is written in place of 119904 Then Pade approximant [88] isapplied and 1119904 is written in place of 120578 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate solution For example given 120582 = 1375 theresultant LPNDHPM approximation is
119906 (120578) = minus 01295804634 times 10minus3 exp (minus5536309145120578)
times cos (1454887309120578)
+ 03532927940 times 10minus4 exp (minus5536309145120578)
times sin (1454887309120578)
minus 02686099338 times 10minus1 cos (8783120717120578)
+ 1597916481 cos (3150018864120578)
minus 01295804634 times 10minus3 exp (5536309145120578)
times cos (1454887309120578)
minus 03532927940 times 10minus4 exp (5536309145120578)
times sin (1454887309120578)
(43)
Now by using (21) we can calculate 120579(0) for (42) and(43) approximations Results for NDHPM and LPNDHPMare minus539274119890(+9)∘ and 1800345∘ respectively (see Table 1)In fact for120582 = 1375 the exact result is 120579(0) = 180∘ thereforethe Laplace-Pade after-treatment was a key factor to increaseaccuracy of NDHPM truncated power series
Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 1 Terminal slope 120579(0) of cantilever beam under normal follower forces (120572 = 1205872)
120582 120579(0)∘ [51] SM [53] NDHPM (29) HPM (35) LPHPM (37) NDHPM (41) LPNDHPM (43) HPM [50]
07010 20 1950 200016 199981 199981 19998 199981 19998114195 40 3903 399784 399957 399958 399487 399957 39997621755 60 5861 599681 599964 599975 561523 599959 60006629941 80 7825 799905 799947 800057 minus369334 799934 80023339117 100 9800 1000498 999943 1000610 minus210449 999999 100050449872 120 11788 1201375 120001 1202963 minus336448 1200574 120081263339 140 13793 1402400 14057 1411245 minus523001 1403214 140109282421 160 15827 1602464 221529 1635890 minus113840119890 + 07 1612001 1601172137500 180 17997 1787521 240146 1791119 minus539274119890 + 09 1800345 1798075
120601(119905) 120601(119905) = 120572
119871
Figure 2 A nonlinear pendulum
7 Solution of Nonlinear Pendulum
The pendulum [56ndash58] of Figure 2 can be modelled by(19) Nevertheless we need to redefine the variables andparameters of (19) resulting in the following
12060110158401015840
+ 120582 sin (120601) = 0 120601 (0) = 120572 1206011015840
(0) = 0 (44)
considering
120582 =119892
119871 (45)
where prime denotes differentiation with respect to time 119905 119871is the length of the pendulum 119892 is acceleration due to gravityand 120572 is the initial angle of displacement 120601
Taking into account the above considerations and substi-tuting 120578 = 119905 into (29) results that the approximate solution(29) obtained by using NDHPM can be considered also asthe solution 120601(119905) of the nonlinear pendulum problem (44)
71 Solution Obtained by Using HPM and Laplace-PadePosttreatment Although approximate solutions (35) and (41)possess good accuracy for cantilever problem we need toincrease the order of Taylor expansion for the sin term in (23)to obtain a highly accurate solution for pendulum problemcompared to other reported solutions [50ndash55] Therefore we
propose to use a 22th-order Taylor series expansion of sinterm resulting in the following
119875 (120601) = 12060110158401015840
+ 120582(120601 minus1
61206013
+1
1201206015
minus1
50401206017
+1
3628801206019
minus1
3991680012060111
+1
622702080012060113
minus1
130767436800012060115
+1
35568742809600012060117
minus1
12164510040883200012060119
+1
5109094217170944000012060121
) = 0
(46)
where initial conditions are 120601(0) = 120572 and 1206011015840(0) = 0A homotopy formulation that can generate a power series
solution for this problem is(1 minus 119901) (119871 (V) minus 119871 (120601
0)) + 119901 (119875 (V)) = 0 (47)
where linear operator 119871 and trial function 1206010are taken from
(31) and (32) respectivelySubstituting (5) into (47) and reordering and equating
terms with the same 119901-powers we obtain the following setof linear differential equations
1199010
V10158401015840
0
= 0 V0(0) = 120572 V
1015840
0
(0) = 0
1199011
V10158401015840
1
+ 120582(V0minus1
6V0
3
+1
120V0
5
minus1
5040V0
7
+1
362880V0
9
minus1
39916800V0
11
+1
6227020800V0
13
