Embed Size (px)
Citation preview

1
Real-time Post-processing Method to Enhance
Multiple-point Statistics Simulation
Satomi Suzuki1 and Sebastien Strebelle2 1Department of Energy Resources Engineering, Stanford University 2Chevron Energy Technology Company
Abstract
Multiple-point statistics (MPS) simulation has gained increasing application to reservoir
modeling as an effective facies modeling tool, providing a way to simulate complex geological
features while honoring well and seismic data. The geological patterns to be simulated are provided
in the form of a training image. That training image should be large enough to display multiple
replicates of the desired geological patterns; otherwise, the simulation may fail to reproduce the
multiple-point statistics moments associated to those patterns, and anomalies may appear in the
simulated realizations (e.g. disconnection of sand channels). However, on the other side, the use of
large training images can make the simulation extremely computational time demanding.
This paper proposes a new method to improve the modeling accuracy of MPS simulation. That
method has been designed in the context of the multiple-grid sequential simulation approach
implemented in the MPS program snesim. The idea is that, if at any given node visited along the
simulation random path, no replicate of the local conditioning data event can be found in the training
image, then the nodes previously simulated are re-visited in order to maximize the conditioning of
both those previously simulated nodes and the currently visited node. That post-processing is applied
only during the first stage of the multiple-grid simulation approach, reducing computational cost, yet
improving pattern reproduction accuracy.
1. Introduction
For the last few years, multiple-point statistics (MPS) simulation (Guardiano and Srivastava, 1993;
Strebelle, 2002) has become one of the most favored facies modeling techniques in geostatistics
because of its ability to reproduce complex geological patterns (e.g. sinuous channels) that cannot be
modeled by two-point statistics moments (i.e. variograms). MPS simulation uses a “training image” to
describe the depositional facies patterns to be reproduced in the reservoir model conditional to well

2
data. The training image provides information about facies heterogeneity, i.e. facies geometries and
interactions among facies. Figure 1 gives an example of training image illustrating a fluvial channel
system. The training image is a purely conceptual geological model; it does not need to be constrained
to any specific reservoir data.
Unlike variogram-based simulation techniques such as Sequential Indicator Simulation, local
conditional probabilities in MPS simulation are directly borrowed from the training image without any
analytical formulation such as kriging. Because of the richness of the training image, the conditional
probabilities in MPS simulation are not limited anymore to two-point statistics, but they are estimated
from n-point statistics moments inferred from the training image, n being the number of available
conditioning data.
Figure 1: Example of training image for a fluvial channel system
One early implementation of MPS simulation, the snesim algorithm (Strebelle, 2002), uses a
pixel-based sequential simulation approach, which makes the conditioning to well and seismic data
much easier than in object-based modeling techniques (Viseur, 1999). The depositional facies are
simulated on a Cartesian grid by visiting the grid nodes one at a time along a random path. Sampled
grid nodes, i.e. nodes where depositional facies can be observed or interpreted from well data, are not
visited, but they are used as conditioning hard data for the simulation of the unsampled nodes. At each
unsampled grid node, the snesim algorithm consists of 1) looking for conditioning data in a local
neighborhood and retrieving from the training image all the facies patterns that match the data event
formed by those conditioning data, 2) computing the conditional probability of facies occurrence from
the central values of the retrieved training replicates, and 3) drawing a facies from the computed
probability.
The conditioning data include both hard data and previously simulated facies. The conditional
probability of occurrence of facies k at grid node ui is computed as:
Training ImageTraining Image

