Embed Size (px)
Citation preview

Research ArticleProportional Load Sharing and Stability of DC Microgrid withDistributed Architecture Using SM Controller
Muhammad Rashad 1 Uzair Raoof2 Muhammad Ashraf1 and Bilal Ashfaq Ahmed2
1Department of Electrical Engineering Capital University of Science and Technology (CUST) Kahuta RoadExpress Highway Islamabad 44000 Pakistan2Department of Electrical Engineering The University of Lahore (UOL) Defense Road Lahore 54000 Pakistan
Correspondence should be addressed to Muhammad Rashad muhammadrashadeeuoledupk
Received 7 September 2017 Revised 15 November 2017 Accepted 29 November 2017 Published 8 January 2018
Academic Editor Rafael Morales
Copyright copy 2018 Muhammad Rashad et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
DC microgrids look attractive in distribution systems due to their high reliability high efficiency and easy integration withrenewable energy sources The key objectives of the DC microgrid include proportional load sharing and precise voltageregulation Droop controllers are based on decentralized control architectures which are not effective in achieving these objectivessimultaneously due to the voltage error and load power variation A centralized controller can achieve these objectives using a highspeed communication link However it loses reliability due to the single point failure Additionally these controllers are realizedthrough proportional integral (PI) controllers which cannot ensure load sharing and stability in all operating conditions To addresslimitations a distributed architecture using sliding mode (SM) controller utilizing low bandwidth communication is proposedfor DC microgrids in this paper The main advantages are high reliability load power sharing and precise voltage regulationFurther the SM controller shows high robustness fast dynamic response and good stability for large load variations To analyzethe stability and dynamic performance a system model is developed and its transversality reachability and equivalent controlconditions are verified Furthermore the dynamic behavior of the modeled system is investigated for underdamped and criticallydamped responses Detailed simulations are carried out to show the effectiveness of the proposed controller
1 Introduction
Microgrids are a modern form of distribution systems whichcan function autonomously or in combination with a mainsupply grid Microgrids can operate in a low or mediumvoltage range and generate their ownpower that is renewablesources along with energy storage nonrenewable sourcesand power electronic (PE) controlled loads [1] The uniqueproperty of microgrids is that they can work in islandedmode under faulty conditions which increases the reliabilityof the power supply [2ndash4] In ACmicrogrids the distributionsystem isACACmicrogrids operation and control have beenexhaustively discussed in the literature [5 6] DC microgridsare paid attention from researchers due to the followingadvantages
(1) Most of the renewable sources are inherently DC orDC friendly So the integration of these sources with a DC
microgrid is easy as there is no requirement of frequencysynchronization circuits
(2) In DC microgrids reactive power compensators arenot required Hence their control will be relaxed as powerflow controllers are not required
(3) As DC electronic loads dominate today the unnec-essary AC-to-DC converters are not required in DC micro-grids This will directly affect system cost and efficiency
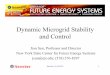
(4) Skin effect problems are absent in DC microgridsA general DC microgrid arrangement [7 8] connecting
different sources and loads is shown in Figure 1 To integratedissimilar elements PE converters (DC-to-DC AC-to-DCetc) are included among sources energy storage and micro-grids
Distributed generation can be connected to the DCmicrogrid through power PE converters in a parallel config-uration It is required to find efficient control to coordinate
HindawiMathematical Problems in EngineeringVolume 2018 Article ID 2717129 16 pageshttpsdoiorg10115520182717129
2 Mathematical Problems in Engineering
Source-1 PE converter-1
Load-1
Source-3 PE converter-3
Load-3
Source-j PE converter-j
Load-j
Source-2PE converter-2
Load-2
Source-nPE converter-n
Load-n
Node-1 Node-2
Node-3
Node-j
Node-n
i2i1
i3
iL2iL1
iL3
V2V1
V3
Vn
R line-
23
Rline-12
Rline-3j
Rline-jniLj
iLn
ij
Vj
in
Figure 1 General DC microgrid arrangement [8]
among various sources loads and energy storage The keyconcerns of the parallel connected converter are as followsthe first concern is the stability of the DC microgrid aselectronic loads are very sensitive to voltage deviationAnother concern is load sharing among various sources [7ndash9] However it is the nature of sources that only one unitcan establish the voltage level in a paralleling system Thereason is the output resistances of the power sources areextremely low Thus even a small difference in the outputvoltage between the paralleled sources will cause the one thatis a fewmVhigher to hog all the currentThe lower the outputvoltage of the module is the more severe this problem is [10]
To address the aforementioned challenges different con-trol schemes for DC microgrids are reported in [7 10ndash16]Commonly these control schemes can be categorized ascentralized and decentralized control [10ndash21] In centralizedcontrol the controller collects system data using a highbandwidth communication link schedules the tasks basedon the collected information and directs control decisions[12 16ndash18] However if the communication link fails this
will degrade the system performance and reliability Com-munication failure problems can be avoided in decentralizedcontrol (droop control) [13 14 19 22] In this type of controlPE converters operate on physical measured quantities Butthe improvement is achieved at the cost of partial stabilityand losing optimum operation due to the lack of operationalinformation and status of the other converters [23 24]In [25ndash29] droop control for AC microgrids is reportedTheir extensive use in conventional AC systems made themappealing to be used in DC microgrids [30ndash32]
Linear proportional integral (PI) controllers are used torealize the abovementioned control schemes for proportionalload sharing and stability of DC microgrids [30ndash32] Despitethe easy implementation of these controllers they suffer poorsharing In many cases the stability of PI controllers cannotbe ensured [33 34] Since PI controllers are linear type con-trollers the control parameters of these controllers cannot beoptimized as they are tuned for specific load conditions Fur-ther they also exhibit a slower dynamic response [35] Henceusing these controllers for load sharing is not desirable
Mathematical Problems in Engineering 3
Sliding mode control (SMC) for proportional load shar-ing and stability of DC microgrids is proposed in this paperSMC for microgrid type systems is reported in [9 36ndash40] SM is a controller which is used for variable structuresystems [36] It is a nonlinear controller which shows robustbehavior to thematched uncertaintiesThe SM controller canbe easily implemented using integrated circuits Hence theSM controller is proposed for proportional load sharing andstability of DC microgrids
Section 2 deals with the load sharing control schemesused in DC microgrids Further a system model and itsanalysis through the SM controller are presented Further-more this section deals with system stability and dynamicbehavior design Detailed simulation studies are performedin Section 3 Section 4 concludes this paper
2 Load Sharing Control in DC Microgrids
The objective of the control in DC microgrids is to achieveload sharing and maintain precise voltage regulation amongthe sources The sharing control can be categorized into thefollowing types
21 Centralized Control In this type of control the controllercollects system data using a communication link and directscontrol decisions This type of control scheme is reportedin [12 16ndash18] and is shown in Figure 2 The PE converterof each source contains primary control and inner voltageand current control Centralized control gives directionsand control decisions to the other primary controllers Thevoltage of the DC microgrid is communicated to the centralcontroller where it is compared with the reference voltageThe error produced is transferred to the PI controller whoseoutput is communicated to the primary controller of eachsource as shown in Figure 2 However if a single pointfailure occurs this will degrade the system performance andreliability Hence using centralize control for load sharingand voltage regulation in DC microgrids is not attractive
22 Decentralized Control Single point failure problems canbe avoided in decentralized control (droop control) [13 1419 22] In this type of control PE converters operate on localphysicalmeasured quantitiesThis does not require a separatecentral controller Decentralized control sets the values fordroop control which derives the inner voltage and currentcontrol of the PE converters as shown in Figure 3
Droop control cannot achieve load sharing and voltageregulation simultaneously Limitations of the droop controlare examined below
221 Current Sharing Inaccuracy Current sharing will beaffected due to the voltage error in parallel connected DC-to-DC converters This problem becomes challenging dueto the extra voltage drop across the line connecting parallelsources or when the characteristics of different sources arenot the same Hence current sharing among various sourcesis deteriorated To analyze this problem a DC microgridwith two sources is shown in Figure 4 where each source ismodeled by its Thevenin equivalent circuit
The droop control used in DC systems can be expressedas
V119904119895 = V119904 minus 119894dc119895119877119889119895 where 119895 = 1 2 (1)
where V119904119895 V119904 119894dc119895 and 119877119889119895 are node voltage source voltagesource current and virtual resistance of each source respec-tively The virtual resistance defined in (1) is equal to theoutput resistance and the output voltage of each source isequal to V119904 as shown in Figure 4 Consider the load is drawingrated current and the system has reached a steady state Thefollowing can be derived from Figure 4
Vload = V119904 minus 119894dc11198771198891 minus 119894dc1119877line1 (2a)