minus1
1307674368000V0
15
+1
355687428096000V0
17
minus1
121645100408832000V0
19
+1
51090942171709440000V0
21
) = 0
V1(0) = 0 V
1015840
1
(0) = 0
(48)
8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
by solving (48) we obtain
V0= 120572
V1= (minus
1
2120572 +
1
121205723
minus1
2401205725
+1
100801205727
minus1
7257601205729
+1
7983360012057211
minus1
1245404160012057213
+1
261534873600012057215
minus1
71137485619200012057217
+1
24329020081766400012057219
minus1
10218188434341888000012057221
) 1205821199052
(49)
where the subsequent iterations are calculated by usingMapleCAS software
Substituting solutions (49) into (5) and calculating thelimit when 119901 rarr 1 we can obtain the 12th-order approxi-mation
120601 (119905) = lim119901rarr1
(
12
sum
119894=0
V119894119901119894
) (50)
Expression (50) is too large to be written here never-theless it can be simplified considering particular cases Forexample if we consider 120572 = 1∘ and 120582 = 1 we get the followingresults120601 (119905) = 00174532925200 minus 000872620321865119905
2
+ 00007270728479691199054
minus 242099213449 times 10minus5
1199056
+ 428299598028 times 10minus7
1199058
minus 435845271451
times 10minus9
11990510
+ 575330823834 times 10minus12
11990512
+ 131315973780 times 10minus12
11990514
minus 555443572871
times 10minus14
11990516
+ 162530684769 times 10minus15
11990518
minus 365740303058 times 10minus17
11990520
+ 606029996445
times 10minus19
11990522
minus 508850528365 times 10minus21
11990524
(51)
Now (51) is transformed by the Laplace-Pade posttreat-ment First Laplace transformation is applied to (51) and then1119905 is written in place of 119904 Then Pade approximant [44]is applied and 1119904 is written in place of 119905 Finally by usingthe inverse Laplace 119904 transformation we obtain the modifiedapproximate LPHPM solution
120601 (119905) = minus 276933314632 times 10minus8 cos (299987437966119905)
+ 00174533202134 cos (0999980961654119905) (52)
120582
120579(0)
200180160140120100
80604020
00 5 10 15 20 25 30 35 40
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 3 Terminal slope versus follower force for various angles ofinclination 120572
Equation (52) is more compact and computationallyefficient than power series solution (51) Thus (52) can beused when accurate and handy expressions are needed Thisprocess can be repeated for different values of 120572 and 120582
We can express pendulum period in terms of
119879 = 4radic1
120582119870 (120598) 120598 = sin(120572
2) (53)
where 119870 is the complete elliptic function of the first kindformulated as
119870 (120598) = int
1205872
0
1
radic1 minus 1205982sin2120579
119889120579 0 le 120598 lt 1 (54)
For comparison purposes we will normalize the value of119879 to
=
radic120582
4119879 = 119870 (120598) (55)
Finally is calculated for some values of120572 in Tables 3 and4
8 Numerical Simulation and Discussion
81 Cantilever Problem Structures subjected to followerforces have been reported by several researchers [50 55] Inthis work we propose the solution for large deflections of acantilever beam subjected to a follower force reported in [55]Therefore by using approximate solution (29) and (21) weshow in Figure 3 the relationship between terminal slope 120579(0)and load parameter 120582 for some values of deflection angle inthe range 120572 isin (0
∘
180∘
) Flutter instability occurs and themaximum value of terminal slope is approximately 120579(0) = 2120572as reported in [50 55]
On one side considering a fixed value for 120572 = 1205874we show in Figure 4 the deformed curves of a beam underdifferent values of load parameter120582 First the cantilever beamis a straight line and it is deformed gradually as the amplitudeof the end-concentrated follower force increases until thecurvature of the beam is notorious for 120582 = 24 Additionally
Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Table 2 Terminal slope 120579(0) and coordinates [120585(0) 120577(0)] of cantilever beam under normal follower forces (120572 = 1205872)
Method DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50] DM [55] NDHPM (29) HPM [50]120582 120579(0)