3
{ }{ }
{ }i
ii
ii
k
k
uuu
uu
atevent datacond.patternfacies#atevent datacond.patternfaciesatfacies#
ofodneighborhoindatacond.|atfaciesProb
≡≡∩=
=
= (1)
The set of training facies patterns that match the conditioning data event is denoted as {facies pattern
� cond. data event at ui}. In the actual implementation of the snesim algorithm, the training facies
patterns are stored before the simulation starts in a dynamic data structure called “search tree”, which
requires scanning the training image only once. Then during the simulation, the conditional
probabilities of type (1) are retrieved from the search tree in a very efficient way; they do not require
scanning the training image repeatedly (see Strebelle for details).
The MPS simulation can honor any order of multiple-point statistics in theory. However, in
practice, because of the limited size of the training image, hence the limited variation of patterns
provided by the training image, only a small amount of multiple-point statistics moments can be
actually inferred from the training image. Thus computing conditional facies probabilities from the
training image very often requires dropping conditioning data until at least one training facies pattern
matching the conditioning data event can be found. Strebelle and Remy (2004) have shown that the
more dropped conditioning data, the more anomalies (e.g. channel disconnections) are generated in
the simulated realization, see Figure 2.
Figure 2: (left) Facies model simulated by the snesim algorithm (250*250) using the training image
(250*250) depicted in Figure 1. (right) The grid nodes where conditioning data are dropped during the
MPS simulation. The circles associated by the arrows highlight the strong correlation between poor
conditioning and anomalies. (Courtesy of Strebelle and Remy)
This paper proposes a new method to enhance the pattern reproduction accuracy of MPS
simulation, reducing the number of anomalies by improving the data conditioning during the
simulation.
MPS modelMPS modelLocations of dropped
conditioning dataLocations of dropped
conditioning dataMPS modelMPS modelLocations of dropped
conditioning dataLocations of dropped
conditioning data

4
2. Method
2.1 Multi-grid Simulation and Unilateral Model
Our method is designed in the context of the multiple-grid approach implemented in snesim. That
approach consists of simulating nested increasingly finer-scale grids, as illustrated in Figure 3 (Tran,
1994; Strebelle, 2002). Nodes simulated in coarser-scale grids are used as conditioning data to
simulate nodes in finer-scale grids.
Figure 3: Example of multi-grid simulation. The facies model (250 * 250) is simulated using the
training image (250 * 250) in Figure 1. Anomalies are highlighted by circles.
As highlighted in Figure 3, anomalies (channel disconnections) can be observed as soon as in the
coarsest-scale grid (stage 1). They are then carried over finer-scale grids (stages 2, 3, and 4). This
example suggests that the key step of the multiple-grid simulation approach is the first stage: if facies
patterns are successfully reproduced without anomalies at the coarsest-scale grid stage, the final
simulated realization is expected to achieve satisfactory pattern reproduction.
The primary reason for the generation of anomalies is attributed to the failure of the Markov
Random Field (MRF) property (Daly, 2004; Holden, 2006):
( ) ( )iikiik ProbProb uuuu of odneighborho| except nodes all| = (2)
Daly (2004) showed that Eq. 2 does not hold if a random path is used for the sequential simulation,
resulting in the inaccurate reproduction of input statistics. Yet, property (2) is a critical hypothesis of
sequential simulation algorithms, which rely on the decomposition of a joint probability into a series
of conditional probabilities:
Stage 1 (8x8) Stage 2 (4x4) Stage 3 (2x2) Stage 4 (1x1)Stage 1 (8x8) Stage 2 (4x4) Stage 3 (2x2) Stage 4 (1x1)

5
)(Pr)|(Pr),,,|(Pr),,,|(Pr
),,,(Pr),,,|(Pr),,,|(Pr
),,,(Pr),,,|(Pr),,,(Pr
1122211121
2212211121
12112121
AobAAobAAAAobAAAAob
AAAobAAAAobAAAAob
AAAobAAAAobAAAob
NNNN
NNNNN
NNNN
∗∗=
∗∗=∗=
−−−
−−−−
−−
���
�
���
���
(3)
where Aj, j = 1, …, N, denote dependent events (e.g. facies occurrences at grid nodes) that the modeler
wants to simulate by conditioning them jointly to some input statistics (e.g. statistics inferred from a
given training image). In MPS simulation, the series of conditional probabilities of Eq. (3) are inferred
from the training image.
If a restricted conditioning data search neighborhood is used to infer the conditional probabilities of
Eq. (3), as it is the case in snesim, then failure in Eq. (2) directly results in failure of Eq. (3), meaning
that the final realization may not be, in the rigorous sense, a sample of the joint probability Prob(A1,
A2, ….., AN), i.e. it may not honored all input statistics.
One solution to avoid this problem is the unilateral model or Markov Mesh model (Pickard, 1980;
Daly, 2004). The unilateral model consists of using a raster scan path that proceeds along one of the
axes of the model grid instead of a random path (Figure 4). As shown in Figure 4, the facies at
location ui is simulated conditionally to the closest previously simulated facies, which are all located
behind the current position ui.
Figure 4: Raster scan path and conditioning neighborhood of the unilateral model
In theory, Eq. 2 holds for the unilateral model only if the size of the simulation grid is infinite; in
practice, the reproduction of input statistics is limited by grid boundary effects (Daly, 2004). Grid
boundary effects are attributed to the simple fact that previously simulated facies data do not exist
outside the simulation grid. Thus the number of data that can be used for simulating grid boundary
nodes is necessarily smaller than for non-boundary nodes, resulting in the reproduction of smaller
order input statistics that may conflict with higher order input statistics.
����������������������
� ����� ���
� �������������
����������
����������������������
� ����� ���
� �������������
���������� ����������

