Embed Size (px)
Citation preview
m
odel :
serial n.:
supply :
1
°F
2
3
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
AT
W
SERIESQD
ASCON spa
4
5
PID
INSTRUCCIONES PARA EL USOINSTRUCTION MANUALM.I.U. QD - 1/96.05Cód. J30 - 304 - 1AQD-IE
Regulador de procesoDual loop, Multientrada,Multisalidas, Multifunciones
Serie QD
Dual Loop Process ControllerMulti-input, Multi-outputMulti-functions
Series QD
1
18
172116 2516 26 27 28
2916 3316 34 35 36
5 6 7 5 8 9 5 10 11
1718 19
1619
16
22 23 24
30 31 32
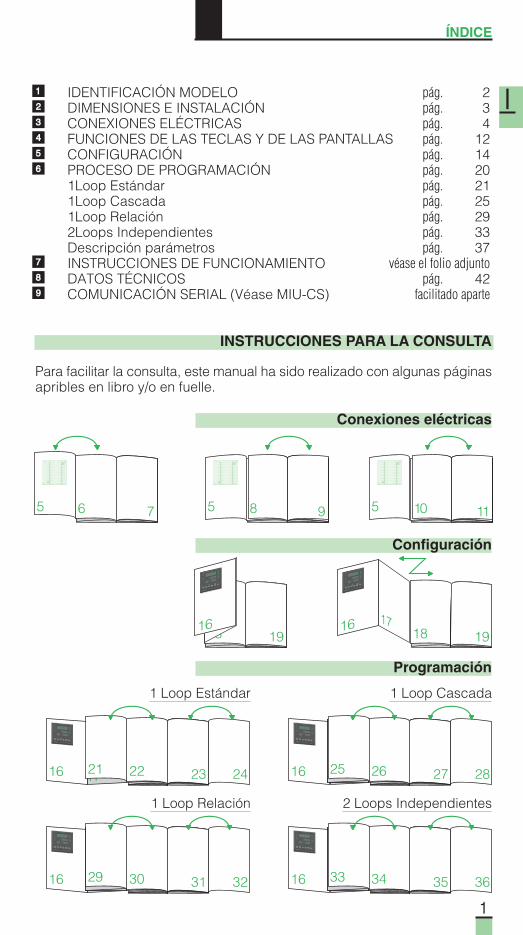
1 IDENTIFICACIÓN MODELO pág. 22 DIMENSIONES E INSTALACIÓN pág. 33 CONEXIONES ELÉCTRICAS pág. 44 FUNCIONES DE LAS TECLAS Y DE LAS PANTALLAS pág. 125 CONFIGURACIÓN pág. 146 PROCESO DE PROGRAMACIÓN pág. 20
1Loop Estándar pág. 211Loop Cascada pág. 251Loop Relación pág. 292Loops Independientes pág. 33Descripción parámetros pág. 37
7 INSTRUCCIONES DE FUNCIONAMIENTO véase el folio adjunto8 DATOS TÉCNICOS pág. 429 COMUNICACIÓN SERIAL (Véase MIU-CS) facilitado aparte
ÍNDICE
I
INSTRUCCIONES PARA LA CONSULTA
Para facilitar la consulta, este manual ha sido realizado con algunas páginasapribles en libro y/o en fuelle.
Conexiones eléctricas
Configuración
Programación
1 Loop Estándar 1 Loop Cascada
1 Loop Relación 2 Loops Independientes

1
2
Q D - 3 0 0 0
m
odel :
serial n.:
supply :
1
°F
2
3
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
AT
W 4
5
PID
Código modelo: QD A B C0
Alimentación
Comunicación serial RS 485
Salida analógica auxiliar Y6
IDENTIFICACIÓN MODELO
I Gracias por haber elegido un regulador ASCON.
Los instrumentos pertenecientes a la serie QD son reguladores con dosloops de regulación son configurables como 1 loop, cascada, relación, o2 loops independientes.Son universales, muy potentes pero fáciles de usar.Están equipados con AUTO-TUNE para ayudar en la puesta en servicio delequipo y con comunicación serial para su inserción en una red de controldistribuido.Están completos ya que comprenden todas las variantes posibles.Al configurar el instrumento se puede determinar el modo de funcionamientodependiendo de la aplicación requerida.
1.1 Sigla del modelo
Código modelo : QD A B C 0
100…240V 50/60 Hz 316…28V 50/60 Hz y 20…30V dc 5
No prevista 0RS485 Modbus - Jbus 3
No prevista 00/4…20mA, 0/1…5V, 0…10V 1
A
B
C
Alimentación
Comunicación serial (opción)
Salida auxiliar Y6 (opción)
2
3
154,5
91,5
96
96
92+0.8
112,5
135
m
odel :
serial n.:
supply :
1
°F
2
3
4
5
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
AT
RUN
HLD
W
SG
PID
SERIESQD
1
°F
2
3
4
5
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
AT
RUN
HLD
W
SG
PID
SERIESQF
%
HR%
mV
V
A
kW
psi
Bar
°F
MPa
l/m
m3/h
Nm3/h
CO%
O2%
m
rh
Pa
kPa
mA
°C
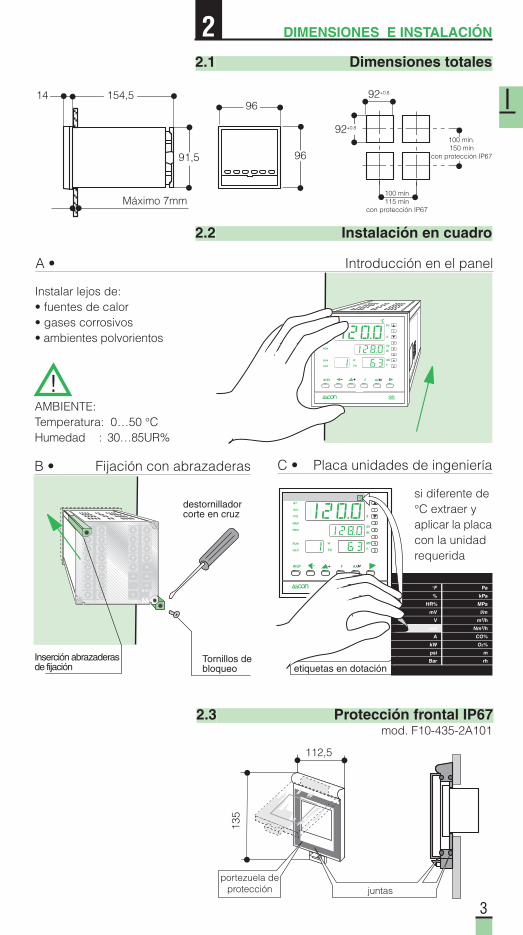
DIMENSIONES E INSTALACIÓN
portezuela deprotección juntas
2.1 Dimensiones totales
2.2 Instalación en cuadro
2.3 Protección frontal IP67
14 92+0.8
B • Fijación con abrazaderas
A • Introducción en el panel
C • Placa unidades de ingeniería
100 mín.150 mín
con protección IP67
100 mín115 mín
con protección IP67Máximo 7mm
Tornillos debloqueo
Inserción abrazaderasde fijación
AMBIENTE:Temperatura: 0…50 °CHumedad : 30…85UR%
Instalar lejos de:• fuentes de calor• gases corrosivos• ambientes polvorientos
si diferente de°C extraer yaplicar la placacon la unidadrequerida
etiquetas en dotación
destornilladorcorte en cruz
mod. F10-435-2A101
I I
3
4
A1
A2
A3
A4
A5
A6
A7
B1
B2
B3
B4
B5
C1
C2
C3
C4
C5
C6
C7
C8
D2
D3
D4
D5
D6
D7
D8
max.6 max.6
7
BB A C
E D
CA
C
D
E
B
B6
B7
B8
Canal alimentación y salidas
Canal para conductores de señales a bajo nivel
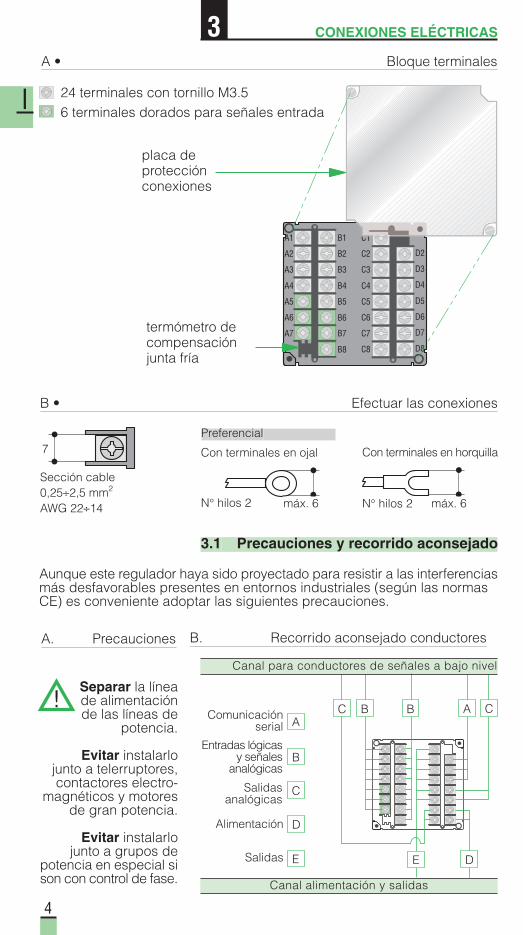
Con terminales en horquilla
Separar la líneade alimentaciónde las líneas de
potencia.
Evitar instalarlojunto a telerruptores,contactores electro-
magnéticos y motoresde gran potencia.
Evitar instalarlojunto a grupos de
potencia en especial sison con control de fase.
CONEXIONES ELÉCTRICAS
A • Bloque terminales
B • Efectuar las conexiones
3.1 Precauciones y recorrido aconsejado
A. Precauciones B. Recorrido aconsejado conductores
Preferencial
24 terminales con tornillo M3.56 terminales dorados para señales entrada
termómetro decompensaciónjunta fría
placa deprotecciónconexiones
N° hilos 2 N° hilos 2
Con terminales en ojal
Sección cable0,25÷2,5 mm2
AWG 22÷14
Aunque este regulador haya sido proyectado para resistir a las interferenciasmás desfavorables presentes en entornos industriales (según las normasCE) es conveniente adoptar las siguientes precauciones.
Comunicaciónserial
Salidasanalógicas
Alimentación
Salidas
Entradas lógicasy señales
analógicas
I I
máx. 6 máx. 6
3
5
24V
A1
A2
A3
A4
A5
A6
A7
B1
B2
B3
B4
B5
W R
EMIN
PUT
1
DIGI
TAL
INPU
TS
mA/V TC
3
2
1C1
C2
C3
C4
C5
C6
C7
D2
D3
D4
D5
D6
D7
D8
OUTP
UTS
RS48
5PO
WER
C8
Y1C
C
N
LV
OUT
Y6
Y3
Y2
Y1/YA/Y5
0%
100%
5•
3•
2•
4•6•
1•
6•
8•
D7
D8
N
LV
7•
B6
B7
B8
INPU
T 2
mA/V TC
Y1/YB/Y4
A6
A7 B7
B8
X1
X2
2•
9•
CONEXIONES ELÉCTRICAS
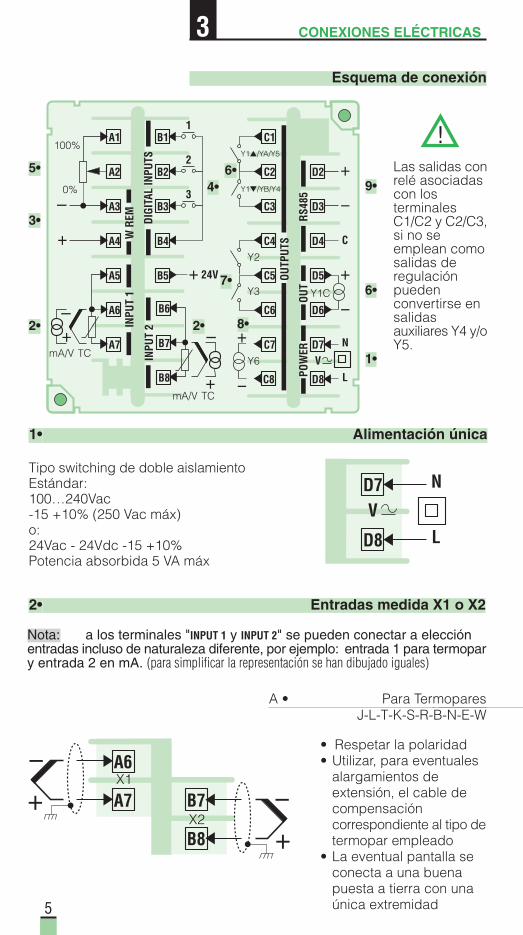
Tipo switching de doble aislamientoEstándar:100…240Vac-15 +10% (250 Vac máx)o:24Vac - 24Vdc -15 +10%Potencia absorbida 5 VA máx
A • Para Termopares J-L-T-K-S-R-B-N-E-W
• Respetar la polaridad• Utilizar, para eventuales
alargamientos deextensión, el cable decompensacióncorrespondiente al tipo determopar empleado
• La eventual pantalla seconecta a una buenapuesta a tierra con unaúnica extremidad
Esquema de conexión
1• Alimentación única
2• Entradas medida X1 o X2
Las salidas conrelé asociadascon losterminalesC1/C2 y C2/C3,si no seemplean comosalidas deregulaciónpuedenconvertirse ensalidasauxiliares Y4 y/oY5.
Nota: a los terminales "INPUT 1 y INPUT 2" se pueden conectar a elecciónentradas incluso de naturaleza diferente, por ejemplo: entrada 1 para termopary entrada 2 en mA. (para simplificar la representación se han dibujado iguales)
3
6
A5
A6
A7X1
B6
B7
B8X2
B
A
B B
A
B
A6
A7mA, mV, V X1
B7
B8X2 mA, mV, V
RJ
RJ
A6
A7X1
B5
B7
B8X2
RJ
RJ
mA mA
X1
X2
A6
A7X1
B5
B7
B8X2
RJ
RJ
mA mA
X1
X2
+24V
+24V
CONEXIONES ELÉCTRICAS
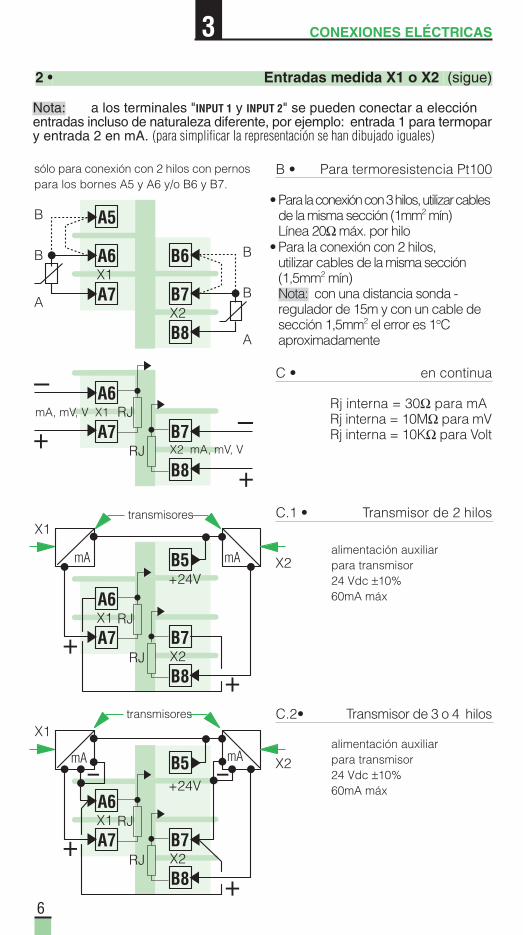
•Para la conexión con 3 hilos, utilizar cablesde la misma sección (1mm2 mín)Línea 20Ω máx. por hilo
•Para la conexión con 2 hilos,utilizar cables de la misma sección(1,5mm2 mín)
Nota: con una distancia sonda -regulador de 15m y con un cable desección 1,5mm2 el error es 1°Caproximadamente
B • Para termoresistencia Pt100
C.1 • Transmisor de 2 hilos
alimentación auxiliarpara transmisor24 Vdc ±10%60mA máx
C • en continua
C.2• Transmisor de 3 o 4 hilos
alimentación auxiliarpara transmisor24 Vdc ±10%60mA máx
sólo para conexión con 2 hilos con pernospara los bornes A5 y A6 y/o B6 y B7.
Rj interna = 30Ω para mARj interna = 10MΩ para mVRj interna = 10KΩ para Volt
transmisores
2 • Entradas medida X1 o X2 (sigue)
transmisores
Nota: a los terminales "INPUT 1 y INPUT 2" se pueden conectar a elecciónentradas incluso de naturaleza diferente, por ejemplo: entrada 1 para termopary entrada 2 en mA. (para simplificar la representación se han dibujado iguales)
3
7
A3
A4
Rj
B1
B2
B3
B4
C3
C2
C1
com.
A1
A2
A3
0%
100%
0%
100%
pot.I
pot.h
CONEXIONES ELÉCTRICAS
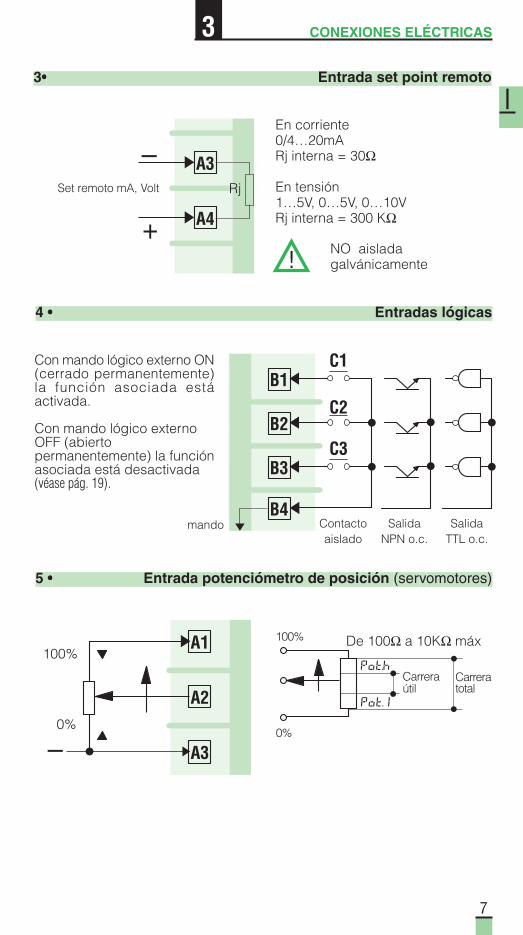
IEn corriente0/4…20mARj interna = 30Ω
En tensión1…5V, 0…5V, 0…10VRj interna = 300 KΩ
NO aisladagalvánicamente
Con mando lógico externo ON(cerrado permanentemente)la función asociada estáactivada.
Con mando lógico externoOFF (abiertopermanentemente) la funciónasociada está desactivada(véase pág. 19).
De 100Ω a 10KΩ máx
Carreraútil
Carreratotal
Set remoto mA, Volt
Contactoaislado
SalidaNPN o.c.
SalidaTTL o.c.
