Embed Size (px)
Citation preview
Real-Time SystemsReal-Time Systems
Asst. Prof. Dr. Tolga AyavDepartment of Computer Engineering
İzmir Institute of TechnologyEmbedded Systems Lab

Agenda
Real-Time Systems RT Scheduling RT Kernels
RT-Linux
RT Executives DACOS
Study of Embedded Systems in COMPENG
İzmir Institute of Technology Embedded Systems Lab

Real-Time
Real-Time system is defined as a system where the correctness of the system depends not only the result of computations but also on the time at which it is produced. Therefore the timetime is the most important item to be managed.
İzmir Institute of Technology Embedded Systems Lab
Various Definitions
Hard, Soft, Firm Real-Time Embedded System Deterministic System Failed System Fault, Error, Failure Safety Critical System Fail-Safe System …
İzmir Institute of Technology Embedded Systems Lab

Real-Time Application
A real-time application is composed of a set of coordinated tasks:
Periodic Tasks: started at regular intervals and has to be completed before some deadline
A-periodic Tasks: appeared irregularly, but within a bounded frequency
Sporadic Tasks: their parameters are completely unknown
İzmir Institute of Technology Embedded Systems Lab

Defining a RT Task
We can use following quintuple to express a task:
b: begin time c: execution time f: frequency of a periodic task d: deadline
İzmir Institute of Technology Embedded Systems Lab
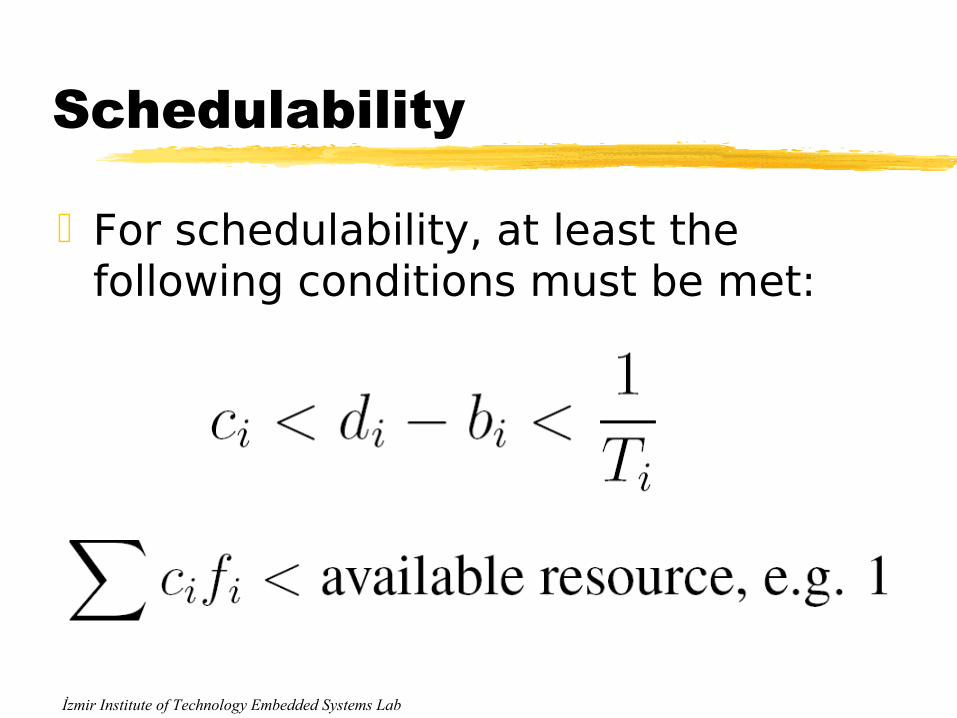
Schedulability
For schedulability, at least the following conditions must be met:
İzmir Institute of Technology Embedded Systems Lab
Task Categories
According to their time criticality:
Hard Real-Time Tasks Soft Real-Time Tasks Non Real-Time Tasks (Background Task)
İzmir Institute of Technology Embedded Systems Lab
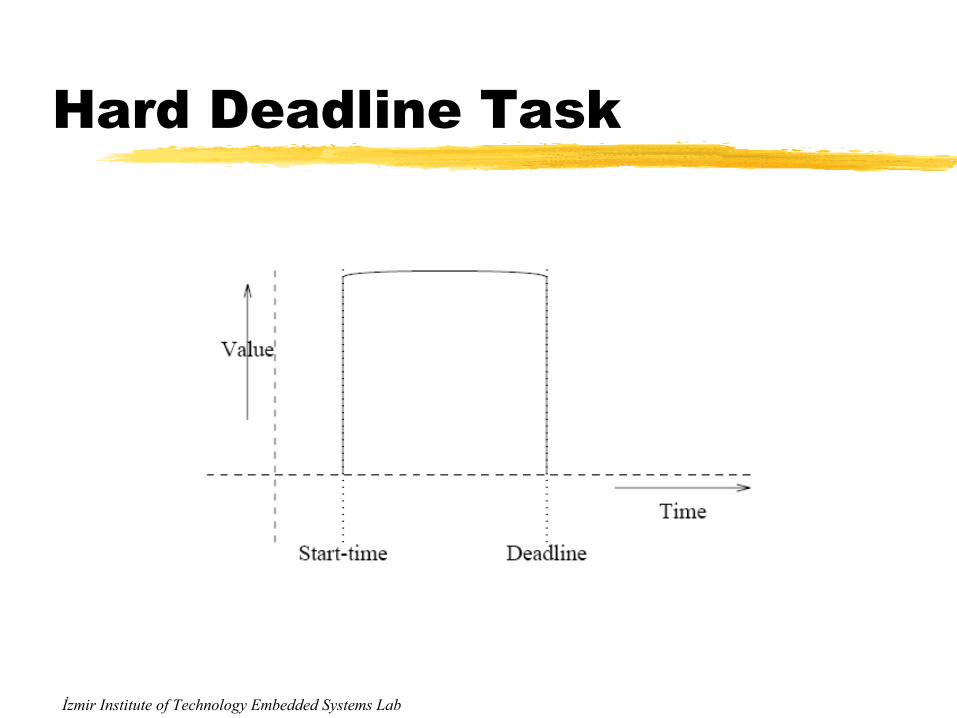
Hard Deadline Task
İzmir Institute of Technology Embedded Systems Lab
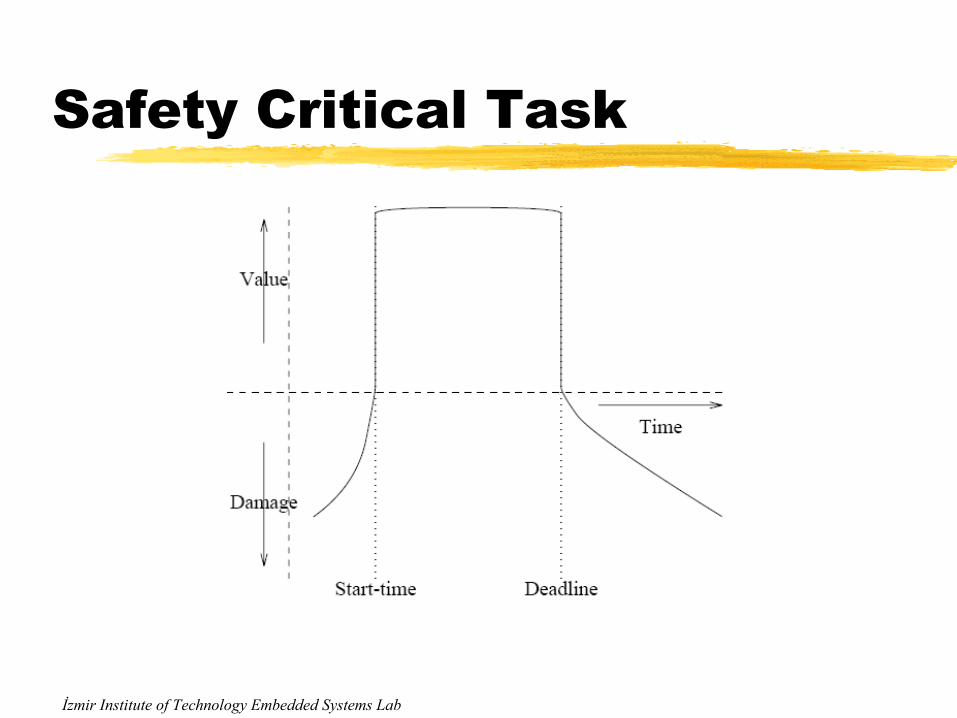
Safety Critical Task
İzmir Institute of Technology Embedded Systems Lab
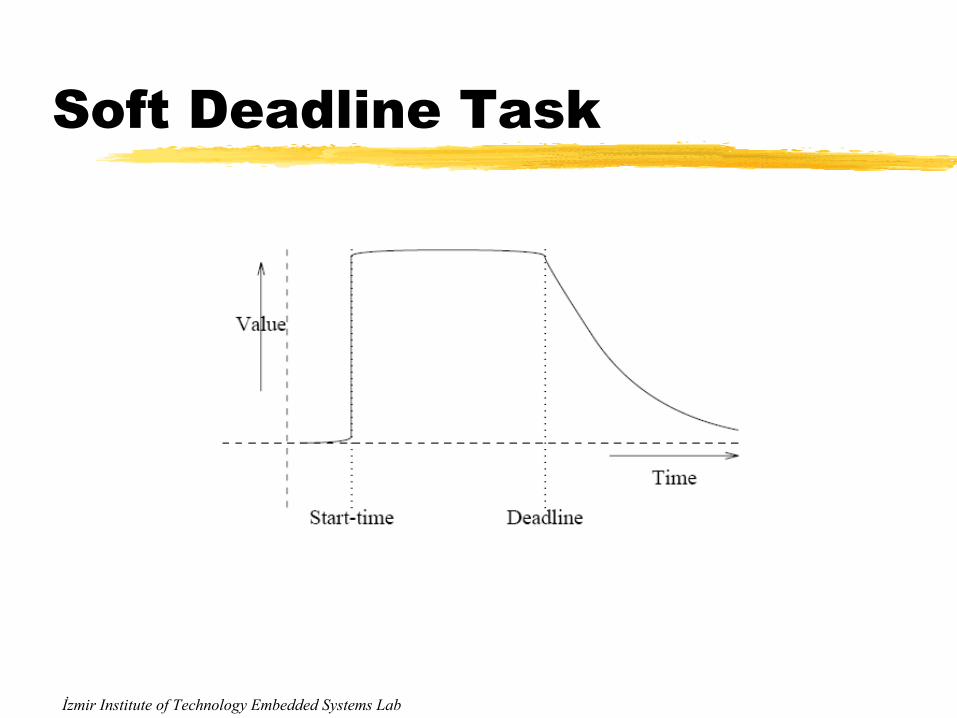
Soft Deadline Task
İzmir Institute of Technology Embedded Systems Lab
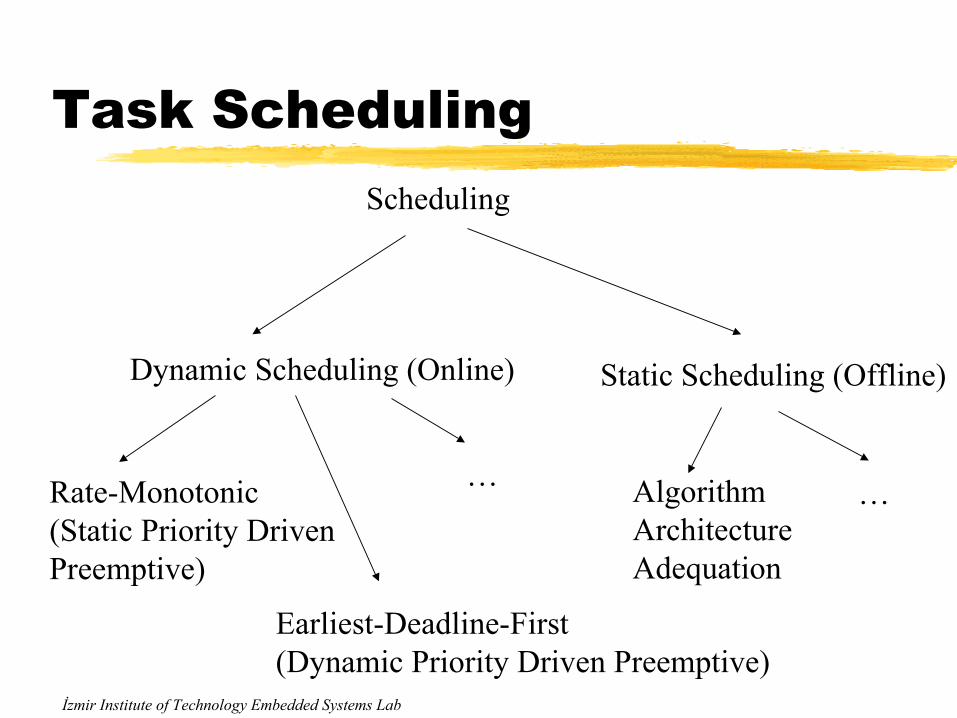
Task Scheduling
Dynamic Scheduling (Online) Static Scheduling (Offline)
Scheduling
Rate-Monotonic(Static Priority DrivenPreemptive)
Earliest-Deadline-First(Dynamic Priority Driven Preemptive)
AlgorithmArchitectureAdequation
……
İzmir Institute of Technology Embedded Systems Lab
Rate-Monotonic Scheduling (1)
Assumptions: Simple task model: No interprocess communication and all tasks
are periodic Tasks have priorities which are inversly proportional to their
periods. Tasks’ deadlines are equal to their periods. A high priority task may preempt lower priority tasks.
Liu and Layland (1973) proved that for a set of n periodic tasks with unique periods, a feasible schedule that will always meet deadlines exists if the CPU utilization is:
İzmir Institute of Technology Embedded Systems Lab

Rate-Monotonic Scheduling (2)
When number of tasks approaches to infinity, this utilization bound will converge to:
Task Execution Time
Period
τ1 1 8
τ2 2 5
τ3 2 10
Example:
Thus, the system is schedulable
İzmir Institute of Technology Embedded Systems Lab
Earliest-Deadline-First Alg.