∘
120579(0)∘
120579(0)∘
120585(0) 120585(0) 120585(0) 120577(0) 120577(0) 120577(0)
200 5548 5544 5548 07674 07677 07673 05738 05735 05739400 10178 10184 10184 03428 03419 03420 07862 07866 07864800 15794 15820 15806 minus00739 minus00765 minus00749 06336 06323 063301375 18000 17875 17981 00000 00104 00019 04570 04577 045661600 17756 17627 17722 00910 01009 00938 04212 04215 042062400 14004 14194 14116 04348 04310 04320 01588 01732 016643600 5564 5420 5451 02855 02726 02740 minus04546 minus04619 minus04608
Table 3 Numerical comparison for of nonlinear pendulum Considering 120582 = 1
120572∘
(55) HPM (50) LPHPM NDHPM (29)100000000 15708262330620782 15708262330620789 15708262328912635 157082623306207821000000000 15737921309247680 15737921309137186 15737904171285648 157379213092989855000000000 16489952184785310 16489951818036827 16478388934763048 1648996681455109510000000000 19355810960047220 19356331885927838 19133053425965654 1934577165844194812000000000 21565156474996432 21562170331637955 21071446302159819 2143569524704931013000000000 23087867981671961 23080949709723178 22390737258149828 2270801529839180914000000000 25045500790016340 25047278166695662 24091002654586270 2405279465830681315000000000 27680631453687676 27723737183655317 26410091037967786 2535446797977591116000000000 31533852518878388 31570008973230000 29887412725547848 mdash17000000000 38317419997841462 38074862454595039 36247866486947020 mdash17500000000 45202232749476581 45078737329373597 42924790748606028 mdash17700000000 50298609371127860 50733536048198848 479490944850198683 mdash17900000000 6127778824526868 4631673755961933 588740406465829867 mdash17990000000 8430255141254121 mdash 818871358260360318 mdash17999999000 1764055690983073 mdash 173989702100090882 mdash17999999999 24548351581120853 mdash 242491870075566718 mdash
when the load parameter is larger than the flutter load thebeam deforms towards the opposite direction as reported in[50] On the other side we consider a fixed value for loadparameter 120582 = 16 and different values of 120572 as shown inFigure 5 resulting that the deflection and terminal slope 120579(0)are influenced by the angle 120572 of follower force producing anotorious bending as 120572 increases reaching the extreme caseat 120572 = 1205872
Considering a normal angle 120572 = 1205872 we show in Table 1the terminal slope 120579(0) (using (21)) versus different values ofload parameter 120582 In such table we compare the proposedsolutions (29) (35) (41) LPHPMLPNDHPM approxima-tions (see (37) and (43)) to exact solution [51] a shootingmethod solution [53] and HPM solution reported in [50]Our proposed approximate solutions are in good agreementwith the other reported approximations In particular (29)and LPNDHPM approximations (see (43)) exhibited thebest accuracy of all proposed solutions of this work with asimilar accuracy compared to the results reported in [50]Furthermore we showed in Table 2 the terminal slope 120579(0)and coordinates [120585(0) 120577(0)] (see (22)) of cantilever beamunder normal follower forces (120572 = 1205872) resulting thatour proposed solution (29) exhibited an accuracy in goodagreement with the values obtained by a direct method
(DM) [55] and the results reported in [50] For this work thecantilever beam is considered elastic and ideal then Figures4 and 5 present an ideally deformed beam Further workshould be performed in order to include nonideal effects dueto material characteristics of cantilever
From above we can conclude that the deflection andterminal slope are governed by the deflection angle andmagnitude of the follower forceThis means that the bendingof the beam becomes more notorious as the deflection angleor the magnitude of the follower force increases [50]
82 Pendulum Problem On one hand in [56 58] the authorsachieve approximate solutions for pendulum period withrelative error lt2 for 120572 le 130
∘ and lt1 for 120572 le 150∘