3• Entrada set point remoto
4 • Entradas lógicas
5 • Entrada potenciómetro de posición (servomotores)
mando
3
8
C1
C2
V
C1
C2
C3
VM
D5
D6
V
D5
D6
Y1 Y1C
Y1
Y1
Y1C
C1
C2
C3
V
C1
C2V
D5
D6V
Y1
Y1
Y1 Y1C
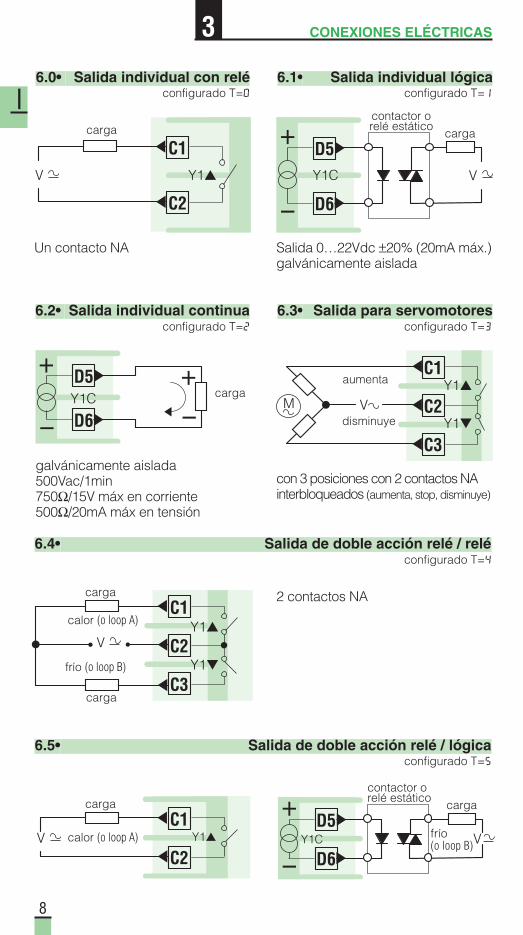
CONEXIONES ELÉCTRICAS
carga
aumenta
disminuye
con 3 posiciones con 2 contactos NAinterbloqueados (aumenta, stop, disminuye)
carga
contactor orelé estático
Salida 0…22Vdc ±20% (20mA máx.)galvánicamente aislada
carga
galvánicamente aislada500Vac/1min750Ω/15V máx en corriente500Ω/20mA máx en tensión
configurado T=0 configurado T=1
configurado T=2 configurado T=3
6.4• Salida de doble acción relé / relé
carga
calor (o loop A)
6.5• Salida de doble acción relé / lógica
carga
frío (o loop B)
carga
carga
contactor orelé estático
configurado T=4
Un contacto NA
2 contactos NA
I
6.3• Salida para servomotores
6.0• Salida individual con relé 6.1• Salida individual lógica
6.2• Salida individual continua
calor (o loop A) frío(o loop B)
configurado T=5
3
9
Y1
Y1V
Y1V
D5
D6
D5
D6V
D5
D6V
C7
C8
D5
D6
D5
D6V
C7
C8
C1
C2V
C2
C3
Y1C
Y1C
Y6 Y1C
C2
C3Y1C
Y6 Y1C
CONEXIONES ELÉCTRICAS
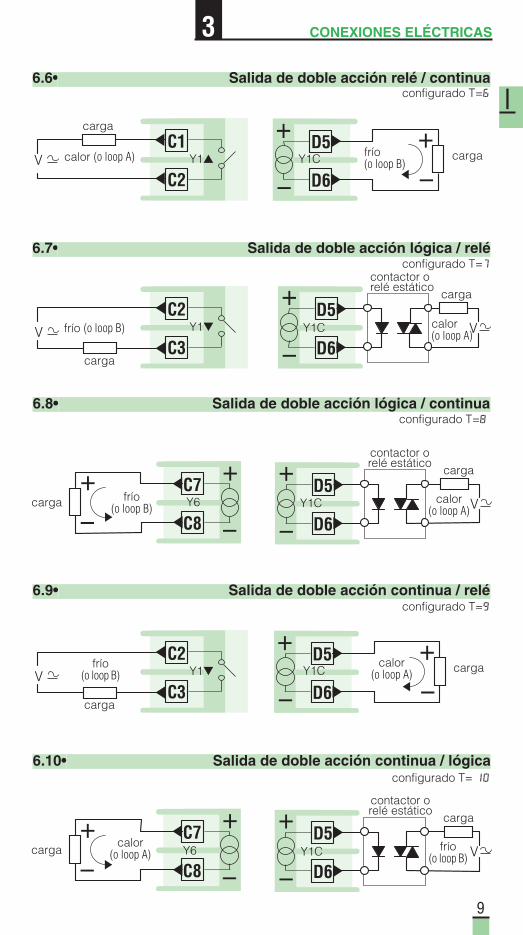
6.6• Salida de doble acción relé / continua
6.7• Salida de doble acción lógica / relé
6.8• Salida de doble acción lógica / continua
cargafrío(o loop B)
carga
contactor orelé estático
carga
contactor orelé estático
carga
6.9• Salida de doble acción continua / relé
6.10• Salida de doble acción continua / lógica
carga
carga
contactor orelé estático
carga
configurado T=6
configurado T=7
configurado T=8
configurado T=9
configurado T= 10
I
carga
carga
carga
calor (o loop A)
frío (o loop B) calor(o loop A)
frío(o loop B)
calor(o loop A)
calor(o loop A)
frío(o loop B)
calor(o loop A)
frío(o loop B)
3
10
D5
D6
C7
C8Y6 Y1C
D5
D6V
D5
D6
C1
C2
C3
V
C1
C2
C3
V
M
M
CONEXIONES ELÉCTRICAS
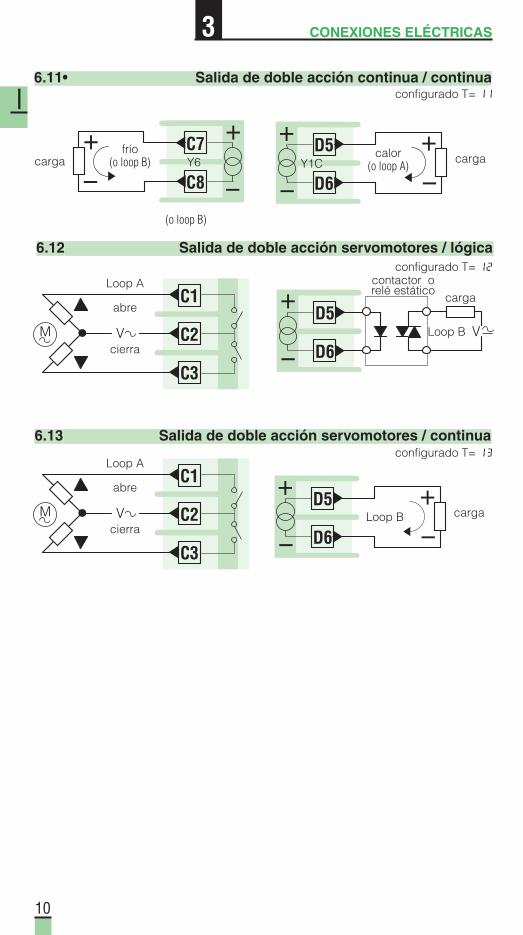
6.11• Salida de doble acción continua / continua
cargafrío
(o loop B)carga
configurado T= 11I
6.12 Salida de doble acción servomotores / lógica
6.13 Salida de doble acción servomotores / continua
(o loop B)
calor(o loop A)
carga
contactor orelé estático
abre
cierra
abre
cierracarga
configurado T= 12
configurado T= 13
Loop B
Loop B
Loop A
Loop A
3
11
Y2
Y3
C7
C8Y6
D2
D3
D4
C4
C5
C6
V
Y5
Y4
C1
C2
C3
V
CONEXIONES ELÉCTRICAS
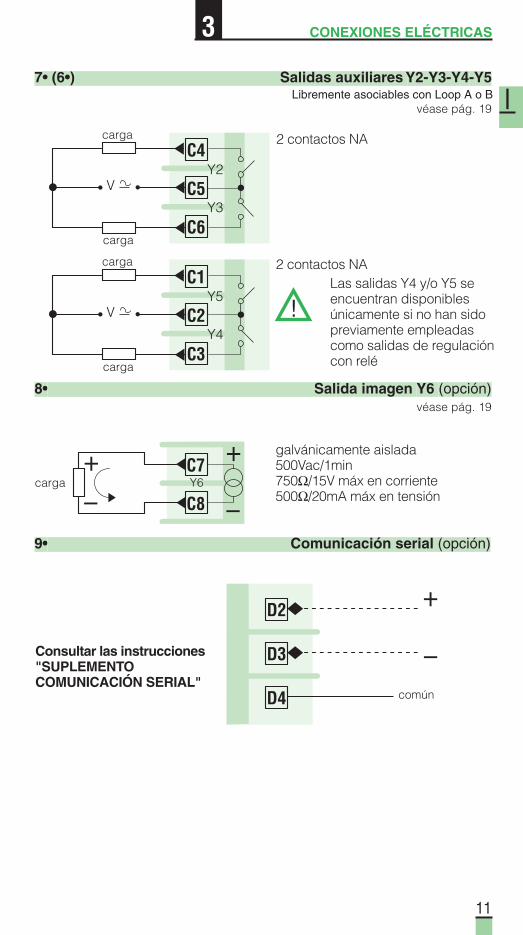
I7• (6•) Salidas auxiliares Y2-Y3-Y4-Y5
véase pág. 19
8• Salida imagen Y6 (opción)véase pág. 19
9• Comunicación serial (opción)
Consultar las instrucciones"SUPLEMENTOCOMUNICACIÓN SERIAL"
carga
carga
carga
común
carga
carga
2 contactos NA
Las salidas Y4 y/o Y5 seencuentran disponiblesúnicamente si no han sidopreviamente empleadascomo salidas de regulacióncon relé
Libremente asociables con Loop A o B
2 contactos NA
galvánicamente aislada500Vac/1min750Ω/15V máx en corriente500Ω/20mA máx en tensión
REM
W/SV
MAN
SCI
AT
W
PDI
1,2,3a.
b.
MA
sl
E.U
C
yr
yp
4
12
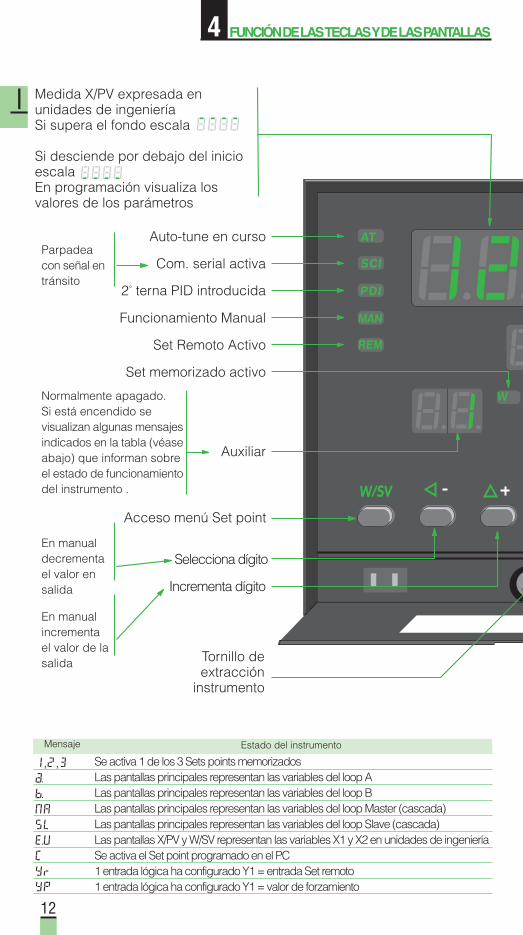
FUNCIÓN DE LAS TECLAS Y DE LAS PANTALLAS
Medida X/PV expresada enunidades de ingenieríaSi supera el fondo escala
Si desciende por debajo del inicioescalaEn programación visualiza losvalores de los parámetros
Auto-tune en curso
Com. serial activa
Funcionamiento Manual
Set Remoto Activo
Set memorizado activo
Auxiliar
Acceso menú Set point
Selecciona dígito
Incrementa dígito
Tornillo deextracción
instrumento
Parpadeacon señal entránsito
Normalmente apagado.Si está encendido sevisualizan algunas mensajesindicados en la tabla (véaseabajo) que informan sobreel estado de funcionamientodel instrumento .
En manualdecrementael valor ensalida
En manualincrementael valor de lasalida
2° terna PID introducida
Se activa 1 de los 3 Sets points memorizadosLas pantallas principales representan las variables del loop ALas pantallas principales representan las variables del loop BLas pantallas principales representan las variables del loop Master (cascada)Las pantallas principales representan las variables del loop Slave (cascada)Las pantallas X/PV y W/SV representan las variables X1 y X2 en unidades de ingenieríaSe activa el Set point programado en el PC1 entrada lógica ha configurado Y1 = entrada Set remoto1 entrada lógica ha configurado Y1 = valor de forzamiento
Mensaje Estado del instrumento
II
1
°F
2
3
°C
Y
WSV
X
PV
F A/M
MVW 4
5
13
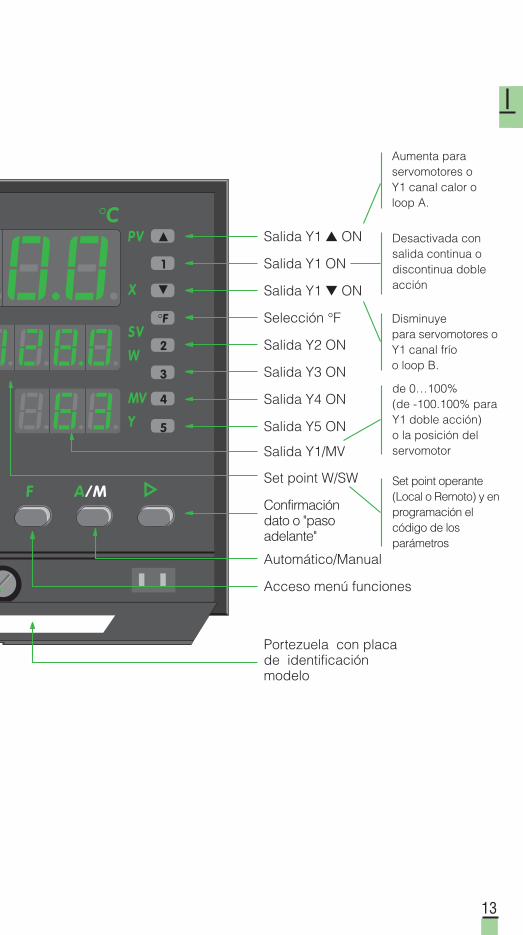
Salida Y1 ON
Salida Y1 ON
Salida Y1 ON
Selección °F
Salida Y2 ON
Salida Y3 ON
Portezuela con placade identificaciónmodelo
Salida Y1/MV
Confirmacióndato o "pasoadelante"
Automático/Manual
Acceso menú funciones
Set point W/SW
Aumenta paraservomotores oY1 canal calor oloop A.
Desactivada consalida continua odiscontinua dobleacción
Disminuyepara servomotores oY1 canal fríoo loop B.
de 0…100%(de -100.100% paraY1 doble acción)o la posición delservomotor
Set point operante(Local o Remoto) y enprogramación elcódigo de losparámetros
Salida Y4 ON
Salida Y5 ON
II
X
Zs.p.t.SX
ZtuneX
Zpar.SX
ZConf.X
ZAddr.SX
Q3333L
Qnot
ZConf.
Q0036
ZtaGS
OK
< +
<+
X
>
>
ZtaGS>
ZC.Con.
>
ZC.u.y6>
ZEndS>
ZpAss.
14
5
Funcionamientonormal
CONFIGURACIÓN
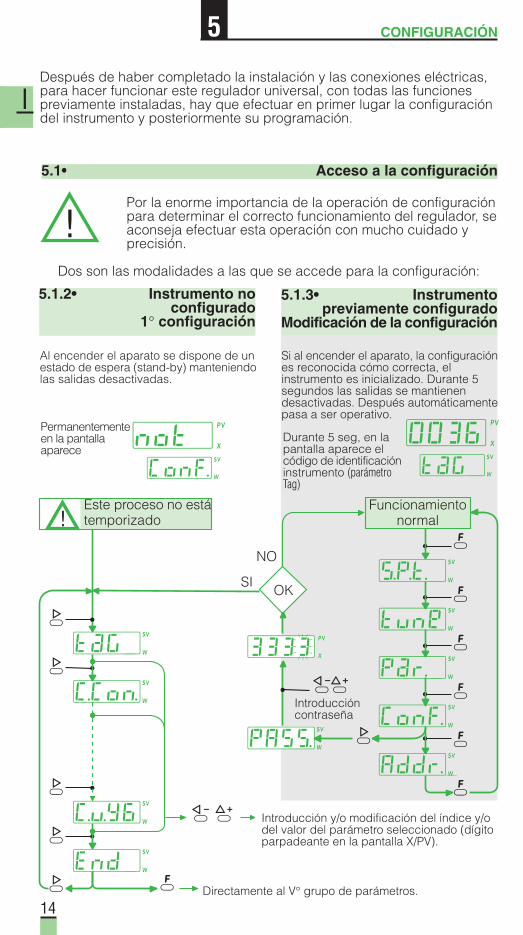
Al encender el aparato se dispone de unestado de espera (stand-by) manteniendolas salidas desactivadas.
5.1• Acceso a la configuración
Después de haber completado la instalación y las conexiones eléctricas,para hacer funcionar este regulador universal, con todas las funcionespreviamente instaladas, hay que efectuar en primer lugar la configuracióndel instrumento y posteriormente su programación.
Por la enorme importancia de la operación de configuraciónpara determinar el correcto funcionamiento del regulador, seaconseja efectuar esta operación con mucho cuidado yprecisión.
Dos son las modalidades a las que se accede para la configuración:
5.1.2• Instrumento noconfigurado
1° configuración
5.1.3• Instrumentopreviamente configurado
Modificación de la configuración
Permanentementeen la pantallaaparece
Durante 5 seg, en lapantalla aparece elcódigo de identificacióninstrumento (parámetroTag)
Introduccióncontraseña
Introducción y/o modificación del índice y/odel valor del parámetro seleccionado (dígitoparpadeante en la pantalla X/PV).
Si al encender el aparato, la configuraciónes reconocida cómo correcta, elinstrumento es inicializado. Durante 5segundos las salidas se mantienendesactivadas. Después automáticamentepasa a ser operativo.
SI
NO
Directamente al V° grupo de parámetros.
Este proceso no estátemporizado
II
1
°F
2
3
4
5
°C
Y
W
SV
X
PVREM
F
W/SV
A/M
MV
MAN
SCI
RUN
HLD
W
SG
PID
m
odel :
serial n.:
supply :
1
°F
2
3
4
5
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
RUN
HLD
W
SG
PID
1
°F
2
3
4
5
°C
Y
W
SV
X
PVREM
F
W/SV
A/M
MV
MAN
SCI
RUN
HLD
W
SG
PID
m
odel :
serial n.:
supply :
1
°F
2
3
4
5
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
RUN
HLD
W
SG
PID
5
15
CONFIGURACIÓN
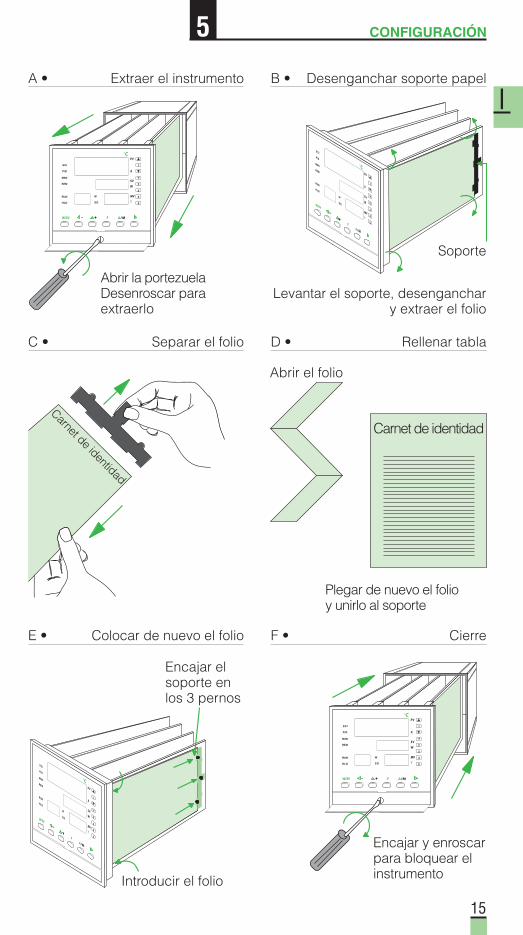
A • Extraer el instrumento B • Desenganchar soporte papel
Abrir la portezuelaDesenroscar paraextraerlo
Soporte
Levantar el soporte, desenganchary extraer el folio
Encajar y enroscarpara bloquear elinstrumento
C • Separar el folio D • Rellenar tabla
Carnet de identidad
E • Colocar de nuevo el folio F • Cierre
Carnet de identidad
Abrir el folio
Plegar de nuevo el folioy unirlo al soporte
Introducir el folio
Encajar elsoporte enlos 3 pernos
I
SERIESQD
>
>
>
>
>
4
5
PID
1
°F
2
3
°C
Y
WSV
X
PV
REM
FW/SV A/M
MV
MAN
SCI
AT
W
16
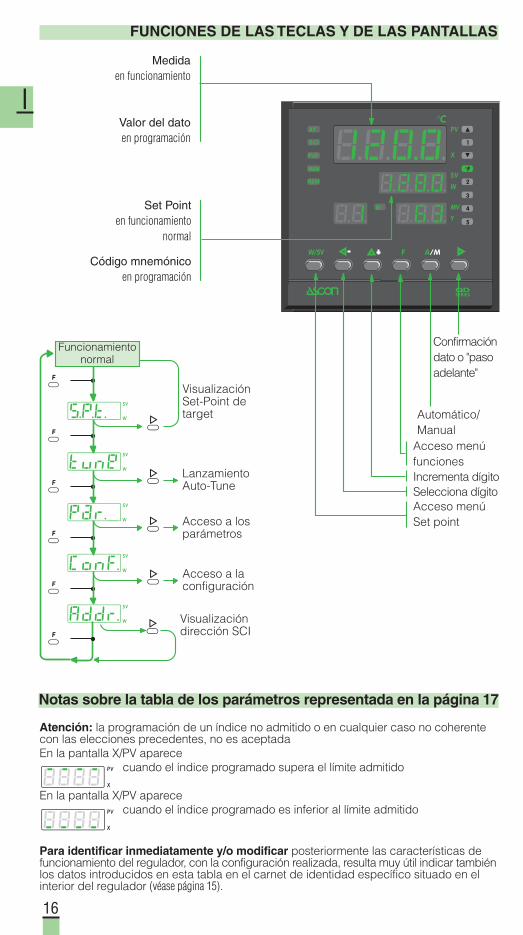
LanzamientoAuto-Tune
Acceso a losparámetros
Acceso a laconfiguración
Visualizacióndirección SCI
VisualizaciónSet-Point detarget
Funcionamientonormal
Confirmacióndato o "pasoadelante"
Automático/Manual
Acceso menúfunciones
Acceso menúSet point
Selecciona dígitoIncrementa dígito
Medidaen funcionamiento
Valor del datoen programación
Set Pointen funcionamiento
normal
Código mnemónicoen programación
FUNCIONES DE LAS TECLAS Y DE LAS PANTALLAS
Atención: la programación de un índice no admitido o en cualquier caso no coherentecon las elecciones precedentes, no es aceptadaEn la pantalla X/PV aparece
cuando el índice programado supera el límite admitido
En la pantalla X/PV aparececuando el índice programado es inferior al límite admitido
Para identificar inmediatamente y/o modificar posteriormente las características defuncionamiento del regulador, con la configuración realizada, resulta muy útil indicar tambiénlos datos introducidos en esta tabla en el carnet de identidad específico situado en elinterior del regulador (véase página 15).