Priorities are changed dynamically
Task with the earliest deadline gets the highest priority
Unless RM, utilization may go up to 100%
İzmir Institute of Technology Embedded Systems Lab

Example Scheduling
Three periodic tasks: A, B, C T is period, D is deadline and C is execution time uniprocessor
İzmir Institute of Technology Embedded Systems Lab
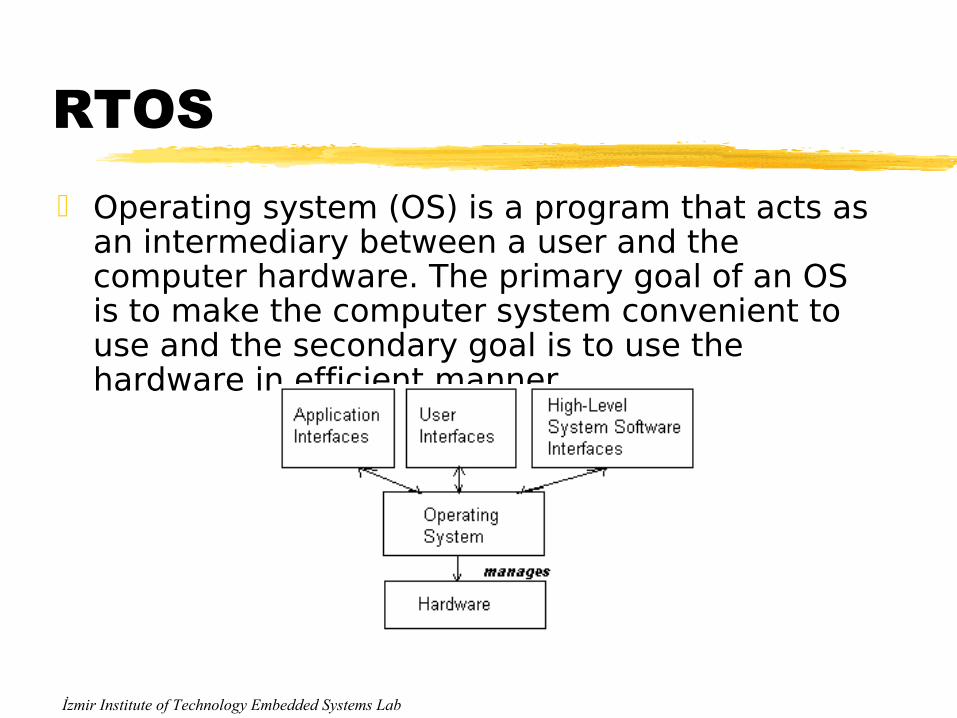
RTOS Operating system (OS) is a program that acts as
an intermediary between a user and the computer hardware. The primary goal of an OS is to make the computer system convenient to use and the secondary goal is to use the hardware in efficient manner
İzmir Institute of Technology Embedded Systems Lab
RTOS Requirements
Interrupt handling, guaranteed interrupt response Task (process) management (Support for scheduling of real-
time tasks and preemptive scheduling)
Interprocess communication and synchronization. Time management. Memory management I/O support (Support for communication with peripheral
devices via drivers) High speed data acquisition Resource management (User control of system resources) Error and exception handling
İzmir Institute of Technology Embedded Systems Lab
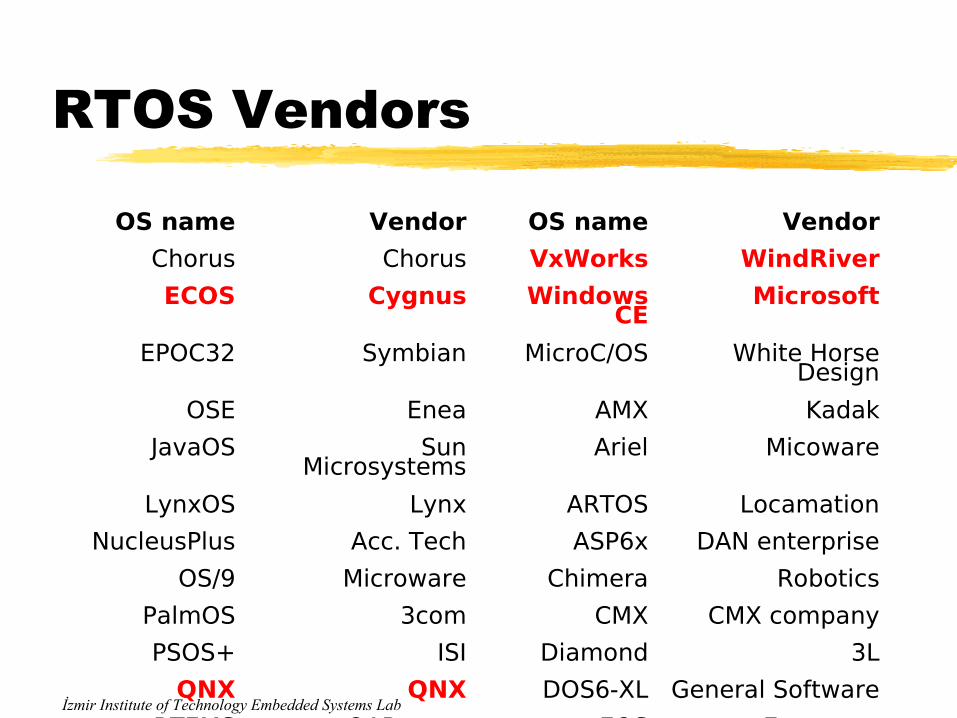
RTOS Vendors
OS name Vendor OS name Vendor
Chorus Chorus VxWorks WindRiver
ECOS Cygnus Windows CE
Microsoft
EPOC32 Symbian MicroC/OS White Horse Design
OSE Enea AMX Kadak
JavaOS Sun Microsystems
Ariel Micoware
LynxOS Lynx ARTOS Locamation
NucleusPlus Acc. Tech ASP6x DAN enterprise
OS/9 Microware Chimera Robotics
PalmOS 3com CMX CMX company
PSOS+ ISI Diamond 3L
QNX QNX DOS6-XL General Software
RTEMS OAR corp. EOS Etnoteam
VRTX Microtec EUROS Kanet
RT-Linux …
İzmir Institute of Technology Embedded Systems Lab

Linux Architecture
The standard LINUX kernel isn't a real-time kernel Some patches should be applied to fulfill the real-
time requirements
Carte Pulse
HARDWARE
System libraries
Drivers LINUX kernel
Hardware interruptsI/O
User’s task
İzmir Institute of Technology Embedded Systems Lab
RT-Linux Projects RT-Linux is an operating system, in which a small
real-time kernel co-exists with standard Linux kernel The real-time kernel sits between standard Linux kernel and the h/w. The standard Linux kernel sees this real-time layer as actual h/w The real-time kernel intercepts all hardware interrupts.