respectively On the other hand in Table 3 and Table 4 weshow a comparison between 1198794 calculated using (29) and(50) and approximations calculated by LPHPM procedureexplained in Section 71 (considering 120582 = 1) The value is obtained applying Newton-Raphson method to equation120601(119905) = 0 that is calculating the first crossing of 120601(119905) by zerosince the initial angle 120601(0) In Table 4 we show the relativeerror (RE) for the range of 120572 isin (0
∘
180∘
) resulting thatour proposed solutions are in good agreement with exact
10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Table 4 Relative error (RE) comparison for of nonlinear pendulum (see Table 3)
120572∘
(55) RE HPM (50) RE LPHPM RE NDHPM (29)100000000 15708262330620782 minus4355119890 minus 16 1087119890 minus 10 minus3247119890 minus 20
1000000000 15737921309247680 7021119890 minus 12 1089119890 minus 06 minus3260119890 minus 12
5000000000 16489952184785310 2224119890 minus 08 00007012 minus8872119890 minus 07
10000000000 19355810960047220 minus2691119890 minus 05 001151 0000518712000000000 21565156474996432 00001385 002289 000600313000000000 23087867981671961 00002996 003019 00164514000000000 25045500790016340 minus7097119890 minus 05 003811 00396415000000000 27680631453687676 minus0001557 00459 00840416000000000 31533852518878388 minus0001147 005221 mdash17000000000 38317419997841462 000633 005401 mdash17500000000 45202232749476581 0002732 005038 mdash17700000000 50298609371127860 minus086468119890 minus 2 04671132119890 minus 1 mdash17900000000 6127778824526868 0244151 03922706119890 minus 1 mdash17990000000 8430255141254121 mdash 028651749119890 minus 1 mdash17999999000 1764055690983073 mdash 01369703119890 minus 1 mdash17999999999 24548351581120853 mdash 001222747 mdash
minus04
minus02
0
02
04
06
0801 02 03 04 05 06 07 08 09 1
120582 = 4
120582 = 8
120582 = 12
120582 = 16120582 = 20
120582 = 24
120585
120577
Figure 4 Deflection curves of a cantilever beam axis under severalfollower forces considering 120572 = 1205874
results Furthermore LPHPM solution can predict the for120572 = 17999999999
∘ exhibiting a RE of 001222747 which ishighly accurate compared to the results obtained in [56 58]
The coupling of Laplace-Pade and HPM method was akey factor to increase the accuracy range until 120601(0) valueis really close to 180∘ Laplace-Pade posttreatment was ableto deal with the truncate power series in order to obtainbetter accuracy for angles close to 120572 = 180
∘ althoughthe behaviour was different for small values of 120572 Howeverin general terms the Laplace-Pade posttreatment generateshandy and computationally more efficient expressions (see(51) versus (52)) Furthermore we can appreciate from Tables3 and 4 that HPM and NDHPM methods do not presentuseful values for 120572 gt 150
∘ and 120572 gt 179∘ due to numerical
noise of the proposed approximations Fortunately LPHPMapproximations achieve a good accuracy within the range1∘
le 120572 le 17999999999∘ From the above discussion
010 02 03 04 05 06 07 08 09 1120585
minus01
01
0
02
03
04
05
120577
120572 =1
2120587 120572 =
1
4120587 120572 =
1
6120587 120572 =
1
3120587
Figure 5 Deflection curves beam axis under follower force 120582 = 16
for various angles of inclination 120572
we can conclude that as the initial angle of displacement120572 approximates to the vicinity 180∘ the pendulum periodincreases notoriously
Finally further research should be done in order to obtainapproximate solutions of the pendulum problem involvingadditional nonlinear effects like friction and mass amongothers
9 Conclusions
In this paper we presented the solution for two nonlinearproblems related by the same differential equation The firstone was the large deflection of a cantilever beam under aterminal follower force The second one was the nonlin-ear pendulum problem We proposed a series of solutionsobtained byNDHPMHPM and combinationswith Laplace-Pade posttreatment For both problems results exhibitedhigh accuracy which are in good agreement with the resultsreported by other works In particular for the pendulum
Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
case we succeeded to predict accurately the period for aninitial angle up to 17999999999