6
Other practical limitations of the implementation of a unilateral model in MPS simulation would
be the following:
1) The unilateral model should be used only at the first stage of the multiple-grid simulation
approach.
2) The unilateral model should not allow conditioning the simulation to well data.
Indeed, to ensure the Markov Random Field (MRF) property (Eq. 2) in the unilateral model, the
simulation of any node ui should be conditioned only to nodes located behind ui, which excludes well
data and previously simulated facies carried from previous stages of the multiple grid simulation
approach, located ahead of ui.
However, remember that, as illustrated in Figure 3, the critical time of MPS simulation in terms of
pattern reproduction is the first stage of the multiple-grid simulation approach. The later stages can
use a random path without losing much of the pattern reproduction accuracy achieved at the first
stage. Another favorable property of the unilateral model is the structured simulation path. As
described in Figure 4, in the unilateral model, the facies simulated at location ui-1 is only used for
simulating facies at ui. Similarly, the facies simulated at location ui-2 is only used for simulating facies
at ui-1 and ui, etc. Thus if the facies simulation at location ui fails due to the poor conditioning, one
could change the facies previously simulated at ui-1 (or the combination of facies at ui-2 and ui-1) such
that the conditioning at location ui is improved. In other words, whenever the facies simulation at a
particular node fails, the few previously simulated facies used for conditioning the simulation of that
node can be “repaired” by simply walking back the raster path, without affecting the rest of the
simulation.
2.2 Real-time Post-processing Method (RTPP)
Our method for improving the MPS simulation is based on the use of the unilateral model in the
first stage of the multiple-grid simulation process. The idea is to detect any failure of conditioning
during the simulation, and as soon as a failure is detected at a particular location (i.e. as soon as
conditioning data need to be dropped), to walk back the raster path and “repair” previously simulated
facies so that the number of data conditioning the node currently visited is maximized. Figure 5
illustrates the schematic steps of the method:

7
Figure 5: Schematic steps of real-time post-processing method. Blue figures attached to facies
categories indicate the number of data actually used for conditioning if the facies category is placed on the
grid
Step 1: Suppose that the conditioning failed at location 0.
Step 2: Step back the raster path, and select the best combination of facies for locations 0 and 1
that maximizes the number of conditioning data that would be actually used (i.e. not
dropped) to simulate these two locations. Figure 5 indicates the number of conditioning
data used for each possible combination of facies at locations 0 and 1. In this example,
sand at location 1 and sand at location 0 is the optimal combination (22 conditioning data
used in total: 10 for location 1 and 12 for location 0), thus the facies at location 1 will be
changed from mud to sand.
Step 3: Step back the path once again, and select the best combination of facies for locations 0, 1
and 2, again in terms of total number of conditioning data used. In this example, sand at
location 2, sand at location 1 and sand at location 0 is the optimal combination (36
conditioning data used in total: 12 for location 2, 12 for location 1 and 12 for location 0),
thus the facies at location 2 will be changed from mud to sand.
Step 4: Continue stepping back the path until changing the previously simulated facies does not
improve the total number of conditioning data anymore. Then, place the selected best
combination of facies on the model grid, and continue the simulation.
�
�
�
�
Step 1
�
�
�
�
�
�
��
��
���
Step 2
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
Step 3
���
Step 4
� ����� ���
� �������������
�
�
�
�
Step 1
�
�
�
�
�
�
��
��
���
Step 2
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
Step 3
���
Step 4
�
�
�
�
Step 1
�
�
�
�
�
�
��
��
���
Step 2
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
�
�
�
�
�
�
��
��
���
�
�
�
���
��
���
��
��
Step 3
���
Step 4
� ����� ���
� �������������

