Embed Size (px)
Citation preview

Research ArticleControl Performance and Robustness of Pounding Tuned MassDamper for Vibration Reduction in SDOF Structure
Qichao Xue12 Jingcai Zhang1 Jian He1 and Chunwei Zhang23
1College of Aerospace and Civil Engineering Harbin Engineering University Harbin China2School of Civil Engineering Qingdao University of Technology Qingdao China3Institute for Infrastructure Engineering Western Sydney University Sydney NSW Australia
Correspondence should be addressed to Chunwei Zhang chunweizhangwesternsydneyeduau
Received 31 August 2016 Accepted 27 October 2016
Academic Editor Ganging Song
Copyright copy 2016 Qichao Xue et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper investigates the control performance of pounding tuned mass damper (PTMD) in reducing the dynamic responses ofSDOF (Single Degree of Freedom) structure Taking an offshore jacket-type platform as an example the optimal damping ratioand the gap between mass block and viscoelastic material are presented depending on a parametric study Control efficiencyinfluenced by material properties and contact geometries for PTMD is analyzed here as well as robustness of the device Theresults of numerical simulations indicated that satisfactory vibration mitigation and robustness can be achieved by an optimallydesigned PTMD Comparisons between PTMD and traditional TMD demonstrate the advantages of PTMD not only in vibrationsuppression and costs but also in effective frequency bandwidth
1 Introduction
An offshore platform is essential equipment for ocean oildevelopment with high construction cost and it may leadto serious damage when subjected to seismic effects [1 2]Therefore an effective vibration reduction solution is neces-sary for offshore platforms Tuned mass damper (TMD) is atraditional control device installed on the offshore platform toreduce the seismic vibration responses Kawano et al [3] firstinvestigated seismic responses of the offshore platform withTMD and indicated that TMD can reduce seismic vibrationeffectively Since thenmany researches have focused onTMDapplications on platforms For instance Wu et alrsquos study [4]on high response performance of TMD indicates that TMDcan significantly reduce the vibration of the platform and aremarkable decreased power spectral density can be achieved
However TMDs have several disadvantages in utilizingstructure vibration control First of all most of TMD devicesneed to be tuned to the first natural frequency of theprimary structure to obtain better control performance Oncethe excitationrsquos frequency deviates from the first naturalfrequency TMDrsquos vibration reduction will decrease sharply
and even cause terrible adverse effects At this time althoughan extra damper attaching to TMD can suppress the adverseeffects it is costly and will lead to waste of space due to thelarge motion of the mass block
In order to avoid the foregoing disadvantages and achievesatisfactory vibration control performance many new analy-sis technologies have been applied to improveTMDAlmazanet al [5] proposed a bidirectional and homogeneous tunedmass damper (BH-TMD) for passive control of vibrationsBoth experimental and numerical simulation results demon-strate the superiority of the modified TMD system over thetraditional one A conceptual system for a semiactive tunedmass damper (STMD) with variable damping coefficientsand stiffness values was presented by Chey et al [6] Sunand Nagarajaiah [7] presented a new algorithm for STMDto adjust the damping coefficient for different excitationJafarabad et al [8] installed a hybrid damping system to con-trol the seismic vibration which contains a friction damperdevice (FDD) and a tuned mass damper (TMD) Mohebbi etal [9] analyzed optimum parameters of multiple tuned massdampers (MTMDs) for different design criteria under seismicexcitation
Hindawi Publishing CorporationShock and VibrationVolume 2016 Article ID 8021690 15 pageshttpdxdoiorg10115520168021690
2 Shock and Vibration
(1) (6) (7)
(8)
(4)
(5) (5)(3)
(4) (6)
(3)(2)
(1)
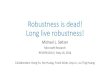
(1) Limiter of TMD (2) Bottom board(3) Limiter of pounding device(4) Viscoelastic material
(6) Damper(7) Mass block(8) Rolling bearings
(5) Spring
Figure 1 Schematic graph of PTMD with viscoelastic material layers
Despite the former new analysis technologies some novelcontrol devices were proposed on platforms too Huo andLi [10] developed a circular tuned liquid column damper(CTLCD) to control the platformrsquos torsional responses underseismic loads Li et alrsquos [11] research shows that satisfactoryvibrationmitigation can be achieved by a new shapememoryalloy (SMA) damper Ou et al [12] proposed a dampingisolation system which was composed of rubber bearingsand viscous dampers for controlling vibration Komachi etal [13] applied a friction damper device to a steel jacketplatform located in an active zone and investigated theperformance when subjected to seismic excitation Mousaviet al [14 15] employed a tuned liquid column-gas damper(TLCGD) to suppress the seismic vibration and obtainedoptimum geometric parameters for a platform Sarrafan etal [16] presented an intelligent nonlinear neurofuzzy controlstrategy for magnetorheological (MR) damper system inorder to adjust controlling force for different excitationsLotfollahi-Yaghin et al [17] verified the seismic control per-formance of tuned liquid damper (TLD) on typical offshorejacket-type platforms excited by El Centro Kobe and Tabasearthquakes
Pounding tuned mass damper (PTMD) is proposed asa combination of traditional TMD and pounding effects byZhang et al [18] Zhang et al [18ndash22] investigated the vibra-tion control performance of PTMD on power transmissiontower and subsea jumpers as well as traffic signal polesThere is rarely a result showing the performance of PTMDon offshore platform
In this paper taking an offshore jacket platform as anexample control performance and robustness of PTMDfor vibration reduction in SDOF structure are analyzedto investigate the seismic control performance Influencesof different parameters are discussed including dampingratio gap between mass block and viscoelastic layer contactgeometries robustness and viscoelastic properties Further-more a comparison between PTMD and traditional TMD ispresented to verify the advantages of PTMD
Table 1 Parameters of the offshore jacket platform
Test 1 Test 2
Real platform 119891Hz 1205851 1198981119905090 085 40ndash55 3127
Simplified model 119891Hz 1198961kNsdotsminus1 1198881kNsdot(msdotsminus1) 1198981kg087 93436 1367 3127000
2 Schematic of PTMD with Viscoelastic layers
As an improvement of TMD PTMD consists of two partsa traditional TMD and a limiter layered by viscoelasticmaterials Gaps betweenmass block and viscoelastic materialare reserved as shown in Figure 1 When the relative motionoccurs between mass block and viscoelastic layer withoutpounding effect PTMD acts as a TMD Otherwise the massblock will impact the viscoelastic layer which will producepounding force as an extra controlling effect and energy willbe dissipated during the pounding process One of the mostremarkable advantages of this device is that controlling forcescome from not only resonant force but also pounding forceduring the impact
3 Modeling
31 Modeling of the System As a widely used platform type inthe Bohai Sea of China JZ20-2MUQ offshore jacket platformplays an important role in the field of petroleum recoveryTheplatform consists of three parts 3-story frame for living 2-story frame for working and the jackets Ou et alrsquos research[23] shows that the platform can be simplified to a SingleDegree of Freedom (SDOF) structure since the mass of theupper quarter is dominant to the whole structure Figure 2shows the JZ20-2MUQ offshore jacket platform and thesimplified model The basic parameters are given in Table 1based on Ou et alrsquos research
Shock and Vibration 3
m1
k1
EL +397580
EL +362580
EL +327580
EL +28500
EL +23000
EL +16500
EL +10000EL +5850
EL minus3500
EL minus15500
(a) A real platform (b) The elevation (c) The simplified model
Figure 2 JZ20-2MUQ offshore jacket platform
Viscoelastic material
k1
k2
dgapdgap
c1
c2
Figure 3 Schematic of a SDOF structure controlled by PTMD
32 Dynamic Equations of the System The schematic ofa SDOF structure controlled by PTMD is illustrated inFigure 3 and the motion equation of the system can beexpressed as
[1198981 00 1198982] sdot
11990911199092 + [1198881 + 1198882 minus1198882minus1198882 1198882 ] sdot
11990911199092
+ [1198961 + 1198962 minus1198962minus1198962 1198962 ] sdot 11990911199092
= 119875 sin120596119905 + 119867 (119889) 119865minus119867 (119889) 119865 (1)
where 1198981 and 1198982 are mass of primary structure and PTMDrespectively 1199091 1199091 and 1199091 are acceleration velocity anddisplacement of the primary structure 1199092 1199092 and 1199092 areacceleration velocity and displacement of the PTMD 1198881 and1198882 are stiffness of primary structure and PTMD respectively1198961 and 1198962 are stiffness of primary structure and PTMD
respectively 119865 is the pounding force induced by collisionsbetween mass block and viscoelastic layer 119867(119889) is Havsidfunction
119867(119889) = 1 |119889| minus 119889gap gt 00 otherwise
(2)
where 119889 represents the relative displacement between thePTMDand the primary structure and is calculated by (3)119889gapis the gap between the mass block and the viscoelastic layerHence
119889 = 1199092 minus 1199091 (3)
where 119875 is the amplitude of the external force in order tosimplify the calculation process 119875 = 133 Modeling of Pounding Force
331 Pounding Force Expressions for Two Kinds of ContactGeometries Figure 4(a) is a sketch for a mass block withsphere head pounding to a plane surface which will beutilized later in this paper to simulate vibration performanceof PTMD Figure 4(b) shows that an end plane of thecolumn is pounding to plane which will be calculated as acomparison to discuss influences of contact geometries Thepounding force can be calculated by (4) according to contactmechanics [24]
119865119888 = 43119877121 119864lowast120575321 for sphere to plane119865119888 = 21198771119864lowast1205751 for column to plane
(4)
where 1198771 is the radius of the hemisphere or ending roundplane for column 119877 = 05 meters in this paper 1205751 is
4 Shock and Vibration
Viscoelasticmaterial
Mass block
(a) Sphere to plane (b) Column to plane (c) 3-parameter model
12057511205751
R1R1
2R1
E1
E2
C
Figure 4 Schematic of contact geometries and 3-parameter viscoelastic model
the penetration displacement 119864lowast is the equivalent elasticitymodulus and can be derived by the following expression
1119864lowast =(1 minus 1205992119904 )119864119904 + (1 minus 1205992119901)119864119901 (5)
where 120592119901 120592119904 119864119901 and 119864119904 are Poissonrsquos ratio and modulusof elasticity for polymer and steel respectively In case ofpolymer contact with steel the modulus of elasticity for steelis far larger than polymer and the expression of 119864lowast can besimplified as follows
