Embed Size (px)
Citation preview

WMI
Technische
Universitat
Munchen
Walther -Meißner -
Institut fur Tief -
Temperaturforschung
Bayerische
Akademie der
Wissenschaften
Programmable control of
two non-linear resonators
Bachelor Thesis
Stefanie Grotowski
Supervisor: Dr. Frank Deppe
Munich, March 2019
Faculty of Physics
Technical University of Munich


Contents
1 Introduction 2
2 Flux-tunable resonators 4
2.1 Coplanar transmission line resonators . . . . . . . . . . . . . . . . . . 4
2.2 Superconducting quantum interference devices . . . . . . . . . . . . . 6
2.3 Tunable resonators . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.1 Mode function of a single resonator . . . . . . . . . . . . . . . 9
2.3.2 Coupled resonators . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Experimental techniques 14
3.1 Sample . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Experimental setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.3 Resonator control program . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Results 20
4.1 Automatic setting of currents for the resonance frequency . . . . . . . 20
4.2 Comparison of simulations and measurements . . . . . . . . . . . . . 22
4.2.1 Adjustment of current-to-flux conversion relation . . . . . . . 22
4.2.2 Unstable behavior of resonator 2 . . . . . . . . . . . . . . . . 28
4.2.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 Summary and Outlook 32
A Extract of the calculation results 34
II


Chapter 1
Introduction
In 2012, the Nobel prize was awarded to D. Wineland and S. Haroche for three
decades of ground breaking work on the manipulation and measurement of individ-
ual quantum systems [1]. Nowadays, the community works on systems with several
tens of quantum elements. These e↵orts are mainly motivated by two grand goals:
universal quantum computing [2] and quantum simulation [3]. The latter was orig-
inally introduced in 1982, by Feynman who suggested to use quantum mechanics
itself rather than classical physics to e�ciently solve quantum mechanical problems
[4]. Since then, the interest in quantum simulation has grown rapidly because many
di�cult problems in physics, such as the understanding of many-body systems [5]
or the investigation of quantum phase transitions [6], could be studied by means
of su�ciently large quantum simulators. Among the di↵erent approaches pursued
towards quantum simulation, the most relevant ones are based on superconducting
quantum circuits [7, 8], ultra cold atoms [9, 10] and trapped ions [11, 12].
This thesis reports on an experimental study with superconducting circuits. In par-
ticular, we work towards a quantum simulator for Bose-Hubbard networks [13, 14]
in a bottom up-approach. Each network site is composed of a microwave resonator
galvaincally coupled to a flux-tunable Josephson nonlinearity. In this way, one min-
imizes the complexity and the amount of control needed to manipulate the sys-
tem [14]. Furthermore, superconducting chips are mostly fabricated with optical or
electron-beam lithography, thus they are very flexible in design and geometry [15].
Additionally, they have a good scalability and a direct control of the parameters
is possible. Especially when dealing with large systems, there is a great di�culty
in controlling the system, which is why at first, a simple system with few compo-
nents has to be understood before increasing the size of it. Thereupon the gained
knowledge can be applied to larger systems.
2

The ambition of this work is to gain control over a system of two coupled nonlinear
superconducting resonators. The Josephson nonlinearity of each resonator can be
controlled by means of a superconducting coil and an on-chip flux antenna. The
central issue is to set the two resonance frequencies automatically to their desired
values. Since coil and antenna always influence both resonators simultaneously, the
cross talk needs to be considered and modelled. Afterwards, this calibration is to
be verified by the successful setting of predefined frequencies.
The thesis is structured as described in the following. In chapter 2, the required
theoretical background is presented, as well as the components which are used in the
superconducting circuit. The next section (chapter 3) gives information about the
experiment itself, including the sample, the experimental conditions and the calcu-
lation of the current values required to tune the resonance frequency. In chapter 4,
the results of the experiment are presented and discussed. The first part is about
the evaluation of the calculation and the second about the measurements from the
experiment. Finally, a summary and conclusions can be found in chapter 5. Fur-
thermore, an outlook gives information about options for further experiments and
ideas of improvement.
3

Chapter 2
Flux-tunable resonators
In this chapter, the required fundamentals of circuit quantum electrodynamics (QED)
are explained. An overview on commonly used components in quantum circuits
such as waveguides, resonators and SQUIDs is given. Also, flux-tunable nonlin-
ear supercondcuting resonators are described. Besides, this section focuses on the
mathematical description of the tunability of this system.
2.1 Coplanar transmission line resonators
Generally, a transmission line is a structure formed of two or more parallel conduc-
tors, whose ends are connected either to a source or to a load. In superconducting
waveguides, electrical energy can be guided nearly lossless. The TEM mode, where
the electric and magnetic field components are perpendicular to the direction of
propagation, is the dominating mode for lines embedded in a homogeneous medium.
The ’coplanar waveguide’ (CPW) is a planar realization of a transmission line, in-
vented by Cheng P. Wen in 1969 at the RCA’s Sarno↵ Laboratories [16]. Unlike
other planar transmission lines, all conductors are placed on one side of the dielectric
substrate [17]. A thin metallic film is placed on a dielectric substrate forming two
ground planes and a center strip in between, separated by two narrow gaps. Since
the lines are surrounded by an inhomogeneous medium (air and dielectric substrate),
the CPW propagates quasi-TEM modes. The existing longitudinal components of
the electric and magnetic field in this mode are small enough to be neglected. A
cross-section of a CPW structure is presented in Fig. 2.1.
CPW structures segments with a capacitor at each end are called half-wavelength
’coplanar transmission line resonators’. These structures are often used in quantum
information processing and quantum optical experiments. They can detect radia-
tion in the optical range or higher [18], read out the quantum state of a qubit [19]
4

Figure 2.1: Cross-section view of a CPW structre. Two ground planes and a centerstrip out of a thin layer of metallic film (blue) are placed on a dielectricsubstate (gray). The distance between the center conductor and theground planes on each side is given by the width w.
or be used as magnetic field tunable resonators [20]. For small coupling strenghts
to the external feed lines, gap capacitors with a width of 10 µm to 50 µm are used,
whereas for larger coupling strengths finger capacitors with one or more pairs of fin-
gers are realized. Resonators are fabricated in optical or electron beam lithography
processes, thus they are very flexible in geometry and design. For instance, they
can be bent and their length is variable. Additionally, larger systems and networks
can be created because a high scalability is given and the resonators can be simply
attached to each other. Usually, the resonance frequency lies in a range of a few
gigahertz and is defined by the resonator length l, which is why this quality can
be well controlled during the fabrication process. In half-wavelength resonators, the
fundamental resonator mode corresponds to half the length of the resonator l = �/2.
When replacing a capacitor by a short circuit, the length l = �/4 determines the
fundamental mode and the circuit is called quarter-wavelength resonator. Since only
the boundary conditions are fixed, higher harmonics at integer (half-wavelength res-
onator) or odd integer (quarter-wavelength resonator) multiples of the fundamental
frequency are possible [21]. Further characteristics of CPW resonators are the in-
ductance L0 and capacitance C0 per unit length, which depend on the geometry
of the resonator. Equation (2.1) and Eq. (2.2) show the relation with the phase
velocity ⌫ph of the electromagnetic wave propagating through the resonator and the
characteristic impedance Z0.
⌫ph =1pC0L0
(2.1)
Z0 =p
L0/C0 (2.2)
5

