Embed Size (px)
Citation preview

Research ArticleAdaptive Backstepping Controller Design for Leveling Control ofan Underwater Platform Based on Joint Space
Zhi-Lin Zeng Guo-Hua Xu Yin Zhao and Fei Xie
School of Naval Architecture and Ocean Engineering Huazhong University of Science and Technology Wuhan 430074 China
Correspondence should be addressed to Guo-Hua Xu hustxuvipsinacom
Received 17 September 2013 Revised 4 February 2014 Accepted 5 February 2014 Published 24 March 2014
Academic Editor Zoltan Szabo
Copyright copy 2014 Zhi-Lin Zeng et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper focuses on high precision leveling control of an underwater heavy load platform which is viewed as an underwaterparallel robot on the basis of its work pattern The kinematic of platform with deformation is analyzed and the dynamics modelof joint space is established An adaptive backstepping controller according to Lyapunovrsquos function is proposed for leveling controlof platform based on joint space Furthermore the ldquolowest point fixed angle errorrdquo leveling scheme called ldquochaserdquo is chosen forleveling control of platform The digital simulation and practical experiment of single joint space actuator are carried out and theresults show high precision servo control of joint space On the basis of this the platform leveling control simulation relies onthe hardware-in-loop system The results indicate that the proposed controller can effectively restrain the influence from systemparameter uncertainties and external disturbance to realize high precision leveling control of the underwater platform
1 Introduction
An underwater parallel heavy-load platform based ontension-leg platform is proposed here and it will be usedto carry some special underwater tools for underwaterexperiments at designated depth From the viewpoint oftopology the platform can be seen as an underwater flexibleparallel robot with advantages of both parallel mechanismand flexible-driven mode From the viewpoint of control theplatform is amulti-input andmultioutput (MIMO) nonlinearsystem with complex coupling dynamic Hence it has certaindifficulty to realize the high precision leveling control ofplatform
At present the studies on underwater parallel robotcontrol are relatively lacking so it can be just referred to rigidplatform leveling control and flexible parallel robot controltechnology The leveling control technology is widely usedin engineering machinery aerospace military engineeringand other aspects and its precision will directly affect theaccuracy of overall system Zhai andNi proposed two levelingmethods respectively based on position error and angleerror aiming at the leveling issue of six supports hydraulicplatform on stationary base [1] Sheng and Qiu designed
six-support hydraulic Stewart platform bearing heavy loadproposed computer parameterization leveling algorithm andconstructed electrohydraulic servo automatic leveling system[2 3] Ye focused on leveling control of the six-supportplatform bearing heavy load and then put forward a levelingscheme called ldquofixed pointrdquo scheme [4] Zhang chose aldquohighest point fixedrdquo leveling scheme called ldquochaserdquo for a four-support platform and constructed the platform leveling sys-tem with programmable logic controller (PLC) [5] Besidesmany scholars have done a lot of research on the flexibleparallel robot Landsberger from Massachusetts Institute ofTechnology (MIT) first proposed a cable-controlled threedegrees-of-freedom (DOF) parallel linkmanipulator and car-ried out dynamic analysis and control technology of system[6] Fang et al designed the nonlinear feed-forward controllaw for motion control of a six DOF tendon-based parallelmanipulator [7] Yamamoto et al studied the dynamics andcontrol of a parallel mechanism where an end-effector wassuspended by multiple wires [8] Pham et al studied theworkspace of a cable-driven parallel mechanism [9] Zi gaveout the mechanics analysis and control of the feed trackingsystem for the five-hundred meter aperture spherical radiotelescope (FAST) established the dynamics models of the
Hindawi Publishing CorporationJournal of Control Science and EngineeringVolume 2014 Article ID 989717 13 pageshttpdxdoiorg1011552014989717
2 Journal of Control Science and Engineering
A1
A2A3
A4
D1
D2
D3
D4
P1
P2P3
P4
Figure 1 Platform structure
end-effector and the drive system respectively and thencarried out the scaled model experiment of system [10]
The existing parallel robot control applying in engineer-ing design can be divided into two categories one is jointspace based control and another is task space based controlboth have their certain advantages and disadvantages Jointspace based control mainly relies on kinematic relation ofthe parallel platform mechanism as well as dynamics modelof the driving devices task space based control howeverrequires dynamicsrsquo analysis of the platform to build thedynamics model of the platform [11] Considering the com-plexity of the underwater platform system and unknown fac-tors of underwater environment accurate dynamics modelof the underwater platform is hard to obtain therefore jointspace based control is applied in order to accomplish under-water platform controller design in this paper Given that thedriving device of the platform is hydraulic winch by usingthe accurate position servo control toward hydraulic winchdepth setting and orientation adjustment of the underwaterplatform can be realized As to practical applications thestrong nonlinearity as well as the uncertainty of both internalparameters and external load force of hydraulic servo systemhas contributed great difficulties to the leveling control sys-tem design Therefore many scholars have proposed variouscontrol algorithms in order to make profound study and thusto achieve the precise control of the platform
Adaptive backstepping design based on Lyapunovrsquos func-tion is an effective and systematic method for nonlinearsystem controller design The original backstepping controlmethods are designed for nonlinear systems with strictparameter feedbacks Guan et al provided a standardmethodof backstepping design to develop the controller [12ndash14] Inthe process however since the controller contains the param-eters adaptive law while adaptive law also contains controlvariables the system performance consequently degrades insuch loop nest Ruan et al made the assumption that the
initial coefficient value remained to be 1 or invariable beforeany system control input such a system was seldom used inpractical control system instead a variety of nonlinear sys-tems with nonstrict parameter feedbacks are usually appliedin practical application also the coefficients before systemcontrol input remained to be uncertain at most of the cases[15 16]
In this paper according to positioning mode of theplatform based on the kinematic and dynamic analysis ofsystem the joint space based control model is establishedThen an improved adaptive backstepping control method isproposed based on Lyapunovrsquos function for the single drivenjoint to overcome the influence from uncertain parameters ofsystem Besides we verify the performance of the proposedcontroller through digital simulations and individual exper-iments with single driven joint (an actual hydraulic winch)Finally based on the proposed leveling scheme the levelingcontrol simulations of platform rely on the hardware-in-loopsimulation system
2 System Description
The underwater platform mainly consists of platform ontol-ogy hydraulic winches wire ropes and gravity anchors asshown in Figure 1
Four tension winches are installed at points 1198601 1198602 1198603
and 1198604and four mooring winches are installed at points
1198751 1198752 1198753 and 119875
4 respectively Platform ontology always
has positive buoyancy with ballast tank All winches areconnected to four gravity anchors through cables which areserved as tension leg to keep the platform steady under waterFour depth transducers are installed at four corners of theplatform deck respectively and an orientation transducer isinstalled at the center of the platform deck It acquires depthand orientation information of the underwater platformwithhigh precision transducers then it controls the platformbased on the theory of parallel robotThe platform can realizehigh precision positioning at designated depth and meet theorientation requirement of carrying mechanism in certainworkspace
Both platform ontology and wire rope have a certainamount of deformation with external load The deformationof platform cannot be ignored because of the large size andit will be compensated during kinematics analysis The wirerope is always tensioning with work load in the process ofleveling control As a result of this the deformation of wirerope is constant so its variation is ignored in this paper
Hardware-in-loop simulation is a kind of technologywhich joins actual controller and model of the control objecton the computer together for experiment Complex systemslike the platform require a certain building period but itscontrol system needs to be designed a priori As a result ofthis it can only rely on the simulation without actual controlobject During the design process of the platformrsquos controlsystem we utilize the hardware-in-loop simulation system(see Figure 2) to simulate the actuator (hydraulic winch) andthe object (underwater platform) It will effectively shortenthe building period and avoid the waste of resources to acertain extent
Journal of Control Science and Engineering 3
Figure 2 Hardware-in-loop simulation system
O1
Z1
X1
Y1
D1 D2 D3D4
Z
X
Y
nO
b
Virtual deck surface
Horizontal
Lakebed
Figure 3 Underwater platform coordinate frame selection
3 Kinematic Analysis of Underwater Platform
31 Coordinate Framesrsquo Selection Kinematic analysis of theplatform requires two coordinate frames as indicated inFigure 3 The earth-fixed coordinate frame 119874119883119884119885 takes thehorizontal plane as datum known as 119899-coordinate frameDue to the deformation of platform the actual deck is acurve surface and it should be compensated into a flatsurface which is called ldquovirtual deck surfacerdquo The body-fixed coordinate frame119874
1119883111988411198851takes ldquovirtual deck surfacerdquo
as datum and its geometric center as origin known as 119887-coordinate frame where the geometric centers of actual deckand virtual deck are coincident
The platform viewed as rigid body is a six DOF parallelrobot as shown in Figure 3 Owing to special positioningmode the movement along 119883
1-axis and 119884
1-axis and the
rotation around 1198851are limited so the platform is a three
DOF underwater parallel robot actually In this system theposition and orientation of the platform are represented by
six parameters which contain coordinate values1198741(119909 119910 119911) of
the origin of the 119887-coordinate frame and Euler angles (120601 120579 120595)of the 119887-coordinate frame relative to the 119899-coordinate framewhere (120601 120579 120595) represent roll angle and pitch and yaw anglesWe select (119909 119910 119911 120601 120579 120595) as generalized coordinates of theplatform [17]