119864lowast = 1198641199011 minus 1205992119901 (6)
According to the Correspondence Principle of viscoelas-ticity pounding force expressions can be deduced by inverseLaplace transformation from (4) and (6)
119865(119905) = 431198771211 minus 1205992119901 ℓ
minus1 (119876 (119904)119875 (119904) ) 120575321 (119905)for sphere to plane
119865(119905) = 2 11987711 minus 1205992119901 ℓminus1 (119876 (119904)119875 (119904) ) 1205751 (119905)
for column to plane
(7)
For linear viscoelastic materials 119876(119904) and 119875(119904) are poly-nomial of parameter 119904 and they can be calculated automat-ically as a transfer function with different initial values byMATLABSimulink
4 Parametric Study
To obtain optimal parametric settings of PTMD dampingratio of the PTMD gap between mass block and viscoelasticlayer contact geometries and viscoelastic properties arediscussed in this section Unless otherwise indicated con-stitutive parameters of viscoelastic material in this paperare shown in Table 2 And 1198641 1198642 and 1198621 are the springparameters and dash-pot parameter for 3-parameter modelof viscoelastic material in Figure 4(c)
Table 2 Constitutive parameters of the viscoelastic material
1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPa20411198645 20411198645 391198644 1081198645
For comparison performance of an optimal TMD ispresented based on Ioi and Ikedarsquos research [25] in whichoptimal frequency and damping ratio can be expressed as
119891opt = 11 + 120583 minus (0241 + 17120583 minus 261205832) 1205852119904 (8)
120585opt = radic 31205838 (1 + 120583) + (013 + 012120583 + 041205832) 1205852minus (001 + 009120583 + 31205832) 1205852
(9)
where 119891opt and 120585opt are the optimal frequency and dampingratio for the TMD 120583 is mass ratio and 120585119904 is damping ratio ofprimary structure
41 Damping Ratio In order to illustrate the parametersrsquoinfluence more accurately and efficiently the dimensionlessmethod is applied to the data analysis
120575 = 119889gap120575119904 120575119904 = 1198751198961 119891119890 = 1205961205961
(10)
where 119889gap is the gap between mass block and viscoelasticmaterial 120575 is the dimensionless gap and 120575119904 is the staticdisplacement of the primary structure 119875 is the amplitude ofthe sinusoidal wave which is input into the SDOF systemand 1198961 is the structural stiffness of the primary structureThefrequency ratio which is defined as119891119890 is an index of degree forsinusoidal wave deviating from the natural frequency and 120596and 1205961 represent the sinusoidal wave frequency and naturalfrequency of the primary structure respectively
Dynamic amplification factor defined as 119877 in (11) is in-troduced to evaluate the performance of controlling devices
Shock and Vibration 5
In addition the mass ratio is assumed to be 20 which is themost common selection in engineering practice Hence
119877 = 1199091peak120575119904 (11)
where 1199091peak is the peak value of the displacement in steadystate subjected to sinusoidal wave excitationThe dimension-less displacement and acceleration of the primary structurenamed119883 and 119860 respectively can be calculated as follows
119883 = 119909120575119904 119860 =
(12)
where 119909 is the displacement of the primary structure duringthe excitation and 119860 is the second derivative in time of119883
Damping ratio of PTMD defined as 1205852 can be calculatedas
1205852 = 1198882212058311989811205962 (13)
where 1198882 and 1205962 are damping coefficient and circular fre-quency of PTMD1198981 is the mass of the platform and 120583 is themass ratio Thus we can conclude that only in case of 1205852 = 0is PTMD undamped
Figure 5 illustrates the relationship between119877 and119891119890 withdifferent damping ratios in the relative frequency domainIt can be observed from Figure 5(a) that an undampedPTMD has obvious magnification in structure responses Forinstance maximum value of 119877 is 283 for PTMD when 120575 isequal to 2 and it is almost triple those controlled by TMDIn this situation PTMD is not suitable as a vibration controldevice
A damper in vibration control device can effectivelyeliminate magnification effect (1205852 = 0) Figure 5(c) displaysthe performance of PTMD with different gaps when anoptimal damper parameter is applied Although vibrationcontrol performance for PTMD is much better than TMDwhen 119891119890 varies from 09 to 13 there is a significantly inverseeffect on primary structure response for PTMD in case 119891119890 isless than 09 That means the optimal damping ratio whichis based on TMD is no longer applicable to PTMD due topounding effects
From Figures 5(b)ndash5(e) 119877 diminishes with the increasingof damping ratio from 0 to 30120585opt when the gap value is aconstant As 1205852 is 30120585opt PTMD shows a more remarkableperformance compared to TMD Moreover 119877 rises with theincrease of gap in this situation which indicates that impactplayed a positive role in vibration reduction
However Figure 5(f) shows that the structures vibratemore severely in case of 1205852 = 40120585opt than those withthe same gap and 1205852 = 30120585opt Further PTMD shows apoorer performance than TMD when 120575 is equal to 10 In thissituation although an additional damper may enhance theefficiency of PTMD an excessive damping ratio may lead toan opposite effect
From Figures 5(a)ndash5(f) we can obtain an optimal damp-ing ratio for the best performance of PTMD in this case1205852opt = 30120585opt
42 Influences of Gap From an energy viewpoint energy canbe dissipated from the damper in TMD or PTMD as wellas the impact process between mass block and viscoelasticmaterial A small gap in PTMD means that the mass willimpact the viscoelasticmaterial more severely and frequentlyIn an extreme case where the gap is large enough the impactwill not happen and PTMD turns into a traditional TMD
Figure 5 clearly revealed that a sufficient gap is indis-pensable to an undamped PTMD to avoid the adverse effectcaused by the impact To quantify the energy dissipation ofPTMD the root mean square (RMS) of displacement andthe acceleration of the primary structure are defined as in(14) A smaller RMS means more energy will be dissipatedor transformed to dampers Hence
RMS1198831
= radicsum1198991 (1198831119894)2119899 119883119894 = 1198751199091198941198961
(14)
Figure 6 plots the changing trend of RMS1198601
and RMS1198831
along with dimensionless gap In this case 1205852 = 3120585119905 withmassratio 2 and 119899 is the number of values in the time historyrecord
It can be observed from Figure 6 that both of RMS119860 andRMS119883 decrease with the increasing of 120575 and finally tendto be a constant under a low frequency of sinusoidal waveexcitation (where 119891119890 is 07 and 08) Considering that PTMDwill degenerate to TMD when RMS turns to a constantimpact has a negative effect on PTMDrsquos performance in thissituationThatmeans a large gap is required for low frequencyexcitation
However for relatively high frequency excitation with 119891119890higher than 09 both RMS119860 and RMS119883 increase with therising of the dimensionless gap An optimal gap value willavoid the negative effect and maximize the positive effectThis is always needed for PTMD due to the randomnessand variety of earthquakes From Figure 6 the optionaldimensionless gap 120575 is about 2 for offshore jacket platformin this paper
43 Material Properties Properties of the viscoelastic mate-rial layer in PTMD will give different vibration reductionresults It is clear that the material with a higher 119864lowast caninduce a larger pounding force under the same situationwhich may enhance the controlling force and get moremomentum exchanged during an impact Two additionalmaterials named type A and B (shown in Table 3) togetherwith former materials in Table 2 are utilized to investigatethe influence of material properties on PTMDThe results areillustrated in Figure 7
Figure 7(b) shows time history of the dimensionlessdisplacement of the platform controlled by PTMD withdifferent materials in case of 119891119890 = 11 It can be seen in thiscase that a higher equivalent elastic modulus can improvethe controlling performance However in Figure 7(a) whichcorresponds to the case 119891119890 = 085 it is indicated that theequivalent elasticity modulus has an opposite effect which
6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
(1) (6) (7)
(8)
(4)
(5) (5)(3)
(4) (6)
(3)(2)
(1)
(1) Limiter of TMD (2) Bottom board(3) Limiter of pounding device(4) Viscoelastic material
(6) Damper(7) Mass block(8) Rolling bearings
(5) Spring
Figure 1 Schematic graph of PTMD with viscoelastic material layers
Despite the former new analysis technologies some novelcontrol devices were proposed on platforms too Huo andLi [10] developed a circular tuned liquid column damper(CTLCD) to control the platformrsquos torsional responses underseismic loads Li et alrsquos [11] research shows that satisfactoryvibrationmitigation can be achieved by a new shapememoryalloy (SMA) damper Ou et al [12] proposed a dampingisolation system which was composed of rubber bearingsand viscous dampers for controlling vibration Komachi etal [13] applied a friction damper device to a steel jacketplatform located in an active zone and investigated theperformance when subjected to seismic excitation Mousaviet al [14 15] employed a tuned liquid column-gas damper(TLCGD) to suppress the seismic vibration and obtainedoptimum geometric parameters for a platform Sarrafan etal [16] presented an intelligent nonlinear neurofuzzy controlstrategy for magnetorheological (MR) damper system inorder to adjust controlling force for different excitationsLotfollahi-Yaghin et al [17] verified the seismic control per-formance of tuned liquid damper (TLD) on typical offshorejacket-type platforms excited by El Centro Kobe and Tabasearthquakes
Pounding tuned mass damper (PTMD) is proposed asa combination of traditional TMD and pounding effects byZhang et al [18] Zhang et al [18ndash22] investigated the vibra-tion control performance of PTMD on power transmissiontower and subsea jumpers as well as traffic signal polesThere is rarely a result showing the performance of PTMDon offshore platform
In this paper taking an offshore jacket platform as anexample control performance and robustness of PTMDfor vibration reduction in SDOF structure are analyzedto investigate the seismic control performance Influencesof different parameters are discussed including dampingratio gap between mass block and viscoelastic layer contactgeometries robustness and viscoelastic properties Further-more a comparison between PTMD and traditional TMD ispresented to verify the advantages of PTMD
Table 1 Parameters of the offshore jacket platform
Test 1 Test 2
Real platform 119891Hz 1205851 1198981119905090 085 40ndash55 3127
Simplified model 119891Hz 1198961kNsdotsminus1 1198881kNsdot(msdotsminus1) 1198981kg087 93436 1367 3127000