2.2 Superconducting quantum interference devices
When dealing with superconducting circuits, the Josephson e↵ect is of great practi-
cal importance. A phenomenological understanding can be obtained by describing
the supercurrent as a macroscopic wave function with an amplitude representing
the square of the number of superelectrons (’Cooper pairs’) and a phase. The
Josephson e↵ect describes that a supercurrent can tunnel through a thin layer of
insulating material between two superconducting electrodes. Such a structure is
called a Josephson junction and is shown in Fig. 2.2 (a). The supercurrent across
a Josephson junction depends on the gauge-invariant phase di↵erence ' between
the macroscopic wave functions in the two electrodes. The current depends in a
nonlinear fashion on the phase di↵erence ' [22, 23].
Is = Ic sin(') (2.3)
This current-phase relation in Eq. (2.3) is also known as the first Josephson relation,
where Ic describes the maximum supercurrent through the junction. Furthermore,
Josephson junctions have an intrinsic shunt capacitance CJ and the supercurrent
branch can be interpreted as a nonlinear inductance [see Fig. 2.2 (b)] which is given
by
LJ =�0
2⇡Is. (2.4)
A dc-supercondcuting quantum interference device (SQUID) consists of two Joseph-
son junctions connected in parallel [23] and is shown schematically in Fig. 2.3.
Is(�) = 2Ic
����cos(⇡�
�0)
���� (2.5)
The maximum supercurrent Is through this parallel circuit is dependent on the
external flux � through the SQUID loop. Here, we assume that both junctions have
identical critical currents and the expression �0 denotes the flux quantum. Note,
that this relation is only valid for negligible inductance of the superconducting loop
formed by the junction electrodes, a condition well fulfilled throughout this work.
6

(a) Schematic view of a Josephson junction.The two superconductors (gray) are sep-arated by a thin layer of an insulatingmaterial (red).
(b) Circuit representa-tion of a Josephsonjunction by a Joseph-son inductance LJ
and an intrinsicshunt capacitanceCJ.
Figure 2.2: Schematic view and circuit representation of a Josephson junction.
Moreover, for an asymmetric SQUID with two di↵erent cirtical currents Ic1 and Ic2
for each junction, Eq. (2.3) has to be adjusted with an asymmetry parameter d.
d =Ic1 � Ic2Ic1 + Ic2
(2.6)
In this scenario, one obtains
Is(�) = 2Ic
����cos✓⇡�
�0
◆����
s
1 + d2 tan2
✓⇡�
�0
◆. (2.7)
The advantage of a SQUID over of a single Joesphson junction is that the critical
current can be controlled by changing the flux through the superconducting loop.
If the flux has the value of multiples of the flux quantum � = n · �0, the critical
current Is reaches its maximum as is displayed in Fig. 2.4.
7

Figure 2.3: Schematic view of a SQUID. The Josephson junctions are marked inred and the maximum current through the junction is given by Ic1 andIc2, respectively. The current Is through the junction can be varied bychanging the magnetic flux � through the SQUID loop.
-4 -2 0 2 4
0.0
0.5
1.0
1.5
2.0
Figure 2.4: Dependence of the maximum supercurrent Is of a dc-SQUID on themagentic flux �. It reaches its maximum at fluxes which correspond tomultiples of the magnetic flux quantum � = n · �0.
8

2.3 Tunable resonators
By placing a SQUID in the center of a coplanar transmission line resonator, a field-
controllable nonlinear tunable resonator can be fabricated. The integration of the
Josephson junction results in an unequal spacing of the energy levels, because it acts
as a nonlinear inductance [24]. A schematic representation of a tunable resonator
is shown in Fig. 2.5. In the following, the wave function and the ability to tune the
resonance frequency are examined in more detail.
Figure 2.5: Schematic view of a CPW tunable resonator of length l. There are fingercapacitors at both ends of the CPW structure and a SQUID placed inthe center of the transmission line. The white part is the conductorformed out of aluminium and the gray part is the silicon substrate.Red crosses indicate the Josephson junctions. The SQUID acts as atunable inductance, which, in turn, makes the resonator tunable in itsresonance frequency. Because of the nonlinear nature of the Josephsoninductance, the SQUID also introduces a tunable nonlinearity.
2.3.1 Mode function of a single resonator
The mode functions can be determined by solving the linearized Euler-Lagrange
equations and using a separation ansatz
(x, t) =X
m
(m)(t) u(m)(x). (2.8)
The traveling mode function (x, t) can be split into an only time dependent part
(m)(t), which describes the oscillation at a frequency ! = k ·⌫, and an only position
dependent part u(m)(x) [25]. The boundary conditions force the currents to be equal
on both sides of the junction and to be zero at the ends of the transmission line
which leads to the following di↵erential equation
1
L0@x (x, t) = CJ� +
�
LJ, (2.9)
9

where � denotes the phase bias of the junctions. One ends up with two resonator
mode functions, one describing each side of the junction.
u(m)l (x) = Al cos
✓k(m)(x+
l
2)
◆(2.10)
u(m)r (x) = Ar cos
✓k(m)(x� l
2)
◆(2.11)
Index l describes the CPW section on the left side of the junction, whereas index r
represents the right part. The normalization coe�cients can be chosen in two dif-
ferent ways. The choice Al = Ar corresponds to the so called even or symmetric
mode, whereas Al = �Ar to an odd or asymmetric mode.
kodd tan
✓kodd +
l
2
◆=
2Z0
⌫CJ(!
2p � (kodd⌫)2) (2.12)
By inserting the functions in Eq. (2.9) one obtains an implicit equation for the wave
vector k. CJ is the shunt capacity, LJ the e↵ective inductance [see Eq. (2.4)] and
!p is denoted as the plasma frequency which is given by the following equation
!p =1pCJLJ
. (2.13)
When plotting the first three mode functions (see Fig. 2.6), we see that the SQUID
only a↵ects the odd modes of the resonator. The symmetric mode is una↵ected
because there is no flux drop at the junction, therefore no current is flowing [26].
Consequently, in the following, only the odd modes are considered. For these, at
the position of the junction, a flux-dependent di↵erence of the amplitude occurs.
The size of the jump can be interpreted as a change of the e↵ective length of the
resonator, leading to a tunability of the resonance frequency. Depending on the type
and design, a resonator can be tuned in a range of a hundred megahertz to a few
gigahertz.
2.3.2 Coupled resonators
Now two resonators are placed in a series with capacitive coupling as shown in
Fig. 2.7. They can be tuned almost independently, but if they are tuned to the
same resonance frequency, they couple and form two hybridized modes separated by
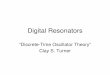
twice the coupling stength g between the resonators [27]. In Fig. 2.8, the transmis-
sion magnitude through such a two-resonator sample is displayed in dependency of
10