Notas sobre la tabla de los parámetros representada en la página 17
I
ABCDEFGHKIJLMNOPQRSTUVWXYZ*
QtaGS
QC.Con.
QC.Ss.p.
QC.In.1
QC. sc.
QC. C.j.
QC. d.d.
QC. Io.
QC. hi.
QC.In.2
QC.sc.2
QC.C.j.2
QC.d.d.2
QC.Io.2
QC.hi.2
QC.l.i.I
QC.l.i.2
QC.l.i.3
QC.In.r.
QC. y1
QC.u.y1
QC. y2
QC. y3
QC. y4
QC. y5
QC. y6
QC.u.y6
QEnd
QConf.
>
>
>
5
17
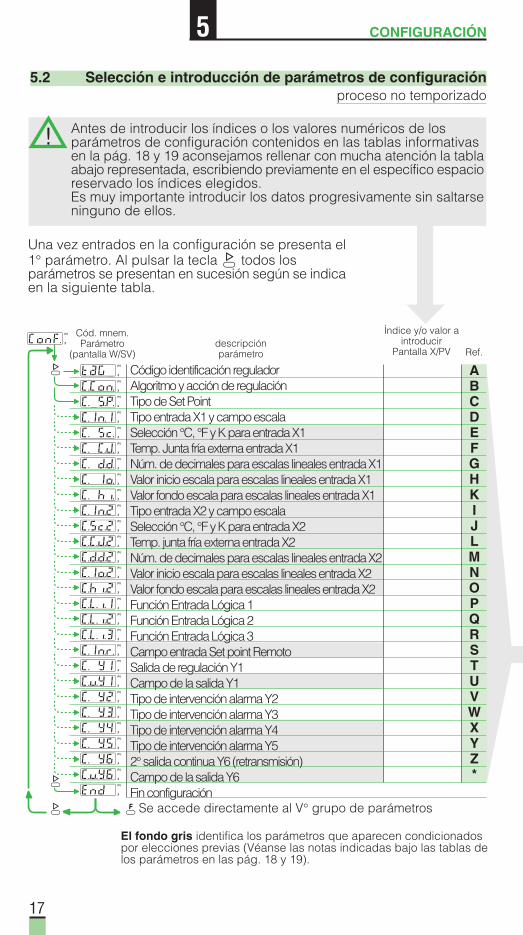
El fondo gris identifica los parámetros que aparecen condicionadospor elecciones previas (Véanse las notas indicadas bajo las tablas delos parámetros en las pág. 18 y 19).
CONFIGURACIÓN
5.2 Selección e introducción de parámetros de configuraciónproceso no temporizado
Antes de introducir los índices o los valores numéricos de losparámetros de configuración contenidos en las tablas informativasen la pág. 18 y 19 aconsejamos rellenar con mucha atención la tablaabajo representada, escribiendo previamente en el específico espacioreservado los índices elegidos.Es muy importante introducir los datos progresivamente sin saltarseninguno de ellos.
Una vez entrados en la configuración se presenta el1° parámetro. Al pulsar la tecla > todos losparámetros se presentan en sucesión según se indicaen la siguiente tabla.
Código identificación reguladorAlgoritmo y acción de regulaciónTipo de Set PointTipo entrada X1 y campo escalaSelección °C, °F y K para entrada X1Temp. Junta fría externa entrada X1Núm. de decimales para escalas lineales entrada X1Valor inicio escala para escalas lineales entrada X1Valor fondo escala para escalas lineales entrada X1Tipo entrada X2 y campo escalaSelección °C, °F y K para entrada X2Temp. junta fría externa entrada X2Núm. de decimales para escalas lineales entrada X2Valor inicio escala para escalas lineales entrada X2Valor fondo escala para escalas lineales entrada X2Función Entrada Lógica 1Función Entrada Lógica 2Función Entrada Lógica 3Campo entrada Set point RemotoSalida de regulación Y1Campo de la salida Y1Tipo de intervención alarma Y2Tipo de intervención alarma Y3Tipo de intervención alarma Y4Tipo de intervención alarma Y52° salida continua Y6 (retransmisión)Campo de la salida Y6Fin configuración
Cód. mnem.Parámetro
(pantalla W/SV)descripciónparámetro
Índice y/o valor aintroducir
Pantalla X/PV Ref.
Se accede directamente al V° grupo de parámetrosX
0
1
2
3
4
ZC. d.d.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
< +
0
1
2
3
GM
B
D-IA
ZC.Con.
ZC.In.1ZtaGS
ZC. 5.p.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
ZC.In.2
ZC.d.d.2
0
1
2
3
4
5
E
J
ZC. 5c. ZC.5c.2
C
°C°FK°C°FK
5
18
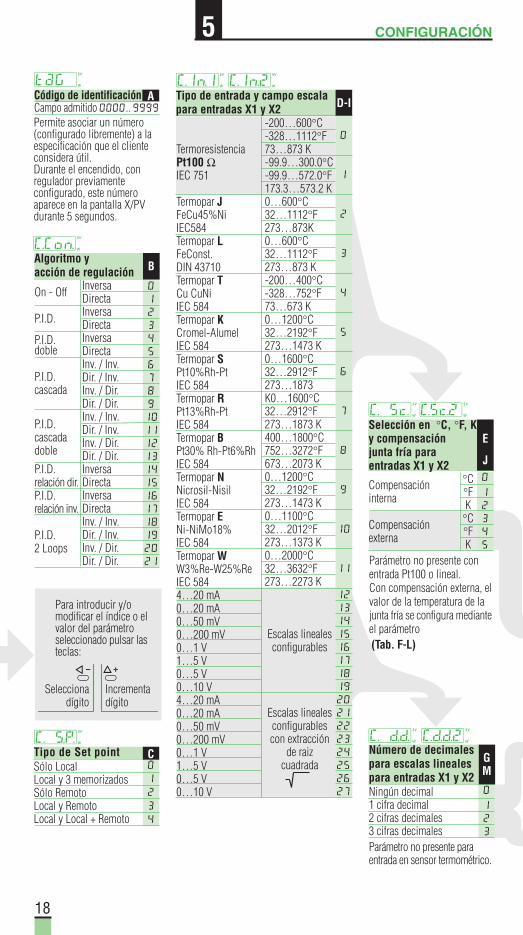
Tipo de Set pointSólo LocalLocal y 3 memorizadosSólo RemotoLocal y RemotoLocal y Local + Remoto
Número de decimalespara escalas linealespara entradas X1 y X2
On - Off
P.I.D.
P.I.D.doble
P.I.D.cascada
P.I.D.cascadadoble
P.I.D.relación dir.P.I.D.relación inv.
P.I.D.2 Loops
InversaDirectaInversaDirectaInversaDirectaInv. / Inv.Dir. / Inv.Inv. / Dir.Dir. / Dir.Inv. / Inv.Dir. / Inv.Inv. / Dir.Dir. / Dir.InversaDirectaInversaDirectaInv. / Inv.Dir. / Inv.Inv. / Dir.Dir. / Dir.
CONFIGURACIÓN
Algoritmo yacción de regulación
Tipo de entrada y campo escalapara entradas X1 y X2
Ningún decimal1 cifra decimal2 cifras decimales3 cifras decimalesParámetro no presente paraentrada en sensor termométrico.
Campo admitido 0000.. 9999Código de identificación
Permite asociar un número(configurado libremente) a laespecificación que el clienteconsidera útil.Durante el encendido, conregulador previamenteconfigurado, este númeroaparece en la pantalla X/PVdurante 5 segundos.
Para introducir y/omodificar el índice o elvalor del parámetroseleccionado pulsar lasteclas:
Incrementadígito
Seleccionadígito
TermoresistenciaPt100 ΩIEC 751
Termopar JFeCu45%NiIEC584Termopar LFeConst.DIN 43710Termopar TCu CuNiIEC 584Termopar KCromel-AlumelIEC 584Termopar SPt10%Rh-PtIEC 584Termopar RPt13%Rh-PtIEC 584Termopar BPt30% Rh-Pt6%RhIEC 584Termopar NNicrosil-NisilIEC 584Termopar ENi-NiMo18%IEC 584Termopar WW3%Re-W25%ReIEC 5844…20 mA0…20 mA0…50 mV0…200 mV0…1 V1…5 V0…5 V0…10 V4…20 mA0…20 mA0…50 mV0…200 mV0…1 V1…5 V0…5 V0…10 V
-200…600°C-328…1112°F73…873 K-99.9…300.0°C-99.9…572.0°F173.3…573.2 K0…600°C32…1112°F273…873K0…600°C32…1112°F273…873 K-200…400°C-328…752°F73…673 K0…1200°C32…2192°F273…1473 K0…1600°C32…2912°F273…1873K0…1600°C32…2912°F273…1873 K400…1800°C752…3272°F673…2073 K0…1200°C32…2192°F273…1473 K0…1100°C32…2012°F273…1373 K0…2000°C32…3632°F273…2273 K
Escalas linealesconfigurables
Escalas linealesconfigurablescon extracción
de raizcuadrada
Selección en °C, °F, Ky compensaciónjunta fría paraentradas X1 y X2
Compensacióninterna
Compensaciónexterna
Parámetro no presente conentrada Pt100 o lineal.Con compensación externa, elvalor de la temperatura de lajunta fría se configura medianteel parámetro (Tab. F-L)
ZC. y2 ZC. y3
ZC. Io.
ZCShi.
ZC.u.y.1
ZC. y6
ZC.u.y6
*0
1
2
3
4
0
1
2
3
4
5
6
Z
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ZC.Io.2
ZChi2
FL
ZC. C.j. ZC.C.j.2
ZC. y4 ZC. y5
KO
HN
V-WX-Y
ZC.l.i.1 ZC.l.i.3ZC.l.i.2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
T
0
1
2
3
4
S
0
1
2
3
4
5
6
7
8
9
10
11
P-QR
ZC. y1
ZC.1n.r.
0
1
2
3
4
U
0 …. 50°C32 …. 122°F273 …. 323 K
4…20 mA0…20 mA1…5 V0…5 V0…10 V
4…20 mA0…20 mA1…5 V0…5 V0…10 V
0…1
2…3
4…11
19
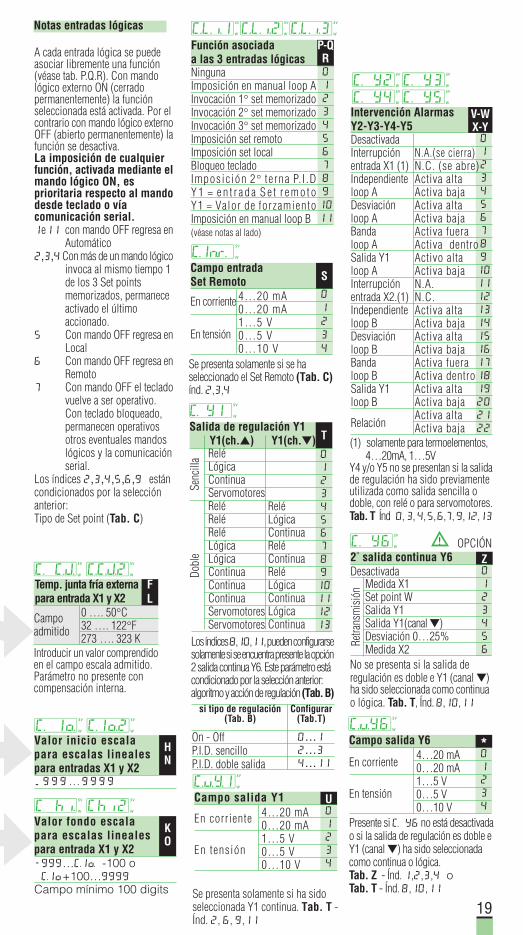
Intervención AlarmasY2-Y3-Y4-Y5
A cada entrada lógica se puedeasociar libremente una función(véase tab. P.Q.R). Con mandológico externo ON (cerradopermanentemente) la funciónseleccionada está activada. Por elcontrario con mando lógico externoOFF (abierto permanentemente) lafunción se desactiva.La imposición de cualquierfunción, activada mediante elmando lógico ON, esprioritaria respecto al mandodesde teclado o víacomunicación serial.1e11 con mando OFF regresa en
Automático2,3,4 Con más de un mando lógico
invoca al mismo tiempo 1de los 3 Set pointsmemorizados, permaneceactivado el últimoaccionado.
5 Con mando OFF regresa enLocal
6 Con mando OFF regresa enRemoto
7 Con mando OFF el tecladovuelve a ser operativo.Con teclado bloqueado,permanecen operativosotros eventuales mandoslógicos y la comunicaciónserial.
Los índices 2,3,4,5,6,9 estáncondicionados por la selecciónanterior:Tipo de Set point (Tab. C)
Valor fondo escalapara escalas linealespara entrada X1 y X2
-999…9999
Valor inicio escalapara escalas linealespara entradas X1 y X2
=999…C.1o. -100 o C.1o+100…9999
Campo mínimo 100 digits
N.A.(se cierra)N.C. (se abre)Activa altaActiva bajaActiva altaActiva bajaActiva fueraActiva dentroActivo altaActiva bajaN.A.N.C.Activa altaActiva bajaActiva altaActiva bajaActiva fueraActiva dentroActiva altaActiva bajaActiva altaActiva baja
DesactivadaInterrupciónentrada X1 (1)Independienteloop ADesviaciónloop ABandaloop ASalida Y1loop AInterrupciónentrada X2.(1)Independienteloop BDesviaciónloop BBandaloop BSalida Y1loop B
Relación
OPCIÓN2° salida continua Y6
Retra
nsm
isión
Medida X1Set point WSalida Y1Salida Y1(canal )Desviación 0…25%Medida X2
Desactivada
No se presenta si la salida deregulación es doble e Y1 (canal )ha sido seleccionada como continuao lógica. Tab. T, Índ. 8,10,11
Campo salida Y6
En corriente
En tensión
Presente si C. y6 no está desactivadao si la salida de regulación es doble eY1 (canal ) ha sido seleccionadacomo continua o lógica.Tab. Z - Índ. 1,2,3,4 oTab. T - Índ. 8,10,11
Notas entradas lógicas
(1) solamente para termoelementos,4…20mA, 1…5V
Y4 y/o Y5 no se presentan si la salidade regulación ha sido previamenteutilizada como salida sencilla odoble, con relé o para servomotores.Tab. T Índ. 0, 3, 4, 5, 6,7, 9,12,13
Temp. junta fría externapara entrada X1 y X2
Campoadmitido
Introducir un valor comprendidoen el campo escala admitido.Parámetro no presente concompensación interna.
NingunaImposición en manual loop AInvocación 1° set memorizadoInvocación 2° set memorizadoInvocación 3° set memorizadoImposición set remotoImposición set localBloqueo tecladoImposic ión 2° t e rna P. I .DY 1 = e n t r a d a S e t r e m o t oY1 = Valor de forzamientoImposición en manual loop B(véase notas al lado)
Función asociadaa las 3 entradas lógicas
ReléLógicaContinuaReléContinuaReléLógicaContinuaLógicaContinua
Salida de regulación Y1 Y1(ch.) Y1(ch.)
ReléLógicaContinuaServomotoresReléReléReléLógicaLógicaContinuaContinuaContinuaServomotoresServomotores
Senc
illa
Dobl
e
Campo entradaSet Remoto
En corriente
En tensión
Los índices 8,10,11, pueden configurarsesolamente si se encuentra presente la opción2 salida continua Y6. Este parámetro estácondicionado por la selección anterior:algoritmo y acción de regulación (Tab. B)
Campo salida Y14…20 mA0…20 mA1…5 V0…5 V0…10 V
En corriente
En tensión
Se presenta solamente si ha sidoseleccionada Y1 continua. Tab. T -Índ. 2, 6, 9,11
Se presenta solamente si se haseleccionado el Set Remoto (Tab. C)índ. 2,3,4
si tipo de regulación(Tab. B)
Configurar(Tab.T)
On - OffP.I.D. sencilloP.I.D. doble salida
20
6
X
Zs.p.t.S
X
Ztune
X
Zpar.S
X
ZConf.
X
ZAddr.
X
>
>
>
>
>
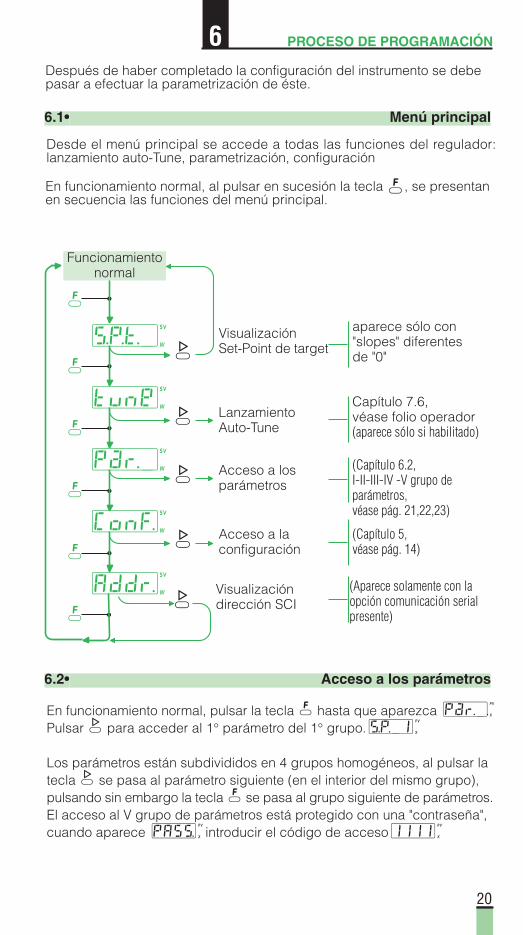
6.1• Menú principal
6.2• Acceso a los parámetros
Desde el menú principal se accede a todas las funciones del regulador:lanzamiento auto-Tune, parametrización, configuración
En funcionamiento normal, al pulsar en sucesión la tecla X, se presentanen secuencia las funciones del menú principal.
LanzamientoAuto-Tune
Acceso a losparámetros
Acceso a laconfiguración
Visualizacióndirección SCI
VisualizaciónSet-Point de target
Capítulo 7.6,véase folio operador(aparece sólo si habilitado)
(Capítulo 6.2,I-II-III-IV -V grupo deparámetros,véase pág. 21,22,23)
(Capítulo 5,véase pág. 14)
(Aparece solamente con laopción comunicación serialpresente)
aparece sólo con"slopes" diferentesde "0"
Después de haber completado la configuración del instrumento se debepasar a efectuar la parametrización de éste.
En funcionamiento normal, pulsar la tecla X hasta que aparezca Qpar.S.Pulsar > para acceder al 1° parámetro del 1° grupo. Qs.p.SI
Los parámetros están subdivididos en 4 grupos homogéneos, al pulsar latecla > se pasa al parámetro siguiente (en el interior del mismo grupo),pulsando sin embargo la tecla X se pasa al grupo siguiente de parámetros.El acceso al V grupo de parámetros está protegido con una "contraseña",cuando aparece QpAss. introducir el código de acceso Q1111
Funcionamientonormal
PROCESO DE PROGRAMACIÓN
21
>
PSS10
Zs.p.S1
> PSS20
Zs.p.S2
> PSS30
Zs.p.S3
> PSS0:0
ZsI. u.
> PSS0:0
ZsI. d.
>
PS300
Zy2s.p.
> PS0:50
Zy2Hy.
> PS300
Zy35.p.
> PS0:50
Zy3Hy.
> PS300
Zy4s.p.
> PS0:50
Zy4Hy.
> PS300
Zy55.p.
> PS0:50
Zy5Hy.
>
XQpar.
Qsp. 1
Qsp. 2
Qsp. 3
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp.l.h.
Qsp.l.1.
QsI. u.
QsI. d.
Qp.b.
Qt.i.
Qt.d.
< +
Qy.5I.u.
Qy.5I.d.
Qr.c.r.
Qyh.
QyI.
Qyh.
