-
7/29/2019 Radar Book Chapter3
1/15
Radar level
measurement
Radar level
measurement
The user's guideThe user's guide
-
7/29/2019 Radar Book Chapter3
2/15
Radar level measurement
- The users guide
Peter Devine
VEGA Controls / P Devine / 2000All rights reseved. No part of
this book may reproduced in any way, or by any means, without
priorpermissio in writing from the publisher:VEGA Controls Ltd,
Kendal House, Victoria Way, Burgess Hill, West Sussex, RH 15 9NF
England.
British Library Cataloguing in Publication Data
Devine, PeterRadar level measurement - The user s guide1.
Radar
2. Title621.3 848
ISBN 0-9538920-0-X
Cover by LinkDesign, Schramberg.Printed in Great Britain at VIP
print, Heathfield, Sussex.
written byPeter Devine
additional informationKarl Griebaum
type setting and layoutLiz Moakes
final drawings and diagramsEvi Brucker
-
7/29/2019 Radar Book Chapter3
3/15
Foreword ixAcknowledgement xiIntroduction xiii
Part I1. History of radar 12. Physics of radar 133. Types of
radar 33
1. CW-radar 332. FM - CW 363. Pulse radar 39
Part II4. Radar level measurement 47
1. FM - CW 482. PULSE radar 543. Choice of frequency 624.
Accuracy 685. Power 74
5. Radar antennas 771. Horn antennas 812. Dielectric rod
antennas 923. Measuring tube antennas 1014. Parabolic dish antennas
1065. Planar array antennas 108Antenna energy patterns 110
6. Installation 115
A.Mechanical installation 1151. Horn antenna (liquids) 1152. Rod
antenna (liquids) 1173. General consideration (liquids) 1204. Stand
pipes & measuring tubes 1275. Platic tank tops and windows
1346. Horn antenna (solids) 139
B.Radar level installation cont. 141
1. safe area applications 1412. Hazardous area applications
144
Contents
-
7/29/2019 Radar Book Chapter3
4/15
In continuous wave or CW Radar, acontinuous unmodulated
frequency is
transmitted and echoes are receivedfrom the target object. If
the targetobject is stationary, the frequency ofthe return echoes
will be the same asthe transmitted frequency. The range ofthe
object cannot be measured.
However, the frequency of the returnsignal from a moving object
is changeddepending on the speed and direction
of the object. This is the well knowndoppler effect. The doppler
effect isapparent when the siren note of anemergency vehicle
changes as it speedspast a pedestrian. The pitch of the siren
note is higher as it approaches the lis-tener and lower as it
recedes. The
doppler effect is also used byastronomers to monitor the
expansionof the Universe. By measuring the redshift of the spectrum
of distant starsand galaxies the rate of expansion canbe measured
and the age of distantobjects can be estimated.
In the same way, when an object thathas been illuminated by a CW
Radar
approaches the transmitter, the frequen-cy of the return signal
will be higherthan the transmitted frequency. Theecho frequency
will be lower if theobject is moving away.
33
3. Types of radar
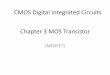
Fig 3.1 CW radar uses doppler shift to derive speed
measurement
targetvelocity
v
receivedf
requencyft
+fdp
transmitte
dfrequencyft,w
avelength
1a. CW, continuous wave radar
-
7/29/2019 Radar Book Chapter3
5/15
34
1b. CW wave-interference radar or bistatic CW radar
1c. Multiple frequency CW radar
In Fig 3.1, the aircraft is travellingtowards the CW radar.
Therefore the
received frequency is higher thanthe transmitted frequency and
the signof fdp is positive. If the aircraft wastravelling away from
the radar at the
same speed, the received frequencywould be ft - fdp.
The velocity of the target in thedirection of the radar is
calculated byequation 3.1
c is the velocity of microwavesv is the target velocityft is the
frequency of the
transmitted signal
fdp is the doppler beat frequencywhich is proportional to
velocity
ft+fdp is received frequency. The signof fdp depends upon
whether the
target is closing or receding
Standard continuous wave radar is
used for speed measurement and, asalready explained, the
distance to a sta-tionary object can not be calculated.However,
there will be a phase shiftbetween the transmitted signal and
thereturn signal.
If the starting position of the objectis known, CW radar could
be used todetect a change in position of up to halfwavelength (/2)
of the transmitted
wave by measuring the phase shift ofthe echo signal. Although
furthermovement could be detected, the range
would be ambiguous. With microwave
frequencies this means that the usefulmeasuring range would be
very limited.If the phase shifts of two slightly
different CW frequencies are measuredthe unambiguous range is
equal to thehalf wavelength (/2) of the differencefrequency. This
provides a usable dis-tance measurement device.
However, this technique is limited tomeasurement of a single
target.
Applications include surveying andautomobile obstacle
detection.