-0.4 -0.2 0.0 0.2 0.4
-1.0
-0.5
0.0
0.5
1.0
(a) Mode function at mag-netic flux � = 0
-0.4 -0.2 0.0 0.2 0.4
(b) Mode function at mag-netic flux � = �0/2
Figure 2.6: First three modes of the resonator with a junction at x = 0.(a) No flux is penetrating the SQUID loop.(b) The SQUID is penetrated by a magnetic flux of � = �0/2. Thejump is larger than without flux penetration.
the frequency. Both resonators are tuned to an uncoupled frequency of 7.133 GHz.
There are two peaks visible which correspond to the two modes of the coupled sys-
tem. They occur at 7.122 GHz and 7.144 GHz. It can be compared with two coupled
pendulums which also have two modes, one where the pendulums oscillate in phase
and another one in which they oscillate out of phase.
Figure 2.7: Schematic view of two capacitively coupled CPW tunable resonators.The white part is the conductor formed out of aluminium and the graypart is the silicon substrate. Red crosses indicate Josephson junctions.
11

Figure 2.8: The magnitude of the transmission through the resonators in depen-dency of the frequency. The two peaks correspond to the two eigen-modes of the coupled system at a lower frequency of flow = 7.122 GHzand a higher frequency fhigh = 7.144 GHz.
12


Chapter 3
Experimental techniques
In this chapter the details of the experiment are presented such as the sample design,
the experimental setup and conditions under which the experiments are performed.
The final part is about the approach to automate the process of bringing both
resonators to the same, arbitrarily chosen resonance frequency. For this purpose,
the determination of the right current values for the superconducting coil and the
antennas play an important role.
3.1 Sample
All components are fabricated by Michael Fischer in the context of his Ph.D. thesis.
The sample holder has a size of 31 mm ⇥ 27 mm ⇥ 10 mm, is made of copper and is
coated with gold. Inside this box, a superconducting chip with four ports is placed.
Two of these ports are connected to the resonator feed lines, while the other two
ports are connected to the feed lines of the antennas. Pictures of the actual sample
are shown in Fig. 3.1.
Superconducting chip
A topview of the superconducting chip is shown in Fig. 3.1 (a). The chip consists of
a silicon substrate of the size 10 mm ⇥ 6mm ⇥ 525 µm and a thin aluminium layer
on top of it, which is structured using eletron beam lithography. Two resonators are
coupled by a finger capacitor with a length of 15.6 µm [see Fig. 3.1 (c)]. The finger
capacitors which couple the resonators to the input and output lines both have a
length of 35.6 µm [see Fig. 3.1 (d)]. A SQUID with an area of 24 µm ⇥ 10 µm
is embedded in the middle of each resonator to induce a nonlinearity and make it
tunable.
14

On-chip flux antennas
The on-chip flux antennas are placed right next to each SQUID to apply a magnetic
field to the SQUID loop [see Fig. 3.1 (b)]. They induce a local magnetic field in order
to change the flux penetration through it. Note, that the antennas have to be placed
asymmetrically towards the SQUID, otherwise the field lines which penetrate the
SQUID loop cancel each other out. By varying the flux penetration of the SQUID,
the resonance frequency can be tuned as explained in section 2.3. Both antennas
are connected to a current source and can be controlled independently.
Superconducting coil
A superconducting coil is placed behind the superconducting chip and is control-
lable via a current source (’Keithley 6430’). When applying a current to the coil, it
induces a global magnetic field and tunes both resonators simultaneously. Coil and
current source are connected/disconnected via a persistent current switch [28].
15

Figure 3.1: Top view of the di↵erent components of the superconducting chip. Thealuminium is displayed as the light gray part, the substrate is the darkgray part.(a) The feed lines of the resonators are on the left and right, the portat the top is connected to the feed line of antenna 1, and the port atthe bottom is connected to the source of antenna 2.(b) Close-up of a SQUID loop and its on-chip flux antenna.(c) An enlargement shows the topview of the finger capacitor whichcouples both resonators to each other. The finger length is 15.6µm.(d) Finger capacitor which couples the resonator to the input and out-put line. The finger length is 35.6µm.
16

3.2 Experimental setup
The structure of two coupled nonlinear resonators corresponds to a Bose-Hubbard
chain with two lattice sites [14]. The system can be directly controlled, firstly during
the fabrication and secondly, during the experiment by changing the flux penetration
through the SQUID loop. By setting currents at the superconducting coil or the
antennas, a magnetic field is induced and as described in chapter 2.3, the resonance
frequency can be tuned by varying the flux through the SQUID. The coil and the
two antennas are connected to a current source as shown schematically in Fig. 3.2.
Therefore, their flux penetration is directly controllabe and so is the resonance
frequency. The input and output lines are separated by a circulator, and the ports
of the circulators are connected to the vector network analyzer (’KEYSIGHT PNA-
5222’) in the following configuration. Resonator 1 is connected with its input line
to port 1 and the output line to port 4. Further, the input line of resonator 2 is
connected to port 3, and the output line to port 2. Since the energy of microwave
photons is small, the sample is enclosed in a cryogenic setup, and the experiment
is performed at millikelvin temperature to avoid thermal excitations. The mean
temperature at the sample is approximately 27 mK. In order not to heat up the
inside of the cryostat, the currents which can be applied to the devices are limited.
The allowed currents are listet in Tab. 3.1. Icoil is the current applied at (’Keithley
6430’), Ia1 and Ia2 are the currents applied to the antenna 1 and antenna 2 current
source, repectively. The minimum value for the coil current is due to a hysteretical,
unstable behaviour, which was observed and investigated in previous measurements
[29]. Above a current of 8 µA, the behaviour is more stable.
Current Min. value Max. value
Icoil (µA) 8 40
Ia1 (µA) 0 2000
Ia2 (µA) 0 2000
Table 3.1: Minimum and maximum current values. Restriction criteria are to pre-vent heating up the inside of the cryostat and to avoid the hystereticbehavior of the superconducting coil at low coil currents.
17