32 Kinematic Analysis Let Δ119894(119894 = 1 2 4) denote the
deformations of four corners on platform and the values ofdepth transducers are ℎ
119894(119894 = 1 2 4) so the depth of 119874
1
is ℎ1198741
= (14)((ℎ1minus Δ1) + (ℎ2minus Δ2) + (ℎ3minus Δ3) + (ℎ4minus Δ4))
Besides the work depth of platform is ℎLet 119886 119887 119888 denote the length width and height of the
platform respectively the coordinate values of 119860119894(119894 =
1 2 4) in the 119887-coordinate frame1198741119883111988411198851are acquired
as follows based upon the geometrical relationship
1198871198601= (minus
119886
2
119887
2Δ1)
119879
1198871198602= (minus
119886
2minus119887
2Δ2)
119879
1198871198603= (
119886
2minus119887
2Δ3)
119879
1198871198604= (
119886
2
119887
2Δ4)
119879
(1)
The coordinate value of arbitrary point named 119875 in 119887-coordinate frame is 119887119875 and 119899119875 denotes the coordinate valueof point 119875 in 119899-coordinate frame 119899
119887119877 is the rotation matrix of119887-coordinate with respect to 119899-coordinate 119899119875
119887(0 0 ℎ
1198741) is
the coordinate value of 119887-coordinate origin in 119899-coordinateThen (2) is acquired as follows
119899119875 =119899
119887119877 sdot119887119875+119899119875119887 (2)
where
119899
119887119877 = [
[
cos 120579 cos120595 sin120601 sin 120579 cos120595 minus cos120601 sin120595 cos120601 sin 120579 cos120595 + sin120601 sin120595cos 120579 sin120595 sin120601 sin 120579 sin120595 + cos120601 cos120595 cos120601 sin 120579 sin120595 minus sin120601 cos120595minus sin 120579 sin120601 cos 120579 cos120601 cos 120579
]
]
(3)
4 Journal of Control Science and Engineering
The coordinate values of 119860119894in 119899-coordinate frame can be
acquired based upon coordinate transformation as follows
1198991198601=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
1cos120601 sin 120579 cos120595 + Δ
1sin120601 sin120595
minus119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
1cos120601 sin 120579 sin120595 minus Δ
1sin120601 cos120595
ℎ1198741
+119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
1cos120601 cos 120579
]]]]]]]]]
]
1198991198602=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
2cos120601 sin 120579 cos120595 + Δ
2sin120601 sin120595
minus119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
2cos120601 sin 120579 sin120595 minus Δ
2sin120601 cos120595
ℎ1198741
+119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
2cos120601 cos 120579
]]]]]]]]]
]
1198991198603=
[[[[[[[[[
[
119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
3cos120601 sin 120579 cos120595 + Δ
3sin120601 sin120595
119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
3cos120601 sin 120579 sin120595 minus Δ
3sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
3cos120601 cos 120579
]]]]]]]]]
]
1198991198604=
[[[[[[[[[
[
119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
4cos120601 sin 120579 cos120595 + Δ
4sin120601 sin120595
119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
4cos120601 sin 120579 sin120595 minus Δ
4sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
4cos120601 cos 120579
]]]]]]]]]
]
(4)
During the whole diving process the orientation of platformis monitored to ensure steadiness Hence the roll and pitchangles of the platform are small (|120601 120579| le 5
∘) so the angle 120575is small as shown in Figure 4 Then it realizes the levelingcontrol of the platform based on orientation informationof the platform measured by high precision orientationtransducer 119860
119894represents the position before adjustment
119861119894represents the ideal position after adjustment and 119863
119894
represents the position of anchorThe Jacobian matrix of flexible parallel robot is defined
as the linear relation between the velocity of the driven cableand the velocity of the platform [18] In order to calculate theJacobianmatrix it is assumed that the bottomof the test waterarea is generally flat and the depth is119867The coordinate valuesof119863119894in 119899-coordinate frame are shown as follows
1198991198631= (minus
119886
2
119887
2119867)
119879
1198991198632= (minus
119886
2minus119887
2119867)
119879
1198991198633= (
119886
2minus119887
2119867)
119879
1198991198634= (
119886
2
119887
2119867)
119879
(5)
The length vector 119897119894= 119860119894119863119894expressed with respect to 119899-
coordinate frame can be computed by
997888119897119894=997888119903119860119894minus997888119903119863119894
(119894 = 1 2 3 4) (6)
Wedefine 119897 = [ 1198971
1198972
1198973
1198974]119879
as the velocity of the driven cableand specify the velocity of the platform as 119903
1198741represented by
translation along three axes and rotation around three axes ofthe 119887-coordinate frame as shown in
119897 = 119869 sdot 1199031198741
1199031198741
= [ 119910 120601 120579 ]119879
(7)
Journal of Control Science and Engineering 5
O1
Z1
X1
Y1
Z
X
Y
O
Ai
Bi
Di
rA119894 rO1
rD119894
120575
Figure 4 Orientation adjustment diagram
where Jacobian matrix 119869 is
119869 = [120597119897119894
120597119909
120597119897119894
120597119910
120597119897119894
120597119911
120597119897119894
120597120601
120597119897119894
120597120579
120597119897119894
120597120595] (119894 = 1 2 4) (8)
Proved by the calculation the Jacobian matrix is alwaysnonsingular in the workspace of the platform (|120601 120579| le 5
∘)Actually the lakebed environment is unknown so the
calculation result of cable length above is just an estimatedvalue which is not precise enough for leveling control ofplatform As the platform moves nearby the horizontalposition we take an approximate method for the calculationof cable length as follows
1003817100381710038171003817119863119894119860 1198941003817100381710038171003817 =
10038171003817100381710038171198631198941198611198941003817100381710038171003817 +
1003817100381710038171003817119860 1198941198611198941003817100381710038171003817 (9)
The variation of cable 119894 length Δ119897119894= 119861119894119860119894expressed with
respect to 119899-coordinate frame can be computed by
Δ
1003817100381710038171003817100381710038171003817
997888119897119894
1003817100381710038171003817100381710038171003817=10038171003817100381710038171003817
997888119903119861119894minus997888119903119860119894
10038171003817100381710038171003817(119894 = 1 2 3 4) (10)
The coordinate values of119861119894in 119899-coordinate frame are denoted
as follows
1198991198611= (minus
119886
2
119887
2ℎ minus Δ
1)
119879
1198991198612= (minus
119886
2minus119887
2ℎ minus Δ
2)
119879
1198991198613= (
119886
2minus119887
2ℎ minus Δ
3)
119879
1198991198614= (
119886
2
119887
2ℎ minus Δ
4)
119879
(11)
4 Dynamic Modeling of Joint Space
41 Dynamic Modeling of Underwater Platform The dynam-ical equations can be obtained based on the Newton-Eulermethod as shown in
119898 = 119872 + 119865119886
119868Ω + Ω times (119868Ω) = 119872119892+119872119886
(12)
where 119909 = [119909 119910 119911]119879 is the position vector of the 119887-
coordinate frame origin with respect to the 119899-coordinateframe 119898 is the mass of the platform with ballast tank full ofwater Ω is angular velocity of the 119887-coordinate frame 119872 isthe gravity and buoyancy of the platformwith ballast tank fullof water and 119868 is the moment of inertia of the platform in the119899-coordinate frame then 119868 =
119899
1198871198771198681198741
119899
119887119877119879 119872119892is the gravity
and buoyancy torque of the platform and 119865119886and119872
119886are the
external force and torque respectivelyThemoment of inertiaof the platform in 119887-coordinate frame is expressed in [19 20]
1198681198741
= [
[
119868119909119909
minus119868119909119910
minus119868119909119911
minus119868119910119909
119868119910119910
minus119868119910119911
minus119868119911119909
minus119868119911119910
119868119911119911
]
]
(13)
Here it is supposed that themass of the platform is uniformlydistributed so the center of gravity119866(119909
119892 119910119892 119911119892) is geometric
center of platform and the center of buoyancy 119861(119909119887 119910119887 119911119887) is
located right above the center of gravityThrough a series of transformations and substitutions the
dynamics model of the platform is expressed in terms of 120578generalized coordinates as the following general form [21]
119872(120578) 120578 + 119862 (120578 120578) 120578 + 119863 (120578 120578) 120578 + 119866 (120578) + 119889120578= 119865
120578 = 119869 (120578) V 119865 = minus119869119879120591
(14)
where 120578 denotes the position and orientation vectors withcoordinates in the 119899-coordinate frame V denotes the linearand angular velocity vectors with coordinates in the 119887-coordinate frame 119872(120578) is the inertia matrix of the platform(including added mass) 119862(120578 120578) is the matrix of Coriolisand centripetal terms (including added mass) 119863(120578 120578) is thedamping matrix of the platform 119866(120578) is vector of gravita-tional forces and torques and 119889
120578is the vector of external
disturbance terms Here 119865 is the force and torque vectorgenerated by winch and 120591 is the vector of control inputs bytensile force of cables The transformation matrix is shown asfollows
119869 (120578) = [119877119899
119887(Θ) 0
3times3
03times3
119879Θ(Θ)
] (15)
6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Control Science and Engineering
A1
A2A3
A4
D1
D2
D3
D4
P1
P2P3
P4
Figure 1 Platform structure
end-effector and the drive system respectively and thencarried out the scaled model experiment of system [10]
The existing parallel robot control applying in engineer-ing design can be divided into two categories one is jointspace based control and another is task space based controlboth have their certain advantages and disadvantages Jointspace based control mainly relies on kinematic relation ofthe parallel platform mechanism as well as dynamics modelof the driving devices task space based control howeverrequires dynamicsrsquo analysis of the platform to build thedynamics model of the platform [11] Considering the com-plexity of the underwater platform system and unknown fac-tors of underwater environment accurate dynamics modelof the underwater platform is hard to obtain therefore jointspace based control is applied in order to accomplish under-water platform controller design in this paper Given that thedriving device of the platform is hydraulic winch by usingthe accurate position servo control toward hydraulic winchdepth setting and orientation adjustment of the underwaterplatform can be realized As to practical applications thestrong nonlinearity as well as the uncertainty of both internalparameters and external load force of hydraulic servo systemhas contributed great difficulties to the leveling control sys-tem design Therefore many scholars have proposed variouscontrol algorithms in order to make profound study and thusto achieve the precise control of the platform