∘ By means of two casestudies we confirmed that NDHPM HPM LPNDHPM andLPHPMare powerful and usefulmethods all of them capableof generating highly accurate approximations for nonlinearproblems
Acknowledgments
Theauthors gratefully acknowledge the financial support pro-vided by the National Council for Science and Technology ofMexico (CONACyT) through Grant CB-2010-01 no 157024The authors would like to express their gratitude to Rogelio-AlejandroCallejas-Molina andRobertoRuiz-Gomez for theircontribution to this paper
References
[1] J-H He ldquoAsymptotic methods for solitary solutions and com-pactonsrdquo Abstract and Applied Analysis vol 2012 Article ID916793 130 pages 2012
[2] J-H He ldquoComparison of homotopy perturbation methodand homotopy analysis methodrdquo Applied Mathematics andComputation vol 156 no 2 pp 527ndash539 2004
[3] J-H He ldquoAn elementary introduction to the homotopy pertur-bation methodrdquo Computers amp Mathematics with Applicationsvol 57 no 3 pp 410ndash412 2009
[4] J-H He ldquoHomotopy perturbation techniquerdquo Computer Meth-ods in Applied Mechanics and Engineering vol 178 no 3-4 pp257ndash262 1999
[5] J-H He ldquoThe homotopy perturbation method nonlinear oscil-lators with discontinuitiesrdquoAppliedMathematics and Computa-tion vol 151 no 1 pp 287ndash292 2004
[6] J-H He ldquoHomotopy perturbation method a new nonlinearanalytical techniquerdquo Applied Mathematics and Computationvol 135 no 1 pp 73ndash79 2003
[7] J-H He ldquoA coupling method of a homotopy technique and aperturbation technique for non-linear problemsrdquo InternationalJournal of Non-Linear Mechanics vol 35 no 1 pp 37ndash43 2000
[8] J H He ldquoApplication of homotopy perturbation method tononlinear wave equationsrdquo Chaos Solitons and Fractals vol 26no 3 pp 695ndash700 2005
[9] J-H He ldquoHomotopy perturbation method for solving bound-ary value problemsrdquo Physics Letters A vol 350 no 1-2 pp 87ndash88 2006
[10] DDGanji ldquoA semi-Analytical technique for non-linear settlingparticle equation of Motionrdquo Journal of Hydro-EnvironmentResearch vol 6 no 4 pp 323ndash327 2012
[11] M Sheikholeslami and D D Ganji ldquoHeat transfer of Cu-waternanofluid flow between parallel platesrdquo Powder Technology vol235 pp 873ndash879 2013
[12] S S Ganji D D Ganji M G Sfahani and S KarimpourldquoApplication of AFF and HPM to the systems of stronglynonlinear oscillationrdquo Current Applied Physics vol 10 no 5 pp1317ndash1325 2010
[13] D D Ganji H B Rokni M G Sfahani and S S GanjildquoApproximate traveling wave solutions for coupled Whitham-Broer-Kaup shallow waterrdquo Advances in Engineering Softwarevol 41 no 7-8 pp 956ndash961 2010
[14] A Barari M Omidvar A R Ghotbi and D D Ganji ldquoApplica-tion of homotopy perturbationmethod and variational iterationmethod to nonlinear oscillator differential equationsrdquo ActaApplicandae Mathematicae vol 104 no 2 pp 161ndash171 2008
[15] H Kocak and A Yildirim ldquoNumerical solution of 3D Greenrsquosfunction for the dynamic system of anisotropic elasticityrdquoPhysics Letters A vol 373 no 35 pp 3145ndash3150 2009
[16] Y Khan H Vazquez-Leal and Q Wu ldquoAn efficient iteratedmethod for mathematical biology modelrdquo Neural Computingand Applications pp 1ndash6 2012
[17] Y Khan Q Wu N Faraz A Yildirim and M Madani ldquoAnew fractional analytical approach via a modified Riemann-Liouville derivativerdquo Applied Mathematics Letters vol 25 no10 pp 1340ndash1346 2012
[18] N Faraz and Y Khan ldquoAnalytical solution of electricallyconducted rotating flow of a second grade fluid over a shrinkingsurfacerdquo Ain Shams Engineering Journal vol 2 no 34 pp 221ndash226 2011
[19] Y Khan Q Wu N Faraz and A Yildirim ldquoThe effects ofvariable viscosity and thermal conductivity on a thin film flowover a shrinkingstretching sheetrdquo Computers amp Mathematicswith Applications vol 61 no 11 pp 3391ndash3399 2011
[20] J Biazar and H Aminikhah ldquoStudy of convergence of homo-topy perturbation method for systems of partial differentialequationsrdquoComputersampMathematics with Applications vol 58no 11-12 pp 2221ndash2230 2009