Only for those RTLinux-related interrupts, the appropriate ISR is run. All other interrupts are held and passed to the standard Linux
kernel as software interrupts when the standard Linux kernel runs.
The real-time kernel assigns the lowest priority to the standard Linux
kernel. Thus the realtime tasks will be executed in real-time Realtime tasks are privileged (that is, they have direct access to
hardware), and they do NOT use virtual memory.
İzmir Institute of Technology Embedded Systems Lab

Real-Time Linux Architecture
Hardware abstraction layer real-time interrupt dispatcher, real-time scheduler Inter processes communication services The patches available are: RTLinux, xenomai and RTAI (Real-Time Application
Interface)
Real-time plugin
System libraries
Linux kernelDrivers
I/O
I/O
Hardware interrupts
Software interrupts
Real Time task
User’s task
Real-time Scheduler
HARDWARE
İzmir Institute of Technology Embedded Systems Lab
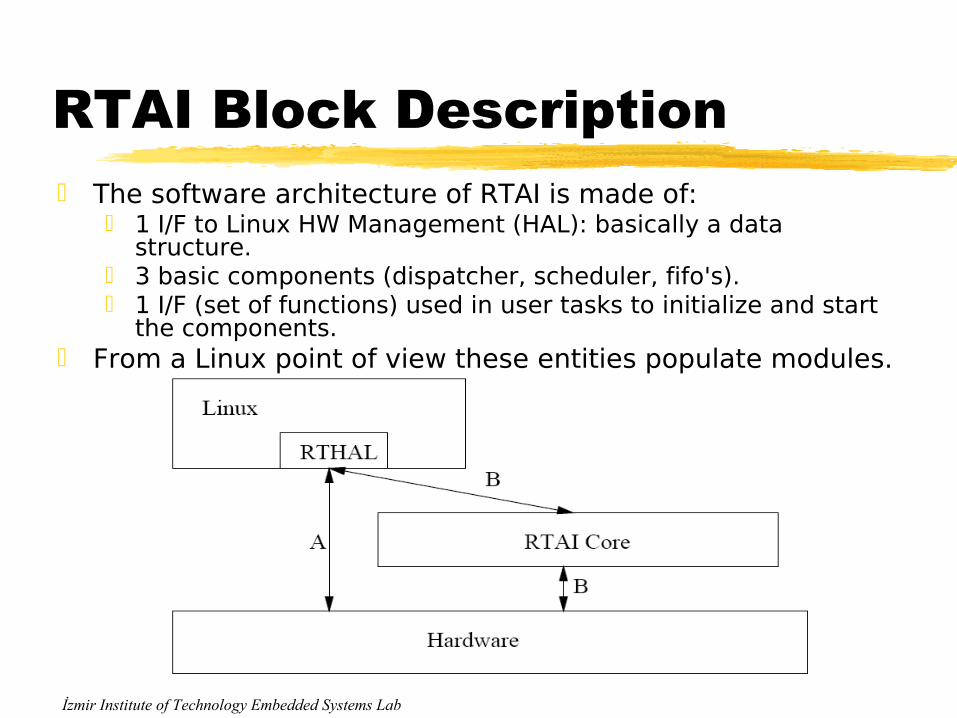
RTAI Block Description The software architecture of RTAI is made of:
1 I/F to Linux HW Management (HAL): basically a data structure.
3 basic components (dispatcher, scheduler, fifo's). 1 I/F (set of functions) used in user tasks to initialize and start
the components. From a Linux point of view these entities populate modules.