Adaptive backstepping design based on Lyapunovrsquos func-tion is an effective and systematic method for nonlinearsystem controller design The original backstepping controlmethods are designed for nonlinear systems with strictparameter feedbacks Guan et al provided a standardmethodof backstepping design to develop the controller [12ndash14] Inthe process however since the controller contains the param-eters adaptive law while adaptive law also contains controlvariables the system performance consequently degrades insuch loop nest Ruan et al made the assumption that the
initial coefficient value remained to be 1 or invariable beforeany system control input such a system was seldom used inpractical control system instead a variety of nonlinear sys-tems with nonstrict parameter feedbacks are usually appliedin practical application also the coefficients before systemcontrol input remained to be uncertain at most of the cases[15 16]
In this paper according to positioning mode of theplatform based on the kinematic and dynamic analysis ofsystem the joint space based control model is establishedThen an improved adaptive backstepping control method isproposed based on Lyapunovrsquos function for the single drivenjoint to overcome the influence from uncertain parameters ofsystem Besides we verify the performance of the proposedcontroller through digital simulations and individual exper-iments with single driven joint (an actual hydraulic winch)Finally based on the proposed leveling scheme the levelingcontrol simulations of platform rely on the hardware-in-loopsimulation system
2 System Description
The underwater platform mainly consists of platform ontol-ogy hydraulic winches wire ropes and gravity anchors asshown in Figure 1
Four tension winches are installed at points 1198601 1198602 1198603
and 1198604and four mooring winches are installed at points
1198751 1198752 1198753 and 119875
4 respectively Platform ontology always
has positive buoyancy with ballast tank All winches areconnected to four gravity anchors through cables which areserved as tension leg to keep the platform steady under waterFour depth transducers are installed at four corners of theplatform deck respectively and an orientation transducer isinstalled at the center of the platform deck It acquires depthand orientation information of the underwater platformwithhigh precision transducers then it controls the platformbased on the theory of parallel robotThe platform can realizehigh precision positioning at designated depth and meet theorientation requirement of carrying mechanism in certainworkspace
Both platform ontology and wire rope have a certainamount of deformation with external load The deformationof platform cannot be ignored because of the large size andit will be compensated during kinematics analysis The wirerope is always tensioning with work load in the process ofleveling control As a result of this the deformation of wirerope is constant so its variation is ignored in this paper
Hardware-in-loop simulation is a kind of technologywhich joins actual controller and model of the control objecton the computer together for experiment Complex systemslike the platform require a certain building period but itscontrol system needs to be designed a priori As a result ofthis it can only rely on the simulation without actual controlobject During the design process of the platformrsquos controlsystem we utilize the hardware-in-loop simulation system(see Figure 2) to simulate the actuator (hydraulic winch) andthe object (underwater platform) It will effectively shortenthe building period and avoid the waste of resources to acertain extent
Journal of Control Science and Engineering 3
Figure 2 Hardware-in-loop simulation system
O1
Z1
X1
Y1
D1 D2 D3D4
Z
X
Y
nO
b
Virtual deck surface
Horizontal
Lakebed
Figure 3 Underwater platform coordinate frame selection
3 Kinematic Analysis of Underwater Platform
31 Coordinate Framesrsquo Selection Kinematic analysis of theplatform requires two coordinate frames as indicated inFigure 3 The earth-fixed coordinate frame 119874119883119884119885 takes thehorizontal plane as datum known as 119899-coordinate frameDue to the deformation of platform the actual deck is acurve surface and it should be compensated into a flatsurface which is called ldquovirtual deck surfacerdquo The body-fixed coordinate frame119874
1119883111988411198851takes ldquovirtual deck surfacerdquo
as datum and its geometric center as origin known as 119887-coordinate frame where the geometric centers of actual deckand virtual deck are coincident
The platform viewed as rigid body is a six DOF parallelrobot as shown in Figure 3 Owing to special positioningmode the movement along 119883
1-axis and 119884
1-axis and the
rotation around 1198851are limited so the platform is a three
DOF underwater parallel robot actually In this system theposition and orientation of the platform are represented by
six parameters which contain coordinate values1198741(119909 119910 119911) of
the origin of the 119887-coordinate frame and Euler angles (120601 120579 120595)of the 119887-coordinate frame relative to the 119899-coordinate framewhere (120601 120579 120595) represent roll angle and pitch and yaw anglesWe select (119909 119910 119911 120601 120579 120595) as generalized coordinates of theplatform [17]
32 Kinematic Analysis Let Δ119894(119894 = 1 2 4) denote the
deformations of four corners on platform and the values ofdepth transducers are ℎ
119894(119894 = 1 2 4) so the depth of 119874
1
is ℎ1198741
= (14)((ℎ1minus Δ1) + (ℎ2minus Δ2) + (ℎ3minus Δ3) + (ℎ4minus Δ4))
Besides the work depth of platform is ℎLet 119886 119887 119888 denote the length width and height of the
platform respectively the coordinate values of 119860119894(119894 =
1 2 4) in the 119887-coordinate frame1198741119883111988411198851are acquired
as follows based upon the geometrical relationship
1198871198601= (minus
119886
2
119887
2Δ1)
119879
1198871198602= (minus
119886
2minus119887
2Δ2)
119879
1198871198603= (
119886
2minus119887
2Δ3)
119879
1198871198604= (
119886
2
119887
2Δ4)
119879
(1)
The coordinate value of arbitrary point named 119875 in 119887-coordinate frame is 119887119875 and 119899119875 denotes the coordinate valueof point 119875 in 119899-coordinate frame 119899
119887119877 is the rotation matrix of119887-coordinate with respect to 119899-coordinate 119899119875
119887(0 0 ℎ
1198741) is
the coordinate value of 119887-coordinate origin in 119899-coordinateThen (2) is acquired as follows
119899119875 =119899
119887119877 sdot119887119875+119899119875119887 (2)
where
119899
119887119877 = [
[
cos 120579 cos120595 sin120601 sin 120579 cos120595 minus cos120601 sin120595 cos120601 sin 120579 cos120595 + sin120601 sin120595cos 120579 sin120595 sin120601 sin 120579 sin120595 + cos120601 cos120595 cos120601 sin 120579 sin120595 minus sin120601 cos120595minus sin 120579 sin120601 cos 120579 cos120601 cos 120579
]
]
(3)
4 Journal of Control Science and Engineering
The coordinate values of 119860119894in 119899-coordinate frame can be
acquired based upon coordinate transformation as follows
1198991198601=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
1cos120601 sin 120579 cos120595 + Δ
1sin120601 sin120595
minus119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
1cos120601 sin 120579 sin120595 minus Δ
1sin120601 cos120595
ℎ1198741
+119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
1cos120601 cos 120579
]]]]]]]]]
]
1198991198602=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
2cos120601 sin 120579 cos120595 + Δ
2sin120601 sin120595
minus119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
2cos120601 sin 120579 sin120595 minus Δ
2sin120601 cos120595
ℎ1198741
+119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
2cos120601 cos 120579
]]]]]]]]]
]
1198991198603=
[[[[[[[[[
[
119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
3cos120601 sin 120579 cos120595 + Δ
3sin120601 sin120595
119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
3cos120601 sin 120579 sin120595 minus Δ
3sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
3cos120601 cos 120579
]]]]]]]]]
]
1198991198604=
[[[[[[[[[
[
119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
4cos120601 sin 120579 cos120595 + Δ
4sin120601 sin120595
119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
4cos120601 sin 120579 sin120595 minus Δ
4sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
4cos120601 cos 120579
]]]]]]]]]
]
(4)
During the whole diving process the orientation of platformis monitored to ensure steadiness Hence the roll and pitchangles of the platform are small (|120601 120579| le 5
∘) so the angle 120575is small as shown in Figure 4 Then it realizes the levelingcontrol of the platform based on orientation informationof the platform measured by high precision orientationtransducer 119860
119894represents the position before adjustment
119861119894represents the ideal position after adjustment and 119863
119894
represents the position of anchorThe Jacobian matrix of flexible parallel robot is defined
as the linear relation between the velocity of the driven cableand the velocity of the platform [18] In order to calculate theJacobianmatrix it is assumed that the bottomof the test waterarea is generally flat and the depth is119867The coordinate valuesof119863119894in 119899-coordinate frame are shown as follows
1198991198631= (minus
119886
2
119887
2119867)
119879
1198991198632= (minus
119886
2minus119887
2119867)
119879
1198991198633= (
119886
2minus119887
2119867)
119879
1198991198634= (
119886
2
119887
2119867)
119879
(5)
The length vector 119897119894= 119860119894119863119894expressed with respect to 119899-
coordinate frame can be computed by
997888119897119894=997888119903119860119894minus997888119903119863119894
(119894 = 1 2 3 4) (6)
Wedefine 119897 = [ 1198971
1198972
1198973
1198974]119879
as the velocity of the driven cableand specify the velocity of the platform as 119903
1198741represented by
translation along three axes and rotation around three axes ofthe 119887-coordinate frame as shown in
119897 = 119869 sdot 1199031198741
1199031198741
= [ 119910 120601 120579 ]119879
(7)
Journal of Control Science and Engineering 5
O1
Z1
X1
Y1
Z
X
Y
O
Ai
Bi
Di
rA119894 rO1
rD119894
120575
Figure 4 Orientation adjustment diagram
where Jacobian matrix 119869 is
119869 = [120597119897119894
120597119909
120597119897119894
120597119910
120597119897119894
120597119911
120597119897119894
120597120601
120597119897119894
120597120579
120597119897119894
120597120595] (119894 = 1 2 4) (8)
Proved by the calculation the Jacobian matrix is alwaysnonsingular in the workspace of the platform (|120601 120579| le 5
∘)Actually the lakebed environment is unknown so the
calculation result of cable length above is just an estimatedvalue which is not precise enough for leveling control ofplatform As the platform moves nearby the horizontalposition we take an approximate method for the calculationof cable length as follows
1003817100381710038171003817119863119894119860 1198941003817100381710038171003817 =
10038171003817100381710038171198631198941198611198941003817100381710038171003817 +
1003817100381710038171003817119860 1198941198611198941003817100381710038171003817 (9)
The variation of cable 119894 length Δ119897119894= 119861119894119860119894expressed with
respect to 119899-coordinate frame can be computed by
Δ