Figure 3.2: Schematic setup of the experiment. The sample is enclosed into a cryo-genic setup, the mean temperature at the sample is 27 mK.
3.3 Resonator control program
A resonator control program should automate the process of setting the correct cur-
rent values at the coil and the antennas in order to tune the resonators into resonance
at a predefined frequency. The final program consists of two parts, firstly, one which
executes the calculation to find the correct current values for the superconducting
coil and the two antennas and secondly, one that sets the current at the devices.
The following calculation is based on a script written by Christian Besson who pro-
grammed the calculation of the wave vector k from the mode functions [29]. Using
the e↵ective inductance LJ and the plasma frequency !p, the implicit Eq. (2.12) can
be solved as a function of the flux. Together with the linear dispersion relation, in
which ⌫ is the phase velocity, the resonance frequency can be determined.
!res(�) = k(�) · ⌫ (3.1)
The currents set at the coil and the antennas can be converted linearly to the flux
through each SQUID loop by the following equations. It is assumed that the current
converts to the flux linearly. The currents Ia1 and Ia2 are the set at antenna 1 and
2, resepectively. The current applied at the coil is labeled with Icoil.
�res1(Ia1, Ia2, Icoil) = pa1, res1 · Ia1 + pa2, res1 · Ia2 + pcoil, res1 · Icoil +��res1 (3.2)
�res2(Ia1, Ia2, Icoil) = pa1, res2 · Ia1 + pa2, res2 · Ia2 + pcoil, res2 · Icoil +��res2 (3.3)
18

The parameters p (indices indicate flux source and a↵ected resonator in this order)
are the current-to-flux conversion parameters, which were determined by previous
straightforward calibration measurements, performed by Michael Fischer, in which
a sweep of each control current is performed while the other two are set to zero. The
values for the parameters can be found in Tab. 3.2 [30]. ��res1 and ��res2 denote
the background fluxes at each SQUID position. Note, that all conversion parameters
and the o↵sets are given in the unit of the magnetic flux quantum.
Parameter Value
Ic1 (µA) 1.60
pcoil, res1 (�0/µA) 0.069
pa1, res1 (�0/µA) 0.52 · 10�3
pa2, res1 (�0/µA) 1.05 · 10�3
��res1 (�0) 0.38
(a) Parameters for resonator 1
Parameter Value
Ic2 (µA) 1.85
pcoil, res2 (�0/µA) 0.153
pa1, res2 (�0/µA) 0.06 · 10�3
pa2, res2 (�0/µA) 0.6 · 10�3
��res2 (�0) 0.85
(b) Parameters for resonator 2
Table 3.2: Current to flux conversion parameters determined in previous calibrationmeasurements [30].
For both resonators, the angular resonance frequency given by Eq. (3.1) needs to be
converted into the frequency.
fset =!res1(�res1)
2⇡and fset =
!res2(�res2)
2⇡(3.4)
Afterwards, Eq. (3.4) are solved numerically for �res1 and �res2. The � dependence
comes from the implicit function for the wave vector k [see Eq. (2.12)]. In the
following step, the system of equations containing Eq. (3.2) and Eq. (3.3) is solved.
All three currents are calculated for a chosen range and stepsize and as a result,
one obtains a file with all possible frequency values. To each frequency value a coil
current and two antenna currents are assigned by the calculation. If those values are
set at the devices, the flux through the SQUID is regulated such that the resonators
are in resonance. As an example, if a resonance frequency of 7.0 GHz is chosen, a
coil current of Icoil = 22.498µA and two antenna currents of Ia1 = 1024.075µA and
Ia2 = 361.061µA, have to be set at the devices.
19

Chapter 4
Results
In this chapter, the results of the calculation are evaluated. Furthermore, the sim-
ulations are compared with the experimental results. The data which is presented
is used to test the program above. The measured signals are magnitude and phase
of the transmission (S21, S43) and the reflection (S41, S23) of resonator 1 and 2 with
the vector network analyzer.
4.1 Automatic setting of currents for the resonance
frequency
In order to automate the process of setting an arbitray resonance frequency for both
resonators, a subprogram for the home-made measurement program ’DeepThought’
of the Walther-Meißner-Institut (programmed in ’LabVIEW’ by ’National Instru-
ments’ ) is implemented. As an input it requires a frequency value and a file which
contains the current values for the coil and the two antennas. An extract of a current
parameter list can be found in the appendix A. The data from the file is read out,
then the current values assigned to the resonance frequency are set at each device
in the order shown in Fig. 4.1.
The calculation presented in section 3.3 provides all three currents to each frequency
for a given frequency range. The system is described by two equations, each de-
scribing one SQUID, and three variables, which correspond to the coil and antennas
currents, therefore one variable can be chosen freely.
fcal1 =!(�res1(Ia1,calc, Ia2,calc, Icoil,calc))
2⇡(4.1)
fcal2 =!(�res2(Ia1,calc, Ia2,calc, Icoil,calc))
2⇡(4.2)
20

Figure 4.1: Flow diagram of the resonator control program. The current valuescorresponding to the input resonance frequency are read out and thecurrents are set firstly at the source of the coil current, then at thesource of antenna 1. Finally, antenna 2 is set to its value.
To confirm that the calculated values yield to the correct resonance frequency, the
calculated current values are inserted into the primary Eq. (3.1) and the frequency
is recalculated.
error1,2 = fcal1, cal2 � fset (4.3)
An error is determined by forming the di↵erence between the set value and the
recalculated frequency. A plot of this error as a function of the set frequency can
be found in Fig. 4.2. The reason for the linear increase (decrease) on the lower
(upper) end of the graph is that the frequency tuning is limited by the maximum of
resonator 1 which has a lower critical current, and the minimum of the resonator 2
with a higher critical current (see Tab. 3.2). Thus, the resonators can be tuned in
an intervall from fmin = 5.604 GHz to fmax = 7.123 GHz.
The enlargement of Fig. 4.2 shows that a numerical accuracy of 5 · 10�15 GHz is
reached. The small errors are probability due to an insu�cient number of approx-
imation steps of the numerical algorithm which is used by the calculation program
to solve the equations.
As a conclusion, the calculations provide a high accuracy and make it possible to
find valid values for the whole tuning range. The achieved numerical accuracy is
more than su�cient, because the results for the currents are more accurate than the
accuracy which can be reached with the current devices. An arbitrary frequency
can be chosen and valid results for the currents are found.
21