Vload = V119904 minus 119894dc21198771198892 minus 119894dc2119877line2 (2b)
After simplification these equations can be written as
119894dc1119894dc2 =11987711988921198771198891 +
119877line2 minus (11987711988921198771198891) 119877line11198771198891 + 119877line1 (3)
The above equation shows that in droop controlled DCgrids the current of both sources is inversely proportionalto their virtual resistance Usually it is assumed that DCmicrogrids are small-scale grids and the connecting lines willcontain resistance of a small value Hence virtual resistance119877119889119895 can be selected large Since 119877119889119895 ≫ 119877line the aboveexpression can be written as
119894dc1119894dc2 =1198771198892 + 119877line21198771198891 + 119877line1 asymp
11987711988921198771198891 (4)
But the abovementioned assumption is suitable for large 119877119889119895For small 119877119889119895 precise current sharing cannot be ensuredMeanwhile voltage regulation cannot be ensured with largevirtual resistance This is graphically shown in Figure 5
222 Output Voltage Deviation Node voltage deviation canbe written as
ΔV119895 = V119904 minus V119904119895 = 119894dc119895119877119889119895 where 119895 = 1 2 (5)
Figure 6 shows the voltage deviation with different virtualresistances Voltage deviation is of zero value when thesources operate in an open circuit mode (source currents arezero) as shown in Figure 6When the current by the sources isnot zero voltage deviation appears and its value varies withthe variation in load To limit the output voltage deviationwithin acceptable levels the droop coefficient 119877119889119895 should belimited as
119877119889119895 le ΔVmax119894fl119895 (6)
where 119894fl119895 is full-load current of source-j
23 Distributive Control Disadvantages associated with thedecentralized (droop control) and centralized control canbe adjusted using distributed control which is an alternativesolution to achieve efficient load sharing As a substitute of
4 Mathematical Problems in Engineering
Droop controlInner control
PEC-2
PI+
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Communication
Load-2
Load-1
`
DC microgrid
DC power flow
Information flow
Centralized control
VG-ref
VG
minus
Figure 2 Centralized control in a DC microgrid
Droop controlInner control
PEC-2
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Load-2
Load-1
DC microgrid
DC power flow
Information flow
Figure 3 Decentralized control
Mathematical Problems in Engineering 5
+ +
Node-1 Node-2
idc1 idc2
Rd1 Rd2
Vs Vsminus
minus minus minus
+
minus
+
+
Vs1
Rline1 Rline2
Rload Vload Vs2
Figure 4 Thevenin equivalent circuit of a DC microgrid with two sources sharing the same load
Volta
ge
Current
Small droop
Largedroop
load
load
Rd2 + Rline2
Rd1 + Rline1
idc2 idc2 idc1 idc1
Figure 5 Current sharing inaccuracy using droop control [7]
Source current
Sour
ce v
olta
ge
Voltage deviation
0
s
s2
s1
Rd1
Rd2
idc2 idc1
Δ1 Δ2 = 0
Δ1Δ2
Figure 6 Voltage deviationwith a variation in droop resistances [8]
the single central controller distributive control is distributedamong every PE converter In [24] DC bus signaling (DBS)is proposed for distributed control in which DC voltageis used to communicate the decision about the convertersrsquooperation In DBS every entity in the system senses the DCvoltage level for operation and decisions which limits the
sources loads and storage because DC bus voltage cannot beallocated unlimitedly Furthermore some extreme situations(eg overvoltagecurrent and fully chargedunderchargedbattery) are not addressed in DBS In [41] a current sharingline is proposed and distributed in which the average currentis communicated among converters for operation In DCmicrogrids sources are displaced from each other over aregion Thus the current sharing bus needs to be distributedover the region with the power lines This may inject sub-stantial noise which can degrade the system performanceIn [42] a distributive secondary control using power linesignaling (PLS) is presented The major problem in PLS isthat it is has slow communication Further electromagneticcompatibility issues need to be addressed when using it withelectronic devices
In this paper a distributive control for DC microgridsusing low bandwidth communication is proposed and isshown in Figure 7
To determine the value of current to be shared by eachsource the controller of each source communicates amongthe other sources and informs about the per-unit (pu) cur-rent supplied by itThis information is used by each controllerto determine the total current supplied by all sources whichis given as
119894pu119879 = 119899sum119898=1119894pu119895 (7)
where 119894pu119895 is the pu current of source-j and 119899 is the number ofsourcesThe reference current of each source 119894ref119895 is calculatedas
119894ref119895 = 119896119895119894rated119895 119894pu119879 (8)
where 119896119895 and 119894rated119895 are the load sharing factor and ratedcurrent of source-j respectively
In the architecture shown in Figure 7 the pu currentof each source is shared Hence the data transmitted overthe communication link by each source is 2 bytes and thetotal data transmitted is 2119899 bytes Data read by each source is2(119899minus 1) bytes Hence the technique used for communicationhas to manage small data and thus a low bandwidth commu-nication is feasible So computer area network (CAN) basedcommunication is used for DC microgrids in this paper
6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
Source-1 PE converter-1
Load-1
Source-3 PE converter-3
Load-3
Source-j PE converter-j
Load-j
Source-2PE converter-2
Load-2
Source-nPE converter-n
Load-n
Node-1 Node-2
Node-3
Node-j
Node-n
i2i1
i3
iL2iL1
iL3
V2V1
V3
Vn
R line-
23
Rline-12
Rline-3j
Rline-jniLj
iLn
ij
Vj
in
Figure 1 General DC microgrid arrangement [8]
among various sources loads and energy storage The keyconcerns of the parallel connected converter are as followsthe first concern is the stability of the DC microgrid aselectronic loads are very sensitive to voltage deviationAnother concern is load sharing among various sources [7ndash9] However it is the nature of sources that only one unitcan establish the voltage level in a paralleling system Thereason is the output resistances of the power sources areextremely low Thus even a small difference in the outputvoltage between the paralleled sources will cause the one thatis a fewmVhigher to hog all the currentThe lower the outputvoltage of the module is the more severe this problem is [10]
To address the aforementioned challenges different con-trol schemes for DC microgrids are reported in [7 10ndash16]Commonly these control schemes can be categorized ascentralized and decentralized control [10ndash21] In centralizedcontrol the controller collects system data using a highbandwidth communication link schedules the tasks basedon the collected information and directs control decisions[12 16ndash18] However if the communication link fails this
will degrade the system performance and reliability Com-munication failure problems can be avoided in decentralizedcontrol (droop control) [13 14 19 22] In this type of controlPE converters operate on physical measured quantities Butthe improvement is achieved at the cost of partial stabilityand losing optimum operation due to the lack of operationalinformation and status of the other converters [23 24]In [25ndash29] droop control for AC microgrids is reportedTheir extensive use in conventional AC systems made themappealing to be used in DC microgrids [30ndash32]
Linear proportional integral (PI) controllers are used torealize the abovementioned control schemes for proportionalload sharing and stability of DC microgrids [30ndash32] Despitethe easy implementation of these controllers they suffer poorsharing In many cases the stability of PI controllers cannotbe ensured [33 34] Since PI controllers are linear type con-trollers the control parameters of these controllers cannot beoptimized as they are tuned for specific load conditions Fur-ther they also exhibit a slower dynamic response [35] Henceusing these controllers for load sharing is not desirable
Mathematical Problems in Engineering 3
Sliding mode control (SMC) for proportional load shar-ing and stability of DC microgrids is proposed in this paperSMC for microgrid type systems is reported in [9 36ndash40] SM is a controller which is used for variable structuresystems [36] It is a nonlinear controller which shows robustbehavior to thematched uncertaintiesThe SM controller canbe easily implemented using integrated circuits Hence theSM controller is proposed for proportional load sharing andstability of DC microgrids
Section 2 deals with the load sharing control schemesused in DC microgrids Further a system model and itsanalysis through the SM controller are presented Further-more this section deals with system stability and dynamicbehavior design Detailed simulation studies are performedin Section 3 Section 4 concludes this paper
2 Load Sharing Control in DC Microgrids
The objective of the control in DC microgrids is to achieveload sharing and maintain precise voltage regulation amongthe sources The sharing control can be categorized into thefollowing types
21 Centralized Control In this type of control the controllercollects system data using a communication link and directscontrol decisions This type of control scheme is reportedin [12 16ndash18] and is shown in Figure 2 The PE converterof each source contains primary control and inner voltageand current control Centralized control gives directionsand control decisions to the other primary controllers Thevoltage of the DC microgrid is communicated to the centralcontroller where it is compared with the reference voltageThe error produced is transferred to the PI controller whoseoutput is communicated to the primary controller of eachsource as shown in Figure 2 However if a single pointfailure occurs this will degrade the system performance andreliability Hence using centralize control for load sharingand voltage regulation in DC microgrids is not attractive
22 Decentralized Control Single point failure problems canbe avoided in decentralized control (droop control) [13 1419 22] In this type of control PE converters operate on localphysicalmeasured quantitiesThis does not require a separatecentral controller Decentralized control sets the values fordroop control which derives the inner voltage and currentcontrol of the PE converters as shown in Figure 3