İzmir Institute of Technology Embedded Systems Lab
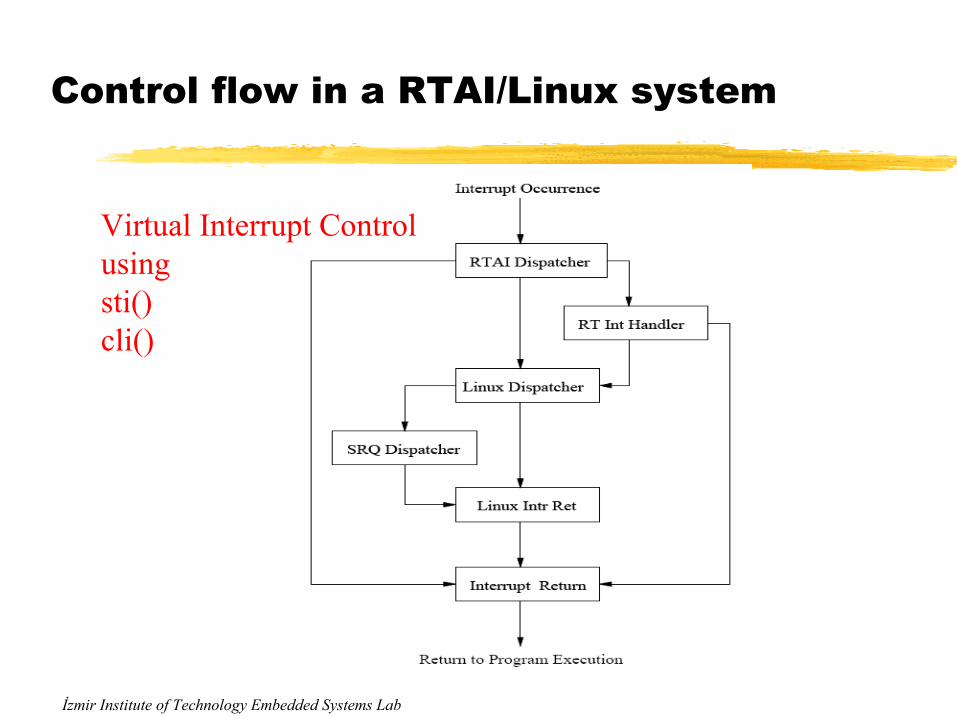
Control flow in a RTAI/Linux system
Virtual Interrupt Controlusingsti()cli()
İzmir Institute of Technology Embedded Systems Lab
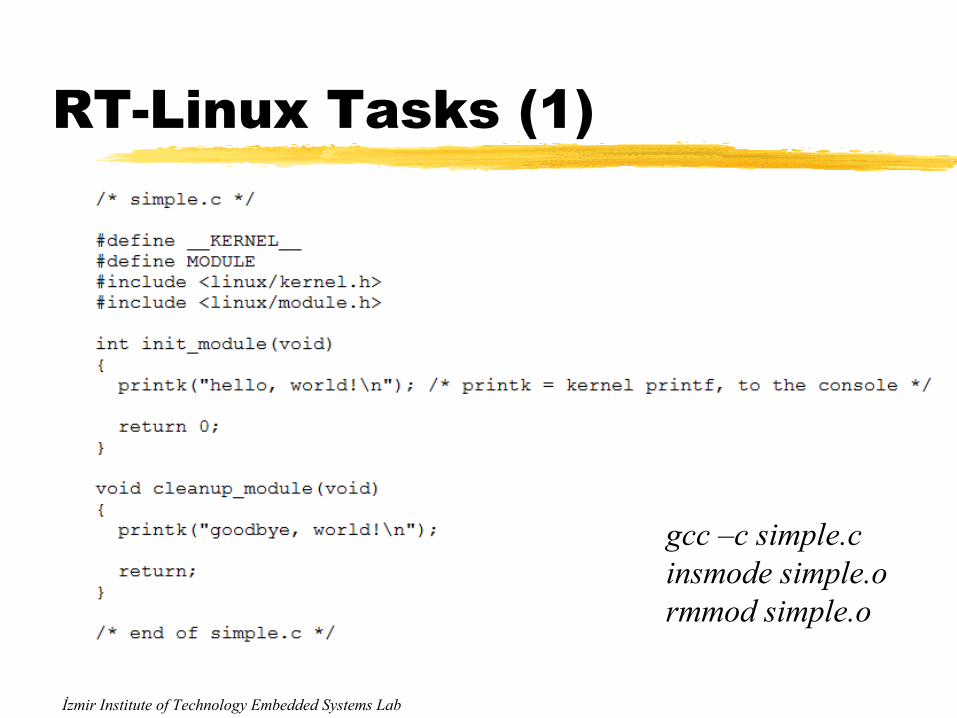
RT-Linux Tasks (1)
gcc –c simple.cinsmode simple.ormmod simple.o
İzmir Institute of Technology Embedded Systems Lab
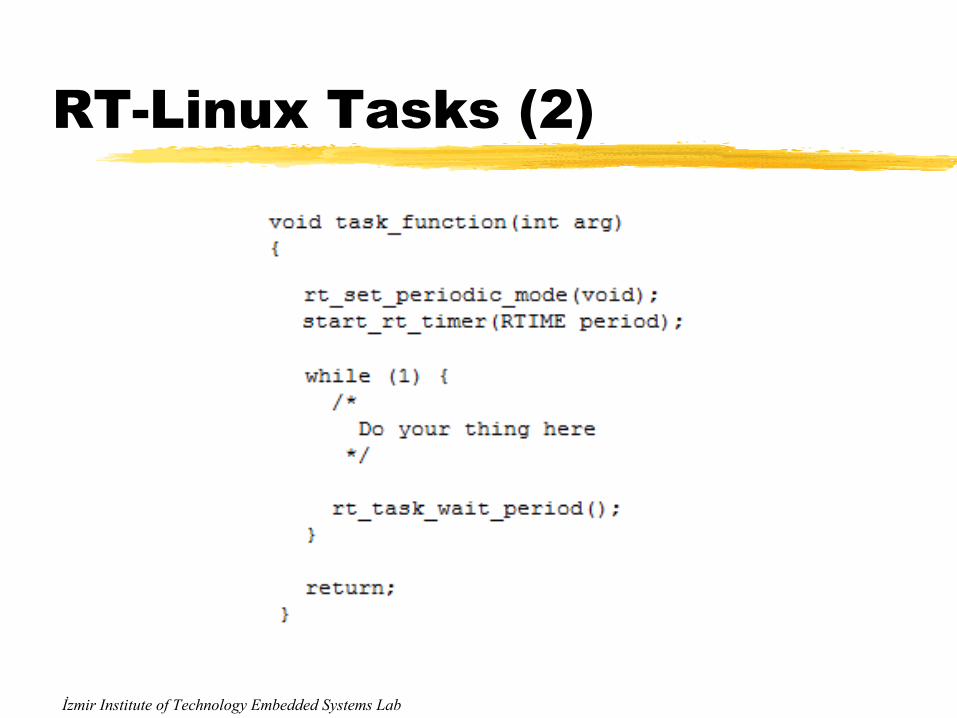
RT-Linux Tasks (2)
İzmir Institute of Technology Embedded Systems Lab
RTAI Project
For further information, installation details and various documents, please refer to:
www.rtai.org
İzmir Institute of Technology Embedded Systems Lab
Real-Time Executives
Simplified RTOS Not a real-time operating system
itself Usually has task scheduling and time
management functions May rely on other OSs, like DOS.