Figure 4.2: Error of the recalculation dependent from the set frequency. The en-largement shows that a numerical accuracy of 5 · 10�15 GHz is reached.
4.2 Comparison of simulations and measurements
Measurements are taken in order to confirm the results predicted by the model. For
the evaluation, the results are overlayed with the simulations. In case the model
does not describe the tuning correctly, the model is improved by adjusting the
parameters or adding some if neccessary. All measurements are sweeps of either the
coil or one antenna current where, in each step, the phase and the magnitude of
the transmission (S21, S43) and the reflection (S41, S23) are measured with a vector
network analyzer.
4.2.1 Adjustment of current-to-flux conversion relation
The parameters used up to now are determined in measurements performed by
Michael Fischer where a single control current was sweeped while the other two
were set to zero. However, simple test runs reveal that the linear relation between
the current and the flux is an insu�cient description. Although an antenna induces
22

only a local magnetic field, a cross talk can be observed and the other resonator
is a↵ected as well. Until now, this is considered by a the cross talk conversion
parameters (pa1, res2 and pa2, res1) which take into account that the magnetic field
induced by the antennas is not locally confined. In the following measurement, this
cross talk and the periodicity of the tuning are investigated in more detail. The
measurement set is devided in three parts, starting with a coil sweep while both
antennas currents are set to zero. In each following step one antenna current is
added to the system. By this procedure, the same order as in the program (see
Fig. 4.1) is followed and the influence can be included in the evaluation. As we
will see later, the periodicy of the tuning changes when the total flux is increased.
Therefore, the model described by Eq. (3.2) and Eq. (3.3) needs to be improved.
From now on the following two functions with additional parameters in the exponent
of each control current are used for the conversion of applied current to the flux at
the resonators.
�res1(Ia1, Ia2, Icoil) = pa1, res1 · Iza1, res1
a1 + pa2, res1 · Iza2, res1
a2 + pcoil, res1 · Izc, res1
coil +��res1
(4.4)
�res2(Ia1, Ia2, Icoil) = pa1, res2 · Iza1, res2
a1 + pa2, res2 · Iza2, res2
a2 + pcoil, res2 · Izc, res2
coil +��res2
(4.5)
There are many possible e↵ects which could cause the observed change in flux pe-
riodicity. One possibility is that the applied fields cause a change in the magnetic
properties of the materials surrounding the sample, which, in turn, change the flux
at the sample position. Our model does not rely on a specific mechanism, but is
useful for a weak and continuous change in flux periodicity. The current-to-flux
parameters remain unchanged, but a set of additional parameters in the exponent
of the actual control current is identified. Thus, in the first step the parameters
zcoil, res1 and zcoil, res2 are determined. In the following measurement this parameter
is included and exponents for the antenna 1 current za1, res1 and za1, res2 are deter-
mined. Finally, za2, res1 and za2, res2 for the antenna 2 current are specified. All
identified additional parameters are listed in Tab. 4.1. Hence, in order to calculate
the resonance frequency [Eq. (3.1)] the external flux at each resonator is determined
by Eq. (4.4) and Eq. (4.5). Note, that the o↵set of the current-to-flux conversion
di↵ers between the measurements and has to be determined new for each evaluation.
The corresponding timescales are discussed in more detail in chapter 4.2.3.
23

Parameter Value
Ic1 (µA] 1.60
pcoil, res1 (�0/µA) 0.069
pa1, res1 (�0/µA) 0.52 · 10�3
pa2, res1 (�0/µA) 1.05 · 10�3
zc, res1 1.0305
za1, res1 1.012
za2, res1 0.983
��res1 (�0) 0.28
Parameter Value
Ic2 (µA) 1.85
pcoil, res2 (�0/µA) 0.153
pa1, res2 (�0/µA) 0.06 · 10�3
pa2, res2 (�0/µA) 0.6 · 10�3
zc, res2 1.0565
za1,res2 1.021
za2,res2 1
��res2 (�0) 0.85
Table 4.1: Updated conversion parameters for the adjusted flux-to-current conver-sion equations [see Eq. (4.4) and Eq.(4.5)] which are valid for coil currentsabove 20 µA and correspond to the red overlay function.
Step 1: Coil
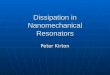
Figure 4.3 shows the phase of the reflection of resonator 1 (S41) and resonator 2
(S23), respectively. A coil sweep from 10 µA to 40 µA with antenna currents set
to Ia1 = 0µA and Ia2 = 0µA is performed. The signatures of resonator 1 and
resonator 2 are clearly visible and the graph can be split into two areas, one above
and one below 20 µA. Both areas are overlayed with the function for the resonance
frequency [Eq. (3.1)] using Eq. (4.4) and Eq. (4.5) for the current-to-flux conversion.
The part above 20 µA is overlayed with the red function and the part below with the
purple one. The overlay shows that the conversion from current to flux is not linear
[see Eq. (4.4) and Eq. (4.5)] for both areas and resonators. By overlaying the graph
with the model, the parameters zc, res1 = 1.0305 and zc, res2 = 1.0565 as exponents of
the coil current for the area above 20 µA are determined (see Tab. 4.1). Below 20 µA,
the instable behavior already mentioned in chapter 3 increases drastically. The o↵set
�� of both resonators have to be adjusted, as well as zc, res2. The parameters used
for the current-to-flux conversion below 20 µA are listed in Tab. 4.2. In addition,
a clear jump in the resonance frequency can be observed. It occurs at 38.5 µA
where the resonator frequency is discontinuous and drops from a value close to its
maximum value to a lower value.
Step 2: Antenna 1 sweep with constant coil current
In the second step, the coil current is set to Icoil = 22.778µA, while antenna 2 is
still set to zero. Both measurements are again overlayed with the function for the
24