1003817100381710038171003817100381710038171003817
997888119897119894
1003817100381710038171003817100381710038171003817=10038171003817100381710038171003817
997888119903119861119894minus997888119903119860119894
10038171003817100381710038171003817(119894 = 1 2 3 4) (10)
The coordinate values of119861119894in 119899-coordinate frame are denoted
as follows
1198991198611= (minus
119886
2
119887
2ℎ minus Δ
1)
119879
1198991198612= (minus
119886
2minus119887
2ℎ minus Δ
2)
119879
1198991198613= (
119886
2minus119887
2ℎ minus Δ
3)
119879
1198991198614= (
119886
2
119887
2ℎ minus Δ
4)
119879
(11)
4 Dynamic Modeling of Joint Space
41 Dynamic Modeling of Underwater Platform The dynam-ical equations can be obtained based on the Newton-Eulermethod as shown in
119898 = 119872 + 119865119886
119868Ω + Ω times (119868Ω) = 119872119892+119872119886
(12)
where 119909 = [119909 119910 119911]119879 is the position vector of the 119887-
coordinate frame origin with respect to the 119899-coordinateframe 119898 is the mass of the platform with ballast tank full ofwater Ω is angular velocity of the 119887-coordinate frame 119872 isthe gravity and buoyancy of the platformwith ballast tank fullof water and 119868 is the moment of inertia of the platform in the119899-coordinate frame then 119868 =
119899
1198871198771198681198741
119899
119887119877119879 119872119892is the gravity
and buoyancy torque of the platform and 119865119886and119872
119886are the
external force and torque respectivelyThemoment of inertiaof the platform in 119887-coordinate frame is expressed in [19 20]
1198681198741
= [
[
119868119909119909
minus119868119909119910
minus119868119909119911
minus119868119910119909
119868119910119910
minus119868119910119911
minus119868119911119909
minus119868119911119910
119868119911119911
]
]
(13)
Here it is supposed that themass of the platform is uniformlydistributed so the center of gravity119866(119909
119892 119910119892 119911119892) is geometric
center of platform and the center of buoyancy 119861(119909119887 119910119887 119911119887) is
located right above the center of gravityThrough a series of transformations and substitutions the
dynamics model of the platform is expressed in terms of 120578generalized coordinates as the following general form [21]
119872(120578) 120578 + 119862 (120578 120578) 120578 + 119863 (120578 120578) 120578 + 119866 (120578) + 119889120578= 119865
120578 = 119869 (120578) V 119865 = minus119869119879120591
(14)
where 120578 denotes the position and orientation vectors withcoordinates in the 119899-coordinate frame V denotes the linearand angular velocity vectors with coordinates in the 119887-coordinate frame 119872(120578) is the inertia matrix of the platform(including added mass) 119862(120578 120578) is the matrix of Coriolisand centripetal terms (including added mass) 119863(120578 120578) is thedamping matrix of the platform 119866(120578) is vector of gravita-tional forces and torques and 119889
120578is the vector of external
disturbance terms Here 119865 is the force and torque vectorgenerated by winch and 120591 is the vector of control inputs bytensile force of cables The transformation matrix is shown asfollows
119869 (120578) = [119877119899
119887(Θ) 0
3times3
03times3
119879Θ(Θ)
] (15)
6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 3
Figure 2 Hardware-in-loop simulation system
O1
Z1
X1
Y1
D1 D2 D3D4
Z
X
Y
nO
b
Virtual deck surface
Horizontal
Lakebed
Figure 3 Underwater platform coordinate frame selection
3 Kinematic Analysis of Underwater Platform
31 Coordinate Framesrsquo Selection Kinematic analysis of theplatform requires two coordinate frames as indicated inFigure 3 The earth-fixed coordinate frame 119874119883119884119885 takes thehorizontal plane as datum known as 119899-coordinate frameDue to the deformation of platform the actual deck is acurve surface and it should be compensated into a flatsurface which is called ldquovirtual deck surfacerdquo The body-fixed coordinate frame119874
1119883111988411198851takes ldquovirtual deck surfacerdquo
as datum and its geometric center as origin known as 119887-coordinate frame where the geometric centers of actual deckand virtual deck are coincident
The platform viewed as rigid body is a six DOF parallelrobot as shown in Figure 3 Owing to special positioningmode the movement along 119883
1-axis and 119884
1-axis and the
rotation around 1198851are limited so the platform is a three
DOF underwater parallel robot actually In this system theposition and orientation of the platform are represented by
six parameters which contain coordinate values1198741(119909 119910 119911) of
the origin of the 119887-coordinate frame and Euler angles (120601 120579 120595)of the 119887-coordinate frame relative to the 119899-coordinate framewhere (120601 120579 120595) represent roll angle and pitch and yaw anglesWe select (119909 119910 119911 120601 120579 120595) as generalized coordinates of theplatform [17]
32 Kinematic Analysis Let Δ119894(119894 = 1 2 4) denote the
deformations of four corners on platform and the values ofdepth transducers are ℎ
119894(119894 = 1 2 4) so the depth of 119874
1
is ℎ1198741
= (14)((ℎ1minus Δ1) + (ℎ2minus Δ2) + (ℎ3minus Δ3) + (ℎ4minus Δ4))
Besides the work depth of platform is ℎLet 119886 119887 119888 denote the length width and height of the
platform respectively the coordinate values of 119860119894(119894 =
1 2 4) in the 119887-coordinate frame1198741119883111988411198851are acquired
as follows based upon the geometrical relationship
1198871198601= (minus
119886
2
119887
2Δ1)
119879
1198871198602= (minus
119886
2minus119887
2Δ2)
119879
1198871198603= (
119886
2minus119887
2Δ3)
119879
1198871198604= (
119886
2
119887
2Δ4)
119879
(1)
The coordinate value of arbitrary point named 119875 in 119887-coordinate frame is 119887119875 and 119899119875 denotes the coordinate valueof point 119875 in 119899-coordinate frame 119899
119887119877 is the rotation matrix of119887-coordinate with respect to 119899-coordinate 119899119875
119887(0 0 ℎ
1198741) is
the coordinate value of 119887-coordinate origin in 119899-coordinateThen (2) is acquired as follows
119899119875 =119899
119887119877 sdot119887119875+119899119875119887 (2)
where
119899
119887119877 = [
[
cos 120579 cos120595 sin120601 sin 120579 cos120595 minus cos120601 sin120595 cos120601 sin 120579 cos120595 + sin120601 sin120595cos 120579 sin120595 sin120601 sin 120579 sin120595 + cos120601 cos120595 cos120601 sin 120579 sin120595 minus sin120601 cos120595minus sin 120579 sin120601 cos 120579 cos120601 cos 120579
]
]
(3)
4 Journal of Control Science and Engineering
The coordinate values of 119860119894in 119899-coordinate frame can be
acquired based upon coordinate transformation as follows
1198991198601=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
1cos120601 sin 120579 cos120595 + Δ
1sin120601 sin120595
minus119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
1cos120601 sin 120579 sin120595 minus Δ
1sin120601 cos120595
ℎ1198741
+119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
1cos120601 cos 120579
]]]]]]]]]
]
1198991198602=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
2cos120601 sin 120579 cos120595 + Δ
2sin120601 sin120595
minus119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
2cos120601 sin 120579 sin120595 minus Δ
2sin120601 cos120595
ℎ1198741
+119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
2cos120601 cos 120579
]]]]]]]]]
]
1198991198603=
[[[[[[[[[
[
119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
3cos120601 sin 120579 cos120595 + Δ
3sin120601 sin120595
119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
3cos120601 sin 120579 sin120595 minus Δ
3sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
3cos120601 cos 120579
]]]]]]]]]
]
1198991198604=
[[[[[[[[[
[
119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
4cos120601 sin 120579 cos120595 + Δ
4sin120601 sin120595
119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
4cos120601 sin 120579 sin120595 minus Δ
4sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
4cos120601 cos 120579
]]]]]]]]]
]
(4)
During the whole diving process the orientation of platformis monitored to ensure steadiness Hence the roll and pitchangles of the platform are small (|120601 120579| le 5
∘) so the angle 120575is small as shown in Figure 4 Then it realizes the levelingcontrol of the platform based on orientation informationof the platform measured by high precision orientationtransducer 119860
119894represents the position before adjustment
119861119894represents the ideal position after adjustment and 119863
119894
represents the position of anchorThe Jacobian matrix of flexible parallel robot is defined
as the linear relation between the velocity of the driven cableand the velocity of the platform [18] In order to calculate theJacobianmatrix it is assumed that the bottomof the test waterarea is generally flat and the depth is119867The coordinate valuesof119863119894in 119899-coordinate frame are shown as follows
1198991198631= (minus
119886
2
119887
2119867)
119879
1198991198632= (minus
119886
2minus119887
2119867)
119879
1198991198633= (
119886
2minus119887
2119867)
119879
1198991198634= (
119886
2
119887
2119867)
119879
(5)
The length vector 119897119894= 119860119894119863119894expressed with respect to 119899-
coordinate frame can be computed by
997888119897119894=997888119903119860119894minus997888119903119863119894
(119894 = 1 2 3 4) (6)
Wedefine 119897 = [ 1198971
1198972
1198973
1198974]119879
as the velocity of the driven cableand specify the velocity of the platform as 119903
1198741represented by
translation along three axes and rotation around three axes ofthe 119887-coordinate frame as shown in
119897 = 119869 sdot 1199031198741
1199031198741
= [ 119910 120601 120579 ]119879
(7)
Journal of Control Science and Engineering 5
O1
Z1
X1
Y1
Z
X
Y
O
Ai
Bi
Di
rA119894 rO1
rD119894
120575
Figure 4 Orientation adjustment diagram
where Jacobian matrix 119869 is
119869 = [120597119897119894
120597119909
120597119897119894
120597119910
120597119897119894
120597119911
120597119897119894
120597120601
120597119897119894
120597120579
120597119897119894
120597120595] (119894 = 1 2 4) (8)
Proved by the calculation the Jacobian matrix is alwaysnonsingular in the workspace of the platform (|120601 120579| le 5
∘)Actually the lakebed environment is unknown so the
calculation result of cable length above is just an estimatedvalue which is not precise enough for leveling control ofplatform As the platform moves nearby the horizontalposition we take an approximate method for the calculationof cable length as follows
1003817100381710038171003817119863119894119860 1198941003817100381710038171003817 =
10038171003817100381710038171198631198941198611198941003817100381710038171003817 +
1003817100381710038171003817119860 1198941198611198941003817100381710038171003817 (9)
The variation of cable 119894 length Δ119897119894= 119861119894119860119894expressed with
respect to 119899-coordinate frame can be computed by
Δ
1003817100381710038171003817100381710038171003817
997888119897119894
1003817100381710038171003817100381710038171003817=10038171003817100381710038171003817