İzmir Institute of Technology Embedded Systems Lab
DACOS (Data Acquisition and Control Operating System)
It’s a real-time executive in fact. Runs on MS-DOS operating system. Most functions require a special
Hardware: DACES Supports:
Data Acquisition. Pipes, variables, processes. Periodic tasks.
İzmir Institute of Technology Embedded Systems Lab
DACOS Components custom.h : The definitions of the max numbers for tasks, pipes,
variables etc. dacos.h : All prototypes for functions and data structures used
by the real-time system. calls.h : The definitions for the system calls. defs.asm : Some definitions for the assembly functions. dacos.c : Almost all of the function implementations of the
real-time executive. kernel.asm : The assembly language routines providing task
switching which cannot be done well within C. main.c : Includes main function which does the initialization
of the executive and shell functions for interacting with user.
qcl -c -AL -Zi -Ox -Aw -Gs dacos.cqcl -c -AL -Zi -Ox -Aw -Gs main.cqcl -c -AL -Zi -Ox -Aw -Gs kernel.asmlink /co /stack:16384 dacos.obj kernel.obj main.obj, dac.exe
İzmir Institute of Technology Embedded Systems Lab
DACOS Features
Scheduling: Preemptive Round-Robin. Each task is given a fixed 500µs time slice.
Interprocess communication: Pipes and variables. DAC.EXE runs on DOS. It reads load.dac system
configuration file. The tasks are stored as procs/*.bin files.
Use DACES hardware: 16 channel analog inputs, 16 digital inputs and 16 digital outputs.
The executive DAC.EXE is only 127KB.
İzmir Institute of Technology Embedded Systems Lab
System Configuration File
pipe.name[string].size[unsigned integer].
var.name[string].initial_value[integer]
sample.channel_number[integer0-15] .sampling_period [unsigned integer].pipe_name[string].
pro.name[string].parameter1.parameter2.parameter3…
timer.period[unsigned int] .name. parameter1. parameter2. parameter3…
İzmir Institute of Technology Embedded Systems Lab
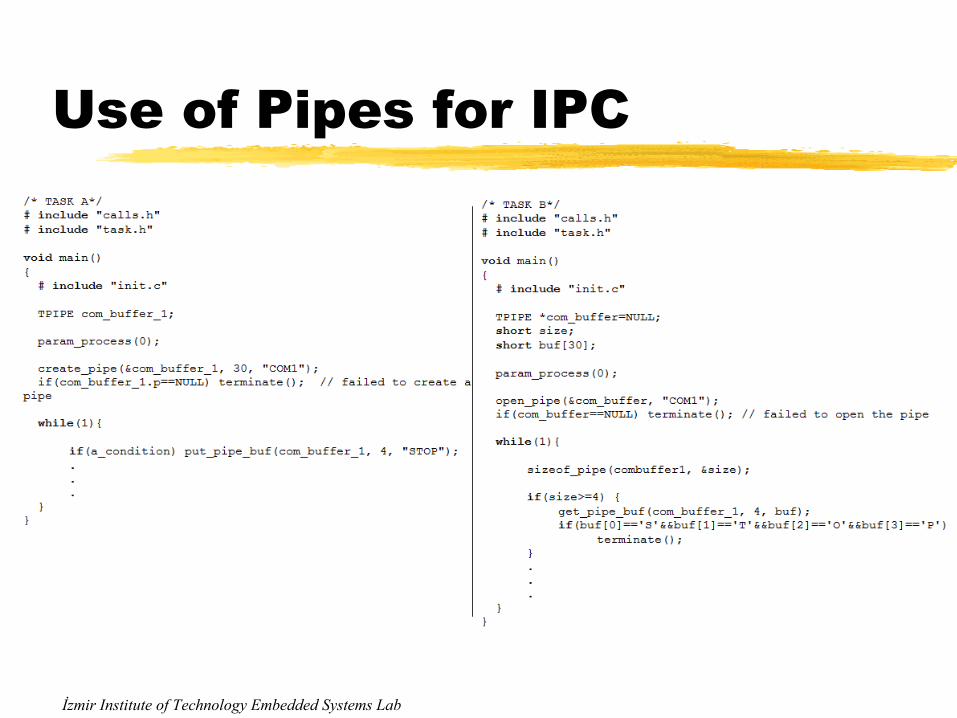
Use of Pipes for IPC
İzmir Institute of Technology Embedded Systems Lab
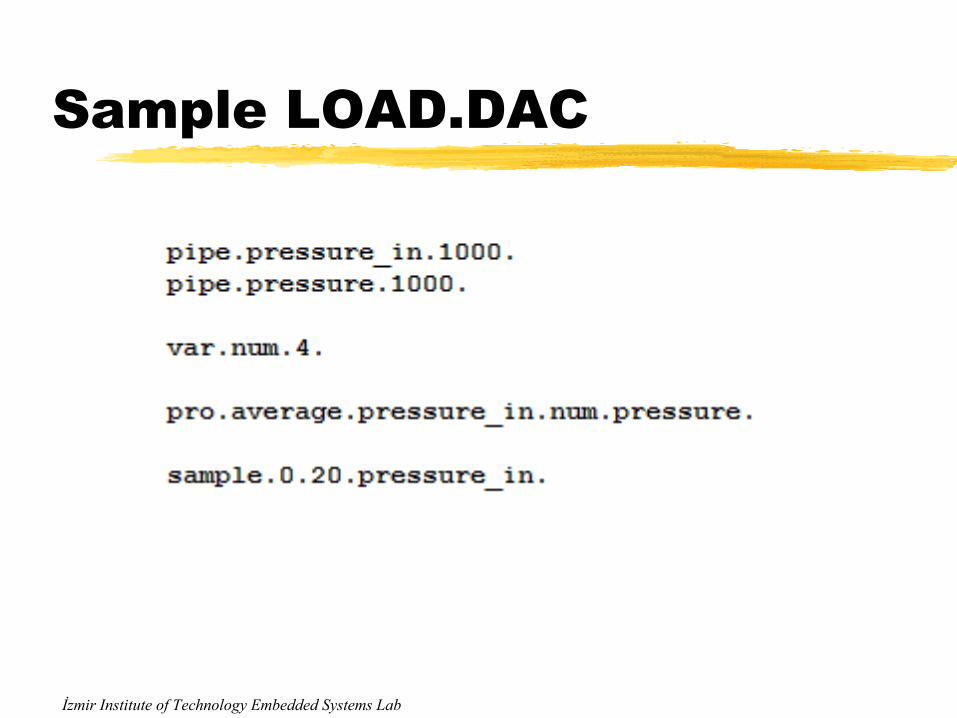
Sample LOAD.DAC
İzmir Institute of Technology Embedded Systems Lab
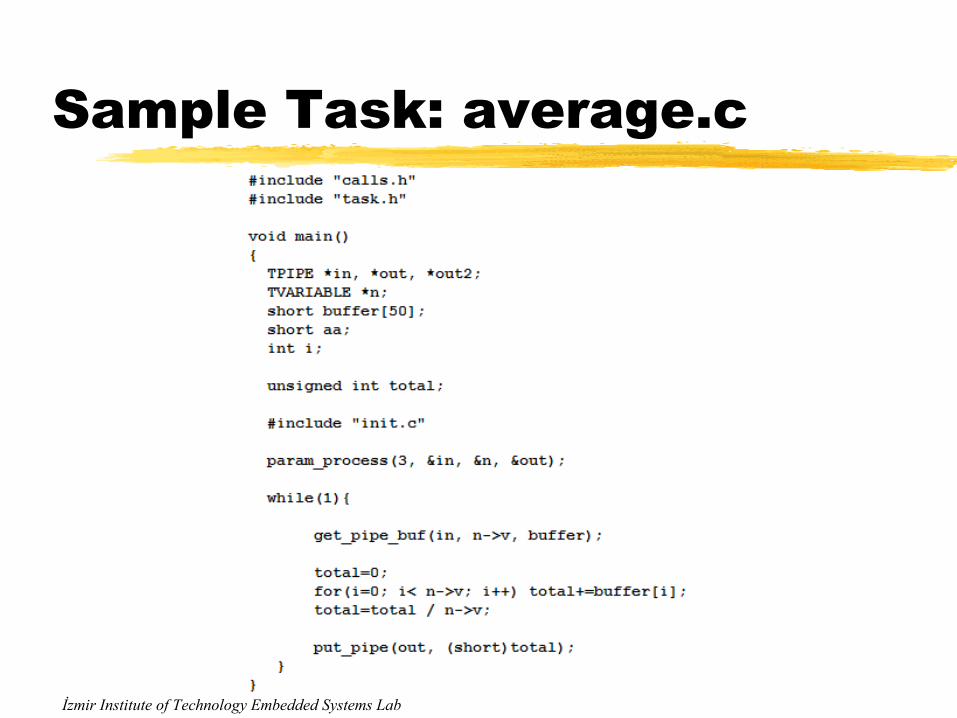
Sample Task: average.c
İzmir Institute of Technology Embedded Systems Lab





