Qyh. C.
Qd.b.
WTW1
X1
YPID+FY
Y1
1°2° Set PID
LOCEXT
AM
X1
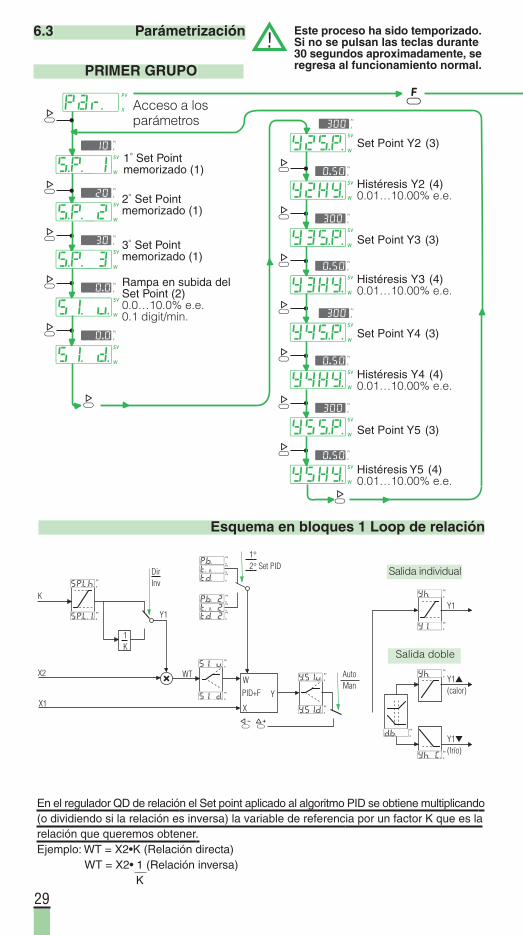
1° Set point memorizado(1)
2° Set point memorizado(1)
Rampa en subidadel Set point(2)0.0…10.0% c.s.0.1 digit/min.
3° Set point memorizado(1)
Rampa en bajardel Set point(2)0.0…10.0% c.s.0.1 digit/min.
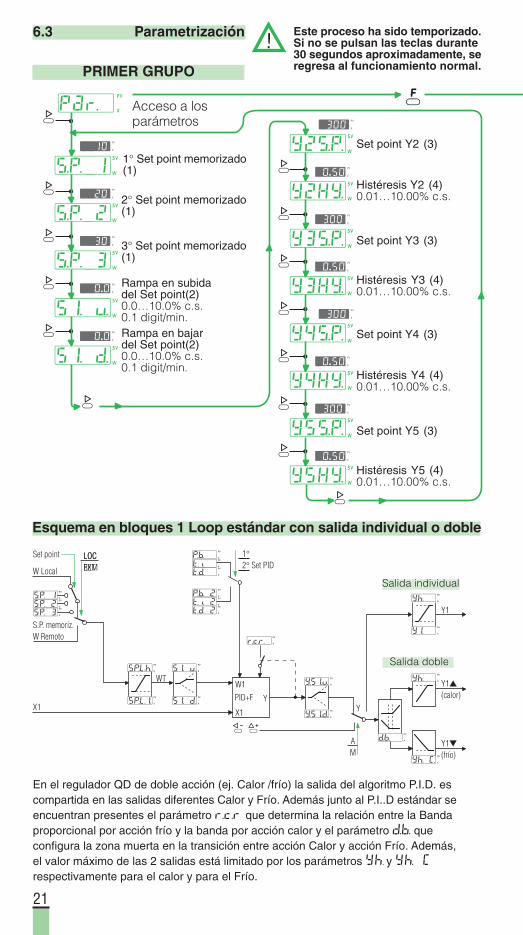
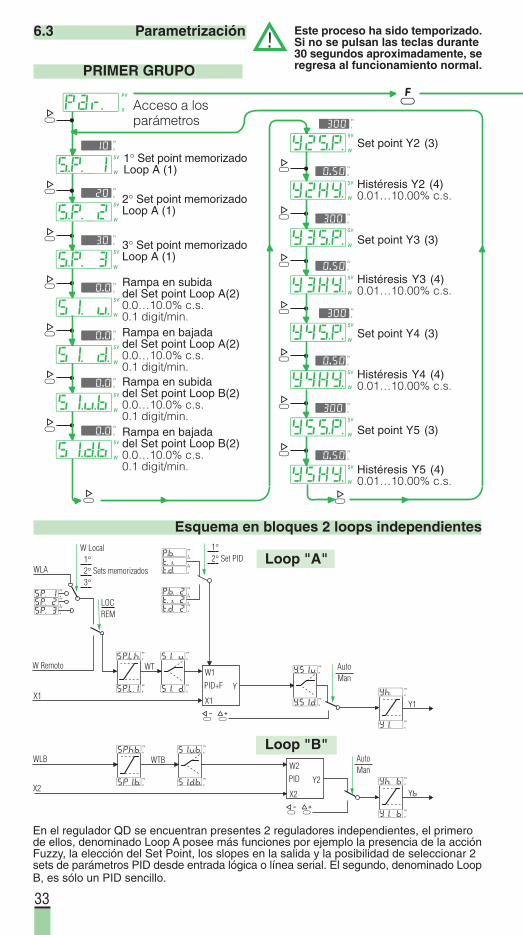
PRIMER GRUPO
Acceso a losparámetros
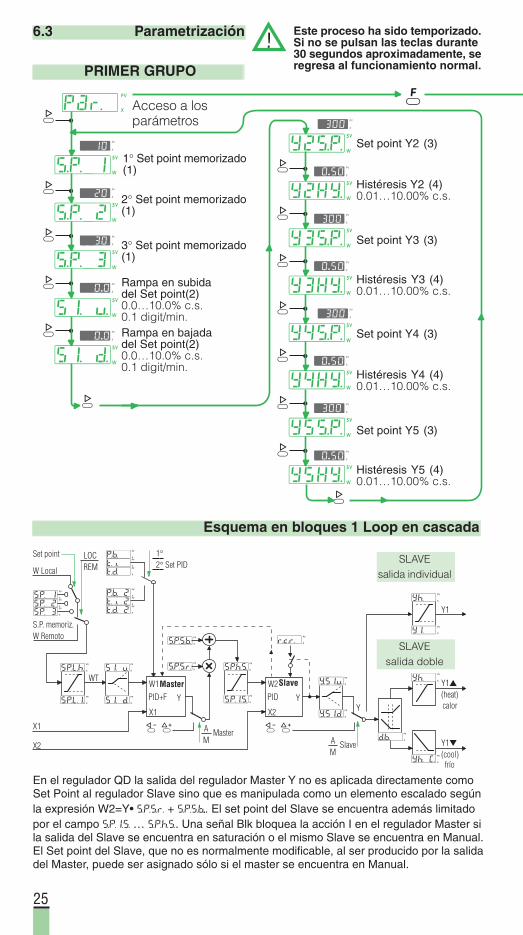
Este proceso ha sido temporizado.Si no se pulsan las teclas durante30 segundos aproximadamente, seregresa al funcionamiento normal.
Set point Y2 (3)
Histéresis Y2 (4)0.01…10.00% c.s.
Set point Y3 (3)
Histéresis Y3 (4)0.01…10.00% c.s.
Set point Y4 (3)
Histéresis Y4 (4)0.01…10.00% c.s.
Set point Y5 (3)
Histéresis Y5 (4)0.01…10.00% c.s.
Esquema en bloques 1 Loop estándar con salida individual o doble
6.3 Parametrización
En el regulador QD de doble acción (ej. Calor /frío) la salida del algoritmo P.I.D. escompartida en las salidas diferentes Calor y Frío. Además junto al P.I..D estándar seencuentran presentes el parámetro r.c.r que determina la relación entre la Bandaproporcional por acción frío y la banda por acción calor y el parámetro d.b. queconfigura la zona muerta en la transición entre acción Calor y acción Frío. Además,el valor máximo de las 2 salidas está limitado por los parámetros yh. y yh. Crespectivamente para el calor y para el Frío.
Salida individual
Salida doble
W Local
S.P. memoriz.W Remoto
Set point
Y1
(calor)
Y1
(frío)
LOCREM
6
22
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:20
Zt.d.S
> PSS50
Zr.y.
> PPS50:0
Zf.Int.
> PPSS30
Zt.c.
> PPSS30
Zt.c.SC.
> PPSS1:0
Zd.b.
> PPSS1:0
Zr.c.r.
>
>PS0:50
ZHy.
>
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:00
Zt.d.S
> PSS50
Zf.Int.
> PPSS60
Zt.y.
> PPSS1:0
Zdy.
>
Zpot.1
>
Y
Zpot.1
Y
>
Zpot.h
Y
>
X
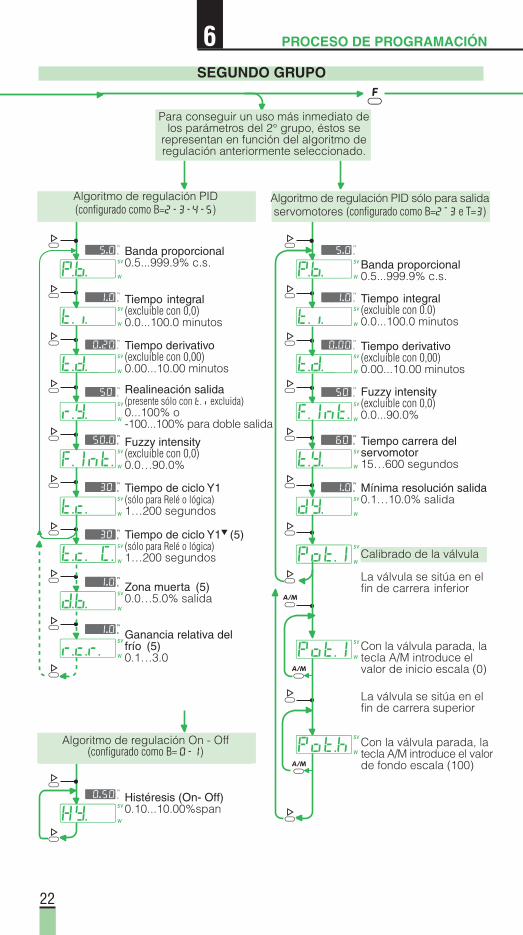
PROCESO DE PROGRAMACIÓN
SEGUNDO GRUPO
Algoritmo de regulación PID sólo para salidaservomotores (configurado como B=2_3 e T=3)
Algoritmo de regulación PID(configurado como B=2_3_4_5)
Para conseguir un uso más inmediato delos parámetros del 2° grupo, éstos se
representan en función del algoritmo deregulación anteriormente seleccionado.
La válvula se sitúa en elfin de carrera superior
Con la válvula parada, latecla A/M introduce elvalor de inicio escala (0)
Calibrado de la válvula
La válvula se sitúa en elfin de carrera inferior
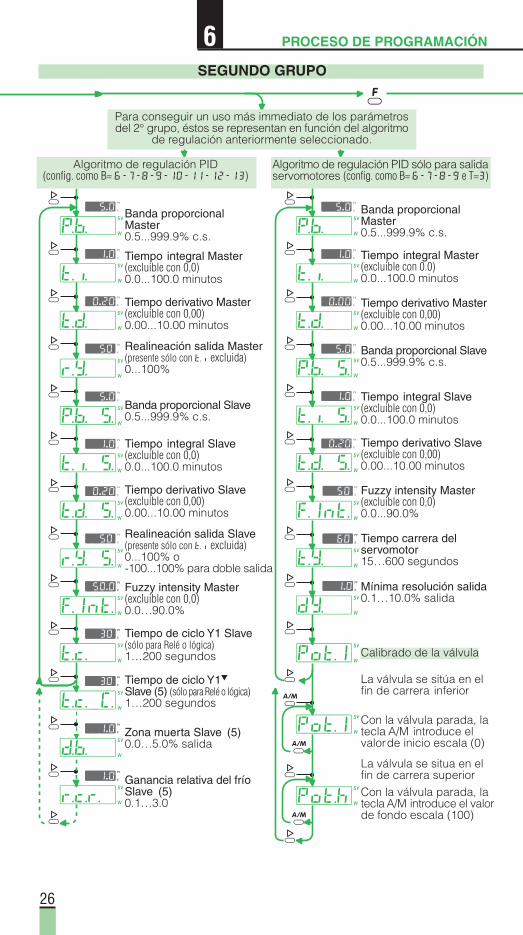
Mínima resolución salida0.1…10.0% salida
Tiempo carrera delservomotor15…600 segundos
Con la válvula parada, latecla A/M introduce el valorde fondo escala (100)
Tiempo integral(excluible con 0.0)0.0...100.0 minutos
Tiempo derivativo(excluible con 0,00)0.00...10.00 minutos
Banda proporcional0.5...999.9% c.s.
Fuzzy intensity(excluible con 0,0)0.0...90.0%
Tiempo de ciclo Y1(sólo para Relé o lógica)1…200 segundos
Fuzzy intensity(excluible con 0,0)0.0…90.0%
Tiempo integral(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo(excluible con 0,00)0.00...10.00 minutos
Banda proporcional0.5...999.9% c.s.
Realineación salida(presente sólo con t.i excluida)0...100% o-100...100% para doble salida
Algoritmo de regulación On - Off(configurado como B= 0_1)
Tiempo de ciclo Y1 (5)(sólo para Relé o lógica)1…200 segundos
Zona muerta (5)0.0…5.0% salida
Ganancia relativa delfrío (5)0.1…3.0
Histéresis (On- Off)0.10...10.00%span
23
6
XX
ZA.par
Q2222
>PS20:0
Zf.Er.r.
> P1O:00
Zf.der.
> PSSS3
Zt.san.
> PSSS0
Zt.fiI.
> PPSSS0
ZysI.u.
> PPSSS0
ZysI.d.
>
>PSS5:0
Zp.b. 2
> PSS1:0
Zt.i. 2
> PS0:20
Zt.d. 2S
> PSS50
Zr.y. 2
> PPS 1:0
Zr.c.r.2
>
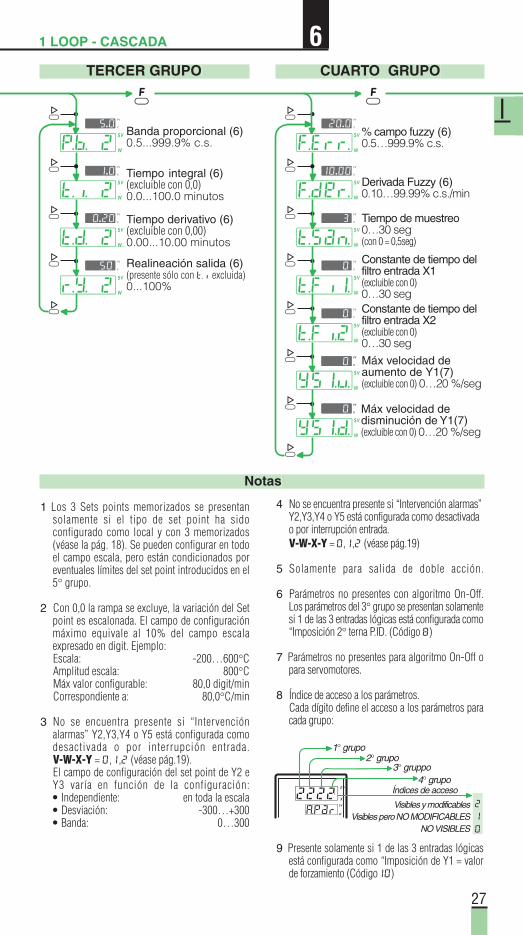
5 Solamente para salida de doble acción.
6 Parámetros no presentes con algoritmo On-Off.Los parámetros del 3° grupo se presentansolamente si 1 de las 3 entradas lógicas estáconfigurada como “Imposición 2° terna P.ID.(Código 8)
7 Parámetros no presentes para algoritmo On-Off opara servomotores.
8 Índice de acceso a los parámetros.Cada dígito define el acceso a los parámetros paracada grupo.
9 Presente solamente si 1 de las 3 entradas lógicasestá configurada como “Imposición de Y1 = valorde forzamiento (Código10)
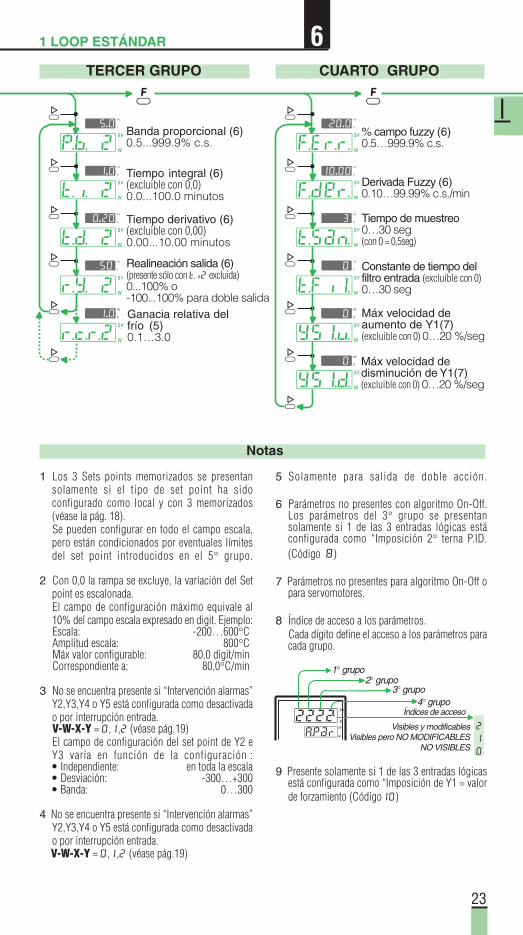
1 LOOP ESTÁNDAR
Derivada Fuzzy (6)0.10…99.99% c.s./min
Máx velocidad deaumento de Y1(7)(excluible con 0) 0…20 %/seg
Tiempo de muestreo0…30 seg(con 0 = 0,5seg)
Constante de tiempo delfiltro entrada (excluible con 0)0…30 seg
% campo fuzzy (6)0.5…999.9% c.s.
Máx velocidad dedisminución de Y1(7)(excluible con 0) 0…20 %/seg
TERCER GRUPO
Tiempo integral (6)(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo (6)(excluible con 0,00)0.00...10.00 minutos
Banda proporcional (6)0.5...999.9% c.s.
Realineación salida (6)(presente sólo con t.i2 excluida)0...100% o-100...100% para doble salidaGanacia relativa delfrío (5)0.1…3.0
CUARTO GRUPO
1 Los 3 Sets points memorizados se presentansolamente si el tipo de set point ha sidoconfigurado como local y con 3 memorizados(véase la pág. 18).Se pueden configurar en todo el campo escala,pero están condicionados por eventuales límitesdel set point introducidos en el 5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Setpoint es escalonada.El campo de configuración máximo equivale al10% del campo escala expresado en digit. Ejemplo:Escala: -200…600°CAmplitud escala: 800°CMáx valor configurable: 80,0 digit/minCorrespondiente a: 80,0°C/min
3 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)El campo de configuración del set point de Y2 eY3 varía en función de la configuración :• Independiente: en toda la escala• Desviación: -300…+300• Banda: 0…300
4 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)
Notas
3° grupo4° grupo
Visibles y modificablesVisibles pero NO MODIFICABLES
NO VISIBLES
2° grupo1° grupo
Índices de acceso
II
2
1
0
24
PSSS0
ZyI..SS
> PS100
Zyh.SS
> PS100
Zyh. C.
> PSSS0
ZIn.sh.
> PS 0
ZyIpr.
> PSSS0
Zsa.yI
> PSSS0
Zsa.y2
> PSSS0
Zsa.y3
> PSSS0
Zsa.y4
> PSSS0
Zsa.y5
>
OKOUI
NON
ÍndiceSeguridad Y2 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
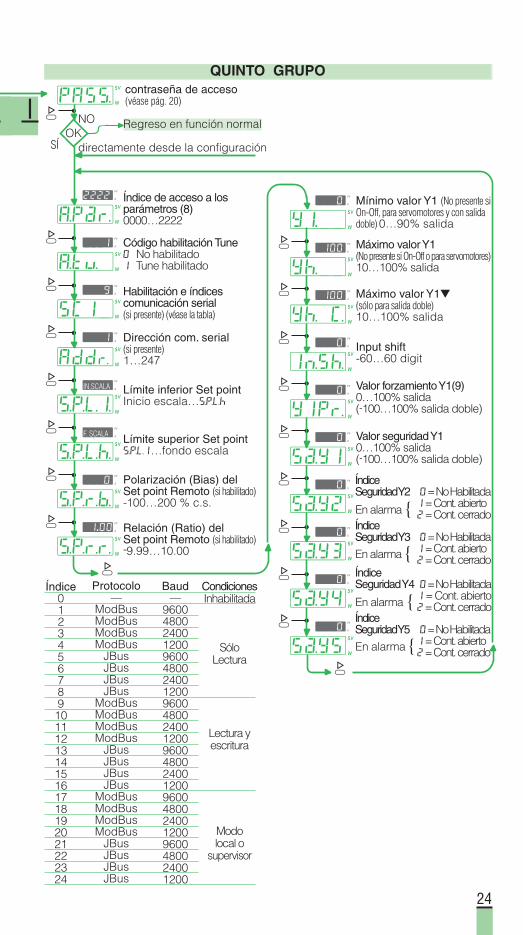
Regreso en función normal
QUINTO GRUPO
directamente desde la configuración
contraseña de acceso(véase pág. 20)
Índice de acceso a losparámetros (8)0000…2222
Dirección com. serial(si presente)1…247
Código habilitación Tune0 No habilitado1 Tune habilitado
Habilitación e índicescomunicación serial(si presente) (véase la tabla)
Límite inferior Set pointInicio escala…s.p.l.h
Límite superior Set points.p.l.I…fondo escala
Polarización (Bias) delSet point Remoto (si habilitado)-100…200 % c.s.
