Embed Size (px)
Citation preview

Research ArticleA New Formula of Impact Stiffness in Linear Viscoelastic Modelfor Pounding Simulation
Xiuli Xu Xiang Xu Weiqing Liu and Ding Zhou
College of Civil Engineering Nanjing Tech University Nanjing 211816 China
Correspondence should be addressed to Ding Zhou dingzhou57yahoocom
Received 15 May 2016 Revised 8 July 2016 Accepted 14 July 2016
Academic Editor Stefano Sorace
Copyright copy 2016 Xiuli Xu et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The phenomenon of earthquake-induced structural pounding was extensively studied by some researchers using different modelsfor the impact force The aim of this paper is to provide a new formula of impact stiffness in the linear viscoelastic contact modelbased on the assumption that the maximum impact deformation from the distributed mass model should be equal to that fromthe equivalent lumped mass model The correctness and accuracy of the proposed formula have been confirmed by comparing thepounding simulation using the present formula of impact stiffness with those using the existing formulae
1 Introduction
During earthquakes the adjacent structures with differentdynamic characteristics can vibrate out-of-phase whichcould result in pounding if the reserved separation spaceis insufficient to accommodate the relative displacementbetween them This pounding can generate high magnitudeand short duration stress pulse which could lead to seriousdamage or even the collapse of buildings and bridges [1ndash3] Pounding damage was identified in several severe earth-quakes for example the San Fernando earthquake in 1971[4] the Loma Prieta earthquake in 1989 [5] the Northridgeearthquake in 1994 [6] the Kobe earthquake in 1995 [7]and the Taiwan Chi-Chi earthquake in 1999 [8] Thereforeit is valuable to study the collision of structures underearthquakes Several researchers studied the pounding ofadjacent RC structures [9 10] the pounding of adjacentbuildings considering soil-structure interaction [11] and thepounding of bridge deck under bidirectional earthquakeexcitations [12] Licari et al [13] proposed a special ldquomultilinkviscoelasticrdquo finite element model for seismic poundingbetween RC frame buildings which could simulate thenonlinear time-dependent damping coefficients
Structural seismic pounding is a high nonlinear phe-nomenon which involves plastic deformation local crackingor crushing and fracturing as well as friction damage at
the contact area Owing to such complexity performing theexact mathematical analysis is very difficult for this type ofproblem Therefore based on idealizations and assumptionsseveral simplified contact models have been developed tostudy the structural pounding during earthquakes such asthe linear spring model [14] the Hertz model [15] the linearviscoelastic model [16] the Hertz-damp model [17] andthe nonlinear viscoelastic model [18] The disadvantage ofthe linear spring model and the Hertz model is that theyare both of full elasticity so they cannot permit energydissipation during contact occurrence It has been shownthat the other three impact models the linear viscoelasticmodel theHertz-dampmodel and the nonlinear viscoelasticmodel can provide sufficiently accurate results for the overallstructural response if the parameters in these impact modelscould be effectively selected [17]
The linear viscoelastic model has been widely used inthe simulation of structural pounding because it is not onlysimple but also easy to implement in commercial softwareprograms even if it does have some drawbacks an initialjump of the pounding force presents at the beginning ofthe impact and the tensile force could occur before theseparation of two pounding components [17] In order toavoid the tensile impact forces arising during detachmenta variation on the linear viscoelastic model was proposedby Komodromos et al [19] However it still suffers a major
Hindawi Publishing CorporationShock and VibrationVolume 2016 Article ID 5861739 7 pageshttpdxdoiorg10115520165861739
2 Shock and Vibration
limitation the proper value of the impact stiffness to beused in the simulation cannot be known in advance Animpact spring with understiffness could lead to the overlap ofadjacent structures while an impact spring with overstiffnesscould result in unrealistically high impact force and unstablenumerical simulation
Existing studies have demonstrated that impact stiff-ness has a significant influence on the structural poundingresponse especially on the structural acceleration responseand the inertia force response [19ndash21] However the selectionof the impact stiffness in the pounding analysis is a complexissue that could need considering the unknown geometry ofthe impact surfaces the uncertain material properties underimpact load the variable impact velocities and so forthVery limited research has been carried out for the selectionof the impact stiffness Typically the impact stiffness in thelinear viscoelastic model was empirically taken proportionalto the axial stiffness of the colliding structuresThis approachhas been commonly used to select the impact stiffness inthe analysis of structural seismic pounding [17] In generalthe impact stiffness used in the bridge pounding analysis istaken as the axial stiffness of girder [22] while the impactstiffness used in the building pounding analysis is taken asthe axial stiffness of building slab [14] Cole et al [23] deriveda formula to determine the impact stiffness of the linearviscoelastic model based on the assumption of the samedurations from the collision model of distributed mass andthe collision model of equivalent lumped masses Howeverthe effectiveness of Colersquos formula has not been verifiedsufficiently
The purpose of this paper is to derive a new formula ofimpact stiffness for the linear viscoelasticmodel based on theassumption of the samemaximum impact deformations fromthe collision model of distributed masses and the collisionmodel of equivalent lumped masses The effectiveness of thepresent analytical formula is verified through comparisonwith the results of numerical analysis
2 Formula for Impact Stiffness
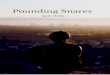
21 The Maximum Impact Deformation from the DistributedMass Model In order to present a better physical under-standing of the structural seismic pounding the distributedmass model has been used to analyze the pounding phe-nomenon based on the one-dimensional wave propagationtheory [23ndash25] The collision of two adjacent componentsduring an earthquake can be simplified as a collision of twodistributed masses as shown in Figure 1
The distributed mass 119894 (119894 = 1 2 resp) has a section 119860119894
a length 119871119894 an elastic modulus 119864
119894 and a mass density 120588
119894
Based on the results of a single distributedmass collidingwitha rigid wall the motion for the collision of two distributedmasses was derived by Cole et al [24] as follows
1199061 (119909 119905) = V
119888119905 + 1205751 (119909 119905)
1199062 (119909 119905) = V
119888119905 + 1205752 (119909 119905)
(1)
1205881 E1 A1 1205882 E2 A2
x1 x210 20
L1 L2
Figure 1 Collision of two distributed masses
in which
1205751 (119909 119905) =
(V10
minus V119888) 1198711
1198621
infin
sum
119899=1
8 (minus1)119899+1
(2119899 minus 1)21205872
sdot cos((2119899 minus 1) 120587
21198711
119909) sin((2119899 minus 1) 120587
21198711
1198621119905)
1205752 (119909 119905) =
(V20
minus V119888) 1198712
1198622
infin
sum
119899=1
8 (minus1)119899+1
(2119899 minus 1)21205872
sdot cos((2119899 minus 1) 120587
21198712
(1198712minus 119909)) sin(
(2119899 minus 1) 120587
21198712
1198622119905)
(2)
where 119906119894(119909 119905) (119894 = 1 2) is the displacement at an arbitrary
point 119909 in the distributed mass 119894 at time 119905 which takes zerovalue at the initial time 119905 = 0 V
1198940is the initial velocity of
the distributed mass 119894 before impact occurrence and V119888is
the intermediate velocity of the collision interface The wavepropagation velocity 119862
119894of the distributed mass 119894 is as follows
119862119894= radic
119864119894
120588119894
119894 = 1 2 (3)
Equations (1) are only valid during the period of contactoccurrence between two distributed masses The term V
119888119905 in
(1) is used to describe the rigid body displacement of eachmass during the collision and the series terms are used todescribe the impact deformation of each mass Namely theimpact displacements in two distributed masses are taken as1205751(119909 119905) and 120575
2(119909 119905) respectively
The natural collision period of the distributed mass 119894 canbe written as follows
119879119894=
2119871119894
119862119894
= 2radic1205881198941198712
119894
119864119894
119894 = 1 2 (4)
When two distributed masses collide the collision durationtakes the smaller one of natural collision periods of two dis-tributedmassesThe reason is that once 119905 reachesmin(119879
1 1198792)
the mass with the shorter period moves away while the othermass internally oscillates because of the incomplete reflectionof the shock wave
Without losing generality we assume 1198791
le 1198792when
the pounding between two distributed masses is studiedTherefore the collision duration is 119879
1 Furthermore when a
collision occurs two compression waves from the collisioninterface will propagate within the distributed masses inopposite directions As the compression waves pass throughthemasses the deformation in eachmass occurs Because thenatural collision period of distributed mass 1 is less than that
