Embed Size (px)
Citation preview
Real Numbers and Computational Complexity
Norbert Müller
FB IV – InformatikUniversität Trier
Norbert Müller (Trier) Darmstadt, 2012-10-05 1 / 34
Introduction
1 Introduction
2 Computational complexity / efficient algorithms
3 Real vs. discrete computational complexity
Norbert Müller (Trier) Darmstadt, 2012-10-05 2 / 34
Introduction
Double precision: “numbers” as basic objects...generalization to R:
I BSS model (Blum/Shub/Smale):F algebraic approachF restricted to basic arithmeticF comparison like “≤” as total functions
I ERA, exact real arithmetic:F approach is algebraic and analyticF starting from basic arithmeticF comparison like “≤” as partial functionsF extendable via (restricted) operator for limits
ERA is already implemented, BSS will remain a theoretical modeluniform cost measure not realisticcomplexity connected to:
I ‘long” integers (Karatsuba, Toom/Cook, Schönhage/Str., Fürer)I multiple precision floating point numbers (Brent)
Norbert Müller (Trier) Darmstadt, 2012-10-05 3 / 34
Introduction
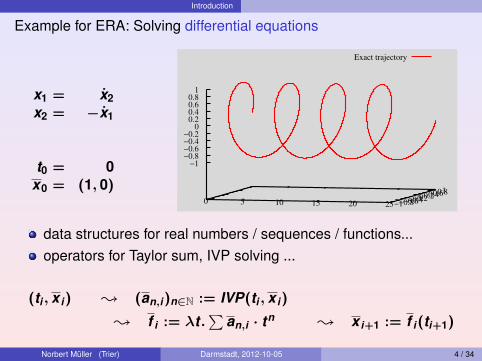
Example for ERA: Solving differential equations
x1 = x2x2 = −x1
t0 = 0x0 = (1, 0)
Exact trajectory
0 5 10 15 20 25−1−0.8−0.6−0.4−0.2 0 0.2 0.4 0.6 0.8 1
−1−0.8−0.6−0.4−0.2
0 0.2 0.4 0.6 0.8
1
data structures for real numbers / sequences / functions...operators for Taylor sum, IVP solving ...
(ti , x i) ; (an,i)n∈N := IVP(ti , x i)
; f i := λt.∑
an,i · tn ; x i+1 := f i(ti+1)
Norbert Müller (Trier) Darmstadt, 2012-10-05 4 / 34
Introduction
(theoretical) computer science↓
computable analysis / complexity on the reals↗ ↖
constructive mathematics numerical mathematics
TTE: Type-2 theory of effectivity(Weihrauch, Brattka, Hertling, Ko,
Rettinger, Ziegler, M., ...)⇔ domains (Blanck, Edalat, Escardo, Tucker, ...)
6⇔ BSS-Modell ‘Real RAM’ (Blum, Shub, Smale,Meer, Gassner ...)
Norbert Müller (Trier) Darmstadt, 2012-10-05 5 / 34
Introduction
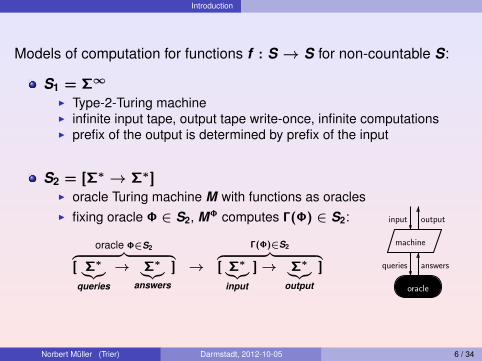
Models of computation for functions f : S → S for non-countable S:
S1 = Σ∞
I Type-2-Turing machineI infinite input tape, output tape write-once, infinite computationsI prefix of the output is determined by prefix of the input
S2 = [Σ∗ → Σ∗]I oracle Turing machine M with functions as oracles
machine
queries answers
input output
oracle
I fixing oracle Φ ∈ S2, MΦ computes Γ(Φ) ∈ S2:
oracle Φ∈S2︷ ︸︸ ︷[ Σ∗︸︷︷︸queries
→ Σ∗︸︷︷︸answers
] →
Γ(Φ)∈S2︷ ︸︸ ︷[ Σ∗︸︷︷︸
input
]→ Σ∗︸︷︷︸output
]
Norbert Müller (Trier) Darmstadt, 2012-10-05 6 / 34
Introduction
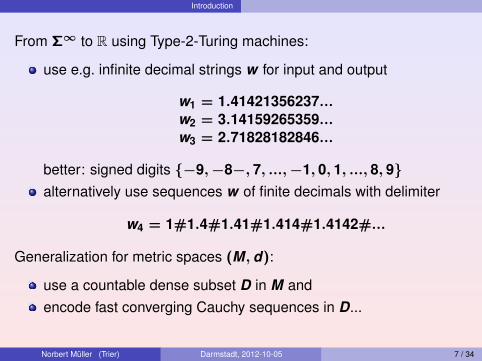
From Σ∞ to R using Type-2-Turing machines:
use e.g. infinite decimal strings w for input and output
w1 = 1.41421356237...w2 = 3.14159265359...w3 = 2.71828182846...