We have already mentioned that CWradar was used in early radar
detectionexperiments such as the famousDaventry experiment carried
out by
Robert Watson - Watt and his col-leagues. In this case, the
transmitterand receiver were separated by a con-siderable distance.
A moving objectwas detected by the receiver becausethere was
interference between the fre-
quency received directly from thetransmitter and the doppler
shifted fre-quency reflected off the target object.Although the
presence of the object is
detected, the position and speed cannotbe calculated.
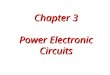
In essence, this is what happenswhen a low flying aircraft
interfereswith the picture on a television screen.See Fig 3.2.
v2
= =x fdp c x fdp
2 x ft
[Eq. 3.1]
-
7/29/2019 Radar Book Chapter3
6/15
3. Types of radar
target
transmitter
televisioninterfere
nce
reflectedsignal
(dopplershift)
transmitted
signalindirect
transmittedsignaldirect
Fig3.2Theeffectoflowflyingaircraftontelevisionreceptionissimilartothemethodof
detection
byCWwave-interferencera
dar
35
-
7/29/2019 Radar Book Chapter3
7/15
Single frequency CW radar cannotbe used for distance
measurement
because there is no time reference markto gauge the delay in the
return echofrom the target. A time reference markcan be achieved by
modulating the fre-quency in a known manner.
If we consider the frequency of thetransmitted signal ramping up
in alinear fashion, the difference betweenthe transmitting
frequency and the
frequency of the returned signal will beproportional to the
distance to thetarget.
If the distance to the target is R,and c is the speed of light,
then the
time taken for the return journey is:-
We can see from Fig. 3.3 that ifwe know the linear rate of
change ofthe transmitted signal and measure thedifference between
the transmitted and
received frequency fd, then we cancalculate the time t and hence
derivethe distance R.
36
time
fd
trans
mitte
dfreque
ncy
receive
dfre
quen
cy
frequency
Fig 3.3 The principle of FM - CW radar
2. FM-CW, frequency modulated continuous wave radar
t = 2 x Rc
t =
t
2 x R
c
[Eq. 3.2]
-
7/29/2019 Radar Book Chapter3
8/15
37
3. Types of radar
FM - CW wave forms transmitted frequency
received frequency
Fig 3.6 Saw tooth wave
Most commonly used
on most FM - CW
process radar level
transmitters
Fig 3.5 Triangular wave
Used on FM - CW
radar transmitters
frequency
4.4GHz
4.2GHz
10 GHz
9 GHz
frequency
time
time
time
frequency
Fig 3.4 Sine waveCommonly used on air-
craft radio altimeters
between 4.2 and
4.4 GHz
In practice, the FM - CW signal hasto be cyclic between two
different fre-
quencies. Radio altimeters modulatebetween 4.2 GHz and 4.4 GHz.
Radarlevel transmitters typically modulatebetween about 9 GHz and
10 GHz or
24 GHz and 26 GHz.The cyclic modulation of FM - CW
radar transmitter takes different forms.These are sinusoidal,
saw tooth ortriangular wave forms.
-
7/29/2019 Radar Book Chapter3
9/15
38
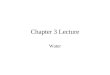
If we look at a triangular waveform we can see that there is an
inter-
ruption in the output of the differencefrequency , fd. In
practice, the receivedsignal is heterodyned with part of
thetransmitted frequency to produce thedifference frequency which
has a posi-
tive value independent of whether themodulation is increasing or
decreasing.
The diagram below makes theassumption that the target distance
isnot changing. If the target is moving,there will be a doppler
shift in the dif-ference frequency.
frequency
time
time
difference
frequency
fd
Fig 3.7 & 3.8 The change in direction between the ramping up
and down of the frequency
creates a short break in the measured value of the difference
frequency.
This has to be filtered out. The transmitted frequency is
represented by the
red line and the received frequency is represented by the dark
blue line.
The difference frequency is shown in light blue on the bottom
graph
-
7/29/2019 Radar Book Chapter3
10/15
Pulse radar is and has been usedwidely for distance measurement
since
the very beginnings of radar technolo-gy. The basic form of
pulse radar is apure time of flight measurement. Shortpulses,
typically of millisecond ornansecond duration, are transmittedand
the transit time to and from the tar-get is measured.
The pulses of a pulse radar are notdiscrete monopulses with a
single peak
of electromagnetic energy, but are infact a short wave packet.
The number
of waves and length of the pulsedepends upon the pulse duration
andthe carrier frequency that is used.
These regularly repeating pulseshave a relatively long time
delaybetween them to allow the return echoto be received before the
next pulse istransmitted.
39
3. Types of radar
The inter pulse period (the timebetween successive pulses) t is
theinverse of the pulse repetition
frequency fr or PRF. The pulse durationor pulse width, , is a
fraction of theinter pulse period.