Shock and Vibration 3
c
k
m1 m2
10 20
gp
Figure 2 Collision of two equivalent lumped masses
of mass 2 the compression wave is firstly reflected when itreaches the free end of distributed mass 1 At this momentmass 1 presents its maximum compression deformationHowever the compression deformation in mass 2 is 119879
11198792
times the maximum compression deformation itself Thetotal impact deformation is the sum of the deformations inmass 1 and mass 2 When the compression wave reaches thefree end of distributed mass 1 the maximum impact defor-mation is 120575dm which can be obtained from the mathematicalsum of the infinite series in (2) as follows
120575dm =(V10
minus V119888) 1198711
1198621
minus1198791
1198792
sdot(V20
minus V119888) 1198712
1198622
(5)
Substituting (4) into (5) yields the following
120575dm =(V10
minus V20) 1198711
1198621
(6)
22 The Maximum Impact Deformation from the EquivalentLumped Mass Model Two distributed masses given in Fig-ure 1 can be simplified as two equivalent lumped massesduring the analysis of seismic pounding as shown in Figure 2
Thereforemass119898119894in Figure 2 can be expressed as follows
119898119894= 119860119894120588119894119871119894 119894 = 1 2 (7)
The pounding phenomenon between two lumpedmassesas shown in Figure 2 has been analyzed based on the linearviscoelastic model by Anagnostopoulos [26] The contactforce for the linear viscoelastic model can be expressed asfollows
119865119888
=
119896 (1199061minus 1199062minus 119892119901) + 119888 (
1minus 2) 1199061minus 1199062minus 119892119901gt 0
0 1199061minus 1199062minus 119892119901le 0
(8)
where 119906119894(119894 = 1 2) and
119894are the displacements and velocity
of the lumped mass 119894 respectively where the dot denotesthe differentiation with respect to time 119905 119892
119901is the initial
separation distance between two lumped masses 119896 is theimpact stiffness of the linear viscoelastic model and 119888 isthe corresponding impact damping coefficient which can beexpressed by the following formula [26]
119888 = 2120585radic119896(11989811198982
1198981+ 1198982
) 120585 = minusln 119903
radic1205872 + (ln 119903)2
(9)
where 120585 denotes an impact damping ratio correlated withthe restitution coefficient 119903 which accounts for the energydissipation during the pounding
Without loss of generality it is assumed that the begin-ning of the impact occurrence is at 119905 = 0 Therefore we have1199061(0) = 119906
2(0) = 0
1(0) = V
10 and
2(0) = V
20 When
the contact touches off the motion equation of two lumpedmasses are as follows
[
1198981
0
0 1198982
]
1
2
+ [
119888 minus119888
minus119888 119888]
1
2
+ [
119896 minus119896
minus119896 119896]
1199061
1199062
=
0
0
(10)
where 119894(119894 = 1 2) is the acceleration of the lumped mass 119894
Equation (10) can be solved by using the mode superpo-sition method With the initial above-mentioned conditionsthe solutions of the displacements are as follows
1199061 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
1199062 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
(11)
in which
120596 = radic1198981+ 1198982
11989811198982
119896
120596119889= 120596radic1 minus 1205852
(12)
where 120596 is the radial frequency and 120596119889is the damped radial
frequencyThe corresponding velocities are as follows
1 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
2 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
(13)
4 Shock and Vibration
When the maximum deformation occurs during theimpact the relative velocity between two masses should bezero namely
1(119905119898) = 2(119905119898) (14)
where 119905119898
is the time corresponding to the occurrence ofmaximum deformation during the impact
Substituting (13) into (14) the expression for 119905119898can be
obtained as follows
119905119898
=arcsinradic1 minus 1205852
120596119889
(15)
It should be mentioned that 119905119898is always smaller than 120587120596
119889
which is the time when the two lumped masses begin toseparate [26]
Based on (11) and (15) themaximum impact deformation120575lm during the pounding can be obtained as follows
120575lm = 1199061(119905119898) minus 1199062(119905119898)
=V10
minus V20
120596119889
radic1 minus 1205852119890minus120585120596((arcsinradic1minus1205852)120596
119889)
(16)
Substituting (9) and (12) into (16) leads to the following
120575119897119898
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(17)
23 The Formula of Impact Stiffness Real structural seismicpounding can only have a maximum deformation during apounding period However both the distributed mass modelshown in Figure 1 and the lumped mass model shown inFigure 2 can be used to analyze the seismic pounding betweenthe adjacent structures The maximum impact deformationfrom the distributed mass model is equal to that from theequivalent lumped mass model namely
120575dm = 120575lm (18)
Substituting (6) and (17) into (18) leads to the following
(V10
minus V20) 1198711
1198621
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(19)
Solving the above equation for 119896 yields the following
119896 =119898111989821198622
1
(1198981+ 1198982) 1198712
1
119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(20)
The axial stiffness of the distributed mass 119894 given in Figure 1can be expressed as follows
119896119886119894
=119864119894119860119894
119871119894
119894 = 1 2 (21)
Substituting (3) (7) and (21) into (20) yields the following
119896 =1198982
1198981+ 1198982
1198961198861119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(22)
It should be mentioned that formula (22) is valid only when1198791
le 1198792 When 119879
1gt 1198792 a similar formula can be obtained
by taking 1198981 1198982 and 119896
1198862instead of 119898
2 1198981 and 119896
1198861in (22)
respectively
3 Numerical Verification
During the derivation of the formula for impact stiffnesssome assumptions have been set Therefore it is necessaryto verify the correctness and the accuracy of the proposedformula (22) The values of impact stiffness from the presentformula have been compared with those determined by othermethods Furthermore the precision of the present formulais verified through numerical simulations for poundingresponse
The comparison study among three kinds of methods forimpact stiffness has been conducted that is taking the impactstiffness follows respectively the axial stiffness formula (see(21)) the present formula (see (22)) andColersquos formulawhichis expressed as follows [23]
119896 =(11989811198982 (1198981+ 1198982)) (120587119879
1)2
1 minus ((minus ln 119903) radic1205872 + (ln 119903)2)
2 (23)
Moreover the effect of different parametric values such as themass ratio of two impact bodies and the restitution coefficienton impact stiffness has been investigated We take the impactbetween two simplified concrete bodies as an example Thefollowing parameters in the analysis have been used 120588
1= 1205882
= 26 times 103 kgm3 1198641= 1198642= 345 times 1010 Pa 119860
1= 1198602= 4m2
and 1198711= 40m and the mass ratio of two bodies (119898
1le 1198982)
is taken as follows
120573 =1198982
1198981
(24)
In the case of constant mass ratio 120573 = 2 the restitutioncoefficient 119903 ranged from 03 to 1 with an increment of 001Moreover in the case of fixed restitution coefficient 119903 = 065the mass ratio 120573 has been set from 1 to 5 with an incrementof 005 (the change of the mass ratio results from the lengthvariation of body 2 in Figure 1) The values of the impactstiffness from three kinds of methods are normalized asfollows
120583 =119896
1198961198861
(25)
where 120583 is the stiffness ratio relative to the axial stiffness ofimpact body 1
The comparisons of results from three kinds of methodsfor impact stiffness are presented in Figures 3 and 4 respec-tively It can be seen fromboth figures that the impact stiffnesscalculated by the present formula (see (22)) is obviouslydifferent from those determined by the other two methods
Shock and Vibration 5
03 04 05 06 07 08 09 100
02
04
06
08
10
12
14
16
18
20
Stiff
ness
ratio
120583
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 3 The impact stiffness from three kinds of methods withrespect to different restitution coefficients
10 15 20 25 30 35 40 45 500
0204060810121416182022
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Stiff
ness
ratio
120583
Figure 4 The impact stiffness from three kinds of methods withrespect to different mass ratios
Moreover it can be seen from Figure 3 that the impactstiffness given by the proposed formula is much smaller thanthose from Colersquos formula (see (23)) and the axial stiffnessformula (see (21)) at the level of restitution coefficient 119903
varying from 03 to 1 Similarly this trend has been observedin Figure 4 where the values given by the proposed formulaare much smaller than those given by Colersquos formula and theaxial stiffness formula Guo et al [27 28] and Wang et al[29] commented that for the seismic pounding of a bridgethe impact stiffness obtained from experiment is significantlysmaller than that from theoretical analysis Khatiwada et al[30] studied five different impact force models and carriedout shake table tests for pounding between two steel portal