Relación (Ratio) delSet point Remoto (si habilitado)-9.99…10.00
Mínimo valor Y1 (No presente siOn-Off, para servomotores y con salidadoble) 0…90% salida
Máximo valor Y1(No presente si On-Off o para servomotores)10…100% salida
ÍndiceSeguridad Y3 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
Máximo valor Y1(sólo para salida doble)10…100% salida
Input shift-60…60 digit
Valor forzamiento Y1(9)0…100% salida(-100…100% salida doble)
En alarma
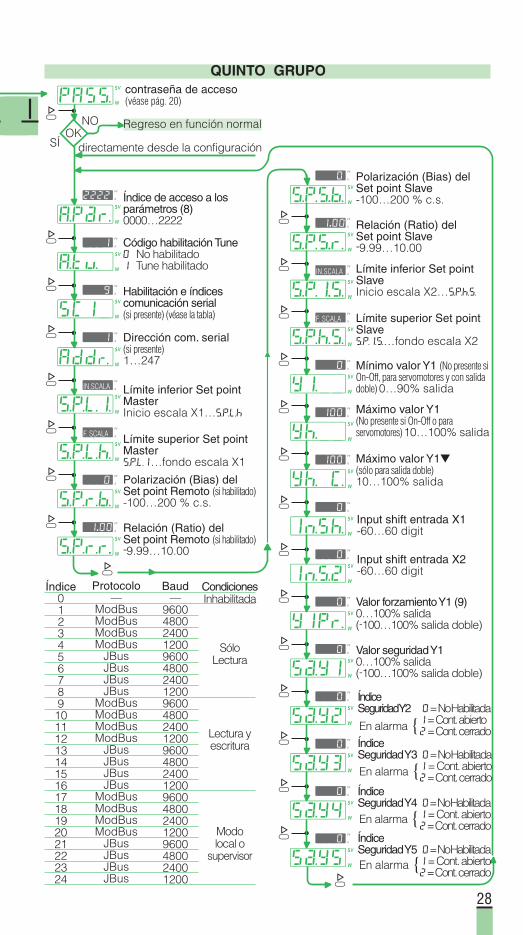
Índice0123456789101112131415161718192021222324
Protocolo—
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
Baud—
960048002400120096004800240012009600480024001200960048002400120096004800240012009600480024001200
CondicionesInhabilitada
SóloLectura
Lectura yescritura
Modolocal o
supervisor
ÍndiceSeguridad Y4 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
ÍndiceSeguridad Y5 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
Valor seguridad Y10…100% salida(-100…100% salida doble)
II ZpAss.>
P2222
ZA.par.
> PSSS1
ZA.tu.
> PSSS9
ZsCIS
> PSSS1
ZAddr.
> PIN.SCALA
Zs.p.l.I.
> PF. SCALA
Zs.p.l.h.
> PSSS0
Zs.p.r.b.
> PS1:00
Zs.p.r.r.
>
SÍ
25
>
PSS10
Zs.p.S1
> PSS20
Zs.p.S2
> PSS30
Zs.p.S3
> PSS0:0
ZsI. u.
> PSS0:0
ZsI. d.
>
PS300
Zy2s.p.
> PS0:50
Zy2Hy.
> PS300
Zy35.p.
> PS0:50
Zy3Hy.
> PS300
Zy4s.p.
> PS0:50
Zy4Hy.
> PS300
Zy55.p.
> PS0:50
Zy5Hy.
>
XQpar.
Qsp. 1
Qsp. 2
Qsp. 3
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp.l.h.
Qsp.l.1.
QsI. u.
QsI. d.
Qp.b.
Qt.i.
Qt.d.
< +
Qs.p.s.b.
Qs.p.s.r. Qsp.h.5.
Qsp.I.5.
< +
Qy.5I.u.
Qy.5I.d.
Qr.c.r.
Qyh.
QyI.
Qyh.
Qyh. C.
Qd.b.
WTW1
X1
YPID+FMaster
Master
W2
X2
YPID
Slave
Y
Y1
Y1
(heat)
Y1
(cool)
X1
X2
1°2° Set PID
Slave
AM A
M
1° Set point memorizado(1)
2° Set point memorizado(1)
Rampa en subidadel Set point(2)0.0…10.0% c.s.0.1 digit/min.
3° Set point memorizado(1)
Rampa en bajadadel Set point(2)0.0…10.0% c.s.0.1 digit/min.
PRIMER GRUPO
Acceso a losparámetros
Este proceso ha sido temporizado.Si no se pulsan las teclas durante30 segundos aproximadamente, seregresa al funcionamiento normal.
Set point Y2 (3)
Histéresis Y2 (4)0.01…10.00% c.s.
Set point Y3 (3)
Histéresis Y3 (4)0.01…10.00% c.s.
Set point Y4 (3)
Histéresis Y4 (4)0.01…10.00% c.s.
Set point Y5 (3)
Histéresis Y5 (4)0.01…10.00% c.s.
Esquema en bloques 1 Loop en cascada
6.3 Parametrización
En el regulador QD la salida del regulador Master Y no es aplicada directamente comoSet Point al regulador Slave sino que es manipulada como un elemento escalado segúnla expresión W2=Y• s.p.5.r. + s.p.5.b...... El set point del Slave se encuentra además limitadopor el campo s.p.I.5. … s.p.h.5.. Una señal Blk bloquea la acción I en el regulador Master sila salida del Slave se encuentra en saturación o el mismo Slave se encuentra en Manual.El Set point del Slave, que no es normalmente modificable, al ser producido por la salidadel Master, puede ser asignado sólo si el master se encuentra en Manual.
SLAVEsalida doble
W Local
S.P. memoriz.W Remoto
Set point SLAVEsalida individual
LOCREM
calor
frío
26
6
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:20
Zt.d.S
> PSS50
Zr.y.
> PSS5:0
Zp.b. 5.
> PSS1:0
Zt.i. 5.
> PS0:20
Zt.d. 5.
> PSS50
Zr.y. 5.
> PPS50:0
Zf.Int.
> PPSS30
Zt.c.
> PPSS30
Zt.c.SC.
> PPSS1:0
Zd.b.
> PPSS1:0
Zr.c.r.
>
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:00
Zt.d.S
> PSS5:0
Zp.b. 5.
> PSS1:0
Zt.i. 5.
> PS0:20
Zt.d. 5.
> PSS50
Zf.Int.
> PPSS60
Zt.y.
> PPSS1:0
Zdy.
>
Zpot.1
>
Y
Zpot.1
Y
>
Zpot.h
Y
>
X
SEGUNDO GRUPO
Algoritmo de regulación PID sólo para salidaservomotores (config. como B= 6_7_8_9 e T=3)
Algoritmo de regulación PID(config. como B= 6_7_8_9_10_11_12_13)
Para conseguir un uso más immediato de los parámetrosdel 2° grupo, éstos se representan en función del algoritmo
de regulación anteriormente seleccionado.
La válvula se situa en elfin de carrera superior
Con la válvula parada, latecla A/M introduce elvalorde inicio escala (0)
Calibrado de la válvula
La válvula se sitúa en elfin de carrera inferior
Mínima resolución salida0.1…10.0% salida
Tiempo carrera delservomotor15…600 segundos
Con la válvula parada, latecla A/M introduce el valorde fondo escala (100)
Tiempo integral Master(excluible con 0.0)0.0...100.0 minutos
Tiempo derivativo Master(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalMaster0.5...999.9% c.s.
Fuzzy intensity Master(excluible con 0,0)0.0...90.0%
Tiempo de ciclo Y1 Slave(sólo para Relé o lógica)1…200 segundos
Fuzzy intensity Master(excluible con 0,0)0.0…90.0%
Tiempo integral Master(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Master(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalMaster0.5...999.9% c.s.
Realineación salida Master(presente sólo con t.i excluida)0...100%
Tiempo de ciclo Y1
Slave (5) (sólo para Relé o lógica)1…200 segundos
Zona muerta Slave (5)0.0…5.0% salida
Ganancia relativa del fríoSlave (5)0.1…3.0
PROCESO DE PROGRAMACIÓN
Tiempo integral Slave(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Slave(excluible con 0,00)0.00...10.00 minutos
Banda proporcional Slave0.5...999.9% c.s.
Realineación salida Slave(presente sólo con t.i excluida)0...100% o-100...100% para doble salida
Tiempo integral Slave(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Slave(excluible con 0,00)0.00...10.00 minutos
Banda proporcional Slave0.5...999.9% c.s.
27
6
XX
ZA.par
Q2222
>PS20:0
Zf.Err.
> P1O:00
Zf.der.
> PSSS3
Zt.san.
> PSSS0
Zt.fiI.
> PSSS0
Zt.fi.2
> PPSSS0
ZysI.u.
> PPSSS0
ZysI.d.
>
>PSS5:0
Zp.b. 2
> PSS1:0
Zt.i. 2
> PS0:20
Zt.d. 2S
> PSS50
Zr.y. 2
>
1 LOOP - CASCADA
Derivada Fuzzy (6)0.10…99.99% c.s./min
Máx velocidad deaumento de Y1(7)(excluible con 0) 0…20 %/seg
Tiempo de muestreo0…30 seg(con 0 = 0,5seg)
Constante de tiempo delfiltro entrada X1(excluible con 0)0…30 seg
% campo fuzzy (6)0.5…999.9% c.s.
Máx velocidad dedisminución de Y1(7)(excluible con 0) 0…20 %/seg
TERCER GRUPO
Tiempo integral (6)(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo (6)(excluible con 0,00)0.00...10.00 minutos
Banda proporcional (6)0.5...999.9% c.s.
Realineación salida (6)(presente sólo con t.i excluida)0...100%
CUARTO GRUPO
Constante de tiempo delfiltro entrada X2(excluible con 0)0…30 seg
1 Los 3 Sets points memorizados se presentansolamente si el tipo de set point ha sidoconfigurado como local y con 3 memorizados(véase la pág. 18). Se pueden configurar en todoel campo escala, pero están condicionados poreventuales límites del set point introducidos en el5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Setpoint es escalonada. El campo de configuraciónmáximo equivale al 10% del campo escalaexpresado en digit. Ejemplo:Escala: -200…600°CAmplitud escala: 800°CMáx valor configurable: 80,0 digit/minCorrespondiente a: 80,0°C/min
3 No se encuentra presente si “Intervenciónalarmas” Y2,Y3,Y4 o Y5 está configurada comodesactivada o por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19).El campo de configuración del set point de Y2 eY3 varía en función de la configuración:• Independiente: en toda la escala• Desviación: -300…+300• Banda: 0…300
Notas
4 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)
5 Solamente para salida de doble acción.
6 Parámetros no presentes con algoritmo On-Off.Los parámetros del 3° grupo se presentan solamentesi 1 de las 3 entradas lógicas está configurada como“Imposición 2° terna P.ID. (Código 8)
7 Parámetros no presentes para algoritmo On-Off opara servomotores.
8 Índice de acceso a los parámetros.Cada dígito define el acceso a los parámetros paracada grupo:
9 Presente solamente si 1 de las 3 entradas lógicasestá configurada como “Imposición de Y1 = valorde forzamiento (Código10)
3° gruppo4° grupo
Visibles y modificablesVisibles pero NO MODIFICABLES
NO VISIBLES
2° grupo1° grupo
Índices de acceso
I I
2
1
0
28
OK
PSSS0
Zs.p.5..b.
> PS1:00
Zs.p.5..r.
> PIN.SCALA
Zs.p.I..5.
> PF. SCALA
Zs.p.h.5.
> PSSS0
ZyI.SS
> PS100
Zyh.SS
> PS100
Zyh. C.
> PSSS0
ZIn.sh.
> PSSS0
ZIn.s.2
> PS 0
ZyIpr.
> PSSS0
Zsa.yI
> PSSS0
Zsa.y2
> PSSS0
Zsa.y3
> PSSS0
Zsa.y4
> PSSS0
Zsa.y5
>
ÍndiceSeguridad Y2 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
Regreso en función normal
QUINTO GRUPO
directamente desde la configuración
contraseña de acceso(véase pág. 20)
Índice de acceso a losparámetros (8)0000…2222
Dirección com. serial(si presente)1…247
Código habilitación Tune0 No habilitado1 Tune habilitado
Habilitación e índicescomunicación serial(si presente) (véase la tabla)
Límite inferior Set pointMasterInicio escala X1…s.p.l.h
Límite superior Set pointMasters.p.l.I…fondo escala X1
Polarización (Bias) delSet point Remoto (si habilitado)-100…200 % c.s.
Relación (Ratio) delSet point Remoto (si habilitado)-9.99…10.00
Mínimo valor Y1 (No presente siOn-Off, para servomotores y con salidadoble) 0…90% salida
Máximo valor Y1(No presente si On-Off o paraservomotores) 10…100% salida
ÍndiceSeguridad Y3 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
Máximo valor Y1(sólo para salida doble)10…100% salida
Input shift entrada X2-60…60 digit
Valor seguridad Y10…100% salida(-100…100% salida doble)
En alarma
Índice0123456789101112131415161718192021222324
Protocolo—
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
Baud—
960048002400120096004800240012009600480024001200960048002400120096004800240012009600480024001200
CondicionesInhabilitada
SóloLectura
Lectura yescritura
Modolocal o
supervisor
ÍndiceSeguridad Y4 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
ÍndiceSeguridad Y5 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
En alarma
Valor forzamiento Y1 (9)0…100% salida(-100…100% salida doble)
Input shift entrada X1-60…60 digit
Polarización (Bias) delSet point Slave-100…200 % c.s.
Relación (Ratio) delSet point Slave-9.99…10.00
Límite inferior Set pointSlaveInicio escala X2…s.p.h.5.
Límite superior Set pointSlaves.p.I.5.…fondo escala X2
I ISÍ
NO
ZpAss.>
P2222
ZA.par.
> PSSS1
ZA.tu.
> PSSS9
ZsCIS
> PSSS1
ZAddr..
> PIN.SCALA
Zs.p.l.I.
> PF. SCALA
Zs.p.l.h.
> PSSS0
Zs.p.r.b.
> PS1:00
Zs.p.r.r..
>
29
XQpar.
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp.l.h.
Qsp.l.1.
QsI. u.
QsI. d.
Qp.b.
Qt.i.
Qt.d.
< +
Qy.5I.u.
Qy.5I.d.
Qyh.
QyI.
Qyh.
Qyh. C.
Qd.b.
WTW
X
YPID+F
Y1
X1
Y1
AutoMan
X2
DirInv
1°2° Set PID
1 K
K
>
PSS10
Zs.p.S1
> PSS20
Zs.p.S2
> PSS30
Zs.p.S3
> PSS0:0
ZsI. u.
> PSS0:0
ZsI. d.
>
PS300
Zy2s.p.
> PS0:50
Zy2Hy.
> PS300
Zy35.p.
> PS0:50
Zy3Hy.
> PS300
Zy4s.p.
> PS0:50
Zy4Hy.
> PS300
Zy55.p.
> PS0:50
Zy5Hy.
>
En el regulador QD de relación el Set point aplicado al algoritmo PID se obtiene multiplicando(o dividiendo si la relación es inversa) la variable de referencia por un factor K que es larelación que queremos obtener.Ejemplo: WT = X2•K (Relación directa) WT = X2• 1 (Relación inversa) K
1° Set Pointmemorizado (1)
2° Set Pointmemorizado (1)
Rampa en subida delSet Point (2)0.0…10.0% e.e.0.1 digit/min.
3° Set Pointmemorizado (1)
PRIMER GRUPO
Acceso a losparámetros
Este proceso ha sido temporizado.Si no se pulsan las teclas durante30 segundos aproximadamente, seregresa al funcionamiento normal.
Set Point Y2 (3)
Histéresis Y2 (4)0.01…10.00% e.e.
Set Point Y3 (3)
Histéresis Y3 (4)0.01…10.00% e.e.
Set Point Y4 (3)
Histéresis Y4 (4)0.01…10.00% e.e.
Set Point Y5 (3)
Histéresis Y5 (4)0.01…10.00% e.e.
Esquema en bloques 1 Loop de relación
6.3 Parámetrización
Salida individual
Salida doble
Y1
(calor)
Y1
(frío)
30
6
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:20
Zt.d.S
> PSS50
Zr.y.
> PPS50:0
Zf.Int.
> PPSS30
Zt.c.
> PPSS30
Zt.c.SC.
> PPSS1:0
Zd.b.
> PPSS1:0
Zr.c.r.
>
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:00
Zt.d.S
> PSS50
Zf.Int.
> PPSS60
Zt.y.
> PPSS1:0
Zdy.
>
Zpot.1
>
Y
Zpot.1
Y
>
Zpot.h
Y
>
X
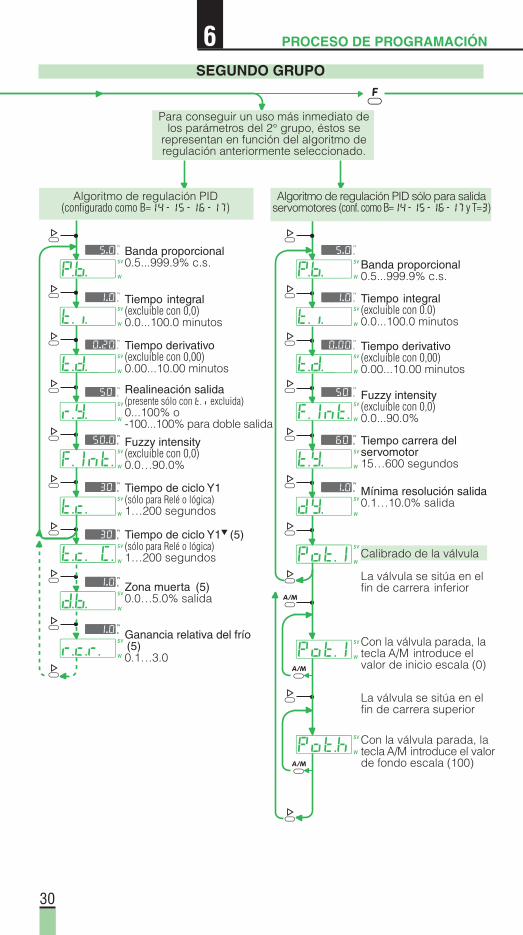
SEGUNDO GRUPO
Algoritmo de regulación PID sólo para salidaservomotores (conf. como B=14_15_16_17 y T=3)
Algoritmo de regulación PID(configurado como B=14_15_16_17)
Para conseguir un uso más inmediato delos parámetros del 2° grupo, éstos se
representan en función del algoritmo deregulación anteriormente seleccionado.
La válvula se sitúa en elfin de carrera superior
Con la válvula parada, latecla A/M introduce elvalor de inicio escala (0)
Calibrado de la válvula
La válvula se sitúa en elfin de carrera inferior
Mínima resolución salida0.1…10.0% salida
Tiempo carrera delservomotor15…600 segundos
Con la válvula parada, latecla A/M introduce el valorde fondo escala (100)
Tiempo integral(excluible con 0.0)0.0...100.0 minutos
Tiempo derivativo(excluible con 0,00)0.00...10.00 minutos
Banda proporcional0.5...999.9% c.s.
Fuzzy intensity(excluible con 0,0)0.0...90.0%
Tiempo de ciclo Y1(sólo para Relé o lógica)1…200 segundos
Fuzzy intensity(excluible con 0,0)0.0…90.0%
Tiempo integral(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo(excluible con 0,00)0.00...10.00 minutos
Banda proporcional0.5...999.9% c.s.
Realineación salida(presente sólo con t.i excluida)0...100% o-100...100% para doble salida
Tiempo de ciclo Y1 (5)(sólo para Relé o lógica)1…200 segundos
Zona muerta (5)0.0…5.0% salida
Ganancia relativa del frío (5)0.1…3.0
PROCESO DE PROGRAMACIÓN
31
6
XX
2
1
0
ZA.par
Q2222
>PSS5:0
Zp.b. 2
> PSS1:0
Zt.i. 2
> PS0:20
Zt.d. 2S
> PSS50
Zr.y. 2
> PPS 1:0
Zr.c.r.2
>
>PS20:0
Zf.Err.
> P1O:00
Zf.der.
> PSSS3
Zt.san.
> PSSS0
Zt.fiI.
> PSSS0
Zt.fi.2
> PPSSS0
Zy5I.u.
> PPSSS0
Zy5I.d.