Droop control cannot achieve load sharing and voltageregulation simultaneously Limitations of the droop controlare examined below
221 Current Sharing Inaccuracy Current sharing will beaffected due to the voltage error in parallel connected DC-to-DC converters This problem becomes challenging dueto the extra voltage drop across the line connecting parallelsources or when the characteristics of different sources arenot the same Hence current sharing among various sourcesis deteriorated To analyze this problem a DC microgridwith two sources is shown in Figure 4 where each source ismodeled by its Thevenin equivalent circuit
The droop control used in DC systems can be expressedas
V119904119895 = V119904 minus 119894dc119895119877119889119895 where 119895 = 1 2 (1)
where V119904119895 V119904 119894dc119895 and 119877119889119895 are node voltage source voltagesource current and virtual resistance of each source respec-tively The virtual resistance defined in (1) is equal to theoutput resistance and the output voltage of each source isequal to V119904 as shown in Figure 4 Consider the load is drawingrated current and the system has reached a steady state Thefollowing can be derived from Figure 4
Vload = V119904 minus 119894dc11198771198891 minus 119894dc1119877line1 (2a)
Vload = V119904 minus 119894dc21198771198892 minus 119894dc2119877line2 (2b)
After simplification these equations can be written as
119894dc1119894dc2 =11987711988921198771198891 +
119877line2 minus (11987711988921198771198891) 119877line11198771198891 + 119877line1 (3)
The above equation shows that in droop controlled DCgrids the current of both sources is inversely proportionalto their virtual resistance Usually it is assumed that DCmicrogrids are small-scale grids and the connecting lines willcontain resistance of a small value Hence virtual resistance119877119889119895 can be selected large Since 119877119889119895 ≫ 119877line the aboveexpression can be written as
119894dc1119894dc2 =1198771198892 + 119877line21198771198891 + 119877line1 asymp
11987711988921198771198891 (4)
But the abovementioned assumption is suitable for large 119877119889119895For small 119877119889119895 precise current sharing cannot be ensuredMeanwhile voltage regulation cannot be ensured with largevirtual resistance This is graphically shown in Figure 5
222 Output Voltage Deviation Node voltage deviation canbe written as
ΔV119895 = V119904 minus V119904119895 = 119894dc119895119877119889119895 where 119895 = 1 2 (5)
Figure 6 shows the voltage deviation with different virtualresistances Voltage deviation is of zero value when thesources operate in an open circuit mode (source currents arezero) as shown in Figure 6When the current by the sources isnot zero voltage deviation appears and its value varies withthe variation in load To limit the output voltage deviationwithin acceptable levels the droop coefficient 119877119889119895 should belimited as
119877119889119895 le ΔVmax119894fl119895 (6)
where 119894fl119895 is full-load current of source-j
23 Distributive Control Disadvantages associated with thedecentralized (droop control) and centralized control canbe adjusted using distributed control which is an alternativesolution to achieve efficient load sharing As a substitute of
4 Mathematical Problems in Engineering
Droop controlInner control
PEC-2
PI+
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Communication
Load-2
Load-1
`
DC microgrid
DC power flow
Information flow
Centralized control
VG-ref
VG
minus
Figure 2 Centralized control in a DC microgrid
Droop controlInner control
PEC-2
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Load-2
Load-1
DC microgrid
DC power flow
Information flow
Figure 3 Decentralized control
Mathematical Problems in Engineering 5
+ +
Node-1 Node-2
idc1 idc2
Rd1 Rd2
Vs Vsminus
minus minus minus
+
minus
+
+
Vs1
Rline1 Rline2
Rload Vload Vs2
Figure 4 Thevenin equivalent circuit of a DC microgrid with two sources sharing the same load
Volta
ge
Current
Small droop
Largedroop
load
load
Rd2 + Rline2
Rd1 + Rline1
idc2 idc2 idc1 idc1
Figure 5 Current sharing inaccuracy using droop control [7]
Source current
Sour
ce v
olta
ge
Voltage deviation
0
s
s2
s1
Rd1
Rd2
idc2 idc1
Δ1 Δ2 = 0
Δ1Δ2
Figure 6 Voltage deviationwith a variation in droop resistances [8]
the single central controller distributive control is distributedamong every PE converter In [24] DC bus signaling (DBS)is proposed for distributed control in which DC voltageis used to communicate the decision about the convertersrsquooperation In DBS every entity in the system senses the DCvoltage level for operation and decisions which limits the
sources loads and storage because DC bus voltage cannot beallocated unlimitedly Furthermore some extreme situations(eg overvoltagecurrent and fully chargedunderchargedbattery) are not addressed in DBS In [41] a current sharingline is proposed and distributed in which the average currentis communicated among converters for operation In DCmicrogrids sources are displaced from each other over aregion Thus the current sharing bus needs to be distributedover the region with the power lines This may inject sub-stantial noise which can degrade the system performanceIn [42] a distributive secondary control using power linesignaling (PLS) is presented The major problem in PLS isthat it is has slow communication Further electromagneticcompatibility issues need to be addressed when using it withelectronic devices
In this paper a distributive control for DC microgridsusing low bandwidth communication is proposed and isshown in Figure 7
To determine the value of current to be shared by eachsource the controller of each source communicates amongthe other sources and informs about the per-unit (pu) cur-rent supplied by itThis information is used by each controllerto determine the total current supplied by all sources whichis given as
119894pu119879 = 119899sum119898=1119894pu119895 (7)
where 119894pu119895 is the pu current of source-j and 119899 is the number ofsourcesThe reference current of each source 119894ref119895 is calculatedas
119894ref119895 = 119896119895119894rated119895 119894pu119879 (8)
where 119896119895 and 119894rated119895 are the load sharing factor and ratedcurrent of source-j respectively
In the architecture shown in Figure 7 the pu currentof each source is shared Hence the data transmitted overthe communication link by each source is 2 bytes and thetotal data transmitted is 2119899 bytes Data read by each source is2(119899minus 1) bytes Hence the technique used for communicationhas to manage small data and thus a low bandwidth commu-nication is feasible So computer area network (CAN) basedcommunication is used for DC microgrids in this paper
6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
Sliding mode control (SMC) for proportional load shar-ing and stability of DC microgrids is proposed in this paperSMC for microgrid type systems is reported in [9 36ndash40] SM is a controller which is used for variable structuresystems [36] It is a nonlinear controller which shows robustbehavior to thematched uncertaintiesThe SM controller canbe easily implemented using integrated circuits Hence theSM controller is proposed for proportional load sharing andstability of DC microgrids
Section 2 deals with the load sharing control schemesused in DC microgrids Further a system model and itsanalysis through the SM controller are presented Further-more this section deals with system stability and dynamicbehavior design Detailed simulation studies are performedin Section 3 Section 4 concludes this paper
2 Load Sharing Control in DC Microgrids
The objective of the control in DC microgrids is to achieveload sharing and maintain precise voltage regulation amongthe sources The sharing control can be categorized into thefollowing types
21 Centralized Control In this type of control the controllercollects system data using a communication link and directscontrol decisions This type of control scheme is reportedin [12 16ndash18] and is shown in Figure 2 The PE converterof each source contains primary control and inner voltageand current control Centralized control gives directionsand control decisions to the other primary controllers Thevoltage of the DC microgrid is communicated to the centralcontroller where it is compared with the reference voltageThe error produced is transferred to the PI controller whoseoutput is communicated to the primary controller of eachsource as shown in Figure 2 However if a single pointfailure occurs this will degrade the system performance andreliability Hence using centralize control for load sharingand voltage regulation in DC microgrids is not attractive
22 Decentralized Control Single point failure problems canbe avoided in decentralized control (droop control) [13 1419 22] In this type of control PE converters operate on localphysicalmeasured quantitiesThis does not require a separatecentral controller Decentralized control sets the values fordroop control which derives the inner voltage and currentcontrol of the PE converters as shown in Figure 3
Droop control cannot achieve load sharing and voltageregulation simultaneously Limitations of the droop controlare examined below
221 Current Sharing Inaccuracy Current sharing will beaffected due to the voltage error in parallel connected DC-to-DC converters This problem becomes challenging dueto the extra voltage drop across the line connecting parallelsources or when the characteristics of different sources arenot the same Hence current sharing among various sourcesis deteriorated To analyze this problem a DC microgridwith two sources is shown in Figure 4 where each source ismodeled by its Thevenin equivalent circuit
The droop control used in DC systems can be expressedas
V119904119895 = V119904 minus 119894dc119895119877119889119895 where 119895 = 1 2 (1)
where V119904119895 V119904 119894dc119895 and 119877119889119895 are node voltage source voltagesource current and virtual resistance of each source respec-tively The virtual resistance defined in (1) is equal to theoutput resistance and the output voltage of each source isequal to V119904 as shown in Figure 4 Consider the load is drawingrated current and the system has reached a steady state Thefollowing can be derived from Figure 4