frames It was found that the Hertz-damp model alwaysoverestimated the responses while the other four models alsofrequently overestimated the amplificationsThus the predic-tions from the four models were not significantly differentSince the linear viscoelastic model requires substantiallyless computation this model is more suitable for numericalmodelling of pounding responses compared with the othermodels It is seen from Figures 3 and 4 that the impactstiffness from the present formula is just lower than that fromthe axial stiffness formula and greatly lower than that fromColersquos formula Furthermore it can be seen from Figures 3and 4 that both restitution coefficient and mass ratio havea significant influence on the impact stiffness described bythe proposed formulaThe impact stiffness increases with theincrease of restitution coefficient or mass rate
In order to verify the accuracy of the proposed for-mula for impact stiffness a comparison of the maximumimpact forces from pounding simulations using the linearviscoelastic model has been made In the numerical analysisthe impact stiffness determined by three kinds of methodsrespectively was used and the same model parameters asgiven above were taken In the case of mass ratio 120573 = 2 andthe initial relative velocity V
10minus V20
= 2ms the coefficientof restitution r ranged from 04 to 1 with an increment of 01In the case of mass ratio 120573 = 2 and the restitution coefficient119903 = 065 the initial relative velocity (V
10minusV20) was taken from
1ms to 5ms with an increment of 1ms In the case of therestitution coefficient 119903 = 065 and the initial relative velocityV10
minus V20
= 2ms the mass ratio 120573 varies from 1 to 5 with anincrement of 1 The fourth-order Runge-Kutta method withthe constant time step Δ119905 = 00001 s was applied in thenumerical computations The referenced maximum impactforce 119865
119905max used for comparison comes from the followingformula [18 19]
119865119905max =
V10
minus V20
1radic11989811198961198861
+ 1radic11989821198961198862
(26)
The relative error of the maximum impact force from thenumerical simulations was assessed by the following
120578 =
1003816100381610038161003816119865max minus 119865119905max
1003816100381610038161003816
119865119905max
times 100 (27)
where 120578 is the relative error 119865max is the maximum impactforce from the numerical simulations
The drift envelopes of the relative errors of maximumimpact forces from numerical simulations based on thelinear viscoelastic model with respect to impact stiffnessgiven by three kinds of methods are presented in Figures5 6 and 7 It can be seen from Figures 5ndash7 that the linearviscoelastic model with the impact stiffness coming from theproposed formula (see (22)) gives the least relative errors onthe average meaning compared to the results based on theimpact stiffness given by Colersquos formula (see (23)) and thatgiven by the axial stiffness formula (see (21)) Therefore itmay be inferred that the linear viscoelastic model using theimpact stiffness given by the proposed formula could providea more precise simulation to the structural pounding thanthose given by the other two formulae
6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
limitation the proper value of the impact stiffness to beused in the simulation cannot be known in advance Animpact spring with understiffness could lead to the overlap ofadjacent structures while an impact spring with overstiffnesscould result in unrealistically high impact force and unstablenumerical simulation
Existing studies have demonstrated that impact stiff-ness has a significant influence on the structural poundingresponse especially on the structural acceleration responseand the inertia force response [19ndash21] However the selectionof the impact stiffness in the pounding analysis is a complexissue that could need considering the unknown geometry ofthe impact surfaces the uncertain material properties underimpact load the variable impact velocities and so forthVery limited research has been carried out for the selectionof the impact stiffness Typically the impact stiffness in thelinear viscoelastic model was empirically taken proportionalto the axial stiffness of the colliding structuresThis approachhas been commonly used to select the impact stiffness inthe analysis of structural seismic pounding [17] In generalthe impact stiffness used in the bridge pounding analysis istaken as the axial stiffness of girder [22] while the impactstiffness used in the building pounding analysis is taken asthe axial stiffness of building slab [14] Cole et al [23] deriveda formula to determine the impact stiffness of the linearviscoelastic model based on the assumption of the samedurations from the collision model of distributed mass andthe collision model of equivalent lumped masses Howeverthe effectiveness of Colersquos formula has not been verifiedsufficiently
The purpose of this paper is to derive a new formula ofimpact stiffness for the linear viscoelasticmodel based on theassumption of the samemaximum impact deformations fromthe collision model of distributed masses and the collisionmodel of equivalent lumped masses The effectiveness of thepresent analytical formula is verified through comparisonwith the results of numerical analysis
2 Formula for Impact Stiffness
21 The Maximum Impact Deformation from the DistributedMass Model In order to present a better physical under-standing of the structural seismic pounding the distributedmass model has been used to analyze the pounding phe-nomenon based on the one-dimensional wave propagationtheory [23ndash25] The collision of two adjacent componentsduring an earthquake can be simplified as a collision of twodistributed masses as shown in Figure 1
The distributed mass 119894 (119894 = 1 2 resp) has a section 119860119894
a length 119871119894 an elastic modulus 119864
119894 and a mass density 120588
119894
Based on the results of a single distributedmass collidingwitha rigid wall the motion for the collision of two distributedmasses was derived by Cole et al [24] as follows
1199061 (119909 119905) = V
119888119905 + 1205751 (119909 119905)
1199062 (119909 119905) = V
119888119905 + 1205752 (119909 119905)
(1)
1205881 E1 A1 1205882 E2 A2
x1 x210 20
L1 L2
Figure 1 Collision of two distributed masses
in which
1205751 (119909 119905) =
(V10
minus V119888) 1198711
1198621
infin
sum
119899=1
8 (minus1)119899+1
(2119899 minus 1)21205872
sdot cos((2119899 minus 1) 120587
21198711
119909) sin((2119899 minus 1) 120587
21198711
1198621119905)
1205752 (119909 119905) =
(V20
minus V119888) 1198712
1198622
infin
sum
119899=1
8 (minus1)119899+1
(2119899 minus 1)21205872
sdot cos((2119899 minus 1) 120587
21198712
(1198712minus 119909)) sin(
(2119899 minus 1) 120587
21198712
1198622119905)
(2)
where 119906119894(119909 119905) (119894 = 1 2) is the displacement at an arbitrary
point 119909 in the distributed mass 119894 at time 119905 which takes zerovalue at the initial time 119905 = 0 V
1198940is the initial velocity of
the distributed mass 119894 before impact occurrence and V119888is
the intermediate velocity of the collision interface The wavepropagation velocity 119862
119894of the distributed mass 119894 is as follows
119862119894= radic
119864119894
120588119894
119894 = 1 2 (3)
Equations (1) are only valid during the period of contactoccurrence between two distributed masses The term V
119888119905 in
(1) is used to describe the rigid body displacement of eachmass during the collision and the series terms are used todescribe the impact deformation of each mass Namely theimpact displacements in two distributed masses are taken as1205751(119909 119905) and 120575
2(119909 119905) respectively
The natural collision period of the distributed mass 119894 canbe written as follows
119879119894=
2119871119894
119862119894
= 2radic1205881198941198712
119894
119864119894
119894 = 1 2 (4)
When two distributed masses collide the collision durationtakes the smaller one of natural collision periods of two dis-tributedmassesThe reason is that once 119905 reachesmin(119879
1 1198792)
the mass with the shorter period moves away while the othermass internally oscillates because of the incomplete reflectionof the shock wave
Without losing generality we assume 1198791
le 1198792when
the pounding between two distributed masses is studiedTherefore the collision duration is 119879
1 Furthermore when a
collision occurs two compression waves from the collisioninterface will propagate within the distributed masses inopposite directions As the compression waves pass throughthemasses the deformation in eachmass occurs Because thenatural collision period of distributed mass 1 is less than that
Shock and Vibration 3
c
k
m1 m2
10 20
gp
Figure 2 Collision of two equivalent lumped masses
of mass 2 the compression wave is firstly reflected when itreaches the free end of distributed mass 1 At this momentmass 1 presents its maximum compression deformationHowever the compression deformation in mass 2 is 119879
11198792
times the maximum compression deformation itself Thetotal impact deformation is the sum of the deformations inmass 1 and mass 2 When the compression wave reaches thefree end of distributed mass 1 the maximum impact defor-mation is 120575dm which can be obtained from the mathematicalsum of the infinite series in (2) as follows
120575dm =(V10
minus V119888) 1198711
1198621
minus1198791
1198792
sdot(V20
minus V119888) 1198712
1198622
(5)