Parameter Value
zc, res1 1.0305
��res1 (�0) 0.4
Parameter Value
zc, res2 1.0105
��res2 (�0) 0.46
Table 4.2: Updated conversion parameters for the adjusted flux-to-current conver-sion equations [see Eq. (4.4) and Eq. (4.5)] which are valid for coil cur-rents below 20 µA (purple overlayresonance frequency function).
resonance frequency [Eq. (3.1)] using the improved description for the current-to-
flux conversion [see Eq. (4.4) and Eq. (4.5)]. In this step the parameters zc, res1 and
zc, res2 remain unchanged and the parameters za1,res1 = 1.012 and za1,res2 = 1.021 are
identified. In contrast to resonator 1, which is tuned strongly by the applied current,
resonator 2 changes only slightly. Also from the small conversion parameter pa1, res2
one can see that resonator 2 is only weakly coupled to antenna 1. Since the induced
magnetic field by the antenna is typically local, this behavior is as expected.
Step 3: Antenna 2 sweep with constant antenna 1 and coil current
Finally, a sweep of antenna 2 is performed while the coil current is set to Icoil =
22.778µA and the antenna 1 current is set to Ia1 = 611.479µA. The parameters
determined until now stay constant and the last set of exponents for the antenna 2
current (za2,res1 and za2,res2) are identified. Since za2,res2 = 1, this parameter could
also be neglected. Comparing resonator 2 in Fig. 4.4 with resonator 1 in Fig. 4.5,
resonator 1 is tuned clearly stronger by antennna 2 than resonator 2 by antenna 1.
Parasitic paths and strong cross talks are possible causes for these di↵erences. To
get back to the calculation, both resonators should have the same uncoupled reso-
nance frequency of 7.031 GHz, when the currents are set as in Tab. 4.3. Having a
look again at resonator 2 in Fig. 4.5 the result can be confirmed at an antenna 2
current of Ia2 = 448.239µA which is marked in the graph with a white vertical line.
Parameter Value
Icoil (µA) 22.778
Ia1 (µA) 611.479
Ia2 (µA) 448.239
Table 4.3: Current values so that both resonators have an uncoupled resonancefrequency of 7.031 GHz
25

��
���
���
-�
-�
-�
�
�
�
��� ��� ��� ��� ��� ��� ���
��
���
���
-�
-�
-�
�
�
�
Figure 4.3: A coil sweep with Ia1 = 0µA and Ia2 = 0µA is performed. The up-per graph shows the phase of the reflection (S41) of resonator 1 and thelower graph shows the result for resonator 2 (S23). The graphs are over-layed with the simulation of the resonance frequency given by Eq. (3.1),using the current-to-flux conversion function in Eq. (4.4) and Eq. (4.5),respectively. Furthermore, the updated parameters of Tab. 4.1 are usedfor the area above 20 µA and the parameters of Tab. 4.2 fur the areabelow 20 µA. The discontinuity in resonator frequency of the second res-onator occuring at 38.5 µA is marked in the graph by a white verticalline.
All parameters found by this calibration are summarized in Tab. 4.1. Keep in mind,
that the parameters listed in the table above are only valid for coil currents greater
than 20 µA (red overlay resonance frequency function). For lower coil currents the
parameters of Tab. 4.2 have to be considered. As already mentioned in section 3.2,
previous measurements showed unstable, strong hysteretic behavior for low coil cur-
26

Figure 4.4: Antenna 1 sweep with Icoil = 22.778µA and Ia2 = 0µA. The current-to-flux convesion functions given by Eq. (4.4) and Eq. (4.5) are usedwith the parameters of Tab. 4.1 to calculate the overlay function of theresonance frequency [Eq. (3.1)].
Figure 4.5: Antenna 2 sweep with current values Ia1 = 611.479µA and Icoil =22.778µA and the reflection of both resonators is clearly visible. In or-der to describe the graph accurately, the resonance frequency [Eq. (3.1)]using the current-to-flux conversion Eq. (4.4) and Eq. (4.5) with the pa-rameters listed in Tab. 4.1.
27

rents. On this account low currents should be avoided anyway. Moreover, longer
pauses between the measurements and filling processes of the helium tank showed
that they change the o↵set behavior. Since the helium tank needs to be refilled every
five to six days, at least after the filling the o↵set-parameters have to be updated.
Still, the o↵set-value is stable for a few days for several measurements which are
performed right after another.
4.2.2 Unstable behavior of resonator 2
To confirm that the behavior is reproducable, the coil sweep of section 4.2.1 with
antenna currents set to zero is performed twice. Although the settings are identical,
the results di↵er from the previous ones (see Fig. 4.3) presented in section 4.2.1.
A more detailed look reveals that the parameter in the exponent (zcoil, res1) of res-
onator 1 stays constant for currents above 20 µA (red overlay resonance frequency
function) and only changes for lower values (purple overlay resonance frequency
function). On the contrary, comparing the second resonator in Fig. 4.3 and Fig. 4.6,
the parameter zcoil, res2 di↵ers for both areas from the ones listed in Tab. 4.1 and
Tab. 4.2. The parameters used to calculate the flux at the resonators using Eq. (4.4)
and Eq. (4.5) are summarized in Tab. 4.4. It has to be mentioned that between these
two measurements the helium dewar of the cryostat is refilled. Thus, a likely cause
for the di↵erent behavior would be a disturbance by trapped fluxes in other parts of
the sample, which could occur during filling proccesses of helium into the cryogenic
system. In general, resonator 2 seems to be a↵ected more strongly by such changes
in the magnetic environment.
As a consequence, calibration would be necessary at least after every refill of the
helium dewar. A whole coil sweep in the coil range of interest should be performed
as a calibration procedure. Since the tuning is periodically, one can narrow the coil
range and choose the one with the best results, for instance a coil current between
20 µA and 35 µA.
4.2.3 Discussion
As already discussed, Eq. (3.2) and Eq. (3.3) are successfully improved by adding
an exponent to each current. Now, an accurate description of the tuning is given
by Eq. (4.4) and Eq. (4.5), which is fundamental for further calculations and sim-
ulations. A system calibration routine in the form of a three step measurement is
established and all parameters are identified. Nevertheless, more measurements are
28

Parameter Res. 1 above 20 µA
zc, res1 1.0305
��res1 (�0) 0.28
Parameter Res. 1 below 20 µA
zc, res1 0.8550
��res1 (�0) 0.75
Parameter Res. 2 above 20 µA
zc, res2 1.0305
��res2 (�0) 0.3
Parameter Res. 2 below 20 µA
zc, res2 1.0005
��res2 (�0) 0.64
Table 4.4: Updated conversion parameters for the adjusted flux-to-current conver-sion equations [see Eq. (4.4) and Eq. (4.5)] for the second measurement.
neccessary to improve the level of control over the two coupled resonators. A trial
and error of randomly chosen frequencies from the mathematical calculation should
performed in order to confirm the model.
Still, the major issue is the tuning behavior of the superconducting coil. Because
of the fact that the coil induces a global magnetic field, one would expect both
resonators to be tuned in a very simliar way. The contrary experimental observations
indicate an inhomogeneous field over the sample chip. Furthermore, time-varying
flux o↵sets and nonperiodic behavior complicate the predictions. Additionally, the
magnetic field of the coil does not only depend on the current applied to the coil, but
also on its history [31]. If higher currents are applied to the coil previously, currents
can be trapped inside the superconducting coil. To minimize irregularities caused by
history, at any setting an up sweep with a su�ciently slow rate starting at current
zero is performed. However, it can not be excluded with certainty that no current is
trapped inside the superconducting coil because setting the current at the device to
zero only means that no additional current is applied. An enclosing of fluxes could
for instance occur during the filling process of the helium dewar which has to be
performed every five to six days. In our measurements, drastic changes of the o↵sets
appear in both coil sweeps at Icoil = 38.5µA (see Fig. 4.3) or Icoil = 38.8µA (see
Fig. 4.6). These flux jumps occur at very similar current values which indicates a
reproducable behavior. Consequently, coil currents above 35 µA should be avoided.
Moreover, the overlay function of the simulation does not describe the tuning with a
single parameter set for all coil currents. On this account the evaluation is realized
by separating the sweep into two areas above and below 20 µA. Possibly, more flux
jumps occur at coil currents below 20µA and at frequencies lower than 6.9 GHz
which are not visible in the measurement results. In the end, the o↵set parameter
is stable for a set of measurement performed right after another, hence a few days,
29