8
In the actual implementation, the optimal combination of facies is evaluated based on the
“conditioning rate”, which is defined as the number of conditioning data used divided by the total
number of data in the neighborhood, in order to account for grid boundary effects.
The Real-time Post-processing (RTPP) technique can be used for conditioning the unilateral
model to well data. When the raster path arrives at a well location, the simulation walks back the
raster path and find the best combination of facies that not only honors the well data, but also
maximizes the local data conditioning. The conditioning neighborhood is expanded as depicted in
Figure 6 in case of the conditioning to well data. This neighborhood expansion results in the failure of
Markov Random Field (MRF) property (Eq. 2). However, the resulting inaccuracy of pattern
reproduction can be reduced by using the Real-time Post-processing (RTPP) method.
Figure 6: Neighborhood expansion for conditioning to well data
2.2 RTPP Combined with Re-simulation Method (RTPP+RS)
The proposed method (RTPP) is combined with the re-simulation (RS) method proposed by
Strebelle and Remy (2004) for further improvement. Strebelle and Remy identify the nodes simulated
with a very limited conditioning at the end of each stage of the multi-grid approach, and re-simulate
them. That process is repeated several times, until the number of the nodes that need to be re-
simulated stops decreasing. This method is coupled with the Real-time Post-processing (RTPP)
method, with some minor modifications, as shown in Figure 7.
�
����������������������
� ����� ���
� ��������������������
�
����������������������
� ����� ���
� ��������������������
Figure 7: Flowchart of Real-time Post-processing
(RTPP) method combined with the re-
simulation (RS) method. MPS denotes the
regular MPS simulation by the snesim
algorithm. The ‘bad points’ denote the grid
nodes where the number of nearest facies
events honoring the training image is less
than a given criteria.
����
�����
�����
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
%�(
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
������� ��&� ��!�����'
%�( ������
����
�����
�����
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
%�(
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
������� ��&� ��!�����'
%�( ������
����
�����
�����
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
%�(
��� ������� �������� �����!���������� ���� �"��#��$��
% ���&� ��!�����'
������� ��&� ��!�����'
%�( ������

9
As illustrated, the RTPP method is applied only to the first stage of the multiple-grid simulation
approach, the RS method to the second stage, and then regular MPS simulation is performed at the
later stages. At the end of the first stage, the simulated realization is scanned by a template as depicted
in Figure 8a to evaluate at each grid node the maximum number of data forming an event for which at
least one replicate can be found in the training image. The greater that maximum number of data, the
more accurate the reproduction of input (training) statistics is at the grid node. That evaluation is
performed with an almost negligible CPU cost using search trees in snesim (Strebelle, 2002).
If the maximum number of data is less than a given criteria, the corresponding grid node is marked as
a “bad node”. The same process is applied again to mark “bad nodes” at the end of the second stage of
the multiple-grid simulation approach. All the “bad nodes” are re-simulated at the end of that stage,
starting with the least bad nodes (in terms of reproduction accuracy of input statistics). That re-
simulation process is repeated several times, until the number of “bad points” stops decreasing (Figure
8b). Then, the simulation can proceed to the third stage.
Figure 8: (a) Scan of a realization by a template window, (b) Behavior of the number of “bad points”
during the repetitive re-simulation
3. Application Examples
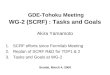
The combined RTPP+RS technique is tested on the modeling of 2D and 3D channels. Figure 9
shows simulated channel realizations (2D) generated respectively by the original MPS simulation
technique, the unilateral model (unconditional simulation), and the proposed methods (RTPP and
RTPP+RS). Hereafter, “conditional simulation” and “unconditional simulation” respectively denote
the simulation with and without conditioning to well data. The same training image, displayed in
Figure 1, is used for all simulations. The well data (marked as dots on the realizations from
0
50
100
150
200
0 10 20 30 40
Iteration count
# of
bad
poi
nts
(a) (b)
0
50
100
150
200
0 10 20 30 40
Iteration count
# of
bad
poi
nts
(a) (b)