Substituting (4) into (5) yields the following
120575dm =(V10
minus V20) 1198711
1198621
(6)
22 The Maximum Impact Deformation from the EquivalentLumped Mass Model Two distributed masses given in Fig-ure 1 can be simplified as two equivalent lumped massesduring the analysis of seismic pounding as shown in Figure 2
Thereforemass119898119894in Figure 2 can be expressed as follows
119898119894= 119860119894120588119894119871119894 119894 = 1 2 (7)
The pounding phenomenon between two lumpedmassesas shown in Figure 2 has been analyzed based on the linearviscoelastic model by Anagnostopoulos [26] The contactforce for the linear viscoelastic model can be expressed asfollows
119865119888
=
119896 (1199061minus 1199062minus 119892119901) + 119888 (
1minus 2) 1199061minus 1199062minus 119892119901gt 0
0 1199061minus 1199062minus 119892119901le 0
(8)
where 119906119894(119894 = 1 2) and
119894are the displacements and velocity
of the lumped mass 119894 respectively where the dot denotesthe differentiation with respect to time 119905 119892
119901is the initial
separation distance between two lumped masses 119896 is theimpact stiffness of the linear viscoelastic model and 119888 isthe corresponding impact damping coefficient which can beexpressed by the following formula [26]
119888 = 2120585radic119896(11989811198982
1198981+ 1198982
) 120585 = minusln 119903
radic1205872 + (ln 119903)2
(9)
where 120585 denotes an impact damping ratio correlated withthe restitution coefficient 119903 which accounts for the energydissipation during the pounding
Without loss of generality it is assumed that the begin-ning of the impact occurrence is at 119905 = 0 Therefore we have1199061(0) = 119906
2(0) = 0
1(0) = V
10 and
2(0) = V
20 When
the contact touches off the motion equation of two lumpedmasses are as follows
[
1198981
0
0 1198982
]
1
2
+ [
119888 minus119888
minus119888 119888]
1
2
+ [
119896 minus119896
minus119896 119896]
1199061
1199062
=
0
0
(10)
where 119894(119894 = 1 2) is the acceleration of the lumped mass 119894
Equation (10) can be solved by using the mode superpo-sition method With the initial above-mentioned conditionsthe solutions of the displacements are as follows
1199061 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
1199062 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
(11)
in which
120596 = radic1198981+ 1198982
11989811198982
119896
120596119889= 120596radic1 minus 1205852
(12)
where 120596 is the radial frequency and 120596119889is the damped radial
frequencyThe corresponding velocities are as follows
1 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
2 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
(13)
4 Shock and Vibration
When the maximum deformation occurs during theimpact the relative velocity between two masses should bezero namely
1(119905119898) = 2(119905119898) (14)
where 119905119898
is the time corresponding to the occurrence ofmaximum deformation during the impact
Substituting (13) into (14) the expression for 119905119898can be
obtained as follows
119905119898
=arcsinradic1 minus 1205852
120596119889
(15)
It should be mentioned that 119905119898is always smaller than 120587120596
119889
which is the time when the two lumped masses begin toseparate [26]
Based on (11) and (15) themaximum impact deformation120575lm during the pounding can be obtained as follows
120575lm = 1199061(119905119898) minus 1199062(119905119898)
=V10
minus V20
120596119889
radic1 minus 1205852119890minus120585120596((arcsinradic1minus1205852)120596
119889)
(16)
Substituting (9) and (12) into (16) leads to the following
120575119897119898
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(17)
23 The Formula of Impact Stiffness Real structural seismicpounding can only have a maximum deformation during apounding period However both the distributed mass modelshown in Figure 1 and the lumped mass model shown inFigure 2 can be used to analyze the seismic pounding betweenthe adjacent structures The maximum impact deformationfrom the distributed mass model is equal to that from theequivalent lumped mass model namely
120575dm = 120575lm (18)
Substituting (6) and (17) into (18) leads to the following
(V10
minus V20) 1198711
1198621
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(19)
Solving the above equation for 119896 yields the following
119896 =119898111989821198622
1
(1198981+ 1198982) 1198712
1
119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(20)
The axial stiffness of the distributed mass 119894 given in Figure 1can be expressed as follows
119896119886119894
=119864119894119860119894
119871119894
119894 = 1 2 (21)
Substituting (3) (7) and (21) into (20) yields the following
119896 =1198982
1198981+ 1198982
1198961198861119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(22)
It should be mentioned that formula (22) is valid only when1198791
le 1198792 When 119879
1gt 1198792 a similar formula can be obtained
by taking 1198981 1198982 and 119896
1198862instead of 119898
2 1198981 and 119896
1198861in (22)
respectively
3 Numerical Verification
During the derivation of the formula for impact stiffnesssome assumptions have been set Therefore it is necessaryto verify the correctness and the accuracy of the proposedformula (22) The values of impact stiffness from the presentformula have been compared with those determined by othermethods Furthermore the precision of the present formulais verified through numerical simulations for poundingresponse
The comparison study among three kinds of methods forimpact stiffness has been conducted that is taking the impactstiffness follows respectively the axial stiffness formula (see(21)) the present formula (see (22)) andColersquos formulawhichis expressed as follows [23]
119896 =(11989811198982 (1198981+ 1198982)) (120587119879
1)2
1 minus ((minus ln 119903) radic1205872 + (ln 119903)2)
2 (23)
Moreover the effect of different parametric values such as themass ratio of two impact bodies and the restitution coefficienton impact stiffness has been investigated We take the impactbetween two simplified concrete bodies as an example Thefollowing parameters in the analysis have been used 120588
1= 1205882
= 26 times 103 kgm3 1198641= 1198642= 345 times 1010 Pa 119860
1= 1198602= 4m2
and 1198711= 40m and the mass ratio of two bodies (119898
1le 1198982)
is taken as follows
120573 =1198982
1198981
(24)
In the case of constant mass ratio 120573 = 2 the restitutioncoefficient 119903 ranged from 03 to 1 with an increment of 001Moreover in the case of fixed restitution coefficient 119903 = 065the mass ratio 120573 has been set from 1 to 5 with an incrementof 005 (the change of the mass ratio results from the lengthvariation of body 2 in Figure 1) The values of the impactstiffness from three kinds of methods are normalized asfollows
120583 =119896
1198961198861
(25)
where 120583 is the stiffness ratio relative to the axial stiffness ofimpact body 1
The comparisons of results from three kinds of methodsfor impact stiffness are presented in Figures 3 and 4 respec-tively It can be seen fromboth figures that the impact stiffnesscalculated by the present formula (see (22)) is obviouslydifferent from those determined by the other two methods
Shock and Vibration 5
03 04 05 06 07 08 09 100
02
04
06
08
10
12
14
16
18
20
Stiff
ness
ratio
120583
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 3 The impact stiffness from three kinds of methods withrespect to different restitution coefficients
10 15 20 25 30 35 40 45 500
0204060810121416182022
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Stiff
ness
ratio
120583
Figure 4 The impact stiffness from three kinds of methods withrespect to different mass ratios
Moreover it can be seen from Figure 3 that the impactstiffness given by the proposed formula is much smaller thanthose from Colersquos formula (see (23)) and the axial stiffnessformula (see (21)) at the level of restitution coefficient 119903
varying from 03 to 1 Similarly this trend has been observedin Figure 4 where the values given by the proposed formulaare much smaller than those given by Colersquos formula and theaxial stiffness formula Guo et al [27 28] and Wang et al[29] commented that for the seismic pounding of a bridgethe impact stiffness obtained from experiment is significantlysmaller than that from theoretical analysis Khatiwada et al[30] studied five different impact force models and carriedout shake table tests for pounding between two steel portal
frames It was found that the Hertz-damp model alwaysoverestimated the responses while the other four models alsofrequently overestimated the amplificationsThus the predic-tions from the four models were not significantly differentSince the linear viscoelastic model requires substantiallyless computation this model is more suitable for numericalmodelling of pounding responses compared with the othermodels It is seen from Figures 3 and 4 that the impactstiffness from the present formula is just lower than that fromthe axial stiffness formula and greatly lower than that fromColersquos formula Furthermore it can be seen from Figures 3and 4 that both restitution coefficient and mass ratio havea significant influence on the impact stiffness described bythe proposed formulaThe impact stiffness increases with theincrease of restitution coefficient or mass rate