2 Schematic of PTMD with Viscoelastic layers
As an improvement of TMD PTMD consists of two partsa traditional TMD and a limiter layered by viscoelasticmaterials Gaps betweenmass block and viscoelastic materialare reserved as shown in Figure 1 When the relative motionoccurs between mass block and viscoelastic layer withoutpounding effect PTMD acts as a TMD Otherwise the massblock will impact the viscoelastic layer which will producepounding force as an extra controlling effect and energy willbe dissipated during the pounding process One of the mostremarkable advantages of this device is that controlling forcescome from not only resonant force but also pounding forceduring the impact
3 Modeling
31 Modeling of the System As a widely used platform type inthe Bohai Sea of China JZ20-2MUQ offshore jacket platformplays an important role in the field of petroleum recoveryTheplatform consists of three parts 3-story frame for living 2-story frame for working and the jackets Ou et alrsquos research[23] shows that the platform can be simplified to a SingleDegree of Freedom (SDOF) structure since the mass of theupper quarter is dominant to the whole structure Figure 2shows the JZ20-2MUQ offshore jacket platform and thesimplified model The basic parameters are given in Table 1based on Ou et alrsquos research
Shock and Vibration 3
m1
k1
EL +397580
EL +362580
EL +327580
EL +28500
EL +23000
EL +16500
EL +10000EL +5850
EL minus3500
EL minus15500
(a) A real platform (b) The elevation (c) The simplified model
Figure 2 JZ20-2MUQ offshore jacket platform
Viscoelastic material
k1
k2
dgapdgap
c1
c2
Figure 3 Schematic of a SDOF structure controlled by PTMD
32 Dynamic Equations of the System The schematic ofa SDOF structure controlled by PTMD is illustrated inFigure 3 and the motion equation of the system can beexpressed as
[1198981 00 1198982] sdot
11990911199092 + [1198881 + 1198882 minus1198882minus1198882 1198882 ] sdot
11990911199092
+ [1198961 + 1198962 minus1198962minus1198962 1198962 ] sdot 11990911199092
= 119875 sin120596119905 + 119867 (119889) 119865minus119867 (119889) 119865 (1)
where 1198981 and 1198982 are mass of primary structure and PTMDrespectively 1199091 1199091 and 1199091 are acceleration velocity anddisplacement of the primary structure 1199092 1199092 and 1199092 areacceleration velocity and displacement of the PTMD 1198881 and1198882 are stiffness of primary structure and PTMD respectively1198961 and 1198962 are stiffness of primary structure and PTMD
respectively 119865 is the pounding force induced by collisionsbetween mass block and viscoelastic layer 119867(119889) is Havsidfunction
119867(119889) = 1 |119889| minus 119889gap gt 00 otherwise
(2)
where 119889 represents the relative displacement between thePTMDand the primary structure and is calculated by (3)119889gapis the gap between the mass block and the viscoelastic layerHence
119889 = 1199092 minus 1199091 (3)
where 119875 is the amplitude of the external force in order tosimplify the calculation process 119875 = 133 Modeling of Pounding Force
331 Pounding Force Expressions for Two Kinds of ContactGeometries Figure 4(a) is a sketch for a mass block withsphere head pounding to a plane surface which will beutilized later in this paper to simulate vibration performanceof PTMD Figure 4(b) shows that an end plane of thecolumn is pounding to plane which will be calculated as acomparison to discuss influences of contact geometries Thepounding force can be calculated by (4) according to contactmechanics [24]
119865119888 = 43119877121 119864lowast120575321 for sphere to plane119865119888 = 21198771119864lowast1205751 for column to plane
(4)
where 1198771 is the radius of the hemisphere or ending roundplane for column 119877 = 05 meters in this paper 1205751 is
4 Shock and Vibration
Viscoelasticmaterial
Mass block
(a) Sphere to plane (b) Column to plane (c) 3-parameter model
12057511205751
R1R1
2R1
E1
E2
C
Figure 4 Schematic of contact geometries and 3-parameter viscoelastic model
the penetration displacement 119864lowast is the equivalent elasticitymodulus and can be derived by the following expression
1119864lowast =(1 minus 1205992119904 )119864119904 + (1 minus 1205992119901)119864119901 (5)
where 120592119901 120592119904 119864119901 and 119864119904 are Poissonrsquos ratio and modulusof elasticity for polymer and steel respectively In case ofpolymer contact with steel the modulus of elasticity for steelis far larger than polymer and the expression of 119864lowast can besimplified as follows
119864lowast = 1198641199011 minus 1205992119901 (6)
According to the Correspondence Principle of viscoelas-ticity pounding force expressions can be deduced by inverseLaplace transformation from (4) and (6)
119865(119905) = 431198771211 minus 1205992119901 ℓ
minus1 (119876 (119904)119875 (119904) ) 120575321 (119905)for sphere to plane
119865(119905) = 2 11987711 minus 1205992119901 ℓminus1 (119876 (119904)119875 (119904) ) 1205751 (119905)
for column to plane
(7)
For linear viscoelastic materials 119876(119904) and 119875(119904) are poly-nomial of parameter 119904 and they can be calculated automat-ically as a transfer function with different initial values byMATLABSimulink
4 Parametric Study
To obtain optimal parametric settings of PTMD dampingratio of the PTMD gap between mass block and viscoelasticlayer contact geometries and viscoelastic properties arediscussed in this section Unless otherwise indicated con-stitutive parameters of viscoelastic material in this paperare shown in Table 2 And 1198641 1198642 and 1198621 are the springparameters and dash-pot parameter for 3-parameter modelof viscoelastic material in Figure 4(c)
Table 2 Constitutive parameters of the viscoelastic material
1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPa20411198645 20411198645 391198644 1081198645
For comparison performance of an optimal TMD ispresented based on Ioi and Ikedarsquos research [25] in whichoptimal frequency and damping ratio can be expressed as
119891opt = 11 + 120583 minus (0241 + 17120583 minus 261205832) 1205852119904 (8)
120585opt = radic 31205838 (1 + 120583) + (013 + 012120583 + 041205832) 1205852minus (001 + 009120583 + 31205832) 1205852
(9)
where 119891opt and 120585opt are the optimal frequency and dampingratio for the TMD 120583 is mass ratio and 120585119904 is damping ratio ofprimary structure
41 Damping Ratio In order to illustrate the parametersrsquoinfluence more accurately and efficiently the dimensionlessmethod is applied to the data analysis
120575 = 119889gap120575119904 120575119904 = 1198751198961 119891119890 = 1205961205961
(10)
where 119889gap is the gap between mass block and viscoelasticmaterial 120575 is the dimensionless gap and 120575119904 is the staticdisplacement of the primary structure 119875 is the amplitude ofthe sinusoidal wave which is input into the SDOF systemand 1198961 is the structural stiffness of the primary structureThefrequency ratio which is defined as119891119890 is an index of degree forsinusoidal wave deviating from the natural frequency and 120596and 1205961 represent the sinusoidal wave frequency and naturalfrequency of the primary structure respectively
Dynamic amplification factor defined as 119877 in (11) is in-troduced to evaluate the performance of controlling devices
Shock and Vibration 5
In addition the mass ratio is assumed to be 20 which is themost common selection in engineering practice Hence
119877 = 1199091peak120575119904 (11)
where 1199091peak is the peak value of the displacement in steadystate subjected to sinusoidal wave excitationThe dimension-less displacement and acceleration of the primary structurenamed119883 and 119860 respectively can be calculated as follows
119883 = 119909120575119904 119860 =
(12)
where 119909 is the displacement of the primary structure duringthe excitation and 119860 is the second derivative in time of119883
Damping ratio of PTMD defined as 1205852 can be calculatedas
1205852 = 1198882212058311989811205962 (13)
where 1198882 and 1205962 are damping coefficient and circular fre-quency of PTMD1198981 is the mass of the platform and 120583 is themass ratio Thus we can conclude that only in case of 1205852 = 0is PTMD undamped
Figure 5 illustrates the relationship between119877 and119891119890 withdifferent damping ratios in the relative frequency domainIt can be observed from Figure 5(a) that an undampedPTMD has obvious magnification in structure responses Forinstance maximum value of 119877 is 283 for PTMD when 120575 isequal to 2 and it is almost triple those controlled by TMDIn this situation PTMD is not suitable as a vibration controldevice
A damper in vibration control device can effectivelyeliminate magnification effect (1205852 = 0) Figure 5(c) displaysthe performance of PTMD with different gaps when anoptimal damper parameter is applied Although vibrationcontrol performance for PTMD is much better than TMDwhen 119891119890 varies from 09 to 13 there is a significantly inverseeffect on primary structure response for PTMD in case 119891119890 isless than 09 That means the optimal damping ratio whichis based on TMD is no longer applicable to PTMD due topounding effects
From Figures 5(b)ndash5(e) 119877 diminishes with the increasingof damping ratio from 0 to 30120585opt when the gap value is aconstant As 1205852 is 30120585opt PTMD shows a more remarkableperformance compared to TMD Moreover 119877 rises with theincrease of gap in this situation which indicates that impactplayed a positive role in vibration reduction
However Figure 5(f) shows that the structures vibratemore severely in case of 1205852 = 40120585opt than those withthe same gap and 1205852 = 30120585opt Further PTMD shows apoorer performance than TMD when 120575 is equal to 10 In thissituation although an additional damper may enhance theefficiency of PTMD an excessive damping ratio may lead toan opposite effect
From Figures 5(a)ndash5(f) we can obtain an optimal damp-ing ratio for the best performance of PTMD in this case1205852opt = 30120585opt
42 Influences of Gap From an energy viewpoint energy canbe dissipated from the damper in TMD or PTMD as wellas the impact process between mass block and viscoelasticmaterial A small gap in PTMD means that the mass willimpact the viscoelasticmaterial more severely and frequentlyIn an extreme case where the gap is large enough the impactwill not happen and PTMD turns into a traditional TMD
Figure 5 clearly revealed that a sufficient gap is indis-pensable to an undamped PTMD to avoid the adverse effectcaused by the impact To quantify the energy dissipation ofPTMD the root mean square (RMS) of displacement andthe acceleration of the primary structure are defined as in(14) A smaller RMS means more energy will be dissipatedor transformed to dampers Hence
RMS1198831
= radicsum1198991 (1198831119894)2119899 119883119894 = 1198751199091198941198961
(14)
Figure 6 plots the changing trend of RMS1198601
and RMS1198831