better: signed digits {−9,−8−, 7, ...,−1, 0, 1, ..., 8, 9}alternatively use sequences w of finite decimals with delimiter
w4 = 1#1.4#1.41#1.414#1.4142#...
Generalization for metric spaces (M, d):
use a countable dense subset D in M andencode fast converging Cauchy sequences in D...
Norbert Müller (Trier) Darmstadt, 2012-10-05 7 / 34
Introduction
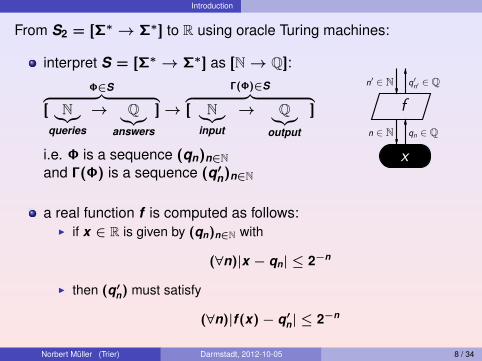
From S2 = [Σ∗ → Σ∗] to R using oracle Turing machines:
interpret S = [Σ∗ → Σ∗] as [N→ Q]:
Φ∈S︷ ︸︸ ︷[ N︸︷︷︸queries
→ Q︸︷︷︸answers
]→Γ(Φ)∈S︷ ︸︸ ︷
[ N︸︷︷︸input
→ Q︸︷︷︸output
]
i.e. Φ is a sequence (qn)n∈Nand Γ(Φ) is a sequence (q′n)n∈N
n′ ∈ N
n ∈ N
q′n′ ∈ Q
qn ∈ Q
f
x
a real function f is computed as follows:I if x ∈ R is given by (qn)n∈N with
(∀n)|x − qn| ≤ 2−n
I then (q′n) must satisfy
(∀n)|f (x)− q′n| ≤ 2−n
Norbert Müller (Trier) Darmstadt, 2012-10-05 8 / 34
Introduction
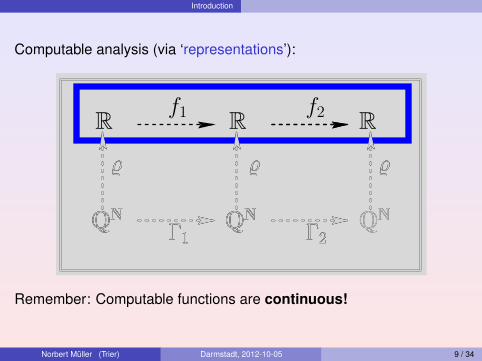
Computable analysis (via ‘representations’):
R f1 f2R R
QN
%% %
Γ1 Γ2QN QN
%% %
Γ1 Γ2QN QN
%% %
Γ1 Γ2QN QN QN
Remember: Computable functions are continuous!
Norbert Müller (Trier) Darmstadt, 2012-10-05 9 / 34
Computational complexity / efficient algorithms
1 Introduction
2 Computational complexity / efficient algorithms
3 Real vs. discrete computational complexity
Norbert Müller (Trier) Darmstadt, 2012-10-05 10 / 34
Computational complexity / efficient algorithms
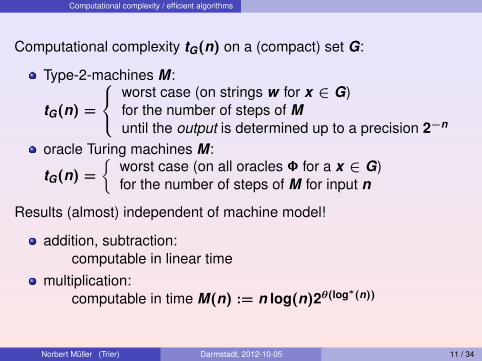
Computational complexity tG(n) on a (compact) set G:
Type-2-machines M :
tG(n) =
worst case (on strings w for x ∈ G)for the number of steps of Muntil the output is determined up to a precision 2−n
oracle Turing machines M :
tG(n) =
{worst case (on all oracles Φ for a x ∈ G)for the number of steps of M for input n
Results (almost) independent of machine model!