��
���
���
-�
-�
-�
�
�
�
��� ��� ��� ���
��
���
���
-�
-�
-�
�
�
�
Figure 4.6: Coil sweep with Ia1 = 0µA and Ia2 = 0µA. The course of resonator1 is overlayed with the simulation of the resonance frequency given byEq. (3.1), using the same parameters as in the first measurement. Tooverlay the lower graph, which shows resonator 2, the parameters haveto be updated. The updated parameters are summarized in Tab. 4.4.The course is discontinued by flux jump occuring at 38.8 µA which ismarked by a white vertical line.
but after the filling process of the helium dewar a calibration is neccessary.
A longterm improvement could be expected by replacing the superconducting coil
by a normal conducting coil. Then, however, a heating inside the cryostat would
occur, but the flux trapping inside the coil completely excluded. In addition, the
history of the coil would be less relevant. Both aspects would improve the stability
of the parameters enormously. Another approach would be to tune both resonators
only with the two antennas and use only constant coil currents. That would lead
30

to a more stable and therefore predictable behavior. The downside of this approach
is that the frequency tuning is limited to a smaller frequency range. In practice,
such a reduced range could be su�cient, because the antennas only have to cover
one period of the maximum supercurrent of the SQUID (see Fig. 2.4). This scenario
could be realized with the current setup by setting a constant coil current and the
single resonators could be adjusted by using only the antennas. Even though not any
arbitrary resonance frequency can be chosen because the calculation does not provide
valid solutions for all frequencies, valid solutions close to the desired frequency can
be found. Since the current sources are limited to set the values with an accuracy of
10�4 µA, an accuracy of 1 MHz can be reached for the frequency, which is completely
su�cient for our purpose. Because of the instable behavior below 20µA and the
discontiunous jumps around 38µA, choosing a smaller frequency range is favoured.
One should focus on a small range where the course of the tuning is more steady.
Coil currents within the range of 20 µA to 35 µA would provide a good basis.
Nevertheless, the determined parameters are only valid until the time of a filling
process of the helium dewar. On this account, a calibration process would be nec-
cessary, to simplify and speed up the evaluation of the results. A possible action
to determine the o↵set �� could be structured as follows. As a reference the first
maximum above 20 µA of the coil sweep is chosen. By comparing the reference cur-
rent to the coil current of the maximum in the uncalibrated setup, the o↵set can be
determined and inclued in further measurements. By running the same procedure
with the other two parameters a complete calibration can be performed.
To summarize, with the mathematical description of the tuning behavior for both
resonators in dependency of three parameters, the coil current and two antenna
currents, the resonators can be set to arbitrary degenerate frequencies within their
tuning range. The best approach is to choose a constant coil current to bring both
resonators close to the frequency of interest. Because the most stable behavior is
observed in a range of 20 µA to 35 µA, a coil current within this range should be
chosen. Afterwards the fine-tuning can be achieved by using only the antennas.
Since the parameters are only valid for only a few days until the next filling process,
a calibration should be performed after each filling procedure of the helium dewar.
By following these proposals, the results are most predictable. Therefore, further
measurements at di↵erent frequencies and after several helium refills should be taken
in order to confirm the results.
31

Chapter 5
Summary and Outlook
The primary ambition of this work is to automate the process controlling the res-
onance frequencies of two coupled nonlinear resonators. For this purpose two pro-
grams are created. One calculates the right current values, based on a mathematical
description of the tuning. The description uses linear relations to convert the ap-
plied currents into the flux through the SQUID plane [see Eq. (3.2) and Eq. (3.3)].
The second program allows to set the current value for each device by just inserting
the desired resonance frequency. The accuracy of the calculation program is satis-
fyingly high and the subprogram works as expected. To confirm accordance of the
simulations with the experimental results, two sets of measurements are taken to
investigate the behavior. It turns out that the so far used mathematical description
is insu�cient, which is why additional parameters in the exponent to each current
are identified to describe the system more accurately [see Eq. (4.4) and Eq. (4.5)].
Moreover, the tests reveal that the o↵set of the current-to-flux dependence is a
strongly changing parameter and is only stable between two refilling processes of
the helium dewar. On this account a calibration process is suggested to bring more
regularity into the tuning procedure. Furthermore, the behavior of the supercon-
ducting coil is not completely reproducible which is why a working range should
be chosen. The coil current it set to a constant value and only the two antennas
are used to tune the resonators. By following this structure, the history-dependent
behavior and hysteretic e↵ects of the superconducting coil are reduced to a mini-
mum. A convenient current range for the coil would be between 20 µA and 35µA
because in that range a quite stable behavior is observed. If these two aspects, the
calibration and the restriction of the coil current range are considered, the system
is controllable with a, for our purposes, su�cient accuracy.
To look ahead, as soon as the control of the two coupled resonators is functional,
the system can be expanded to a larger system with more components. Because of
32

the good scalability and the flexibility in design which is aready mentioned in the
beginning, larger and more complex systems can be constructed. First attempts
are already made by creating a network of coupled resonators [14] or a network of
pairwise coupled qubits [32] which already show successes. In the end, the approach
of using superconducting quantum circuits is very promising for the field of quantum
simulation.
33