In order to verify the accuracy of the proposed for-mula for impact stiffness a comparison of the maximumimpact forces from pounding simulations using the linearviscoelastic model has been made In the numerical analysisthe impact stiffness determined by three kinds of methodsrespectively was used and the same model parameters asgiven above were taken In the case of mass ratio 120573 = 2 andthe initial relative velocity V
10minus V20
= 2ms the coefficientof restitution r ranged from 04 to 1 with an increment of 01In the case of mass ratio 120573 = 2 and the restitution coefficient119903 = 065 the initial relative velocity (V
10minusV20) was taken from
1ms to 5ms with an increment of 1ms In the case of therestitution coefficient 119903 = 065 and the initial relative velocityV10
minus V20
= 2ms the mass ratio 120573 varies from 1 to 5 with anincrement of 1 The fourth-order Runge-Kutta method withthe constant time step Δ119905 = 00001 s was applied in thenumerical computations The referenced maximum impactforce 119865
119905max used for comparison comes from the followingformula [18 19]
119865119905max =
V10
minus V20
1radic11989811198961198861
+ 1radic11989821198961198862
(26)
The relative error of the maximum impact force from thenumerical simulations was assessed by the following
120578 =
1003816100381610038161003816119865max minus 119865119905max
1003816100381610038161003816
119865119905max
times 100 (27)
where 120578 is the relative error 119865max is the maximum impactforce from the numerical simulations
The drift envelopes of the relative errors of maximumimpact forces from numerical simulations based on thelinear viscoelastic model with respect to impact stiffnessgiven by three kinds of methods are presented in Figures5 6 and 7 It can be seen from Figures 5ndash7 that the linearviscoelastic model with the impact stiffness coming from theproposed formula (see (22)) gives the least relative errors onthe average meaning compared to the results based on theimpact stiffness given by Colersquos formula (see (23)) and thatgiven by the axial stiffness formula (see (21)) Therefore itmay be inferred that the linear viscoelastic model using theimpact stiffness given by the proposed formula could providea more precise simulation to the structural pounding thanthose given by the other two formulae
6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
c
k
m1 m2
10 20
gp
Figure 2 Collision of two equivalent lumped masses
of mass 2 the compression wave is firstly reflected when itreaches the free end of distributed mass 1 At this momentmass 1 presents its maximum compression deformationHowever the compression deformation in mass 2 is 119879
11198792
times the maximum compression deformation itself Thetotal impact deformation is the sum of the deformations inmass 1 and mass 2 When the compression wave reaches thefree end of distributed mass 1 the maximum impact defor-mation is 120575dm which can be obtained from the mathematicalsum of the infinite series in (2) as follows
120575dm =(V10
minus V119888) 1198711
1198621
minus1198791
1198792
sdot(V20
minus V119888) 1198712
1198622
(5)
Substituting (4) into (5) yields the following
120575dm =(V10
minus V20) 1198711
1198621
(6)
22 The Maximum Impact Deformation from the EquivalentLumped Mass Model Two distributed masses given in Fig-ure 1 can be simplified as two equivalent lumped massesduring the analysis of seismic pounding as shown in Figure 2
Thereforemass119898119894in Figure 2 can be expressed as follows
119898119894= 119860119894120588119894119871119894 119894 = 1 2 (7)
The pounding phenomenon between two lumpedmassesas shown in Figure 2 has been analyzed based on the linearviscoelastic model by Anagnostopoulos [26] The contactforce for the linear viscoelastic model can be expressed asfollows
119865119888
=
119896 (1199061minus 1199062minus 119892119901) + 119888 (
1minus 2) 1199061minus 1199062minus 119892119901gt 0
0 1199061minus 1199062minus 119892119901le 0
(8)
where 119906119894(119894 = 1 2) and
119894are the displacements and velocity
of the lumped mass 119894 respectively where the dot denotesthe differentiation with respect to time 119905 119892
119901is the initial
separation distance between two lumped masses 119896 is theimpact stiffness of the linear viscoelastic model and 119888 isthe corresponding impact damping coefficient which can beexpressed by the following formula [26]
119888 = 2120585radic119896(11989811198982
1198981+ 1198982
) 120585 = minusln 119903
radic1205872 + (ln 119903)2
(9)
where 120585 denotes an impact damping ratio correlated withthe restitution coefficient 119903 which accounts for the energydissipation during the pounding
Without loss of generality it is assumed that the begin-ning of the impact occurrence is at 119905 = 0 Therefore we have1199061(0) = 119906
2(0) = 0
1(0) = V
10 and
2(0) = V
20 When
the contact touches off the motion equation of two lumpedmasses are as follows
[
1198981
0
0 1198982
]
1
2
+ [
119888 minus119888
minus119888 119888]
1
2
+ [
119896 minus119896
minus119896 119896]
1199061
1199062
=
0
0
(10)
where 119894(119894 = 1 2) is the acceleration of the lumped mass 119894
Equation (10) can be solved by using the mode superpo-sition method With the initial above-mentioned conditionsthe solutions of the displacements are as follows
1199061 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
1199062 (119905) =
1198981V10
+ 1198982V20
1198981+ 1198982
119905
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905 sin120596
119889119905
(11)
in which
120596 = radic1198981+ 1198982
11989811198982
119896
120596119889= 120596radic1 minus 1205852
(12)
where 120596 is the radial frequency and 120596119889is the damped radial
frequencyThe corresponding velocities are as follows
1 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
+(V10
minus V20)1198982
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
2 (119905)
=1198981V10
+ 1198982V20
1198981+ 1198982
minus(V10
minus V20)1198981
(1198981+ 1198982) 120596119889
119890minus120585120596119905
(120596119889cos120596119889119905 minus 120585120596 sin120596
119889119905)
(13)
4 Shock and Vibration
When the maximum deformation occurs during theimpact the relative velocity between two masses should bezero namely
1(119905119898) = 2(119905119898) (14)
where 119905119898
is the time corresponding to the occurrence ofmaximum deformation during the impact
Substituting (13) into (14) the expression for 119905119898can be
obtained as follows
119905119898
=arcsinradic1 minus 1205852
120596119889
(15)
It should be mentioned that 119905119898is always smaller than 120587120596
119889
which is the time when the two lumped masses begin toseparate [26]
Based on (11) and (15) themaximum impact deformation120575lm during the pounding can be obtained as follows
120575lm = 1199061(119905119898) minus 1199062(119905119898)
=V10
minus V20
120596119889
radic1 minus 1205852119890minus120585120596((arcsinradic1minus1205852)120596
119889)
(16)
Substituting (9) and (12) into (16) leads to the following
120575119897119898
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(17)
23 The Formula of Impact Stiffness Real structural seismicpounding can only have a maximum deformation during apounding period However both the distributed mass modelshown in Figure 1 and the lumped mass model shown inFigure 2 can be used to analyze the seismic pounding betweenthe adjacent structures The maximum impact deformationfrom the distributed mass model is equal to that from theequivalent lumped mass model namely
120575dm = 120575lm (18)
Substituting (6) and (17) into (18) leads to the following
(V10
minus V20) 1198711
1198621
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(19)
Solving the above equation for 119896 yields the following
119896 =119898111989821198622
1
(1198981+ 1198982) 1198712
1
119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(20)
The axial stiffness of the distributed mass 119894 given in Figure 1can be expressed as follows
119896119886119894
=119864119894119860119894
119871119894
119894 = 1 2 (21)
Substituting (3) (7) and (21) into (20) yields the following
119896 =1198982
1198981+ 1198982
1198961198861119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(22)
It should be mentioned that formula (22) is valid only when1198791
le 1198792 When 119879
1gt 1198792 a similar formula can be obtained
by taking 1198981 1198982 and 119896
1198862instead of 119898
2 1198981 and 119896
1198861in (22)
respectively
3 Numerical Verification
During the derivation of the formula for impact stiffnesssome assumptions have been set Therefore it is necessaryto verify the correctness and the accuracy of the proposedformula (22) The values of impact stiffness from the presentformula have been compared with those determined by othermethods Furthermore the precision of the present formulais verified through numerical simulations for poundingresponse
The comparison study among three kinds of methods forimpact stiffness has been conducted that is taking the impactstiffness follows respectively the axial stiffness formula (see(21)) the present formula (see (22)) andColersquos formulawhichis expressed as follows [23]
119896 =(11989811198982 (1198981+ 1198982)) (120587119879
1)2
1 minus ((minus ln 119903) radic1205872 + (ln 119903)2)
2 (23)
Moreover the effect of different parametric values such as themass ratio of two impact bodies and the restitution coefficienton impact stiffness has been investigated We take the impactbetween two simplified concrete bodies as an example Thefollowing parameters in the analysis have been used 120588