along with dimensionless gap In this case 1205852 = 3120585119905 withmassratio 2 and 119899 is the number of values in the time historyrecord
It can be observed from Figure 6 that both of RMS119860 andRMS119883 decrease with the increasing of 120575 and finally tendto be a constant under a low frequency of sinusoidal waveexcitation (where 119891119890 is 07 and 08) Considering that PTMDwill degenerate to TMD when RMS turns to a constantimpact has a negative effect on PTMDrsquos performance in thissituationThatmeans a large gap is required for low frequencyexcitation
However for relatively high frequency excitation with 119891119890higher than 09 both RMS119860 and RMS119883 increase with therising of the dimensionless gap An optimal gap value willavoid the negative effect and maximize the positive effectThis is always needed for PTMD due to the randomnessand variety of earthquakes From Figure 6 the optionaldimensionless gap 120575 is about 2 for offshore jacket platformin this paper
43 Material Properties Properties of the viscoelastic mate-rial layer in PTMD will give different vibration reductionresults It is clear that the material with a higher 119864lowast caninduce a larger pounding force under the same situationwhich may enhance the controlling force and get moremomentum exchanged during an impact Two additionalmaterials named type A and B (shown in Table 3) togetherwith former materials in Table 2 are utilized to investigatethe influence of material properties on PTMDThe results areillustrated in Figure 7
Figure 7(b) shows time history of the dimensionlessdisplacement of the platform controlled by PTMD withdifferent materials in case of 119891119890 = 11 It can be seen in thiscase that a higher equivalent elastic modulus can improvethe controlling performance However in Figure 7(a) whichcorresponds to the case 119891119890 = 085 it is indicated that theequivalent elasticity modulus has an opposite effect which
6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
m1
k1
EL +397580
EL +362580
EL +327580
EL +28500
EL +23000
EL +16500
EL +10000EL +5850
EL minus3500
EL minus15500
(a) A real platform (b) The elevation (c) The simplified model
Figure 2 JZ20-2MUQ offshore jacket platform
Viscoelastic material
k1
k2
dgapdgap
c1
c2
Figure 3 Schematic of a SDOF structure controlled by PTMD
32 Dynamic Equations of the System The schematic ofa SDOF structure controlled by PTMD is illustrated inFigure 3 and the motion equation of the system can beexpressed as
[1198981 00 1198982] sdot
11990911199092 + [1198881 + 1198882 minus1198882minus1198882 1198882 ] sdot
11990911199092
+ [1198961 + 1198962 minus1198962minus1198962 1198962 ] sdot 11990911199092
= 119875 sin120596119905 + 119867 (119889) 119865minus119867 (119889) 119865 (1)
where 1198981 and 1198982 are mass of primary structure and PTMDrespectively 1199091 1199091 and 1199091 are acceleration velocity anddisplacement of the primary structure 1199092 1199092 and 1199092 areacceleration velocity and displacement of the PTMD 1198881 and1198882 are stiffness of primary structure and PTMD respectively1198961 and 1198962 are stiffness of primary structure and PTMD
respectively 119865 is the pounding force induced by collisionsbetween mass block and viscoelastic layer 119867(119889) is Havsidfunction
119867(119889) = 1 |119889| minus 119889gap gt 00 otherwise
(2)
where 119889 represents the relative displacement between thePTMDand the primary structure and is calculated by (3)119889gapis the gap between the mass block and the viscoelastic layerHence
119889 = 1199092 minus 1199091 (3)
where 119875 is the amplitude of the external force in order tosimplify the calculation process 119875 = 133 Modeling of Pounding Force
331 Pounding Force Expressions for Two Kinds of ContactGeometries Figure 4(a) is a sketch for a mass block withsphere head pounding to a plane surface which will beutilized later in this paper to simulate vibration performanceof PTMD Figure 4(b) shows that an end plane of thecolumn is pounding to plane which will be calculated as acomparison to discuss influences of contact geometries Thepounding force can be calculated by (4) according to contactmechanics [24]
119865119888 = 43119877121 119864lowast120575321 for sphere to plane119865119888 = 21198771119864lowast1205751 for column to plane
(4)
where 1198771 is the radius of the hemisphere or ending roundplane for column 119877 = 05 meters in this paper 1205751 is
4 Shock and Vibration
Viscoelasticmaterial
Mass block
(a) Sphere to plane (b) Column to plane (c) 3-parameter model
12057511205751
R1R1
2R1
E1
E2
C
Figure 4 Schematic of contact geometries and 3-parameter viscoelastic model
the penetration displacement 119864lowast is the equivalent elasticitymodulus and can be derived by the following expression
1119864lowast =(1 minus 1205992119904 )119864119904 + (1 minus 1205992119901)119864119901 (5)
where 120592119901 120592119904 119864119901 and 119864119904 are Poissonrsquos ratio and modulusof elasticity for polymer and steel respectively In case ofpolymer contact with steel the modulus of elasticity for steelis far larger than polymer and the expression of 119864lowast can besimplified as follows
119864lowast = 1198641199011 minus 1205992119901 (6)
According to the Correspondence Principle of viscoelas-ticity pounding force expressions can be deduced by inverseLaplace transformation from (4) and (6)
119865(119905) = 431198771211 minus 1205992119901 ℓ
minus1 (119876 (119904)119875 (119904) ) 120575321 (119905)for sphere to plane
119865(119905) = 2 11987711 minus 1205992119901 ℓminus1 (119876 (119904)119875 (119904) ) 1205751 (119905)
for column to plane
(7)
For linear viscoelastic materials 119876(119904) and 119875(119904) are poly-nomial of parameter 119904 and they can be calculated automat-ically as a transfer function with different initial values byMATLABSimulink
4 Parametric Study
To obtain optimal parametric settings of PTMD dampingratio of the PTMD gap between mass block and viscoelasticlayer contact geometries and viscoelastic properties arediscussed in this section Unless otherwise indicated con-stitutive parameters of viscoelastic material in this paperare shown in Table 2 And 1198641 1198642 and 1198621 are the springparameters and dash-pot parameter for 3-parameter modelof viscoelastic material in Figure 4(c)
Table 2 Constitutive parameters of the viscoelastic material
1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPa20411198645 20411198645 391198644 1081198645
For comparison performance of an optimal TMD ispresented based on Ioi and Ikedarsquos research [25] in whichoptimal frequency and damping ratio can be expressed as
119891opt = 11 + 120583 minus (0241 + 17120583 minus 261205832) 1205852119904 (8)
120585opt = radic 31205838 (1 + 120583) + (013 + 012120583 + 041205832) 1205852minus (001 + 009120583 + 31205832) 1205852
(9)
where 119891opt and 120585opt are the optimal frequency and dampingratio for the TMD 120583 is mass ratio and 120585119904 is damping ratio ofprimary structure
41 Damping Ratio In order to illustrate the parametersrsquoinfluence more accurately and efficiently the dimensionlessmethod is applied to the data analysis
120575 = 119889gap120575119904 120575119904 = 1198751198961 119891119890 = 1205961205961
(10)
where 119889gap is the gap between mass block and viscoelasticmaterial 120575 is the dimensionless gap and 120575119904 is the staticdisplacement of the primary structure 119875 is the amplitude ofthe sinusoidal wave which is input into the SDOF systemand 1198961 is the structural stiffness of the primary structureThefrequency ratio which is defined as119891119890 is an index of degree forsinusoidal wave deviating from the natural frequency and 120596and 1205961 represent the sinusoidal wave frequency and naturalfrequency of the primary structure respectively
Dynamic amplification factor defined as 119877 in (11) is in-troduced to evaluate the performance of controlling devices
Shock and Vibration 5
In addition the mass ratio is assumed to be 20 which is themost common selection in engineering practice Hence
119877 = 1199091peak120575119904 (11)
where 1199091peak is the peak value of the displacement in steadystate subjected to sinusoidal wave excitationThe dimension-less displacement and acceleration of the primary structurenamed119883 and 119860 respectively can be calculated as follows
119883 = 119909120575119904 119860 =
(12)
where 119909 is the displacement of the primary structure duringthe excitation and 119860 is the second derivative in time of119883
Damping ratio of PTMD defined as 1205852 can be calculatedas
1205852 = 1198882212058311989811205962 (13)
where 1198882 and 1205962 are damping coefficient and circular fre-quency of PTMD1198981 is the mass of the platform and 120583 is themass ratio Thus we can conclude that only in case of 1205852 = 0is PTMD undamped
Figure 5 illustrates the relationship between119877 and119891119890 withdifferent damping ratios in the relative frequency domainIt can be observed from Figure 5(a) that an undampedPTMD has obvious magnification in structure responses Forinstance maximum value of 119877 is 283 for PTMD when 120575 isequal to 2 and it is almost triple those controlled by TMDIn this situation PTMD is not suitable as a vibration controldevice
A damper in vibration control device can effectivelyeliminate magnification effect (1205852 = 0) Figure 5(c) displaysthe performance of PTMD with different gaps when anoptimal damper parameter is applied Although vibrationcontrol performance for PTMD is much better than TMDwhen 119891119890 varies from 09 to 13 there is a significantly inverseeffect on primary structure response for PTMD in case 119891119890 isless than 09 That means the optimal damping ratio whichis based on TMD is no longer applicable to PTMD due topounding effects
From Figures 5(b)ndash5(e) 119877 diminishes with the increasingof damping ratio from 0 to 30120585opt when the gap value is aconstant As 1205852 is 30120585opt PTMD shows a more remarkableperformance compared to TMD Moreover 119877 rises with theincrease of gap in this situation which indicates that impactplayed a positive role in vibration reduction
However Figure 5(f) shows that the structures vibratemore severely in case of 1205852 = 40120585opt than those withthe same gap and 1205852 = 30120585opt Further PTMD shows apoorer performance than TMD when 120575 is equal to 10 In thissituation although an additional damper may enhance theefficiency of PTMD an excessive damping ratio may lead toan opposite effect
From Figures 5(a)ndash5(f) we can obtain an optimal damp-ing ratio for the best performance of PTMD in this case1205852opt = 30120585opt
42 Influences of Gap From an energy viewpoint energy canbe dissipated from the damper in TMD or PTMD as wellas the impact process between mass block and viscoelasticmaterial A small gap in PTMD means that the mass willimpact the viscoelasticmaterial more severely and frequentlyIn an extreme case where the gap is large enough the impactwill not happen and PTMD turns into a traditional TMD