addition, subtraction:computable in linear time
multiplication:computable in time M(n) := n log(n)2θ(log∗(n))
Norbert Müller (Trier) Darmstadt, 2012-10-05 11 / 34
Computational complexity / efficient algorithms
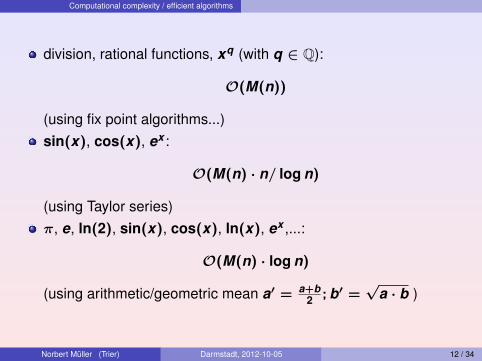
division, rational functions, xq (with q ∈ Q):
O(M(n))
(using fix point algorithms...)sin(x), cos(x), ex :
O(M(n) · n/ log n)
(using Taylor series)π, e, ln(2), sin(x), cos(x), ln(x), ex ,...:
O(M(n) · log n)
(using arithmetic/geometric mean a′ = a+b2 ; b′ =
√a · b )
Norbert Müller (Trier) Darmstadt, 2012-10-05 12 / 34
Computational complexity / efficient algorithms
important aspect: “modulus of computation”, “lookahead”, “delay”
to determine output with precision n,we need to know input with precision d(n)
Example: substitution of functions g and f :
tg◦f (n) = O( tg(n) + tf (dg(n)) )
dg◦f (n) = df (dg(n))
f with Lipschitz constant L⇒ delay df (n) ≈ n + log2 L possible
Norbert Müller (Trier) Darmstadt, 2012-10-05 13 / 34
Computational complexity / efficient algorithms
A complexity bound t : N→ N is called regular,if eventually t is monotonic increasing with
2 · t(n) ≤ t(2n) ≤ β · t(n)
then:
t is at least linear: id ∈ O(t)
t is polynomially bounded: ∃k t ∈ O(nk )
important closure properties:
linear increase:t(c · n) ∈ O(t)
sparse sums:dlog2 ne∑
k=0
t(2k ) ∈ O(t)
Norbert Müller (Trier) Darmstadt, 2012-10-05 14 / 34
Computational complexity / efficient algorithms
example:t(n) = bnα(log n)β(log log n)γc
for arbitrary α ≥ 1, β, γ ≥ 0, α, β, γ ∈ R are regular!bounds now implicitly regular (hence polynomial)!
Norbert Müller (Trier) Darmstadt, 2012-10-05 15 / 34
Computational complexity / efficient algorithms
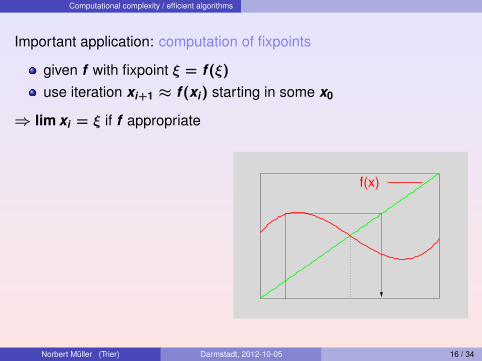
Important application: computation of fixpoints
given f with fixpoint ξ = f (ξ)
use iteration xi+1 ≈ f (xi) starting in some x0
⇒ lim xi = ξ if f appropriate
f(x)
Norbert Müller (Trier) Darmstadt, 2012-10-05 16 / 34
Computational complexity / efficient algorithms
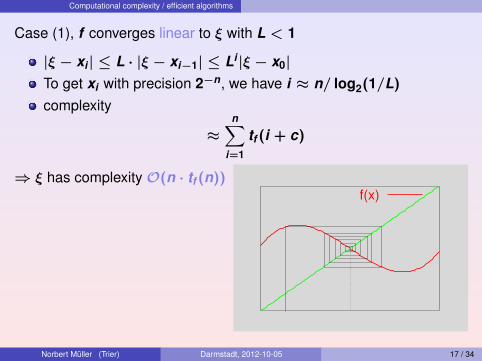
Case (1), f converges linear to ξ with L < 1
|ξ − xi | ≤ L · |ξ − xi−1| ≤ Li |ξ − x0|To get xi with precision 2−n, we have i ≈ n/ log2(1/L)
complexity
≈n∑
i=1
tf (i + c)