Vload = V119904 minus 119894dc11198771198891 minus 119894dc1119877line1 (2a)
Vload = V119904 minus 119894dc21198771198892 minus 119894dc2119877line2 (2b)
After simplification these equations can be written as
119894dc1119894dc2 =11987711988921198771198891 +
119877line2 minus (11987711988921198771198891) 119877line11198771198891 + 119877line1 (3)
The above equation shows that in droop controlled DCgrids the current of both sources is inversely proportionalto their virtual resistance Usually it is assumed that DCmicrogrids are small-scale grids and the connecting lines willcontain resistance of a small value Hence virtual resistance119877119889119895 can be selected large Since 119877119889119895 ≫ 119877line the aboveexpression can be written as
119894dc1119894dc2 =1198771198892 + 119877line21198771198891 + 119877line1 asymp
11987711988921198771198891 (4)
But the abovementioned assumption is suitable for large 119877119889119895For small 119877119889119895 precise current sharing cannot be ensuredMeanwhile voltage regulation cannot be ensured with largevirtual resistance This is graphically shown in Figure 5
222 Output Voltage Deviation Node voltage deviation canbe written as
ΔV119895 = V119904 minus V119904119895 = 119894dc119895119877119889119895 where 119895 = 1 2 (5)
Figure 6 shows the voltage deviation with different virtualresistances Voltage deviation is of zero value when thesources operate in an open circuit mode (source currents arezero) as shown in Figure 6When the current by the sources isnot zero voltage deviation appears and its value varies withthe variation in load To limit the output voltage deviationwithin acceptable levels the droop coefficient 119877119889119895 should belimited as
119877119889119895 le ΔVmax119894fl119895 (6)
where 119894fl119895 is full-load current of source-j
23 Distributive Control Disadvantages associated with thedecentralized (droop control) and centralized control canbe adjusted using distributed control which is an alternativesolution to achieve efficient load sharing As a substitute of
4 Mathematical Problems in Engineering
Droop controlInner control
PEC-2
PI+
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Communication
Load-2
Load-1
`
DC microgrid
DC power flow
Information flow
Centralized control
VG-ref
VG
minus
Figure 2 Centralized control in a DC microgrid
Droop controlInner control
PEC-2
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Load-2
Load-1
DC microgrid
DC power flow
Information flow
Figure 3 Decentralized control
Mathematical Problems in Engineering 5
+ +
Node-1 Node-2
idc1 idc2
Rd1 Rd2
Vs Vsminus
minus minus minus
+
minus
+
+
Vs1
Rline1 Rline2
Rload Vload Vs2
Figure 4 Thevenin equivalent circuit of a DC microgrid with two sources sharing the same load
Volta
ge
Current
Small droop
Largedroop
load
load
Rd2 + Rline2
Rd1 + Rline1
idc2 idc2 idc1 idc1
Figure 5 Current sharing inaccuracy using droop control [7]
Source current
Sour
ce v
olta
ge
Voltage deviation
0
s
s2
s1
Rd1
Rd2
idc2 idc1
Δ1 Δ2 = 0
Δ1Δ2
Figure 6 Voltage deviationwith a variation in droop resistances [8]
the single central controller distributive control is distributedamong every PE converter In [24] DC bus signaling (DBS)is proposed for distributed control in which DC voltageis used to communicate the decision about the convertersrsquooperation In DBS every entity in the system senses the DCvoltage level for operation and decisions which limits the
sources loads and storage because DC bus voltage cannot beallocated unlimitedly Furthermore some extreme situations(eg overvoltagecurrent and fully chargedunderchargedbattery) are not addressed in DBS In [41] a current sharingline is proposed and distributed in which the average currentis communicated among converters for operation In DCmicrogrids sources are displaced from each other over aregion Thus the current sharing bus needs to be distributedover the region with the power lines This may inject sub-stantial noise which can degrade the system performanceIn [42] a distributive secondary control using power linesignaling (PLS) is presented The major problem in PLS isthat it is has slow communication Further electromagneticcompatibility issues need to be addressed when using it withelectronic devices
In this paper a distributive control for DC microgridsusing low bandwidth communication is proposed and isshown in Figure 7
To determine the value of current to be shared by eachsource the controller of each source communicates amongthe other sources and informs about the per-unit (pu) cur-rent supplied by itThis information is used by each controllerto determine the total current supplied by all sources whichis given as
119894pu119879 = 119899sum119898=1119894pu119895 (7)
where 119894pu119895 is the pu current of source-j and 119899 is the number ofsourcesThe reference current of each source 119894ref119895 is calculatedas
119894ref119895 = 119896119895119894rated119895 119894pu119879 (8)
where 119896119895 and 119894rated119895 are the load sharing factor and ratedcurrent of source-j respectively
In the architecture shown in Figure 7 the pu currentof each source is shared Hence the data transmitted overthe communication link by each source is 2 bytes and thetotal data transmitted is 2119899 bytes Data read by each source is2(119899minus 1) bytes Hence the technique used for communicationhas to manage small data and thus a low bandwidth commu-nication is feasible So computer area network (CAN) basedcommunication is used for DC microgrids in this paper
6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
Droop controlInner control
PEC-2
PI+
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Communication
Load-2
Load-1
`
DC microgrid
DC power flow
Information flow
Centralized control
VG-ref
VG
minus
Figure 2 Centralized control in a DC microgrid
Droop controlInner control
PEC-2
Droop controlInner control
PEC-1
Droop controlInner control
PEC-3
Load-2
Load-1
DC microgrid
DC power flow
Information flow
Figure 3 Decentralized control
Mathematical Problems in Engineering 5
+ +
Node-1 Node-2
idc1 idc2
Rd1 Rd2
Vs Vsminus
minus minus minus
+
minus
+
+
Vs1
Rline1 Rline2
Rload Vload Vs2
Figure 4 Thevenin equivalent circuit of a DC microgrid with two sources sharing the same load
Volta
ge
Current
Small droop
Largedroop
load
load
Rd2 + Rline2
Rd1 + Rline1
idc2 idc2 idc1 idc1
Figure 5 Current sharing inaccuracy using droop control [7]
Source current
Sour
ce v
olta
ge
Voltage deviation
0
s
s2
s1
Rd1
Rd2
idc2 idc1
Δ1 Δ2 = 0
Δ1Δ2
Figure 6 Voltage deviationwith a variation in droop resistances [8]
the single central controller distributive control is distributedamong every PE converter In [24] DC bus signaling (DBS)is proposed for distributed control in which DC voltageis used to communicate the decision about the convertersrsquooperation In DBS every entity in the system senses the DCvoltage level for operation and decisions which limits the
sources loads and storage because DC bus voltage cannot beallocated unlimitedly Furthermore some extreme situations(eg overvoltagecurrent and fully chargedunderchargedbattery) are not addressed in DBS In [41] a current sharingline is proposed and distributed in which the average currentis communicated among converters for operation In DCmicrogrids sources are displaced from each other over aregion Thus the current sharing bus needs to be distributedover the region with the power lines This may inject sub-stantial noise which can degrade the system performanceIn [42] a distributive secondary control using power linesignaling (PLS) is presented The major problem in PLS isthat it is has slow communication Further electromagneticcompatibility issues need to be addressed when using it withelectronic devices
In this paper a distributive control for DC microgridsusing low bandwidth communication is proposed and isshown in Figure 7
To determine the value of current to be shared by eachsource the controller of each source communicates amongthe other sources and informs about the per-unit (pu) cur-rent supplied by itThis information is used by each controllerto determine the total current supplied by all sources whichis given as
119894pu119879 = 119899sum119898=1119894pu119895 (7)
where 119894pu119895 is the pu current of source-j and 119899 is the number ofsourcesThe reference current of each source 119894ref119895 is calculatedas
119894ref119895 = 119896119895119894rated119895 119894pu119879 (8)
where 119896119895 and 119894rated119895 are the load sharing factor and ratedcurrent of source-j respectively
In the architecture shown in Figure 7 the pu currentof each source is shared Hence the data transmitted overthe communication link by each source is 2 bytes and thetotal data transmitted is 2119899 bytes Data read by each source is2(119899minus 1) bytes Hence the technique used for communicationhas to manage small data and thus a low bandwidth commu-nication is feasible So computer area network (CAN) basedcommunication is used for DC microgrids in this paper
6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
+ +
Node-1 Node-2
idc1 idc2
Rd1 Rd2
Vs Vsminus
minus minus minus
+
minus
+
+
Vs1
Rline1 Rline2
Rload Vload Vs2
Figure 4 Thevenin equivalent circuit of a DC microgrid with two sources sharing the same load
Volta
ge
Current
Small droop
Largedroop
load
load
Rd2 + Rline2
Rd1 + Rline1
idc2 idc2 idc1 idc1
Figure 5 Current sharing inaccuracy using droop control [7]
Source current
Sour
ce v
olta
ge
Voltage deviation
0
s
s2
s1
Rd1
Rd2
idc2 idc1
Δ1 Δ2 = 0
Δ1Δ2
Figure 6 Voltage deviationwith a variation in droop resistances [8]
the single central controller distributive control is distributedamong every PE converter In [24] DC bus signaling (DBS)is proposed for distributed control in which DC voltageis used to communicate the decision about the convertersrsquooperation In DBS every entity in the system senses the DCvoltage level for operation and decisions which limits the
sources loads and storage because DC bus voltage cannot beallocated unlimitedly Furthermore some extreme situations(eg overvoltagecurrent and fully chargedunderchargedbattery) are not addressed in DBS In [41] a current sharingline is proposed and distributed in which the average currentis communicated among converters for operation In DCmicrogrids sources are displaced from each other over aregion Thus the current sharing bus needs to be distributedover the region with the power lines This may inject sub-stantial noise which can degrade the system performanceIn [42] a distributive secondary control using power linesignaling (PLS) is presented The major problem in PLS isthat it is has slow communication Further electromagneticcompatibility issues need to be addressed when using it withelectronic devices