Appendix A
Extract of the calculation results
34

35

Bibliography
[1] A. Moberg, “The Nobel Prize in Physics 2012”, (2012), URL https://www.
nobelprize.org/uploads/2018/06/press-18.pdf.
[2] A. Steane, “Quantum computing”, Reports on Progress in Physics 61, 117
(1998).
[3] I. M. Georgescu, S. Ashhab, and F. Nori, “Quantum simulation”, Rev. Mod.
Phys. 86, 153 (2014).
[4] R. P. Feynman, “Simulating physics with computers”, International journal of
theoretical physics 21, 467 (1982).
[5] N. M. Hugenholtz, “Quantum Theory of Many-Body Systems”, Reports on
Progress in Physics 28, 201 (1965).
[6] M. Greiner, O. Mandel, T. Esslinger, T. W. Hansch, and I. Bloch, “Quantum
phase transition from a superfluid to a Mott insulator in a gas of ultracold
atoms”, Nature 415, 39 (2002).
[7] J. Clarke and F. K. Wilhelm, “Superconducting quantum bits”, Nature 453,
1031 (2008).
[8] T. Niemczyk, F. Deppe, H. Huebl, E. P. Menzel, F. Hocke, M. J. Schwarz,
J. J. Garcia-Ripoll, D. Zueco, T. Hummer, E. Solano, A. Marx, and R. Gross,
“Circuit quantum electrodynamics in the ultrastrong-coupling regime”, Nature
Physics 6, 772 (2010).
[9] I. Bloch, J. Dalibard, and W. Zwerger, “Many-Body Physics with Ultracold
Gases”, Reviews of Modern Physics 80, 885 (2008).
[10] M. Lewenstein, A. Sanpera, V. Ahufinger, B. Damski, A. Sen(De), and U. Sen,
“Ultracold Atomic Gases in Optical Lattices: Mimicking Condensed Matter
Physics and Beyond”, Advances in Physics 56, 243 (2007).
36

[11] R. Blatt and C. F. Roos, “Quantum Simulations with Trapped Ions”, Nature
Physics 8, 277 (2012).
[12] R. Gerritsma, G. Kirchmair, F. Zahringer, E. Solano, R. Blatt, and C. F. Roos,
“Quantum Simulation of the Dirac Equation”, Nature 463, 68 (2010).
[13] M. Leib and M. J. Hartmann, “Bose-Hubbard dynamics of polaritons in a
chain of circuit quantum electrodynamics cavities”, New Journal of Physics 12,
093031 (2010).
[14] M. Leib, F. Deppe, A. Marx, R. Gross, and M. J. Hartmann, “Networks of
Nonlinear Superconducting Transmission Line Resonators”, New Journal of
Physics 14, 75024 (2012).
[15] A. A. Houck, H. E. Tureci, and J. Koch, “On-chip quantum simulation with
superconducting circuits”, Nature Physics 8, 292 (2012).
[16] C. P. Wen, “Coplanar Waveguide: A Surface Strip Transmission Line Suitable
for Nonreciprocal Gyromagnetic Device Applications”, IEEE Transactions on
Microwave Theory and Techniques 17, 1087 (1969).
[17] B. Bhat and S. K. Koul, Stripline-like Transmission Lines for Mi-
crowave Integrated Circuits (New Age International, 1989), ISBN 978-
81-224-0052-6, URL https://books.google.de/books?id=EDVlt8hXpzAC&
printsec=frontcover&dq=B.+Bhat+and+S.+K.+Koul,+Stripline-like+
Transmission+Lines+for+Microwave+Inte-+grated+Circuits&hl=de&sa=
X&ved=0ahUKEwjkxuTs8L3gAhVopIsKHR96AdYQ6AEIKTAA#v=onepage&q=B.
BhatandS.K.Koul%25.
[18] P. K. Day, H. G. LeDuc, B. A. Mazin, A. Vayonakis, and J. Zmuidzinas, “A
broadband superconducting detector suitable for use in large arrays”, Nature
425, 817 (2003).
[19] I. Siddiqi, R. Vijay, M. Metcalfe, E. Boaknin, L. Frunzio, R. J. Schoelkopf, and
M. H. Devoret, “Dispersive measurements of superconducting qubit coherence
with a fast latching readout”, Physical Review B 73, 54510 (2006).
[20] M. Goppl, A. Fragner, M. Baur, R. Bianchetti, S. Filipp, J. M. Fink, P. J. Leek,
G. Puebla, L. Ste↵en, and A. Wallra↵, “Coplanar Waveguide Resonators for
Circuit Quantum Electrodynamics”, Journal of Applied Physics 104, 113904
(2008).
37

[21] D. M. Pozar, Microwave engineering (John Wiley & Sons, 2009), 4th
ed., ISBN 978-0-470-63155-3, URL http://bbs.hwrf.com.cn/downpeef/
Microwave.Engineering,.David.M..Pozar,.4ed,.Wiley,.2012.pdf.
[22] A. A. Golubov, M. Y. Kupriyanov, and E. Il’ichev, “The current-phase relation
in Josephson junctions”, Rev. Mod. Phys. 76, 411 (2004).
[23] R. Gross and A. Marx, URL https://www.wmi.badw.de/teaching/
Lecturenotes/AS/AS_Chapter4.pdf.
[24] J. Q. You and F. Nori, “Atomic physics and quantum optics using supercon-
ducting circuits”, Nature 474, 589 (2011).
[25] J. Bourassa, F. Beaudoin, J. M. Gambetta, and A. Blais, “Josephson-Junction-
Embedded Transmission-Line Resonators: From Kerr Medium to in-Line Trans-
mon”, Physical Review A 86 (2012).
[26] M. Leib and M. J. Hartmann, “Many Body Physics with Coupled Transmission
Line Resonators”, Physica Scripta 2013, 14042 (2013).
[27] A. Baust, E. Ho↵mann, M. Haeberlein, M. J. Schwarz, P. Eder, J. Goetz,
F. Wulschner, E. Xie, L. Zhong, F. Quijandria, and Others, “Tunable and
Switchable Coupling between Two Superconducting Resonators”, Physical Re-
view B 91, 14515 (2015).
[28] E. P. K. Menzel, “Propagating Quantum Mircowaves: Dual-Path State Re-
construction and Path Entanglement”, Ph.D. thesis, Technische Universitat
Munchen, Munich (2013), URL https://www.wmi.badw.de/publications/
theses/Menzel_Doktorarbeit_2013.pdf.
[29] C. Besson, “Quantum Simulations of Many-Body Systems with Su-
perconducting Devices”, Ph.D. thesis, Technische Universitat Munchen
(2017), URL https://www.wmi.badw.de/publications/theses/Besson,
Christian_Masterarbeit_2017.pdf.
[30] M. Fischer, “Private communication”, (2018).
[31] B. Taquet, “Superconducting coil degradation”, Journal of Applied Physics 36,
3250 (1965).
[32] D. I. Tsomokos, S. Ashhab, and F. Nori, “Fully connected network of super-
conducting qubits in a cavity”, New Journal of Physics 10 (2008).
38