⇒ ξ has complexity O(n · tf (n))f(x)
Norbert Müller (Trier) Darmstadt, 2012-10-05 17 / 34
Computational complexity / efficient algorithms
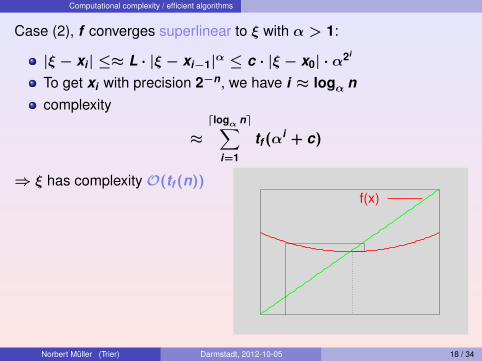
Case (2), f converges superlinear to ξ with α > 1:
|ξ − xi | ≤≈ L · |ξ − xi−1|α ≤ c · |ξ − x0| · α2i
To get xi with precision 2−n, we have i ≈ logα ncomplexity
≈dlogα ne∑
i=1
tf (αi + c)
⇒ ξ has complexity O(tf (n))f(x)
Norbert Müller (Trier) Darmstadt, 2012-10-05 18 / 34
Computational complexity / efficient algorithms
Applications:
f (x) = 2 · x + a · x2
mit ξ =1a
⇒ division is in O(M)
f (x) =x + a/x
2
mit ξ =√
a⇒ square root is in O(M)
Norbert Müller (Trier) Darmstadt, 2012-10-05 19 / 34
Computational complexity / efficient algorithms
Application: Differentiation
suppose f twice continuously differentiable
|f ′(x)−f (x + h)− f (x)
h| = |f ′(x)− f ′(ξ)|
= |f ′′(θ) · (x − ξ)|≤ |f ′′(θ) · h|
choose h ≈ 2−2n
⇒ f ′ has complexity O(tf (n)).
Norbert Müller (Trier) Darmstadt, 2012-10-05 20 / 34
Computational complexity / efficient algorithms
Applications:
inverse function, f 7→ f−1 (if f ′(x) 6= 0 on interval [a, b] ):f−1(a) is fixpoint of
x −f (x)− a
f ′(x)
⇒ f−1 has complexity O(tf (n))
root finding, f 7→ ξ, f (ξ) = 0 (with simple root ξ)
ξ = f−1(0)
⇒ root ξ has complexity O(tf (n))
numerical integration, f 7→∫
ff holomorphic on intervall [a, b]⇒ integral
∫ xa f (y)dy has complexity O(n2 · tf (n))
Norbert Müller (Trier) Darmstadt, 2012-10-05 21 / 34
Real vs. discrete computational complexity
1 Introduction
2 Computational complexity / efficient algorithms
3 Real vs. discrete computational complexity
Norbert Müller (Trier) Darmstadt, 2012-10-05 22 / 34
Real vs. discrete computational complexity
Consider functionals like
derivative : (f , x) 7→ f ′(x)
integral : (f , x, y) 7→∫ y
xf (t)dt
maximum : (f , x, y) 7→ max{f (t) | x ≤ t ≤ y}
maxarg : (f , x, y) 7→ z with f (z) = maximum(f , x, y)}
or operators like
derive : f 7→ f ′
integrate : f 7→ (y 7→ integral(f , 0, y))
maximize : f 7→ (y 7→ maximum(f , 0, y))
solve : f 7→ u with u′(x) = f (x, u(x)), u(0) = 0
Norbert Müller (Trier) Darmstadt, 2012-10-05 23 / 34
Real vs. discrete computational complexity
[Ko et al.]: non-uniform ‘negative’ results like (grossly shortened...)