997888119903119861119894minus997888119903119860119894
10038171003817100381710038171003817(119894 = 1 2 3 4) (10)
The coordinate values of119861119894in 119899-coordinate frame are denoted
as follows
1198991198611= (minus
119886
2
119887
2ℎ minus Δ
1)
119879
1198991198612= (minus
119886
2minus119887
2ℎ minus Δ
2)
119879
1198991198613= (
119886
2minus119887
2ℎ minus Δ
3)
119879
1198991198614= (
119886
2
119887
2ℎ minus Δ
4)
119879
(11)
4 Dynamic Modeling of Joint Space
41 Dynamic Modeling of Underwater Platform The dynam-ical equations can be obtained based on the Newton-Eulermethod as shown in
119898 = 119872 + 119865119886
119868Ω + Ω times (119868Ω) = 119872119892+119872119886
(12)
where 119909 = [119909 119910 119911]119879 is the position vector of the 119887-
coordinate frame origin with respect to the 119899-coordinateframe 119898 is the mass of the platform with ballast tank full ofwater Ω is angular velocity of the 119887-coordinate frame 119872 isthe gravity and buoyancy of the platformwith ballast tank fullof water and 119868 is the moment of inertia of the platform in the119899-coordinate frame then 119868 =
119899
1198871198771198681198741
119899
119887119877119879 119872119892is the gravity
and buoyancy torque of the platform and 119865119886and119872
119886are the
external force and torque respectivelyThemoment of inertiaof the platform in 119887-coordinate frame is expressed in [19 20]
1198681198741
= [
[
119868119909119909
minus119868119909119910
minus119868119909119911
minus119868119910119909
119868119910119910
minus119868119910119911
minus119868119911119909
minus119868119911119910
119868119911119911
]
]
(13)
Here it is supposed that themass of the platform is uniformlydistributed so the center of gravity119866(119909
119892 119910119892 119911119892) is geometric
center of platform and the center of buoyancy 119861(119909119887 119910119887 119911119887) is
located right above the center of gravityThrough a series of transformations and substitutions the
dynamics model of the platform is expressed in terms of 120578generalized coordinates as the following general form [21]
119872(120578) 120578 + 119862 (120578 120578) 120578 + 119863 (120578 120578) 120578 + 119866 (120578) + 119889120578= 119865
120578 = 119869 (120578) V 119865 = minus119869119879120591
(14)
where 120578 denotes the position and orientation vectors withcoordinates in the 119899-coordinate frame V denotes the linearand angular velocity vectors with coordinates in the 119887-coordinate frame 119872(120578) is the inertia matrix of the platform(including added mass) 119862(120578 120578) is the matrix of Coriolisand centripetal terms (including added mass) 119863(120578 120578) is thedamping matrix of the platform 119866(120578) is vector of gravita-tional forces and torques and 119889
120578is the vector of external
disturbance terms Here 119865 is the force and torque vectorgenerated by winch and 120591 is the vector of control inputs bytensile force of cables The transformation matrix is shown asfollows
119869 (120578) = [119877119899
119887(Θ) 0
3times3
03times3
119879Θ(Θ)
] (15)
6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Control Science and Engineering
The coordinate values of 119860119894in 119899-coordinate frame can be
acquired based upon coordinate transformation as follows
1198991198601=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
1cos120601 sin 120579 cos120595 + Δ
1sin120601 sin120595
minus119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
1cos120601 sin 120579 sin120595 minus Δ
1sin120601 cos120595
ℎ1198741
+119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
1cos120601 cos 120579
]]]]]]]]]
]
1198991198602=
[[[[[[[[[
[
minus119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
2cos120601 sin 120579 cos120595 + Δ
2sin120601 sin120595
minus119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
2cos120601 sin 120579 sin120595 minus Δ
2sin120601 cos120595
ℎ1198741
+119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
2cos120601 cos 120579
]]]]]]]]]
]
1198991198603=
[[[[[[[[[
[
119886
2cos 120579 cos120595 minus
119887
2sin120601 sin 120579 cos120595 +
119887
2cos120601 sin120595 + Δ
3cos120601 sin 120579 cos120595 + Δ
3sin120601 sin120595
119886
2cos 120579 sin120595 minus
119887
2sin120601 sin 120579 sin120595 minus
119887
2cos120601 cos120595 + Δ
3cos120601 sin 120579 sin120595 minus Δ
3sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 minus 119887
2sin120601 cos 120579 + Δ
3cos120601 cos 120579
]]]]]]]]]
]
1198991198604=
[[[[[[[[[
[
119886
2cos 120579 cos120595 +
119887
2sin120601 sin 120579 cos120595 minus
119887
2cos120601 sin120595 + Δ
4cos120601 sin 120579 cos120595 + Δ
4sin120601 sin120595
119886
2cos 120579 sin120595 +
119887
2sin120601 sin 120579 sin120595 +
119887
2cos120601 cos120595 + Δ
4cos120601 sin 120579 sin120595 minus Δ
4sin120601 cos120595
ℎ1198741
minus119886
2sin 120579 + 119887
2sin120601 cos 120579 + Δ
4cos120601 cos 120579
]]]]]]]]]
]
(4)
During the whole diving process the orientation of platformis monitored to ensure steadiness Hence the roll and pitchangles of the platform are small (|120601 120579| le 5
∘) so the angle 120575is small as shown in Figure 4 Then it realizes the levelingcontrol of the platform based on orientation informationof the platform measured by high precision orientationtransducer 119860
119894represents the position before adjustment
119861119894represents the ideal position after adjustment and 119863
119894
represents the position of anchorThe Jacobian matrix of flexible parallel robot is defined
as the linear relation between the velocity of the driven cableand the velocity of the platform [18] In order to calculate theJacobianmatrix it is assumed that the bottomof the test waterarea is generally flat and the depth is119867The coordinate valuesof119863119894in 119899-coordinate frame are shown as follows
1198991198631= (minus
119886
2
119887
2119867)
119879
1198991198632= (minus
119886
2minus119887
2119867)
119879
1198991198633= (
119886
2minus119887
2119867)
119879
1198991198634= (
119886
2
119887
2119867)
119879
(5)
The length vector 119897119894= 119860119894119863119894expressed with respect to 119899-
coordinate frame can be computed by
997888119897119894=997888119903119860119894minus997888119903119863119894
(119894 = 1 2 3 4) (6)
Wedefine 119897 = [ 1198971
1198972
1198973
1198974]119879
as the velocity of the driven cableand specify the velocity of the platform as 119903
1198741represented by
translation along three axes and rotation around three axes ofthe 119887-coordinate frame as shown in
119897 = 119869 sdot 1199031198741
1199031198741
= [ 119910 120601 120579 ]119879
(7)
Journal of Control Science and Engineering 5
O1
Z1
X1
Y1
Z
X
Y
O
Ai
Bi
Di
rA119894 rO1
rD119894
120575
Figure 4 Orientation adjustment diagram
where Jacobian matrix 119869 is
119869 = [120597119897119894
120597119909
120597119897119894
120597119910
120597119897119894
120597119911
120597119897119894
120597120601
120597119897119894
120597120579
120597119897119894
120597120595] (119894 = 1 2 4) (8)
Proved by the calculation the Jacobian matrix is alwaysnonsingular in the workspace of the platform (|120601 120579| le 5
∘)Actually the lakebed environment is unknown so the
calculation result of cable length above is just an estimatedvalue which is not precise enough for leveling control ofplatform As the platform moves nearby the horizontalposition we take an approximate method for the calculationof cable length as follows
1003817100381710038171003817119863119894119860 1198941003817100381710038171003817 =
10038171003817100381710038171198631198941198611198941003817100381710038171003817 +
1003817100381710038171003817119860 1198941198611198941003817100381710038171003817 (9)
The variation of cable 119894 length Δ119897119894= 119861119894119860119894expressed with
respect to 119899-coordinate frame can be computed by
Δ
1003817100381710038171003817100381710038171003817
997888119897119894
1003817100381710038171003817100381710038171003817=10038171003817100381710038171003817
997888119903119861119894minus997888119903119860119894
10038171003817100381710038171003817(119894 = 1 2 3 4) (10)
The coordinate values of119861119894in 119899-coordinate frame are denoted
as follows
1198991198611= (minus
119886
2
119887
2ℎ minus Δ
1)
119879
1198991198612= (minus
119886
2minus119887
2ℎ minus Δ
2)
119879
1198991198613= (
119886
2minus119887
2ℎ minus Δ
3)
119879
1198991198614= (
119886
2
119887
2ℎ minus Δ
4)
119879
(11)
4 Dynamic Modeling of Joint Space
41 Dynamic Modeling of Underwater Platform The dynam-ical equations can be obtained based on the Newton-Eulermethod as shown in
119898 = 119872 + 119865119886
119868Ω + Ω times (119868Ω) = 119872119892+119872119886
(12)
where 119909 = [119909 119910 119911]119879 is the position vector of the 119887-
coordinate frame origin with respect to the 119899-coordinateframe 119898 is the mass of the platform with ballast tank full ofwater Ω is angular velocity of the 119887-coordinate frame 119872 isthe gravity and buoyancy of the platformwith ballast tank fullof water and 119868 is the moment of inertia of the platform in the119899-coordinate frame then 119868 =
119899
1198871198771198681198741
119899
119887119877119879 119872119892is the gravity
and buoyancy torque of the platform and 119865119886and119872
119886are the
external force and torque respectivelyThemoment of inertiaof the platform in 119887-coordinate frame is expressed in [19 20]
1198681198741
= [
[
119868119909119909
minus119868119909119910
minus119868119909119911
minus119868119910119909
119868119910119910
minus119868119910119911
minus119868119911119909
minus119868119911119910
119868119911119911
]
]
(13)
Here it is supposed that themass of the platform is uniformlydistributed so the center of gravity119866(119909
119892 119910119892 119911119892) is geometric
center of platform and the center of buoyancy 119861(119909119887 119910119887 119911119887) is
located right above the center of gravityThrough a series of transformations and substitutions the
dynamics model of the platform is expressed in terms of 120578generalized coordinates as the following general form [21]
119872(120578) 120578 + 119862 (120578 120578) 120578 + 119863 (120578 120578) 120578 + 119866 (120578) + 119889120578= 119865
120578 = 119869 (120578) V 119865 = minus119869119879120591
(14)
where 120578 denotes the position and orientation vectors withcoordinates in the 119899-coordinate frame V denotes the linearand angular velocity vectors with coordinates in the 119887-coordinate frame 119872(120578) is the inertia matrix of the platform(including added mass) 119862(120578 120578) is the matrix of Coriolisand centripetal terms (including added mass) 119863(120578 120578) is thedamping matrix of the platform 119866(120578) is vector of gravita-tional forces and torques and 119889
120578is the vector of external
disturbance terms Here 119865 is the force and torque vectorgenerated by winch and 120591 is the vector of control inputs bytensile force of cables The transformation matrix is shown asfollows
119869 (120578) = [119877119899
119887(Θ) 0
3times3
03times3
119879Θ(Θ)
] (15)
6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 5
