-
8/8/2019 Real Time Embedded Systems-Introduction
1/23
REAL TIME EMBEDDED SYSTEMS
-
8/8/2019 Real Time Embedded Systems-Introduction
2/23
Introduction
Real Time Systems:
A system is a mapping of a set of inputs into a set
of outputs.
-
8/8/2019 Real Time Embedded Systems-Introduction
3/23
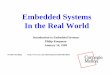
Typical real-time control
system including inputs from
sensors and imaging devicesand producing control signals
and display information
A classic representation of a
real-time system as a
sequence of jobs to be
scheduled.
-
8/8/2019 Real Time Embedded Systems-Introduction
4/23
Response Time : The time between the
presentation of a set of inputs to a system
(stimulus) and the realization of the required
behavior (response), including the availability
of all associated outputs, is called the
response time of the system. Real-time System: A system that
must satisfy
explicit (bounded) response-time constraints
or risk severe consequences, including failure. Failure : a
system that cannot satisfy one or
more of the requirements stipulated in the
formal system specification.
-
8/8/2019 Real Time Embedded Systems-Introduction
5/23
Or
A real-time system is one whose logical
correctness is based on both the correctness ofthe outputs and
their timeliness.
Real-time systems are often reactive orembedded systems.
Reactive systems are those in which scheduling isdriven by
ongoing interaction with theirenvironment;
When Is a System Real-Time? it must respond within a certain
time or there
could be an academic or financial disaster.
-
8/8/2019 Real Time Embedded Systems-Introduction
6/23
Soft Real Time: A soft real-time system is one inwhich
performance is degraded but not
destroyed by failure to meet response-timeconstraints.
Hard Real-time Systems : A hard real-time systemis one in which
failure to meet a single deadline
may lead to complete and catastrophic systemfailure.
A firm real-time system :is one in which a fewmissed deadlines
will not lead to total failure, but
missing more than a few may lead to completeand catastrophic
system failure.
-
8/8/2019 Real Time Embedded Systems-Introduction
7/23
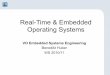
Events and Determinism:
A change in state results in a change in theflow-of-control of
the computer program.
The decision block represented by the
diamond suggests that the stream of program
instructions, can take one of two paths,
depending on the response in question.
If-then, goto, and case statements in any
language represent a possible change in
flow-of-control.
-
8/8/2019 Real Time Embedded Systems-Introduction
8/23
A simple program flowchart showing a branch as a change in
flow-of-control, represented by the diamond icon.
-
8/8/2019 Real Time Embedded Systems-Introduction
9/23
Any occurrence that causes the program
counter to change non-sequentially is
considered a change of flow-of-control, andthus an event.
In scheduling theory, the release time of a
job is similar to an event. The release time is the time at
which an
instance of a scheduled task is ready to run,
and is generally associated with an interrupt. Events are
slightly different from jobs in that
events can be caused by interrupts as well as
conditional and unconditional branches.
-
8/8/2019 Real Time Embedded Systems-Introduction
10/23
Synchronous and Asynchronous Events:
Synchronous events are those that occur at
predictable times in the flow-of-control, such asthat
represented by the decision box in theflowchart.
The change in flow-of-control, represented by a
conditional branch instruction, or by theoccurrence of an
internal trap interrupt,
can be anticipated.
Asynchronous events occur at unpredictable
points in the flow-of-control and are usuallycaused by external
sources.
Events that do not occur at regular intervals (orperiods) are
called aperiodic or sporadic.
-
8/8/2019 Real Time Embedded Systems-Introduction
11/23
A periodic but synchronous event is onerepresented by a sequence
of invocation of tasks
in a repeated, circular fashion, otherwise knownas cyclic
code.
A branch instruction that happens infrequently,say, on the
detection of some exceptional
condition, is both sporadic and synchronous.
Interrupts that are generated irregularly
(randomly) by an external device are classified aseither
asynchronous aperiodic or sporadic,depending on whether the
interrupt is generatedfrequently or not with respect to the
systemclock.
-
8/8/2019 Real Time Embedded Systems-Introduction
12/23
Determinism:
Software control of any real-time system and
associated hardware is maintained when the nextstate of the
system, given the current state and aset of inputs, is
predictable.
In other words, the goal is to anticipate how a
system will behave in all possible circumstances. Or:
A system is deterministic if, for each possible
state and each set of inputs, a unique set of
outputs and next state of the system can
be determined.