[21] J Biazar and H Ghazvini ldquoConvergence of the homotopy per-turbation method for partial differential equationsrdquo NonlinearAnalysis vol 10 no 5 pp 2633ndash2640 2009
[22] J Biazar F Badpeima and F Azimi ldquoApplication of the homo-topy perturbation method to Zakharov-Kuznetsov equationsrdquoComputers amp Mathematics with Applications vol 58 no 11-12pp 2391ndash2394 2009
[23] J Biazar and H Ghazvini ldquoHomotopy perturbationmethod forsolving hyperbolic partial differential equationsrdquo Computers ampMathematics with Applications vol 56 no 2 pp 453ndash458 2008
[24] J Biazar and H Ghazvini ldquoExact solutions for non-linearSchrodinger equations by Hersquos homotopy perturbationmethodrdquo Physics Letters A vol 366 no 1-2 pp 79ndash84 2007
[25] M Fathizadeh M Madani Y Khan N Faraz A Yildirimand S Tutkun ldquoAn effective modification of the homotopyperturbation method for mhd viscous flow over a stretchingsheetrdquo Journal of King Saud UniversitymdashScience 2011
[26] M Madani M Fathizadeh Y Khan and A Yildirim ldquoOn thecoupling of the homotopy perturbation method and LaplacetransformationrdquoMathematical andComputerModelling vol 53no 9-10 pp 1937ndash1945 2011
[27] H Vazquez-Leal U Filobello-Nino R Castaneda-Sheissa ASarmiento-Reyes and J Sanchez Orea ldquoHigh accurate simpleapproximation of normal distribution integralrdquo MathematicalProblems in Engineering vol 2012 Article ID 124029 22 pages2012
[28] H Vazquez-Leal U Filobello-Nino R Castaneda-SheissaL Hernandez-Martınez and A Sarmiento-Reyes ldquoModifiedHPMs inspired by homotopy continuation methodsrdquo Mathe-matical Problems in Engineering vol 2012 Article ID 30912319 pages 2012
[29] U Filobello-Nino H Vazquez-Leal R Castaneda-Sheissa etal ldquoAn approximate solution of blasius equation by using hpmmethodrdquo Asian Journal of Mathematics and Statistics vol 5 no2 pp 50ndash59 2012
12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
[30] D Agırseven and T Ozis ldquoAn analytical study for Fisher typeequations by using homotopy perturbationmethodrdquoComputersamp Mathematics with Applications vol 60 no 3 pp 602ndash6092010
[31] T Ozis andD Agırseven ldquoHersquos homotopy perturbationmethodfor solving heat-like and wave-like equations with variablecoefficientsrdquo Physics Letters A vol 372 no 38 pp 5944ndash59502008
[32] T Ozis and A Yildirim ldquoA note onHersquos homotopy perturbationmethod for van der Pol oscillator with very strong nonlinearityrdquoChaos Solitons and Fractals vol 34 no 3 pp 989ndash991 2007
[33] D D Ganji and A Rajabi ldquoAssessment of homotopy-perturbation and perturbation methods in heat radiationequationsrdquo International Communications in Heat and MassTransfer vol 33 no 3 pp 391ndash400 2006
[34] M Rafei D D Ganji and H Daniali ldquoSolution of the epidemicmodel by homotopy perturbation methodrdquo Applied Mathemat-ics and Computation vol 187 no 2 pp 1056ndash1062 2007
[35] D D Ganji ldquoThe application of Hersquos homotopy perturbationmethod to nonlinear equations arising in heat transferrdquo PhysicsLetters A vol 355 no 4-5 pp 337ndash341 2006
[36] D D Ganji and A Sadighi ldquoApplication of homotopy-perturbation and variational iteration methods to nonlinearheat transfer and porousmedia equationsrdquo Journal of Computa-tional and Applied Mathematics vol 207 no 1 pp 24ndash34 2007
[37] M Sheikholeslami H R Ashorynejad D D Ganji andA Yildirim ldquoHomotopy perturbation method for three-dimensional problem of condensation film on inclined rotatingdiskrdquo Scientia Iranica vol 19 no 3 pp 437ndash442 2012
[38] D D Ganji H Tari and M B Jooybari ldquoVariational iterationmethod and homotopy perturbationmethod for nonlinear evo-lution equationsrdquo Computers amp Mathematics with Applicationsvol 54 no 7-8 pp 1018ndash1027 2007
[39] J-H He ldquoHomotopy perturbation method with an auxiliarytermrdquo Abstract and Applied Analysis vol 2012 Article ID857612 7 pages 2012
[40] Y Yamamoto CDang YHao andYC Jiao ldquoAn aftertreatmenttechnique for improving the accuracy of Adomianrsquos decomposi-tion methodrdquo Computers ampMathematics with Applications vol43 no 6-7 pp 783ndash798 2002