In this paper a distributive control for DC microgridsusing low bandwidth communication is proposed and isshown in Figure 7
To determine the value of current to be shared by eachsource the controller of each source communicates amongthe other sources and informs about the per-unit (pu) cur-rent supplied by itThis information is used by each controllerto determine the total current supplied by all sources whichis given as
119894pu119879 = 119899sum119898=1119894pu119895 (7)
where 119894pu119895 is the pu current of source-j and 119899 is the number ofsourcesThe reference current of each source 119894ref119895 is calculatedas
119894ref119895 = 119896119895119894rated119895 119894pu119879 (8)
where 119896119895 and 119894rated119895 are the load sharing factor and ratedcurrent of source-j respectively
In the architecture shown in Figure 7 the pu currentof each source is shared Hence the data transmitted overthe communication link by each source is 2 bytes and thetotal data transmitted is 2119899 bytes Data read by each source is2(119899minus 1) bytes Hence the technique used for communicationhas to manage small data and thus a low bandwidth commu-nication is feasible So computer area network (CAN) basedcommunication is used for DC microgrids in this paper
6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
DC m
icrogrid
Communication
Source-j PEC
SM controller
Rline
Vref
iref
iT
kjijrated
sum ijpu
1ijrated
ijpu
Figure 7 Distributive control architecture
231 Sliding Mode Control Each source in a DC microgridconsists of a PE converter Linear controllers (PI PID andlead-lag) are being used to control the PE converters forthe load sharing problem in DC microgrids [30ndash32] Thesecontrollers require a linearized model of the system whichmakes it difficult for them to show good power sharingperformance and stability in all operating conditions [33ndash35] So an SM controller is alternatively proposed in [36ndash40 43] which ensures stability in all operating conditionsHence in this paper an SM controller technique is proposedfor proportional load sharing and stability of DCmicrogrids
(1) Modeling A generalized DC microgrid architecture isshown in Figure 1 An equivalent model of one source withDC microgrid through DC-to-DC PE converter is shownin Figure 8 The source is modeled as voltage source V119904with current 119894119904 whereas the DC bus of the microgrid ismodeled through capacitor 119862 and its associated connectingline current 119894dc The source and DC microgrid are inter-faced through the DC-to-DC PE converter The differentialequations describing the system dynamics of this model areexpressed as follows
119889119894119889119905 = minusVdc + 119906V119904119871 (9)
where Vdc = Vline + V119866 and119889Vdc119889119905 = 119894 minus 119894dc119862 (10)
where 119894 Vdc Vline V119866 119894dc 119871 and 119862 are inductor current busvoltage (capacitor voltage) connecting line voltage grid volt-age line current inductance and capacitance respectively
whereas 119906 defines the switching state of the MOSFET switchwhich can be expressed as
119906 = 1 switch is ldquoONrdquo
0 switch is ldquoOFFrdquo(11)
(2) Sliding Mode Controller Analysis In sliding mode most ofthe controllers include error of one or multiple states of thesystem in the sliding surface (eg inductor current or capac-itor voltage) [44 45] Furthermore some controllers includeerror and both of the time derivative and the integral of theerror in the sliding surface to stabilize the system [38] Inthis case the sliding surface can be represented as a second-order differential equation for which extensive mathematicalanalysis is required to guarantee system stability Anothersurface is defined in [46] for the improvement in the steady-state error and settling time which includes voltage error andsquare of the capacitor current of the system
This paper proposes an SM controller which is designedto achieve both proportional power sharing and dynamicstability of DC microgrids The sliding surface is selected toensure load sharing and precise voltage regulation Thus it isformed using the bus voltage error current error and integralof the bus voltage errorThisway the SM controller can detectand minimize the voltage and current errors Further theintegral action is included to reduce the steady-state voltageerror The proposed sliding surface Ψ is given in
Ψ = 120572119890V + 120573119890119894 + int 119890V 119889119905 (12)
where
119890V = Vdc minus Vrefdc 119890119894 = 119894 minus 119894ref (13)
whereas 119890V 119890119894 Vrefdc and 119894ref are voltage error current errorreference bus voltage and reference inductor current respec-tively while 120572 and 120573 are parameters of the sliding surfaceFigure 9 shows the block diagram of the SM control system
The derivative of the sliding surface is used to ensure theexistence of SM which is given as
119889Ψ119889119905 = 120572119889Vdc119889119905 + 120573119889119894119889119905 + 119890V (14)
Substituting (9) and (10) into (14) leads to
119889Ψ119889119905 = 120572119862 (119894 minus 119894dc) minus 120573119871 (Vdc minus 119906V119904) + 119890V (15)
For the existence of SM the conditions described in (16)need to be fulfilled [47] which ensures that in steady-statecondition Vdc = Vrefdc and 119894 = 119894ref Hence voltage and currentachieve the desired reference
Ψ = 0119889Ψ119889119905 = 0
(16)
Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
SL
CD
C microgrid
++i
D
Rlineis
Vs
ic idc
minusminus
minus
dc
Figure 8 Equivalent model of one source with a DC microgrid
+
+
+ + +
i
ref
dc
iref
e
ei
int Ψminus
minus
Figure 9 Block diagram of the SM controller
To ensure the existence of SM (ie guaranteeing (16)) thetransversality reachability and equivalent control conditionsmust be guaranteed
(i) Transversality Condition The transversality conditiondescribes the system controllabilityThus this conditionmustbe satisfied to allow the system dynamics to be affected bythe SM controller [47] It ensures that the control variable ispresent in the derivative of sliding surface It can be expressedas
119889119889119906 (119889Ψ119889119905 ) = 0 (17)
Substituting (15) into (17) results in
119889119889119906 (119889Ψ119889119905 ) = 120573119871 (V119904) = 0 (18)
Equation (18) depends on the value of 120573 Section 33determines that the value of 120573 must be positive to guaranteea stable system behavior Moreover V119904 and 119871 are positivequantities Hence (17) will be fulfilled and the transversalitycondition of the system is satisfied
(ii) Reachability Condition The reachability condition des-cribes the systemrsquos ability to reach the sliding surface [47 48]Thus the reachability condition ensures that the system will
always be directed towards the sliding manifold Mathemati-cally it is described in
limΨrarr0minus
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=1 gt 0
limΨrarr0+
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=0 lt 0
(19)
Substituting (15) into (19) it can be expressed as
120572119862 (119894 minus 119894dc) + 120573119871 (V119904 minus Vdc) + 119890V gt 0minus 120572119862 (119894dc minus 119894) minus 120573119871Vdc + 119890V lt 0
(20)
The conditions in (20) must be fulfilled to guarantee thatthe SMwill exist and the systemwill be derived to the desiredoperating condition
(iii) Equivalent Control Condition The equivalent controlcondition defines the local stability of the system and enablesthat system to remain trapped inside the sliding surface [4748] Mathematically the equivalent control condition can beexpressed as in
119889Ψ11988911990510038161003816100381610038161003816100381610038161003816119906=119906eq = 0 997888rarr0 lt 119906eq lt 1
(21)
8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
Substituting 119906 = 119906eq in (15) and equating to zero result inthe following expression
119906eq = VdcV119904minus 120572120573 ( 119871119862)(119894 minus 119894dcV119904
) minus 119871120573V119904 119890V (22)
Fulfilling the reachability condition also verifies theequivalent control condition
(3) Sliding Mode DynamicsThe inequalities in (20) generallydescribe the existence of SM These inequalities do not giveinformation about the selection of the sliding parameters120572 and 120573 This section deals with the selection of slidingparameters based on the desired dynamic behaviorThus thestability of the system is fulfilled For this purpose closedloop dynamics in time domain of the system are achieved byputting sliding surface Ψ = 0 in (12) The dynamics are givenin
119890119894 = 120572120573119890V + 1120573 int 119890V 119889119905 (23)
The closed loop dynamics in Laplace domain are given in
119890119894 (119904)119890V (119904) =1 + 120572119904120573119904 (24)
Formerly the voltage dynamics of the DC bus defined in (10)are imposed by (24) Further to find complete closed loopdynamics of the system (10) can be expressed in Laplacedomain as
119862119904Vdc (119904) = 119894 (119904) + 119894dc (119904) (25)
Finally combining (24) and (25) the complete closedloop dynamics of the DC bus voltage can be expressed as
Vdc (119904) = minus 1205731199041198621205731199042 + 120572119904 + 1 119894dc (119904)+ 1 + 1205721199041198621205731199042 + 120572119904 + 1Vrefdc (119904)+ 1205731199041198621205731199042 + 120572119904 + 1 119894ref (119904)
(26)
It is shown in (26) that closed loop dynamics dependon the perturbation introduced by the DC bus current andthe reference Since the reference is a constant value andthe DC bus current depends on the source and load powerrequirements (26) can be expressed as (27) which is used todesign sliding parameters 120572 and 120573 of the SM controller
Vdc (119904)119894dc (119904) = minus1199041198621199042 + (120572120573) 119904 + 1120573 (27)
Finally it is established in (27) that both sliding param-eters 120572 and 120573 must have a positive value to ensure stableSM dynamics otherwise the system will show an unstablebehavior
(4) Design of Sliding Mode Dynamic Behavior The dynamicsshown in (27) demonstrate that the SM controller will