>
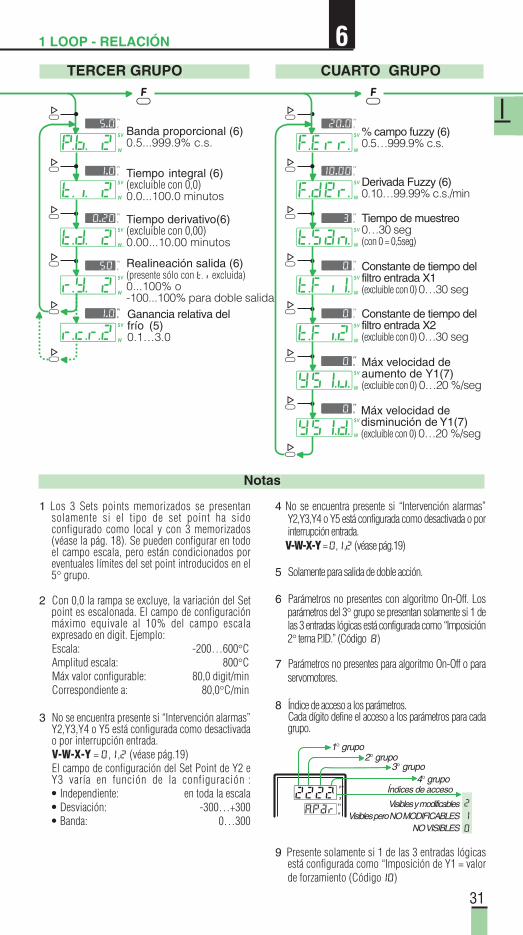
1 LOOP - RELACIÓN
Derivada Fuzzy (6)0.10…99.99% c.s./min
Máx velocidad deaumento de Y1(7)(excluible con 0) 0…20 %/seg
Tiempo de muestreo0…30 seg(con 0 = 0,5seg)
Constante de tiempo delfiltro entrada X1(excluible con 0) 0…30 seg
% campo fuzzy (6)0.5…999.9% c.s.
Máx velocidad dedisminución de Y1(7)(excluible con 0) 0…20 %/seg
TERCER GRUPO
I I
Tiempo integral (6)(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo(6)(excluible con 0,00)0.00...10.00 minutos
Banda proporcional (6)0.5...999.9% c.s.
Realineación salida (6)(presente sólo con t.i excluida)0...100% o-100...100% para doble salidaGanancia relativa delfrío (5)0.1…3.0
CUARTO GRUPO
Constante de tiempo delfiltro entrada X2(excluible con 0) 0…30 seg
1 Los 3 Sets points memorizados se presentansolamente si el tipo de set point ha sidoconfigurado como local y con 3 memorizados(véase la pág. 18). Se pueden configurar en todoel campo escala, pero están condicionados poreventuales límites del set point introducidos en el5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Setpoint es escalonada. El campo de configuraciónmáximo equivale al 10% del campo escalaexpresado en digit. Ejemplo:Escala: -200…600°CAmplitud escala: 800°CMáx valor configurable: 80,0 digit/minCorrespondiente a: 80,0°C/min
3 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)El campo de configuración del Set Point de Y2 eY3 varía en función de la configuración :• Independiente: en toda la escala• Desviación: -300…+300• Banda: 0…300
Notas
4 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivada o porinterrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)
5 Solamente para salida de doble acción.
6 Parámetros no presentes con algoritmo On-Off. Losparámetros del 3° grupo se presentan solamente si 1 delas 3 entradas lógicas está configurada como “Imposición2° terna P.ID.” (Código 8)
7 Parámetros no presentes para algoritmo On-Off o paraservomotores.
8 Índice de acceso a los parámetros.Cada dígito define el acceso a los parámetros para cadagrupo.
9 Presente solamente si 1 de las 3 entradas lógicasestá configurada como “Imposición de Y1 = valorde forzamiento (Código10)
3° grupo4° grupo
Visibles y modificablesVisibles pero NO MODIFICABLES
NO VISIBLES
2° grupo1° grupo
Índices de acceso
32
PSSS0
ZyI.SS
> PS100
Zyh.SS
> PS100
Zyh. C.
> PSSS0
ZIn.sh.
> PSSS0
ZIn.s.2
> PS 0
Z.yIpr.
> PSSS0
Zsa.y1.
> PSSS0
Zsa.y2
> PSSS0
Zsa.y3
> PSSS0
Zsa.y4
> PSSS0
Zsa.y5
>
OK
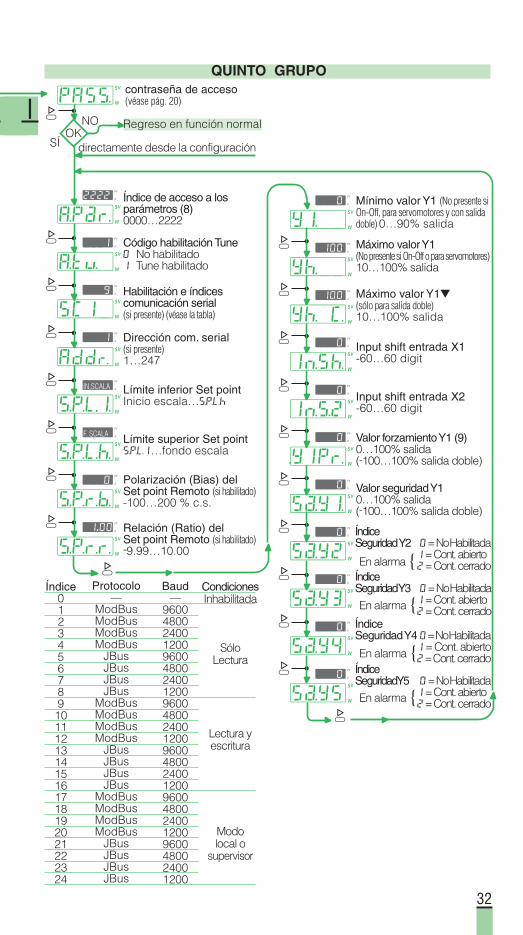
ÍndiceSeguridad Y2 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
Regreso en función normal
QUINTO GRUPO
directamente desde la configuración
contraseña de acceso(véase pág. 20)
Índice de acceso a losparámetros (8)0000…2222
Dirección com. serial(si presente)1…247
Código habilitación Tune0 No habilitado1 Tune habilitado
Habilitación e índicescomunicación serial(si presente) (véase la tabla)
Límite inferior Set pointInicio escala…s.p.l.h
Límite superior Set points.p.l.I…fondo escala
Polarización (Bias) delSet point Remoto (si habilitado)-100…200 % c.s.
Relación (Ratio) delSet point Remoto (si habilitado)-9.99…10.00
Mínimo valor Y1 (No presente siOn-Off, para servomotores y con salidadoble) 0…90% salida
Máximo valor Y1(No presente si On-Off o para servomotores)10…100% salida
ÍndiceSeguridad Y3 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
Máximo valor Y1(sólo para salida doble)10…100% salida
Input shift entrada X1-60…60 digit
Valor forzamiento Y1 (9)0…100% salida(-100…100% salida doble)
I I
En alarma Índice
0123456789101112131415161718192021222324
Protocolo—
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
Baud—
960048002400120096004800240012009600480024001200960048002400120096004800240012009600480024001200
CondicionesInhabilitada
SóloLectura
Lectura yescritura
Modolocal o
supervisor
ÍndiceSeguridad Y4 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
ÍndiceSeguridadY5 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
Valor seguridad Y10…100% salida(-100…100% salida doble)
Input shift entrada X2-60…60 digit
NO
SÍ
ZpAss.>
P2222
ZA.par.
> PSSS1
ZA.tu.
> PSSS9
ZsCIS
> PSSS1
ZAddr.
> PIN.SCALA
Zs.p.l..I.
> PF. SCALA
Zs.p.l.h.
> PSSS0
Zs.p.r.b.
> PS1:00
Zs.p.r.r.
>
33
XQpar.
Qsp. 1
Qsp. 2
Qsp. 3
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp.l.h.
Qsp.l.1.
QsI. u.
QsI. d.
Qp.b.
Qt.i.
Qt.d.
< +
Qy.5I.u.
Qy.5I.d.
Qyh.
QyI.
WTW1
X1
YPID+F
Y1X1
Qsp.h.b.
QspI.b.
QsI.u.b.
QsI.d.b.
< +
WTBW2
X2
Y2PID Qyh. b
QyI. b
Yb
WLA
WLB
X2
1°2° Set PID
AutoMan
LOCREM
AutoMan
>
PSS10
Zs.p.S1
> PSS20
Zs.p.S2
> PSS30
Zs.p.S3
> PSS0:0
ZsI. u.
> PSS0:0
ZsI. d.
> PSS0:0
ZsI.u.b
> PSS0:0
ZsI.d.b
>
PS300
Zy2s.p.
> PS0:50
Zy2Hy.
> PS300
Zy35.p.
> PS0:50
Zy3Hy.
> PS300
Zy4s.p.
> PS0:50
Zy4Hy.
> PS300
Zy55.p.
> PS0:50
Zy5Hy.
>
1° Set point memorizadoLoop A (1)
2° Set point memorizadoLoop A (1)
Rampa en subidadel Set point Loop A(2)0.0…10.0% c.s.0.1 digit/min.
3° Set point memorizadoLoop A (1)
Rampa en bajadadel Set point Loop A(2)0.0…10.0% c.s.0.1 digit/min.
PRIMER GRUPO
Rampa en subidadel Set point Loop B(2)0.0…10.0% c.s.0.1 digit/min.Rampa en bajadadel Set point Loop B(2)0.0…10.0% c.s.0.1 digit/min.
Acceso a losparámetros
Este proceso ha sido temporizado.Si no se pulsan las teclas durante30 segundos aproximadamente, seregresa al funcionamiento normal.
Set point Y2 (3)
Histéresis Y2 (4)0.01…10.00% c.s.
Set point Y3 (3)
Histéresis Y3 (4)0.01…10.00% c.s.
Set point Y4 (3)
Histéresis Y4 (4)0.01…10.00% c.s.
Set point Y5 (3)
Histéresis Y5 (4)0.01…10.00% c.s.
W Remoto
W Local1°2° Sets memorizados3°
Esquema en bloques 2 loops independientes
6.3 Parametrización
En el regulador QD se encuentran presentes 2 reguladores independientes, el primerode ellos, denominado Loop A posee más funciones por ejemplo la presencia de la acciónFuzzy, la elección del Set Point, los slopes en la salida y la posibilidad de seleccionar 2sets de parámetros PID desde entrada lógica o línea serial. El segundo, denominado LoopB, es sólo un PID sencillo.
Loop "A"
Loop "B"
34
6
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:00
Zt.d.S
> PSS5:0
Zp.b. b
> PSS1:0
Zt.i. b
> PS0:20
Zt.d. b
> PSS50
Zf.Int.
> PPSS30
Zt.c.Sb
> PPSS60
Zt.y.
> PPSS1:0
Zdy.
>
Zpot.1
>
Y
Zpot.1Y
>
Zpot.hY
>
>PSS5:0
Zp.b.
> PSS1:0
Zt.i.
> PS0:20
Zt.d.S
> PSS50
Zr.y.
> PSS5:0
Zp.b. b
> PSS1:0
Zt.i. b
> PS0:20
Zt.d. b
> PSS50
Zr.y. b
> PPS50:0
Zf.Int.
> PPSS30
Zt.c.
> PPSS30
Zt.c.Sb
>
X
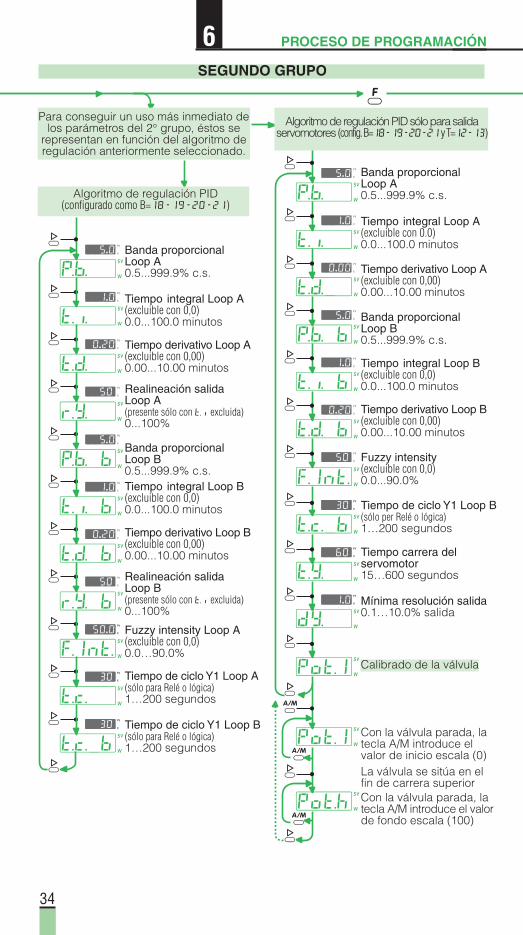
SEGUNDO GRUPO
Algoritmo de regulación PID sólo para salidaservomotores (config. B=18_19_20_21 y T=12_13)
Algoritmo de regulación PID(configurado como B=18_19_20_21)
Para conseguir un uso más inmediato delos parámetros del 2° grupo, éstos se
representan en función del algoritmo deregulación anteriormente seleccionado.
La válvula se sitúa en elfin de carrera superior
Con la válvula parada, latecla A/M introduce elvalor de inicio escala (0)
Calibrado de la válvula
Mínima resolución salida0.1…10.0% salida
Tiempo carrera delservomotor15…600 segundos
Con la válvula parada, latecla A/M introduce el valorde fondo escala (100)
Tiempo integral Loop A(excluible con 0.0)0.0...100.0 minutos
Tiempo derivativo Loop A(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalLoop A0.5...999.9% c.s.
Fuzzy intensity(excluible con 0,0)0.0...90.0%
Tiempo de ciclo Y1 Loop A(sólo para Relé o lógica)1…200 segundos
Fuzzy intensity Loop A(excluible con 0,0)0.0…90.0%
Tiempo integral Loop A(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Loop A(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalLoop A0.5...999.9% c.s.
Realineación salidaLoop A(presente sólo con t.i excluida)0...100%
PROCESO DE PROGRAMACIÓN
Tiempo integral Loop B(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Loop B(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalLoop B0.5...999.9% c.s.
Realineación salidaLoop B(presente sólo con t.i excluida)0...100%
Tiempo integral Loop B(excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Loop B(excluible con 0,00)0.00...10.00 minutos
Banda proporcionalLoop B0.5...999.9% c.s.
Tiempo de ciclo Y1 Loop B(sólo para Relé o lógica)1…200 segundos
Tiempo de ciclo Y1 Loop B(sólo per Relé o lógica)1…200 segundos
35
6
XX
ZA.par
Q2222
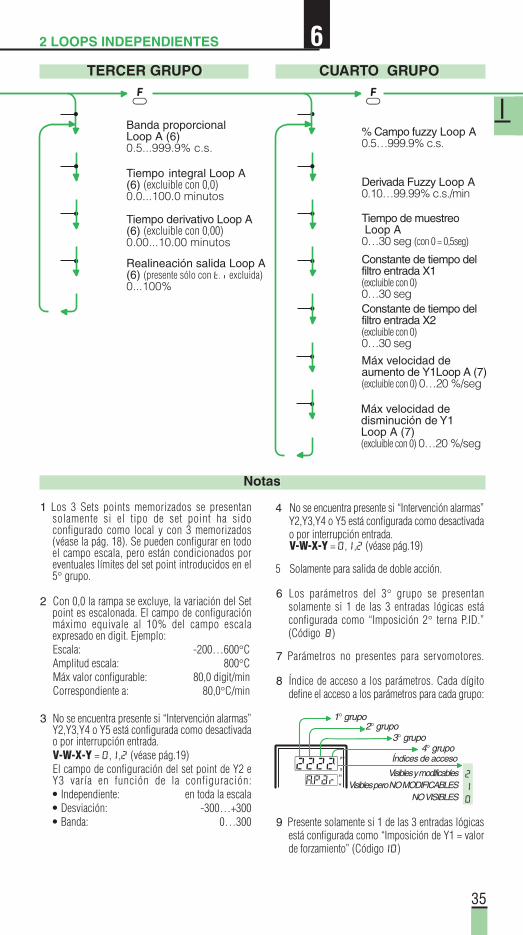
2 LOOPS INDEPENDIENTES
Derivada Fuzzy Loop A0.10…99.99% c.s./min
Máx velocidad deaumento de Y1Loop A (7)(excluible con 0) 0…20 %/seg
Tiempo de muestreo Loop A0…30 seg (con 0 = 0,5seg)
Constante de tiempo delfiltro entrada X1(excluible con 0)0…30 seg
% Campo fuzzy Loop A0.5…999.9% c.s.
Máx velocidad dedisminución de Y1Loop A (7)(excluible con 0) 0…20 %/seg
TERCER GRUPO
I I
Tiempo integral Loop A(6) (excluible con 0,0)0.0...100.0 minutos
Tiempo derivativo Loop A(6) (excluible con 0,00)0.00...10.00 minutos
Banda proporcionalLoop A (6)0.5...999.9% c.s.
Realineación salida Loop A(6) (presente sólo con t.i excluida)0...100%
CUARTO GRUPO
Constante de tiempo delfiltro entrada X2(excluible con 0)0…30 seg
1 Los 3 Sets points memorizados se presentansolamente si el tipo de set point ha sidoconfigurado como local y con 3 memorizados(véase la pág. 18). Se pueden configurar en todoel campo escala, pero están condicionados poreventuales límites del set point introducidos en el5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Setpoint es escalonada. El campo de configuraciónmáximo equivale al 10% del campo escalaexpresado en digit. Ejemplo:Escala: -200…600°CAmplitud escala: 800°CMáx valor configurable: 80,0 digit/minCorrespondiente a: 80,0°C/min
3 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)El campo de configuración del set point de Y2 eY3 varía en función de la configuración:• Independiente: en toda la escala• Desviación: -300…+300• Banda: 0…300
Notas
4 No se encuentra presente si “Intervención alarmas”Y2,Y3,Y4 o Y5 está configurada como desactivadao por interrupción entrada.V-W-X-Y = 0,1,2 (véase pág.19)
5 Solamente para salida de doble acción.
6 Los parámetros del 3° grupo se presentansolamente si 1 de las 3 entradas lógicas estáconfigurada como “Imposición 2° terna P.ID.”(Código 8)
7 Parámetros no presentes para servomotores.
8 Índice de acceso a los parámetros. Cada dígitodefine el acceso a los parámetros para cada grupo:
9 Presente solamente si 1 de las 3 entradas lógicasestá configurada como “Imposición de Y1 = valorde forzamiento” (Código10)
3° grupo4° grupo
Visibles y modificablesVisibles pero NO MODIFICABLES
NO VISIBLES
2° grupo
Índices de acceso
1° grupo
2
1
0
ZA.par
Q2222
36
PSSS0
Zs.p.r..b.
> PS1:00
Zs.p.r..r.
> PSSS0
Zy1..SS
> PS100
Zyh.SS
> PS 0
ZyI. b
> PS100
Zyh. b
> PSSS0
ZIn.sh.
> PSSS0
ZIn.s.2.
> PS 0
ZyIpr.
> PSSS0
Zsa.yI
> PSSS0
Zsa.y2
> PSSS0
Zsa.y3
> PSSS0
Zsa.y4
> PSSS0
Zsa.y5
> PSSS0
Zsa.yb
>
OK
ÍndiceSeguridad Y2 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
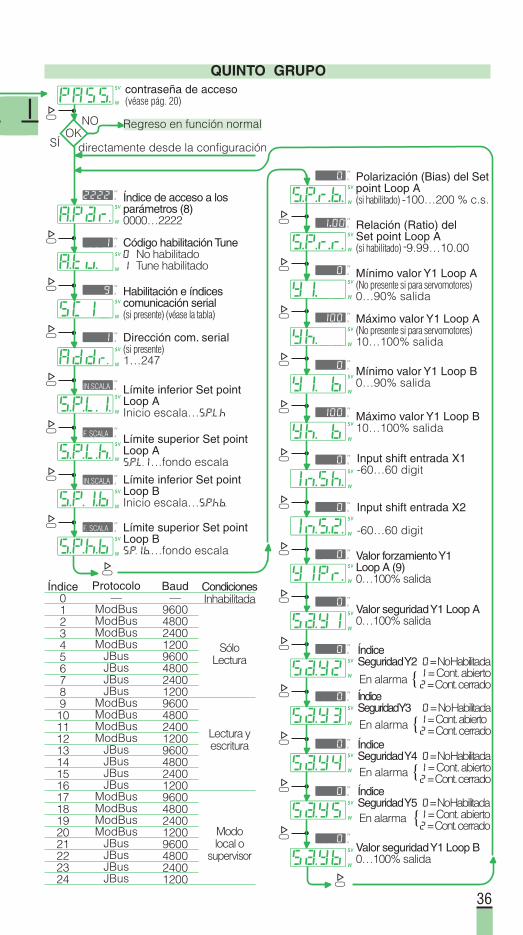
Regreso en función normal
QUINTO GRUPO
directamente desde la configuración
contraseña de acceso(véase pág. 20)
Índice de acceso a losparámetros (8)0000…2222
Dirección com. serial(si presente)1…247
Código habilitación Tune0 No habilitado1 Tune habilitado
Habilitación e índicescomunicación serial(si presente) (véase la tabla)
Límite inferior Set pointLoop AInicio escala…s.p.l.h
Límite superior Set pointLoop As.p.l.I…fondo escala
Mínimo valor Y1 Loop A(No presente si para servomotores)0…90% salida
Máximo valor Y1 Loop A(No presente si para servomotores)10…100% salida
ÍndiceSeguridad Y3 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
Input shift entrada X2
-60…60 digit
Valor seguridad Y1 Loop A0…100% salida
I I
En alarma
Índice0123456789101112131415161718192021222324
Protocolo—
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
ModBusModBusModBusModBus
JBusJBusJBusJBus
Baud—
960048002400120096004800240012009600480024001200960048002400120096004800240012009600480024001200
CondicionesInhabilitada
SóloLectura
Lectura yescritura
Modolocal o
supervisor
ÍndiceSeguridad Y4 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerradoEn alarma
ÍndiceSeguridad Y5 0 = No Habilitada
1 = Cont. abierto2 = Cont. cerrado
En alarma
Valor forzamiento Y1Loop A (9)0…100% salida
Input shift entrada X1-60…60 digit
Polarización (Bias) del Setpoint Loop A(si habilitado) -100…200 % c.s.