1= 1205882
= 26 times 103 kgm3 1198641= 1198642= 345 times 1010 Pa 119860
1= 1198602= 4m2
and 1198711= 40m and the mass ratio of two bodies (119898
1le 1198982)
is taken as follows
120573 =1198982
1198981
(24)
In the case of constant mass ratio 120573 = 2 the restitutioncoefficient 119903 ranged from 03 to 1 with an increment of 001Moreover in the case of fixed restitution coefficient 119903 = 065the mass ratio 120573 has been set from 1 to 5 with an incrementof 005 (the change of the mass ratio results from the lengthvariation of body 2 in Figure 1) The values of the impactstiffness from three kinds of methods are normalized asfollows
120583 =119896
1198961198861
(25)
where 120583 is the stiffness ratio relative to the axial stiffness ofimpact body 1
The comparisons of results from three kinds of methodsfor impact stiffness are presented in Figures 3 and 4 respec-tively It can be seen fromboth figures that the impact stiffnesscalculated by the present formula (see (22)) is obviouslydifferent from those determined by the other two methods
Shock and Vibration 5
03 04 05 06 07 08 09 100
02
04
06
08
10
12
14
16
18
20
Stiff
ness
ratio
120583
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 3 The impact stiffness from three kinds of methods withrespect to different restitution coefficients
10 15 20 25 30 35 40 45 500
0204060810121416182022
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Stiff
ness
ratio
120583
Figure 4 The impact stiffness from three kinds of methods withrespect to different mass ratios
Moreover it can be seen from Figure 3 that the impactstiffness given by the proposed formula is much smaller thanthose from Colersquos formula (see (23)) and the axial stiffnessformula (see (21)) at the level of restitution coefficient 119903
varying from 03 to 1 Similarly this trend has been observedin Figure 4 where the values given by the proposed formulaare much smaller than those given by Colersquos formula and theaxial stiffness formula Guo et al [27 28] and Wang et al[29] commented that for the seismic pounding of a bridgethe impact stiffness obtained from experiment is significantlysmaller than that from theoretical analysis Khatiwada et al[30] studied five different impact force models and carriedout shake table tests for pounding between two steel portal
frames It was found that the Hertz-damp model alwaysoverestimated the responses while the other four models alsofrequently overestimated the amplificationsThus the predic-tions from the four models were not significantly differentSince the linear viscoelastic model requires substantiallyless computation this model is more suitable for numericalmodelling of pounding responses compared with the othermodels It is seen from Figures 3 and 4 that the impactstiffness from the present formula is just lower than that fromthe axial stiffness formula and greatly lower than that fromColersquos formula Furthermore it can be seen from Figures 3and 4 that both restitution coefficient and mass ratio havea significant influence on the impact stiffness described bythe proposed formulaThe impact stiffness increases with theincrease of restitution coefficient or mass rate
In order to verify the accuracy of the proposed for-mula for impact stiffness a comparison of the maximumimpact forces from pounding simulations using the linearviscoelastic model has been made In the numerical analysisthe impact stiffness determined by three kinds of methodsrespectively was used and the same model parameters asgiven above were taken In the case of mass ratio 120573 = 2 andthe initial relative velocity V
10minus V20
= 2ms the coefficientof restitution r ranged from 04 to 1 with an increment of 01In the case of mass ratio 120573 = 2 and the restitution coefficient119903 = 065 the initial relative velocity (V
10minusV20) was taken from
1ms to 5ms with an increment of 1ms In the case of therestitution coefficient 119903 = 065 and the initial relative velocityV10
minus V20
= 2ms the mass ratio 120573 varies from 1 to 5 with anincrement of 1 The fourth-order Runge-Kutta method withthe constant time step Δ119905 = 00001 s was applied in thenumerical computations The referenced maximum impactforce 119865
119905max used for comparison comes from the followingformula [18 19]
119865119905max =
V10
minus V20
1radic11989811198961198861
+ 1radic11989821198961198862
(26)
The relative error of the maximum impact force from thenumerical simulations was assessed by the following
120578 =
1003816100381610038161003816119865max minus 119865119905max
1003816100381610038161003816
119865119905max
times 100 (27)
where 120578 is the relative error 119865max is the maximum impactforce from the numerical simulations
The drift envelopes of the relative errors of maximumimpact forces from numerical simulations based on thelinear viscoelastic model with respect to impact stiffnessgiven by three kinds of methods are presented in Figures5 6 and 7 It can be seen from Figures 5ndash7 that the linearviscoelastic model with the impact stiffness coming from theproposed formula (see (22)) gives the least relative errors onthe average meaning compared to the results based on theimpact stiffness given by Colersquos formula (see (23)) and thatgiven by the axial stiffness formula (see (21)) Therefore itmay be inferred that the linear viscoelastic model using theimpact stiffness given by the proposed formula could providea more precise simulation to the structural pounding thanthose given by the other two formulae
6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
When the maximum deformation occurs during theimpact the relative velocity between two masses should bezero namely
1(119905119898) = 2(119905119898) (14)
where 119905119898
is the time corresponding to the occurrence ofmaximum deformation during the impact
Substituting (13) into (14) the expression for 119905119898can be
obtained as follows
119905119898
=arcsinradic1 minus 1205852
120596119889
(15)
It should be mentioned that 119905119898is always smaller than 120587120596
119889
which is the time when the two lumped masses begin toseparate [26]
Based on (11) and (15) themaximum impact deformation120575lm during the pounding can be obtained as follows
120575lm = 1199061(119905119898) minus 1199062(119905119898)
=V10
minus V20
120596119889
radic1 minus 1205852119890minus120585120596((arcsinradic1minus1205852)120596
119889)
(16)
Substituting (9) and (12) into (16) leads to the following
120575119897119898
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(17)
23 The Formula of Impact Stiffness Real structural seismicpounding can only have a maximum deformation during apounding period However both the distributed mass modelshown in Figure 1 and the lumped mass model shown inFigure 2 can be used to analyze the seismic pounding betweenthe adjacent structures The maximum impact deformationfrom the distributed mass model is equal to that from theequivalent lumped mass model namely
120575dm = 120575lm (18)
Substituting (6) and (17) into (18) leads to the following
(V10
minus V20) 1198711
1198621
= radic11989811198982
(1198981+ 1198982) 119896
(V10
minus V20)
sdot 119890((ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(19)
Solving the above equation for 119896 yields the following
119896 =119898111989821198622
1
(1198981+ 1198982) 1198712
1
119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(20)
The axial stiffness of the distributed mass 119894 given in Figure 1can be expressed as follows
119896119886119894
=119864119894119860119894
119871119894
119894 = 1 2 (21)
Substituting (3) (7) and (21) into (20) yields the following
119896 =1198982
1198981+ 1198982
1198961198861119890((2 ln 119903)120587) arcsin(120587radic1205872+(ln 119903)2)
(22)
It should be mentioned that formula (22) is valid only when1198791
le 1198792 When 119879
1gt 1198792 a similar formula can be obtained
by taking 1198981 1198982 and 119896
1198862instead of 119898
2 1198981 and 119896
1198861in (22)
respectively
3 Numerical Verification
During the derivation of the formula for impact stiffnesssome assumptions have been set Therefore it is necessaryto verify the correctness and the accuracy of the proposedformula (22) The values of impact stiffness from the presentformula have been compared with those determined by othermethods Furthermore the precision of the present formulais verified through numerical simulations for poundingresponse
The comparison study among three kinds of methods forimpact stiffness has been conducted that is taking the impactstiffness follows respectively the axial stiffness formula (see(21)) the present formula (see (22)) andColersquos formulawhichis expressed as follows [23]
119896 =(11989811198982 (1198981+ 1198982)) (120587119879
1)2
1 minus ((minus ln 119903) radic1205872 + (ln 119903)2)
2 (23)
Moreover the effect of different parametric values such as themass ratio of two impact bodies and the restitution coefficienton impact stiffness has been investigated We take the impactbetween two simplified concrete bodies as an example Thefollowing parameters in the analysis have been used 120588
1= 1205882
= 26 times 103 kgm3 1198641= 1198642= 345 times 1010 Pa 119860
1= 1198602= 4m2
and 1198711= 40m and the mass ratio of two bodies (119898
1le 1198982)
is taken as follows
120573 =1198982
1198981
(24)