compensate any perturbation produced in the bus current 119894dc(ie limΨrarrinfin(Vdc(119904)119894dc(119904)) = 0) However large undershootsand overshoots in bus voltage can turn off or destroy theload Therefore the dynamics of the bus voltage should becontrolledThe characteristic polynomial in the denominatorof (27) shows that it is a second-order system of the formgiven in
1199042 + 21205770119904 + 20 = 0 (28)
where 120577 and 0 are the damping ratio and undampednatural frequency respectively Comparing (28) with thedenominator of (27) 120577 and 0 can be calculated as
0 = radic 1120573119862120577 = 1205722radic 1120573119862
(29)
120577 and0 can control the response of the system Two typesof responses are considered in this paper underdamped andcritically damped response The characteristics of these arediscussed below
(i) Underdamped Response In this type the controller enablesthe system response to reach the desired voltage faster Butthis faster response is achieved at the expense of oscillationaround the desired voltage The loads that are sensitive tothe voltage drops but not sensitive to the oscillations aresuitable to be controlled using underdamped response (egmicroprocessors) [49]
(ii) Critically Damped Response In this type the controllerenables the system response to avoid oscillations But theresponse will experience a longer delay reaching the desiredvoltage level The loads that are sensitive to the oscillationbut show tolerance to the voltage drops are suitable to becontrolled through critically damped response (eg variablefrequency drive motors) [50]
An overdamped response is not considered in this paperbecause it does not achieve any improvement over thecritically damped response
(a) Underdamped Response The underdamped time domainresponse of the system presented in (27) is given in (30) forthe values of 120572 and 120573 that will lead to the underdampedresponse The condition to guarantee the underdampedresponse is given in (31) Hence
Vdc (119905) = minusΔ119894dc119862(radic(1205722120573119862)2 minus (1120573119862))119890
((1205722120573119862)119905)
sdot sin(radic( 1205722120573119862)2 minus ( 1120573119862))
(30)
12057224119862 lt 120573 (31)
Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 9
where Δ119894dc represents the step change in the DC bus currentPercentage overshoot for underdamped response is given in
OS = 100119890(minus120577120587radic1minus1205772) (32)
Conversely the damping ratio 120577 for a specific percentageovershoot is given in
120577 = radic ln ( OS100)1205872 + (ln ( OS100))2 (33)
The settling time of the underdamped response is givenin
119879119904 = ln (tolerance fraction)1205770 (34)
Equations (32) to (34) can be used to design the SM controllerfor specific design parameters Finally the constraints in (20)must be satisfied for the existence of the SM Moreover theselected values of 120572 and 120573 must satisfy the constraint in (31)which is the condition for underdamped response
(b) Critically Damped Response Critically damped timedomain response is given in (35) while ensuring that thevalues of 120572 and 120573 will lead to the critically damped responseThe condition for this response is given in (36) Hence
Vdc (119905) = minusΔ119894dc119862 (119905) 119890((1205722120573119862)119905) (35)
120573 = 12057224119862 (36)
Finally the constraints defined in (20) must be satisfied forthe existence of SM Further (36) must be satisfied for thecritically damped response
(5) Sliding Mode Hysteresis Control In an ideal situationthe SM controller will switch the DC-to-DC converter atinfinite frequency with system trajectories moving along thesliding surface when the system enters the SMoperationThiscondition is shown in Figure 10(a) However the practicalswitch of the DC-to-DC converter will experience someswitching imperfections and time delays This will produce adynamic behavior in the locality of the sliding surface whichis identified as chattering as shown in Figure 10(b) [47 48]
If the chattering produced in the sliding surface is leftuncontrolled the converter will start self-oscillating at a highfrequency This behavior of the converter is not desirabledue to the high switching losses Further the exact switchingfrequency in the produced chattering cannot be predictedTherefore the converter design and component selection willturn out to be difficult To solve these issues the control law119906 is redefined as
119906 =
0 = ldquoOFFrdquo when Ψ gt 1198961 = ldquoONrdquo when Ψ lt minus119896unchanged otherwise
(37)
Table 1 DC-to-DC converter parameters
Parameters ValueDesired voltage 48VSwitching frequency 10 kHzInductor 119871 100 120583HCapacitor 119862 4000 120583F
Table 2 Node parameters of DC microgrid
Parameters Node-1 Node-2Desired voltage 48VSource rated power 250W 500WLoad resistance 6Voltage and current regulation required leplusmn5
Table 3 Connecting cable parameters of DC microgrid
Parameters Branch-12 Branch-23Current rating 20ACable resistance 205mΩ 2mΩ
where 119896 is a positive number Usually in SMC a hysteresisband is introduced to tackle the chattering problemWith thisalteration the converter switchwill turn onwhenΨ lt minus119896 andturn off whenΨ gt 119896 In the region minus119896 le Ψ le 119896 the converterswitch remains unchanged and maintains its former stateTherefore introducing a region minus119896 le Ψ le 119896 in which noswitching occurs the switching frequency can be controlledby varying the magnitude of 1198963 Results and Discussion
To examine the load sharing performance among paral-lel connected sources a DC microgrid with two sourcesconnected in a parallel configuration to the load throughconnecting lines is proposed and shown in Figure 11 Thistype of configuration can be easily extendable for moresources andmicrogrids in parallel configurationThis type ofsystem is attractive for remote areas where the national gridcannot be easily extendable due to the high cost associatedwith the installation of new transmission lines Thus a two-source DC microgrid system for load sharing is simulatedusing MATLABSimulink Each source consists of a DC-to-DC converter The parameters of the DC-to-DC converterare selected to support maximum voltage and current levelsequal to 50V and 10A respectively Therefore the convertersupports a maximum power of 500WThe parameters for theDC-to-DC converter are given in Table 1
31 Results Using Droop Control The details of nodes andconnecting lines are given in Tables 2 and 3 respectively Eachsource using droop control is shown in Figure 12
A two-source DC microgrid shown in Figure 11 issimulated using droop control To observe the steady-statebehavior assume that the load is drawing rated current and
10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Mathematical Problems in Engineering
System trajectory
Sliding surface
(a)
System trajectory
Sliding surface
(b)
Figure 10 System trajectory with (a) ideal SM and (b) practical SM
Source-1
Load
Source-2
Node-1 Node-2
i1 i2
Rline1Rline2
idc1 idc2
V1 V2
Figure 11 A two-source DC microgrid
PIPWM
Droop
S
D
L
C
DC m
icrogrid
PI
Rline
Vref
Vi
minus
minus
minusminus
+
+
+
Figure 12 DC-to-DC buck converter using droop control
the steady state is reached For equal load sharing source-1and source-2 are simulated for the same power rating Thusdroop gains 1198771198891 = 1198771198892 = 02Ω are selected for equal loadsharing Node voltage and current by each source are shownin Figure 13
For droop gain 02Ω the steady-state current suppliedby source-1 and source-2 is 29 and 49A respectively asshown in Figure 13 For equal load sharing the desiredcurrent to be supplied by each source is 4A The maximumdeviation observed in the supplied current is 275 Steady-state node voltages at source-1 and source-2 are 474 and468V respectively The deviation observed in node voltagesat no load and full load is 25 These results show thatsmall droop gains ensure decent voltage regulation but theload sharing performance is not acceptable For a large droopgain of 19Ω the current supplied by source-1 and source-2is 38 and 42 A respectively The observed deviation in thesupplied currents is 5 which is acceptable and lower thanin the earlier case But the deviation in node voltages hasincreased to 16 which cannot be acceptable for the loads
47475
48Vo
ltage
(V)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(a) V1
464748
Volta
ge (V
)
022 024 026 028 03 032 034 036 038 0402Time (seconds)
(b) V2
022 024 026 028 03 032 034 036 038 0402Time (seconds)
234
Curr
ent (
A)
(c) idc1
022 024 026 028 03 032 034 036 038 0402Time (seconds)
3456
Curr
ent (
A)
(d) idc2
Figure 13 Node voltages and source currents with droop gain 02Ω
32 Results Using SlidingMode Control Figure 14 shows eachsource with distributed control using the SM controller Thepu value of each source current is communicated to theother sources every 10ms The total communication delay isaround 01ms
To observe the steady-state behavior with distributedarchitecture using SM controller the two-source DC micro-grid shown in Figure 11 is simulated and the results are shownin Figure 15The current supplied by source-1 and source-2 is
Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 11
minus
+
S
D
L
C
DC m
icrogrid
+
Communication
+minus
+
+
Hysteresis
Vs minus+
Rline
int
ei
iref
kirated
iT
sum i
e
Vref
1iLN>
ipu
Figure 14 DC-to-DC buck converter with a distributed architecture using SM controller
391 and 392A respectively The observed deviation in thesupplied currents is 208 which is a significantly low valuecompared to the droop controlledDCmicrogrid Further thenode voltages at source-1 and source-2 are 4778 and 47Vrespectively The deviation observed in the node voltagesis 225 This confirms the steady-state load sharing andvoltage regulation performance of the proposed distributedSM controller
Further Figure 16 shows that source-1 is sharing 25 andsource-2 is sharing 75 of the rated load currentThe currentdeviation observed is 41 which shows the effectivenessof the proposed architecture using the SM controller Inaddition simulations are carried out to see the effect ofconnecting line resistance and the results are summarized inTable 4 Each column represents the fixed value of connectingline resistance of source-1 119877line1 and each row represents thefixed value of connecting line resistance of source-2 119877line2Each entity in Table 4 represents voltage and current sharingdeviation It can be observed that connecting line resistanceaffects the load sharing between sources