10
conditional simulation) are synthetic; they were generated so that they conflict with the training
image.
Figure 9: Simulated channel realizations, 2D case, (a) conditional and (b) unconditional simulations
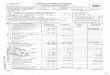
Figure 10: Comparison of (a) number of realizations without anomalies out of 100 simulations and (b) average CPU time per simulation, 2D case
Training Image (250 x 250)
MPS Unilateral Model RTPP RTPP+RS
(a) Unconditional Simulation (250x250)
Well data (32 wells)
(b) Conditional Simulation (250x250)
MPS RTPP RTPP+RS
Training Image (250 x 250)
MPS Unilateral Model RTPP RTPP+RS
(a) Unconditional Simulation (250x250)
Well data (32 wells)
(b) Conditional Simulation (250x250)
MPS RTPP RTPP+RS
Proposed methods
Unconditional Simulation
2
23
6675
0
10
20
30
40
50
60
70
80
90
100
MPS
Unilateral
RTPP
RTPP+RS
Conditional Simulation
1
44
57
0
10
20
30
40
50
60
70
80
90
100
MPS
RTPP
RTPP+RS
(a) # of Realizations w/o Anomalies (out of 100)
Conditional Simulation
15.9 17.2 18.0
0
5
10
15
20
25
30
35
40
45
50
Use
r C
PU
tim
e (s
ec.)
MPS
RTPP
RTPP+RS
Unconditional Simulation
16.3 16.2 16.2
0
5
10
15
20
25
30
35
40
45
50
Use
r C
PU
tim
e (s
ec.)
MPS
RTPP
RTPP+RS
(b) Average CPU time (per realization)
Proposed methods
Proposed methods Proposed methods
MPS Uni-lateral
RTPP RTPP+RS
RTPP+RS
RTPP RTPP+RS
MPSMPS RTPP RTPP+RS
MPS RTPP
Proposed methods
Unconditional Simulation
2
23
6675
0
10
20
30
40
50
60
70
80
90
100
MPS
Unilateral
RTPP
RTPP+RS
Conditional Simulation
1
44
57
0
10
20
30
40
50
60
70
80
90
100
MPS
RTPP
RTPP+RS
(a) # of Realizations w/o Anomalies (out of 100)
Conditional Simulation
15.9 17.2 18.0
0
5
10
15
20
25
30
35
40
45
50
Use
r C
PU
tim
e (s
ec.)
MPS
RTPP
RTPP+RS
Unconditional Simulation
16.3 16.2 16.2
0
5
10
15
20
25
30
35
40
45
50
Use
r C
PU
tim
e (s
ec.)
MPS
RTPP
RTPP+RS
(b) Average CPU time (per realization)
Proposed methods
Proposed methods Proposed methods
MPS Uni-lateral
RTPP RTPP+RS
RTPP+RS
RTPP RTPP+RS
MPSMPS RTPP RTPP+RS
MPS RTPP

11
Figure 10 compares a) the number of realizations without anomalies obtained out of 100
simulations and b) the average CPU time per simulated realization, for the different techniques. The
RTPP or RTPP+RS methods help decrease significantly the number of anomalies. Enhanced MPS
modeling accuracy is achieved without CPU time increase despite the additional simulations required
by the RTPP and RS methods. Indeed, when using RTPP or RTPP+RS, geological patterns are better
reproduced at the early stages of the multiple-grid approach, thus less conditional data need to be
dropped at the later stages, saving considerable CPU time. In other words, the cost of optimization/re-
simulation at early stages is compensated by the reduction of CPU cost at later stages.
Figure 11: 3D Channel simulated realizations: (a) conditional and (b) unconditional. The connected channels are labeled by the same color. Note that MPS tends to simulate overly-connected channels.
(a) Unconditional Simulation (80x80x20)
RTPPMPS RTPP+RS
Training Image (80x80x20)
(b) Conditional Simulation (80x80x20)
RTPPMPS RTPP+RS
Volume of connected sand (TI)
Well Data (5 wells)
Vol. of connected sand Vol. of connected sand Vol. of connected sand
Vol. of connected sand Vol. of connected sand Vol. of connected sand
(a) Unconditional Simulation (80x80x20)
RTPPMPS RTPP+RS
Training Image (80x80x20)
(b) Conditional Simulation (80x80x20)
RTPPMPS RTPP+RS
Volume of connected sand (TI)
Well Data (5 wells)
Vol. of connected sand Vol. of connected sand Vol. of connected sand
Vol. of connected sand Vol. of connected sand Vol. of connected sand