In the case of constant mass ratio 120573 = 2 the restitutioncoefficient 119903 ranged from 03 to 1 with an increment of 001Moreover in the case of fixed restitution coefficient 119903 = 065the mass ratio 120573 has been set from 1 to 5 with an incrementof 005 (the change of the mass ratio results from the lengthvariation of body 2 in Figure 1) The values of the impactstiffness from three kinds of methods are normalized asfollows
120583 =119896
1198961198861
(25)
where 120583 is the stiffness ratio relative to the axial stiffness ofimpact body 1
The comparisons of results from three kinds of methodsfor impact stiffness are presented in Figures 3 and 4 respec-tively It can be seen fromboth figures that the impact stiffnesscalculated by the present formula (see (22)) is obviouslydifferent from those determined by the other two methods
Shock and Vibration 5
03 04 05 06 07 08 09 100
02
04
06
08
10
12
14
16
18
20
Stiff
ness
ratio
120583
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 3 The impact stiffness from three kinds of methods withrespect to different restitution coefficients
10 15 20 25 30 35 40 45 500
0204060810121416182022
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Stiff
ness
ratio
120583
Figure 4 The impact stiffness from three kinds of methods withrespect to different mass ratios
Moreover it can be seen from Figure 3 that the impactstiffness given by the proposed formula is much smaller thanthose from Colersquos formula (see (23)) and the axial stiffnessformula (see (21)) at the level of restitution coefficient 119903
varying from 03 to 1 Similarly this trend has been observedin Figure 4 where the values given by the proposed formulaare much smaller than those given by Colersquos formula and theaxial stiffness formula Guo et al [27 28] and Wang et al[29] commented that for the seismic pounding of a bridgethe impact stiffness obtained from experiment is significantlysmaller than that from theoretical analysis Khatiwada et al[30] studied five different impact force models and carriedout shake table tests for pounding between two steel portal
frames It was found that the Hertz-damp model alwaysoverestimated the responses while the other four models alsofrequently overestimated the amplificationsThus the predic-tions from the four models were not significantly differentSince the linear viscoelastic model requires substantiallyless computation this model is more suitable for numericalmodelling of pounding responses compared with the othermodels It is seen from Figures 3 and 4 that the impactstiffness from the present formula is just lower than that fromthe axial stiffness formula and greatly lower than that fromColersquos formula Furthermore it can be seen from Figures 3and 4 that both restitution coefficient and mass ratio havea significant influence on the impact stiffness described bythe proposed formulaThe impact stiffness increases with theincrease of restitution coefficient or mass rate
In order to verify the accuracy of the proposed for-mula for impact stiffness a comparison of the maximumimpact forces from pounding simulations using the linearviscoelastic model has been made In the numerical analysisthe impact stiffness determined by three kinds of methodsrespectively was used and the same model parameters asgiven above were taken In the case of mass ratio 120573 = 2 andthe initial relative velocity V
10minus V20
= 2ms the coefficientof restitution r ranged from 04 to 1 with an increment of 01In the case of mass ratio 120573 = 2 and the restitution coefficient119903 = 065 the initial relative velocity (V
10minusV20) was taken from
1ms to 5ms with an increment of 1ms In the case of therestitution coefficient 119903 = 065 and the initial relative velocityV10
minus V20
= 2ms the mass ratio 120573 varies from 1 to 5 with anincrement of 1 The fourth-order Runge-Kutta method withthe constant time step Δ119905 = 00001 s was applied in thenumerical computations The referenced maximum impactforce 119865
119905max used for comparison comes from the followingformula [18 19]
119865119905max =
V10
minus V20
1radic11989811198961198861
+ 1radic11989821198961198862
(26)
The relative error of the maximum impact force from thenumerical simulations was assessed by the following
120578 =
1003816100381610038161003816119865max minus 119865119905max
1003816100381610038161003816
119865119905max
times 100 (27)
where 120578 is the relative error 119865max is the maximum impactforce from the numerical simulations
The drift envelopes of the relative errors of maximumimpact forces from numerical simulations based on thelinear viscoelastic model with respect to impact stiffnessgiven by three kinds of methods are presented in Figures5 6 and 7 It can be seen from Figures 5ndash7 that the linearviscoelastic model with the impact stiffness coming from theproposed formula (see (22)) gives the least relative errors onthe average meaning compared to the results based on theimpact stiffness given by Colersquos formula (see (23)) and thatgiven by the axial stiffness formula (see (21)) Therefore itmay be inferred that the linear viscoelastic model using theimpact stiffness given by the proposed formula could providea more precise simulation to the structural pounding thanthose given by the other two formulae
6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
03 04 05 06 07 08 09 100
02
04
06
08
10
12
14
16
18
20
Stiff
ness
ratio
120583
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 3 The impact stiffness from three kinds of methods withrespect to different restitution coefficients
10 15 20 25 30 35 40 45 500
0204060810121416182022
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Stiff
ness
ratio
120583
Figure 4 The impact stiffness from three kinds of methods withrespect to different mass ratios
Moreover it can be seen from Figure 3 that the impactstiffness given by the proposed formula is much smaller thanthose from Colersquos formula (see (23)) and the axial stiffnessformula (see (21)) at the level of restitution coefficient 119903
varying from 03 to 1 Similarly this trend has been observedin Figure 4 where the values given by the proposed formulaare much smaller than those given by Colersquos formula and theaxial stiffness formula Guo et al [27 28] and Wang et al[29] commented that for the seismic pounding of a bridgethe impact stiffness obtained from experiment is significantlysmaller than that from theoretical analysis Khatiwada et al[30] studied five different impact force models and carriedout shake table tests for pounding between two steel portal
frames It was found that the Hertz-damp model alwaysoverestimated the responses while the other four models alsofrequently overestimated the amplificationsThus the predic-tions from the four models were not significantly differentSince the linear viscoelastic model requires substantiallyless computation this model is more suitable for numericalmodelling of pounding responses compared with the othermodels It is seen from Figures 3 and 4 that the impactstiffness from the present formula is just lower than that fromthe axial stiffness formula and greatly lower than that fromColersquos formula Furthermore it can be seen from Figures 3and 4 that both restitution coefficient and mass ratio havea significant influence on the impact stiffness described bythe proposed formulaThe impact stiffness increases with theincrease of restitution coefficient or mass rate
In order to verify the accuracy of the proposed for-mula for impact stiffness a comparison of the maximumimpact forces from pounding simulations using the linearviscoelastic model has been made In the numerical analysisthe impact stiffness determined by three kinds of methodsrespectively was used and the same model parameters asgiven above were taken In the case of mass ratio 120573 = 2 andthe initial relative velocity V
10minus V20
= 2ms the coefficientof restitution r ranged from 04 to 1 with an increment of 01In the case of mass ratio 120573 = 2 and the restitution coefficient119903 = 065 the initial relative velocity (V
10minusV20) was taken from
1ms to 5ms with an increment of 1ms In the case of therestitution coefficient 119903 = 065 and the initial relative velocityV10
minus V20
= 2ms the mass ratio 120573 varies from 1 to 5 with anincrement of 1 The fourth-order Runge-Kutta method withthe constant time step Δ119905 = 00001 s was applied in thenumerical computations The referenced maximum impactforce 119865
119905max used for comparison comes from the followingformula [18 19]
119865119905max =
V10
minus V20
1radic11989811198961198861
+ 1radic11989821198961198862
(26)
The relative error of the maximum impact force from thenumerical simulations was assessed by the following
120578 =
1003816100381610038161003816119865max minus 119865119905max
1003816100381610038161003816
119865119905max
times 100 (27)
where 120578 is the relative error 119865max is the maximum impactforce from the numerical simulations
The drift envelopes of the relative errors of maximumimpact forces from numerical simulations based on thelinear viscoelastic model with respect to impact stiffnessgiven by three kinds of methods are presented in Figures5 6 and 7 It can be seen from Figures 5ndash7 that the linearviscoelastic model with the impact stiffness coming from theproposed formula (see (22)) gives the least relative errors onthe average meaning compared to the results based on theimpact stiffness given by Colersquos formula (see (23)) and thatgiven by the axial stiffness formula (see (21)) Therefore itmay be inferred that the linear viscoelastic model using theimpact stiffness given by the proposed formula could providea more precise simulation to the structural pounding thanthose given by the other two formulae