∃f ∈ P+C[0, 1] with derive(f )(q) not computable for all q ∈ Q
P = NP iffmaximize(f ) is in P+C[0, 1] for all f ∈ P+C[0, 1]
#P = FP iffintegrate(f ) is in P+C[0, 1] for all f ∈ P+C[0, 1]
P = PSPACE iffsolve(f ) is in P+C[0, 1] for all f ∈ P+C[[0, 1]× [−1, 1]]
Norbert Müller (Trier) Darmstadt, 2012-10-05 24 / 34
Real vs. discrete computational complexity
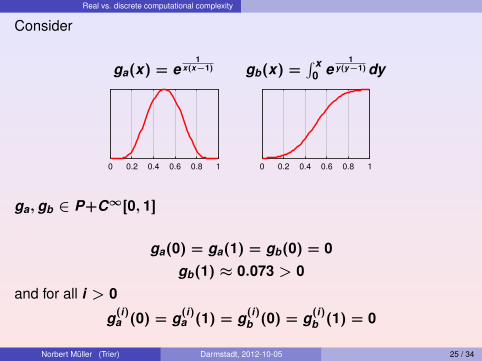
Consider
ga(x) = e1
x(x−1) gb(x) =∫ x
0 e1
y(y−1) dy
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
ga, gb ∈ P+C∞[0, 1]
ga(0) = ga(1) = gb(0) = 0gb(1) ≈ 0.073 > 0
and for all i > 0
g(i)a (0) = g(i)
a (1) = g(i)b (0) = g(i)
b (1) = 0
Norbert Müller (Trier) Darmstadt, 2012-10-05 25 / 34
Real vs. discrete computational complexity
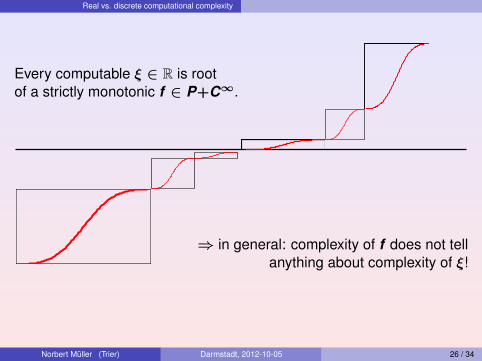
Every computable ξ ∈ R is rootof a strictly monotonic f ∈ P+C∞.
⇒ in general: complexity of f does not tellanything about complexity of ξ!
Norbert Müller (Trier) Darmstadt, 2012-10-05 26 / 34
Real vs. discrete computational complexity
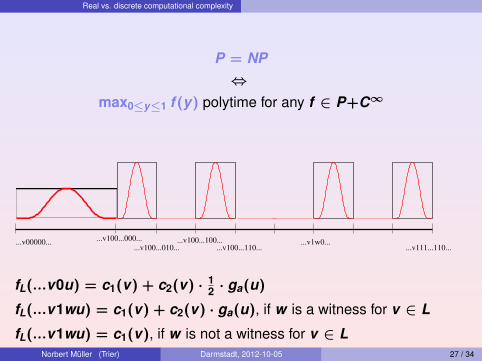
P = NP⇔
max0≤y≤1 f (y) polytime for any f ∈ P+C∞
...v100...010...
...v100...000... ...v100...100...
...v100...110......v1w0......v00000...
...v111...110...
fL(...v0u) = c1(v) + c2(v) · 12 · ga(u)
fL(...v1wu) = c1(v) + c2(v) · ga(u), if w is a witness for v ∈ L
fL(...v1wu) = c1(v), if w is not a witness for v ∈ LNorbert Müller (Trier) Darmstadt, 2012-10-05 27 / 34
Real vs. discrete computational complexity
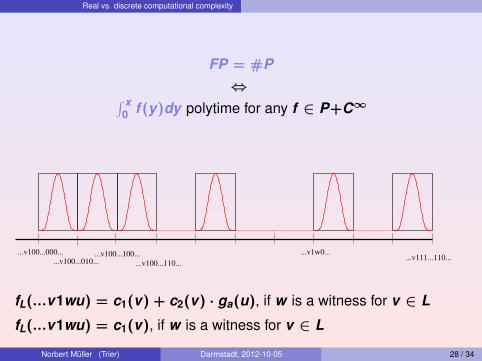
FP = #P⇔∫ x
0 f (y)dy polytime for any f ∈ P+C∞
...v1w0......v111...110...
...v100...000...
...v100...010...
...v100...100...
...v100...110...
fL(...v1wu) = c1(v) + c2(v) · ga(u), if w is a witness for v ∈ L
fL(...v1wu) = c1(v), if w is a witness for v ∈ L
Norbert Müller (Trier) Darmstadt, 2012-10-05 28 / 34
Real vs. discrete computational complexity
[M. et al]: non-uniform ‘positive’ results like
Let f be
holomorphic on compact G andcomputable in polynomial time t(n)
then
derive(f ) is computable in time t(n)
integrate(f ) is computable in time n2t(n)
solve(f ) is computable in time n2t(n2)
Norbert Müller (Trier) Darmstadt, 2012-10-05 29 / 34
Real vs. discrete computational complexity
suppose f holomorphic, f (x) =∑
ak xk
f is completely determined by arbitrary infinite set of valuesbasic operators: f 7→ (ak ) and (ak ) 7→ f map polytimeargumtents to polytime resultsfor many real operators Φ the complexity of Φ(f ) is comparable tof ’s complexity!