O1
Z1
X1
Y1
Z
X
Y
O
Ai
Bi
Di
rA119894 rO1
rD119894
120575
Figure 4 Orientation adjustment diagram
where Jacobian matrix 119869 is
119869 = [120597119897119894
120597119909
120597119897119894
120597119910
120597119897119894
120597119911
120597119897119894
120597120601
120597119897119894
120597120579
120597119897119894
120597120595] (119894 = 1 2 4) (8)
Proved by the calculation the Jacobian matrix is alwaysnonsingular in the workspace of the platform (|120601 120579| le 5
∘)Actually the lakebed environment is unknown so the
calculation result of cable length above is just an estimatedvalue which is not precise enough for leveling control ofplatform As the platform moves nearby the horizontalposition we take an approximate method for the calculationof cable length as follows
1003817100381710038171003817119863119894119860 1198941003817100381710038171003817 =
10038171003817100381710038171198631198941198611198941003817100381710038171003817 +
1003817100381710038171003817119860 1198941198611198941003817100381710038171003817 (9)
The variation of cable 119894 length Δ119897119894= 119861119894119860119894expressed with
respect to 119899-coordinate frame can be computed by
Δ
1003817100381710038171003817100381710038171003817
997888119897119894
1003817100381710038171003817100381710038171003817=10038171003817100381710038171003817
997888119903119861119894minus997888119903119860119894
10038171003817100381710038171003817(119894 = 1 2 3 4) (10)
The coordinate values of119861119894in 119899-coordinate frame are denoted
as follows
1198991198611= (minus
119886
2
119887
2ℎ minus Δ
1)
119879
1198991198612= (minus
119886
2minus119887
2ℎ minus Δ
2)
119879
1198991198613= (
119886
2minus119887
2ℎ minus Δ
3)
119879
1198991198614= (
119886
2
119887
2ℎ minus Δ
4)
119879
(11)
4 Dynamic Modeling of Joint Space
41 Dynamic Modeling of Underwater Platform The dynam-ical equations can be obtained based on the Newton-Eulermethod as shown in
119898 = 119872 + 119865119886
119868Ω + Ω times (119868Ω) = 119872119892+119872119886
(12)
where 119909 = [119909 119910 119911]119879 is the position vector of the 119887-
coordinate frame origin with respect to the 119899-coordinateframe 119898 is the mass of the platform with ballast tank full ofwater Ω is angular velocity of the 119887-coordinate frame 119872 isthe gravity and buoyancy of the platformwith ballast tank fullof water and 119868 is the moment of inertia of the platform in the119899-coordinate frame then 119868 =
119899
1198871198771198681198741
119899
119887119877119879 119872119892is the gravity
and buoyancy torque of the platform and 119865119886and119872
119886are the
external force and torque respectivelyThemoment of inertiaof the platform in 119887-coordinate frame is expressed in [19 20]
1198681198741
= [
[
119868119909119909
minus119868119909119910
minus119868119909119911
minus119868119910119909
119868119910119910
minus119868119910119911
minus119868119911119909
minus119868119911119910
119868119911119911
]
]
(13)
Here it is supposed that themass of the platform is uniformlydistributed so the center of gravity119866(119909
119892 119910119892 119911119892) is geometric
center of platform and the center of buoyancy 119861(119909119887 119910119887 119911119887) is
located right above the center of gravityThrough a series of transformations and substitutions the
dynamics model of the platform is expressed in terms of 120578generalized coordinates as the following general form [21]
119872(120578) 120578 + 119862 (120578 120578) 120578 + 119863 (120578 120578) 120578 + 119866 (120578) + 119889120578= 119865
120578 = 119869 (120578) V 119865 = minus119869119879120591
(14)
where 120578 denotes the position and orientation vectors withcoordinates in the 119899-coordinate frame V denotes the linearand angular velocity vectors with coordinates in the 119887-coordinate frame 119872(120578) is the inertia matrix of the platform(including added mass) 119862(120578 120578) is the matrix of Coriolisand centripetal terms (including added mass) 119863(120578 120578) is thedamping matrix of the platform 119866(120578) is vector of gravita-tional forces and torques and 119889
120578is the vector of external
disturbance terms Here 119865 is the force and torque vectorgenerated by winch and 120591 is the vector of control inputs bytensile force of cables The transformation matrix is shown asfollows
119869 (120578) = [119877119899
119887(Θ) 0
3times3
03times3
119879Θ(Θ)
] (15)
6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Control Science and Engineering
where
119877119899
119887(Θ) =
119899
119887119877 119877
119899
119887(Θ)minus1
= 119877119899
119887(Θ)119879
119879Θ(Θ) =
[[
[
1 sin120601 tan 120579 cos120601 tan 1205790 cos120601 minus sin120601
0sin120601cos 120579
cos120601cos 120579
]]
]
119879minus1
Θ(Θ) = [
[
1 0 minus sin 1205790 cos120601 cos 120579 sin1206010 minus sin120601 cos 120579 cos120601
]
]
(16)
It is difficult to establish an accurate dynamics model for theplatform due to the nonlinear characteristic of the overallsystem complicated underwater environment and manyother uncertainties Considering the low velocity of theplatform underwater we utilize the method based on jointspace to realize the control of the platform
42 Dynamic Modeling of Driving System Considering theunderwater dynamic sealing and heavy load the hydraulicdriving mode is chosen for the system The hydraulic systemadopts valve control with quantitative pump and motorfor power supply as well as keeping running smooth inoverrunning load condition with respect to the balance valveThe driving system of platform is mainly composed of oilsource electrohydraulic servo valve hydraulic motor servoamplifier and load as shown in Figure 5
The dynamics model of hydraulic system is mainly com-posed of the following three equations [22] In this sectionwe introduce a nonlinear mathematic model of the system
The flow equation of servo valve is described as
119876119871= 119862119889120596119909Vradic
1
120588(119875119878minus 119875119871sgn (119909V)) (17)
where119876119871is the load flow 119862
119889is the discharge coefficient 120596 is
the area gradient 119909V is the displacement of the spool in theservo valve 119875
119878is the supply pressure of the pump 119875
119871is the
load pressure and 120588 is the hydraulic oil densityThe continuity equation of the motor is
119876119871= 119863119898
120579119898+ 119862119905119898119875119871+119881119898
4120573119890
119871 (18)
where 119863119898is the volumetric displacement of the hydraulic
motor 120579119898is the rotor angle of motor rotor 119862
119905119898is the total
leakage coefficient 119881119898is the total actuator volume and 120573
119890is
the effective bulk modulus of the systemAs the servo valve dynamics are often sufficiently fast
they can be ignored in this paper Therefore
1198701=
119894
119906 119870
2=119909V
119894 (19)
where1198701is the servo amplifier gain119870
2is the servo valve gain
119906 is the controller output voltage and 119894 is the input current ofthe servo valve
The platform can be viewed as a rigid body so the loadtorsional spring stiffness 119866 = 0 The torque balance equationof the motor is
119879119904= 119863119898119875119871= 119869119898
120579119898+ 119861119898
120579119898+ 119879119871 (20)
where 119879119904is the torque generated by hydraulic motor 119869
119898is
the inertia of hydraulic motor and load 119861119898is the viscous
damping coefficient of hydraulic motor and load and 119879119871is
the external load torque
43 Dynamic Modeling of Joint Space The driving system ofthe platform is hydraulic winch which consists of hydraulicmotor reducer and capstan Cables with high modulus ofelasticity are selected so elastic deformation is negligibleTherelation between length variation of cable and rotor angle ofmotor is shown as follows
120579119898=119899 sdot Δ 119897
119903 (21)
where 120579119898denotes the rotor angle ofmotor 119903 denotes radius of
the capstan 119899 denotes reduction ratio and Δ119897 denotes thelength variation of cable
Then 120579119898= (119899119903) sdot 119897 120579
119898= (119899119903) sdot 119897
With Jacobian matrix we can acquire
120578 = (119903
119899) 119869minus1 120579119898 120578 = (
119903
119899) ( 119869minus1 120579119898+ 119869minus1 120579119898) (22)
So dynamics equation of the platform can be transformedfrom task space to joint space as shown in
1198601015840 120579119898+ 1198611015840 120579119898+ 1198661015840+ 1198791015840
119889= 1198791015840 (23)
Here 1198601015840 is equivalent inertia matrix of joint space and 1198611015840 is
equivalent viscous damping coefficient matrix of joint spaceThe coefficients of (23) are expressed as
1198601015840= (
1199032
119899) 119869minus119879119872(120578) 119869
minus1
1198791015840
119889= 119903 sdot 119869
minus119879119889120578 119879
1015840= minus119903 sdot 120591
1198611015840= (
1199032
119899) sdot (119869
minus119879119872(120578) 119869
minus1+ 119869minus119879119862 (120578 120578) 119869
minus1
+ 119869minus119879119863(120578 120578) 119869
minus1)1198661015840
= 119903 sdot 119869minus119879119866 (120578)
(24)
The platform moves nearby the horizontal position As aresult of this we define the value of1198601015840 as119860
0= [1198860119894119895]4times4
whenthe platform is in the horizontal position The dynamicalequation matrix of the platform joint space is shown in
[119886119894119895]4times4
sdot 1205791198984times1
+ [119887119894119895]4times4
sdot 1205791198984times1
+ [119892119894]4times1
+ [119905119889119894]4times1
= [119905119894]4times1
(119894 119895 = 1 2 3 4)
(25)
Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 7
1
2
3
4
5
6
7
8
910
1112
13
14
15
16
17 1819
20
P
T
PTA
1
B
B
A
A
ax by
Y
x
y
a b
E
E
E
Figure 5 Hydraulic principle diagram of the winch
As to build driving branches controlling dynamics model ofinverse dynamics of the platform we rewrite (23) as shown in
1198860119894119894sdot 120579119898119894+ 119887119894sdot 120579119898119894+ 119865119894
1015840= 119905119894
(119894 = 1 2 3 4) (26)
where
119865119894
1015840= 119886119894119894sdot 120579119898119894+
4
sum
119895=1
119895 = 119894
119886119894119895sdot 120579119898119895
+ 119887119894119894sdot 120579119898119894
+
4
sum
119895=1
119895 = 119894
119887119894119895sdot 120579119898119895
+ 119892119894+ 119905119889119894minus 1198860119894119894sdot 120579119898119894minus 119887119894sdot 120579119898119894
(27)
is viewed as dynamic coupling interference force which actson the driving branch 119894
Therefore the dynamics model of the platform is dividedinto two parts the first part is standard driving branchcontrolling dynamical model expressed as 119886
0119894119894sdot 120579119898119894
+ 119887119894sdot 120579119898119894
the other part is dynamic coupling interference model thatacts on the driving branch 119894
Aiming at the driving branch of the platform the torquebalance equation of the motor is shown in
119879119904119894= 119869119898119894
120579119898119894+ 119861119898119894
120579119898119894+ 119879119871 119894
(119894 = 1 2 3 4) (28)
On the basis of (26) inertia of hydraulic motor and load isdenoted as 119869
