Embed Size (px)
Citation preview

“Real” Signal Processing with Wireless Sensor
NetworksGyörgy Orosz, László Sujbert, Gábor Péceli{orosz,sujbert,peceli}@mit.bme.hu
Department of Measurement and Information SystemsBudapest University of Technology and Economics, Hungary
Regional Conference on Embedded and Ambient Systems–RCEAS 2007Budapest, Hungary, Nov. 22-24, 2007

Wireless signal processing „Real” signal processing
Fast changing signals Hard real-time operation
Advantages of Wireless Sensor Networks (WSNs) Easy to install Flexible arrangement
Difficulties of utilization of WSN: Data loss Limit of the network bandwidth Lots of autonomous systems
Sensor network from signal processing aspects Topics
Signal sensing Synchronization Distributed signal processing

ANC: a case study
mote1
moteG
DSP board
reference signalgateway
mote
codec DSP
mote2
moteN
Plant to be controlled: acoustic system
Noise sensing:
Berkeley micaz motes
Actuators: active loudspeakers
Gateway: network DSP Signal processing:
DSP board ADSP-21364 32 bit floating point 330 MHz 8 analog output channels
Motes TinyOS ATmega128 Sensor boards
Identification
microphone

Physical arrangement
sensor mote
DSP board
gateway mote
active loudspeaker

Sampling precision 1.
Sampling with low priorityShared timer
50 100 150 200 250-40
-30
-20
-10
0
10
20
30
frequency [Hz]
ampl
itude
[dB
]
50 100 150 200 250-40
-30
-20
-10
0
10
20
30
frequency [Hz]am
plitu
de [
dB]
Sampling with high priorityDedicated timer
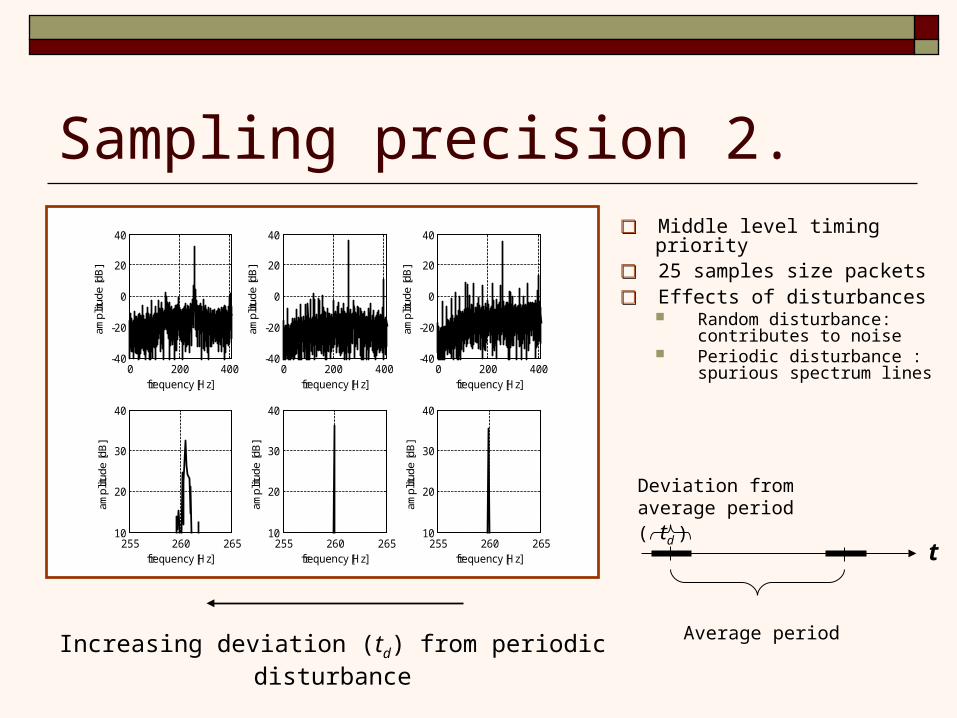
Sampling precision 2. □□ Middle level timing priority □□ 25 samples size packets □□ Effects of disturbances
Random disturbance: contributes to noise
Periodic disturbance : spurious spectrum lines 0 200 400
-40
-20
0
20
40
frequency [Hz]
ampl
itude
[dB
]
0 200 400-40
-20
0
20
40
frequency [Hz]
ampl
itude
[dB
]
0 200 400-40
-20
0
20
40
frequency [Hz]
ampl
itude
[dB
]
255 260 26510
20
30
40
frequency [Hz]
ampl
itude
[dB
]
255 260 26510
20
30
40
frequency [Hz]
ampl
itude
[dB
]
255 260 26510
20
30
40
frequency [Hz]
ampl
itude
[dB
]
Increasing deviation (td) from periodic disturbance
t
Average period
Deviation from average period ( td )
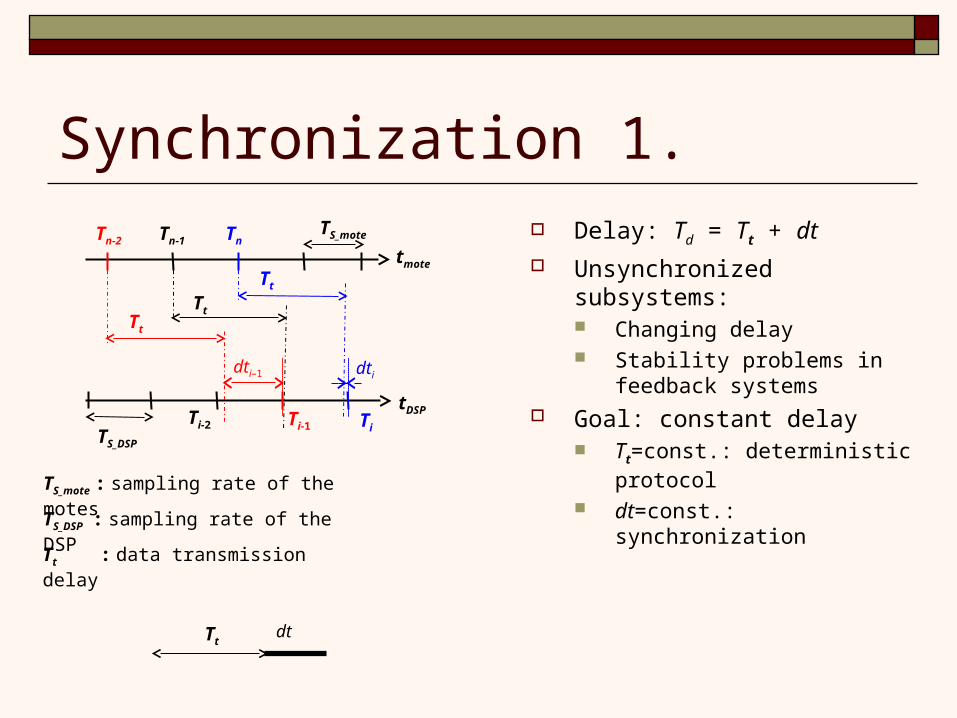
Synchronization 1. Delay: Td = Tt + dt Unsynchronized subsystems:
Changing delay Stability problems in
feedback systems Goal: constant delay
Tt=const.: deterministic protocol
dt=const.: synchronization
Ti
Tt
tmote
TS_mote : sampling rate of the motes
Ti-1
Tt
TS_moteTnTn-1Tn-2
Tt
dti–1
TS_DSP
tDSP
TS_DSP : sampling rate of the DSP
Ti-2
dti
Tt : data transmission delay
Tt dt