Relación (Ratio) delSet point Loop A(si habilitado) -9.99…10.00
Límite inferior Set pointLoop BInicio escala…s.p.h.b.
Límite superior Set pointLoop Bs.p.I.b.…fondo escala
Mínimo valor Y1 Loop B0…90% salida
Máximo valor Y1 Loop B10…100% salida
Valor seguridad Y1 Loop B0…100% salida
NO
SÍ
ZpAss.>
P2222
ZA.par.
> PSSS1
ZA.tu.
> PSSS9
ZsCIS
> PSSS1
ZAddr.
> PIN.SCALA
Zs.p.l.I.
> PF. SCALA
Zs.p.l.h.
> PIN.SCALA
Zs.p.I..b
> PF. SCALA
Zs.p.h.b
>
6
37
H
W 1
IWI
H
IWI
T
H
W
8888Z----
8888Z____
H
W 1
W
Zs.p. 1
Zs.p. 2
Zs.p. 3
Zs1. u.
Zs1. d.
Zy2s.p..
Zy3s.p..
Zy4.5.p..
Zy55.p.
Zs1.u.b
Zs1.d.b
Zy2Hy..
Zy3Hy..
Zy4Hy..
Zy5Hy.
H
W 1
W
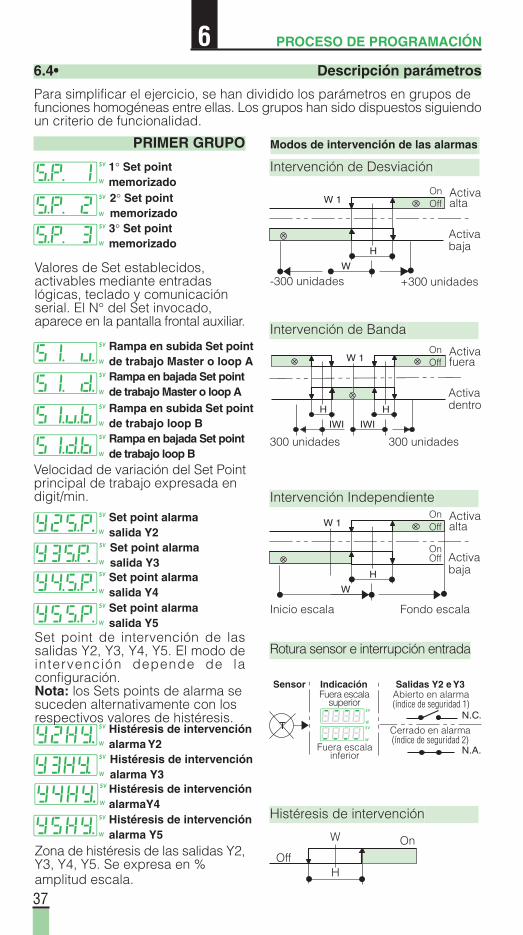
Histéresis de intervención
Rotura sensor e interrupción entrada
Intervención Independiente
PRIMER GRUPO
6.4• Descripción parámetros
1° Set pointmemorizado
Valores de Set establecidos,activables mediante entradaslógicas, teclado y comunicaciónserial. El N° del Set invocado,aparece en la pantalla frontal auxiliar.
2° Set pointmemorizado3° Set pointmemorizado
Rampa en subida Set pointde trabajo Master o loop ARampa en bajada Set pointde trabajo Master o loop A
Para simplificar el ejercicio, se han dividido los parámetros en grupos defunciones homogéneas entre ellas. Los grupos han sido dispuestos siguiendoun criterio de funcionalidad.
Set point alarmasalida Y2Set point alarmasalida Y3Set point alarmasalida Y4Set point alarmasalida Y5
Fuera escalasuperior
Fuera escalainferior
Indicación Salidas Y2 e Y3SensorAbierto en alarma(índice de seguridad 1)
Cerrado en alarma(índice de seguridad 2)
N.C.
N.A.
Inicio escala Fondo escala
Activaalta
Activabaja
Activafuera
Activadentro
Intervención de Banda
Rampa en subida Set pointde trabajo loop BRampa en bajada Set pointde trabajo loop B
Velocidad de variación del Set Pointprincipal de trabajo expresada endigit/min.
Set point de intervención de lassalidas Y2, Y3, Y4, Y5. El modo deintervención depende de laconfiguración.Nota: los Sets points de alarma sesuceden alternativamente con losrespectivos valores de histéresis.
Histéresis de intervenciónalarma Y2Histéresis de intervenciónalarma Y3Histéresis de intervenciónalarmaY4Histéresis de intervenciónalarma Y5
Zona de histéresis de las salidas Y2,Y3, Y4, Y5. Se expresa en %amplitud escala.
Activaalta
Activabaja
Modos de intervención de las alarmas
Intervención de Desviación
300 unidades 300 unidades
-300 unidades +300 unidades
OnOff
OnOff
OnOff
OnOff
Off
On
PROCESO DE PROGRAMACIÓN
6
38
yh.C.yh.
0100% 100%0
W
d.b. P.b. / r.c.rP.b.
Effetto del filtro
Zd.b.SS
Zp.b.
Zp.b. s.
ZZp.b. b.
Zt.i.
Zt.i. s.
Zt.i. b.
ZZt.d.
Zt.d. s.
Zt.d. b.
Zr.y.
Zr.y. s.
Zr.y.. b.
Zf.int.
Zt.c.
Zt.c. C.
Zt.c. b.
Zr.c.r.S
Zt.y.SS
Zdy.SS
Zpot.I.
ZHy.
PROCESO DE PROGRAMACIÓN
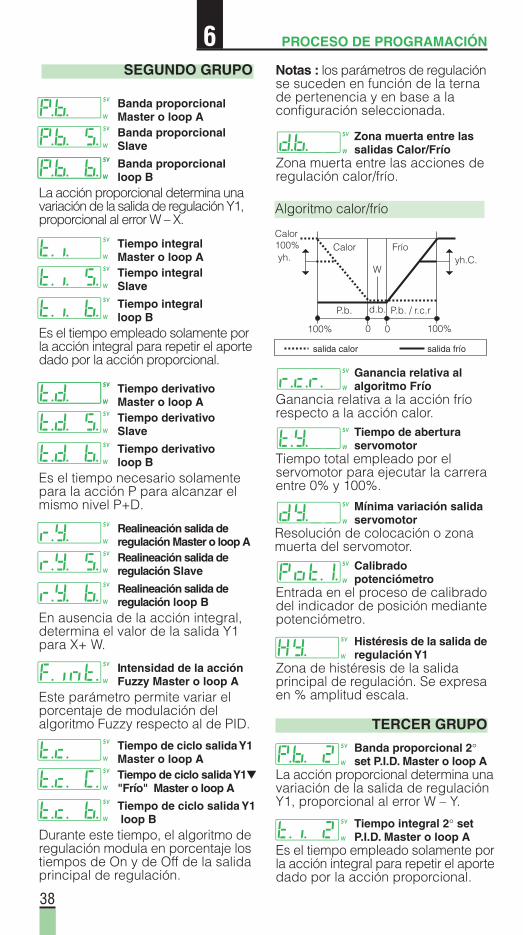
SEGUNDO GRUPO
Calor FríoCalor100%
Algoritmo calor/frío
salida fríosalida calor
TERCER GRUPO
Notas : los parámetros de regulaciónse suceden en función de la ternade pertenencia y en base a laconfiguración seleccionada.
Zona muerta entre lassalidas Calor/Frío
Zona muerta entre las acciones deregulación calor/frío.
Banda proporcionalMaster o loop ABanda proporcionalSlave
Banda proporcionalloop B
La acción proporcional determina unavariación de la salida de regulación Y1,proporcional al error W – X.
Tiempo integralMaster o loop ATiempo integralSlave
Tiempo integralloop B
Es el tiempo empleado solamente porla acción integral para repetir el aportedado por la acción proporcional.
Tiempo derivativoMaster o loop ATiempo derivativoSlave
Tiempo derivativoloop B
Es el tiempo necesario solamentepara la acción P para alcanzar elmismo nivel P+D.
Realineación salida deregulación Master o loop ARealineación salida deregulación Slave
Realineación salida deregulación loop B
En ausencia de la acción integral,determina el valor de la salida Y1para X+ W.
Intensidad de la acciónFuzzy Master o loop A
Este parámetro permite variar elporcentaje de modulación delalgoritmo Fuzzy respecto al de PID.
Tiempo de ciclo salida Y1Master o loop ATiempo de ciclo salida Y1"Frío" Master o loop A
Tiempo de ciclo salida Y1 loop B
Durante este tiempo, el algoritmo deregulación modula en porcentaje lostiempos de On y de Off de la salidaprincipal de regulación.
Ganancia relativa alalgoritmo Frío
Ganancia relativa a la acción fríorespecto a la acción calor.
Tiempo de aberturaservomotor
Tiempo total empleado por elservomotor para ejecutar la carreraentre 0% y 100%.
Mínima variación salidaservomotor
Resolución de colocación o zonamuerta del servomotor.
Calibradopotenciómetro
Entrada en el proceso de calibradodel indicador de posición mediantepotenciómetro.
Histéresis de la salida deregulación Y1
Zona de histéresis de la salidaprincipal de regulación. Se expresaen % amplitud escala.
Banda proporcional 2°set P.I.D. Master o loop A
La acción proporcional determina unavariación de la salida de regulaciónY1, proporcional al error W – Y.
Tiempo integral 2° setP.I.D. Master o loop A
Es el tiempo empleado solamente porla acción integral para repetir el aportedado por la acción proporcional.
Zp.b. 2
Zt.i. 2
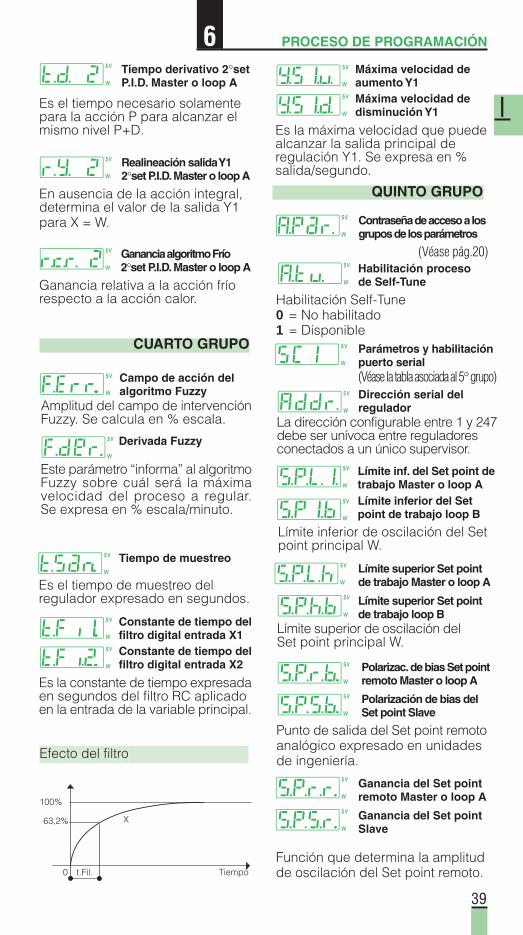
6
39
100%
0
X63,2%
t.Fil.
Zt.d. 2
Zr.c.r. 2
Zf.der..
Zt.san...
Zf.Err.....
Zt.fi1....
Zt.fi.2....
Zy.sI.u.
Zy.sI.d.
ZA.tu..S
ZsC1S
Zs.p.l.h
Zs.p.r.b....
ZA.par.
Zs.p.r.r...
Zs.pI.b
Zs.p.h.b
Zs.p.s.b...
Zs.p.s.r...
PROCESO DE PROGRAMACIÓN
Tiempo
Efecto del filtro
CUARTO GRUPO
Es el tiempo necesario solamentepara la acción P para alcanzar elmismo nivel P+D.
Tiempo derivativo 2°setP.I.D. Master o loop A
I
En ausencia de la acción integral,determina el valor de la salida Y1para X = W.
Realineación salida Y12°set P.I.D. Master o loop A
Ganancia relativa a la acción fríorespecto a la acción calor.
Ganancia algoritmo Frío2°set P.I.D. Master o loop A
Constante de tiempo delfiltro digital entrada X1
Es la constante de tiempo expresadaen segundos del filtro RC aplicadoen la entrada de la variable principal.
Amplitud del campo de intervenciónFuzzy. Se calcula en % escala.
Derivada Fuzzy
Este parámetro “informa” al algoritmoFuzzy sobre cuál será la máximavelocidad del proceso a regular.Se expresa en % escala/minuto.
Tiempo de muestreo
Es el tiempo de muestreo delregulador expresado en segundos.
Campo de acción delalgoritmo Fuzzy
Constante de tiempo delfiltro digital entrada X2
Máxima velocidad deaumento Y1
Es la máxima velocidad que puedealcanzar la salida principal deregulación Y1. Se expresa en %salida/segundo.
Máxima velocidad dedisminución Y1
QUINTO GRUPO
Contraseña de acceso a losgrupos de los parámetros
(Véase pág.20)
Habilitación Self-Tune0 = No habilitado1 = Disponible
Habilitación procesode Self-Tune
Parámetros y habilitaciónpuerto serial(Véase la tabla asociada al 5° grupo)Dirección serial delregulador
La dirección configurable entre 1 y 247debe ser unívoca entre reguladoresconectados a un único supervisor.
Límite inf. del Set point detrabajo Master o loop A
Límite superior Set pointde trabajo Master o loop A
Límite inferior de oscilación del Setpoint principal W.
Límite superior de oscilación delSet point principal W.
Polarizac. de bias Set pointremoto Master o loop A
Ganancia del Set pointremoto Master o loop A
Punto de salida del Set point remotoanalógico expresado en unidadesde ingeniería.
Función que determina la amplitudde oscilación del Set point remoto.
Límite inferior del Setpoint de trabajo loop B
Límite superior Set pointde trabajo loop B
Polarización de bias delSet point Slave
Ganancia del Set pointSlave
Zr.y. 2
ZAddr.
Zs.p.l.1.
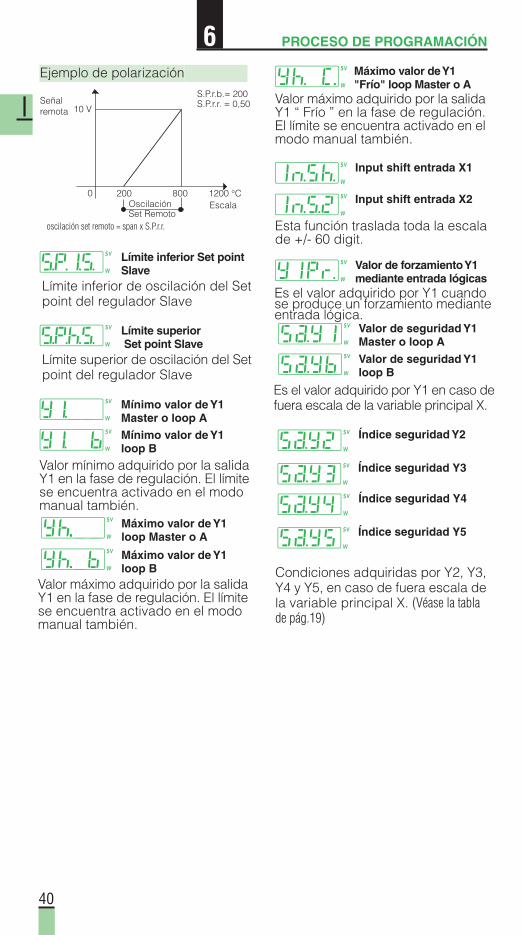
6
40
10 V
0 1200 °C200 800
S.P.r.b.= 200S.P.r.r. = 0,50
Zy1.SS
Zyh. C..
Z1n.sh.
Zyh......SS
Zsa.y1
Zsa.y2
Zsa.y3
Zs.p.I.s.
Zs.p.h.s.
ZyI. b
Zyh......Sb
Z1n.s.2
ZyIpr.
Zsa.yb
Zsa.y4
Zsa.y5
oscilación set remoto = span x S.P.r.r.
Ejemplo de polarización
Señalremota
EscalaOscilaciónSet Remoto
PROCESO DE PROGRAMACIÓN
Mínimo valor de Y1Master o loop A
Valor máximo adquirido por la salidaY1 en la fase de regulación. El límitese encuentra activado en el modomanual también.
Máximo valor de Y1"Frío" loop Master o A
Valor mínimo adquirido por la salidaY1 en la fase de regulación. El límitese encuentra activado en el modomanual también.
Máximo valor de Y1loop Master o A
Valor máximo adquirido por la salidaY1 “ Frío ” en la fase de regulación.El límite se encuentra activado en elmodo manual también.
Input shift entrada X1
Valor de seguridad Y1Master o loop A
Índice seguridad Y2
Índice seguridad Y3
Esta función traslada toda la escalade +/- 60 digit.
Es el valor adquirido por Y1 en caso defuera escala de la variable principal X.
Condiciones adquiridas por Y2, Y3,Y4 y Y5, en caso de fuera escala dela variable principal X. (Véase la tablade pág.19)
Límite inferior Set pointSlave
Límite inferior de oscilación del Setpoint del regulador Slave
Límite superior Set point Slave
Límite superior de oscilación del Setpoint del regulador Slave
Mínimo valor de Y1loop B
Máximo valor de Y1loop B
Input shift entrada X2
Es el valor adquirido por Y1 cuandose produce un forzamiento medianteentrada lógica.
Valor de forzamiento Y1mediante entrada lógicas
Valor de seguridad Y1loop B
Índice seguridad Y4
Índice seguridad Y5
I
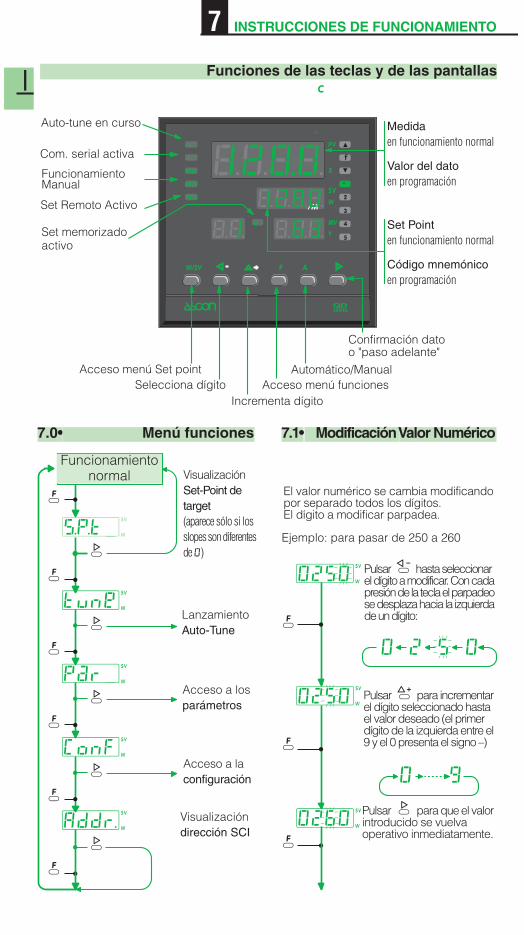
7
SERIESQD
4
5
PID
1
°
F
2
3
°
C
Y
WSV
X
PV
REM
FW/SV A
/M
MV
MAN
SCI
AT
W
X
Zs.p.tS
>
X
Ztune
>
X
ZparS
>
X
ZConf
>
X
ZAddr.