To observe the transient condition a step load of 3Ω isapplied at 05 s when the system is operating in steady stateat the rated load as shown in Figure 17 At the instant whena step change in load is applied node voltages drop shortlyas shown in Figure 17 However within 25ms node voltagesof source-1 and source-2 settle down to 4929 and 4683VrespectivelyThis corresponds to a voltage deviation of 268
The currents supplied are 1196 and 1145A The deviation inthe supplied currents is 45
Furthermore the dynamic behavior of node voltage isinvestigated for underdamped and critically damped res-ponses The sliding parameters 120572 and 120573 are selected positiveaccording to the conditions defined in (31) and (36) Thevalues of 120572 and 120573 are listed in Table 5 Figure 18 shows nodevoltage when the load resistance is changed from 6 to 3Ωat 05 s with sliding parameters that show underdamped andcritically damped responses The results of settling time aresummarized in Table 5 It can be observed that as the valueof 120577 is increased from 01 to 06 the underdamped responseis improved with smaller settling time This response is ingood agreement with the presented theory Additionallyfor 120577 = 1 the response is critically damped with furtherimproved settling time as presented in theory These resultsshow the good dynamic performance of the SM controllerwith distributed architecture
33 Fail-Safe Performance of Distributed Control ArchitectureA significant improvement in the distributed architecture isthat it provides high reliability To prove this claim a three-sourceDCmicrogrid shown in Figure 19 is simulated for faultcondition and shown in Figure 20 The parameters of eachsource are the same as given in Table 1 Source-1 and source-2are connected to the load through connecting line resistancesBut source-3 is directly connected to the load At steady state
12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

12 Mathematical Problems in Engineering
47475
48
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(a) V1
464748
Volta
ge (V
)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(b) V2
3638
442
Curr
ent (
A)
041 042 043 044 045 046 047 048 049 0504Time (seconds)
(c) idc1
3638
442
Curr
ent (
A)
04 042 043 044 045 046 047 048 049 05041Time (seconds)
(d) idc2
Figure 15 Node voltages and source currents with a distributedarchitecture using SM controller
04 042 044 046 048 05 052 054 056 058 06Time (seconds)
18185
19195
2
Curr
ent (
A)
(a) idc1
59595
6605
Curr
ent (
A)
042 044 046 048 05 052 054 056 058 0604Time (seconds)
(b) idc2
Figure 16 Source 1 with 25 and source 2 with 75 load sharing ofthe rated load
the voltage across the load is 4704VThe three sources supply3915 391 and 393A The maximum deviation observed inthe supplied currents is 225
If one source becomes faulty the capacity of the othertwo sources is enough to satisfy the load Failure of source-2 is simulated by removing its power supply at 05 s Underthis fault the voltage across loads and the supplied currentsby sources are shown in Figure 20 After this fault thesystem reaches the steady state in about 25ms The voltageacross loads is maintained at 4735V The supplied current
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(a) V1
05
10
Curr
ent (
A)
045 05 055 06 065 07 075 0804Time (seconds)
(b) idc1
404550
Volta
ge (V
)
045 05 055 06 065 07 075 0804Time (seconds)
(c) V2
05
10Cu
rren
t (A
)
045 05 055 06 065 07 075 0804Time (seconds)
(d) idc2
Figure 17 Transient response when a step load of 3Ω is applied at05 seconds
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(a) Underdamped response (damping ratio = 01)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(b) Underdamped response (damping ratio = 03)
464748
Volta
ge (V
)
05 055 06045Time (seconds)
(c) Underdamped response (damping ratio = 06)
464748
Volta
ge (V
)
045 055 0605Time (seconds)
(d) Critically damped response (damping ratio = 1)
Figure 18 Voltage response of a source when load resistance ischanged from 6 to 3Ω at 05 seconds
Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 13
Source-1
Load
Source-2
Node-1 Node-2
Source-3
Node-3
i1
i3
i2idc1 idc2
idc3
V2V1
V3
Rline1 Rline2
Figure 19 A three-source DC microgrid
Table 4 Connecting cable parameters of DC microgrid
119877line1 = 05 times 205mΩ 119877line1 = 1 times 205mΩ 119877line1 = 2 times 205mΩ119877line2 = 05 times 2mΩ 192 VV 19 AA 205 VV 224 AA 226 VV 252 AA119877line2 = 1 times 2mΩ 195 VV 1925 AA 208 VV 225 AA 227 VV 1875 AA119877line2 = 2 times 2mΩ 199 VV 195 AA 212 VV 275 AA 227 VV 1925 AA
464748
Volta
ge (V
)
045 05 055 06 065 0704Time (seconds)
(a) Vload
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(b) idc1
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(c) idc2
05
10
Curr
ent (
A)
045 05 055 06 065 0704Time (seconds)
(d) idc3
Figure 20 Transient response during fault on source-2 at 05seconds
by source-1 and source-3 is 591 and 593A respectivelyThis corresponds to 15 deviation in the supplied currentThis confirms the performance of the distributed architectureusing SM controller during source failure To show the effectof chattering produced the sliding surface of a source issimulated and shown in Figure 21 Figure 21(a) shows the
minus200
minus100
0
100
200
Slid
ing
surfa
ce
03998 039985 03999 039995 04039975Time (seconds)
(a) Chattering
002040608
1
Con
trol l
aw
03998 039985 03999 039995 04039975Time (seconds)
(b) Control law
Figure 21 Sliding surface with chattering and control law
produced chattering which is controlled using a hysteresisband as defined in (37)The value of 119896 is selected as 100 basedon the criteria reported in [51] Figure 21(b) shows the controlsignal which is used to operate the converter switch
34 Problems in Distributive Sliding Mode Application Thedelays in the communication channel will directly affectthe transient behavior of the system while the steady-stateresponse is not affected by the communication delays Fur-ther the SM controller is realized through analog integratedcircuits The following are some design issues in analogimplementation
14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

14 Mathematical Problems in Engineering
Table 5 Voltage dynamic behavior for different values of 120577Dampingratio 120577
Slidingparameter(120572 120573)
Settlingtime Response type
120577 = 01 (028 100) 005 s Underdamped(50ms)
120577 = 03 (085 100) 004 s Underdamped(40ms)
120577 = 06 (17 100) 003 s Underdamped(30ms)
120577 = 1 (285 100) 002 s Criticallydamped(20ms)
(i) Selecting the variables is a serious concern becauseselectingmore variables results inmore computationsand sensing required which will increase the com-plexity of the system
(ii) Selecting the integral and derivative of the variablesinvolves noise sensitivity These variables are desiredto be indirectly controlled for example 119889119881119888119889119905 can beachieved through sensing capacitor current
(iii) The produced chattering is a big challenge in SMIt produces excessive switching losses and limits theselection of the switching device
(iv) Restrictions of the analog components (eg slew ratebandwidth and saturation limits) need to be carefullyconsidered for the proper control operation
4 Conclusion
Adistributed architecture using an SM controller is proposedfor proportional load sharing and stability of DCmicrogridsDC microgrids are a reliable method to provide efficientpower to the consumer in the presence of renewable sourcesDroop controllers which are local controllers can achievegood load sharing at the cost of voltage regulation Furthervoltages at different nodes of the DC microgrid are not thesame So it is difficult to achieve load sharing when the con-necting line resistances among the sources are considerableA centralized controller can achieve these objectives using ahigh speed communication link However it loses reliabilitydue to the single point failure Additionally these controllersare realized through proportional integral (PI) controllerswhich cannot ensure load sharing and stability in all oper-ating conditions To address limitations a distributed archi-tecture using an SM controller utilizing low bandwidth com-munication is proposed for DC microgrids in this paper Asystemmodel is developed and its transversality reachabilityand equivalent control condition are verified Furthermorethe dynamic behavior of the modeled system is investigatedfor underdamped and critically damped responses Detailedsimulation results showed good performance of the proposedcontroller
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] K-TMokM-HWang S-C Tan and S Y RHui ldquoDC electricspringsmdasha technology for stabilizing DC power distributionsystemsrdquo IEEE Transactions on Power Electronics vol 32 no 2pp 1088ndash1105 2017
[2] K A Saleh A Hooshyar and E F El-Saadany ldquoHybrid passive-overcurrent relay for detection of faults in low-voltage DCgridsrdquo IEEE Transactions on Smart Grid vol 8 no 3 pp 1129ndash1138 2017
[3] LMeng Q Shafiee G Ferrari Trecate et al ldquoReview on controlof DCmicrogridsrdquo IEEE Journal of Emerging and Selected Topicsin Power Electronics vol 99 1 page 2017
[4] X Li L Guo S Zhang et al ldquoObserver-basedDC voltage droopand current feed-forward control of a DC microgridrdquo IEEETransactions on Smart Grid vol 99 1 page 2017
[5] T V Vu S Paran F Diaz-Franco T El-Mezyani and C SEdrington ldquoAn alternative distributed control architecture forimprovement in the transient response of DCmicrogridsrdquo IEEETransactions on Industrial Electronics vol 64 no 1 pp 574ndash5842017
[6] T Dragicevic X Lu J C Vasquez and J M Guerrero ldquoDCmicrogridsmdashpart I a review of control strategies and stabiliza-tion techniquesrdquo IEEETransactions on Power Electronics vol 31no 7 pp 4876ndash4891 2016
[7] S Anand B G Fernandes and J M Guerrero ldquoDistributedcontrol to ensure proportional load sharing and improve voltageregulation in low-voltageDCmicrogridsrdquo IEEE Transactions onPower Electronics vol 28 no 4 pp 1900ndash1913 2013
[8] M Rashad M Ashraf A I Bhatti D M Minhas and B AAhmed ldquoMathematical modeling and stability analysis of DCmicrogrid using sm hysteresis controllerrdquo International Journalof Electrical Power amp Energy Systems vol 95 pp 507ndash522 2018(Arabic)