Figure 5 clearly revealed that a sufficient gap is indis-pensable to an undamped PTMD to avoid the adverse effectcaused by the impact To quantify the energy dissipation ofPTMD the root mean square (RMS) of displacement andthe acceleration of the primary structure are defined as in(14) A smaller RMS means more energy will be dissipatedor transformed to dampers Hence
RMS1198831
= radicsum1198991 (1198831119894)2119899 119883119894 = 1198751199091198941198961
(14)
Figure 6 plots the changing trend of RMS1198601
and RMS1198831
along with dimensionless gap In this case 1205852 = 3120585119905 withmassratio 2 and 119899 is the number of values in the time historyrecord
It can be observed from Figure 6 that both of RMS119860 andRMS119883 decrease with the increasing of 120575 and finally tendto be a constant under a low frequency of sinusoidal waveexcitation (where 119891119890 is 07 and 08) Considering that PTMDwill degenerate to TMD when RMS turns to a constantimpact has a negative effect on PTMDrsquos performance in thissituationThatmeans a large gap is required for low frequencyexcitation
However for relatively high frequency excitation with 119891119890higher than 09 both RMS119860 and RMS119883 increase with therising of the dimensionless gap An optimal gap value willavoid the negative effect and maximize the positive effectThis is always needed for PTMD due to the randomnessand variety of earthquakes From Figure 6 the optionaldimensionless gap 120575 is about 2 for offshore jacket platformin this paper
43 Material Properties Properties of the viscoelastic mate-rial layer in PTMD will give different vibration reductionresults It is clear that the material with a higher 119864lowast caninduce a larger pounding force under the same situationwhich may enhance the controlling force and get moremomentum exchanged during an impact Two additionalmaterials named type A and B (shown in Table 3) togetherwith former materials in Table 2 are utilized to investigatethe influence of material properties on PTMDThe results areillustrated in Figure 7
Figure 7(b) shows time history of the dimensionlessdisplacement of the platform controlled by PTMD withdifferent materials in case of 119891119890 = 11 It can be seen in thiscase that a higher equivalent elastic modulus can improvethe controlling performance However in Figure 7(a) whichcorresponds to the case 119891119890 = 085 it is indicated that theequivalent elasticity modulus has an opposite effect which
6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
Viscoelasticmaterial
Mass block
(a) Sphere to plane (b) Column to plane (c) 3-parameter model
12057511205751
R1R1
2R1
E1
E2
C
Figure 4 Schematic of contact geometries and 3-parameter viscoelastic model
the penetration displacement 119864lowast is the equivalent elasticitymodulus and can be derived by the following expression
1119864lowast =(1 minus 1205992119904 )119864119904 + (1 minus 1205992119901)119864119901 (5)
where 120592119901 120592119904 119864119901 and 119864119904 are Poissonrsquos ratio and modulusof elasticity for polymer and steel respectively In case ofpolymer contact with steel the modulus of elasticity for steelis far larger than polymer and the expression of 119864lowast can besimplified as follows
119864lowast = 1198641199011 minus 1205992119901 (6)
According to the Correspondence Principle of viscoelas-ticity pounding force expressions can be deduced by inverseLaplace transformation from (4) and (6)
119865(119905) = 431198771211 minus 1205992119901 ℓ
minus1 (119876 (119904)119875 (119904) ) 120575321 (119905)for sphere to plane
119865(119905) = 2 11987711 minus 1205992119901 ℓminus1 (119876 (119904)119875 (119904) ) 1205751 (119905)
for column to plane
(7)
For linear viscoelastic materials 119876(119904) and 119875(119904) are poly-nomial of parameter 119904 and they can be calculated automat-ically as a transfer function with different initial values byMATLABSimulink
4 Parametric Study
To obtain optimal parametric settings of PTMD dampingratio of the PTMD gap between mass block and viscoelasticlayer contact geometries and viscoelastic properties arediscussed in this section Unless otherwise indicated con-stitutive parameters of viscoelastic material in this paperare shown in Table 2 And 1198641 1198642 and 1198621 are the springparameters and dash-pot parameter for 3-parameter modelof viscoelastic material in Figure 4(c)
Table 2 Constitutive parameters of the viscoelastic material
1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPa20411198645 20411198645 391198644 1081198645
For comparison performance of an optimal TMD ispresented based on Ioi and Ikedarsquos research [25] in whichoptimal frequency and damping ratio can be expressed as
119891opt = 11 + 120583 minus (0241 + 17120583 minus 261205832) 1205852119904 (8)
120585opt = radic 31205838 (1 + 120583) + (013 + 012120583 + 041205832) 1205852minus (001 + 009120583 + 31205832) 1205852
(9)
where 119891opt and 120585opt are the optimal frequency and dampingratio for the TMD 120583 is mass ratio and 120585119904 is damping ratio ofprimary structure
41 Damping Ratio In order to illustrate the parametersrsquoinfluence more accurately and efficiently the dimensionlessmethod is applied to the data analysis
120575 = 119889gap120575119904 120575119904 = 1198751198961 119891119890 = 1205961205961
(10)
where 119889gap is the gap between mass block and viscoelasticmaterial 120575 is the dimensionless gap and 120575119904 is the staticdisplacement of the primary structure 119875 is the amplitude ofthe sinusoidal wave which is input into the SDOF systemand 1198961 is the structural stiffness of the primary structureThefrequency ratio which is defined as119891119890 is an index of degree forsinusoidal wave deviating from the natural frequency and 120596and 1205961 represent the sinusoidal wave frequency and naturalfrequency of the primary structure respectively
Dynamic amplification factor defined as 119877 in (11) is in-troduced to evaluate the performance of controlling devices
Shock and Vibration 5
In addition the mass ratio is assumed to be 20 which is themost common selection in engineering practice Hence
119877 = 1199091peak120575119904 (11)
where 1199091peak is the peak value of the displacement in steadystate subjected to sinusoidal wave excitationThe dimension-less displacement and acceleration of the primary structurenamed119883 and 119860 respectively can be calculated as follows
119883 = 119909120575119904 119860 =
(12)
where 119909 is the displacement of the primary structure duringthe excitation and 119860 is the second derivative in time of119883
Damping ratio of PTMD defined as 1205852 can be calculatedas
1205852 = 1198882212058311989811205962 (13)
where 1198882 and 1205962 are damping coefficient and circular fre-quency of PTMD1198981 is the mass of the platform and 120583 is themass ratio Thus we can conclude that only in case of 1205852 = 0is PTMD undamped
Figure 5 illustrates the relationship between119877 and119891119890 withdifferent damping ratios in the relative frequency domainIt can be observed from Figure 5(a) that an undampedPTMD has obvious magnification in structure responses Forinstance maximum value of 119877 is 283 for PTMD when 120575 isequal to 2 and it is almost triple those controlled by TMDIn this situation PTMD is not suitable as a vibration controldevice
A damper in vibration control device can effectivelyeliminate magnification effect (1205852 = 0) Figure 5(c) displaysthe performance of PTMD with different gaps when anoptimal damper parameter is applied Although vibrationcontrol performance for PTMD is much better than TMDwhen 119891119890 varies from 09 to 13 there is a significantly inverseeffect on primary structure response for PTMD in case 119891119890 isless than 09 That means the optimal damping ratio whichis based on TMD is no longer applicable to PTMD due topounding effects
From Figures 5(b)ndash5(e) 119877 diminishes with the increasingof damping ratio from 0 to 30120585opt when the gap value is aconstant As 1205852 is 30120585opt PTMD shows a more remarkableperformance compared to TMD Moreover 119877 rises with theincrease of gap in this situation which indicates that impactplayed a positive role in vibration reduction
However Figure 5(f) shows that the structures vibratemore severely in case of 1205852 = 40120585opt than those withthe same gap and 1205852 = 30120585opt Further PTMD shows apoorer performance than TMD when 120575 is equal to 10 In thissituation although an additional damper may enhance theefficiency of PTMD an excessive damping ratio may lead toan opposite effect
From Figures 5(a)ndash5(f) we can obtain an optimal damp-ing ratio for the best performance of PTMD in this case1205852opt = 30120585opt
42 Influences of Gap From an energy viewpoint energy canbe dissipated from the damper in TMD or PTMD as wellas the impact process between mass block and viscoelasticmaterial A small gap in PTMD means that the mass willimpact the viscoelasticmaterial more severely and frequentlyIn an extreme case where the gap is large enough the impactwill not happen and PTMD turns into a traditional TMD
Figure 5 clearly revealed that a sufficient gap is indis-pensable to an undamped PTMD to avoid the adverse effectcaused by the impact To quantify the energy dissipation ofPTMD the root mean square (RMS) of displacement andthe acceleration of the primary structure are defined as in(14) A smaller RMS means more energy will be dissipatedor transformed to dampers Hence
RMS1198831
= radicsum1198991 (1198831119894)2119899 119883119894 = 1198751199091198941198961
(14)
Figure 6 plots the changing trend of RMS1198601
and RMS1198831
along with dimensionless gap In this case 1205852 = 3120585119905 withmassratio 2 and 119899 is the number of values in the time historyrecord
It can be observed from Figure 6 that both of RMS119860 andRMS119883 decrease with the increasing of 120575 and finally tendto be a constant under a low frequency of sinusoidal waveexcitation (where 119891119890 is 07 and 08) Considering that PTMDwill degenerate to TMD when RMS turns to a constantimpact has a negative effect on PTMDrsquos performance in thissituationThatmeans a large gap is required for low frequencyexcitation
However for relatively high frequency excitation with 119891119890higher than 09 both RMS119860 and RMS119883 increase with therising of the dimensionless gap An optimal gap value willavoid the negative effect and maximize the positive effectThis is always needed for PTMD due to the randomnessand variety of earthquakes From Figure 6 the optionaldimensionless gap 120575 is about 2 for offshore jacket platformin this paper
