Embed Size (px)
Citation preview

Providing distributed forecasts of precipitation using a Bayesian nowcast scheme
Neil I. Fox & Chris K. Wikle
University of Missouri - Columbia

Contents
ReasoningMethod / model
Statistical method Dynamics More reasoning
ProductsCase study exampleDevelopment

Reasoning
Need realistic representation of uncertainty in precipitation forecasts
Previous methods too deterministic (no measure of uncertainty) or too probabilistic (stochastic)
This methodology allows for the integration of some real physics with a realistic statistical formulation that can provide genuine information on forecast uncertainty

Hierarchical Model
5 stage model Data Process Spatial distributions Parameters

Spatio-Temporal Dynamic Models
)]()][([:s][Parameter
))(),(,),(()(:]Parameters|[Process
))(),(()(:]ParametersProcess, | [Data
11
tt
tYYfY
tYfZ
pd
ptpt
dtdt
Hierarchical Space-Time Framework:
Theorem Bayes' via
Data]|Parameters [Process,
:Obtain

Used in
Ecology: e.g. Model species dispersionData sparse obs: e.g. Scatterometer winds Long-term modeling: e.g. SST prediction

Model formulation
Stage 3: The integro-difference equation (IDE)
);()1;();()( tsdrtryrksy sst
ks(r;θs) is a redistribution kernel that describes how the process Y at time t is redistributed spatially at time t+1.
)()()(
2
1exp
)(2
1),( 1'
2/1 sss
s
ss srsrrk

IDE Kernel ParameterizationFor 2-D space, consider the multivariate Gaussian kernel for location s:
The kernel is centered at s + µ(θs) and thus the µ parameterscontrol the translation and the covariance parameters control thedilation and orientation.
* These parameters can be given spatial distributions at thenext level of the hierarchy!!
Alternative kernel parameterization: ellipse foci, e.g., Higdon et al. 1999

Spatial distributionModel the θs
parameters with a spatial distribution at the next level of the hierarchy
Gaussian random field•Diffusive wave fronts; shape and speed of diffusion depend on kernel width and tail behavior (dilation); (e.g., Kot et al. 1996)
•Non-diffusive propagation via relative displacement of kernel (translation); e.g., Wikle (2001; 2002)

Model implementation: MCMC
Markov Chain Monte-CarloGibbs sampler

Things this can do
Full spatial variance field Where do we have least confidence in the
forecast Quantitative uncertainty for defined points and
areas (i.e. catchment QPF uncertainty)

More things we can do
Incorporation of physics γ can become a spatially varying growth
parameter Kernel can incorporate windfield information

Products - domain
Nowcast fields Mean nowcast to T+60 (10 minute intervals at present)
Variance fields Uncertainty

Mean nowcast fields

Indication of uncertainty in space

Products - point / catchment
Nowcast reflectivity 10 minute intervals to T+60 With variance
Nowcast Rainfall Point or group of points Mean or median nowcast rainfall or
accumulation out to T+60 Cumulative frequency / probability distributions


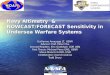
Rainrate distribution

Cumulative frequency of nowcast rainrate
0 500
50
100
Fre
quen
cy (
%) T+10
0 500
50
100
Fre
quen
cy (
%) T+20
0 500
50
100
Fre
quen
cy (
%) T+30
0 500
50
100
Fre
quen
cy (
%) T+40
0 500
50
100
Fre
quen
cy (
%) T+50
0 500
50
100
Fre
quen
cy (
%)
Rainrate (mm/hr)
T+60
0 500
50
100T+10
0 500
50
100T+20
0 500
50
100T+30
0 500
50
100T+40
0 500
50
100T+50
0 500
50
100
Rainrate (mm/hr)
T+60
0 500
50
100T+10
0 500
50
100T+20
0 500
50
100T+30
0 500
50
100T+40
0 500
50
100T+50
0 500
50
100
Rainrate (mm/hr)
T+60
0 500
50
100T+10
0 500
50
100T+20
0 500
50
100T+30
0 500
50
100T+40
0 500
50
100T+50
0 500
50
100
Rainrate (mm/hr)
T+60
Pixel 1 Pixel 2 Pixel 3 3 pixel aggreg

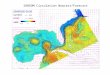
Cumulative frequency of nowcast rain accumulations
0 10 20 300
50
100
Fre
quen
cy (
%) T+10
0 10 20 300
50
100
Fre
quen
cy (
%) T+20
0 10 20 300
50
100
Fre
quen
cy (
%) T+30
0 10 20 300
50
100
Fre
quen
cy (
%) T+40
0 10 20 300
50
100
Fre
quen
cy (
%) T+50
0 10 20 300
50
100
Fre
quen
cy (
%)
Rain (mm)
T+60
0 10 20 300
50
100T+10
0 10 20 300
50
100T+20
0 10 20 300
50
100T+30
0 10 20 300
50
100T+40
0 10 20 300
50
100T+50
0 10 20 300
50
100
Rain (mm)
T+60
0 10 20 300
50
100T+10
0 10 20 300
50
100T+20
0 10 20 300
50
100T+30
0 10 20 300
50
100T+40
0 10 20 300
50
100T+50
0 10 20 300
50
100
Rain (mm)
T+60
0 10 20 300
50
100T+10
0 10 20 300
50
100T+20
0 10 20 300
50
100T+30
0 10 20 300
50
100T+40
0 10 20 300
50
100T+50
0 10 20 300
50
100
Rain (mm)
T+60
Pixel 1 Pixel 2 Pixel 3 3 pixel aggreg

In the future
Verification and adjustmentIncorporation of physicsComputational efficiencyHydrology
lumped model probabilities distributed probabilistic input

References
Wikle, C.K., Berliner, L.M., and Cressie, N. (1998). Hierarchical Bayesian space-time models. Environmental and Ecological Statistics, 5, 117-154.
Wikle, C.K., Milliff, R.F., Nychka, D., and L.M. Berliner, 2001: Spatiotemporal hierarchical Bayesian modeling: Tropical ocean surface winds, Journal of the American Statistical Association, 96, 382-397.
Berliner, L.M., Wikle, C.K., and Cressie, N., 2000: Long-lead prediction of Pacific SSTs via Bayesian dynamic modeling. Journal of Climate, 13, 3953-3968.
Xu, B., Wikle, C.K., and N.I. Fox, 2003: A kernel-based spatio-temporal dynamical model for nowcasting radar precipitation. Journal of the American Statistical Association. In review. Available at: http://solberg.snr.missouri.edu/People/fox/research/xuetal2003.pdf