[41] N H Sweilam and M M Khader ldquoExact solutions of somecoupled nonlinear partial differential equations using thehomotopy perturbation methodrdquo Computers amp Mathematicswith Applications vol 58 no 11-12 pp 2134ndash2141 2009
[42] S Momani G H Erjaee and M H Alnasr ldquoThe modifiedhomotopy perturbation method for solving strongly nonlinearoscillatorsrdquo Computers amp Mathematics with Applications vol58 no 11-12 pp 2209ndash2220 2009
[43] Y Khan and N Faraz ldquoApplication of modified Laplace decom-position method for solving boundary layer equationrdquo Journalof King Saud UniversitymdashScience vol 23 no 1 pp 115ndash119 2011
[44] D Bahuguna A Ujlayan and D N Pandey ldquoA comparativestudy of numerical methods for solving an integro-differentialequationrdquo Computers amp Mathematics with Applications vol 57no 9 pp 1485ndash1493 2009
[45] S Momani and V S Erturk ldquoSolutions of non-linear oscillatorsby the modified differential transform methodrdquo Computers ampMathematics with Applications vol 55 no 4 pp 833ndash842 2008
[46] A Gokdogan M Merdan and A Yildirim ldquoThe modifiedalgorithm for the differential transform method to solution ofGenesio systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 17 no 1 pp 45ndash51 2012
[47] P-Y Tsai and C-K Chen ldquoAn approximate analytic solutionof the nonlinear Riccati differential equationrdquo Journal of theFranklin Institute vol 347 no 10 pp 1850ndash1862 2010
[48] A E Ebaid ldquoA reliable aftertreatment for improving the differ-ential transformation method and its application to nonlinearoscillators with fractional nonlinearitiesrdquo Communications inNonlinear Science and Numerical Simulation vol 16 no 1 pp528ndash536 2011
[49] M Merdan A Gokdogan and A Yildirim ldquoOn the numericalsolution of the model for HIV infection of 1198621198634+T cellsrdquoComputers amp Mathematics with Applications vol 62 no 1 pp118ndash123 2011
[50] Y-G Wang W-H Lin and N Liu ldquoA homotopy perturbation-based method for large deflection of a cantilever beam undera terminal follower forcerdquo International Journal for Computa-tionalMethods in Engineering Science andMechanics vol 13 no3 pp 197ndash201 2012
[51] B N Rao and G V Rao ldquoOn the large deflections of cantileverbeams with end rotational loadrdquo Zeitschrift Fur AngewandteMathematik Und Mechanik vol 6 pp 507ndash508 1986
[52] B N Rao and G V Rao ldquoLarge deflections of a nonuniformcantilever beam with end rotational loadrdquo Forschung im Inge-nieurwesen vol 54 no 1 pp 24ndash26 1988
[53] B N Rao and G V Rao ldquoLarge deflections of a cantileverbeam subjected to a rotational distributed loadingrdquo Forschungim Ingenieurwesen vol 55 no 4 pp 116ndash120 1989
[54] J H Argyris and S Symeonidis ldquoNonlinear finite element anal-ysis of elastic systems under nonconservative loading naturalformulation I Quasistatic problemsrdquo Computer Methods inApplied Mechanics and Engineering vol 26 no 1 pp 75ndash1231981
[55] B S Shvartsman ldquoLarge deflections of a cantilever beamsubjected to a follower forcerdquo Journal of Sound and Vibrationvol 304 no 3ndash5 pp 969ndash973 2007
[56] A Belendez A Hernandez T Belendez C Neipp and AMarquez ldquoApplication of the homotopy perturbation methodto the nonlinear pendulumrdquo European Journal of Physics vol28 no 1 article 010 pp 93ndash104 2007
[57] A Belendez E ArribasMOrtuno S Gallego AMarquez andI Pascual ldquoApproximate solutions for the nonlinear pendulumequation using a rational harmonic representationrdquo Computersamp Mathematics with Applications vol 64 no 6 pp 1602ndash16112012
[58] A Belendez C Pascual M L Lvarez D I MendezM S Yebraand A Hernndez ldquoHigher order analytical approximate solu-tions to the nonlinear pendulum by Hersquos homotopy methodrdquoPhysica Scripta vol 79 no 1 Article ID 015009 2009
[59] P Brzeski P Perlikowski S Yanchuk and T Kapitaniak ldquoThedynamics of the pendulum suspended on the forced Duffingoscillatorrdquo Journal of Sound and Vibration vol 331 no 24 pp5347ndash5357 2012
[60] G A Baker Essentials of Pade Approximants AcademicExpress London UK 1975
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of