43 Material Properties Properties of the viscoelastic mate-rial layer in PTMD will give different vibration reductionresults It is clear that the material with a higher 119864lowast caninduce a larger pounding force under the same situationwhich may enhance the controlling force and get moremomentum exchanged during an impact Two additionalmaterials named type A and B (shown in Table 3) togetherwith former materials in Table 2 are utilized to investigatethe influence of material properties on PTMDThe results areillustrated in Figure 7
Figure 7(b) shows time history of the dimensionlessdisplacement of the platform controlled by PTMD withdifferent materials in case of 119891119890 = 11 It can be seen in thiscase that a higher equivalent elastic modulus can improvethe controlling performance However in Figure 7(a) whichcorresponds to the case 119891119890 = 085 it is indicated that theequivalent elasticity modulus has an opposite effect which
6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
In addition the mass ratio is assumed to be 20 which is themost common selection in engineering practice Hence
119877 = 1199091peak120575119904 (11)
where 1199091peak is the peak value of the displacement in steadystate subjected to sinusoidal wave excitationThe dimension-less displacement and acceleration of the primary structurenamed119883 and 119860 respectively can be calculated as follows
119883 = 119909120575119904 119860 =
(12)
where 119909 is the displacement of the primary structure duringthe excitation and 119860 is the second derivative in time of119883
Damping ratio of PTMD defined as 1205852 can be calculatedas
1205852 = 1198882212058311989811205962 (13)
where 1198882 and 1205962 are damping coefficient and circular fre-quency of PTMD1198981 is the mass of the platform and 120583 is themass ratio Thus we can conclude that only in case of 1205852 = 0is PTMD undamped
Figure 5 illustrates the relationship between119877 and119891119890 withdifferent damping ratios in the relative frequency domainIt can be observed from Figure 5(a) that an undampedPTMD has obvious magnification in structure responses Forinstance maximum value of 119877 is 283 for PTMD when 120575 isequal to 2 and it is almost triple those controlled by TMDIn this situation PTMD is not suitable as a vibration controldevice
A damper in vibration control device can effectivelyeliminate magnification effect (1205852 = 0) Figure 5(c) displaysthe performance of PTMD with different gaps when anoptimal damper parameter is applied Although vibrationcontrol performance for PTMD is much better than TMDwhen 119891119890 varies from 09 to 13 there is a significantly inverseeffect on primary structure response for PTMD in case 119891119890 isless than 09 That means the optimal damping ratio whichis based on TMD is no longer applicable to PTMD due topounding effects
From Figures 5(b)ndash5(e) 119877 diminishes with the increasingof damping ratio from 0 to 30120585opt when the gap value is aconstant As 1205852 is 30120585opt PTMD shows a more remarkableperformance compared to TMD Moreover 119877 rises with theincrease of gap in this situation which indicates that impactplayed a positive role in vibration reduction
However Figure 5(f) shows that the structures vibratemore severely in case of 1205852 = 40120585opt than those withthe same gap and 1205852 = 30120585opt Further PTMD shows apoorer performance than TMD when 120575 is equal to 10 In thissituation although an additional damper may enhance theefficiency of PTMD an excessive damping ratio may lead toan opposite effect
From Figures 5(a)ndash5(f) we can obtain an optimal damp-ing ratio for the best performance of PTMD in this case1205852opt = 30120585opt
42 Influences of Gap From an energy viewpoint energy canbe dissipated from the damper in TMD or PTMD as wellas the impact process between mass block and viscoelasticmaterial A small gap in PTMD means that the mass willimpact the viscoelasticmaterial more severely and frequentlyIn an extreme case where the gap is large enough the impactwill not happen and PTMD turns into a traditional TMD
Figure 5 clearly revealed that a sufficient gap is indis-pensable to an undamped PTMD to avoid the adverse effectcaused by the impact To quantify the energy dissipation ofPTMD the root mean square (RMS) of displacement andthe acceleration of the primary structure are defined as in(14) A smaller RMS means more energy will be dissipatedor transformed to dampers Hence
RMS1198831
= radicsum1198991 (1198831119894)2119899 119883119894 = 1198751199091198941198961
(14)
Figure 6 plots the changing trend of RMS1198601
and RMS1198831
along with dimensionless gap In this case 1205852 = 3120585119905 withmassratio 2 and 119899 is the number of values in the time historyrecord
It can be observed from Figure 6 that both of RMS119860 andRMS119883 decrease with the increasing of 120575 and finally tendto be a constant under a low frequency of sinusoidal waveexcitation (where 119891119890 is 07 and 08) Considering that PTMDwill degenerate to TMD when RMS turns to a constantimpact has a negative effect on PTMDrsquos performance in thissituationThatmeans a large gap is required for low frequencyexcitation
However for relatively high frequency excitation with 119891119890higher than 09 both RMS119860 and RMS119883 increase with therising of the dimensionless gap An optimal gap value willavoid the negative effect and maximize the positive effectThis is always needed for PTMD due to the randomnessand variety of earthquakes From Figure 6 the optionaldimensionless gap 120575 is about 2 for offshore jacket platformin this paper
43 Material Properties Properties of the viscoelastic mate-rial layer in PTMD will give different vibration reductionresults It is clear that the material with a higher 119864lowast caninduce a larger pounding force under the same situationwhich may enhance the controlling force and get moremomentum exchanged during an impact Two additionalmaterials named type A and B (shown in Table 3) togetherwith former materials in Table 2 are utilized to investigatethe influence of material properties on PTMDThe results areillustrated in Figure 7
Figure 7(b) shows time history of the dimensionlessdisplacement of the platform controlled by PTMD withdifferent materials in case of 119891119890 = 11 It can be seen in thiscase that a higher equivalent elastic modulus can improvethe controlling performance However in Figure 7(a) whichcorresponds to the case 119891119890 = 085 it is indicated that theequivalent elasticity modulus has an opposite effect which
6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
30
25
20
15
10
5
0Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(a) 1205852 = 0120585opt
16
12
14
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(b) 1205852 = 05120585opt12
10
8
6
4
2Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(c) 1205852 = 10120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(d) 1205852 = 20120585opt
7
8
9
6
5
4
3
2
Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(e) 1205852 = 30120585opt
7
8
9
6
5
4
3Dyn
amic
mag
nific
atio
n fa
ctor
R
07 08 09 10 11 12 13
Frequency ratio fe
120575 = 2
120575 = 4
120575 = 6
120575 = 8
120575 = 10TMD (120575 = infin)
(f) 1205852 = 40120585opt
Figure 5 Responses of the controlled structure with different damping ratios
leads to a poorer control result Comparing Figures 7(a) and7(b) we can conclude that a material with high equivalentelasticity modulus can enhance the efficiency when the
excitationrsquos frequency is higher than the natural frequencyof primary structure Otherwise it will weaken the vibrationreduction
Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
6
5
4
3
2
1
RMS
of d
imen
sionl
ess a
ccel
erat
ion
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
RMS A
1
(a) RMS1198831
RMS
of d
imen
sionl
ess d
ispla
cem
ent
RMS X 6
5
4
3
2
1
fe = 07fe = 09fe = 11
fe = 08fe = 10fe = 12
fe = 13
3 6 90 15 18 2112
Dimensionless gap 120575
1
(b) RMS1198601
Figure 6 Primary structure RMS curve along with the change of 120575 (1205852 = 3120585opt 120583 = 2)
Table 3 Parameters of the additional materials
Type ID 1198641Pa 1198642Pa CkNsdot(msdotsminus1) 119864lowastPaA 2041E6 2041E6 39E5 108E6B 2041E7 2041E7 39E6 108E7
44 Contact Geometries As an indispensable part of control-ling force for PTMD pounding force is determined not onlyby material properties but also by the geometry of collidingbodies Figure 8 illustrates the responses of the platformcontrolled by PTMD with two types of contact geometrieswhich were shown in Figures 4(a) and 4(b) For materialscalculated in this paper a better performance can be achievedby a sphere head than by a plane one But differences ofreduction between the two types of contact geometries areno more than 7 for both peak value and RMS For typeA material which is presented in Table 3 there is almost nodifference between the two kinds of geometries It can beconcluded that geometric properties of the contact have alittle effect on the performance of PTMD
5 Robustness of PTMD
Tuning to the natural frequency of primary structure isthe most important purpose for traditional TMD designHowever it is difficult to measure the natural frequencyof the structure accurately The primary structure naturalfrequency for the platform is not a constant due to theoperating environment loads such as depth of water andequipment replacement which will lead to robustness ofPTMD Influences of tuned sinusoidal vibration detuningvibration and free vibration will be investigated here to studythe robustness of PTMD
To quantify the degree of deviation between an optimalfrequency and tuned frequency in TMD and PTMD thedetuning ratio (DTR) is defined as follows
DTR = 119891damper minus 119891opt119891opt sdot 100 (15)
where 119891damper is the frequency of PTMD or TMD and 119891opt isthe optimal frequency which was expressed by (8)
51 Tuned Excitation Vibration The value of frequency074Hz corresponds to minus15 of the detuning ratio and100Hz corresponds to 15 Dimensionless displacement 1198831in steady state can reach as large as 328 for the structurewithout control However for an installed PTMD the max-imum1198831 can be limited below 25 and 34 which correspondto 074Hz and 100Hz In other words 1198831 can be sharplyreduced by 896 and 749 respectively
The simulation results in Figure 9(a) illustrate that PTMDis effective evenwithout tuning which proves its good perfor-mance with robustness Responses with the same detuningratio TMD are presented in Figure 9(b) and the maximumvalue of1198831 can be reduced to 154 and 127 which correspondto reductions of 530 and 613 separately This verifies thatPTMD has superior performance over the traditional TMDin this case
52 Free Vibration Figure 10 shows free vibration responsesof the primary structure when dimensionless initial displace-ment1198831 is equal to 40 It shows that displacement responsesare damped rapidly for both frequencies 074Hz and 100Hzwith PTMD control in Figure 10(a) The peak value of 1198831reduces by 80 in 224 s if a 100Hz PTMD is installed Andwhen it comes to 074Hz the duration time will drop to 15 s
8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(a) 119891119890 = 085
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