6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
0
20
40
60
80
100
120
04 05 06 07 08 09 1
Relat
ive e
rror
120578 (
)
Restitution coefficient r
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 5 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different restitution coefficients
0
20
40
60
80
100
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Axial stiffness formulaColersquos formulaThe proposed formula
Initial relative velocity (10 minus 20) (ms)
Figure 6 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different initial relative velocitiesbetween two bodies
It should be mentioned that in order to derive thepresent formula of impact stiffness the maximum impactdeformation in the distributed mass model is assumed to bethe same as that from the equivalent lumped mass modelThis equivalence is essentially approximate However thenumerical comparison has verified the acceptable accuracyof the present formula at least for the actual engineeringapplication
4 Conclusions
In this paper a new formula to calculate the impact stiffnessof linear viscoelastic model for pounding simulation has
0
20
40
60
80
100
120
140
1 2 3 4 5
Relat
ive e
rror
120578 (
)
Mass ratio 120573
Axial stiffness formulaColersquos formulaThe proposed formula
Figure 7 The relative errors of maximum impact forces fromnumerical simulations based on three kinds of methods to calculateimpact stiffness with respect to different mass ratios of two bodies
been derived by equating the maximum impact deformationfrom the distributed mass model to that from the equivalentlumped mass model In order to verify the accuracy of theproposed formula the comparison of pounding simulationsfrom three different formulae has been conducted The anal-ysis indicates that the impact stiffness of linear viscoelasticmodel provided by the proposed formula is much smallerthan the axial stiffness of the colliding body which is closer tothe experimental observation The accuracy of the proposedformula has been verified through comparing the numericalsimulation results with the analytical solutions Thereforemore reliable results for pounding simulation in structuralengineering could be provided by using the linear viscoelasticmodel with the present formula of impact stiffness
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is financially supported by the National Key BasicResearch Program of China (Grant no 2013CB036300) theNational Natural Science Foundation of China (Grant no51178220) the Science and Technology Support Program ofJiangsu Province (Grant no BE2014716) and the Key ScienceResearch Project of Universities of Jiangsu Province (Grantno 12KJA580002)
References[1] Y Zheng X Xiao L Zhi and G Wang ldquoEvaluation on impact
interaction between abutment and steel girder subjected tononuniform seismic excitationrdquo Shock and Vibration vol 2015Article ID 981804 14 pages 2015
[2] U Schramm and W D Pilkey ldquoOptimal design of structuresunder impact loadingrdquo Shock and Vibration vol 3 no 1 pp69ndash81 1996
Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
[3] H Naderpour R C Barros S M Khatami and R JankowskildquoNumerical study on pounding between two adjacent buildingsunder earthquake excitationrdquo Shock and Vibration vol 2016Article ID 1504783 9 pages 2016
[4] V V Bertero and R G Collins ldquoInvestigation of the failures ofthe Olive View stairtowers during the San Fernando earthquakeand their implications on seismic designrdquo Tech Rep EERC73ndash26 Earthquake Engineering Research Center University ofCalifornia Berkeley Calif USA 1973
[5] K Kasai and B F Maison ldquoBuilding pounding damage duringthe 1989 Loma Prieta earthquakerdquo Engineering Structures vol19 no 3 pp 195ndash207 1997
[6] J A Norton A B King D K Bull et al ldquoNorthridgeearthquake reconnaissance reportrdquo Bulletin of the New ZealandNational Society for Earthquake Engineering vol 27 no 4 pp235ndash344 1994
[7] H Otsuka M Suzuki S Unjoh T Terayama and T NozakildquoDamage to road bridges (1995 Hyogoken nanbu earthquake)rdquoJournal of Research Japan vol 33 pp 135ndash255 1997
[8] J Uzarski and C Arnold ldquoChi-Chi Taiwan Earthquake ofSeptember 21 1999 reconnaissance report 2001rdquo EarthquakeSpectra vol 17 pp 37ndash60 2001
[9] F Pratesi S Sorace and G Terenzi ldquoAnalysis and mitigationof seismic pounding of a slender RC bell towerrdquo EngineeringStructures vol 71 pp 23ndash34 2014
[10] A Liolios A Liolios G Hatzigeorgiou and S Radev ldquoPound-ing effects on the earthquake response of adjacent reinforcedconcrete structures strengthened by cable elementsrdquo Journal ofTheoretical andAppliedMechanics vol 44 no 2 pp 41ndash56 2014
[11] N Chouw ldquoInfluence of soil-structure interaction on poundingresponse of adjacent buildings due to near-source earthquakesrdquoJournal of Applied Mechanics vol 5 pp 543ndash553 2002
[12] A Guo Z Li and H Li ldquoPoint-to-surface pounding ofhighway bridges with deck rotation subjected to bi-directionalearthquake excitationsrdquo Journal of Earthquake Engineering vol15 no 2 pp 274ndash302 2011
[13] M Licari S Sorace and G Terenzi ldquoNonlinear modeling andmitigation of seismic pounding between RC frame buildingsrdquoJournal of Earthquake Engineering vol 19 no 3 pp 431ndash4602015
[14] B F Maison and K Kasai ldquoAnalysis for type of structuralpoundingrdquo Journal of Structural Engineering vol 116 no 4 pp957ndash977 1990
[15] L L Cui A X Guo and H Li ldquoInvestigation of the parametersof hertz impact model for the pounding analysis of highwaybridgerdquo Procedia Engineering vol 14 pp 2773ndash2778 2011
[16] Y Liu W-G Liu X Wang W-F He and Q-R Yang ldquoNewequivalent linear impact model for simulation of seismicisolated structure pounding against moat wallrdquo Shock andVibration vol 2014 Article ID 151237 10 pages 2014
[17] S Muthukumar and R DesRoches ldquoA Hertz contact modelwith non-linear damping for pounding simulationrdquo EarthquakeEngineering and Structural Dynamics vol 35 no 7 pp 811ndash8282006
[18] S Khatiwada N Chouw and J W Butterworth ldquoA genericstructural pounding model using numerically exact displace-ment proportional dampingrdquo Engineering Structures vol 62-63no 3 pp 33ndash41 2014
[19] P Komodromos P C Polycarpou L Papaloizou and M CPhocas ldquoResponse of seismically isolated buildings consideringpoundingsrdquo Earthquake Engineering and Structural Dynamicsvol 36 no 12 pp 1605ndash1622 2007
[20] P Komodromos ldquoSimulation of the earthquake-inducedpounding of seismically isolated buildingsrdquo Computers andStructures vol 86 no 7-8 pp 618ndash626 2008
[21] S-H Kim and M Shinozuka ldquoEffects of seismically inducedpounding at expansion joints of concrete bridgesrdquo Journal ofEngineering Mechanics vol 129 no 11 pp 1225ndash1234 2003
[22] R Jankowski KWilde and Y Fujino ldquoPounding of superstruc-ture segments in isolated elevated bridge during earthquakesrdquoEarthquake Engineering and Structural Dynamics vol 27 no 5pp 487ndash502 1998
[23] G Cole R Dhakal A Carr and D Bull ldquoAn investigationof the effects of mass distribution on pounding structuresrdquoEarthquake Engineering and Structural Dynamics vol 40 no6 pp 641ndash659 2011
[24] G Cole R Dhakal A Carr and D Bull ldquoThe effect ofdiaphragmwave propagation on the analysis of pounding struc-turesrdquo in Proceedings of the ECCOMASThematic Conference onComputationalMethods in Structural Dynamics and EarthquakeEngineering (COMPDYN rsquo09) Rhodes Greece June 2009
[25] G Watanabe and K Kawashima ldquoNumerical simulation ofpounding of bridge decksrdquo in Proceedings of the 13th WorldConference on Earthquake Engineering Conference (WCEE rsquo04)Vancouver Canada 2004
[26] S A Anagnostopoulos ldquoEquivalent viscous damping for mod-eling inelastic impacts in earthquake pounding problemsrdquoEarthquake Engineering and Structural Dynamics vol 33 no 8pp 897ndash902 2004
[27] A X Guo Z Li H Li and J Ou ldquoExperimental and analyticalstudy on pounding reduction of base-isolated highway bridgesusing MR dampersrdquo Earthquake Engineering and StructuralDynamics vol 38 no 11 pp 1307ndash1333 2009
[28] A X Guo L L Cui and H Li ldquoImpact stiffness of the contact-element models for the pounding analysis of highway bridgesexperimental evaluationrdquo Journal of Earthquake Engineeringvol 16 no 8 pp 1132ndash1160 2012
[29] D-S Wang Q-M Feng and G-X Wang ldquoAnalysis model ofpounding between adjacent bridge girders during earthquakesbased on collinear impact between rodsrdquo Engineering Mechan-ics vol 21 no 2 pp 157ndash166 2004 (Chinese)
[30] S Khatiwada J W Butterworth and N Chouw ldquoEvaluationof numerical pounding models with experimental validationrdquoBulletin of the New Zealand Society for Earthquake Engineeringvol 46 no 3 pp 117ndash130 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of



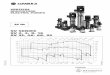







![[sv] Validity date from LAND Vietnam 00269 [SV] SECTION ... · 2 / 33 [sv] List in force Godkännandenum mer Namn Ort [sv] Regions [sv] Activities [sv] Remark [sv] Date of request](https://img.pdfslide.us/doc/110x75/5d66deeb88c99332038b89d9/sv-validity-date-from-land-vietnam-00269-sv-section-2-33-sv-list.jpg)