[9] A Esmaeli ldquoStability analysis and control of microgrids bysliding mode controlrdquo International Journal of Electrical Poweramp Energy Systems vol 78 pp 22ndash28 2016
[10] P Wang X Lu X Yang W Wang and D Xu ldquoAn improveddistributed secondary control method for DC microgrids withenhanced dynamic current sharing performancerdquo IEEE Trans-actions on Power Electronics vol 31 no 9 pp 6658ndash6673 2016
[11] S D Tavakoli M Mahdavyfakhr M Hamzeh K Sheshyekaniand E Afjei ldquoA unified control strategy for power sharingand voltage balancing in bipolar DC microgridsrdquo SustainableEnergy Grids and Networks vol 11 pp 58ndash68 2017
[12] S Peyghami HMokhtari P C Loh P Davari and F BlaabjergldquoDistributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC charac-teristicsrdquo IEEE Transactions on Smart Grid vol 99 p 1 2016
[13] S Peyghami P Davari H Mokhtari P C Loh and F Blaab-jerg ldquoSynchronverter-enabled DC power sharing approach forLVDCmicrogridsrdquo IEEE Transactions on Power Electronics vol32 no 10 pp 8089ndash8099 2017
[14] Shivam and R Dahiya ldquoRobust decentralized control for effec-tive load sharing and bus voltage regulation of DC microgridbased on optimal droop parametersrdquo Journal of Renewable andSustainable Energy vol 9 no 4 p 045301 2017
Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 15
[15] Z Liu Y Luo R Zhuo and X Jin ldquoDistributed reinforcementlearning to coordinate current sharing and voltage restorationfor islanded DC microgridrdquo Journal of Modern Power Systemsand Clean Energy pp 1ndash11 2017
[16] S Peyghami H Mokhtari and F Blaabjerg ldquoHierarchi-cal power sharing control in DC microgridsrdquo in MicrogridAdvanced Control Methods and Renewable Energy System Inte-gration vol 3 pp 63ndash100 Elsevier 1 edition 2016
[17] C Jin P Wang J Xiao Y Tang and F H Choo ldquoImplementa-tion of hierarchical control in DC microgridsrdquo IEEE Transac-tions on Industrial Electronics vol 61 no 8 pp 4032ndash4042 2014
[18] X Liu PWang and P C Loh ldquoA hybrid ACDCmicrogrid andits coordination controlrdquo IEEE Transactions on Smart Grid vol2 no 2 pp 278ndash286 2011
[19] J M Guerrero J C Vasquez J Matas L G de Vicuna and MCastilla ldquoHierarchical control of droop-controlled AC and DCmicrogrids a general approach toward standardizationrdquo IEEETransactions on Industrial Electronics vol 58 no 1 pp 158ndash1722011
[20] X Lu J M Guerrero K Sun J C Vasquez R Teodorescu andL Huang ldquoHierarchical control of parallel AC-DC converterinterfaces for hybrid microgridsrdquo IEEE Transactions on SmartGrid vol 5 no 2 pp 683ndash692 2014
[21] J He and Y W Li ldquoAn enhanced microgrid load demand shar-ing strategyrdquo IEEE Transactions on Power Electronics vol 27 no9 pp 3984ndash3995 2012
[22] J M Guerrero M Chandorkar T-L Lee and P CLoh ldquoAdvanced control architectures for intelligentmicrogridsmdashpart I decentralized and hierarchical controlrdquoIEEE Transactions on Industrial Electronics vol 60 no 4 pp1254ndash1262 2013
[23] H Liang B J ChoiWZhuang andX Shen ldquoStability enhance-ment of decentralized inverter control through wireless com-munications in microgridsrdquo IEEE Transactions on Smart Gridvol 4 no 1 pp 321ndash331 2013
[24] J Schonberger R Duke and S D Round ldquoDC-bus signalinga distributed control strategy for a hybrid renewable nanogridrdquoIEEE Transactions on Industrial Electronics vol 53 no 5 pp1453ndash1460 2006
[25] M C Chandorkar D M Divan and R Adapa ldquoControl ofparallel connected inverters in standalone AC supply systemsrdquoIEEE Transactions on Industry Applications vol 29 no 1 pp136ndash143 1993
[26] S V Iyer M N Belur and M C Chandorkar ldquoA generalizedcomputationalmethod to determine stability of amulti-invertermicrogridrdquo IEEE Transactions on Power Electronics vol 25 no9 pp 2420ndash2432 2010
[27] J M Guerrero J Matas L G De Vicuna M Castilla and JMiret ldquoWireless-control strategy for parallel operation of dis-tributed-generation invertersrdquo IEEE Transactions on IndustrialElectronics vol 53 no 5 pp 1461ndash1470 2006
[28] H J Avelar W A Parreira J B Vieira Jr L C G De Freitasand E A A Coelho ldquoA state equation model of a single-phasegrid-connected inverter using a droop control scheme withextra phase shift control actionrdquo IEEETransactions on IndustrialElectronics vol 59 no 3 pp 1527ndash1537 2012
[29] W Yao M Chen J Matas J M Guerrero and Z-M QianldquoDesign and analysis of the droop control method for parallelinverters considering the impact of the complex impedance onthe power sharingrdquo IEEE Transactions on Industrial Electronicsvol 58 no 2 pp 576ndash588 2011
[30] P Karlsson and J Svensson ldquoDC bus voltage control for a dis-tributed power systemrdquo IEEE Transactions on Power Electronicsvol 18 no 6 pp 1405ndash1412 2003
[31] M Mahmoodi G B Gharehpetian M Abedi and R Norooz-ian ldquoControl systems for independent operation of parallelDG units in DC distribution systemsrdquo in Proceedings of the 1stInternational Power and Energy Conference PECon pp 220ndash224 28-29 Nov 2006
[32] M Mahmoodi G B Gharehpetian M Abedi and RNoroozian ldquoA suitable control strategy for source convertersand a Novel Load- Generation Voltage Control scheme for DCvoltage determination in DC distribution systemsrdquo in Proceed-ings of the 1st International Power and Energy ConferencePECon pp 363ndash367 Malaysia November 2006
[33] H-H Park and G-H Cho ldquoA DC-DC converter for a fullyintegrated PID compensator with a single capacitorrdquo IEEETransactions on Circuits and Systems II Express Briefs vol 61no 8 pp 629ndash633 2014
[34] M M Peretz and S Ben-Yaakov ldquoTime-domain design ofdigital compensators for PWM DC-DC convertersrdquo IEEETransactions on Power Electronics vol 27 no 1 pp 284ndash2932012
[35] A KwasinskiAmicrogrid architecture with multiple-input dcdcconverters applications reliability system operation and controlUniv Illinois Urbana-Champaign Urbana Ill USA 2007
[36] S Singh D Fulwani and V Kumar ldquoRobust sliding-modecontrol of dcdc boost converter feeding a constant power loadrdquoIET Power Electronics vol 8 no 7 pp 1230ndash1237 2015
[37] S I Serna-Garces D G Montoya and C A Ramos-Paja ldquoSlid-ing-mode control of a chargerdischarger DCDC converter forDC-bus regulation in renewable power systemsrdquo Energies vol9 no 4 article no 245 2016
[38] S I Serna-Garces R E Jimenez and C A Ramos-Paja ldquoSlid-ing-mode control of a DcDc postfilter for ripple reduction andefficiency improvement in POL applicationsrdquo Journal of AppliedMathematics vol 2013 Article ID 915146 10 pages 2013
[39] N Vazquez Y Azaf I Cervantes E Vazquez and CHernandez ldquoMaximum power point tracking based on slidingmode controlrdquo International Journal of Photoenergy vol 2015Article ID 380684 8 pages 2015
[40] J Cabiles-Magsino R C Guevara and M Escoto ldquoImple-mentation of sliding mode control for current sharing in fixedfrequency voltage regulator modulesrdquo in Proceedings of theIEEE Region 10 Conference Sustainable Development ThroughHumanitarian Technology TENCON 2012 Philippines Novem-ber 2012
[41] WQiu and Z Liang ldquoPractical design considerations of currentsharing control for parallel VRM applicationsrdquo in Proceedings ofthe 20th Annual IEEEApplied Power ElectronicsConference andExposition APEC pp 281ndash286 USA March 2005
[42] T Dragicevic J M Guerrero and J C Vasquez ldquoA distributedcontrol strategy for coordination of an autonomous LVDCmicrogrid based on power-line signalingrdquo IEEE Transactions onIndustrial Electronics vol 61 no 7 pp 3313ndash3326 2014
[43] H Valderrama-Blavi J M Bosque F Guinjoan L Marroyoand L Martınez-Salamero ldquoPower adaptor device for domesticDC microgrids based on commercial MPPT invertersrdquo IEEETransactions on Industrial Electronics vol 60 no 3 pp 1191ndash1203 2013
[44] R Silva-Ortigoza V Hernandez-Guzman M Antonio-Cruzand D Munoz-Carrillo ldquoDCDC Buck power converter as a
16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

16 Mathematical Problems in Engineering
smooth starter for a DCmotor based on a hierarchical controlrdquoIEEE Transactions on Power Electronics vol 30 no 2 pp 1076ndash1084 2015
[45] Y Zhao W Qiao and D Ha ldquoA sliding-mode duty-ratio con-troller for DCDC buck converters with constant power loadsrdquoIEEE Transactions on Industry Applications vol 50 no 2 pp1448ndash1458 2014
[46] K K S Leung and H S H Chung ldquoDerivation of a second-order switching surface in the boundary control of buck con-vertersrdquo IEEE Power Electronics Letters vol 2 no 2 pp 63ndash672004
[47] V Utkin J Guldner and J Shi Sliding Mode Control in Electro-mechanical Systems Taylor and Francis London UK 1999
[48] J J E Slotine and W Li Sliding control in Applied Non-linearControl Prentice-Hall Inc Englewood Cliffs NJ USA 1991
[49] Intel Voltage Regulator Module (VRM) and Enterprise VoltageRegulator-Down (EVRD) 111mdashDesign Guidelines Intel Cor-poration Santa Clara CA USA 2009
[50] T Wildi Electrical Machines Drives and Power Systems Pren-tice Hall Columbus OH USA 6 edition 2006 ElectricalMachines Drives and Power Systems
[51] B Shrestha N R Bhuyan and BN Sinha SlidingMode Controlof Switching Power Converters Technique and Implementationvol 4 CRC press Taylor amp Francis Group Boca Raton NYUSA 1st edition 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom




![FREQUENCY-BASED ENERGY MANAGEMENT IN ISLANDED MICROGRID · 2018. 3. 28. · proportional-resonant (PR) [7]. Dan Wu1, Fen Tang, Josep M. Guerrero, and Juan C. Vasquez proposed a microgrid,](https://img.pdfslide.us/doc/110x75/604b24bdd7ce3d482f165b7d/frequency-based-energy-management-in-islanded-microgrid-2018-3-28-proportional-resonant.jpg)
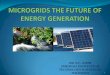




![Some Aspects of Stability in Microgridsstatic.tongtianta.site/paper_pdf/e8ac61b4-bb53-11e9-84e9-00163e08bb86.pdfformulation for the transient stability analysis in a microgrid is proposedin[19],](https://img.pdfslide.us/doc/110x75/5e4ee95665fd3f4f365d2293/some-aspects-of-stability-in-formulation-for-the-transient-stability-analysis-in.jpg)


![Matrix Measure Strategies for Stability of Cellular Neural Networks with Proportional ... · 2016. 8. 26. · multiple proportional delays, Zhou [29] analyzed the global asymptotic](https://img.pdfslide.us/doc/110x75/60df31e825a2970760154461/matrix-measure-strategies-for-stability-of-cellular-neural-networks-with-proportional.jpg)