12
Figure 12: Comparison of average CPU time per simulation, 3D case
The results of the 3D case are presented in Figure 11 along with the training image used for the
simulation. Connected channel sands are labeled by the same color. Again the well data used for the
conditional simulation case were generated so that they conflict with the training image, by sampling
data from a model quite different from the training image (Figure 11). The histograms attached to the
realizations and to the training image compare the volume of the connected sand bodies. The regular
MPS simulation is prone to overestimate the connectivity of the channel bodies compared to the
training image, in both the conditional and unconditional cases. In the unconditional case, both the
RTPP method and the RTPP+RS method improve pattern reproduction accuracy. In the conditional
case, the RTPP method does not achieve much improvement compared to regular MPS simulation,
except when combined with the re-simulation method (RTPP+RS). Figure 12 compares the average
CPU time for simulating one realization. Again, both methods allow enhancing modeling accuracy
without increasing CPU time.
4. Acknowledgement
The authors would like to thank Chevron Energy Technology Company for their financial support
for this work and the permission for publication.
5. References
Daly, C. [2004] Higher order models using entropy, Markov Random Fields and sequential
simulations. In Proceedings of the 2004 International Geostatistics Congress
Guardiano, F. and Srivastava, R.M.[1993] Multivariate geostatistics: beyond bivariate moments. in
Soares, A. (ed.) Geostatistics Troia '92: Kluwer Academic Publications 1, 133-144
45.6 43.2 40.8
0102030405060708090
100
MP
S
RTP
P
RTP
P+E
SR
S
Use
r C
PU
tim
e (m
in.) MPS
RTPP
RTPP+ESRS
42.4 42.6 43.2
0102030405060708090
100
MP
S
RTP
P
RTP
P+E
SR
S
Use
r C
PU
tim
e (m
in.) MPS
RTPP
RTPP+ESRS
������������ ��������� ���������� ���������
RTPP+RS RTPP+RS�������������
�������������
RT
PP
+RS
RTP
P+R
S
45.6 43.2 40.8
0102030405060708090
100
MP
S
RTP
P
RTP
P+E
SR
S
Use
r C
PU
tim
e (m
in.) MPS
RTPP
RTPP+ESRS
42.4 42.6 43.2
0102030405060708090
100
MP
S
RTP
P
RTP
P+E
SR
S
Use
r C
PU
tim
e (m
in.) MPS
RTPP
RTPP+ESRS
������������ ��������� ���������� ���������
RTPP+RS RTPP+RS�������������
�������������
RT
PP
+RS
RTP
P+R
S

13
Holden, L. [2006] Markov Random Fields and multipoint statistics. In Proceedings of 10th European
Conference on the Mathematics of Oil Recovery
Strebelle, S. [2002] Conditional simulation of complex geological structures using multiple-point
geostatistics. Math. Geol.. 34, 1-22.
Strebelle, S., and Remy, N. [2004] Post-processing of multiple-point geostatistical models to improve
reproduction of training patterns. in Proceedings of the 2004 International Geostatistics Congress
Pickard, D.K. [1980] Unilateral markov fields. Adv. Appl. Probab. 12, 655-671
Tran, T. [1994] Improving Variogram Reproduction on Dense Simulation Grids. Computers and
Geosciences 20 (7), 1161-1168
Viseur, S. [1999] Stochastic Boolean Simulation of Fluvial Deposits: a New Approach Combining
Accuracy and Efficiency. SPE Annual Technical Conference and Exhibition, SPE 56688