119898119894= 1198860119894119894 viscous damping coefficient is denoted
as 119861119898119894
= 119887119894 external load torque which acts on the motor
drive shaft is denoted as 119879119871 119894
= 119865119894
1015840 and torque generated byhydraulic motor is denoted as 119879
119904119894= 119905119894
The trajectory of the platform is nearby the horizontalposition with limited amplitude and it is far away from thesingular area Therefore the external load torque on themotor shaft is continuous and bounded As a result of thisthe dynamic coupling torque that acts on the driving branchcan be seen as external disturbance torque including inertiadamping and gravitybuoyancy torques [23]
We aimat single tension leg during the formula derivationof joint space controller design so the subscript 119894 will beomitted below for convenience
Take 119909 = [1199091
1199092
1199093] = [120579
119898120579119898
119879119904] as the state
variables where 1199091is the rotor angle of motor rotor 119909
2is
the velocity of motor rotor and 1199093is the torque generated by
8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Control Science and Engineering
Expected attitude of platform
Calculation of cable adjustment
lengthPLC
controllerHydraulic
winchUnderwater
platform
Tension detection
Depth and attitude transducers
Figure 6 Control principle diagram
hydraulic motor The coefficient of 119906 is written in the formof reciprocal to make the controller design convenient Thestate space description for the dynamics model of joint spaceobtained from formulas (17)ndash(28) is described as
1= 1199092
2= 11988611199092+ (
1
1198862
)1199093+ 119889
3= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906
(29)
where
1198861= minus
119861119898
119869119898
1198862= 119869119898
119889 = minus119879119871
119869119898
1198871= minus
41198632
119898120573119890
119881119898
1198872= minus
4119862119905119898120573119890
119881119898
1198873=
119881119898radic120588
411986311989812057311989011986211988912059611987011198702
119892 (119909V) = radic119875119878minus 119875119871sgn (119909V)
(30)
119906 is the system input
5 Design of Adaptive Backstepping Controller
In this paper we mainly view the leveling control of theplatform Based on the working characteristics of the plat-form the joint space based control method is chosen so theprecision of system will depend on precision of single drivenjoint Besides an improved adaptive backstepping controlmethod is proposed based on Lyapunovrsquos function for thesingle driven joint to overcome the influence from uncertainparameters of system In order to avoid the overrunning loadcondition of hydraulic system the ldquolowest point fixed angleerrorrdquo leveling scheme called ldquochaserdquo is chosen for the levelingcontrol of platformThis leveling scheme means that we keepthe lowest point fixed and adjust the other points to makethe roll angle of platform tend to zero first and then adjustthe pitch angle to zero in the same way so as to realize theleveling of platform ultimatelyThe control principle diagramis shown in Figure 6
With the joint space control method we design adaptivebackstepping controller for single driven joint of the systemand give adaptive law of the uncertain coefficients based on
Lyapunovrsquos stability theory [24ndash28] In the following derivedprocess 119909
119894(119894 = 1 2 3) are the real values of system state
variables 119909119894119889(119894 = 1 2 3) are the expectation values of
system state variables and 119888119894gt 0 (1 2 3) are the controller
parametersJoint space controller design firstly define error as
follows
1198901= 1199091minus 1199091119889 (31)
Differentiate (31) as follows
1198901= 1minus 1119889
= 1199092minus 1119889 (32)
So there is a Lyapunov function as follows
1198811=1
21198902
1ge 0 (33)
Differentiating (33) gives us
1= 11989011198901= 1198901(1199092minus 1119889) (34)
Define error 1198902as
1198902= 1199092minus 1199092119889 (35)
where 1199092119889
is the first virtual control variable Consider
1199092119889
= 1119889minus 11988811198901 (36)
Substituting (35) and (36) in (34) results in
1= minus11988811198902
1+ 11989011198902 (37)
If 1198902= 0 then
1le 0 We need to do the next step of design
Differentiating (35) gives us
1198902= 2minus 2119889
= 11988611199092+ (
1
1198862
)1199093+ 119889 minus
2119889 (38)
In order to avoid the nesting problem that the adaptive lawsof 1198862and 3include the virtual control variable 119909
3119889and 119906 we
add coefficient in front of 1198902and 1198903during the selecting of the
Lyapunov functions 1198812and 119881
3
Select another Lyapunov function as follows
1198812= 1198811+1
211988621198902
2ge 0 (39)
Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 9
0 05 1 15 2 25 3
0Backstepping control
Time (s)
Posit
ion
(m)
Ideal positionPosition tracking
0 05 1 15 2 25 30
0002000400060008
001
Time (s)
Erro
r (m
)
Position error
minus001minus0008minus0006minus0004minus0002
Figure 7 The response of adaptive backstepping controller
0 01 02 03 04 05 06 07 08 09 1
0 PID control
Posit
ion
(m)
0 01 02 03 04 05 06 07 08 09 1
05
10
Ideal positionPosition tracking
Time (s)
Time (s)
Erro
r (m
)
Position error
minus0015
minus001
minus0005
times10minus3
minus5
Figure 8 The response of PID controller
Differentiate (39) as follows
2= 11989011198902minus 11988811198902
1+ 119886211989021198902
= 11989011198902minus 11988811198902
1+ 1198902(12059111199092+ 1199093+ 1205912minus 11988622119889)
(40)
where 1205911= 11988611198862and 1205912= 1198862119889
Define 1205911= 1205911minus 1205911 1205912= 1205912minus 1205912 1198862= 1198862minus 1198862 and
3= 1198873minus 3 Here 120591
1 1205912 1198862 and
3are the estimated values of
1205911 1205912 1198862 and 119887
3
Define the error as
1198903= 1199093minus 1199093119889 (41)
Here 1199093119889
is the second virtual control variable Consider
1199093119889
= minus1198901minus 12059111199092minus 1205912+ 11988622119889minus 11988821198902 (42)
Substituting (41) and (42) in (40) results in
2= minus11988811198902
1minus 11988821198902
2+ 11989021198903+ 1198902(12059111199092+ 1205912minus 11988622119889) (43)
If 1198903= 0 then
2le 0 We need to do the next step of design
Differentiating (41) gives us
1198903= 3minus 3119889
= 11988711199092+ 11988721199093+ (
1
1198873
)119892 (119909V) 119906 minus 3119889 (44)
Select another Lyapunov function as follows
1198813= 1198812+1
211988731198902
3+1
212058211205912
1+1
212058221205912
2+1
212058231198862
2+1
212058242
3 (45)
where 120582119894gt 0 (119894 = 1 4)
Differentiate (45) as follows
3= minus 119888
11198902
1minus 11988821198902
2+ 1198902(12059111199092+ 1205912minus 11988622119889)
+ 1198903(1198902+ 12059131199092+ 12059141199093+ 119892 (119909V) 119906 minus 119887
33119889)
minus 120582112059111205911minus 120582212059121205912minus 120582311988621198862minus 12058243
1198873
(46)
Here 1205913
= 11988711198873and 120591
4= 11988721198873 In this paper we mainly
consider the uncertainties of total inertia of hydraulic 119869119898
viscous damping coefficient 119861119898 and external load torque 119879
119871
so 1205913and 1205914are constant
Therefore the output of the controller is expressed in
119906 =1
119892 (119909V)(minus1198902minus 12059131199092minus 12059141199093+ 33119889minus 11988831198903) (47)
where
3119889
= minus (1 + 1205911+ 11988811198862+ 11988611198882+ 11988811198882+ 11988611205911+ 119888111988611198862) 1199092
minus (1198882+ 1205911+ 11988811198862) (
1
1198862
)1199093+ (1 + 119888
11198882+ 11988811198862) 1119889
+ (11988811198862+ 1198882+ 1198862) 1119889
+ 11988621119889minus (11988811198862+ 1198882+ 1205911) 119889 minus 120591
2
(48)
Substituting (47) and (48) in (46) results in
3= minus 119888
11198902
1minus 11988821198902
2minus 11988831198902
3+ 1205911(11989021199092minus 12058211205911)
+ 1205912(1198902minus 12058221205912) minus 1198862(11989022119889+ 12058231198862)
minus 3(11989033119889+ 1205824
1198873)
(49)
So the adaptation law is chosen as
1205911=
1
1205821
11989021199092 120591
2=
1
1205822
1198902
1198862= minus
1
1205823
11989022119889
1198873= minus
1
1205824
11989033119889
(50)
6 Simulation and Experiment
Firstly digital simulation of the hydraulic system is done toprove rationality of the model and controller secondly an
10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Journal of Control Science and Engineering
Figure 9 The individual experiment equipments
Figure 10 The result of wire rope draw-in at 001m
Figure 11 The result of wire rope draw-in at 01m
Figure 12 Actual controller and hardware-in-loop system
Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 11
0 5 10 15 20 25 300
05
1
15
2
25
3A
ngle
(deg
)
RollPitch
Time (s)
(a)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
minus3
minus25
minus2
minus15
minus1
minus05
Time (s)
(b)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(c)
Ang
le (d
eg)
RollPitch
0 5 10 15 20 25 30
0
1
2
3
minus3
minus2
minus1
Time (s)
(d)
Figure 13 The leveling control with adaptive backstepping controller
actual hydraulic winch is taken to perform the individualexperiment based on digital simulation then we carryout hardware-in-loop simulation for leveling control of theplatform which verifies effectiveness of the proposed controlmethod further According to the design of underwaterplatform and hydraulic winch the primary parameters ofsystem are given as shown in Table 1 Moment of inertia ofthe platform in 119887-coordinate frame (in kg sdotm2 unit)
1198681198741
= [
[
729 times 106
0 0
0 657 times 107
0
0 0 648 times 107
]
]
(51)
During the practical experiment of underwater platformthe parameters of the hydraulic system will change withthe changing of environment slowly especially the externalload torque on the motor Because of the special work envi-ronment of underwater platform the variations of platformorientation hydrodynamic force and flowwill affect the forceon the platform Hence we consider the hydrodynamic forceand interference torque as a component of external loadtorque on the motor So wemainly consider the uncertaintiesof total inertia of hydraulic 119869
119898 viscous damping coefficient
119861119898 and external load torque 119879
119871 It is assumed that they vary
slowly with time as follows
119869119898= 1198691198980
+ 011198691198980
sin (2120587119905)
119861119898= 1198611198980
+ 011198611198980
sin (2120587119905)
119879119871= 1198791198710+ 02119879
1198710sin (2120587119905)
(52)
61 Digital Simulation In this section we utilizeMATLAB tocompare effectiveness of the adaptive backstepping controllerwith conventional PID controller
The parameters of the adaptive backstepping controllerbased on joint space control are as follows
1198881= 90 119888
2= 15 119888
3= 90
1205821= 1 times 10
5 120582
2= 4 times 10
7
1205823= 1 times 10
5 120582
4= 1 times 10
5
(53)
The parameters of conventional PID controller are as follows
119870119901= 05 119870
119894= 01 119870
119889= 01 (54)
The simulation is done with minus001m position input whichsignifies the wire rope draw-in and the results are shown inFigures 7 and 8