>
X
0 2 5L 0
0 9
Z025OL
X
Z025L0
X
Z026L0
X
Funcionamientonormal
I
INSTRUCCIONES DE FUNCIONAMIENTO
Funciones de las teclas y de las pantallas
7.1• Modificación Valor Numérico7.0• Menú funciones
LanzamientoAuto-Tune
Acceso a losparámetros
Acceso a laconfiguración
Visualizacióndirección SCI
VisualizaciónSet-Point detarget(aparece sólo si losslopes son diferentesde 0)
El valor numérico se cambia modificandopor separado todos los dígitos.El dígito a modificar parpadea.
Pulsar < hasta seleccionarel dígito a modificar. Con cadapresión de la tecla el parpadeose desplaza hacia la izquierdade un dígito:
Ejemplo: para pasar de 250 a 260
Pulsar + para incrementarel dígito seleccionado hastael valor deseado (el primerdígito de la izquierda entre el9 y el 0 presenta el signo –)
Pulsar > para que el valorintroducido se vuelvaoperativo inmediatamente.
Automático/ManualAcceso menú funciones
Auto-tune en curso
Com. serial activa
FuncionamientoManual
Set Remoto Activo
Set memorizadoactivo
Acceso menú Set pointSelecciona dígito
Incrementa dígito
Medidaen funcionamiento normal
Valor del datoen programación
Set Pointen funcionamiento normal
Código mnemónicoen programación
Confirmación datoo "paso adelante"
I
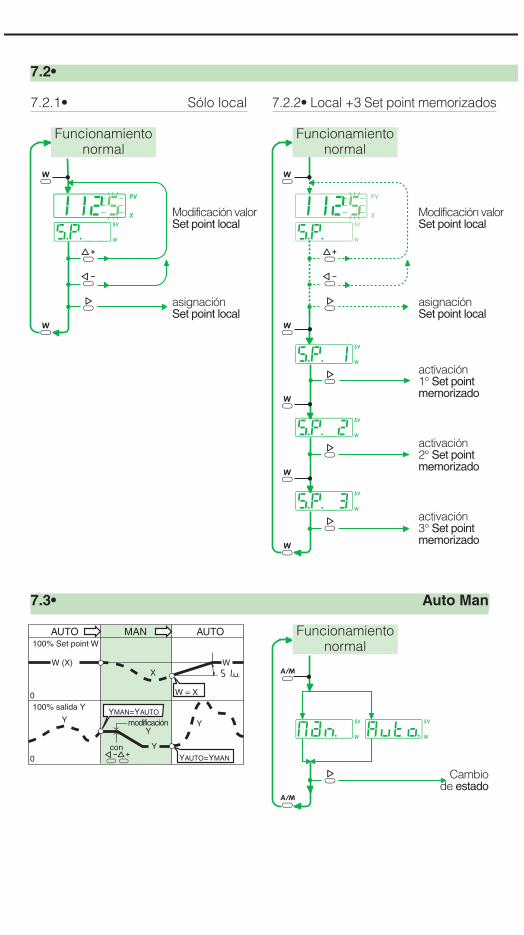
W
Q1125LZs.p.
+
<
>
W
Zs.p.S1
>
W
Zs.p.S2
>
W
Zs.p.S3
>
W
Y
ZMan. ZAuto.
>
Y
W
Q1125LZs.p.SS
+
<
>
W
AUTO AUTO
W = X
YAUTO=YMAN
YMAN=YAUTO
W (X) W
Y
Y
Y
0
0
MAN
X sI.u.
<+
7.2•
7.3• Auto Man
asignaciónSet point local
Modificación valorSet point local
Funcionamientonormal
Funcionamientonormal
7.2.1• Sólo local 7.2.2• Local +3 Set point memorizados
activación1° Set pointmemorizado
activación2° Set pointmemorizado
activación3° Set pointmemorizado
Cambiode estado
Funcionamientonormal100% Set point W
modificaciónY
con
100% salida Y
asignaciónSet point local
Modificación valorSet point local
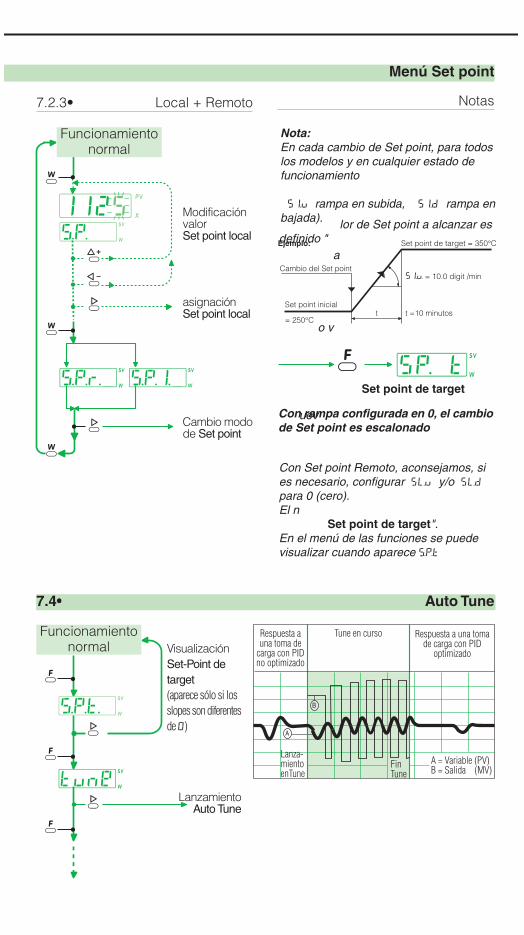
A
B
W
Q1125LZs.p.
+
<
>
W
Zs.p.r.S Zs.p.I.S
>
W
X
Zs.p.t.
>
X
Ztune
>
X
X
t
Zsp. t
Menú Set point
7.4• Auto Tune
Cambio modode Set point
Funcionamientonormal
7.2.3• Local + Remoto
Nota:En cada cambio de Set point, para todoslos modelos y en cualquier estado defuncionamiento
sI.u rampa en subida, sI.d rampa enbajada).
Set point de target
Con rampa configurada en 0, el cambiode Set point es escalonado
Con Set point Remoto, aconsejamos, sies necesario, configurar sl.u y/o sl.dpara 0 (cero).El n
uev
o v
a
lor de Set point a alcanzar esdefinido "
Set point de target".En el menú de las funciones se puedevisualizar cuando aparece s.p.t
Respuesta auna toma de
carga con PIDno optimizado
Tune en curso
Lanza-mientoenTune
Respuesta a una tomade carga con PID
optimizado
FinTune
A = Variable (PV)B = Salida (MV)
LanzamientoAuto Tune
VisualizaciónSet-Point detarget(aparece sólo si losslopes son diferentesde 0)
Funcionamientonormal
Cambio del Set point
Set point de target = 350°C
t =10 minutosSet point inicial
= 250°C
Ejemplo:
sI.u. = 10.0 digit /min
Notas
asignaciónSet point local
ModificaciónvalorSet point local
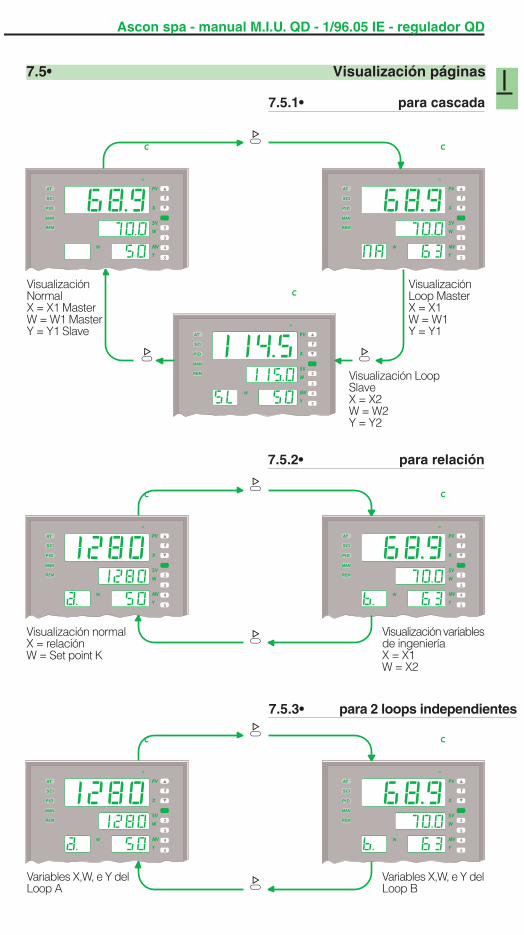
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
114.5115.0
50sl
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
68.9 70.0
50
>
>
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
68.9 70.0
63MA
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
12801280
50a.
>
>
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
68.9 70.0
63b.
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
12801280
50a.
>
>
4
5
PID
1
°
F
2
3
°
C
REM
MAN
SCI
AT
Y
WSV
X
PV
MVW
68.9 70.0
63b.
>
Ascon spa - manual M.I.U. QD - 1/96.05 IE - regulador QD
I7.5• Visualización páginas
7.5.1• para cascada
7.5.2• para relación
7.5.3• para 2 loops independientes
VisualizaciónNormalX = X1 MasterW = W1 MasterY = Y1 Slave
VisualizaciónLoop MasterX = X1W = W1Y = Y1
Visualización normalX = relaciónW = Set point K
Visualización variablesde ingenieríaX = X1W = X2
Variables X,W, e Y delLoop A
Variables X,W, e Y delLoop B
Visualización LoopSlaveX = X2W = W2Y = Y2
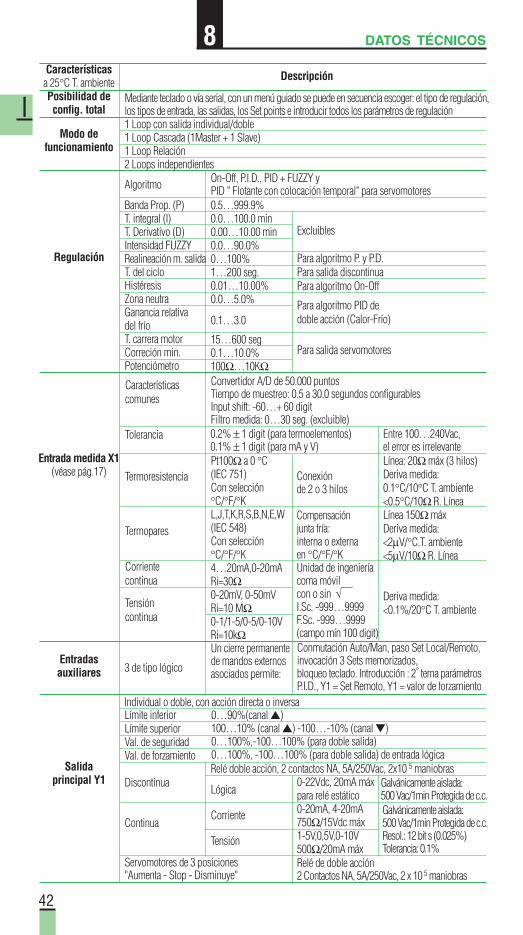
8
42
DATOS TÉCNICOS
Descripción
Pt100Ω a 0 °C(IEC 751)Con selección°C/°F/°KL,J,T,K,R,S,B,N,E,W(IEC 548)Con selección°C/°F/°K4…20mA,0-20mARi=30Ω0-20mV, 0-50mVRi=10 MΩ0-1/1-5/0-5/0-10VRi=10kΩ
Conexiónde 2 o 3 hilos
Compensaciónjunta fría:interna o externaen °C/°F/°KUnidad de ingenieríacoma móvilcon o sin √—
I.Sc. -999…9999F.Sc. -999…9999(campo mín 100 digit)
Línea: 20Ω máx (3 hilos)Deriva medida:0.1°C/10°C T. ambiente<0.5°C/10Ω R. LíneaLínea 150Ω máxDeriva medida:<2µV/°C.T. ambiente<5µV/10Ω R. Línea
Deriva medida:<0.1%/20°C T. ambiente
3 de tipo lógico
Un cierre permanentede mandos externosasociados permite:
Conmutación Auto/Man, paso Set Local/Remoto,invocación 3 Sets memorizados,bloqueo teclado. Introducción : 2° terna parámetrosP.I.D., Y1 = Set Remoto, Y1 = valor de forzamiento
Individual o doble, con acción directa o inversaLímite inferiorLímite superiorVal. de seguridadVal. de forzamiento
Discontinua
Continua
0…90%(canal )100…10% (canal ) -100…-10% (canal )0…100%,-100…100% (para doble salida)0…100%, -100…100% (para doble salida) de entrada lógica
0-22Vdc, 20mA máxpara relé estático0-20mA, 4-20mA750Ω/15Vdc máx1-5V,0,5V,0-10V500Ω/20mA máx
Galvánicamente aislada:500 Vac/1min Protegida de c.c.Resol.: 12 bit s (0.025%)Tolerancia: 0.1%
Servomotores de 3 posiciones"Aumenta - Stop - Disminuye"
Lógica
Corriente
Tensión
Relé de doble acción2 Contactos NA, 5A/250Vac, 2 x 10 5 maniobras
Característicascomunes
Tolerancia
Termoresistencia
Termopares
Corrientecontinua
Tensióncontinua
Característicasa 25°C T. ambientePosibilidad deconfig. total
Modo defuncionamiento
Regulación
Entrada medida X1(véase pág.17)
Entradasauxiliares
Salidaprincipal Y1
On-Off, P.I.D., PID + FUZZY yPID " Flotante con colocación temporal" para servomotoresAlgoritmo
0.5…999.9%0.0…100.0 min0.00…10.00 min0.0…90.0%0…100%1…200 seg.0.01…10.00%0.0…5.0%
0.1…3.0
15…600 seg0.1…10.0%100Ω…10KΩ
Excluibles
Para algoritmo P. y P.D.Para salida discontinuaPara algoritmo On-Off
Para algoritmo PID dedoble acción (Calor-Frío)
Para salida servomotores
Banda Prop. (P)T. integral (I)T. Derivativo (D)Intensidad FUZZYRealineación m. salidaT. del cicloHistéresisZona neutraGanancia relativadel fríoT. carrera motorCorreción min.Potenciómetro
0.2% ± 1 digit (para termoelementos)0.1% ± 1 digit (para mA y V)
Convertidor A/D de 50.000 puntosTiempo de muestreo: 0.5 a 30.0 segundos configurablesInput shift: -60…+ 60 digitFiltro medida: 0…30 seg. (excluible)
Entre 100…240Vac,el error es irrelevante
Mediante teclado o vía serial, con un menú guiado se puede en secuencia escoger: el tipo de regulación,los tipos de entrada, las salidas, los Set points e introducir todos los parámetros de regulación1 Loop con salida individual/doble1 Loop Cascada (1Master + 1 Slave)1 Loop Relación2 Loops independientes
Relé doble acción, 2 contactos NA, 5A/250Vac, 2x10 5 maniobrasGalvánicamente aislada:500 Vac/1min Protegida de c.c.
I
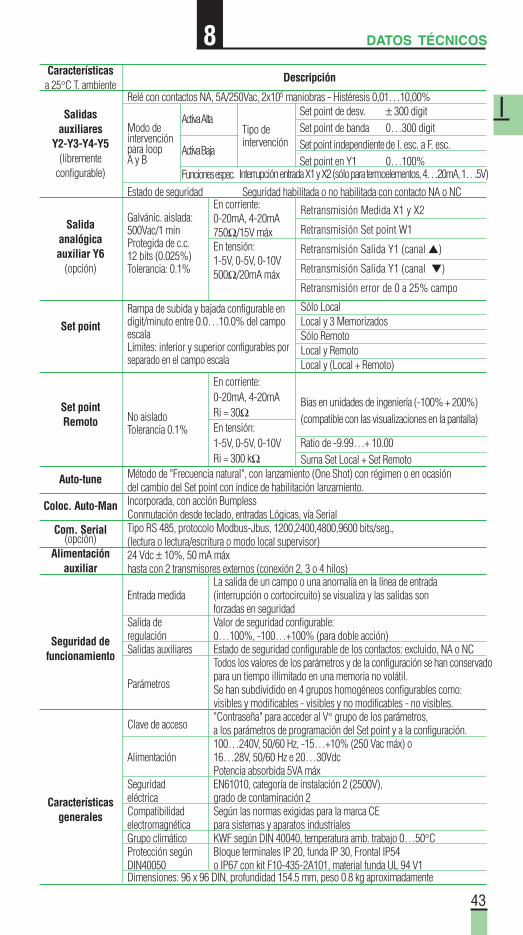
8
43
DATOS TÉCNICOS
± 300 digit0…300 digitde I. esc. a F. esc.0…100%
Set point de desv.Set point de bandaSet point independienteSet point en Y1
Relé con contactos NA, 5A/250Vac, 2x105 maniobras - Histéresis 0,01…10,00%
Galvánic. aislada:500Vac/1 minProtegida de c.c.12 bits (0.025%)Tolerancia: 0.1%
En corriente:0-20mA, 4-20mA750Ω/15V máxEn tensión:1-5V, 0-5V, 0-10V500Ω/20mA máx
Retransmisión Medida X1 y X2
Retransmisión Set point W1
Retransmisión Salida Y1 (canal )
Retransmisión Salida Y1 (canal )
Retransmisión error de 0 a 25% campo
Modo deintervenciónpara loopA y B
Activa Alta
Activa Baja
Funciones espec.
Tipo deintervención
Interrupción entrada X1 y X2 (sólo para termoelementos, 4…20mA, 1…5V)
Rampa de subida y bajada configurable endigit/minuto entre 0.0…10.0% del campoescalaLímites: inferior y superior configurables porseparado en el campo escala
No aisladoTolerancia 0.1%
En corriente:0-20mA, 4-20mARi = 30ΩEn tensión:1-5V, 0-5V, 0-10VRi = 300 kΩ
Método de "Frecuencia natural", con lanzamiento (One Shot) con régimen o en ocasióndel cambio del Set point con índice de habilitación lanzamiento.Incorporada, con acción BumplessConmutación desde teclado, entradas Lógicas, vía SerialTipo RS 485, protocolo Modbus-Jbus, 1200,2400,4800,9600 bits/seg.,(lectura o lectura/escritura o modo local supervisor)24 Vdc ± 10%, 50 mA máxhasta con 2 transmisores externos (conexión 2, 3 o 4 hilos)
Entrada medida
Salida deregulaciónSalidas auxiliares
Parámetros
Clave de acceso
Alimentación
SeguridadeléctricaCompatibilidadelectromagnéticaGrupo climáticoProtección segúnDIN40050
La salida de un campo o una anomalía en la línea de entrada(interrupción o cortocircuito) se visualiza y las salidas sonforzadas en seguridadValor de seguridad configurable:0…100%, -100…+100% (para doble acción)Estado de seguridad configurable de los contactos: excluido, NA o NCTodos los valores de los parámetros y de la configuración se han conservadopara un tiempo illimitado en una memoria no volátil.Se han subdividido en 4 grupos homogéneos configurables como:visibles y modificables - visibles y no modificables - no visibles."Contraseña" para acceder al V° grupo de los parámetros,a los parámetros de programación del Set point y a la configuración.100…240V, 50/60 Hz, -15…+10% (250 Vac máx) o16…28V, 50/60 Hz e 20…30VdcPotencia absorbida 5VA máxEN61010, categoría de instalación 2 (2500V),grado de contaminación 2Según las normas exigidas para la marca CEpara sistemas y aparatos industrialesKWF según DIN 40040, temperatura amb. trabajo 0…50°CBloque terminales IP 20, funda IP 30, Frontal IP54o IP67 con kit F10-435-2A101, material funda UL 94 V1
Dimensiones: 96 x 96 DIN, profundidad 154.5 mm, peso 0.8 kg aproximadamente
Descripción
Seguridad habilitada o no habilitada con contacto NA o NCEstado de seguridad
Característicasa 25°C T. ambiente
Salidasauxiliares
Y2-Y3-Y4-Y5(libremente
configurable)
Salidaanalógicaauxiliar Y6
(opción)
Set point
Set pointRemoto
Auto-tune
Coloc. Auto-Man
Com. Serial(opción)
Alimentaciónauxiliar
Seguridad defuncionamiento
Característicasgenerales
Bias en unidades de ingeniería (-100% + 200%)(compatible con las visualizaciones en la pantalla)
I
Sólo LocalLocal y 3 MemorizadosSólo RemotoLocal y RemotoLocal y (Local + Remoto)
Ratio de -9.99…+ 10.00Suma Set Local + Set Remoto
44
I Los aparatos se garantizan exentes dedefectos de fabricación por un periodo de 1año a partir de la instalación y para un máximode 18 meses a partir de la fecha de entrega.La garantía no cubre los defectos ocasionadospor un uso diferente respecto al uso descritoen estas instrucciones de uso.
GARANTÍA
Se declara que este aparato es conforme alas normas sobre la compatibilidadelectromagnética para sistemas y aparatosindustriales y a las normas Seguridad eléctrica:EN 50081-2 norma genérica sobre
emisionesEN 50082-2 norma genérica
sobre la inmunidad.EN 61010 norma genérica
Seguridad Eléctrica
Conformidad normas CE




