⇒ integration, differentiation, differential equations...via ‘formal’ operations on coeffizients
Norbert Müller (Trier) Darmstadt, 2012-10-05 30 / 34
Real vs. discrete computational complexity
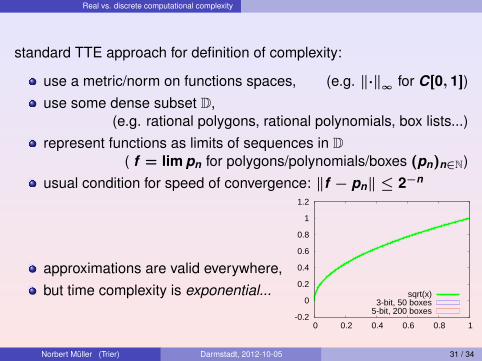
standard TTE approach for definition of complexity:
use a metric/norm on functions spaces, (e.g. ‖·‖∞ for C[0, 1])use some dense subset D,
(e.g. rational polygons, rational polynomials, box lists...)represent functions as limits of sequences in D
( f = lim pn for polygons/polynomials/boxes (pn)n∈N)usual condition for speed of convergence: ‖f − pn‖ ≤ 2−n
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
sqrt(x)3-bit, 50 boxes
5-bit, 200 boxes
approximations are valid everywhere,but time complexity is exponential...
Norbert Müller (Trier) Darmstadt, 2012-10-05 31 / 34
Real vs. discrete computational complexity
usual applications only needlocal approximations to functions!
; new computational model:
Instead of n 7→ pn for approximating f with
‖f − pn‖ ≤ 2−n
(i.e. pn is a ‘complete’ list of boxes f )
use (x, n) 7→ pn(x) with
|f (x)− pn(x)| ≤ 2−n
(i.e. just one single ‘box’)idea e.g. used in:
I Zhao/M. [CCA 2008]: Complexity of operators on compact setsI M. [CCA 2009]: Enhancing imperative exact real arithmetic...I Kawamura/Cook [STOC 2010]: Complexity theory for operators in
analysisNorbert Müller (Trier) Darmstadt, 2012-10-05 32 / 34
Real vs. discrete computational complexity
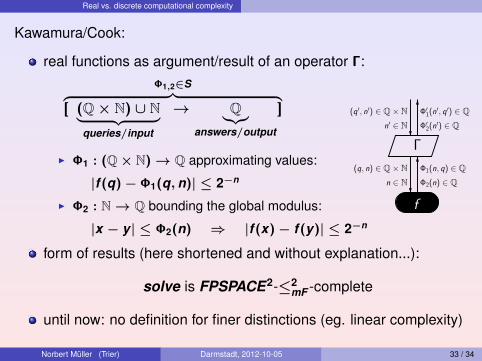
Kawamura/Cook:
real functions as argument/result of an operator Γ:Φ1,2∈S︷ ︸︸ ︷
[ (Q× N) ∪ N︸ ︷︷ ︸queries/input
→ Q︸︷︷︸answers/output
]n′ ∈ N
(q, n) ∈ Q×N
Γ
n ∈ N
(q′, n′) ∈ Q×N
Φ1(n, q) ∈ QΦ2(n) ∈ Q
Φ′2(n′) ∈ QΦ′1(n′, q′) ∈ Q
f
I Φ1 : (Q× N)→ Q approximating values:
|f (q)− Φ1(q, n)| ≤ 2−n
I Φ2 : N→ Q bounding the global modulus:
|x − y | ≤ Φ2(n) ⇒ |f (x)− f (y)| ≤ 2−n
form of results (here shortened and without explanation...):
solve is FPSPACE2-≤2mF -complete
until now: no definition for finer distinctions (eg. linear complexity)
Norbert Müller (Trier) Darmstadt, 2012-10-05 33 / 34
Real vs. discrete computational complexity
Thank you for your attention!
Any questions or remarks?
Norbert Müller (Trier) Darmstadt, 2012-10-05 34 / 34





