Without controlPTMD with A type materialPTMD in this paperPTMD with B type material
minus10
minus5
0
5
10
the p
rimar
y str
uctu
reX
1
(b) 119891119890 = 11
Figure 7 Control performance of PTMD with different types of materials
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(a) Material in this paper and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
Material in this paper
(b) Material in this paper and 119891119890 = 11
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(c) A type material and 119891119890 = 09
Dim
ensio
nles
s disp
lace
men
t of
0 20 40 60 80
Time (s)
minus10
minus5
0
5
10
prim
ary
struc
ture
X1
Without controlPTMD with sphere headPTMD with plane head
A type material
(d) A type material and 119891119890 = 11
Figure 8 Control performance of PTMD with different contact geometries
Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
200 210 220 230 240Time (s)
Without control074Hz TMD100Hz TMD
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
(b) Controlled by TMD
Figure 9 Control performance of TMD and PTMD in tuned excitation vibration
As a comparison the control performance of the TMDwith the same detuning ratio is plotted in Figure 10(b) It willtake 637 s and 613 s to reduce the maximum displacementto 8mm for 074Hz and 100Hz respectively This is nearlythree times as much as PTMD under 074Hz and fourtimes of a 100Hz TMD The simulation result demonstratesthat PTMD can suppress the vibration and dissipate energymore effectively and show excellent adaptability and strongrobustness
53 Detuning Excitation Vibration To evaluate the controlperformance of PTMD under free vibration excitation fourvibration reduction ratios named 1205781198601peakPTMD 120578RMS1198601PTMD1205781198831peakPTMD and 120578RMS1198831PTMD are defined as (16) For TMD1205781198601peakTMD 120578RMS1198601TMD 1205781198831peakTMD and 120578RMS1198831TMD havesimilar definitions
1205781198601peakPTMD = 1198601peakNO minus 1198601peakPTMD1198601peakNO times 1001205781198831peakPTMD = 1198831peakNO minus 1198831peakPTMD1198831peakNO times 100
120578RMS1198601PTMD = RMS1198601NO minus RMS119860
1NO
RMS1198601NO
times 100120578RMS1198831PTMD = RMS119883
1NO minus RMS119883
1NO
RMS1198831NO
times 100(16)
Figure 11 illustrates the relationship between reduction ofpeak value and DTR when the primary structure is appliedby a series of detuning sinusoidal waves From Figures 11(a)to 11(d) we can see that the performance will stay in a desiredlevel and is barely affected by the DTR in case of beingsubjected to uptuned sinusoidal wave excitation (119891119890 ge 1)
In Figure 11(a) PTMD shows an excellent performancewith reduction of about 825 in case of 119891119890 = 1 and onlyhas tiny deterioration with DTR increasing For 119891119890 = 11and 119891119890 = 12 the reductions are almost kept as constantswith reduction values of 505 and 338 respectively Fordowntuned cases (119891119890 lt 1) the values of DTR have significantinfluences on reductions In case of 119891119890 = 09 reductiondecreases sharply from 587 to 23 with DTR changing
10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and VibrationD
imen
sionl
ess d
ispla
cem
ent o
f
0 20 40 60 80
Time (s)
Without control074Hz PTMD100Hz PTMD
minus40
minus20
0
20
40pr
imar
y str
uctu
reX
1
(a) Controlled by PTMD
Dim
ensio
nles
s disp
lace
men
t of
Time (s)
minus40
minus20
0
20
40
prim
ary
struc
ture
X1
Without control074Hz TMD100Hz TMD
0 20 40 60 80
(b) Controlled by TMD
Figure 10 Control performance of PTMD and TMD in free vibration excitation
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakP
TMD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus10 minus5
(a) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X1
peakT
MD()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus15
minus5
(b) Controlled by TMD
minus10
90
75
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578A1
RMS
PTM
D()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15 minus5
minus15
(c) Controlled by PTMD
minus10
60
45
30
15
0
Vibr
atio
n re
duct
ion
ratio
120578X
()
0 5 10 15 20
Detuning ratio DTR ()
fe = 08fe = 09
fe = 11fe = 12
fe = 10
minus20 minus15minus30
minus15
minus5
1RM
STM
D
(d) Controlled by TMD
Figure 11 Control performance of TMD and PTMD in detuning excitation vibration
Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 11
from minus20 to 20 In case of 119891119890 = 08 it will decline from289 to 0 nearly in a linear relationship
From Figure 11(c) vibration reduction of PTMD on RMSof displacement changes from 728 to 820 in case of 119891119890 =10 and varies between 484 and 561 when 119891119890 is equalto 11 This is almost the same as the maximum reductionvalue in Figure 11(a) However PTMD shows a relatively poorperformance with the value of 119891119890 equal to 12 Although thereduction is 302 PTMD rarely works when DTR is minus20in that situation In addition reduction decreases sharplyfrom 572 to minus197 when 119891119890 is equal to 09 which hasa similar tendency in Figure 11(a) In case of 119891119890 = 08reduction is minus as DTR varies from minus15 to 20 Thismeans that PTMD has an adverse effect on vibration controlperformance
Figures 11(b) and 11(d) display control performance ofTMD It can be seen that TMD is effective when the structureis subjected to tuned excitation (119891119890 = 10) especially whenthe TMD is tuned (DTR = 0) However TMDrsquos performanceis not as stable as PTMD subjected to tuned excitation Forinstance the value of 1205781198831peakTMD is 662 for tuned TMDbut only 258 for a downtuned TMD (corresponding toDTR = minus20)
As an improvement of TMD PTMDrsquos seismic vibrationreduction mechanism mainly includes two parts on theone hand controlling force comes from the relative motionbetween mass block and primary structure which is themost important reduction mechanism of a traditional TMDOn the other hand pounding force induced by impact canbe regarded as an extra controlling force just as an impactdamper in which energy can be dissipated during the impactbetween mass block and viscoelastic material When a tunedwave (119891119890 = 1) is input into the system and a sufficientrelative motion can be achieved both PTMD and TMD showsatisfactory reduction results
However reduction of TMD decreases due to dramaticfalling in relative motion when the controlled platform isunder detuning excitation (119891119890 = 1) As evidence shownin Figure 11(c) 1205781198831peakTMD decreases from 6622 to 262as 119891119890 changes from 1 to 11 Unlike TMD PTMD shows asuperior performance even when the structure is subjectedto a detuning wave This is because controlling force fromimpact is considerable and high energy dissipation happensduring the impact process even when the relative motion isvery small As a comparison result in Figure 11(a) the valueof 1205781198831peakPTMD for a tuned PTMD declines from 843 to583 when 119891119890 changes from 1 to 11 For a lager detuningratio of seismic effect (119891119890 = 12) 1205781198831peakPTMD turns to 325compared to 134 for TMD
6 Comparisons between PTMD andTMD with Optimal Parameters
61 Vibration Reduction The variations of reduction re-sponses for PTMD and TMDwhich are subjected to differentfrequency sinusoidal waves are plotted in Figure 12
In terms of acceleration (Figures 12(a) and 12(b)) thetraditional TMD can significantly reduce both of the peak
value and the RMS when the seismic frequency is tuned tothe natural frequency (119891119890 = 1) which can be up to 717and 631 respectively However higher reduction ratiosof 858 and 806 can be achieved by the PTMD whichshows a better control performance than TMD When theseismic effect deviates from the natural frequency of primarystructure (119891119890 = 1) more excellent effects can also be obtainedfor PTMD by an average of 14 higher than TMD on peakacceleration reduction (Figure 12(a))
For RMS of acceleration vibration reduction of TMDratios is minus when 119891119890 varies from 078 to 091 and from109 to 116 (Figure 12(b))Thismeans that theTMDmagnifiesthe vibration responses of the offshore jacket platform and atthis time TMD is not recommended in the primary structureIn contrast PTMD maintains an excellent performancewithin all the range of frequency ratios
In terms of displacement (Figures 12(c) and 12(d)) moresuperior reductions are also achieved by the PTMD Thepeak value and RMS of dimensionless displacement can bereduced by 866 and 845 when 119891119890 = 1 This reduction ishigher than TMDwhose corresponding reductions are 715and 649 Moreover more effective performance has beenobserved with the PTMD in most cases except for 119891119890 thatranges from 07 to 08 for RMS The analysis results illustratethe fact that in almost all cases PTMD is far more effectivethan TMD on vibration control performance
62 Effective Frequency Bandwidth To achieve the best vibra-tion control effect the frequency of sinusoidal wave must belimited to a certain scope when the structure is equippedwith TMD In general vibration control technique oftenfails when the frequency of applied load deviates from thestructure frequency bymore than 10Given the randomnessof earthquake wave this technique has its own limitationsunavoidably To quantify the effective bandwidth of TMDandPTMD 119897119890 is defined as in the following equation
119897119890 = 10038161003816100381610038161198911198901 (1205780) minus 1198911198902 (1205780)1003816100381610038161003816 (17)
where 1205780 is the required control vibration reduction ratioand 1198911198901(1205780) and 1198911198902(1205780) are two responding frequencies 119897119890measures the range of frequencies in which TMD or PTMDcan meet the given requirements And the larger the value of119897119890 is the wider the effective frequency bandwidth is In otherwords a control device with a wider bandwidth ismuchmoreadaptive in seismic control
Figures 13 and 14 illustrate the comparison of effectivebandwidths between PTMDandTMDunder a given require-ment It is clear that PTMD shows a wider bandwidth onacceleration (Figure 13) and displacement (Figure 14) thanTMD for the same required control vibration reduction ratioFurthermore it can be observed from Figure 14 that effectivebandwidth of PTMD expands approximately twice as muchas TMD on RMS displacement
For peak value of displacement shown in Figure 14(a)PTMD still has distinct advantages When the reductionrequirement is 10 peak values of displacement are 067 forPTMD and 047 for TMD This difference is the closest gap
12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Shock and Vibration
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578A1
peak()
TMDPTMD
(a) 1205781198601peak
minus2007 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0
Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198601()
TMDPTMD
(b) 120578RMS1198601
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578X
()
1pe
ak
TMDPTMD
(c) 1205781198831peak
07 08 09 10 11 12 13
Frequency ratio fe
100
80
60
40
20
0Vibr
atio