-
8/8/2019 Real Time Embedded Systems-Introduction
13/23
if in a deterministic system the response time
for each set of outputs is known, then, the
system also exhibits temporal determinism.
A side benefit of designing deterministic
systems is that guarantees can be given that
the system will be able to respond at anytime, and in the case
oftemporally
deterministic systems, when they will
respond. This reinforces the association ofcontrol with
real-time systems.
-
8/8/2019 Real Time Embedded Systems-Introduction
14/23
CPUUtilization:
The (CPU) utilization or time-loading factor, U, isa measure of
the percentage of non-idleprocessing.
A system is said to be time-overloaded if
U>100%.
Systems that are too highly utilized areundesirable because
changes or additions cannotbe made to the system without risk of
time-overloading.
Systems that are not sufficiently utilized are notnecessarily
good, because this implies that thesystem was over-engineered and
that costs canbe reduced with less expensive hardware.
-
8/8/2019 Real Time Embedded Systems-Introduction
15/23
Suppose a system has n 1 periodic tasks, each
with an execution period ofpi, and hence,
execution frequency, fi= 1/pi
If task i is known to have (or has been estimated
to have) a maximum (worst case) execution time
ofei, then the utilization factor, ui, for task eiis:ui= ei/pi
(1.1)
Then the overall system utilization is
(1.2)in
i
i
n
i
i peuU /11
!!
!!
-
8/8/2019 Real Time Embedded Systems-Introduction
16/23
The deadline for the periodic task i, di is thenext cycle or the
time period, which is a
critical design factor constrained by ei , whichis difficult to
determine in many cases.
For aperiodic and sporidic tasks ui is calculated
by assuming some worst case delay betweenthe event occurrences,
which can inflate theutilization factor.
The utilization factor is the number of micro
instructions per second that can be processedbased on some
predetermined instructionmix.
-
8/8/2019 Real Time Embedded Systems-Introduction
17/23
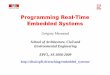
Real Time System Design Issues
Real time systems are strongly influenced bycontrol theory,
software engineering andoperations research.
The figure shows some of the disciplines ofcomputer science and
electrical engineering thataffect the design and analysis of real
timesystems, which makes it a highly specialized area.
The design and implementation of real timesystems requires
attention to the numerousproblems:
-
8/8/2019 Real Time Embedded Systems-Introduction
18/23
-
8/8/2019 Real Time Embedded Systems-Introduction
19/23
The selection of hardware and software andevaluation of the
trade-off needed for cost
effective solution including dealing withdistributed computing
systems and issues ofparallelism and synchronization.
Specification and design of real time systemsand correct
representation of the temporalbehavior.
Understanding the nuances of the
programming language(s) and the real-timeimplications resulting
from their translationinto machine code.
-
8/8/2019 Real Time Embedded Systems-Introduction
20/23
Maximizing of system fault tolerance and
reliability through careful design.
The design and administration of tests, and the
selection of test and development equipment.
Taking advantage of open systems technology
and interoperability with open system standards,such as the
CORBA real-time standard.
Measuring and predicting response time and
reducing it, performing a schedulability analysis,
for determining and guaranteeing deadline
satisfaction, a priori, of most of scheduling
theory.
-
8/8/2019 Real Time Embedded Systems-Introduction
21/23
Sample systems
-
8/8/2019 Real Time Embedded Systems-Introduction
22/23
The inertial measurement system of an
aircraft:
The software specifications states that the
software to receive x , y and z accelerometer
pulses at a 10 millisecond rate from special
hardware, determining the accelerations in eachdirection and the
roll, pitch and yaw of the
aircraft.
-
8/8/2019 Real Time Embedded Systems-Introduction
23/23
The software will also receive information such astemperature at
a 1-second rate.
The task of the software is to compute actual velocityvector
based on the orientations, accelerometerreadings and various
compensation factors at a 40-millisecond rate.
The system is to output true acceleration, velocity and
position vectors to a pilots display every 40-millisecond rate,
but using a different clock.
These tasks execute at four different rates in theinertial
measurement system and need tocommunicate and synchronize.
The accelerometer readings must be time-relative orcorrelated;
i.e., it is undesirable to mix anxaccelerometerpulse from t with z
and y pulses fromtime t + 1.
These are critical design issues for this system.

























![[Electronics] Real-Time Embedded Systems](https://img.pdfslide.us/doc/110x75/6158f43ab303d120476357ae/electronics-real-time-embedded-systems.jpg)