Synchronization 2. Physical synchronization:
Sampling frequencies are the same Tuning of the timers
Interpolation: Signal value is estimated in signal processing points
Algorithm transformation: algorithm parameters are transformed into Ta (when data arrived).
Synchronization in the ANC system: Motes: physical Motes DSP: linear interpolation
Td1Td2
Tn
tsyst1
Td1=Td2=const
t
d1
d2
TSmote
dt
Ti
d3
f(t)
dtT
dddTf
Smotei
212)(ˆ
tsyst2
Ta: arrival time of data
tmotes
tDSP
Tn
Ti
Physicalsynch.
Interpolation
Interp.Tt
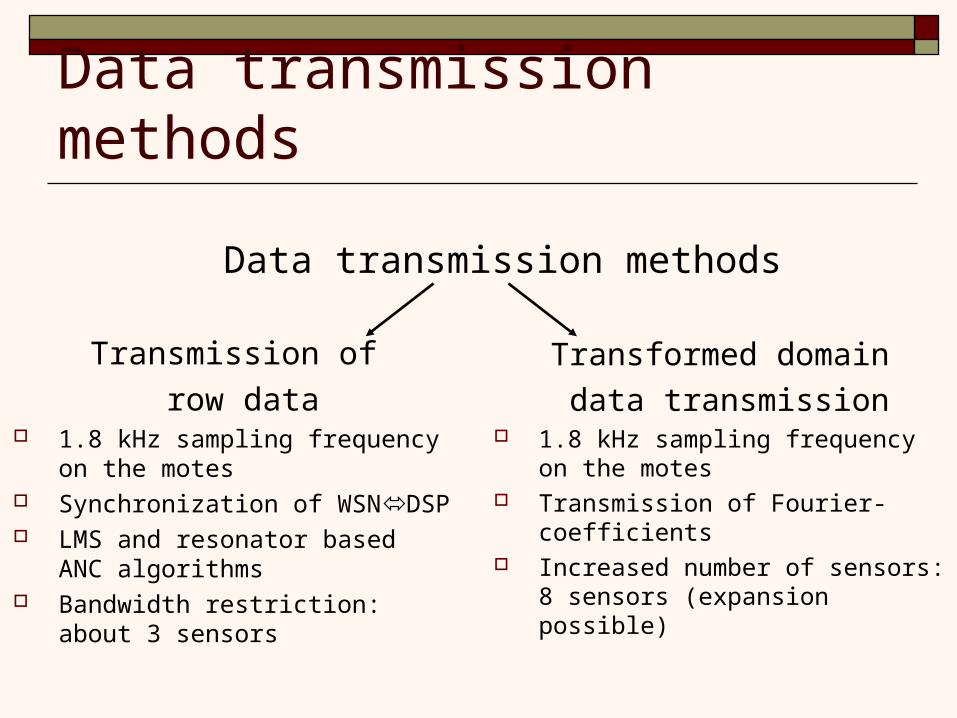
Data transmission methods
Data transmission methods
Transmission of
row data 1.8 kHz sampling frequency on
the motes Synchronization of WSNDSP LMS and resonator based ANC
algorithms Bandwidth restriction:
about 3 sensors
Transformed domain
data transmission 1.8 kHz sampling frequency on
the motes Transmission of Fourier-
coefficients Increased number of sensors:
8 sensors (expansion possible)

Distributed ANC system
Fourier analysis on motes Control algorithm on DSP Synchronization of base functions Computational limits
acoustic plant
control signals
reference signal
ANC algorithm
R(z)
DSP
: synchronization messages: data (Fourier-coefficients) transmission messages
error signals
FA
mote1
FA
moteN
A(z)
gateway
mote2
FA

Summary and future plans Utilization of WSN in closed loop signal
processing systems Importance of signal observation
Sampling Synchronization
Distributed signal processing Searching for possible ways of data
reduction





