n re
duct
ion
ratio
120578RM
S 1198831()
TMDPTMD
(d) 120578RMS1198831PTMD
Figure 12 The comparison of 120578 between PTMD and TMD with optimal parameter (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt120583 = 2)
07
06
05
04
03
02
01
0010 20 30 40 50 60 70
Effec
tive b
andw
idth
lA1
peak
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(a) 1198971198601peak
03
02
01
00
Effec
tive b
andw
idth
lA1
RMS
10 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
PTMD controlTMD control
(b) 1198971198601RMS
Figure 13 Comparison of effective bandwidth on dimensionless acceleration
Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 13
PTMD controlTMD control
05
04
03
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
peak
(a) 1198971198831peak
PTMD controlTMD control
03
04
05
06
02
01
0010 20 30 40 50 60 70
Required control vibration reduction ratio 1205780 ()
Effec
tive b
andw
idth
lX1
RMS
(b) 1198971198831RMS
Figure 14 Comparison of effective bandwidth on dimensionless displacement
07 08 09 10 11 12 13
Frequency ratio fe
55
50
40
30
20
10
Max
imum
dim
ensio
nles
s disp
lace
men
tof
the m
ass b
lock
X2
peak
TMDPTMD
(a) 1198832peak
07 08 09 10 11 12 13
Frequency ratio fe
50
40
30
20
10
0
Relat
ive d
ispla
cem
entΔ
TMDPTMD
(b) Δ
Figure 15 Response of the mass block and relative displacement (PTMD 1205852 = 3120585opt 120575 = 2 and 120583 = 2 TMD 1205852 = 3120585opt 120583 = 2)
between the devices among others Otherwise PTMDmakesnearly double the reduction that TMD does
In terms of acceleration PTMD has superior per-formance over the traditional TMD both in peak value(Figure 14(a)) and in the RMS (Figure 14(b)) When the goalfor peak value of displacement is 70 the bandwidth is only0032 which means TMD only allows the seismic effect todeviate by 16 from the tuned sinusoidal wave since thereduction is almost center symmetry by119891119890 = 1 (Figure 12) Inother words the device is almost useless since it is practicallyimpossible for the structure subjected to a tuned seismiceffect But for PTMD the bandwidth is 0122 Even for alower requirement like 30 values of 1198971198601peak are 0347 and0174 for PTMD and TMD respectively In terms of 1198971198831peakthey are 0330 and 0179 for PTMD and TMD respectivelyThe bandwidth results indicate that PTMD can be applied todifferent earthquake patterns
63 Costs and Installing Space A superpower continuousworking damper needs to be equipped for TMD due to thelarge mass of block and continuous movement Except forhigh cost a huge space for installing is a primary need toachieve satisfying control effects
Figure 15(a) presents the peak value of the dimensionlessdisplacement of the mass block under different excitationsThe maximum of the value for TMD can be as large as 503while it is only 124 for PTMD The value of TMD decreasesrapidly but it is smaller in the frequency domain for PTMDTherefore the movement of the mass block is significantlyreduced due to the limiter and this means that the cost ofadditional dampers can be drastically discarded
The relative displacement is defined as Δ in the followingequation
Δ = 10038161003816100381610038161198831 minus 11988321003816100381610038161003816max (18)
14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

14 Shock and Vibration
where 1198831 and 1198832 are dimensionless displacement values forprimary structure and mass block respectively Δ representsthe minimum space requirement for installing Figure 15(b)illustrates the relationship between Δ of different controllingtechniques It can be observed that at least the minimumvalue of dimensionless space is 428 which must be providedto TMD for motion But for PTMD the value is 59 which isonly 137 of TMD
7 Conclusion
A SDOF structure simplified from JZ20-2MUQ type offshorejacket platform is taken as an example to investigate theseismic control performance and robustness of PTMD Thefollowing conclusions can be obtained
(1) Damping ratio is extremely important for PTMDAlthough an additional damper will enhance theefficiency of PTMD an exceeding damping ratio mayhave the opposite effect And the optimal dampingratio which is based on TMD is no longer applicablefor PTMD due to the impact effect The optimaldamping ratio value for PTMD is about three timesthat of the TMD in this paper
(2) The gap between the mass block and the viscoelasticlayer is another key factor for vibration reductionSince impact may have adverse influences on the con-trol performance when the platform is subjected tolow frequency excitation an appropriate gap shouldbe reserved
(3) Control performance of PTMD is sensitive to prop-erties of material A material with higher equivalentelasticity modulus can enhance the efficiency whenthe excitation frequency is higher than the naturalfrequency of primary structure Otherwise it willweaken the vibration reduction But contact geome-tries have little effect on PTMDrsquos vibration reduction
(4) Tuned excitation vibration detuning vibration andfree vibration are present to investigate the robustnessof PTMDThe simulation results showmore excellentvibration mitigation in all cases compared to TMDComparison between PTMD and traditional TMDverifies the advantages of PTMDnot only in vibrationsuppression and costs but also in effective frequencybandwidth
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (Projects nos 51678322 and 51409056)the Natural Science Foundation of Heilongjiang Province(E2015047 E2015045) the Fundamental Research Funds forthe Central Universities (HEUCF160202) and the Taishan
Scholar Priority Discipline Talent Group program funded byShandong Province
References
[1] S Chandrasekaran A K Jain and N R Chandak ldquoSeismicanalysis of offshore triangular tension leg platformsrdquo Interna-tional Journal of Structural Stability and Dynamics vol 6 no 1pp 97ndash120 2006
[2] A Ajamy M R Zolfaghari B Asgarian and C E VenturaldquoProbabilistic seismic analysis of offshore platforms incorpo-rating uncertainty in soil-pile-structure interactionsrdquo Journal ofConstructional Steel Research vol 101 pp 265ndash279 2014
[3] K Kawano K Furukawa and K Venkataramana ldquoSeismicresponse of offshore platform with TMDrdquo in Proceedings of the10th World Conference on Earthquake Engineering pp 2241ndash2246 Balkema Rotterdam 1992
[4] Q Wu X Zhao R Zheng and K Minagawa ldquoHigh responseperformance of a tuned-mass damper for vibration suppressionof offshore platform under earthquake loadsrdquo Shock and Vibra-tion vol 2016 Article ID 7383679 11 pages 2016
[5] J L Almazan J C De la Llera J A Inaudi D Lopez-Garciaand L E Izquierdo ldquoA bidirectional and homogeneous tunedmass damper a new device for passive control of vibrationsrdquoEngineering Structures vol 29 no 7 pp 1548ndash1560 2007
[6] M-H Chey J G Chase J B Mander and A J Carr ldquoSemi-active tuned mass damper building systems designrdquo Earth-quake Engineering and Structural Dynamics vol 39 no 2 pp119ndash139 2010
[7] C Sun and S Nagarajaiah ldquoStudy on semi-active tuned massdamper with variable damping and stiffness under seismicexcitationsrdquo Structural Control and Health Monitoring vol 21no 6 pp 890ndash906 2014
[8] A JafarabadM KashaniM R A Parvar andA A GolafshanildquoHybrid damping systems in offshore jacket platforms withfloat-over deckrdquo Journal of Constructional Steel Research vol 98pp 178ndash187 2014
[9] M Mohebbi H Rasouli and S Moradpour ldquoAssessment of thedesign criteria effect on performance of multiple tuned massdampersrdquo Advances in Structural Engineering vol 18 no 8 pp1141ndash1158 2015
[10] L-S Huo and H-N Li ldquoTorsionally coupled response controlof offshore platform structures using circular tuned liquidcolumn dampersrdquo China Ocean Engineering vol 18 no 2 pp173ndash183 2004
[11] H-N Li X-Y He and L-S Huo ldquoSeismic response con-trol of offshore platform structures with shape memory alloydampersrdquo China Ocean Engineering vol 19 no 2 pp 185ndash1942005
[12] J Ou X LongQ S Li andYQXiao ldquoVibration control of steeljacket offshore platform structures with damping isolationsystemsrdquo Engineering Structures vol 29 no 7 pp 1525ndash15382007
[13] Y Komachi M R Tabeshpour A A Golafshani and I MuallaldquoRetrofit of Ressalat jacket platform (Persian Gulf) using fric-tion damper devicerdquo Journal of Zhejiang University Science Avol 12 no 9 pp 680ndash691 2011
[14] S A Mousavi S M Zahrai and K Bargi ldquoOptimum geometryof tuned liquid column-gas damper for control of offshorejacket platform vibrations under seismic excitationrdquo Earth-quake Engineering and Engineering Vibration vol 11 no 4 pp579ndash592 2012
Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 15
[15] S A Mousavi K Bargi and S M Zahrai ldquoOptimum param-eters of tuned liquid columngas damper for mitigation ofseismic-induced vibrations of offshore jacket platformsrdquo Struc-tural Control and HealthMonitoring vol 20 no 3 pp 422ndash4442013
[16] A Sarrafan S H Zareh A A A Khayyat and A ZabihollahldquoNeuro-fuzzy control strategy for an offshore steel jacket plat-form subjected to wave-induced forces using magnetorheologi-cal dampersrdquo Journal of Mechanical Science and Technology vol26 no 4 pp 1179ndash1196 2012
[17] M A Lotfollahi-Yaghin H Ahmadi and H Tafakhor ldquoSeismicresponses of an offshore jacket-type platform incorporated withtuned liquid dampersrdquo Advances in Structural Engineering vol19 no 2 pp 227ndash238 2016
[18] P Zhang G Song H-N Li and Y-X Lin ldquoSeismic controlof power transmission tower using pounding TMDrdquo Journal ofEngineering Mechanics vol 139 no 10 pp 1395ndash1406 2013
[19] H Li P Zhang G Song D Patil and Y Mo ldquoRobustness studyof the pounding tuned mass damper for vibration control ofsubsea jumpersrdquo Smart Materials and Structures vol 24 no 9pp 135ndash142 2015
[20] L Li G Song M Singla and Y-L Mo ldquoVibration controlof a traffic signal pole using a pounding tuned mass damperwith viscoelastic materials (II) experimental verificationrdquoJVCJournal of Vibration and Control vol 21 no 4 pp 670ndash6752015
[21] G Song P Zhang L Li et al ldquoVibration control of a pipelinestructure using pounding tuned mass damperrdquo Journal ofEngineeringMechanics vol 142 no 6 Article ID 04016031 2016
[22] P Zhang L Li D Patil et al ldquoParametric study of poundingtuned mass damper for subsea jumpersrdquo Smart Materials ampStructures vol 25 no 1 Article ID 015028 2016
[23] J P Ou X Long Y Q Xiao and B Wu ldquoDamping isolationsystem and its vibration-suppressed effectiveness analysis foroffshore platform jacket structuresrdquo Earthquake Engineeringand Engineering Vibration vol 6 no 1 pp 115ndash122 2002
[24] Q Xue C Zhang J He G Zou and J Zhang ldquoAn updated ana-lytical structural pounding force model based on viscoelasticityofmaterialsrdquo Shock andVibration vol 2016 Article ID 259692315 pages 2016
[25] T Ioi and K Ikeda ldquoOn the houde damper for a damped vibra-tion systemrdquo Bulletin of the JSME vol 23 no 176 pp 273ndash2791980
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of