12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Journal of Control Science and Engineering
Table 1 Parameters of the platform and hydraulic winch
Parameter Notation Unit ValueLength of platform 119886 m 25Width of platform 119887 m 10Height of platform 119888 m 1Work depth of platform ℎ m 60Radius of winch capstan 119903 m 0768Reduction ratio of winch 119899 536Servo amplifier gain 119870
1AV 0125
Servo valve gain 1198702
mA 001Servo valve discharge coefficient 119862
119889061
Servo valve area gradient 120596 m 0785Supply pressure of pump 119875
119878Pa 15 times 10
7
Hydraulic oil density 120588 kgm3850
Volumetric displacement ofhydraulic motor 119863
119898mLr 150
Total actuator volume 119881119898
m3147 times 10
minus3
Effective bulk modulus of system 120573119890
Pa 70 times 108
Total leakage coefficient 119862119905119898
m5(Nsdots) 19 times 10minus11
Inertia of hydraulic motor andload 119869
1198980kgsdotm2
1920625
Viscous damping coefficient 1198611198980
Nsdotsm 800
External load torque 1198791198710
Nsdotm 2149254
Table 2 Feedback values of stroke encoder
Number Input(m)
Initial cord length(m)
Final cord length(m)
Error(mm)
1 minus001 0 minus000942 minus0582 minus01 minus000942 minus010951 0093 minus001 minus010951 minus011893 minus0584 01 minus011893 minus000942 9515 minus01 minus000942 minus010951 0096 minus001 0 minus00106 067 minus01 minus00106 minus011068 0088 minus001 minus011068 minus01201 minus0589 minus01 minus01201 minus022019 00910 minus001 minus022019 minus022961 minus058
Figure 7 shows the response of adaptive backsteppingcontroller and Figure 8 shows the response of PID controllerwhich has overshoot and it is inadmissible in the levelingcontrol of platform It is indicated by the simulation resultsthat compared with the conventional PID controller theproposed controller performs better in controlling precisionwith external disturbance and uncertain parameters of theplatform
62 Individual Experiment On the basis of digital simula-tion we take an actual hydraulic winch to do the positionservo control experiment with 15 tons external load usingthe adaptive backstepping controller The equipments ofindividual experiment are shown in Figure 9
The hydraulic winch realizes closed-loop control bystroke encoder With respect to the requirement of highcontrol precision we set the input values as 001m or 01munder the inching mode of hydraulic winch During theexperiment we select any point on the wire rope for strokemeasurement and compare the result with input and theencoder feedback value As a result of the ldquolowest point fixedangle errorrdquo leveling control scheme the precision of wirerope draw-in is the focus of this experiment The encoderfeedback values are shown in Table 2 where the negativeinput signifies wire rope draw-in and the positive inputsignifies wire rope let-out
The results of measurement on wire rope are shown inFigures 10 and 11 where Figure 10 shows the result of wirerope draw-in at 001m and Figure 11 shows the result of wirerope draw-in at 01m
The results of individual experiment indicate that underinching mode of the hydraulic winch the error of wirerope draw-in is within 1mm however the error of wirerope let-out obviously increases because of the overrunningload condition Furthermore the results prove that it isreasonable to ignore the variation of wire rope deformationAs a result of this it can meet the high precision requirementof underwater platform leveling control with the ldquolowestpoint fixed angle errorrdquo leveling control scheme and adaptivebackstepping controller
63 Leveling Control Simulation In this section we carryout the leveling control simulation experiment of underwa-ter platform using the hardware-in-loop simulation systemconnected with actual controller We utilize the ldquolowestpoint fixed angle errorrdquo leveling scheme called ldquochaserdquo toavoid the overrunning load condition of hydraulic winchfor the platform leveling control based on the adaptivebackstepping controller The actual controller and hardware-in-loop system are shown in Figure 12
We set the initial roll (120601) and pitch (120579) angles and surveythe orientation of platform during the leveling control pro-cess The results of hardware-in-loop simulation are shownin Figure 13 where Figure 13(a) shows 120601 gt 0 and 120579 gt 0Figure 13(b) shows 120601 lt 0 and 120579 lt 0 Figure 13(c) shows 120601 lt 0
and 120579 gt 0 and Figure 13(d) shows 120601 gt 0 and 120579 lt 0The results of hardware-in-loop simulation indicate that
the actual controller with adaptive backstepping arithmeticcan effectively overcome uncertain parameters and externaldisturbance of hydraulic system to realize the leveling controlof underwater platform based on ldquolowest point fixed angleerrorrdquo leveling scheme Besides it proves the rationality ofsimulation model
7 Conclusion
This paper presents a new underwater platform based ontension-leg platform We have made simulation and exper-iment using the proposed adaptive backstepping controllerThe results of digital simulation and individual experimentindicate that we can realize high precision position servocontrol of the actuator Then we utilize hardware-in-loop
Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 13
simulation system to do leveling control simulation of theplatform It further proves robustness of the proposed con-troller with uncertain parameters and external load distur-bance of systemHence this work paves the way for the actualleveling control of the platform
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Major Project(Grant no 0261140024) and the National Natural ScienceFoundation (Grant no 51079061)
References
[1] Y J Zhai and J S Ni ldquoThe self-leveling method for six supportshydraulic platform on stationary baserdquo Journal of SoutheastUniversity vol 26 no 2 pp 74ndash80 1996
[2] Y Sheng and Y Y Qiu ldquoAn automatic adjusting algorithmfor the hydraulic platform with six legsrdquo Journal of XidianUniversity vol 29 no 5 pp 593ndash597 2002
[3] Y Sheng and Y Y Qiu ldquoAutomatic leveling system of sixsupports hydraulic platformrdquoHydraulics and Pneumatics no 4pp 26ndash28 1999
[4] K F Ye Study on Leveling Control System With High PrecisionFor platform Bearing Heavy Loads Chongqing University 2004
[5] F Zhang Study on Leveling Control System of High PrecisionPlatform Zhongbei University 2008
[6] S E Landsberger Design And Construction of A cable-Controlled parallel Link manipulator Massachusetts Institute ofTechnology Cambridge Mass USA 1984
[7] S Q Fang D Franitza M Torlo F Bekes and M HillerldquoMotion control of a tendon-based parallel manipulator usingoptimal tension distributionrdquo IEEEASME Transactions onMechatronics vol 9 no 3 pp 561ndash568 2004
[8] M Yamamoto N Yanai and A Mohri ldquoTrajectory controlof incompletely restrained parallel-wire-suspendedmechanismbased on inverse dynamicsrdquo IEEE Transactions on Robotics vol20 no 5 pp 840ndash850 2004
[9] C B Pham S H Yeo G Yang M S Kurbanhusen and I-M Chen ldquoForce-closure workspace analysis of cable-drivenparallel mechanismsrdquoMechanism and Machine Theory vol 41no 1 pp 53ndash69 2006
[10] B Zi Mechanics Analysis and Control Research of the FeedTracking System For Super Antenna Xidian University XirsquoanChina 2007
[11] B Wu S L Wu and K D Zhao ldquoCurrent status and develop-ment tendence of Stewart platform control strategyrdquo MachineTool and Hydraulics vol 10 pp 5ndash7 2005
[12] C Guan and S-A Zhu ldquoMultiple sliding mode robust adaptivecontrol of an electro-hydraulic servo systemrdquo Control Theoryand Applications vol 22 no 6 pp 931ndash938 2005
[13] C Guan and S Pan ldquoAdaptive sliding mode control of electro-hydraulic systemwith nonlinear unknown parametersrdquoControlEngineering Practice vol 16 no 11 pp 1275ndash1284 2008
[14] A Karimi and A Feliachi ldquoDecentralized adaptive backstep-ping control of electric power systemsrdquo Electric Power SystemsResearch vol 78 no 3 pp 484ndash493 2008
[15] S-Y Ruan G-J Li X-H Jiao Y-Z Sun and T T Lie ldquoAdaptivecontrol design for VSC-HVDC systems based on backsteppingmethodrdquo Electric Power Systems Research vol 77 no 5-6 pp559ndash565 2007
[16] C Hua G Feng and X Guan ldquoRobust controller design of aclass of nonlinear time delay systems via backsteppingmethodrdquoAutomatica vol 44 no 2 pp 567ndash573 2008
[17] T I FossenGuidance andControl of OceanVehiclesWiley NewYork NY USA 1994
[18] Q Guo Y Liu and Y Liu ldquoLocal structurization kine-matic decoupling of six-leg virtual-axis NC machine toolrdquoIEEEASME Transactions onMechatronics vol 7 no 4 pp 515ndash518 2002
[19] B Zi B Y Duan J L Du and H Bao ldquoDynamic modeling andactive control of a cable-suspended parallel robotrdquoMechatron-ics vol 18 no 1 pp 1ndash12 2008
[20] B Zi J B Cao and Z C Zhu ldquoDesign dynamics andworkspace of a hybrid-driven-based cable parallelmanipulatorrdquoMathematical Problems in Engineering vol 2013 15 pages 2013
[21] S-R Oh and S K Agrawal ldquoA reference governor-basedcontroller for a cable robot under input constraintsrdquo IEEETransactions on Control Systems Technology vol 13 no 4 pp639ndash645 2005
[22] H E Merritt Hydraulic Control Systems Wiley New York NYUSA 1976
[23] J L Tang Research on Model-Based Adaptive Control of Six-Degree-of-FreedomHydraulic Motion Platform Harbin Instituteof Technology Harbin China 2009
[24] Y-M Fang Y-C Han L-L Zhao and Q Li ldquoAdaptivecontroller for electro-hydraulic servo system with uncertaincoefficients in control inputrdquo Control Theory and Applicationsvol 26 no 2 pp 156ndash160 2009
[25] Y-M Fang Z-X Jiao W-B Wang and P-Z Shao ldquoAdaptivebackstepping sliding mode control for rolling mill hydraulicservo position systemrdquo Electric Machines and Control vol 15no 10 pp 95ndash100 2011
[26] J Ni and L Peng ldquoAn unified modeling on electro hydraulicpoistion servo system and nonlinear controlrdquo in Proceedings ofthe International Conference on Intelligent System Design andEngineeringApplication (ISDEA rsquo10) pp 268ndash272October 2010
[27] G H Xu Z L Zeng and F Xie ldquoDynamic modeling andcontrol of a new underwater loading platformrdquo in Proceedingsof the International Offshore and Polar Engineering vol 2 pp406ndash410 Anchorage Alaska 2013
[28] F G Ding J Wu and Y H Wang ldquoStabilization of an under-actuated surface vessel based on adaptive sliding mode andbackstepping controlrdquo Mathematical Problems in Engineeringvol 2013 Article ID 324954 5 pages 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of




![[5]Klaus Bothe, Zoran Putnik 2nd Delivery of the JCSE as ... · PDF file2nd Delivery of the JCSE as an Intensive Course for Master’s Students at Polytechnic University Tirana: Experience](https://img.pdfslide.us/doc/110x75/5a70be097f8b9aa2538c52ee/5klaus-bothe-zoran-putnik-2nd-delivery-of-the-jcse-as-nbsppdf.jpg)







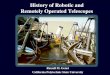



![2014 JCSE ICT Skills Survey - Overviewfilename]_2.pdf · Other SETAs ... this slippage, ranging from limited numbers of matriculants and graduates in the ... 2014 JCSE ICT Skills](https://img.pdfslide.us/doc/110x75/5ab8c6107f8b9ad3038d36ed/2014-jcse-ict-skills-survey-overview-filename2pdfother-setas-this-slippage.jpg)