The inter pulse period t effectivelydefines the maximum range of
theradar.ExampleThe pulse repetition frequency(PRF) is defined
as
If the pulse period t is 500 microsec-onds, then the pulse
repetition frequen-cy is two thousand pulses per second.
In 500 microseconds, the radar pulseswill travel 150 kilometres.
Consideringthe return journey of an echo reflectedoff a target,
this gives a maximum the-oretical range of 75 kilometres.
If the time taken for the returnjourney is T, and c is the speed
of light,then the distance to the target is
3. Pulse radar
Fig 3.9 Basic pulse radar
t
3rd
pulseTransmitted pulses
2nd
pulse 1st
pulse
1t Tx c2
fr = R =[Eq. 3.3]
a. Basic pulse radar
-
7/29/2019 Radar Book Chapter3
11/15
The pulses transmitted by a standardpulse radar can be
considered as a very
short burst of continuous wave radar.There is a single frequency
with nomodulation on the signal for the dura-tion of the pulse.
If the frequency of the waves of thetransmitted pulse is ft and
the target ismoving towards the radar with velocityv, then, as with
the CW radar alreadydescribed, the frequency of the return
pulse will be ft + fdp , where fdp is thedoppler beat frequency.
Similarly, thereceived frequency will be ft - fdp if thetarget is
moving away from the radar.
Therefore, a pulse doppler radar canbe used to measure speed,
distance anddirection.
The ability of the pulse dopplerradar to measure speed allows
the sys-tem to ignore stationary targets. This is
also commonly called moving targetindication or MTI radar.
In general, an MTI radar has accu-rate range measurement but
imprecisespeed measurement, whereas a pulsedoppler radar has
accurate speed mea-surement and imprecise distance
mea-surement.
The velocity of the target in thedirection of the radar is
calculated in
equation 3.4:
This is the same calculation as for
CW radar. The distance to the target iscalculated by the transit
time of thepulse, equation 3.3.
As well as being used to monitorcivil and military aircraft
movements,
pulse doppler radar is used in weatherforecasting. A doppler
shift is measuredwithin storm clouds which can be dis-tinguished
from general ground clut-ter. It is also used to measure theextreme
wind velocities within a torna-do or twister.
40
b. Pulse doppler radar
c
R
2
2
=
=
=x fdp c x fdp
2 x ft
T x c
[Eq. 3.4]
[Eq. 3.3]
-
7/29/2019 Radar Book Chapter3
12/15
3. Types of radar
Fig3.10
Pulsedopplerradarprovidestargetspeed,distanceanddirection
ft+fdp
ft
R
Pulse
dopplerrad
ar
41
-
7/29/2019 Radar Book Chapter3
13/15
42
With pulse radar, a shorter pulseduration enables better target
resolution
and therefore higher accuracy.However, a shorter pulse needs a
sig-nificantly higher peak power if therange performance has to be
main-tained. If there is a limit to the maxi-mum power available, a
short pulsewill inevitably result in a reducedrange.
With limited peak power, a longer
pulse duration,
, will provide more
radiated energy and therefore range but(with a standard pulse
radar) at the
expense of resolution and accuracy.Pulse compression within a
Chirp
radar is a method of achieving theaccuracy benefits of a short
pulse radartogether with the power benefits ofusing a longer pulse.
Essentially, Chirpradar is a cross between a pulse radarand an FM -
CW radar.
Fig 3.11 Chirp radar wave form. Chirp is a cross between pulse
and FM - CW radar
c. Pulse compression and Chirp radar
f1
f2
t1 t2
time
time
frequency
amplitude
-
7/29/2019 Radar Book Chapter3
14/15
43
3. Types of radar
Each pulse of a Chirp radar has lin-ear frequency modulation and
a con-
stant amplitude.The echo pulse is processed through
a filter that compresses the echo bycreating a time lag that is
inversely
proportional to the frequency.Therefore, the low frequency
that
arrives first is slowed down the mostand the subsequent higher
frequenciescatch up producing a sharper echo sig-nal and improved
echo resolution.
Another method of echo compres-sion uses binary phase
modulationwhere the transmitted signal is special-ly encoded with
segments of the pulseeither in phase or 180 out of phase.The return
echoes are decoded by a fil-
ter that produces a higher amplitudeand compressed signal.The
name Chirp radar comes from
the short rapid change in frequency ofthe pulse which is
analogous to thechirping of a bird song.
The above methods of radar detec-tion are used widely in long
range dis-tance or speed measurement. In thenext chapter we look at
which of thesemethods can be applied to the uniqueproblems involved
in measuring liquid
or solid levels within process vesselsand silos.
Pulse compression of chirp radar echo signal
Long frequency modulated echo pulse
Time
lag
Frequency
Filter
Compressed
signalFig 3.12 Pulse compression of chirp radar echo signal
-
7/29/2019 Radar Book Chapter3
15/15
45
Part IIRadar level measurement
Radar antennas
Radar level installations